はじめに
本稿では運動学習とニューロリハビリテーションについて 論じるが,まず用語の定義からはじめたい。運動学習とは, Schmidt に よ れ ば“a process of acquiring the capability for producing skilled actions”(Schmidt1), 1988, p. 346 in “Motor Control and Learning”)とされ,さらに“the changes, associated with practice and experiences, in internal process that determine a person’s capability for producing motor skill.” (Schmidt2), 1991, p. 51)となっている。さらに Guthrie3)は, “Relatively permanent change, resulting from practice or a novel experience, in the capability for responding”(Guthrie, 1952)と定義している。つまり,練習や経験によって習得さ れる能力であり,その変化が比較的永続することの 2 要素が 重要と考える。一方,ニューロリハビリテーション Neuro-rehabilitation に つ い て は, 明 確 な 定 義 が な い。 一 般 的 に は Neurologic rehabilitation,すなわち神経疾患のリハビリテー ションをさすことが多い。筆者としては,この分野を先端医療 として捉え,数多くの臨床家や研究者の参加を促したい思いか ら,2009(平成 21)年以来,以下のように定義している。す なわち「ニューロリハビリテーション Neuro-rehabilitation と は,ニューロサイエンスとその関連の研究によってあきらかに なった脳の理論等の知見を,リハビリテーション医療に応用し た概念,評価方法,治療法など」と定義している。いい換えれ ば,“Neuroscience-based rehabilitation”ということになる。 運動制御と運動学習 運動には筋力や体力など動力系(Power)の側面と,スキル や巧みさなどの制御系(Control)の側面がある。従来のリハ ビリテーション関連分野では動力系の研究が主であり,制御系 の研究は未開拓であった。その理由は,動力系の要素,たとえ ば筋力や体力は数値化しやすいのに対し,制御系については定 量化そのものが難しかったことや,制御の側面がほとんどブ ラックボックスであったことも一因として考えられる。しか し,古くから Bernstein4)が指摘した一連のベルンシュタイン 問題やその根底にある脳の仕組みの解明は,近年の計測技術を 含めた神経科学の進歩により急速に進んでいる。そして,運動 制御 Motor control や運動学習 Motor learning などの研究から 得られた知見を,リハビリテーション医学や運動療法に応用す ることが可能な時代が到来したと考えている。内科学におい て,まず生理学から学び病態生理学を理解するのと同じよう に,リハビリテーション医学では運動制御や運動学習などの基 礎を学び,運動障害の病態を理解したうえで,治療に役立てる のが正しい道だと考えている。 運動制御理論の対立と融合 基礎研究の分野では,1980 年代から随意運動制御につい ての研究がさかんになってきた。なかでも仮想軌道制御仮説 (Bizzi ら5))やλ モデル(Latash ら6))が世界的に有力な理 論として考えられていた。これらは,脳は複雑な軌道計算をす るのではなく,実際の軌道の鋳型のような軌道を規定している にすぎないという説(図 1)であり,基本的に脳は単純な計算 *
Motor Learning and Neuro-rehabilitation
**
兵庫医科大学リハビリテーション医学教室 (〒 663‒8501 西宮市武庫川町 1‒1)
Kazuhisa Domen, MD, Professor: Department of Rehabilitation Medicine, Hyogo College of Medicine
キーワード:運動学習,ニューロリハビリテーション,CI 療法 図 1 Bizzi の 仮 想 軌 道 制 御 仮 説(J Neurosci 4: 2738‒2744, 1984 を改変) A:肘を目標まで正確に屈曲する運動を学習した後の軌道. 上腕二頭筋には屈曲方向の運動に合せて筋電が出現.B:自 分の腕が見えない状態で同じ運動をさせている最中にモー ターで腕を強制的に目標位置まで動かし,モーターを切る. すると軌道は一旦本来の軌道に戻って,最終的には目標に到 達する.このことから,あたかも点線に示す仮想軌道が存在 し,脳はそれを鋳型のように運動指令として出力.途中で外 乱が入っても,仮想軌道の鋳型に引き寄せられるように腕は 追従するという仮説.これは,物理学的には高いスティフネ スを前提としているため,実際の運動中のスティフネスが低 ければこの説は成り立たないことになる.
しかしていないという立場である。この世界の流れに真っ向か ら挑んだのが,川人らの内部モデルによる制御理論(フィード バック誤差学習理論7))である。そして 1996 年 Science 誌に 歴史的な論文(Gomi & Kawato8))が発表され,仮想軌道制 御仮説が否定されるに至った。Kawato らは,脳が随意運動制 御で行っている計算は単純ではなく,小脳にある筋骨格系の内 部モデルを使ってフィードフォワード運動指令を計算している と主張した。筆者はまさにこの年に Latash 研究室と川人研究 室の両方に留学する機会を得,世界的な大論争を目のあたりに することになった。当時の紳士的かつ激しい論争は,強く印象 に残っている。 しかし,この論争は Osu らの研究9)により「止揚」される ことになる(図 2,3)。すなわち,運動学習の過程において関 節スティフネスは徐々に低下し,内部モデル的な制御が優位に なっていくが,関節スティフネスの変化は単調減少ではなく, 学習過程中の誤差が大きくなるとその 2 ∼ 3 試行後にはスティ フネスを上げて仮想軌道的制御を優先させることがわかった。 換言すれば,運動学習過程は長期的には内部モデル的な制御を めざしているが,短期的変動にたいする対応として,脳は必要 に応じて仮想軌道的な戦略を用いている。仮想軌道的なスティ フネスが高い状態での運動は,理想的なやわらかい運動とは離 れてしまうが,課題の難易度を下げ,誤差を減らすことに役 立っている。しかも脳は運動学習過程においてこれらの戦略を 無意識的に切り替えていることがわかった。 このように世界的に対立してきた理論も,新たな研究によっ てひとつの現象の別の側面を見ていたことがあきらかになるこ とがある。仮想軌道制御仮説と内部モデルによる制御のいずれ もが別々の側面では正しかったと理解することによって,臨床 の様々な現象が思い浮かぶようになった。たとえば,片麻痺の 運動学習の初期ではどうしても,いわゆる「筋緊張」が高く なってしまうが,それを単に避けるのではなく,脳が運動学習 を進めるための戦略と考えることはできないだろうか。もしう まく運動学習を誘導させることができれば,内部モデル的なや わらかなコントロールができるのではないだろうか。また,片 麻痺のように筋出力の低下,異常な共同運動,痙縮等によって, 運動指令と筋出力の入出力関係(すなわち内部モデル)が壊れ てしまった場合,内部モデルを再構築するような訓練が必要で はないだろうか。そのような考えから,ニューロリハビリテー ションの第一歩として,フィードフォワード運動訓練を考案し た。基礎理論からこのフィードフォワード運動訓練までの詳細 については,第 40 回日本理学療法士協会全国研修会における 特別講演『脳卒中リハビリテーションにおける運動療法の新た な挑戦』(2005(平成 17)年 10 月 8 日,名古屋)をまとめた 図 2 運動学習に伴うスティフネスの減少(J Neurophysiol 88: 991‒1004, 2002 を改変) A:運動学習とともに筋電から推定した肩関節のスティフネスの指標が低下する.各症例のデー タを正規化して回帰曲線とともに重ね書き.試行毎のばらつきが大きいものの,全体として減 少方向の傾向が見える.B:パフォーマンスエラーと肩関節のスティフネスとの相関関係.2 変数のデータを 1 試行ずつ前後にずらして相互相関係数を求めたところ,2 ∼ 3 試行ずれたと ころに有意な相関を認めた.この結果から,任意の試行におけるエラーが大小が,それに続く 2 ∼ 3 試行のスティフネスの大小と関連があるという結論になる.A のスティフネスの試行毎 のばらつきは,単なるノイズではなかったことがわかる. 図 3 運動学習過程におけるスティフネス,パフォーマンス エラー,および制御戦略の変化 運動学習過程において,全体としては,スティフネスの減少, パフォーマンスエラーの減少に向かう.その制御様式はス ティフネスが高い仮想軌道的な制御から内部モデル的な制御 に変わる.しかし,短期的にみると,ある試行においてエラー が増加すると,その 2 ∼ 3 試行後のスティフネスを即時的に 上げることで,難易度を下げ,エラーを減少させる.エラー が減少すると,スティフネスが下がる,というように,必要 に応じて運動制御の戦略を変化させていると考えられる.
総説(理学療法学)10)に詳しいので参照されたい。 予備的検討を行った結果,フィードフォワード運動訓練は慢 性期の脳卒中患者でも運動学習が可能であることを示した。し かしそこに大きな問題があった。それは機器のうえでの課題は 上達するが,ADL には汎化しない,ということである。水平 面の機械のうえでは目に見えて改善しても,三次元空間で物 品を操作するような通常の ADL に対する改善効果は見られな かった。これは患者自身からみた QOL の向上をめざすべきリ ハビリ医療としては大きな壁に思えた。そしてこの結果を米国 の Society for Neuroscinece で発表11)しているとき,ひとり の世界的研究者が筆者のポスターに目をとめてくれた。彼曰く 「これはまさに麻痺側上肢の強制使用による改善ではないか」
と。それが,CI 療法の創始者のひとりである Steven L Wolf であった。これがきっかけとなって,数年後から筆者らが日本 において CI 療法を導入することになった。
CI 療 法(Constraint-induced movement thera-py)の概要
多くのニューロリハビリテーションが脚光を浴びている中 で,Evidence based medicine として確立した代表的な治療法 が CI 療法(Taub, Wolf12)13))である。CI 療法は,脳卒中な どによる片麻痺の非麻痺側を拘束し,段階的な難易度で調整さ れた訓練課題(Shaping 課題)を集中的に行うことにより,麻 痺側の随意運動を誘発し,改善に導く治療法である。筆者ら は Wolf 自身の勧め以来,日本への体系的な導入を検討してき たが,2002(平成 14)年から予備的検討を行い,2003(平成 15)年から本格的に臨床の現場に導入してきた14)。具体的に は,午前 2 時間,午後 3 時間の訓練時間を確保し,全体の 40% を作業療法士がマンツーマンで実施し,残り 60%は自主訓練 とした15)。これを週に 5 日間,2 週間にわたって合計 10 日間 の療法を行うこととした。CI 療法前後に WMFT(Wolf Motor Function Test) や MAL(Motor Activity Log) な ど 詳 細 な outcome measure を記録するため,全体で 3 週間弱の入院で 行 っ た。 な お,WMFT と MAL は, 高 橋 ら が 公 式 の 日 本 語 版16)17)を発表しているので参考にされたい。具体的な訓練課 題のポイントは,徐々に難易度を上げていって学習効果を積み 重ねていく“Shaping”という課題である。文献上の Shaping 課題は限られた項目しかなかったため,佐野らは粗大動作,複 雑動作,両手動作からなる合計約 60 項目の“Shaping”を作 成した17)(表 1)。CI 療法の適応基準については,母指を含む 3 指が 10 度以上随意的に伸展でき,手関節が 20 度以上随意的 に伸展できることである。しかし,これは確実に EBM として の科学的なデータを得るための基準であって,CI 療法のコン セプト自体を維持すれば,より重度の例や時間の短縮などは柔 軟に対応しても効果はあると考えている。なお,現在兵庫医科 大学病院では外来で実施し,連続 2 週間の通院ができない例で は分院であるささやま医療センターや近隣の関西リハビリテー ション病院等に入院して実施している。 3 つの運動学習則 CI 療法は運動学習理論から直接発展した治療ではないが, 運動学習とニューロリハビリテーションの関わりを考察する中 で,CI 療法が「運動学習療法」とも呼べる治療法であること がわかってきた。 脳科学,特に計算論的神経科学の分野で提唱されている運動 学習則として 3 つの学習則が知られている。すなわち「内部モ デルによる教師あり学習」「強化学習」「教師なし学習」であ る19)。「内部モデルによる教師あり学習」とは,川人らのフィー ドバック誤差学習7)(図 4)に代表される運動制御と運動学習 の理論であり,おもに運動時間が短い素早い熟練した運動の制 御・学習の理論である。ここで教師にあたるのは,下オリーブ 核から登上線維を経てプルキンエ細胞に伝えられる誤差信号で ある。フィードバックだけで制御しようとする古い考え方があ るが,これはゆっくりした運動の制御しか説明できず,ある程 度以上速い運動の制御は理論的に不可能である。なぜなら,体 性感覚や視覚によるフィードバックを最大限効果的に使ったと しても,神経系がそれを脳に伝えるには,どうしても約 50 ∼ 100 mse の時間遅れ(feedback delay)が生じてしまう。した がって,フィードバック誤差学習モデルでは,いったんはじ まった運動をリアルタイムに調整するのではなく,運動中から 運動直後までの誤差情報を教師信号として,小脳の可塑性を利 用して内部モデルの修正を行う。つまり,フィードバックされ 机上のボールをつかみ,患側横の箱に入 れる 机上と机縁をタオルで拭く ブロックを 2 つ以上積み上げる 紙を手前から 2 つに折る など そろばんをはじく ティッシュでこよりを作る 書字 など
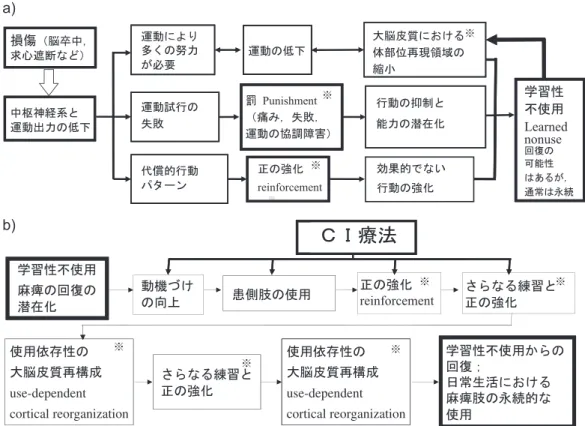
た誤差情報はそのときの運動ではなく,次の運動に生かされる というわけである。そして学習を繰り返すことによって,正確 な内部モデルが構築され,誤差が減少する。 さて,ある程度速く,正確さが求められる熟練した運動は上 記の教師あり学習によって説明できる。しかし,人間の動作は 正確さを要求されるすばやい運動ばかりではない。たとえば, 立ち上がりや車椅子からベッドの移乗など複合的な運動では, スピードもさほど速くない運動が多い。このような運動の学習 には,動作の正確さより適切さを重視する運動学習則である 「強化学習」の方が適している。 強化学習でもっとも重要な要素は,一連の運動の軌道が正確 であることではなく,最終的な結果が適切であったか,という ことである。結果が適切であったかどうかを,動作する本人か ら見ると,運動の結果として報酬が得られたか,ということに なる。このように報酬によって学習する仕組みを強化学習とい う。強化学習そのものの理論を裏づける有名な研究が Schulz らの報告である(図 5)。この理論では,当然報酬が重要では あるが,もっとも重要な変数は,報酬の大きさそのものではな く,報酬予測誤差である。 3 つ目の学習則である「教師なし学習」は次のように理解す るとわかりやすい。たとえば昆虫を分類する際に,図鑑を見な がら一つひとつ種類を確定させたとする。これは図鑑という教 師があるので教師あり学習ということになる。一方,図鑑がな くても,虫の形,体節,足,羽など様々な特徴から分類するこ とができる。これが教師なし学習である。ここでは類似性や頻 度などがかかわってくるが,統計的には主成分分析的な手法で あり,似た者同士を分類するのでクラスタリングともいわれて いる。理論的には自己組織化マップのアルゴリズムがもっとも 適している。自己組織化マップを利用すると,いくつかの前提 によって使用依存性脳可塑性をシミュレーションできることが わかっている。さらに,損傷脳において CI 療法(的な集中訓練) によって可塑性が引きだされることを示した有名な Nudo の実 験を,自己組織化マップのアルゴリズムでシミュレーションで きることが示されている20)。 運動学習則から見た CI 療法 従来から CI 療法による回復のメカニズムとして学習性不使 用(Learned non-use)の克服と使用依存性の脳可塑性(use-dependent plasticity)が指摘されていた(図 6)。この理論は CI 療法のメカニズムをよく説明するものであるが,前述した 3 つの運動学習則から考察するとさらに興味深い。 図 6 に※印で示すように学習性不使用では,強化学習が麻痺 側上肢による運動を低下させるようにマイナスにはたらいてい ることがわかる。また,麻痺側上肢を使用しないことによって, その皮質領域が減少することは,使用依存性可塑性(教師なし 学習)のマイナスの側面が現れている。そして,CI 療法によっ て,これらの悪循環に打ち勝ち,機能改善する過程には,強化 学習や使用依存性可塑性(教師なし学習)がプラス方向に使わ れていることがわかる。 これらの中に教師あり学習が含まれていないように見えるが, 教師あり学習はある程度熟練した運動を多数回繰り返すことに よって正確な内部モデルを構築する学習則であるので,CI 療法 のあらゆる場面の要素的動作で利用されていると考えられる。 以下に CI 療法を多数例に対して実践する中で考察したコツ について述べ,運動学習との関連について考察したい。 CI 療法は単純動作のスパルタ式訓練ではなく,運動学習が 進むように,きめ細かな訓練課題の調整を行うきわめて丁寧な 図 4 川人のフィードバック誤差学習モデル 図 5 ドーパミン細胞の報酬予測応答(Schultz et al. 1993) ド ー パ ミ ン 細 胞 の 活 動 は, 実 際 の 報 酬 と 報 酬 予 測 と の 差 (Reward prediction error)を表現している.(報酬 r −予測 V)
治療法である。容易な単純動作をいくら繰り返してもけっして 運動学習につながらない。その臨床で重要な点は,
1)非麻痺側の拘束(restraint)
2)多様性と繰り返し(massed principle)
3)難易度調整と達成感(gradual rebuilding and attainment) 4)課題指向的アプローチ(task-oriented approach) 5)Transfer package などである。それぞれのポイントを 3 つの運動学習則の概念で 考察してみる。 1)の非麻痺側の拘束と 2)の多様性と繰り返しとは,麻痺 側に集中的に様々な動作を繰り返すことであり,非麻痺側を拘 束するのは非麻痺側による代償動作を防ぐ目的がある。逆にい えば,代償動作がでないように設定したり,非麻痺側を使わな いという意識づけが十分にできている場合には,拘束は不要と いうことになる。また,教師あり学習において,内部モデルは 一つひとつの運動に対応して構築されることといわれている。 つまり,ある運動の内部モデルが構築され運動が上達した場 合,それに近い運動に対しては学習の効果が汎化するものの, 軌道やスピード等が異なればそれは別の運動であるから汎化し にくいといわれている。したがって,多様な運動をすることで, それぞれの運動に対応した多様な内部モデルを構築する必要が ある。そして内部モデルを完成させるためには,相当数の繰り 返しが必要になってくる。 また,治療期間を通して「教師なし学習」が関与すること で,より多く実行した運動がより学習されていく過程は,use-dependent plasticity と関連づけられる。 3)の難易度調整と達成感は,まさに強化学習そのものといえ る。すなわち,めったに成功しないような難易度が高過ぎると 達成感は得られず,簡単すぎる課題でも同様に運動学習が進ま ない。動作全体の「難易度」を計算論的に定義することは難し いが,直感的理解として筆者らは 60 ∼ 70 点くらいの課題にな るように難易度を調整するように勧めている。治療による改善 とともに,当然点数が上がってくるが,改善に合せて徐々に難 易度を上げていくようなきめの細かな調整が必要になる。そし て,ある課題を行った後に期待した以上の成果が得られたとき, 強化学習の法則によって運動学習が適切な方向に進むであろう。 また別の概念として,強化学習では報酬を最大にする行動を見 つけるための「探索 explore」が重要といわれている。すなわち, 目の前の手堅い報酬を得ようとする行動ばかりでは,本当に高 い報酬が得られる選択肢を発見することはできない。療法の場 面に置き換えると,療法士からみて「正解」と思われる運動を 逐一指示したり,患者ができないからと徒手介助するような方 法ではなく,課題遂行の方向性を指示した後は,患者自身が最 適な運動戦略を探索により発見するように指導する。その方が 本当に適切な運動を学習することが少なくないと考えている。 4)の課題指向的アプローチ(task-oriented approach)で重 要なことは,課題として行う動作に患者自身が「意味」をもた せることができること,つまり,できるだけ患者が理解しやす い課題,さらにいえば,患者が実現したいと希望する ADL に 近いほどよい。課題指向的アプローチでは,要素的な関節角度 などは問題ではなく,要素的な関節の動きなどは目指す運動と かけ離れていても,結果として課題を達成することに重点がお かれる。これも,動作の正確さよりも結果としての適切さが重 視される「強化学習」に通じる考え方である。
図 6 a)learned non-use と b)CI 療法のメカニズム(Taub ら 14)を改変)
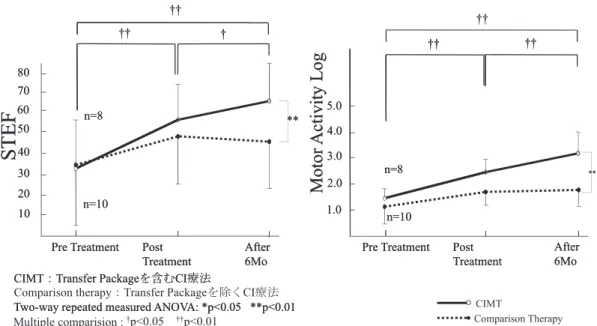
以上のように CI 療法自体は運動学習理論を直接運動療法に 応用したものではないが,その効果のメカニズムは 3 つの運動 学習則でうまく説明することができる。 5)の Transfer package(日常生活において麻痺側上肢の使 用を促進する行動戦略)の重要性が話題になっており,最近 の CI 療法では必須のコンセプトになっている。Takebayashi ら21)の 報 告( 図 7) で も Transfer package 有 り の 群 で は, CI 療法前後の治療効果に差がでるだけでなく,CI 療法をや めた後も長期的に改善傾向が続くことがわかっている。これ は,CI 療法中の強化学習などが長期的に維持されるともいえ るが,筆者らは,Transfer package には,各学習則をどのよ うに利用すれば効果的な学習ができるか,すなわち,学習方法 そのものを学習する「メタ学習」の役割があると予想している。 Transfer package を実施した例では,CI 療法終了後も様々な ADL に挑戦し,うまくいかないときの解決法を身につけてい るため,自ら学習し改善することができる。
今後の展望
CI 療法の発展として,CI 療法の適応外の重度例に対する 治 療22)や CI 療 法 の 1 日 あ た り の 時 間 を 減 ら し た modifi ed CIMT23),distributed CIMT24)など様々な変法が生まれて盛 んに議論されている。 現在筆者らが取り組んでいる CI 療法の一連の研究の中で, CI 療法後の治療効果を MRI の拡散テンソル画像から予測する ことに成功した(図 8)25)。拡散テンソル画像から内包後脚に おける FA 値の患側/健側(rFA 値)を求め,rFA 値と上肢 機能のスコア(Fugl-Meyer Assessment)との相関を検討した。 その結果,CI 療法前には相関が見られなかったが,CI 療法後 には個々の症例の機能が改善し,CI 療法後の機能は rFA 値と はっきりとした相関を示すようになった。この研究は示唆に飛 んでいる。第 1 に,CI 療法前の機能と CI 療法後の回帰直線と の差が,その症例の学習性不使用の状況を示しており,治療前 に相関が低いのは,患者によって学習性不使用の状況が一定で ないことを反映している。第 2 に,rFA 値とこの回帰直線を 知っていれば,CI 療法前の症例にどの程度の学習性不使用が 存在し,かつ,どの程度までの改善が見こめるかを予測するこ とができる。 一方,CI 療法の上肢麻痺以外への応用の中で,失語症に応 用 す る CIAT(Constraint-induced aphasia therapy)26)が 注 目されている。この治療では,ジェスチャーなど代償的な手段 に頼ることを禁止し,言語の表出のみに「拘束」した状態で絵 カード等の意味を相手に伝える言語ゲームを集中的に行う。合 計 10 日間にわたって 30 時間以上の治療をする方法などが報告 されている。治療対象とする障害はまったく異なるように見え るが,代償を減らし機能障害そのものの改善をめざすという意 味では,本質的に CI 療法と同じである。筆者には経験がない
図 7 Transfer Package の有無による長期効果の違い(Takebayashi T et al. Clin Rehabil 2012)
図 8 CI 療法前後の Fugl-Meyer と rFA との相関関係と回帰
直線(Marumoto K et al. Restor Neurol Neurosci. 2013 May 6.)
PLIC(rFA)と CI 療法前の FMA は相関を認めず.CI 療法 後は全例改善し,PLIC(rFA)と FMA は強い正の相関を認 めた.CI 療法後の FMA と PLIC(rFA)の関係を潜在的機能 直線と考えると,その直線から予測される機能と実際の CI 療法前の機能との差が learned non-use を表している可能性 がある.
が,通常の CI 療法の原則から考察すると,患者自身がモチベー ションを保ち続けるような難易度設定がポイントではないかと 考えている。言語課題での難易度設定は,動作課題の場合より さらに難しいと思われるが,エビデンスとなっているデータを 見る限り有望な治療法になる可能性がある。 他のニューロリハビリテーションとして,経頭蓋磁気刺激, 随意運動介助型電気刺激(HANDS 療法),ロボット治療,ボ ツリヌス療法などが注目されている。 筆者らもロボット治療は手指の機能が適応を満たさない比較 的重度の症例の治療に,肩肘に対する CI 療法のような位置づ けで実施している。現在取り組んでいる ReoGo27)という上肢 ロボットは,CI 療法における Shaping のように多様な運動を 多段階の難易度で設定できる点が,他のロボットと異なって RCT でも有意差を示している理由であると考えている。 ボツリヌス治療は一見 CI 療法の適応がない手指の集団屈曲 のみの患者に実施すると,伸展運動が出現することがあり,CI 療法の適応拡大につながると期待している。また,手指の伸展 が不十分で CI 療法の課題を実施しにくいような例でも,前もっ てボツリヌス治療を実施することにより効果的な治療が行える 場合がある。さらに,通常の CI 療法が終了した患者で,2 度 目の CI 療法をボツリヌス療法と併用することによって治療効 果が得られた例を報告した28)。 CI 療法の適応外であるが,手指の伸展の筋電が出現してい る患者では,HANDS 療法が適応になる。HANDS 療法によっ て,実際に手関節や手指の伸展の動きが出現するようになれ ば,CI 療法の適応という流れ(図 9)ができる。 その他,経頭蓋磁気刺激 rTMS や直流刺激 tDCS については, 単独での治療効果をめざすより,CI 療法あるいは運動学習則 に基づいた運動療法を併用して高い治療効果をめざした方が患 者にとってもメリットが大きい。経頭蓋磁気刺激などは脳の可 塑性を生じやすい状態をつくる Preconditioning の役割がある と考えられる。そのうえで運動学習をもたらす運動療法を実施 することが,真の回復につながる。これらの治療全体の考え方 は図 9 のように,Preconditioning 的な治療,運動に関わる神 経筋骨格の各要素を改善させる治療,運動学習を補助する治療 などに分けられる。しかし,もっとも全体を包括し重視すべき 治療は,運動学習そのものを促進する治療ではないかと考えて いる。つまりは,運動学習を促進する運動療法である。CI 療 法がその代表であるが,もちろん他を排除するものではない。 リハビリテーションの分野の研究であるにもかかわらず,運動 療法をしないで電気や磁気刺激だけをして効果を検討している 報告も散見するが,運動療法にこだわらなければ,運動療法の 図 9 Neuro-Rehabilitation の考え方 rTMS,tDCS など様々な治療は,運動学習そのものではないので,運動学習の準備 を整える Preconditioning の役割があると捉える.その状態で,手指の随意的な伸 展が可能であれば,積極的に CI 療法など運動学習を促進する運動療法を実施できる. 伸展が不能で筋電ででていれば HANDS 療法が可能であり,筋電もでていなければ, BMI の適応となる.装具やロボットなどは運動療法をサポートする役割がある. 図 10 先端ニューロリハビリテーションへの期待 回復曲線そのものを変えることがリハビリ医学の使命ではなかったか? 3ヵ月 6ヵ月
将来はない。運動学習を促進する運動療法は今後も理学療法学 の中心的なテーマではないかと考える。 さらに誤解を防ぐために追記する。筆者らは臨床において適 切なゴール設定をするためには予後予測が重要であると主張し ている。しかし,このことは予後予測どおりに回復するのだか ら,自然に任せるという意味とは大きく異なる。いくつかの方 法で予後が予測された場合,それをゴールとして検討しながら も,予測よりも常に高いアウトカムをめざすように努力するこ とがリハビリテーション専門家の使命であると考えている。さ らに,回復曲線そのものをあらゆる方法で上向きにシフトさせ るような先端的リハビリテーション治療の開発も我々に課せら れた使命であると考えている(図 10)。 近年の基礎科学の発展は著しく,運動制御,運動学習,バ イオメカニクス,心理学,脳科学様々な基礎分野は長足の進 歩を遂げ続けている。筆者はそのような分野に携わる基礎研 究者達と議論する機会が多いが,彼らが求めていることは脳の 基礎科学を社会に役立てることである。すなわちリハビリテー ションへの応用を心から望んでいる。そのような状況から筆 者は 2010(平成 22)年に Japan Society for Motor Controland Neuro-rehabilitation(JSMC & NR) を 設 立 し た。 世 界 的 な 学会として ISMC:International Society of Motor Control が Latash を中心に設立され,2 年に 1 度奇数年に開催されている ため,JSMC & NR は ISMC が開かれない偶数年に実施してい る。医療系だけではなく,工学,心理学,体育学,人類学など, 普段議論する機会のない研究者達と熱心に議論することができ る。分野は違っていても動作解析等によって脳の仕組みを知ろ うとする大筋は皆同じ志であり,議論も噛み合うところが大変 刺激的である。2013(平成 25)年はモントリオールで ISMC が開催されたので,JSMC は 2014(平成 26)年東京での開催 を予定している。 最後に,近年再生医療が注目されているが,神経細胞が 100%再生できたとしたら,リハビリテーションは要らなくな るのだろうか? 筆者はそのようなことは絶対ないと断言でき る。なぜならば,神経系はネットワークで繋がってこそ機能す るのであり,適切に繋げるための努力をしなければ機能的改善 はないからである。この神経ネットワークを繋げる治療,これ が運動療法なのである。したがって,再生医療実用化する将来 には運動学習を効率的に進める運動療法やニューロリハビリ テーションが最重要になると筆者は考えている。そのために も,ニューロリハビリテーションの分野の研究を今から強力に 推進しなければならない。 文 献
1) Schmidt RA: Motor Control and Learning: A Behavioral Emphasis. 2nd ed, Human Kinetics, Champaign, IL, 1988. 2) Schmidt RA: Motor learning principles for physical therapy. In:
Foundation for Physical Therapy. Contemporary Management of Motor Control Problems: Proceedings of the II-STEP Conference. Foundation for Physical Therapy, Alexandria, VA, 1991.
3) Guthrie ER: The psychology of learning. Harper & Row, New York, 1952.
4) Bernstein NA: The co-ordination and regulation of movements. Pergamon Press, New York, 1967.
5) Bizzi E, Accornero N, et al.: Posture control and trajectory
formation during arm movement. J Neuroscience. 1984; 4: 2738‒ 2744.
6) Latash ML: Control of Human Movement. Human Kinetics Publ. 1993.
7) Kawato M, Furukawa K, et al.: A hierarchical network model for motor control and learning of voluntary movement. Biol Cybern. 1987; 57: 169‒185.
8) Gomi H, Kawato M: Equilibrium-point control hypothesis examined by measured arm-stiffness during multi-joint movement. Science. 1996; 272: 117‒120.
9) Osu R, Franklin DW, et al.: Short- and long-term changes in joint co-contraction associated with motor learning as revealed from surface EMG. J Neurophysiol. 2002; 88: 991‒1004.
10) 道免和久:特別講演 脳卒中リハビリテーションにおける運動療 法の新たなる挑戦.理学療法学.2006; 33(4): 147‒154.
11) Domen K, Osu R, et al.: Evaluation of motor function using optimal performance indices for trajectory planning in hemiparesis patients. 28th Annual Meeting Society For Neuroscience, Los Angels, 1998.
12) Wolf SL, Lecraw DE, et al.: Forced use of hemiplegic upper extremities to reverse the eff ect of learned nonuse among chronic stroke and head-injured patients. Exp Neurol. 1989; 104: 125‒132. 13) Taub E, Miller NE, et al.: Technique to improve chronic motor
defi cit after stroke. Arch Phys Med Rehabil. 1993; 74: 347‒354. 14) 道免和久(編):CI 療法―脳卒中リハビリテーションの新たなアプ
ローチ,中山書店,東京,2008.
15) 高橋香代子,道免和久,他:新しい上肢運動機能評価法・日本語 版 Wolf Motor Function Test の信頼性と妥当性.総合リハビリテー ション.2008; 36: 797‒803.
16) 高橋香代子,道免和久,他:新しい上肢運動機能評価法・日本後 版 Motor Activity Log の信頼性と妥当性の検討.作業療法.2009; 28: 628‒636.
17) 佐野恭子,道免和久:Constraint-induced movement therapy(CI 療法)─当院での実践.OT ジャーナル.2007; 40: 979‒984. 18) 佐野恭子,道免和久:脳卒中患者の麻痺側上肢に対する集中訓練
プログラム(CI 療法)の実際.理学療法.2007; 24(12): 1541‒1547. 19) Doya K: What are the computations of the cerebellum, the basal
ganglia, and the cerebral cortex. Neural Networks. 1999; 12: 961‒974. 20) Aflalo TN, Graziano MSA: Possible origins of the complex
topographic organization of motor cortex: reduction of a multidimensional space onto a two-dimensional array. J Neurosci. 2006; 26: 6288‒6297.
21) Takebayashi T, Koyama T, et al.: A 6-month follow-up after constraint-induced movement therapy with and without transfer package for patients with hemiparesis after stroke: a pilot quasi-randomized controlled trial. Clin Rehabil. 2013; 27(5): 418‒426. doi: 10.1177/0269215512460779. Epub 2012 Oct 4.
22) Bonifer NM, Anderson KM, et al.: Constraint-induced movement therapy after stroke: efficacy for patients with minimal upper-extremity motor ability. Arch Phys Med Rehabil. 2005; 86(9): 1867‒1873.
23) Page SJ, Levine P: Modified constraint-induced therapy in patients with chronic stroke exhibiting minimal movement ability in the aff ected arm. Phys Ther. 2007; 87(7): 872‒878. Epub 2007 May 1.
24) Dettmers C, Teske U, et al.: Distributed form of constraint-induced movement therapy improves functional outcome and quality of life after stroke. Arch of Phys Med and Rehabil. 2005; 86(2): 204‒209.
25) Marumoto K, Koyama T, et al.: Diff usion tensor imaging predicts the outcome of constraint-induced movement therapy in chronic infarction patients with hemiplegia: A pilot study. Restor Neurol Neurosci. 2013; 31(4): 387‒396. doi: 10.3233/RNN-120285.
26) Pulvermüller, F, Neininger B, et al.: Constraint-induced therapy of chronic aphasia following stroke. Stroke. 2001; 32: 1621‒1626. 27) Bovolenta F, Sale P, et al.: Robot-aided therapy for upper limbs
in patients with stroke-related lesions. Brief report of a clinical experience. J Neuroeng Rehabil. 2011; 8: 18. Published online 2011 April 9. doi: 10.1186/1743-0003-8-18.
28) 花田恵介,竹林 崇,他:A 型ボツリヌス製剤を投与後に CI 療法 を実施した一症例.作業療法ジャーナル.2012; 46(1): 93‒97.