日本機械学会 2012 年度年次大会 [2012.9.9‐12]
CopyrightⒸ2012 一般社団法人 日本機械学会
[No.12-1] 日本機械学会 2012 年度年次大会講演論文集 〔2012.9.9‐12,金沢〕
G010014
表面応力と表面弾性定数を考慮した半無限異方性弾性体の凝着解析
* 林 高雄*1,古口 日出男*2Adhesion analysis for anisotropic materials considering surface stress and surface elasticity
Takao HAYASHI
*1and Hideo KOGUCHI
*2*1 Department of Mechanical Engineering, Nagaoka University of Technology 1603-1, Kamitomioka, Nagaoka, Niigata, 940-2188 Japan
The adhesion analysis for anisotropic materials considering surface stress and surface elasticity is performed. An adhesive force between two surfaces is calculated by Lennard-Jones potential function. To converge the deformation due to the adhesive force is used an under-relaxation method. A relationship between adhesion force and indentation depth is investigated.
Key Words : Adhesion, Anisotropic elasticity, Surface stress, Surface elasticity.
1. 緒 言
近年,ハードディスク等の微小物体において,微小機械の運動による接触・凝着が問題となり,マイクロトラ イボロジーとして多くの研究が行われている.ナノスケールでは原子の影響を考慮した応力・変形解析が行われ ており,分子動力学法や原子の作用を考慮した弾性理論が用いられている.接触理論としてHertz理論があるが,
凝着の考えを含んでいない.Hertz理論に凝着による表面エネルギーを考慮した凝着理論としてJKR理論(1)があ る.接触領域と非接触領域に分子間力による凝着力を考慮した弾性球に対する凝着理論としてDMT理論(2)があ る.また,Greenwood(3)およびAttard(4)らは球と平面の二面間にLennard-Jones型のポテンシャルを導入して凝着 問題を解いた.古口(5)は表面応力を考慮した等方生弾性体の凝着問題を解析した.ところで,ナノスケールの領 域では,結晶構造による材料異方性の影響を考慮する必要があると考えられる.そこで本研究では,古口(6)が導 出した表面応力と表面弾性定数を考慮した半無限異方性弾性グリーン関数を用いて凝着解析を行い,凝着力に対 する表面応力の影響を調査する.
2. 表面応力と表面弾性定数を考慮した半無限異方性グリーン関数
詳細については文献(6)を参照し,ここではその概略を述べる.異方性材料における平衡方程式は変位ukと弾性 定数Cijklを用いて,以下のように表すことができる.
Cijkluk,lj =0 (1)
表面応力と表面弾性定数を考慮した境界条件は以下の式で表すことができる.
1)表面に対して接線方向の境界条件
!i"#i$%"&,& =t" (2)
2)表面に対して法線方向の境界条件
*1 正員,長岡技術科学大学大学院 工学研究科(〒940-2188 新潟県長岡市上富岡町1603-1)
*2 正員,フェロー,長岡技術科学大学 機械系 E-mail: [email protected]
!i3"i#$µ%&µ%"3=t3 (3) ここで,σijはバルク応力,νiは法線ベクトル,!"#は表面応力,!"#は表面の曲率テンソル,tiは作用力ベクトル である.また,添字α, β, µは1,2(表面内に対応),iは1,2,3の値をとる.表面応力と表面弾性定数の間には以下 の関係がある.
!"# =!"#0 +d"#$%&$%s (4)
ここで,!"#0 は表面ひずみが無いときの表面応力,d!"#$は表面弾性定数,!"#s は表面ひずみである.式(4)を式(2),
(3)に代入し,平衡方程式を用いて荷重fが作用したときの変位uを表すと,
u
(
x1,x2,x3)
= 4!i #$%
#$+$"1A e#ip*"x3%
+$(
B+i"F)
#1fe#1(&1x1+&2x2)d&1d&2 (5)と表すことができる.ここで, e!ip*"x3 =diag e#$ !ip1"x3,e!ip2"x3,e!ip3"x3%&,A=
[
a1, a2, a3]
, B=[
b1, b2, b3]
,b=
(
RT+pT)
a=!1p(
Q+pR)
a,{
Q+p(
R+RT)
+p2T}
a=0で,F=
d1!1"n!n" d1!2"n!n" 0 d2!1"n!n" d2!2"n!n" 0
0 0 #µ!0 nµn!
$
%
&
&
&
'
( )) )
a (6)
である.またQik=Cijksnjns,Rik=Cijksnjms,Tik=Cijksmjms,m=[0, 0,1]T ,n=[n1,n2, 0]T =[cos!,sin!, 0]Tである.
3. 凝着解析 3・1 分子間力ポテンシャル
本研究での凝着解析モデルを図1に示す.ここで,Rは球状圧子の半径,δは剛体移動量,gijは二面間の間 隔を示す.図1の球状圧子を平面に近づけていき,gijを用いてLennard-Jones型ポテンシャルを用いて表面力を算 出する.Lennard-Jones型ポテンシャルは次式で表すことが出来る.
!
(
x1,x2)
=83"# g#ij
$
%
&
&
' ( ))
3
* #
gij
$
%
&
&
' ( )) + 9
, --
.
/
00 (7)
また,式(7)を数値積分し,表面力pを求める.
p x
(
1,x2)
=#
"!(
x1,x2)
dA=83$% g%ij
&
' ((
)
* ++
3
, %
gij
&
' ((
)
* ++ - 9
. //
0
1 22 dA
"
#
(8)Figure 1 Model for adhesion analysis x z
δ x
gij
ここで,Ωは解析領域,Aは解析領域の面積を示す.
3・2 凝着解析
Lennard-Jones型ポテンシャルでは,平衡原子間距離の近傍では非常に大きな斥力または引力が生じ平衡状態を
導出するのが困難である.そこで,本研究では表面力pについて緩和法を用いて解析を行うことにする.ここで いう緩和法とは,解析中に求められた表面力pに対して1よりも小さな係数αを乗ずることで,実際よりも減少 させて,反復計算により本来の解を求めていく手法である.反復計算の計算回数は乗じた係数の逆数とし,反復 回数だけ繰り返したときに平衡状態であると判断する.本研究では係数αを10-5として解析を行った.
Lennard-Jones型ポテンシャルで求めた表面力に対する表面の変位分布は,接触解析で用いられているLiuらが
提案した(7)離散畳み込みと高速フーリエ変換(DC-FFT)法を用いて算出した.
4. 解析結果 4・1 解析条件
本研究では異方性弾性体に対して,球状圧子が接近する凝着解析を行う.解析モデルとして,異方性弾性体は 平とし,球状圧子は R=100nmで剛体であるとする.Lennard-Jones型ポテンシャルで用いる定数は,平行原子間
距離εを0.2nm,表面エネルギーωを2.5N/mとした.解析対象となる異方性弾性体にはCu(100)およびCu(111)を
用いた.Cu(100)の弾性定数はC1111=169.9GPa,C2222=122.6GPa,C1212=76.2GPa である.また,Cu(111)の弾性定数
は Cu(100)の弾性定数に対して座標変換を行うことで求めた.それぞれの表面応力および表面弾性定数は分子動
力学法により算出し,表1にまとめた.これらの値を用いて表面グリーン関数より変位分布を算出する.凝着解 析では二面間の間隔を2.0nmから解析を行い,0.1nmずつ圧子を下げて解析を行った.
4・2 変位分布および表面力分布
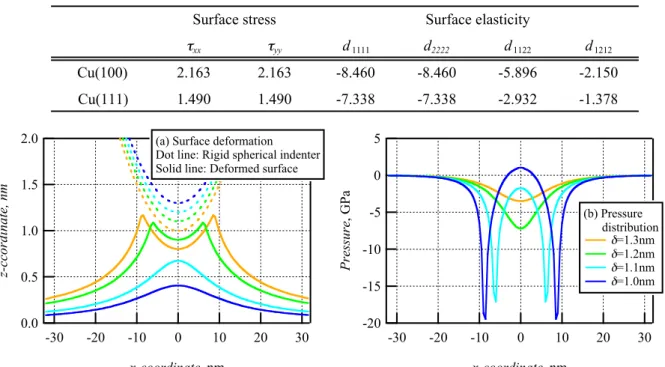
はじめに,Cu(100)で凝着が生じた前後のy軸上の変形図および圧力分布を図2に示す.図2(a)が表面と圧子の 変形図で,図2(b)がそのときの圧力分布である.ここで,圧力分布は負が表面を引き合う圧力,正が表面が反発 し合う圧力を示している.図2(a)のように押し込み量δ=1.2nmでは凝着は発生せずに二面間は大きくはなれてい る.ところがδ=1.0nmで凝着が生じ,特に中心付近が圧子に近づいていることがわかる.図2(b)の圧力分布のよ
うに,δ=1.2nmでは凸形状であるが,δ=1.1nmでは中心付近はへこみその周辺部分で最大の表面力が生じている
2.0 1.5 1.0 0.5 0.0
z-ccordinate, nm
-30 -20 -10 0 10 20 30
x-coordinate, nm (a) Surface deformation Dot line: Rigid spherical indenter Solid line: Deformed surface
-20 -15 -10 -5 0 5
Pressure, GPa
-30 -20 -10 0 10 20 30
x-coordinate, nm
(b) Pressure distribution
!=1.3nm !=1.2nm !=1.1nm !=1.0nm
Figure 2 Deformation and pressure distribution for Cu(100) Table 1 Surface stress and surface elasticity
!xx !yy d1111 d2222 d1122 d1212
Cu(100) 2.163 2.163 -8.460 -8.460 -5.896 -2.150
Cu(111) 1.490 1.490 -7.338 -7.338 -2.932 -1.378
Surface stress Surface elasticity
ことがわかる.このように,凝着発生時には急激な表面力の変化を伴うことがわかる.
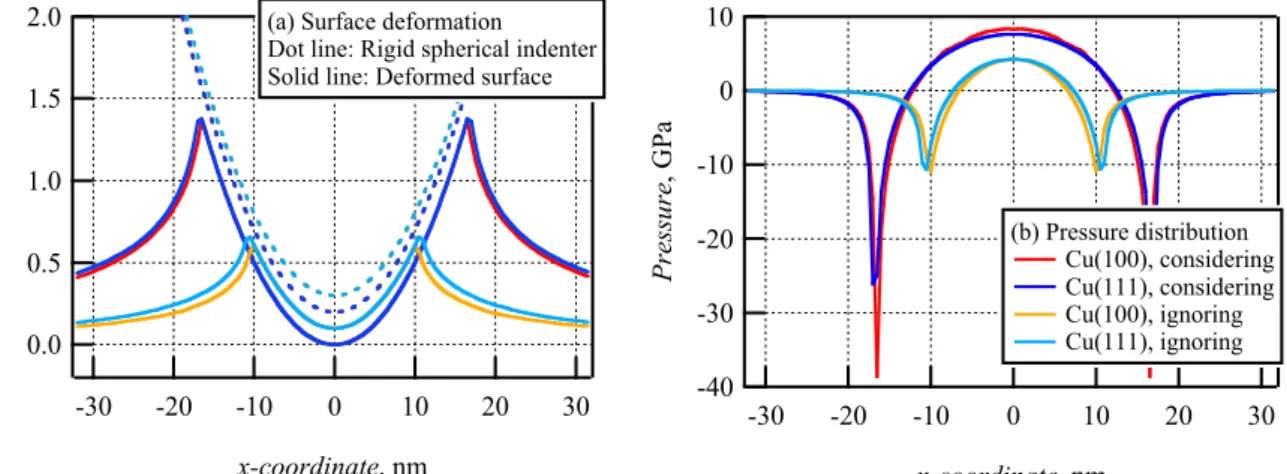
つぎに,図3に示す最大凝着力が生じたときの変形図と圧力分布を調べる.最大凝着力はCu(100)ではδ=0.2nm
でCu(111)はδ=0.3nmで生じたので,そのときの結果を図3に示す.ここで,図中の”considering”は表面応力と表
面弾性定数を考慮した結果であり,”ignoring”は表面応力と表面弾性定数を考慮しない結果である.まず,図2(a)
のようにCu(100)とCu(111)で変形図が大きく異なることがわかる.これは剛体変位量がそれぞれ異なるためであ
り,また材料の硬さも大きく異なるので変形図のような大きな違いが表れたと考えられる.とれに伴い,圧力分 布も大きく異なり,最大の圧力分布では約4倍の差があることがわかる.
4・3 凝着力と剛体変位の関係
凝着力pと剛体変位δの関係について調べる.合力についてはπRωを,剛体変位についてはµの無次元パラメ ータを用いて正規化した.ここでµ =
(
R!2/K2"3)
1/3,K=#$(
1!"12)
/E1+(
1!"22)
/E2%&
!1であり,ここでE1,E2と ν1,ν2はそれぞれ凝着している二つの物体のヤング率とポアソン比である.本解析でKの値は凝着解析と同じ曲 率の剛体球状圧子による接触解析を行い,Hertz理論からぞれぞれの材料について算出した.その値はCu(100), consideringで149GPa,Cu(100), ignoringは134GPaであり,またCu(111), consideringで176GPa,Cu(111), ignoring は144GPa.正規化した解析結果を図4に示す.凝着力の最大値はCu(100), consideringで1372nN,Cu(100), ignoring は1322nNであり,またCu(111), consideringで1329nN,Cu(111), ignoringは1269nNである.最大付着力の違いは 無次元パラメータµにより特徴づけることができ,本解析ではKの値で特徴づけられると考えられる.しかしな
2.0 1.5 1.0 0.5 0.0
z-ccordinate, nm
-30 -20 -10 0 10 20 30
x-coordinate, nm (a) Surface deformation Dot line: Rigid spherical indenter Solid line: Deformed surface
-40 -30 -20 -10 0 10
Pressure, GPa
-30 -20 -10 0 10 20 30
x-coordinate, nm
(b) Pressure distribution Cu(100), considering Cu(111), considering Cu(100), ignoring Cu(111), ignoring
Figure 3 A comparison of deformation and pressure distribution for Cu(100) and Cu(111)
1.6 1.2 0.8 0.4 0.0
-P/!"R
1.5 1.0 0.5 0.0 -0.5 -1.0
-#/µ Cu(100), considering Cu(100), ignoring Cu(111), considering Cu(111), ignoring
Figure 4 Relationship between the dimensionless total force and the dimensionless penetration depth
Table 1 Indentation modulus K
Surface stress, N/m
Cu(100), GPa
Cu(111), GPa
0.1 134 145
0.5 134 143
1.0 135 151
1.5 138 176
2.0 146 218
2.5 158 280
3.0 174 376
がらKの値によらず,Cu(100)のほうがCu(111)よりも最大凝着力が大きい傾向である.接触解析で求めたKの値 には表面応力の影響が含まれているため,この傾向は材料の異方性によるものであると考えられる.
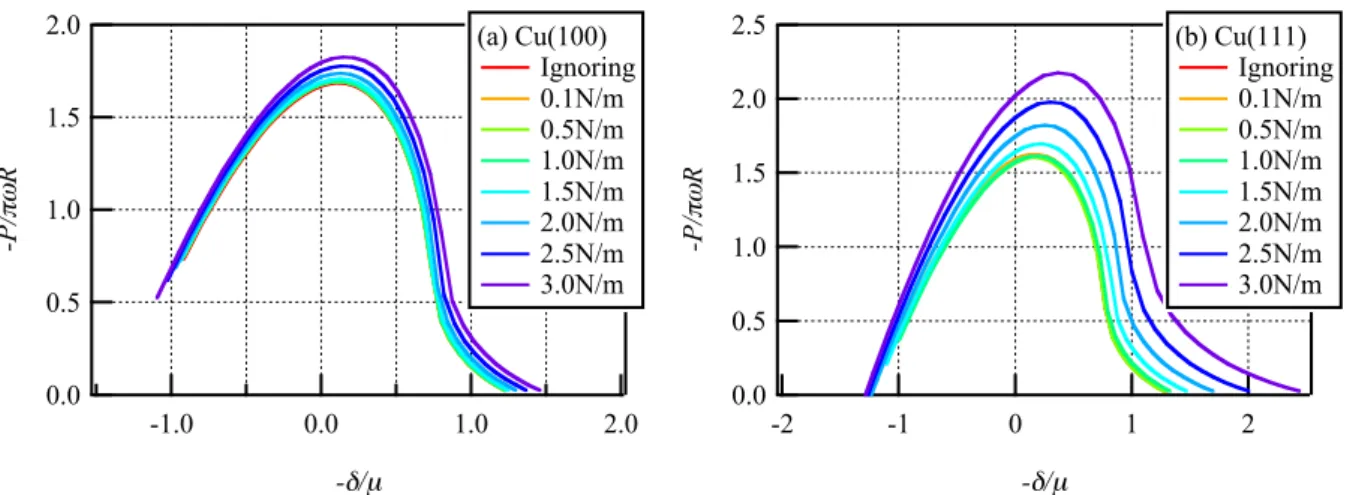
次に,表面応力の値を任意に与えたときの凝着力pと剛体変位δの関係を図5に示す.図5(a)はCu(100),図 5(b)はCu(111)の結果をそれぞれ示している.Kの値は同様に接触解析により算出しその値を表1にまとめた.
Cu(100)と Cu(111)を比較すると,Cu(111)のほうが表面応力により最大凝着力が大きくなっていることがわかる.
これは材料の見かけの弾性定数Kの値が表面応力の影響により大きくなっているためである.また,それぞれの 最大凝着力はJKR理論で算出された最大凝着力-1.5πωRより大きく,Cu(111)の3.0N/mではDMT理論で算出さ れた最大凝着力-2πωRよりも大きな値である.これは,本解析では分子間力としてLennard-Jones型ポテンシャル を用いているためであると考えられる.
5. 結 言
本研究では,表面応力と表面弾性定数を用いた半無限異方性弾性体のグリーン関数を用いて凝着解析を行い次 のことを明らかにした.
(1)Cu(100)およびCu(111)の凝着力と剛体変位の関係を明らかにし,最大凝着力は材料異方性の影響も受ける と考えられることがわかった.
(2)表面応力の値を任意に与えたときの凝着力と剛体変位を求め,すべての条件での最大凝着力はJKR理論に よる最大凝着力-1.5πωRより大きく,Cu(111),表面応力3.0の場合はDMT理論による最大凝着力-2πωRよりも大 きな値となった.
文 献
(1) Johnson, K. L., Knedall, K. K., and Roberts, A. D., “surface energy and the contact of elastic solids”, Proc. R. Soc. Lond. A., Vol. 324 (1971), pp.301-313.
(2) Derjaguin, B. V., Muller, V. M., and Toporov, YU. P., “Effect of contact deformations on the adhesion of particles”, J. Colloid Interface Sci., Vol. 77 (1976) pp.314-325
(3) Greenwood, J. A., “Adhesion of elastic spheres”, Proc. R. Soc. Lond. A., Vol.453 (1997), pp3 1277-1297.
(4) Attrad. P., and Parker, J. L., “Deformation and adhesion of elastic bodies in contact”, Phys. Rev. A. Vol.46 (1992), 7659-7971.
(5) 古口 日出男, “表面応力を考慮した接触凝着解析(第2報,JKR理論との比較)”,日本機械学会論文集A編,Vol.
70, No. 697 (2004), pp. 1332-1340.
(6) Koguchi, H., “Surface Green Function With Surface Stresses and Surface Elasticity Using Stroh's Formalism”, Trans. ASME.
J. Appl. Mech., Vol. 75 (2008), 061014.
(7) Liu, S., Wang, Q., and Liu, G., “A versatile method of discrete convolution and FFT (DC-FFT) for contact analysis,” Wear, Vol. 243 (2000), pp.101-111.
2.0
1.5
1.0
0.5
0.0
-P/!"R
2.0 1.0
0.0 -1.0
-#/µ
(a) Cu(100) Ignoring 0.1N/m 0.5N/m 1.0N/m 1.5N/m 2.0N/m 2.5N/m 3.0N/m
2.5 2.0 1.5 1.0 0.5 0.0
-P/!"R
2 1
0 -1
-2
-#/µ
(b) Cu(111) Ignoring 0.1N/m 0.5N/m 1.0N/m 1.5N/m 2.0N/m 2.5N/m 3.0N/m
Figure 5 Relationship between the dimensionless total force and the dimensionless penetration depth for several values of surface stress