高齢者における歩行器・歩行車を使用した際の歩行分析
9
0
0
全文
(2) 高齢者における歩行器・歩行車を使用した際の歩行分析. 451. 若年者を対象として,椅子付き歩行車を使用した際の矢. とは,高齢者の関節負担軽減の視点から補助具を選定す. 状面の下肢関節モーメント,関節角度の変化を述べた報. る一助となると考えられる。そこで,本研究の目的は,. 告. 15). がある。. 健常高齢者を対象とし,複数の歩行器・歩行車を使用し. 上記のように補助具は関節負担を軽減できる可能性が. た際の歩行分析を,膝関節への力学的関節負担を反映す. あり,膝 OA 患者の移動手段としてテクノエイド協会. る KAM に着目して行い,どの補助具が関節負担の軽減. より推奨されている。また,TKA 後患者においても,. に有用かを明らかにすることとした。. これら補助具は術後の急性期から在宅生活まで幅広く使 用されている. 16‒18). 。TKA 後のクリニカルパスでは,. 術後 3 ∼ 7 日目までは歩行器,7 日目以降は杖を使用し ている. 16)17). 。加えて,TKA 後患者のうち,術後に歩. 対象と方法 1.対象 対象は,65 歳以上の高齢者 21 名とした。取り込み基. 行器・歩行車を日常的に使用する者が 5 ∼ 10%存在し,. 準として,日常生活を独歩で自立している者,過去 5 年. 疼痛の軽減や活動制限の解消を目的に処方されていると. 以内に腰部・下肢に整形外科疾患を発症していない・整. 18). 。したがって,これら補助具を使用. 形外科的手術歴がない者,歩行時に腰部,下肢に疼痛を. する目的の多くは,関節負担の軽減や移動の補助である. 有していない者,中枢神経疾患を有していない者とし. と予想する。他に本邦における介護保険での杖,歩行. た。除外基準として,計測して得られた KAM が平均値. 報告されている. 19). ,上述の整. の± 2SD 以上の者とし,上記の対象のうち,除外基準. 形外科疾患患者以外でも使用者は増えている。先行研究. に該当した 2 名を除き,19 名を計測対象とした(男性. の問題点として,杖類では異なる種類の杖を比較した報. 15 名,女性 4 名,年齢 71.6 ± 5.2 歳,身長 162.0 ± 9.1 cm,. 器・歩行車の貸与数は年々増加しており. 告や. 13). ,疾患者での計測. 10‒12). など様々な条件での検. 体重 60.7 ± 6.7 kg,利き足右 19 名) 。. 討がなされている。これらの報告から,杖類は,種類の. 倫理的配慮として,本研究は,国際医療福祉大学倫理. 違いによる関節モーメントの変化や膝 OA 患者など疾. 審査委員会の承認(承認番号 17-Io-143)を得て実施し. 患者における関節負担軽減の有用性が示唆されている。. た。また,ヘルシンキ宣言に基づき対象者に紙面と口頭. 杖の種類の違いによる変化は,lofstland-crutch や松葉. にて説明を行い,署名にて同意を得た。. 杖といった支持部がグリップ以外にもう 1 つ存在する杖 で,KAM を よ り 軽 減 で き る 可 能 性 が 示 唆 さ れ て い 13). 2.研究デザイン. 。これに対して,歩行器・歩行車は運動力学的研. 研究デザインは,65 歳以上の高齢者を対象とした複. 究が少なく,これらを同時に比較した報告はない。歩行. 数の歩行器・歩行車を使用した際の歩行分析を,三次元. 器・歩行車の先行研究では,KAM に関する報告はシル. 動作解析装置を用いて行う横断研究である。. る. バーカーのみであり. 13). ,その他の種類に関する報告は. ない。上述のように,歩行器・歩行車を関節負担軽減の. 3.計測方法. 目的で使用する者は一定数存在すると考える。しかし,. 使用機器は 10 台の赤外線カメラで構成する三次元動. これら補助具の関節負担軽減の有用性を示唆した報告は. 作解析装置(VICON 社製,VICON MX) ,床反力計 6. 少なく,種類の違いによる各種補助具の変化も明らかに. 枚(Kistler 社製 2 枚,AMTI 社製 4 枚)を使用し,サ. されていない。歩行器・歩行車はテクノエイド協会の分. ン プ リ ン グ 周 波 数 は カ メ ラ が 100 Hz, 床 反 力 計 を. 類によると,歩行器,歩行車,椅子付き歩行車,前腕支. 1,000 Hz とした。計測した座標データと床反力データを. 持台付き歩行車,シルバーカーに分けられている。これ. Visual 3D(C-motion 社製,version6)を用いて解析し. ら補助具は,種類によって形状が異なり,ハンドグリッ. た。座標データを 6 Hz,床反力データを 25 Hz のロー. プ(以下,グリップ)を手で把持するものや,前腕支持. パスフィルタによりフィルタリング処理を行った。関節. 台に前腕を載せて把持するもの,身体が補助具の支持基. 角度は,計測で得られた座標データからオイラー角を用. 底面内に位置するものや,支持基底面外のものがある。. いて算出した。関節モーメントの算出にはリンクセグメ. この形状の違いは歩行時の姿勢や関節モーメントに影響. ントモデルを使用した。関節モーメントの算出に必要な. を与える可能性がある。歩行器・歩行車使用時の姿勢に. 各体節の重心位置や身体質量比,慣性モーメントは先行. 関する先行研究では、高齢者において椅子付き歩行車の. 研究を参考に取得した. グリップの高さを変えた場合,グリップを高くすると歩. ターと座標データ,床反力データからニュートン・オイ. 20). ラー法による逆動力学的分析を行い,関節モーメントを. 関節モーメントに関する報告は上記の通りである。よっ. 算出した。赤外線反射マーカーを対象者の左右肩峰,上. て,歩行器・歩行車の種類の違いによる姿勢や関節モー. 腕骨内側・外側上顆,尺骨と橈骨の茎状突起,第 2・4. メントの変化を明らかにし,補助具の特徴を提示するこ. 中手骨頭,腸骨稜最上部,上前腸骨棘,上後腸骨棘,股. 行時の体幹前傾角度が減少したと述べられている. 。. 21)22). 。これらの身体パラメー.
(3) 452. 理学療法学 第 47 巻第 5 号. 図 1 マーカー貼付位置. 図 2 歩行路. 関節(大転子中央と上前腸骨棘を結ぶ線の大転子から. 上,頭部の前後方向位置が支持基底面から逸脱した場合. 1/3 の点) ,膝関節内側・外側(膝蓋骨の上端と下端を. は,逸脱しないように使用方法を指導した。利き足を計. 結んだ線の中点で膝蓋骨を除く前後径の中点),大. 測肢とした。. 側(股関節と膝関節外側を結ぶ線の中点),下. 外. 外側(膝. 関節外側と足関節外果を結ぶ線の中点),足関節外果と. 4.解析方法・統計学的処理. 内果,踵,第 1・5 中足骨頭,耳垂直上と,第 7 頸椎,. 解析項目は歩行速度とストライド長を含む時間距離因. 第 10 胸椎,第 5 腰椎,仙骨,胸骨柄,剣状突起,頭頂. 子に加え,体幹前傾角度,下肢三関節における前額面上. の計 49 ヵ所に貼付し標点とした(図 1)。. の関節角度と外部関節モーメント,床反力(鉛直方向成. 計測室内に約 10 m の直線歩行路を用意し,補助具が. 分と左右方向成分)とした。立脚期に着目し,立脚期時. 床反力計に接触しないようにするために,橋を架けるよ. 間を等分に分け,前半と後半の 2 相に分類し解析した。. うな形で板を設置した(図 2)。対象者は歩行速度を統. 立脚期は,床反力データを用いて利き足の踵接地からつ. 制するために臨床歩行分析研究会が推奨するメトロノー. ま先離地までと定義し,2 相それぞれの KAM の最大値. ムを使用して,歩行率 100 歩/分になるよう設定し歩行. を算出した。また,KAM が最大値を示したときの上記. 23). 。同一の対象者に対して独歩に加えて,車輪付き. 解析項目の値を算出し,条件間で比較した。さらに,独. 歩行器(イーストアイ社製,セーフティーアームウォー. 歩の KAM 最大値を 100%とし,各補助具の減少率も算. カー L タイプシリーズ) ,椅子付き歩行車(Invacare 社. 出した。統計処理は,統計ソフト IBM SPSS Statistics. 製,Dolomite opal 2000 4500 タイプ) ,前腕支持台付き. 23.0 を用い,一元配置分散分析の反復測定法を施行後. 歩行車(ウェルパートナーズ社製,ラビット WA-5)の. Bonferroni 法による多重比較検定を行った。有意水準は. 補助具を使用した歩行をそれぞれ 3 回ずつ計測した(図. 5% とした。. した. 3)。車輪付き歩行器と椅子付き歩行車のグリップの高さ は,先行研究を参考に被験者の静止立位時の橈骨茎状突 起レベルとし とした. 15). ,前腕支持台付き歩行車は肘頭レベル. 24). 。計測前に,グリップの持ち方と補助具に軽. く体重をかけるようにという指示をした。計測中に観察. 結 果 1.時間距離因子 歩行速度,ストライド長ともに各条件間で統計学的有 意差を認めなかった(表 1)。.
(4) 高齢者における歩行器・歩行車を使用した際の歩行分析. 車輪付き歩行器. 椅子付き歩行車. 453. 前腕支持台付き歩行車. 図 3 計測で使用した歩行器・歩行車. 表 1 各条件の時間距離因子 独歩. 車輪付き歩行器. 椅子付き歩行車. 前腕支持台付き歩行車. 歩行速度(m /s). 1.05 ± 0.12. 1.04 ± 0.09. 1.03 ± 0.10. 1.01 ± 0.12. ストライド長(m). 1.21 ± 0.13. 1.20 ± 0.13. 1.21 ± 0.12. 1.17 ± 0.15. ( )内は単位を示している.結果は平均値±標準偏差で表記.. 2.関節モーメント. (p<0.05) (表 2,図 4) 。. KAM 最大値と股関節内転モーメントは,立脚期の前 半,後半ともに補助具すべてで独歩と比較し有意に減少. 4.床反力. した(p<0.01)。さらに,KAM 最大値は,立脚期前半. 床反力鉛直方向成分は,立脚期の前半,後半ともに補. で椅子付き歩行車と前腕支持台付き歩行車が車輪付き歩. 助具すべてで独歩と比べて有意に減少し(p<0.01) ,前. 行器と比べて有意な減少を認めた(p<0.01)。KAM 最. 腕支持台付き歩行車は車輪付き歩行器,椅子付き歩行車. 大値の減少率は,立脚期前半において,椅子付き歩行車. と比較し有意に減少した(p<0.01)。床反力左右方向成. と前腕支持台付き歩行車が車輪付き歩行器と比較して有. 分は,立脚期前半において,補助具すべてで独歩と比較. 意に高くなっていた(p<0.05)。立脚期後半では,前腕. して有意に減少し(p<0.01) ,前腕支持台付き歩行車は. 支持台付き歩行車が車輪付き歩行器と比べ有意に高く. 車輪付き歩行器,椅子付き歩行車と比べ有意な減少を認. なった(p<0.05) (表 2,図 4)。. めた(p<0.05)。立脚期後半は,前腕支持台付き歩行車 が他の条件と比べ有意に減少していた(p<0.05)(表 2,. 3.関節角度 体幹前傾角度は,立脚期の前半,後半ともにすべての 補助具で独歩と比較して有意に増加し(p<0.01),椅子. 図 4)。 考 察. 付き歩行車は車輪付き歩行器と比べて,前腕支持台付き. 1.補助具使用による歩行速度の変化と床反力への影響. 歩行車は車輪付き歩行器,椅子付き歩行車と比較して有. 補助具使用時に歩行速度が変化したという報告が散見. 意に増加していた(p<0.01)。膝関節内反角度は,立脚. されるが. 期前半において,椅子付き歩行車と前腕支持台付き歩行. た(表 1) 。これはメトロノームの使用による歩行率の. 車が車輪付き歩行器と比較し有意に減少した(p<0.05)。. 統制がストライド長の統制に影響を与えたためと考え. 股関節内転角度は,立脚期前半で前腕支持台付き歩行車. る。したがって,歩行速度を一定にして検査・測定を実. が独歩,車輪付き歩行器と比べて有意な増加を認めた. 施する場合には,メトロノームの使用が有用である可能. 24). ,本研究では統計学的な有意差を認めなかっ.
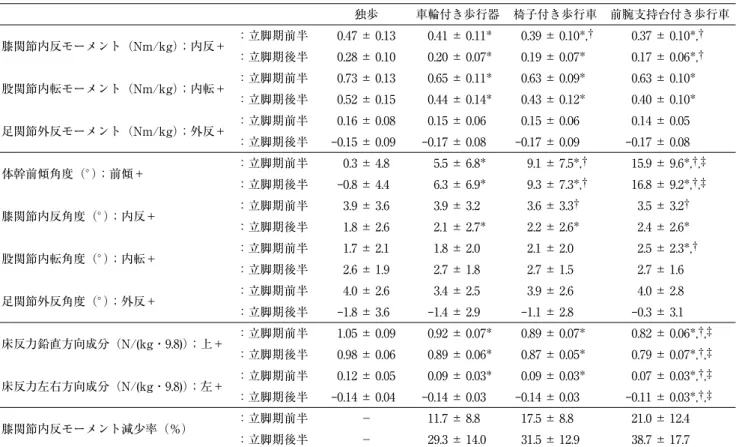
(5) 454. 理学療法学 第 47 巻第 5 号. 表 2 各条件の体幹前傾角度,下肢三関節の前額面上の関節モーメント,関節角度,床反力と膝関節内反 モーメントの減少率 独歩 膝関節内反モーメント(Nm/kg) ;内反+. 股関節内転モーメント(Nm/kg) ;内転+. 足関節外反モーメント(Nm/kg) ;外反+. 体幹前傾角度(° );前傾+. 膝関節内反角度(° );内反+. 股関節内転角度(° );内転+. 足関節外反角度(° );外反+. 床反力鉛直方向成分(N/(kg・9.8)) ;上+. 床反力左右方向成分(N/(kg・9.8)) ;左+. 膝関節内反モーメント減少率(%). 車輪付き歩行器. 椅子付き歩行車. 前腕支持台付き歩行車 0.37 ± 0.10*,†. :立脚期前半. 0.47 ± 0.13. 0.41 ± 0.11*. 0.39 ± 0.10*,†. :立脚期後半. 0.28 ± 0.10. 0.20 ± 0.07*. 0.19 ± 0.07*. 0.17 ± 0.06*,†. :立脚期前半. 0.73 ± 0.13. 0.65 ± 0.11*. 0.63 ± 0.09*. 0.63 ± 0.10*. 0.52 ± 0.15. 0.44 ± 0.14*. 0.43 ± 0.12*. 0.40 ± 0.10*. :立脚期後半 :立脚期前半. 0.16 ± 0.08. 0.15 ± 0.06. 0.15 ± 0.06. 0.14 ± 0.05. :立脚期後半. ‒0.15 ± 0.09. ‒0.17 ± 0.08. ‒0.17 ± 0.09. ‒0.17 ± 0.08. :立脚期前半. 0.3 ± 4.8. 5.5 ± 6.8*. 9.1 ± 7.5*,†. 15.9 ± 9.6*,†,‡. :立脚期後半. ‒0.8 ± 4.4. 6.3 ± 6.9*. 9.3 ± 7.3*,†. 16.8 ± 9.2*,†,‡. :立脚期前半. 3.9 ± 3.6. 3.9 ± 3.2. 3.6 ± 3.3†. 3.5 ± 3.2†. :立脚期後半. 1.8 ± 2.6. 2.1 ± 2.7*. 2.2 ± 2.6*. 2.4 ± 2.6*. :立脚期前半. 1.7 ± 2.1. 1.8 ± 2.0. 2.1 ± 2.0. 2.5 ± 2.3*,†. :立脚期後半. 2.6 ± 1.9. 2.7 ± 1.8. 2.7 ± 1.5. 2.7 ± 1.6. :立脚期前半. 4.0 ± 2.6. 3.4 ± 2.5. 3.9 ± 2.6. 4.0 ± 2.8. :立脚期後半. ‒1.8 ± 3.6. ‒1.4 ± 2.9. ‒1.1 ± 2.8. ‒0.3 ± 3.1. :立脚期前半. 1.05 ± 0.09. 0.92 ± 0.07*. 0.89 ± 0.07*. 0.82 ± 0.06*,†,‡. :立脚期後半. 0.98 ± 0.06. 0.89 ± 0.06*. 0.87 ± 0.05*. 0.79 ± 0.07*,†,‡. :立脚期前半. 0.12 ± 0.05. 0.09 ± 0.03*. 0.09 ± 0.03*. 0.07 ± 0.03*,†,‡. :立脚期後半. ‒0.14 ± 0.04. ‒0.14 ± 0.03. ‒0.14 ± 0.03. :立脚期前半. −. 11.7 ± 8.8. 17.5 ± 8.8. 21.0 ± 12.4. :立脚期後半. −. 29.3 ± 14.0. 31.5 ± 12.9. 38.7 ± 17.7. ‒0.11 ± 0.03*,†,‡. ( )内は単位を示している.結果は平均値±標準偏差で表記.膝関節内反モーメントの減少率は独歩の膝関節内反モーメントを 100%とした際の各種補助具の減少率を示している.* は独歩,† は車輪付き歩行器,‡ は椅子付き歩行車と比較して有意差を認めた 場合にそれぞれ使用.有意水準は 5%としている.. 図 4 立脚期中の膝関節角度・関節モーメント・床反力の変化(19 名の平均).
(6) 高齢者における歩行器・歩行車を使用した際の歩行分析. 455. 性が示唆された。また,歩行速度の変化は,床反力に影. 力学的変化を認め,立脚期前半,後半ともに補助具すべ. 響を与えるため,歩行速度に有意差がなかったことか. ての条件で独歩と比べ有意に減少していた(表 2)。そ. ら,各条件における床反力の差異は補助具使用による影. の要因として,KAM 最大値の減少理由と同様に床反力. 響と考えられる。. の減少が考えられる。また,前腕支持台付き歩行車は他 の補助具と比べて床反力が減少していたことから,股関. 2.各条件間の KAM の違いに対する運動学・運動力学 的分析. 節内転モーメントも同様に他の補助具より減少すると考 えられたが,統計学的に有意な差はみられなかった。こ. KAM 最大値は立脚期前半,後半ともにすべての補助. れは,前腕支持台付き歩行車では他の条件と比べ,股関. 具で独歩と比較して有意に減少し,加えて,立脚期前半. 節が内転位であったことが要因として考えられる。先行. では椅子付き歩行車と前腕支持台付き歩行車が車輪付き. 研究において,歩行時に股関節の内転角度が増加すると. 歩行器と比べ有意な減少を認めた(表 2)。補助具使用. 股関節内転モーメントは上昇していた. 時の KAM 最大値が独歩と比較し減少した要因は,床反. ら,股関節が内転位になったことで,床反力ベクトルの. 力が減少したためと考える。また,椅子付き歩行車と前. 作用線が股関節中心の遠くを通過し,レバーアームが延. 腕支持台付き歩行車を使用した際に車輪付き歩行器使用. 長する。これが股関節内転モーメントの増大に影響を及. 時と比較して KAM 最大値が減少した理由も,床反力の. ぼし,その両者が効果を相殺したため,有意な変化がみ. 影響と考察する。床反力の鉛直方向成分では,前腕支持. られなかったと推察した。しかし,本研究における股関. 台付き歩行車が車輪付き歩行器より有意な減少を認めて. 節内転角度の変化は膝関節内反角度と同様に 1 度未満で. いた。椅子付き歩行車も車輪付き歩行器と比較して統計. あった。したがって,レバーアームの変化は,股関節だ. 学的有意差は認めなかったが,減少する傾向にあった. けでなく他の下肢関節や体幹の角度変化が影響した可能. (表 2)。このことから床反力の減少に応じて KAM が減. 性がある。そのため,今後,他関節の関節角度も考慮し. 27). 。このことか. 少したと推察する。他に KAM に影響を与える要因とし. た検討を行っていく。. て膝関節内反角度が挙げられるが,本研究における影響. 上記の内容から,補助具使用時に KAM や股関節内転. は少ないと考える。通常歩行では,立脚期前半において. モーメントが減少したおもな要因は,床反力の減少によ. 25). 。こ. るものと考えられる。床反力は独歩と比較して補助具使. れは膝関節内反角度の増加に伴うレバーアームの延長が. 用時に有意に減少し,体幹前傾角度も補助具すべての条. 要因と考えられており,膝 OA 患者を対象とした歩行. 件で独歩と比較し有意に増加していた(表 2)。これら. 分析では,レバーアームの延長に伴う KAM の上昇が報. を踏まえると,補助具の使用は体幹を前傾させ,補助具. 膝関節内反角度の増加に伴い KAM は上昇する. 告されている. 12)25)26). 。表 2 より膝関節内反角度は椅子. への荷重量を増加させることで,補助具に加わる床反力. 付き歩行車と前腕支持台付き歩行車で車輪付き歩行器と. が増大し,下肢に加わる床反力が減少すると考察する。. 比べて有意に減少した。しかしながら,本研究での膝関. また,体幹前傾角度がもっとも増加した前腕支持台付き. 節内反角度の変化は 1 度未満であり,先行研究を踏まえ. 歩行車は,床反力においてももっとも有意に減少してい. 25). ,この変化がレバーアームに与える影響は少な. たことから,体幹前傾角度が大きくなるほど床反力が減. いと考える。これらのことより,椅子付き歩行車と前腕. 少する可能性が示唆された。しかし,先行研究から,歩. 支持台付き歩行車を使用した際の KAM が車輪付き歩行. 行時の股関節や膝関節の屈曲角度が,体幹前傾角度の増. 器使用時より減少した要因は床反力の影響が大きいと推. 加に伴い増大することが報告されている. 察する。. がって,本研究の補助具使用時においても,体幹の前傾. 上述の膝関節内反角度が椅子付き歩行車と前腕支持台. 角度の増加に伴い,姿勢変化による身体重心位置の変化. 付き歩行車で車輪付き歩行器と比べて減少した理由は,. に対応するために下肢の代償運動が現れ,股関節や膝関. 床反力の鉛直方向成分の減少によると考える。通常,立. 節の屈曲角度が変化する可能性がある。そのため,補助. 脚期前半において,膝関節内反角度は床反力鉛直方向成. 具を使用する場合,体幹が過度に前傾しないように補助. 分の上昇に伴い増加する。本研究では床反力の鉛直方向. 具の高さや持ち手の位置を調整することで,通常歩行に. 成分は前腕支持台付き歩行車が車輪付き歩行器と比較し. 近い形で歩行を行うことができ,適切な免荷も得られる. て有意に減少した。椅子付き歩行車も車輪付き歩行器と. のではないかと推察する。さらに,適切な免荷が得られ. ると. 28)29). 。した. 比較して統計学的有意差は認めなかったが,減少傾向に. ることで,床反力が減少し,KAM をはじめとする下肢. あった。このことから,これら補助具では床反力鉛直方. 関節モーメントの軽減も図れると考える。. 向成分の減少に伴い膝関節内反角度が小さくなったと推 察する。. 3.補助具の有用性の検討. KAM の他に,股関節内転モーメントにおいても運動. 立脚期前半の KAM 最大値の減少率は,独歩と比べて,.
(7) 456. 理学療法学 第 47 巻第 5 号. 車輪付き歩行器が約 12%,椅子付き歩行車が約 18%,前. いく。今後,本研究を疾患者へ臨床応用する際には,健. 腕支持台付き歩行車が約 21%減少した(表 2) 。Miyazaki. 常者と比較して特徴的な歩行パターンを示す膝 OA 患. らによると,膝 OA 患者の X 線上の進行予測において,. 者や TKA 患者. KAM の最大値の計測は有用であり,KAM の 1%の増加. 使用した歩行の運動学・運動力学的変化を検証する必要. で,膝 OA の進行のリスクが,約 6.5 倍に増加すること. がある。また,本研究では補助具への荷重量を規定して. 9). 12)30)31). などを対象に歩行器・歩行車を. が報告されている 。補助具使用による KAM 最大値の. いない。補助具への荷重量は身体にかかる床反力に大き. 減少率は約 15 ∼ 20%ときわめて高く,本研究で使用し. く影響を与えるため,歩行速度と同様に統制して計測を. た補助具はいずれも膝関節への力学的な関節負担を軽減. 行う必要があると考えられる。しかし,補助具への荷重. できる可能性が示唆された。. 量は対象者の疾患や身体機能などによって変化する可能. 各種補助具間での減少率を比較すると,前腕支持台付. 性がある。そのため本論文では,歩行速度を統制し,荷. き歩行車が他の補助具より大きくなっていた。前腕支持. 重量は規定せず計測を行った。また,歩行器や歩行車を. 台付き歩行車は,グリップの部分に前腕支持台があり,. 用いて歩行分析を行った報告はこれまでに存在せず,対. 上半身の体重を補助具にかけやすい構造となっている. 象者の無意識化における補助具への荷重量について明ら. (図 3)。このため,前腕支持台付き歩行車への荷重量が. かにすることができたという点では新規性のある研究と. 増大したことで,他の補助具より床反力が減少し,高い. いえる。一方で,杖を使用した歩行分析では,杖への荷. 減少率を示したと考える。. 重量を規定し計測したところ,荷重量の増加に伴い. 以上の点より,膝関節への力学的負担を軽減したい場. KAM の減少率も高くなったとの報告もある. 合,前腕支持台付き歩行車は他の補助具より軽減できる. がって,今後は荷重量を規定し,各種補助具の比較を行. 可能性が示唆された。しかし,本研究で使用した前腕支. い,検討する必要もあると考える。. 持台付き歩行車は,他の補助具と比較して大きく,重量 も重く設計されている。そのため,前腕支持台付き歩行. 10). 。した. 結 論. 車は,病院内や施設内などのような環境での使用に限定. 健常高齢者では,椅子付き歩行車と前腕支持台付き歩. されることが多い。一方で,前腕支持台付き歩行車と同. 行車を使用した歩行が独歩や車輪付き歩行器と比較して. 等の KAM 最大値を示した椅子付き歩行車は,小型で屋. KAM 最大値の有意な減少を示した。. 外への持ち運び可能な補助具であるため汎用性が高い。 これらを考慮すると椅子付き歩行車が KAM からみる膝 関節への力学的関節負担を軽減し,汎用性が高く有用な 補助具であると考えられる。 上述の歩行器・歩行車間の比較に加えて,先行研究で 多く行われている杖の KAM 減少率と比較した。片手で の杖使用時の KAM 減少率は約 10 ∼ 20%であり. 11‒13). ,. 本研究で使用した歩行器・歩行車の減少率も同程度で あった。よって,本研究で使用した歩行器・歩行車は, 杖と同等の KAM 減少効果を認めると考える。加えて, 片手で杖を使用した場合,KAM を軽減できるのは一側 下肢のみである。これに対して歩行器・歩行車は歩行 中,常に身体を支持できるため,両下肢に対して軽減す ることが可能である。そのため,歩行器・歩行車は,膝 OA 患者の中でも,両膝に OA を認める症例や,杖歩行 が困難な症例にとって有用である可能性が考えられる。 4.本研究の限界 本研究は,体幹や骨盤の矢状面上の関節角度に影響す る補助具の高さ. 20). を考慮していない。今後は,補助具. の高さの違いを含めた歩行器・歩行車を使用した歩行分 析を行い,関節負担の軽減に着目したより詳細な検証作 業が必要と考える。加えて,体幹の前傾角度に影響を受 ける可能性がある股関節や膝関節の屈曲角度も測定して. 利益相反 本研究に開示すべき利益相反はない。 文 献 1)谷本芳美,渡辺美鈴,他:日本人筋肉量の加齢による特徴. 日本老年医学会雑誌.2010; 47(1): 52‒57. 2)平澤有里,長谷川輝美,他:健常者の等尺性膝伸展筋力. 理学療法ジャーナル.2004; 38(4): 330‒333. 3)鈴木政登,清水桃子,他:健康女性の最大酸素摂取量,血 清脂質,体組成,骨密度の加齢変化および習慣的運動の影 響.体力科学.1996; 45(2): 329‒344. 4)Hudelmaier M, Glasere C, et al.: Age-related changes in the morphology and deformational behavior of knee joint cartilage. Arthritis & Rheumatism. 2001; 44(11): 2556‒2561. 5)山崎裕司,横山仁志,他:高齢患者の膝伸展筋力と歩行速 度,独歩自立との関連.総合リハ.1998; 26: 689‒692. 6)中村耕三:ロコモティブシンドロームの定義と概念.治療 学.2010; 44: 725‒731. 7)Yoshimura N, Muraki M, et al.: Prevalence of knee osteoarthritis, lumbar spondylosis, and osteoporosis in Japanese men and women: the research on osteoarthritis/ osteoporosis against disability study. J Bone Miner Metab. 2009; 27(5): 620‒628. 8)古賀良生:変形性膝関節症 病態と保存療法.南江堂,東 京,2008,pp. 2‒17. 9)Miyazaki T, Wada M, et al.: Dynamic load at baseline can predict radiographic disease progression in medial compartment knee osteoarthritis. Ann Rheum Dis. 2002; 61(7): 617‒622..
(8) 高齢者における歩行器・歩行車を使用した際の歩行分析 10)Simic M, Bennellet KL, et al.: Contralateral cane use and knee joint load in people with medial knee osteoarthritis: the effect of varying body weight support. Osteoarthritis Cartilage. 2011; 19(11): 1330‒1337. 11)Chan G, Smith A, et al.: Changes in knee moments with contralateral versus ipsilateral cane usage in females with knee osteoarthritis. Clin Biomech. 2005; 20(4): 396‒404. 12)Bechard J, Birmingham B, et al.: The effect of walking poles on the knee adduction moment in patients with varus gonarthrosis. Osteoarthritis Cartilage. 2012; 20(12): 1500‒1506. 13)伊藤将円,野村高弘,他:高齢者における歩行補助具使用 時の歩行分析:前額面における関節モーメントの比較.臨 床バイオメカニクス.2016; 37: 359‒363. 14)Edwards B: Contralateral and ipsilateral cane usage by patients with total knee or hip replacement. Arch Phys Med Rehabil. 1986; 67(10): 734‒740. 15)Alkjær T, Larsen P, et al.: Biomechanical analysis of rollator walking. Biomed Eng Online. 2006; 5(1): 2. 16)大谷 茂:人工膝関節置換術(TKA)のクリティカルパ スを実践して.臨床整形外科.2001; 36: 11‒20. 17)佐嶋義高,村井謙蔵,他:人工膝関節全置換術後早期理 学療法へのクリティカル・パス導入の試み.理学療法学. 2001; 28(1): 14‒19. 18)Singh JA, Lewallen DG: Dependence on Walking Aids and Patient-Reported Outcomes after Total Knee Arthroplasty. J Arthritis. 2015; 4: 149. 19)厚生労働省ホームページ 第 141 回社会保障審議会介護 給付費分科会 資料 1 福祉用具貸与.https://www.mhlw. go.jp/stf/shingi2/0000168709.html(2020 年 1 月 25 日引用) 20)Choi J, Ko Y, et al.: Effects of balance ability and handgrip height on kinematics of the gait, torso, and pelvis in elderly women using a four ̶ wheeled walker. Geriatr Gerontol Int. 2015; 15(2): 182‒188. 21)Winter DA: Biomechanics and Motor control of Human. 457. Movement 3rd ed. Wiley, Hoboken, NJ, 2004, pp. 261‒314. 22)Okada H, Ae M, et al.: Body segment inertia properties of Japanese elderly [in Japanese]. Biomechanisms. 1996; 13: 125‒139. 23)江原義弘,山本澄子:臨床歩行計測入門.医歯薬出版,東 京,2008,pp. 106‒110. 24)Fujita D, Kobara k, et al.: The influence of rollators with forearm support on walking speed, endurance and dynamic balance. Journal of Physical Therapy Science. 2012; 24(8): 667‒670. 25)Fantini Pagani CH, Hinrichs M, et al.: Kinetic and kinematic changes with the use of valgus knee brace and lateral wedge insoles in patients with medial knee osteoarthritis. J Orthop Res. 2012; 30(7): 1125‒1132. 26)Hunt A, Birmingham B, et al.: Associations among knee adduction moment, frontal plane ground reaction force, and lever arm during walking in patients with knee osteoarthritis. J Biomech. 2006; 39(12): 2213‒2220. 27)Houck R: Comparison of frontal plane trunk kinematics and hip and knee moments during anticipated and unanticipated walking and side step cutting tasks. Gait & posture. 2006; 24(3): 314‒322. 28)佐久間亨,阿江通良:体幹の前後傾が歩行動作に及ぼす影 響に関するバイオメカニクス的研究.バイオメカニズム学 会誌.2010; 34(4): 325‒332. 29)Saha D, Gard S, et al.: The effect of trunk flexion on ablebodied gait. Gait & posture. 2008; 27(4): 653‒660. 30)Chang H, Chmielet S, et al.: Varus thrust and knee frontal plane dynamic motion in persons with knee osteoarthritis. Osteoarthritis Cartilage. 2013; 21(11): 1668‒1673. 31)Debbi M, Bernfeld B, et al.: Frontal plane biomechanics of the operated and non-operated knees before and after unilateral total knee arthroplasty. Clin Biomech. 2015; 30(9): 889‒894..
(9) 458. 理学療法学 第 47 巻第 5 号. 〈Abstract〉. Gait Analysis in Healthy Elderly People with and without Walking Aids. Shomaru ITO, PT, MS Graduate School of International University of Health and Welfare International University of Health and Welfare Hospital Tatsuya IGAWA, PT, PhD, Tsuyoshi HARA, PT, PhD International University of Health and Welfare Hitoshi MARUYAMA, PT, PhD Graduate School of International University of Health and Welfare. Objective: The purpose of this study was to examine the joint kinematics and kinetics during walking with three types of walking aids in healthy elderly people. Methods: Nineteen healthy elderly people participated in this study. A three-dimensional motion capture system and force plates were used to obtain kinetic and kinematic data while walking on a level surface. All subjects walked without any aid and with walkers, rollators, and rollators with forearm support. We measured the peak values of lower extremity joint angles, moments, and ground reaction forces in healthy elderly people. Results: The peak values of knee adduction moment (KAM) while using the aids were smaller than without any aid. Furthermore, KAM was significantly lower when walking with rollators and rollators with forearm support compared to with walkers. Conclusion: The use of rollators and rollators with forearm support can help to reduce KAM during level walking in healthy elderly people. Key Words: Gait analysis, Joint moment, Walking aids, Elderly.
(10)
図
関連したドキュメント
少子高齢化,地球温暖化,医療技術の進歩,AI
⑹外国の⼤学その他の外国の学校(その教育研究活動等の総合的な状況について、当該外国の政府又は関
東北大学大学院医学系研究科の運動学分野門間陽樹講師、早稲田大学の川上
藤田 烈 1) ,坂木晴世 2) ,高野八百子 3) ,渡邉都喜子 4) ,黒須一見 5) ,清水潤三 6) , 佐和章弘 7) ,中村ゆかり 8) ,窪田志穂 9) ,佐々木顕子 10)
2.認定看護管理者教育課程サードレベル修了者以外の受験者について、看護系大学院の修士課程
It seems that the word “personality” includes both the universality of care and each care worker ’s originality with certain balance, and also shows there are unique relations
大曲 貴夫 国立国際医療研究センター病院 早川 佳代子 国立国際医療研究センター病院 松永 展明 国立国際医療研究センター病院 伊藤 雄介
区分 授業科目の名称 講義等の内容 備考.. 文 化
