作物圃場における栽培管理支援に向けたUAVリモー
トセンシングに係わる研究
著者
橋本 直之
学位授与機関
Tohoku University
学位授与番号
11301甲第19315号
URL
http://hdl.handle.net/10097/00127860
作物圃場における栽培管理支援に向けた
UAV リモートセンシングに係わる研究
目次
本論文における用語の説明 1 序論... 11 1.1 背景...11 1.2 目的...12 1.3 想定される課題...14 1.4 本論文の構成...14 2 水稲圃場における UAV モニタリングのための群落反射率及び植生指数のシミュレー ション...17 2.1 緒言...17 2.2 材料と方法...18 2.3 結果...24 2.4 考察...30 2.5 結論...31 3 水稲圃場における UAV 観測時の日射条件を考慮した機械学習による LAI 推定手法の 検討...33 3.1 緒言...33 3.2 材料と方法...34 3.3 結果...42 3.4 考察...44 3.5 結論...46 4 水稲圃場における追肥効果の UAV モニタリング... 47 4.1 緒言...47 4.2 材料と方法...48 4.3 結果...545 作物圃場における UAV リモートセンシングの利活用...63 5.1 緒言...63 5.2 材料と方法...63 5.3 結果...66 5.4 考察...68 5.5 結論...69 6 総括...71 6.1 結論...71 6.2 今後の課題...72 参考文献 謝辞
本 論 文 に お け る 用 語 の 説 明
区 分 用 語 説 明 あ 赤 色 波 長 帯 電 磁 波 の 可 視 光 域 の う ち , 赤 色 に 相 当 す る 波 長 域 . お オ ル ソ 補 正 人 工 衛 星 や 航 空 機 な ど か ら 地 表 を 撮 影 し た 空 撮 画 像 を ,真 上 か ら 見 た よ う に 地 物 が 正 し い 位 置 関 係 に な る よ う に 歪 み を 補 正 す る 処 理 . オ ル ソ モ ザ イ ク 複 数 の 空 撮 画 像 を 合 成 し ,オ ル ソ 補 正 す る 処 理 .多 く の 場 合 ,撮 影 し た い エ リ ア が カ メ ラ や セ ン サ の 仕 様 上 1 回 の 画 像 に 収 ま ら な い よ う な 場 合 に ,重 複 領 域 を 持 つ よ う に 複 数 回 の 撮 影 を 行 い ,そ れ ら を 合 成 す る こ と で ,エ リ ア を 網 羅 す る 1 枚 の 画 像 を 生 成 す る . か 外 部 パ ラ メ ー タ 世 界 座 標 系 か ら カ メ ラ 座 標 系 に 変 換 す る た め の パ ラ メ ー タ . 世 界 座 標 系 は 絶 対 的 な 座 標 で あ り , カ メ ラ 座 標 系 は カ メ ラ か ら 見 た 地 物 の 位 置 を 示 す 座 標 系 で あ る . 学 習 デ ー タ 教 師 あ り 学 習 に お い て ,モ デ ル 構 築 の た め に 用 い ら れ る 入 力 と 結 果 が セ ッ ト に な っ た デ ー タ .教 師 デ ー タ や ト レ ー ニ ン グ デ ー タ と も 呼 ぶ . 観 測 波 長 幅 カ メ ラ や セ ン サ が 計 測 す る 電 磁 波 の 波 長 帯 の 広 さ . き 機 械 学 習 コ ン ピ ュ ー タ を 用 い て ,学 習 デ ー タ に 対 し て 反 復 的 な 処 理 に よ っ て 入 力 と 結 果 の 間 の 法 則 を 見 つ け 出 す 方 法 . キ ャ リ ブ レ ー シ ョ ン タ ー ゲ ッ ト 空 撮 画 像 に 記 録 さ れ た 画 素 値 を ,反 射 率 に 変 換 す る た め の 基 準 と な る オ ブ ジ ェ ク ト . 多 く の 場 合 , 白 色 の ボ ー ド の よ う な 形 状 を し て お り ,空 撮 画 像 に 写 る よ う に 地 表 に 配 置 す る . 吸 収 光 合 成 有 効 放 射 量 太 陽 光 の う ち , 植 物 の 光 合 成 に 有 効 な 約 0.4 µm か ら 0.7 µm の 波 長 帯 の エ ネ ル ギ ー .区 分 用 語 説 明 く 空 中 三 角 測 量 航 空 機 な ど か ら 撮 影 し た 空 中 写 真 を 用 い て 地 図 を 作 成 す る 作 業 に お い て 行 う 作 業 の 1 つ .重 複 領 域 を 持 つ 複 数 の 空 中 写 真 と ,写 真 に 写 っ た 座 標 が 既 知 の 基 準 点 を 用 い て ,空 中 写 真 の 位 置 や 方 向 を 決 定 す る 方 法 . 群 落 反 射 率 植 生 の 群 落 と し て の 電 磁 波 の 反 射 率 . こ コ ン ポ ジ ッ ト 画 像 複 数 の 異 な る 波 長 帯 に つ い て 観 測 し た 画 像 を 1 つ の デ ー タ に 合 成 し た 画 像 .コ ン ポ ジ ッ ト 画 像 と す る こ と で ,ソ フ ト ウ ェ ア 上 で 取 り あ つ か い や す く な り ,フ ォ ル ス カ ラ ー 表 示 な ど を 容 易 に 行 え る よ う に な る . さ サ ポ ー ト ベ ク タ ー 回 帰 サ ポ ー ト ベ ク タ ー マ シ ン を 回 帰 に 適 用 し た も の . SVR (Support Vector Regression) と も い う . サ ポ ー ト ベ ク タ ー マ シ ン 認 識 性 能 が 高 い 機 械 学 習 手 法 の 1 つ .未 学 習 デ ー タ に 対 し て も 高 い 認 識 性 能 を 発 揮 す る .マ ー ジ ン 最 大 化 と い う 各 デ ー タ と の 距 離 が 最 も 大 き く な る よ う な 超 平 面 を 求 め る 点 が 特 徴 で あ る .SVM
(Support Vector Machine) と も い う .
し 湿 害 土 壌 中 の 水 分 が 過 剰 と な る こ と に 起 因 す る 農 作 物 被 害 . し ぼ り カ メ ラ に 入 射 す る 光 の 量 を 制 御 す る た め の 仕 組 み , ま た は そ の 程 度 を 示 す 値 . シ ャ ッ タ ー 速 度 カ メ ラ の 撮 像 素 子 が 光 を う け る 時 間 .露 光 時 間 な ど と も 言 う . 収 量 構 成 要 素 収 量 を そ れ を 構 成 す る 項 目 に 分 解 し た も の .稲 の 場 合 , 穂 数 ,1 穂 籾 数 , 千 粒 重 , 登 熟 歩 合 か ら 成 り , こ れ ら を 掛 け あ わ せ る こ と で 収 量 が 求 ま る . 植 生 指 数 リ モ ー ト セ ン シ ン グ に お い て ,植 生 の 活 性 度 や バ イ オ マ ス 量 の 推 定 な ど に 用 い ら れ る ,空 撮 画 像 の 複 数 の 波 長 帯 の 画 素 値 あ る い は そ れ か ら 変 換 し た 反 射 率 か ら 計 算 さ れ る 値 .
区 分 用 語 説 明 せ 全 天 日 射 量 単 位 面 積 あ た り の 全 天 日 射 エ ネ ル ギ ー .全 天 日 射 は ,上 空 か ら そ の 平 面 に 入 射 す る 全 て の 方 向 か ら の 太 陽 放 射 . そ 双 方 向 性 反 射 関 数 あ る 物 体 表 面 に 入 射 し た 光 が ど の 方 向 に ど れ だ け 反 射 す る か を 示 す 関 数 . ち 中 耕 培 土 ダ イ ズ 栽 培 な ど で 欠 か せ な い 栽 培 管 理 技 術 の 1 つ . 除 草 , 倒 伏 防 止 , 通 気 性 の 改 善 な ど の 効 果 が あ る . 中 心 波 長 観 測 波 長 帯 の 中 心 に 位 置 す る 波 長 . て デ ジ タ ル 表 面 モ デ ル 地 物 の 表 面 の 高 さ 情 報 を 画 素 値 に 持 つ 画 像 . Digital Surface Model (DSM) と も 言 う .
電 子 国 土 基 本 図 国 土 地 理 院 が 提 供 す る 地 形 図 や 空 中 写 真 な ど を デ ジ タ ル デ ー タ 化 し た も の . と 土 壌 体 積 含 水 率 土 壌 中 の 全 体 の 体 積 に 対 す る 水 の 体 積 の 割 合 . ド ロ ー ン 遠 隔 操 作 で き る 無 人 航 空 機 .多 く の 場 合 ,複 数 枚 の プ ロ ペ ラ を 有 し た マ ル チ コ プ タ ー を 指 す こ と が 多 い . な 内 部 パ ラ メ ー タ カ メ ラ 座 標 系 か ら 画 像 座 標 系 (平 面 座 標 ) に 変 換 す る た め の パ ラ メ ー タ . に 日 射 条 件 太 陽 高 度 (あ る い は 太 陽 天 頂 角 ),入 射 す る 光 の 散 乱 光 (あ る い は 直 達 光 ) が 占 め る 割 合 な ど . は 背 景 反 射 率 主 に 地 表 面 の 反 射 率 の こ と を 指 す .作 物 圃 場 の 場 合 に は , 土 壌 や 水 面 な ど が 背 景 に 該 当 す る . ハ イ パ ー ス ペ ク ト ル 画 像 マ ル チ ス ペ ク ト ル 画 像 よ り も 波 長 分 解 能 が 高 い 画 像 . 反 射 率 画 像 被 写 体 の 反 射 率 を 画 素 値 に 格 納 し た 画 像 . バ ン ド ル 調 整 推 定 し た 内 部 及 び 外 部 パ ラ メ ー タ を 用 い て 特 徴 点 の 世 界 座 標 を 画 像 座 標 に 変 換 し ,特 徴 点 の 実 際 の 画 像 上 の 座 標 と 比 べ た と き に , そ の 差 (再 投 影
区 分 用 語 説 明 ふ フ ォ ル ス カ ラ ー リ モ ー ト セ ン シ ン グ で し ば し ば 用 い ら れ る 空 撮 画 像 の 表 示 方 法 で ,特 定 の 地 物 を 強 調 す る た め に 用 い ら れ る . 例 え ば , 植 生 を 強 調 す る 場 合 に は , 近 赤 外 波 長 帯 の 画 素 値 を RGB 表 示 の R に 割 り 当 て ,G と B に 可 視 光 の 波 長 帯 を 割 り 当 て る . プ ラ ン ト キ ャ ノ ピ ー ア ナ ラ イ ザ ー 可 搬 型 の LAI を 計 測 す る 機 器 . ほ ポ イ ン ト ク ラ ウ ド 3 次 元 位 置 座 標 や 色 情 報 な ど を 情 報 と し て 持 つ 点 群 デ ー タ . 放 射 輝 度 物 体 の 表 面 上 か ら あ る 方 向 に 対 し て 放 出 さ れ る 放 射 束 を あ ら わ す た め の 物 理 量 . 放 射 照 度 単 位 面 積 あ た り の 入 射 放 射 束 . 放 射 伝 達 モ デ ル 太 陽 光 が 大 気 に よ っ て 散 乱 や 吸 収 す る 過 程 , ま た ,植 生 群 落 に よ っ て 透 過 ,吸 収 及 び 反 射 す る 過 程 を 数 式 で 表 現 し た も の . ま マ ル チ ス ペ ク ト ル 画 像 被 写 体 か ら の 放 射 を 複 数 の 波 長 帯 に つ い て 観 測 し た 画 像 .通 常 ,波 長 帯 毎 に 画 像 デ ー タ 化 さ れ る . み 水 収 支 モ デ ル あ る 領 域 に お け る 水 の 流 入 や 流 出 を 推 定 す る た め に 数 式 で 表 現 し た も の . も モ ン テ カ ル ロ 光 追 跡 法 コ ン ピ ュ ー タ で 光 線 追 跡 を 行 う 方 法 の 1 つ で ,入 射 し た 光 子 に つ い て , 乱 数 を 使 っ て 反 射 や 吸 収 , 進 む 方 向 を 決 定 す る 方 法 . ゆ 有 効 積 算 気 温 あ る 基 準 日 か ら ,基 準 値 を 超 え た 気 温 の み を 可 算 し た 合 計 気 温 . よ 葉 面 積 指 数 単 位 面 積 内 に 存 在 す る 植 物 の 葉 の 総 面 積 .Leaf
Area Index (LAI) と も 言 う .
ら ラ ジ オ メ ト リ ッ ク 補 正 空 撮 画 像 に 記 録 さ れ た 値 に つ い て ,セ ン サ 感 度 特 性 な ど に 起 因 す る ズ レ を 補 正 す る 処 理 . り リ モ ー ト セ ン シ ン グ セ ン サ を 用 い て 遠 隔 で 対 象 物 か ら 放 射 さ れ る 電 磁 波 を 観 測 し て ,そ の 対 象 物 の 何 ら か の 情 報 を 取 得 す る 技 術 .
区 分 用 語 説 明
れ レ ッ ド エ ッ ジ 赤 色 と 近 赤 外 波 長 帯 の 間 に 位 置 す る 波 長 帯 .
ろ ロ バ ス ト 性 外 乱 に よ る 変 化 を 防 ぐ 性 質 .頑 強 性 や 頑 健 性 な ど
と も 言 う .
E EVI2 Enhanced Vegetation Index 2 の 略 . リ モ ー ト セ ン
シ ン グ で 用 い ら れ る 植 生 指 数 の 1 つ で あ る EVI
(Enhanced Vegetation Index) を 2 つ の 波 長 帯 ( 赤
色 及 び 近 赤 外) の み で 表 現 で き る よ う に 拡 張 し
た も の .
F FLiES Forest Light Environmental Simulator の 略 .モ ン テ
カ ル ロ 光 追 跡 法 を 用 い た 放 射 伝 達 モ デ ル を 実 行 す る シ ミ ュ レ ー タ .
G GCPs Ground Control Points の 略 .オ ル ソ 補 正 に お い て ,
画 像 中 に 設 置 さ れ る 座 標 が 既 知 の 点 .こ れ に よ っ て , 画 像 全 体 が 正 確 な 位 置 座 標 に 変 換 さ れ る .
GPS Global Positioning System の 略 . 米 国 が 運 用 す る
地 球 上 の 現 在 位 置 を 測 定 す る た め の シ ス テ ム .
I ISO 感 度 撮 像 素 子 の 光 に 対 す る 感 度 の 強 さ .感 度 が 高 け れ
ば ,暗 い 場 所 に お い て も 速 い シ ャ ッ タ ー 速 度 で 撮 影 が 可 能 と な る .
L LAD Leaf Area Density の 略 . 葉 面 積 密 度 の こ と . 葉 面
積 密 度 は ,単 位 体 積 あ た り に 存 在 す る 植 物 の 葉 の 面 積 .
LAI 増 加 速 度 LAI が 増 加 (あ る い は 減 少 ) す る 速 度 .時 系 列 の
LAI を 線 形 回 帰 し た 場 合 に は ,説 明 変 数 に か か る 係 数 が 増 加 速 度 に 該 当 す る .
M MAE Mean Absolute Error の 略 . 平 均 絶 対 誤 差 の こ と .
MR Multiple Regression の 略 . 重 回 帰 分 析 の こ と .
N NDVI Normalized Difference Vegetation Index の 略 .正 規
化 差 植 生 指 数 の こ と .リ モ ー ト セ ン シ ン グ で し ば
し ば 用 い ら れ る 代 表 的 な 植 生 指 数 の1 つ .数 式 上 ,
区 分 用 語 説 明
R RED Red spectral band の 略 . 赤 色 波 長 帯 , ま た は そ の
反 射 率 の こ と .
RMSE Root Mean Square Error の 略 . 二 乗 平 均 平 方 根 誤
差 の こ と .
S SAVI Soil-Adjusted Vegetation Index の 略 . リ モ ー ト セ
ン シ ン グ で 用 い ら れ る 植 生 指 数 の 1 つ .背 景 反 射 率 の 変 動 の 影 響 を 小 さ く し よ う と 試 み た も の . SR Simple Ratio の 略 . リ モ ー ト セ ン シ ン グ で 用 い ら れ る 最 も シ ン プ ル な 植 生 指 数 の 1 つ .数 式 上 ,赤 色 波 長 帯 や 近 赤 外 波 長 帯 の 反 射 率 の 変 動 に よ り , 指 数 値 が 大 き く 変 動 し や す い 特 徴 が あ る .
U UAV Unmanned Aerial Vehicle の 略 . 無 人 航 空 機 の こ
1
序論
1.1 背景
作物の栽培管理を効率化あるいは高度化することを目的として,衛星リモートセンシン グを活用する試みが多くなされてきた.人工衛星に搭載されたセンサによって作物圃場を
撮 影 し , 撮 影 し た 衛 星 画 像 が 持 つ 画 素 値 を 用 い て 正 規 化 差 植 生 指 数 (Normalized
Difference Vegetation Index : NDVI) などの植生指数を計算し,その大小に基づいて作物の生 育状況を推定して,収穫量の推定,施肥や収穫の時期判断などを行うものである. これらの衛星リモートセンシングの利用には課題がある.人工衛星は宇宙空間 (高高度) から画像を撮影するため,数 km 以上の広範囲を一度に撮影することができる一方,えら れる衛星画像の空間分解能 (画像解像度) が低い (数十 cm ~ km).このため,広域を対 象として地域内の生育傾向を把握するような用途には適するが,圃場内における生育状況 の空間分布を詳細には把握できず,精密な栽培管理には適さない.数十 cm 分解能の衛星 画像もあるが,一般に,農家が栽培管理に利用するには高価である.図 1-1 に空間分解能 の異なる2 つの空撮画像を示す.左図は,低高度 (約 60 m) から無人航空機 (Unmanned
Aerial Vehicle : UAV) で撮影した画像で空間分解能は 5 cm である.圃場内における植栽の 疎密や生育ムラが判読できることがわかる.一方,右図は,同一の圃場を人工衛星で撮影 した画像で空間分解能は10 m である.図から明らかなように,衛星画像の場合には圃場 内の状況を詳細に把握することはできない.更に,人工衛星による撮影は光学衛星の場合 天候の影響をうけやすく,雲が掛かっている場合には地表面を撮影することができず,生 育モニタリングのような定期的な観測を必要とする場合には,データを十分な頻度でえら れない可能性がある (同一地点の撮影頻度は 1 日 ~ 数十日に 1 回ではあるが,被雲して いると地表が撮影できない). 図 1-1 空間分解能が異なる空撮画像の例.左図:空間分解能 5 cm の UAV によって撮
近年,ドローンに代表されるような UAV のさまざまな分野における実用化の検討が活 発になされている.UAV には,ホビー用途から産業用まで幅広い種類のものが販売され ており,マルチスペクトル画像撮影用センサを搭載したタイプの製品も販売されている. UAV は,図 1-1 の左図に示したように,飛行高度を低くすることで解像度数 cm の高解 像度画像を撮影することもできる.また,人工衛星の場合には,地球の周りを所定の軌道 に沿って周回しているため,対象圃場の上空を通過するときにだけ撮影することができる が,UAV の場合には利用者の都合にあわせて任意の時間帯に撮影することができるので, 人工衛星と比べて観測自由度が高い (対象圃場を撮影する際のタイミング上の制限が少な い) と言える.これらのことから,UAV は人工衛星に代わるセンサプラットフォームとし ての活用が期待されている. マルチスペクトル画像撮影用センサを搭載したドローンの例を図 1-2 に示す.図は,3D Robotics 製の 「Solo」 と呼ばれる小型ドローンに,マルチスペクトル画像取得用センサ である Parrot 製の 「Sequoia」 が取り付けられたものである.
図 1-2 マルチスペクトル画像取得用センサ 「Sequoia」(Parrot, Paris, France) を搭載し
た小型 UAV「Solo」(3D Robotics, Berkeley, USA) の外観.
1.2 目的
1.1 節で述べた背景を踏まえ,本研究においては,UAV の観測自由度や高い空間分解能 を活かして,作物圃場における栽培管理作業の実施判断,実施内容の検討,あるいは栽培 管理作業の効果を評価するのに役立つ技術を開発することを目的とした. 作物圃場における栽培管理作業には,除草,防除,施肥に加え,作物特有の管理 (例え ば,水稲であれば中干による土壌活力の回復,ダイズであれば畝立てによる排水性改善など) がある.いずれも,植物体の健全で旺盛な生育を助け,収穫物の高品質化あるいは多 収化を意図したものである.一般に,これらの栽培管理作業を支援するためには,作物圃 場において指標となるデータを収集しなければならない.しかしながら例えば,追肥の量 を判断するのに草丈や茎数,SPAD による評価が推奨されているが,圃場内に入る必要が あり多くの時間と労力を要するため外観と経験によって判断されることが多い.また,草 丈や茎数,SPAD を圃場内で計測したとしても,調査した地点のデータしかえられないた め,圃場全体を面的に把握できない.そこで,UAV 画像から草丈や茎数に代わる指標と
して葉面積指数 (Leaf Area Index : LAI) などを推定することができれば,追肥効果を量的
にかつ面的に評価することが可能になると考えられる.面的に圃場全体を把握できること はUAV を用いる利点の 1 つである. 図 1-3 に作物,指標及び栽培管理作業の例を示す.本研究では,赤色及び青色枠で示し た範囲を対象とした.水稲を対象作物として LAI を推定する手法を開発し,その手法に よって推定した LAI を用いて水稲圃場における追肥効果の評価を行った.水稲は日本を 含むアジア地域における重要作物である.また,UAV リモートセンシングのほかの利用 可能性の検討として,ダイズを対象として土壌体積含水率を推定する手法を検討し,それ によって湿害対策に向けた湿害発生予測可能性について検討した.日本におけるダイズ栽 培は,湿害による減収など,他国と比べて多収化に課題がある.なお,本研究の対象外と した中には,生育の均一化に向けた NDVI などの植生指数に基づく生育ムラの把握や,圃 場の均平化作業に向けた地形把握など,民間企業により事業化されているサービスがある. 図 1-3 本研究で開発対象とする範囲 (赤色及び青色枠).
1.3 想定される課題
前節で述べたように,UAV による観測は人工衛星と比べて観測自由度が高い.具体的 には,風雨が無ければ曇天でも観測が可能であること,日中であれば時間帯を選ばないこ とがあげられる.人工衛星の場合には,宇宙空間より撮影するため,曇天の場合には地表 面が見えないため撮影できない.また,一般的な地球観測衛星 (気象衛星などの静止衛星 を除く) は上空を通過した際のみ撮影することができるため,日中の任意の時間に撮影す ることができないなどの制限がある.この高い観測自由度の結果,UAV による観測時の 日射条件は,人工衛星と比べて様々となる可能性がある.同一の被写体であっても日射条 件が異なると,空撮画像に記録される値が変動する.これは,雲量や太陽高度によって, 被写体に入射する光の方向及び量が変動するため,被写体から反射され UAV に搭載され たセンサが観測する光の量も変化すると考えられるためである. 以上から,衛星リモートセンシングで開発されてきた技術をそのまま UAV 画像に応用 することは誤った結果をえることに繋がる可能性がある.ある時点における相対関係を把 握する場合 (1.2 節で紹介したような,植生指数の大小関係から撮影時点における圃場内の 生育ムラを把握するような場合) と比べて,時系列の UAV 画像データを扱う場合 (例え ば,生育変化を追跡するために定期的に圃場を撮影するような場合),各 UAV 画像の撮影 時の日射条件が異なることが想定されることから特に留意が必要である.そこでまずは, 日射条件の変動による UAV 画像の画素値への影響について評価することが,栽培管理支 援の技術開発に先立って必要である.1.4 本論文の構成
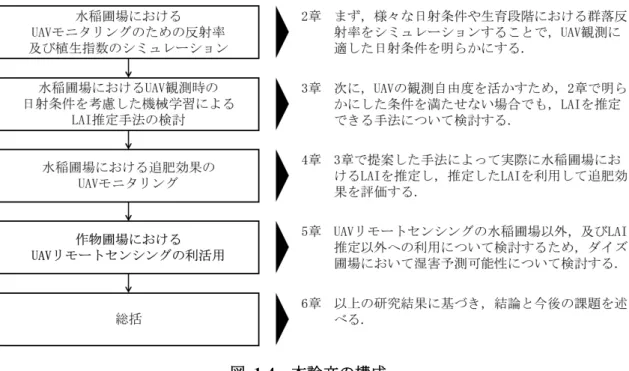
本論文の構成を図 1-4 に示す.はじめに 2 章において 1.3 節で述べた課題に対する検討 結果について述べる.次に3 章において栽培管理作業の評価指標として有用と考えられる LAI の推定手法の開発について述べ,4 章においてそれを用いた栽培管理作業の評価を実 施した結果について説明する構成とした.5 章では,4 章で述べた評価支援技術のほかに, 作物圃場における UAV リモートセンシングの利用可能性について検討し,最後に 6 章に おいてこれらの検討結果について総括した.2
水稲圃場における
UAV モニタリングのための群落反射率及び
植生指数のシミュレーション
2.1 緒言
増加する需要に対して質・量ともに高い収穫物を生産するためには,作物圃場において 適切な栽培管理が行われる必要がある.施肥や水管理などの適切な管理作業を農家が決定 するためには,まず第一に作物の生育をモニタリングする必要がある.LAI はしばしば作 物圃場において生育をモニタリングするための指標として用いられる.これは,LAI が作 物の状態を示す外観的な特徴や生産性を把握する上で重要な指標であるからである1)~4). LAI はプラントキャノピーアナライザーなどの可搬型計測機器を使って地上レベルで手 動計測することができる5).作物圃場における LAI の計測は,1 度の計測で計測すること ができる範囲が限られているため,圃場全体の計測にはしばしば多くの時間と労力を要す る. この問題に対して,リモートセンシング技術を用いて LAI をモニタリングする試みが 過去の研究でいくつかなされてきた6)~8).これらの研究で示されている推定手法は,作物 圃場で撮影されたマルチスペクトル画像からえられた群落反射率を使って計算した植生指 数が用いられることが多い.この目的に対して,NDVI や SAVI などのさまざまな種類の植生指数が開発されてきた9)~14).例えば,Ali et al. (2015) は,NDVI や SAVI に対してレ
ッドエッジ波長帯を追加することによって改善を図った植生指数を使ってコムギの LAI を推定した6).これらの植生指数はしばしば衛星リモートセンシングデータから計算され るが,農家などのエンドユーザーにとっては,費用が高い (特に高分解能画像の場合) こ とやリモートセンシング技術をあつかうスキル不足などから,衛星リモートセンシングデ ータを取りあつかうことは難しかった. 近年,UAV が普及するにつれて15),空撮画像を取得することが比較的容易になってき たことから,作物圃場における農家による利用が期待される.UAV を用いて撮影した空 撮画像に対してリモートセンシング技術を適用する試みがいくつかなされてきている. UAV を用いて撮影した空撮画像を解析することによってえられた情報は,育種16),17),栽 培管理18),19),収量予測20),21)などに用いられている.例えば,向山ら (2011) は,ハイパー
ることを目的として,UAV で収集したマルチスペクトル画像から LAI の成長を評価した 21). UAV は悪天候などの制限された条件を除いて,任意のタイミングで飛行させることが できる.そのため,衛星画像と比較して,UAV による空撮画像はさまざまな日射条件下 で撮影されうる.この日射条件には,入射光に対する散乱光の割合や直達光の入射角度 (太 陽天頂角) などがある.日射条件が異なると,同一の被写体であっても観測される群落反 射率は変動する22),23).その結果,植生指数が反射率の比を用いる,あるいは正規化を行う ことによってそういった変動の影響を軽減していたとしても,この群落反射率の変動は植 生指数の値に影響を及ぼしうる.日射条件によって影響をうけた植生指数は,農家が作物 の生育状態を誤って判断することに繋がる可能性がある.しかしながら,作物圃場におけ る UAV を用いたモニタリングのために植生指数を用いるケースにおいて,日射条件の影 響を考慮に入れた研究は少ない. そこで本研究では,群落反射率及び植生指数に対する日射条件の影響を評価することを 目的として,放射伝達モデルを用いてさまざまな日射条件における水稲圃場の群落反射率 をシミュレーションした.コメはアジアにおいて主食であり,大きな生産面積を占めてい る作物であるため,本研究では水稲圃場を対象とした.さまざまな生育段階における日射 条件の影響を評価するために,LAI や草高などの群落構造のパラメータを生育段階に応じ て変化させることによってシミュレーションを行った.シミュレーションした群落反射率 と植生指数は LAI を横軸にとってプロットし,日射条件に対する変化を評価した.シミ ュレーション結果を検証するために,実際の農家が管理する水稲圃場のいくつかの生育段 階において UAV によるマルチスペクトル画像の空撮を行った.そして,画像からえられ た群落反射率とシミュレーションした群落反射率を比較した.これらの結果に基づいて, 作物圃場における UAV モニタリングにとって最適な日射条件や植生指数を検討した.
2.2 材料と方法
2.2.1. 放射伝達モデルによる群落反射率のシミュレーション 群落反射率をシミュレーションする手法として放射伝達モデルを用いた.太陽から大気 に入射した光子は,大気粒子による散乱や植生群落による反射,透過及び吸収などの過程 を経て観測者 (例えば,スペクトルセンサなど) に届く.これらの過程を放射伝達モデル はモデリングする.群落反射率は群落に入射する光子数に対する観測者が観測した光子数の比として計算される.本研究では,代表的な放射伝達モデルの1 つである FLiES (Forest
Light Environmental Simulator)22),24)を群落反射率計算のために採用した.FLiES は,モンテ
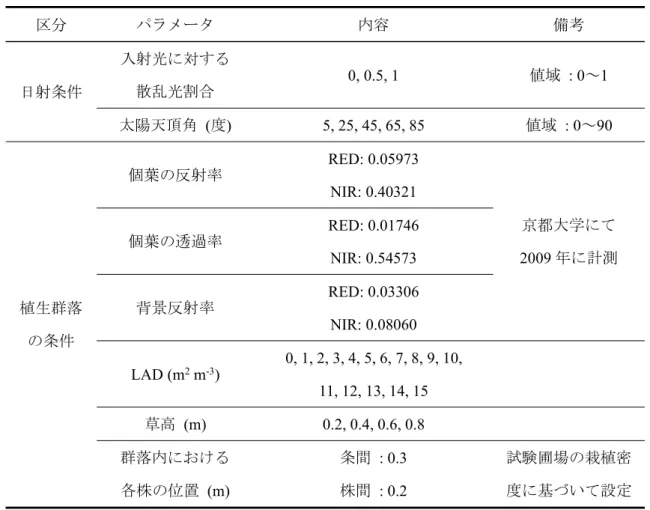
カルロ光追跡法に基づいて,大気及び群落内における放射伝達過程をシミュレーションし, 双方向性反射関数,吸収光合成有効放射量及び群落上部及び下部における放射輝度などの さまざまな植生の光環境パラメータを計算することができる.FLiES は,本来森林におけ る群落反射率をシミュレーションするために開発され,さまざまな研究でも用いられてき たが25)~30),1 年生作物の群落反射率をシミュレーションするために利用された実績もある 14),31). FLiES は日射条件や群落構造に関するパラメータが群落反射率に与える影響を評価す ることが可能である.本研究で用いたパラメータには,日射条件のパラメータとして入射 光に対する散乱光の割合及び直達光の太陽天頂角,群落構造パラメータとして稲株の位置 座標,草高,個葉の反射率と透過率,背景反射率 (水田の場合,水面の反射率),葉面積密
度 (Leaf Area Density : LAD) が含まれる (表 2-1).群落の LAI は,単位面積あたりの株数,
1 株あたりの体積及び LAD を掛けあわせることによって計算した.本研究では,稲株の 形状として回転楕円体を採用し,その体積は草高と半径を用いて計算した.なお,半径に
ついては株間の1/2 の長さと仮定した.
群落反射率は赤色波長帯 (RED : 640 - 680 nm) と近赤外波長帯 (NIR : 770 - 810 nm) の 2
つの波長帯に対してシミュレーションした.また,本研究において評価する植生指数とし
て,これら2 つの波長帯を用いて定義される SR (Simple Ratio)11),EVI2 (Enhanced Vegetation
Index 2)13),NDVI (Normalized Difference Vegetation Index)9)の3 つの植生指数を選定した.こ
れらの植生指数は以下の式 2-1,式 2-2 及び式 2-3 で定義される. RED NIR SR 式 2-1
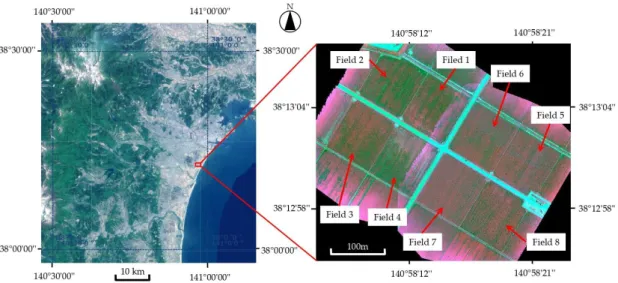
1 4 . 2 5 . 2 2 RED NIR RED NIR EVI 式 2-2 RED NIR RED NIR NDVI 式 2-3表 2-1 本研究で設定した FLiES の主要パラメータ 区分 パラメータ 内容 備考 日射条件 入射光に対する 散乱光割合 0, 0.5, 1 値域 : 0~1 太陽天頂角 (度) 5, 25, 45, 65, 85 値域 : 0~90 植生群落 の条件 個葉の反射率 RED: 0.05973 NIR: 0.40321 京都大学にて 2009 年に計測 個葉の透過率 RED: 0.01746 NIR: 0.54573 背景反射率 RED: 0.03306 NIR: 0.08060 LAD (m2m-3) 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15 草高 (m) 0.2, 0.4, 0.6, 0.8 群落内における 各株の位置 (m) 条間 : 0.3 株間 : 0.2 試験圃場の栽植密 度に基づいて設定 2.2.2. 地上計測によるシミュレーションされた群落反射率の評価 本研究では,FLiES によってシミュレーションした群落反射率を検証するために,日本 の宮城県仙台市 (東経 140 度 58 分 14 秒,北緯 38 度 13 分 2 秒,図 2-1) に位置する 実際の農家の4 圃場において,マルチスペクトル空撮画像を UAV を用いて複数の生育段 階 (2017 年 6 月 20 日,7 月 6 日,8 月 2 日) に撮影した.この 4 圃場で栽培された品種は, 宮城県において最も一般的に栽培されている品種である 「ひとめぼれ」 であった.4 圃
場の面積は合計で3.48 ha (圃場 1 : 0.84 ha,圃場 2 : 0.86 ha,圃場 3 : 0.90 ha,圃場 4 : 0.88 ha)
であり,栽植密度は条間が30 cm,株間が 20 cm であった.圃場毎に 20 試験区,合計 80
図 2-1 試験圃場の位置と UAV によって撮影したマルチスペクトル画像から生成したオ
ルソモザイク反射率画像.左図は,国土地理院の電子国土基本図 (オルソ画像) か
ら引用した空撮画像32).右図は2017 年 7 月 6 日撮影のオルソモザイク反射率画像
のフォルスカラー RGB コンポジット画像であり,緑色波長帯が B,赤色波長帯が
G,近赤外波長帯が R に割り当てられている.
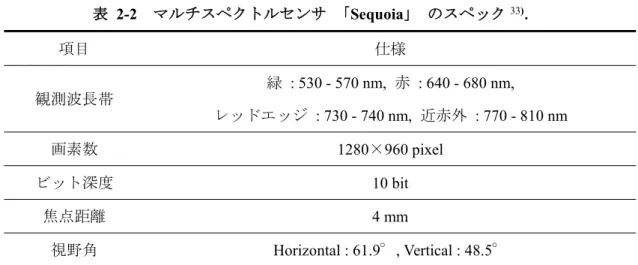
マルチスペクトルセンサである 「Sequoia」 が搭載された UAV である 「Solo」 をマ
ルチスペクトル画像の撮影に用いた.「Sequoia」のスペックは表 2-2 に示すとおりである. マルチスペクトル画像は上空60 m の高さから撮影し,1 枚の撮影範囲は約 0.4 ha で,圃 場全体をカバーするために約400 枚撮影した.地上 60 m から撮影した場合,撮影画像の 空間分解能は5.7 cm である.全てのマルチスペクトル画像は,進行方向及びその直角方向 のいずれの隣り合う画像同士も70 % のオーバーラップ (重複領域) となるように撮影間 隔を設定した.撮影されたマルチスペクトル画像に対しては,オルソ補正済み反射率画像 (反射率が画素値として格納されている画像) を作成するための処理を画像処理ソフトウ
ェアである 「Pix4D mapper」(Pix4D, Lausanne, Switzerland) を用いて行った.オルソ補正
済み反射率画像を作成するための各種処理は,Pix4D mapper に予め処理パラメータ (表
表 2-2 マルチスペクトルセンサ 「Sequoia」 のスペック33). 項目 仕様 観測波長帯 緑 : 530 - 570 nm, 赤 : 640 - 680 nm, レッドエッジ : 730 - 740 nm, 近赤外 : 770 - 810 nm 画素数 1280×960 pixel ビット深度 10 bit 焦点距離 4 mm 視野角 Horizontal : 61.9°, Vertical : 48.5° 表 2-3 オルソ補正済み反射率画像作成のために Pix4D mapper に設定した各種処理パ ラメータ. パラメータ 設定内容 Initial Processing
Keypoints image scale Full
Matching Image Pairs Aerial Grid or Corridor
Matching Strategy Use Geometrically Verified Matching: yes
Targeted Number of
Keypoints Custom (Number of Keypoints: 10000)
Calibration
Calibration Method : Alternative Internal Parameters Optimization : ALL External Parameters Optimization : ALL
Rematch : Custom, yes
Point Cloud and Mesh
Image Scale 1/2, Multiscale : yes
Point Density Optimal
Minimum Number of
Matches 3
Generation Generate 3D Textured Mesh : no
Matching Window Size 7×7 pixels
パラメータ 設定内容
Point Cloud Filters
Use Processing Area : yes Use Annotations : yes
Limit Camera Depth Automatically : no
DSM*1, Orthomosaic and Index DSM and Orthomosaic Resolution 1×GSD *2
DSM Filters Use Noise Filtering : yes
Use Surface Smoothing: yes (Type : Sharp) Radiometric Calibration
Correction Type : Camera and Sun Irradiance Calibration : Input the calibration target
images Reflectance Map
Generated: yes Resolution: 1×GSD
Merge Titles: yes *1 DSM : Digital Surface Model
*2 GSD : Ground Sampling Distance
「Pix4D mapper」 は,マルチスペクトル画像中における特徴点であってほかの画像とマ ッチングするために使われるキーポイントを10000 点以上抽出した.抽出したキーポイン トに基づいて,自動空中三角測量とバンドル調整をポイントクラウドを生成するために実 行した.1 ピクセル以下が推奨されている34)バンドル調整の平均再投影誤差は0.3 ピクセ ル以下であった.また,カメラモデルの最適化を画像センサの内部及び外部パラメータの キャリブレーションのために実行した.5 % 以下が推奨されている34)内部パラメータと 最適化されたパラメータとの相対的誤差は1 % 以下であった.ポイントクラウドに基づい
てデジタル表面モデル (Digital Surface Model : DSM) を 0.05 m の空間分解能を持つオルソ
モザイク反射率画像を生成するために作成した.反射率への変換のために,地上において 撮影開始時と終了時の両方のタイミングで撮影したキャリブレーションターゲット
た,ラジオメトリック補正に関する設定 (表 2-3, Radiometric Calibration - Correction Type)
を行うことで,Pix4D mapper は太陽放射照度,ISO 感度,シャッター速度,F 値などの情
報を反射率の補正に使用する.各圃場の四隅を含む約30 点の GCPs (Ground Control Points)
を画像全体にできる限り万遍無く設定し,オルソモザイク反射率画像の位置補正のために 用いた.GCPs の位置座標は,国土地理院によって公開されている電子国土基本図の 1 つ であるオルソ画像32)を参照して取得した.国土地理院のオルソ画像は1 m 以下の精度で 位置情報が付与されている35).このオルソ画像の位置精度と LAI の地上における手動計 測箇所のばらつきを考慮して,計測点を中心として3 m の直径を持つ円内の画素値を平均 した値をその試験区の群落反射率と定義し,FLiES を用いてシミュレーションした群落反 射率との比較に用いた. 画像を撮影した生育段階と同じときに,草高や LAD を 80 試験区のそれぞれについて 計測した.草高は定規を用いて計測した.LAD はキャノピーアナライザーで計測した LAI を稲株体積と株数で割ることで計算した.稲株体積は計測した草高と直径を用いて回転楕 円体として計算した.なお,ここで用いた直径については,株間と一致するものと仮定し
た.LAI の計測にはプラントキャノピーアナライザー 「LAI-2200」(LI-COR, Inc., Lincoln,
USA)5) を用いた.マルチスペクトル空撮画像を撮影した際の日射条件 (入射光に対する散 乱光割合と太陽天頂角) はそれぞれ,0.23 と 54.4 度 (6 月 20 日),0.34 と 23.6 度 (7 月 6 日),0.98 と 64.6 度 (8 月 2 日) であった.各 UAV フライトは,日射条件に関して比較的 安定した条件下で実行したことから,これらの日射条件は画像撮影の間は一定であると仮 定した.入射光に対する散乱光割合は Erbs et al. (1982) が提案している手法36)を用いて推 定した.この手法で必要な情報である日射量は日本の気象庁が観測したデータ37)を用い た.太陽天頂角については,圃場の位置座標や撮影時刻をもとに計算した.水稲圃場にお いて計測された草高,LAD 及び日射条件をもとに,各試験区における群落反射率を FLiES を用いてシミュレーションした.
2.3 結果
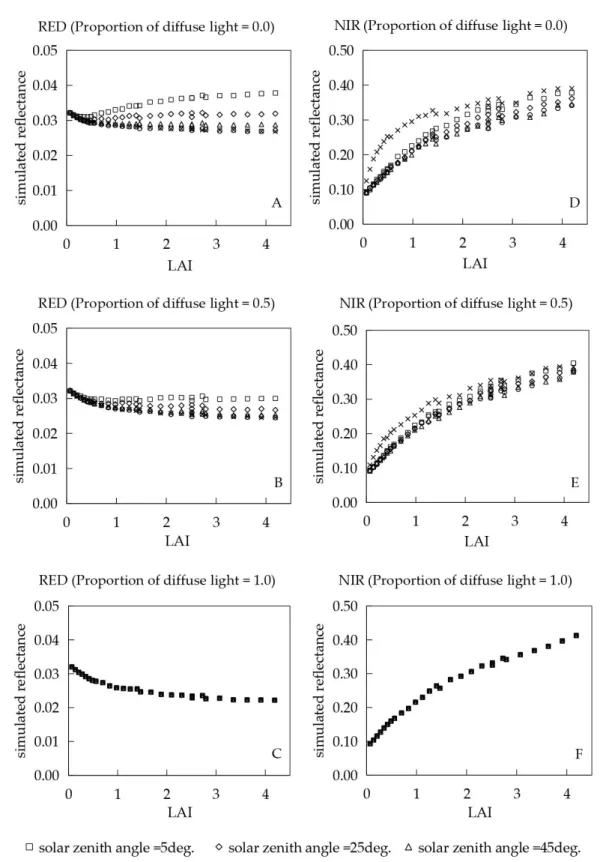
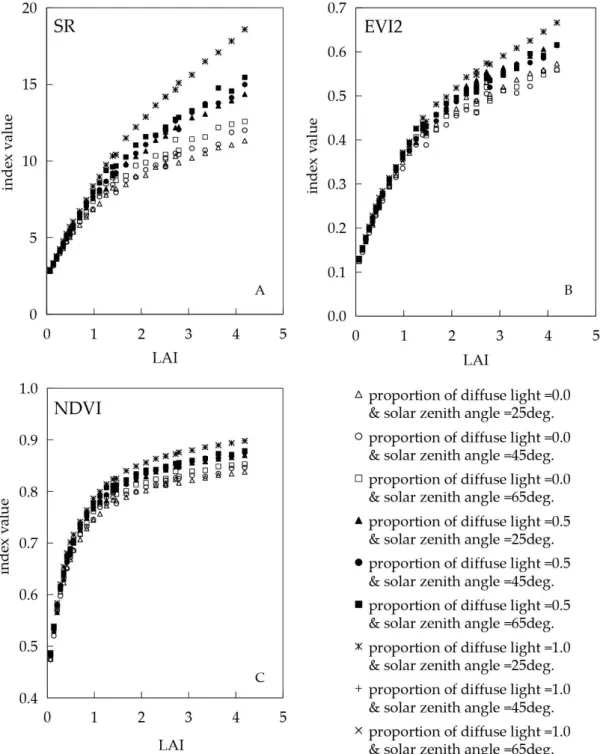
2.3.1. 群落反射率のシミュレーション 図 2-2 は表 2-1 に示した日射条件と群落構造パラメータの各組合せに対して,水稲圃場 の群落反射率を FLiES によってシミュレーションした結果である.シミュレーションし た群落反射率は,本研究では UAV モニタリングの対象とした LAI に対してプロットした. 散乱光割合が1.0 の場合には,RED 及び NIR のいずれにおいても群落反射率は太陽天 頂角の変化に対して影響をうけなかったが,散乱光割合が低くなるにつれてその影響は大 きくなった.散乱光割合が0 及び 0.5 の場合においては,小さい太陽天頂角 (5 度及び 25 度) において RED の反射率が増加した一方,NIR は大きい太陽天頂角 (85 度) において群落 反射率が増加した.NIR に関して,日射条件の違いによって引き起こされる群落反射率の 最小値と最大値の差は LAI が 0.5 のときにおいて 0.1 であった.同様に,RED に関して は LAI が 4.2 のときにおいて 0.01 であった.太陽天頂角が 45 度及び 65 度のときの群落 反射率の値は,散乱光割合が0 や 0.5 であっても,散乱光割合が 1.0 の場合と比較的類似し た値を示した. 2.3.2. 植生指数のシミュレーション 図 2-3 は図 2-2 に示した群落反射率を使って計算した植生指数の結果である.ここで, 太陽天頂角5 度及び 85 度における植生指数は図から除外した.植生指数についても本研 究でモニタリング対象とした LAI に対してプロットした. 植生指数は散乱光割合が1.0 の日射条件において最も高い値をとり,散乱光割合が 0 の 日射条件のときに最も低い値をとった.太陽天頂角が25 度の場合には,45 度及び 65 度 の場合と比べて比較的低い植生指数値を示した.しかしながら,太陽天頂角が群落反射率 に及ぼす影響は,散乱光割合が及ぼす影響と比べて相対的に小さかった.LAI が増加する ほど植生指数の最小値と最大値の差も大きくなる傾向を示した.この差は,SR で最も大
きく,NDVI で最も小さかった.しかし,NDVI はほかの指数と比べて,LAI が小さい段
階で指数値が飽和してしまっていることがわかる.NDVI が飽和する LAI 2 となる時期は,
本研究で用いた試験圃場の場合,分げつ期の終わりから幼穂形成期にあたる.この時期以
図 2-2 表 2-1 に示したパラメータを使って赤色及び近赤外波長帯の群落反射率をシミュ
レーションした結果.シミュレーションは,散乱光割合0,0.5,1,太陽天頂角 5 度,
図 2-3 図 2-2 に示した反射率を用いて計算した植生指数.植生指数である SR,EVI2,
NDVI はそれぞれ,式 2-1,式 2-2 及び式 2-3 で計算した.LAI は稲の株数,草高,
樹冠体積及び樹幹内LAD を掛けあわせることで求めた.図中のシンボルの違いは,
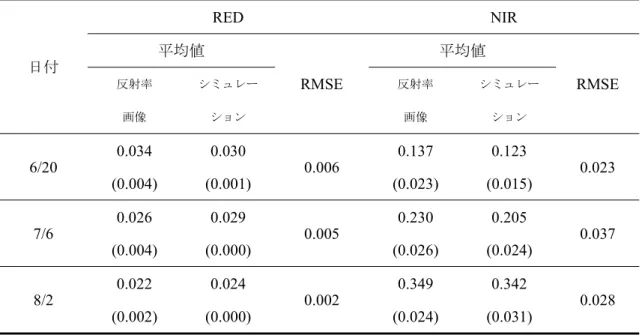
2.3.3. 地上観測データとシミュレーション結果の比較 図 2-4 はマルチスペクトル画像から作成した反射率画像からえた群落反射率を,地上計 測によってえたパラメータに基づいて FLiES を用いてシミュレーションした群落反射率 と比較した結果を示している. 反射率画像からえた群落反射率の標準偏差はシミュレーションした群落反射率よりも大 きかった一方で,それらの平均値は近い値を示した (表 2-4).RED に関して,シミュレー ションした群落反射率は,反射率画像からえた群落反射率に対して,6 月 20 日はわずかに 過小評価,7 月 6 日及び 8 月 2 日はわずかに過大評価した.NIR に関して,シミュレーシ ョンした群落反射率は,反射率画像からえた群落反射率に対して,全ての日においてわず かに過小評価した.反射率画像からえた群落反射率とシミュレーションした群落反射率に 関する RMSE は,群落反射率の平均値の 10 ~ 20 % であった. シミュレーションした群落反射率から計算した植生指数については,反射率画像からえ た植生指数と比べて過小評価する傾向が見られた (表 2-5).反射率画像からえた群落反射 率から計算した植生指数とシミュレーションした群落反射率から計算した植生指数に関す る RMSE は,SR で最も大きく NDVI で最も小さかった. 図 2-4 2017 年 6 月 20 日,7 月 6 日,8 月 2 日に水稲圃場において撮影したマルチスペク トル画像から生成した反射率画像からえた群落反射率と,地上計測で収集したパラ メータに基づいて FLiES でシミュレーションした群落反射率の比較.
表 2-4 反射率画像から計算した群落反射率と FLiES を用いてシミュレーションした群 落反射率の試験区 (80 区) に対する平均値.括弧内の数字は標準偏差を示す.RMSE は,反射率画像から計算した群落反射率とシミュレーションした群落反射率の差に 対して計算した. 日付 RED NIR 平均値 RMSE 平均値 RMSE 反射率 画像 シミュレー ション 反射率 画像 シミュレー ション 6/20 0.034 (0.004) 0.030 (0.001) 0.006 0.137 (0.023) 0.123 (0.015) 0.023 7/6 0.026 (0.004) 0.029 (0.000) 0.005 0.230 (0.026) 0.205 (0.024) 0.037 8/2 0.022 (0.002) 0.024 (0.000) 0.002 0.349 (0.024) 0.342 (0.031) 0.028 表 2-5 反射率画像から計算した植生指数と FLiES を用いてシミュレーションした植生 指数の試験区 (80 区) に対する平均値.括弧内の数字は標準偏差を示す.また, RMSE は反射率画像からえた植生指数とシミュレーションした植生指数の差に対 して計算した. 日付 SR EVI2 NDVI 平均値 RMSE 平均値 RMSE 平均値 RMSE 反射率 画像 シミュレ ーション 反射率 画像 シミュレ ーション 反射率 画像 シミュレ ーション 6/20 4.039 (0.745) 4.066 (0.603) 0.719 0.209 (0.043) 0.193 (0.031) 0.040 0.593 (0.067) 0.600 (0.047) 0.059 7/6 9.041 (1.902) 7.096 (0.845) 2.532 0.394 (0.045) 0.345 (0.041) 0.065 0.794 (0.039) 0.750 (0.027) 0.055 16.010 14.482 0.583 0.568 0.881 0.870
2.4 考察
本研究では,放射伝達モデルに基づいたツールであり過去の研究において作物群落に適 用された実績14),31)のある FLiES を水稲の群落反射率をミュレーションするために用い た.FLiES は植生群落内における反射,透過及び吸収や大気中における大気粒子による吸 収などの過程をシミュレーションすることができる.個葉や背景 (土壌や水面) の反射率, LAD,草高や株の位置座標などを含む各種パラメータを設定することによって,合理的な 群落反射率をえることができる.本研究では,水稲圃場における地上計測に基づいてこれ らのパラメータを設定することで,日射条件が群落反射率及び植生指数に及ぼす影響をシ ミュレーションによって評価した. 試験圃場において UAV を用いて撮影したマルチスペクトル画像から作成した反射率 画像からえた群落反射率は,LAI が同じ値を示した地点であっても異なる値を示すケース が存在した.一方,シミュレーションした群落反射率は LAD と草高が同じ (すなわち LAI が同じ) であれば群落反射率は同じ値となる.この群落反射率の差異は,LAI の測定 誤差に起因するものであると思われる.プラントキャノピーアナライザー 「LAI-2200」 を 使った水稲圃場における LAI の計測では 30%程度の誤差が生じることが報告されている 38).また,シミュレーションにおいて考慮できるパラメータが限定されていることもこの 差異を引き起こす要因の1 つであると思われる.LAI が小さい方がこの差異がより大きく なっていることは,反射率画像からえた群落反射率は背景条件 (乾燥土壌,湿潤土壌ある いは水面かなどの違い) の影響をうけていることを示唆している.これは,LAI が小さく なるほど背景の影響が大きくなるためである.シミュレーションにおいて,稲株の位置座 標や条間及び株間を考慮しているものの,葉の空間分布は正確ではない.各試験区におけ る背景や葉の空間分布などの情報の考慮が,より正確な群落反射率のシミュレーションの ためには必要であると考えられる.しかしながら,各生育段階における反射率画像からえ た群落反射率と植生指数はシミュレーションの結果と近い値を示し,NDVI の RMSE に関して言えば,NDVI が大きくなるほど RMSE が小さくなる傾向は Borgogno-Mondino et
al. (2016)23)の結果と一致していた.これらの結果はシミュレーションが光子の平均的な振
る舞いや日射条件が群落反射率に与える影響の評価をするには十分な精度を有しているこ とを示唆している.
本研究で実行したさまざまな日射条件におけるシミュレーションは,群落反射率計測に
(入射光に対する散乱光の割合が高い) において撮影するのが良いということ.2 つ目は, 晴天時 (入射光に対する散乱光の割合が低い) に撮影する場合には太陽天頂角が極端に小 さいあるいは大きい場合を避け,45 度から 65 度のときに撮影するのが良いということで ある.これらの条件はプラントキャノピーアナライザーを用いた LAI 計測に適している と言われている条件と一致している.プラントキャノピーアナライザーの場合には,直達 光の影響を避けるために観測方向を選ぶことができるため,早朝も観測には適している.し かしながら,マルチスペクトル画像の撮影は観測方向を選べず (スペクトルセンサが直下 視),早朝の撮影は太陽天頂角が大きくなることから適さない.マルチスペクトル画像の撮 影におけるこれらの制限はUAV が持つ観測の自由度 (時間帯や天候による制約が小さい) を低下させてしまう.したがって,上述した画像撮影に望ましい2 つの条件を満たさない 条件で撮影を行う場合には,撮影時刻,圃場の位置座標,雲量などの日射条件による反射 率への影響度を推定できるための情報を画像撮影時に記録しておく必要がある.FLiES に よるシミュレーションの結果からは,日射条件の違いが引き起こす群落反射率の変動はキ ャリブレーションできる可能性があることが推測されたが,キャリブレーション手法につ いては今後の研究課題である. 植生指数は,しばしば作物生育の評価に用いられる.本研究におけるさまざまな日射条 件に対するシミュレーションの結果,NDVI は 3 つの植生指数の中で最もロバスト性のあ る指標であることが示された.このことは,NDVI が多くの研究で用いられている理由を
説明していると思われる.しかしながら,NDVI は SR や NDVI と比べて LAI が小さい
段階で指数値が飽和する傾向を示した.また,SR については,ほかの指数と比べて日射 条件に対して敏感であることを示した.この SR の敏感さは式 2-1 が示すように RED と NIR の変動が直接的に値に反映されるためである.これらのことから,3 つの指数の中に おいては EVI2 が値の飽和がしづらく,日射条件の違いによる変動の影響が小さく,作物 生育の評価に適していると思われた.これらの植生指数を作物生育のモニタリングに用い る場合には,日射条件の違いが引き起こす群落反射率の変動を考慮してキャリブレーショ ンして利用するのが望ましい.
2.5 結論
レーションをさまざまな日射条件や群落構造パラメータに対して実行した.その結果,赤 色波長帯及び近赤外波長帯における群落反射率は,入射光に対する散乱光割合と太陽天頂 角に応じて変動した.その群落反射率の変動は,散乱光割合が低い (0.0 や 0.5) 場合や太 陽天頂角が大きい (85 度) あるいは小さい (5,25 度) 場合において大きくなった.群落 反射率の変動は,これを用いて計算される植生指数 (SR, EVI2 や NDVI など) の値にも影 響を及ぼした.日射条件の違いに対して,SR が最も敏感で NDVI は最もロバスト性を有 していることがわかった.しかしながら,NDVI はほかの植生指数と比べて,より小さい LAI において指数値が飽和する結果を示した.これらの結果から,作物生育をモニタリン グする目的に対しては,3 つの指数の中では EVI2 が最も適した指数であることが示唆さ れた.これらのシミュレーション結果は,実際の農家圃場において UAV を用いて撮影さ れたマルチスペクトル画像からえた群落反射率や植生指数とも類似していた. マルチスペクトル画像の収集にとって望ましい日射条件 (曇天のような高い散乱光割合) は,日射条件の違いによって引き起こされうる変動を軽減することができる.マルチスペ クトル画像の収集にとって望ましくない日射条件においてマルチスペクトル画像の撮影を 行う場合には,日射条件の違いによる群落反射率や植生指数の変動量を推定するために役 立つように,撮影時の日射条件を記録しておくことが求められる.農地における UAV の 利用を促進するという観点では,日射条件の影響をキャリブレーションする手法の開発が, UAV の観測自由度を活かすために必要であると考えられる.
3
水稲圃場における
UAV 観測時の日射条件を考慮した機械学習
による
LAI 推定手法の検討
3.1 緒言
作物圃場において生育状況を定期的に把握 (モニタリング) することは,生産者が適切 な栽培管理を行う上で有用である.また,栽培管理技術の研究開発に携わる技術者にとっ ても,開発技術の評価を行うために生育状況のモニタリングは必要である.生育状況を示 す指標の1 つに LAI がある.LAI は生育状況の把握に役立つだけではなく,作物モデル のインプットとして収量推定精度の向上1)~4)や,気象学や生態学の研究にも活用される39),40) 重要な指標である.LAI はキャノピーアナライザー5)を用いて,地上レベルにおいて非破 壊的に計測することができる. キャノピーアナライザーを用いた計測は,作業者が圃場内に立ち入って手動操作によっ て行う必要がある.そのため,作物圃場内の限られた領域のデータしか収集できない,ま た,作物圃場の面積が大きい場合に全体を評価するには計測に時間と労力を要するなどの 課題がある.これに対して,リモートセンシングによって LAI を間接的に推定する手法 の研究が過去になされてきた6),14),21),41).リモートセンシングによる推定手法では,人工衛 星や航空機に搭載されたマルチスぺクトルセンサによって取得した空撮画像から計算され る反射率や植生指数などを説明変数として用いる.作物圃場全体を包含するように空撮画 像を撮影すれば,特定の領域だけでなく面的な把握が可能となる.また,作業者が作物圃 場内に立ち入る必要がないため,作業時間や労力の軽減が期待される.近年,ドローンに 代表される UAV の普及15)にともなって,作物圃場における空撮画像の取得が比較的安価 かつ容易になったことから,作物圃場において生産者や技術者による利用が促進されるこ とが期待される. UAV による画像撮影は人工衛星による撮影と比べて,観測自由度が高く曇天でも撮影 できる,撮影時間帯の制限が少ない,などの利点がある.Ishihara et al. (2015) は,水稲, トウモロコシ及び牧草を対象に,日中及び季節を通じて継続的に地上レベルで測定したス ペクトルデータを用いて,植生指数が日射条件によって変動することを示した42).また, Hashimoto et al. (2019) は,水稲圃場における群落反射率や植生指数の値が,画像取得時のど同じ群落であっても直達光の入射角によって群落反射率が変動し,近赤外波長帯におけ る変動は最大0.1 であった.この変動にともない,群落反射率から計算される植生指数が 変動することが示された.UAV を活用して作物圃場における生育モニタリングを行う場 合,観測タイミング毎に同一の日射条件であることは稀有であると想定されることから, UAV リモートセンシングを用いた LAI の推定においては日射条件を考慮することが望 ましいと考えられる.また,群落反射率は背景 (土壌,水面や林床植生) の反射率の影響 をうけていることから,観測タイミングにおける日射条件だけでなく背景反射率の変化も 考慮する必要があると考えられる.そこで本研究では,UAV の観測自由度を活かした生 育モニタリングを実現するために,水稲の LAI を対象として,日射条件及び背景反射率 を考慮した推定手法について検討した.推定手法として,現地計測によって収集した実デ ータを用いた回帰分析手法と,放射伝達モデルを用いて作成したシミュレーションデータ を学習データとした機械学習手法のぞれぞれについて検討した.
3.2 材料と方法
3.2.1. データの収集 (1) 試験圃場 マルチスペクトル画像の撮影及び LAI などの地上計測は,図 3-1 に示す日本の宮城県 仙台市の沿岸地域 (東経 140 度 58 分 14 秒,北緯 38 度 13 分 2 秒) に位置する 8 つの 水稲圃場において2 ヵ年 (2017 年,2018 年) にわたり実施した.水稲圃場の面積はいずれ も約0.9 ha であった.LAI を地上計測する試験区を水稲圃場毎に 20 区,合計で 160 区設 定した. 各年における栽培履歴に関する情報を表 3-1 に示す.2017 年及び 2018 年の両年で栽培 した品種‘ひとめぼれ’は宮城県の主力食用品種であり,2018 年に Field 7 及び 8 で栽培 した‘だて正夢’と‘まなむすめ’はいずれも‘ひとめぼれ’を交配親もしくは交配祖先 とした品種である44).図 3-1 宮城県仙台市に位置する実験で用いた水稲圃場.左図は国土地理院の電子国土基 本図 (オルソ画像)32) から引用した図.右図は2018 年 7 月 19 日に UAV を用いて 撮影したマルチスペクトル画像から作成した反射率画像であり,この画像が持つ緑, 赤,近赤外波長帯を B,G,R に割り当てて表示した (フォルスカラー表示). 表 3-1 2017 年及び 2018 年における水稲圃場の栽培履歴など 項目 2017 2018 品種 ひとめぼれ Field 1 - 6 : ひとめぼれ Field 7 : だて正夢, Field 8 : まな娘 作付け方法 Filed 1 - 4 : 直播, Field 5 - 8 : 移植 植栽密度 条間: 30 cm, 株間: 20 cm 作付け日 Field 1 - 4 : 5 月 6~8 日 Field 5 - 8 : 5 月 14~16 日 Field 1 - 4 : 5 月 6~8 日 Field 5 - 8 : 5 月 18~20 日 出穂最盛期 8 月 11 日頃 8 月 10 日頃 収穫日 9 月 20,22 日 9 月 18 日 元肥 40 kg / 10a (N - P - K, 12 % - 22 % - 20 %) 追肥 なし Field 1,2 : 5 kg / 10a (N - K, 20 % - 10 %) Field 4 : 10 kg / 10a (N - K, 20 % - 10 %)
(2) 空撮画像
空撮画像は,UAV を用いて水稲圃場 1 から 4 と 5 から 8 の 2 回に分けて撮影した.UAV
の 「Solo」 を用い,マルチスペクトルセンサの 「Sequoia」 を搭載して撮影を行った.UAV
は水稲圃場上空60 m を飛行しながら水稲圃場全体を網羅するように約 400 枚の画像を撮 影した.撮影画像1 枚あたりの撮影範囲は 0.4 ha であった.全ての画像は進行方向及びそ の直角方向に隣り合う画像同士が70 % ~ 85 % オーバーラップするように撮影間隔を設 定した.撮影した画像を,画像処理ソフトウェア 「Pix4D mapper」 を用いて 1 枚のオル ソ補正済みの反射率画像 (反射率が画素値として格納されている画像) に変換した.オル ソ補正済みの反射率画像への変換のために行った以下に示す各処理は,「Pix4D mapper」に 予め処理パラメータ (表 2-3) を設定しておくことによって自動実行した.はじめに,各画 像中にほかの画像とマッチングするための特徴点を10000 点以上抽出した.抽出した特徴 点に基づいて,自動空中三角測量とバンドル調整を行ってポイントクラウドを生成した.1 画素以下であることが推奨されている34)バンドル調整の平均再投影誤差は0.3 画素以下で あった.センサの内部及び外部パラメータのキャリブレーションを行うために,カメラモ デル最適化を実行した.5 % 以下が推奨されている34)内部パラメータと最適化パラメー タとの相対的誤差は1 % 以下であった.ポイントクラウドから生成した DSM はオルソ補 正に用いられ,0.05 m の空間分解能を持つオルソ補正済みの反射率画像を生成した.反射 率への変換のために,地上において撮影開始時と終了時の両方のタイミングで撮影したキ ャ リ ブ レ ー シ ョ ン タ ー ゲ ッ ト の 画 像 を 入 力 し た ( 表 23, Radiometric Calibration
Calibration).また,ラジオメトリック補正に関する設定 (表 23, Radiometric Calibration -Correction Type) を行うことで,Pix4D mapper は太陽放射照度,ISO 感度,シャッター速度, F 値などの情報を反射率の補正に使用する.オルソ補正においては,画像の位置あわせの ために GCPs を利用した.GCPs は各圃場の隅に設定し,その座標は日本の国土地理院が 公開する電子国土基本図の1 つであるオルソ画像32)を参照して取得した.このオルソ画像 の位置精度35)と LAI の地上における手動計測時の測定位置のばらつきを考慮して,試験 区を中心とした3 m の直径を持つ円内の画素値を平均した値をその試験区の群落反射率 とした.なお,8 月 14 日における圃場 1 から 4 については,画像取得時の不備によりオー バーラップが不足した結果,反射率画像をえられなかった.
(3) LAI
UAV による画像撮影の前日から翌日の間に,全試験区においてプラントキャノピーア
ナライザー「LAI-2200」 を用いて LAI を地上計測した.LAI は 1 試験区につき 2 回計測
してその平均値を求めた. (4) 日射条件と背景反射率 UAV による画像撮影時における日射条件と背景反射率を表 3-2 に示す.入射光に占め る散乱光割合はErbs et al. (1982) の方法36)により算出した.この方法は,実際に観測した データに基づいて,全天日射量に含まれる散乱成分の割合を推定するために開発されたも のであり,全天日射量と大気外全天日射量を変数として用いる.全天日射量は,最寄りの アメダス (観測所名:仙台,試験圃場からの距離:8 km) が記録している全天日射量37)を 用いて,太陽天頂角については,水稲圃場が位置する位置座標 (図 3-1) と画像撮影日時を 用いて算出した45).背景反射率は反射率画像の水面が写っている箇所の画素値を抽出する ことで求めた.なお,8 月 14 日の圃場 1 から 4 については,3.2.1 (2) で述べたように画像 が取得できなかったため対象外として記載していない. 表 3-2 各地上計測日における日射条件と背景条件.上段と下段はそれぞれ,圃場 1 から 4,5 から 8 の値を示している.2018 年 8 月 14 日における上段の値は,マルチスペ クトル画像がえられなかったことから記載していない. 区分 パラメータ 2017 年 2018 年 6/20 7/6 8/2 6/22 6/28 7/10 7/19 8/14 日射条件 入射光に 対する 散乱光割合 0.17 0.23 0.22 0.34 0.98 0.98 0.17 0.43 0.85 0.66 0.17 0.17 0.40 0.91 -0.43 太陽天頂角 (度) 45.3 54.1 52.2 23.1 58.2 64.0 57.1 64.4 51.6 60.4 24.5 32.3 49.1 56.4 -27.0 植生群落 背景 0.10 0.06 0.10 0.04 0.06 0.11 0.10
-3.2.2.LAI の推定方法 (1) 収集データを用いた回帰手法 a) 植生指数のみを説明変数とする指数関数 オルソ補正済み反射率画像からえた群落反射率を用いて計算した植生指数と地上計測し た LAI を用いて,前者を説明変数,後者を目的変数とする LAI 推定式を回帰分析によっ て導出した.LAI 推定式の導出及び精度評価のいずれに対しても,全ての試験区のデータ (n = 1200) を用いた.説明変数として用いる植生指数として,赤色波長帯及び近赤外波長
帯の群落反射率を用いて以下の式 3-1 で定義される EVI213)を選択した.Hashimoto et al.
(2019) によれば,EVI2 は同じ波長帯の群落反射率を用いる SR11)と比べて日射条件の違 いに対する変動が小さく,NDVI9)と比べて LAI の増加に対して値が飽和しづらいため, 作物圃場における生育変化をモニタリングために適していると考えられる43). 1 4 . 2 ) ( 5 . 2 2 RED NIR RED NIR EVI 式 3-1 ここで,NIR と RED はそれぞれ,近赤外波長帯及び赤色波長帯における群落反射率で
ある.図 3-2 に示すように UAV 画像から求めた EVI2 と地上計測した LAI の間に非線
形関係が見られたことから,式 3-2 に示すように LAI 推定式として指数関数 (Exponential
Function : EF) を採用し,非線形回帰分析によって LAI 推定式を導出した.
2 1 ea2 EVI
a
LAI 式 3-2
図 3-2 反射率画像からえられた EVI2 と観測した LAI の間の関係.縦軸と横軸はそれ
ぞれ,観測した LAI と EVI2 の値を示す.EVI2 は式 3-1 で定義される植生指数
の1 つである.
b) 日射条件及び背景反射率を説明変数に加えた重回帰
オルソ補正済み反射率画像からえた群落反射率を用いて計算した植生指数に加え,撮影
時の日射条件と背景反射率 (表 3-2) も説明変数とし,地上計測した LAI を目的変数とす
る LAI 推定式を重回帰分析 (Multiple Regression : MR) によって導出した.LAI 推定式の
導出及び精度評価のいずれに対しても,全ての試験区のデータ (n = 1200) を用いた.LAI 推定式として式 3-3 に示すような線形式を採用した.なお,3.2.2 (1) a)で示したとおり LAI と EVI2 の間には非線形関係が見られたことから EVI2 には指数変換を施した. 6 5 4 3 2
1 e 2 b SOIL b SUN b DIF b
b
LAI bEVI 式 3-3
ここで,SOIL,SUN 及び DIF はそれぞれ,背景反射率,太陽天頂角及び散乱光割合で