大規模構造物組み立てにおける 複数移動ロボットの二体一組協調
大谷 雅之
電気通信大学大学院情報理工学研究科 博士(工学)の学位申請論文
2013 年 3 月
複数移動ロボットの二体一組協調
博士論文審査委員会
主査 髙玉 圭樹 教授
委員 吉浦 裕 教授
委員 中嶋 信生 教授
委員 西野 哲朗 教授
委員 梶本 裕之 准教授
著作権所有者 大谷 雅之
2013
Although the large-scale structure assembly by multiple robots has been much attention on especially in the space development, it includes the significant problem that the robots easily get into deadlock situations where they cannot avoid each other when they can only move on the frame of the structures and only acquire the local information. This problem becomes complicated to solve due to the crowd area caused by the progress of the assembly or biased distribution of the robots. Furthermore, the robots have to assemble the large-scale structure in the real-world environment where the robots speeds are different due to the individual difference and they may be broken during assembly.
To overcome this problem, this paper proposes the deadlock avoidance method among the multiple robots in the large-scale structure assembly, and verifies its effectiveness through simulations on constructing Space Solar Power Satellite (SSPS). For the first step, this paper proposes the deadlock avoidance method based on leader-follower exchange towards the environment where the robots are never crowded. For the next step, this paper proposes the deadlock avoidance method based on one-way movement of the robots towards the environment where the robots become crowded situation. Concretely, this paper reveals the followings: in the case of biased distribution, (1) the number of the robots which enables the assembly completely in the environment where the robots are the same speeds and never broken; (2) the difference between the same speeds and different speeds due to the individual difference or speed delay, the failure rate which maximize the assembly rate when the some robots are broken, and how to collect the broken robots in the environment where the robots are different speeds and may be broken; and (3) proving that the robots with the method which forces robots one-way movement can certainly avoid deadlock when the distribution of the robots are biased.
For this purpose, this paper compares the completion time and rate and recovery rate in
the dynamic environment and investigates the number of panels and robots which required to complete assembly. Intensive simulations and theoretical proof on constructing SSPS by multiple robots have revealed the following implications: (1) the robots certainly complete assembly under 61% robots of all vertexes by using this method; (2) our deadlock avoidance method based on the role exchange is effectiveness in the dynamic environment because the robots completes assembly when the speeds of robots are different or when the robots can collect broken robots and maximizes assembly under the case that 1/3 robots are broken case; and (3) it is proved that the proposed deadlock avoidance method which forces robots one-way movement enables robots to complete assembly regardless of the number of the robots and panels.
概要
近年,複数自律移動ロボットによる大規模構造物の分散組立が注目されており,
宇宙などの過酷な環境下での実用化が望まれている.しかし,大規模構造物組立 ではロボットが構造物のフレーム上しか移動出来ず,局所情報しか利用できない 場合,他のロボットとすれ違えない「デッドロック」問題が発生する.この問題 は,構造物の組立状況やロボットの偏りによって更に複雑化し,ロボットが構造 物上の一箇所に集中することで,ロボットの偏りのない場合よりもデッドロック 回避が困難な状態が発生する.また,ロボットの個体差から生じる速度差,故障 という懸念がある実環境に近い環境下の考慮も必要である.
このような背景から,本研究では,複数ロボットによる大規模構造物組立での
デッドロック回避手法の提案とその検証を目的とする.その第一段階として,ロ
ボットの偏りの無い環境下におけるデッドロック回避への対策として,二体一組
ロボットの主従関係交換手法を提案し,第二段階として,ロボットが偏る環境下
におけるデッドロック回避への対策に,ロボット移動の一方通行化に基づく主従
関係分離・結合手法を提案する.これらを大規模構造物の一例である宇宙太陽発
電衛星組立問題に適用し,全ロボット速度が均一で故障がない理想環境下,及び
ロボット間に個体差が有り,故障が発生する近実環境下において提案手法の有効
性を検証する.具体的には,(i)第一段階のロボットの偏りがない場合に,理想環
境においてデッドロック回避可能となるロボット割合を明らかにし,
(ii)近実環境において個体差や速度低下がある場合の理想環境との違い,故障時に最大限組み
立てるための故障率,故障ロボットの有効な回収方法についてそれぞれ明らかに
する.また,
(iii)第二段階のロボットに偏りがある場合に,理想環境下において構造物がほぼロボットで埋まった状態でもデッドロック回避可能であることを理論
的に証明するとともに,ロボットの速度が異なる近実環境下とみなした実機実験 において有効性を検証する.
上記を検証するため, 提案手法を宇宙太陽発電衛星組立問題に適用し,シミュ レーションにおいては,組立成功率,組立時間,及び故障時の組立成功率(リカ バリーレート)について比較し,理論検証では組立可能なロボット割合と,パネ ル枚数を調査し,実機上においても理論及びシミュレーション結果と比較した.
その結果,主従関係交換に基づくデッドロック回避手法を用いることで,ロボッ トの偏りが無い場合,(1)個体差が無く,故障しない理想環境下において全頂点の
約
61%以下のロボット数までの組立を保障でき,実際の規模におけるフィージビリティがあることを確認した.また,同手法は(2)全ロボットの速度に個体差があ る環境でも組立できることを検証し, 故障環境下では全ロボットの
3分の
1の故 障までロボット故障時の組立成功率を最大化でき,故障ロボットを回収出来る場 合は組立よりも回収を優先することが有効であることを明らかにした.さらに,
(3)移動の一方通行化と主従関係分離手法によって,ロボットの偏りによって発生
するデッドロックを解消可能であり,パネル数に関わらず組立可能であることを
理論的に証明し,実機上でも理論に従うことを検証した.
Abstract i
概要 iii
第1章 序論 1
1.1 構造物の大規模化 . . . 1
1.2 複数移動ロボット間協調手法 . . . 1
1.3 大規模構造物組立におけるデッドロック問題 . . . 2
1.4 本研究の目的 . . . 3
1.5 論文の構成 . . . 4
第2章 大規模構造物組立とデッドロック問題 7 2.1 複数ロボットによる大規模構造物の自律分散組立 . . . 7
2.2 大規模構造物組立における3つの制限とデッドロック問題 . . . 8
2.2.1 大規模構造物組立における3つの制限 . . . 8
2.2.2 デッドロック発生の要因 . . . 10
2.2.3 デッドロック状態の分類 . . . 11
2.3 大規模構造物組立手法の検証方法 . . . 13
2.4 従来手法と本研究の位置付け . . . 15
2.4.1 ロボットにおけるデッドロック回避 . . . 16
2.4.2 情報的なデッドロック回避 . . . 16
2.4.3 本研究の位置付け . . . 17
2.4.4 本研究のアプローチ . . . 18
第3章 宇宙太陽発電衛星 21 3.1 宇宙太陽発電衛星 . . . 21
3.1.1 NASAモデル . . . 22
3.1.2 ISASモデル . . . 22
vi 目次
3.1.3 USEFモデル . . . 23
3.1.4 JAXAモデル . . . 24
3.2 宇宙太陽発電衛星組み立てのモデル化 . . . 25
3.2.1 太陽発電パネル . . . 25
3.2.2 組み立てロボット . . . 25
3.2.3 パネル保管所 . . . 26
3.3 組立シーケンス . . . 26
3.4 組立のモデル化 . . . 28
第4章 主従関係に基づく二体一組ロボットによる構造物組み立て手法 31 4.1 二体一組の主従関係交換手法 . . . 31
4.1.1 提案手法におけるロボットの前提 . . . 31
4.1.2 リーダーとフォロワ . . . 32
4.1.3 ロボットの移動ルール . . . 33
4.1.4 需要度マップ . . . 34
4.1.5 主従関係交換によるデッドロック回避 . . . 39
4.1.6 提案手法による組立の流れ . . . 43
第5章 シミュレーション:二体一組の主従関係交換手法 49 5.1 概要 . . . 49
5.2 理想環境下シミュレーション:多様な構造物組立 . . . 50
5.2.1 異なるパネル形状の構造物組立 . . . 50
5.2.2 凹型構造物の組立 . . . 53
5.3 理想環境下シミュレーション:規模 . . . 55
5.3.1 シミュレーション設定 . . . 55
5.3.2 評価基準 . . . 55
5.3.3 結果 . . . 55
5.3.4 考察:組立における適切なロボット数 . . . 56
5.4 近実環境下における解析:速度低下がない場合 . . . 56
5.4.1 シミュレーション設定 . . . 57
5.4.2 評価基準 . . . 58
5.4.3 結果 . . . 58
5.4.4 考察 . . . 60
5.5 近実環境下における解析:速度低下がある場合 . . . 61
5.5.1 シミュレーション設定 . . . 61
5.5.2 評価基準 . . . 61
5.7.1 シミュレーション設定 . . . 70
5.7.2 評価基準 . . . 71
5.7.3 結果 . . . 71
5.7.4 考察 . . . 73
5.8 提案手法の性能範囲調査 . . . 75
5.8.1 単独移動手法との比較 . . . 75
5.8.2 大域通信利用との比較 . . . 77
第6章 理論:主従関係交換手法の有効範囲とロボットの偏りに基づくデッドロック 回避 81 6.1 理想環境下での二体一組の主従関係交換協調手法の有効範囲 . . . 81
6.1.1 最小パネル構成におけるデッドロック回避 . . . 82
6.1.2 各ロボット数における検証 . . . 82
6.1.3 二体一組の主従関係交換手法の有効範囲 . . . 86
6.2 ロボット偏りによるデッドロック回避手法 . . . 88
6.2.1 ロボット偏りによるデッドロック問題 . . . 88
6.2.2 移動マップと主従関係分離に基づくロボット移動 . . . 89
6.2.3 証明:六角形パネルを用いた一方通行化手法によるデッドロック回避 . 95 6.2.4 証明:四角形・三角形パネルにおけるデッドロック回避 . . . 112
6.2.5 実機検証 . . . 123
第7章 設計論:提案手法の一般的な構造物組立への適用 131 7.1 平面に基づく構造物の組立への適用 . . . 131
7.2 構造物の規模 . . . 132
7.3 超高密度環境下でのデッドロック回避 . . . 132
7.4 協調作業におけるペア行動の利点 . . . 133
7.5 故障に対するロバスト性 . . . 133
7.6 実機ロボットへの適用 . . . 133
viii 目次
第8章 結言 135
8.1 おわりに . . . 135 8.2 今後の課題 . . . 137
謝辞 139
参考文献 141
2.1 移動の制限 . . . 8
2.2 組立初期のロボットの偏り . . . 10
2.3 組立場所における一時的な偏り . . . 10
2.4 デッドロック状態 . . . 11
2.5 対称移動デッドロック . . . 12
2.6 対称移動デッドロック(対称形) . . . 13
2.7 対称移動デッドロック(非対称形) . . . 14
2.8 閉塞デッドロック . . . 14
3.1 NASA Reference System [DOE/NASA, 1978] (C) NASA . . . 22
3.2 Sun Tower [Mankins, 2002] (C) NASA . . . 22
3.3 Integrated Symmetric Concentrator(ISC) [DOE/NASA, 1980] (C) NASA 23 3.4 SPS2000 (C) ISAS . . . 23
3.5 USEFモデル (C) USEF . . . 24
3.6 JAXAモデル (C) JAXA . . . 24
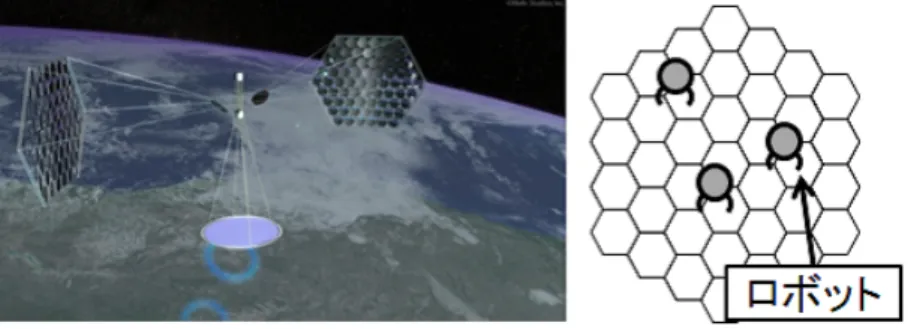
3.7 (左)宇宙太陽発電衛星(SSPS) (C)Mafic Studios, Inc. (右)簡略化したSSPS モデル . . . 25
3.8 (左上)インフレータブル・テンセグリティ [Murata, et al., 2005] (右下) ロ ボットによるパネルの運搬 . . . 26
3.9 アーム式ロボットによるフレームの移動[上野 ほか, 2007] . . . 26
3.10 SSPS組み立てにおけるパネル保管所(ロケット発着所) . . . 27
3.11 組立シーケンス . . . 28
3.12 組立の経過 . . . 28
3.13 六角形パネルを用いた平面構造物 . . . 29
3.14 三角形パネルを用いた平面構造物 . . . 29
3.15 四角形パネルを用いた平面構造物 . . . 29
3.16 六角形,三角形,四角形を用いた平面構造物 . . . 29
x 図目次
4.1 ロボットの通信可能範囲 . . . 32
4.2 ルール1:目的地との距離に基づく頂点選択 . . . 35
4.3 ルール2:選択頂点にロボットが居る場合. . . 35
4.4 ルール3:同一頂点への移動の回避 . . . 35
4.5 ルール4:目的地パネル上での移動 . . . 36
4.6 (左)完成マップ (右)需要度マップ . . . 36
4.7 ロボット間での需要度マップ交換 . . . 37
4.8 需要度に基づく方法(左) 距離に基づく方法(右) . . . 38
4.9 主従関係交換条件A . . . 40
4.10 主従関係交換条件B . . . 40
4.11 主従関係交換条件C . . . 40
4.12 組立の流れの例:t=0〜3 . . . 45
4.13 組立の流れの例:t=4〜7 . . . 46
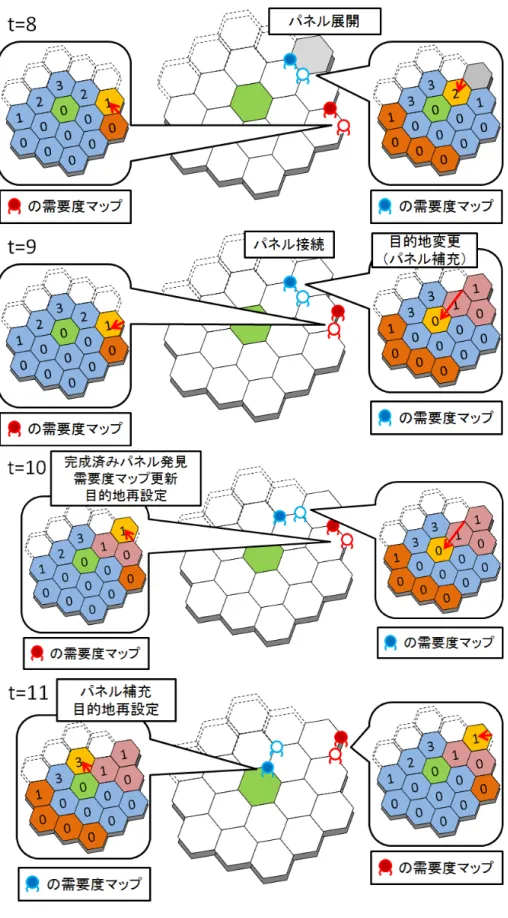
4.14 組立の流れの例:t=8〜11 . . . 47
5.1 4層の六角形パネルの構造物 . . . 51
5.2 4層の四角形パネルの構造物 . . . 51
5.3 4層の三角形パネルの構造物 . . . 51
5.4 六角形パネルの平均組立時間 . . . 52
5.5 四角形パネルの平均組立時間 . . . 52
5.6 三角形パネルの平均組立時間 . . . 53
5.7 凹型構造物 . . . 54
5.8 凹型構造物において直線距離で目的地設定する場合のデッドロック . . . 54
5.9 凹型構造物の平均組立時間 . . . 54
5.10 平均組立時間:4層の構造物 . . . 56
5.11 平均組立時間:8層の構造物 . . . 56
5.12 平均組立時間:16層の構造物 . . . 56
5.13 層数に対するロボット数の増加 . . . 57
5.14 パネル枚数に対する最小平均組立時間の増加 . . . 57
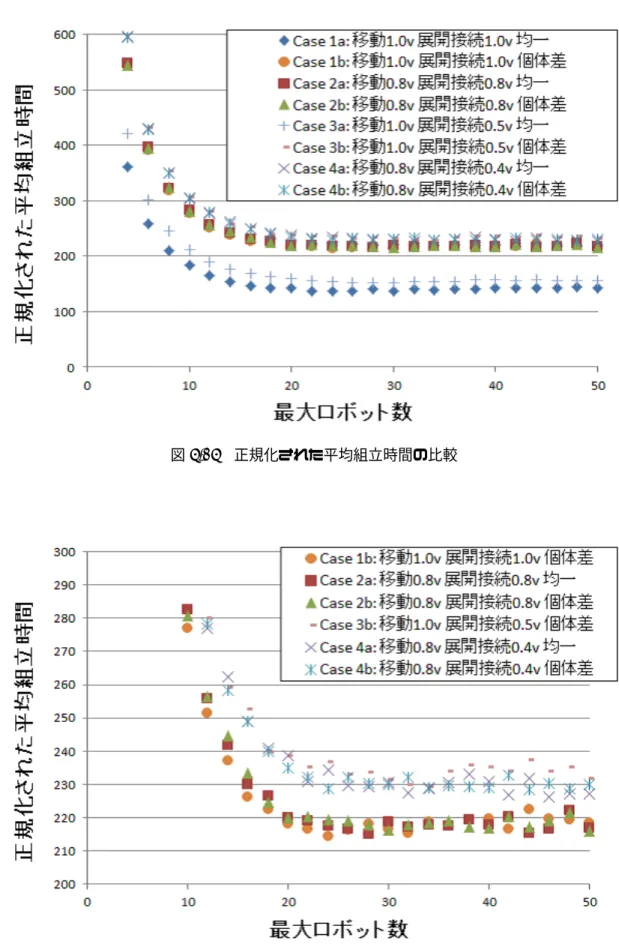
5.15 正規化された平均組立時間の比較 . . . 59
5.16 正規化された平均組立時間の比較(拡大) . . . 59
5.17 離散均一の挙動(左)実数均一の挙動(右) . . . 60
5.18 正規化された平均組立時間の比較 . . . 63
5.19 正規化された平均組立時間の比較(拡大) . . . 63
5.20 正規化された平均組立時間の比較(Case 1) . . . 64
5.21 正規化された平均組立時間の比較(Case 2) . . . 64
5.30 平均組立時間:(上)組立優先(Case 2)(下)回収優先(Case 3) . . . 74
5.31 組立優先手法を用いた場合のデッドロック . . . 74
5.32 (左)組立優先と(右)回収優先の移動 . . . 75
5.33 単独行動手法と提案手法の平均組立時間の比較 . . . 77
5.34 主従交換無しの大域通信と提案手法の比較:組立成功率 . . . 78
5.35 主従交換無しの大域通信と提案手法の比較:平均組立時間 . . . 78
5.36 主従交換有りの大域通信と提案手法の比較:平均組立時間 . . . 79
5.37 局所情報利用の場合の最後の周回移動 . . . 79
6.1 パネル保管所とパネル外周部の往復移動 . . . 83
6.2 デッドロック状態の定義 . . . 83
6.3 ロボットの初期配置:2組 . . . 84
6.4 2組ケース1におけるロボットの移動 . . . 85
6.5 ロボットの初期配置:3組 . . . 86
6.6 3組ケース1におけるロボットの移動 . . . 87
6.7 ロボットの初期配置:4組 . . . 87
6.8 ロボットの初期配置:5組 . . . 88
6.9 5組ケース1で発生したループ状態 . . . 88
6.10 ボトルネック構造物におけるロボット偏りにより発生するデッドロック状態. 89 6.11 頂点1箇所以外がロボットで埋まっている状態 . . . 89
6.12 回転パネルと非移動パネルに向き付けられたSSPS完成図 . . . 91
6.13 移動マップを利用した主従関係手法によるデッドロック . . . 93
6.14 初期状態 . . . 94
6.15 空頂点にロボットが移動 . . . 95
6.16 空頂点が合流地点まで移動 . . . 95
6.17 待機時間を比較:待機時間が長い上のロボットが移動 . . . 95
6.18 移動したロボットの待機時間のみ0になる . . . 95
6.19 ロボットの割り込みによる分離と結合 . . . 95
xii 図目次
6.20 組立不可能な例 . . . 96
6.21 二つの組立可能な構造物の組み合わせ . . . 97
6.22 N=2枚の構造物 . . . 99
6.23 N=2枚の構造物における空頂点の移動 . . . 99
6.24 N=3枚時の構造物 . . . 99
6.25 N=3枚時の構造物における空頂点の移動 . . . 99
6.26 N=4枚時の構造物 . . . 100
6.27 N=4枚時の構造物における空頂点の移動 . . . 100
6.28 N=5枚時の構造物 . . . 100
6.29 2枚及び3枚のパネルで構成される構造物における空頂点の移動.(左)頂点 aから頂点bへの空頂点の移動.(右)頂点bから頂点aへの空頂点の移動. 101 6.30 N枚パネル外周の2枚パネルの構造物. . . 102
6.31 N枚パネル外周の3枚パネルの構造物. . . 102
6.32 N枚パネル外周の4枚パネルの構造物. . . 102
6.33 Case 1: 接続部2枚に展開する場合 . . . 103
6.34 Case 2a: 接続部3枚の上部に展開する場合 . . . 103
6.35 Case 2b: 接続部3枚の中部に展開する場合 . . . 103
6.36 Case 2c: 接続部3枚の下部に展開する場合 . . . 103
6.37 Case 3: 接続部4枚に展開する場合 . . . 103
6.38 Case 1-1: 展開部に隣接するパネルが隣接しない場合 . . . 104
6.39 Case 2-1: 展開部に隣接するパネルが2枚の場合 . . . 104
6.40 Case 3-1: 展開部に隣接するパネルが3枚の場合 . . . 104
6.41 Case 4-1: 展開部に4枚1組のパネルが隣接する場合 . . . 104
6.42 Case 5-1: 展開部に2枚2組(合計4枚)のパネルが隣接する場合 . . . 104
6.43 Case 1-2a: 展開部に隣接するパネルが隣接しない場合 . . . 105
6.44 Case 2-2a: 展開部に隣接するパネルが2枚の場合 . . . 105
6.45 Case 3-2a: 展開部に隣接するパネルが3枚の場合 . . . 105
6.46 Case 4-2a: 展開部に4枚1組のパネルが隣接する場合 . . . 105
6.47 Case 5-2a: 展開部に2枚2組(合計4枚)のパネルが隣接する場合 . . . 105
6.48 Case 1-2b: 展開部に隣接するパネルが隣接しない場合 . . . 106
6.49 Case 2-2b: 展開部に隣接するパネルが2枚の場合 . . . 106
6.50 Case 3-2b: 展開部に隣接するパネルが3枚の場合 . . . 106
6.51 Case 4-2b: 展開部に4枚1組のパネルが隣接する場合 . . . 106
6.52 Case 5-2b: 展開部に2枚2組(合計4枚)のパネルが隣接する場合 . . . 106
6.53 Case 1-2c: 展開部に隣接するパネルが隣接しない場合 . . . 107
6.54 Case 2-2c: 展開部に隣接するパネルが2枚の場合 . . . 107
6.63 回転パネル13枚の SSPSにおける空頂点のS字移動の様子.(左)頂点 cか ら頂点aへの空頂点の移動.(右)頂点aから頂点bへの空頂点の移動.(下)
頂点bから頂点cへの空頂点の移動.. . . 110
6.64 回転パネル 13枚のSSPS における空頂点の余分な移動.(左)頂点cから頂 点a手前までの空頂点の移動.(右)頂点dを通って頂点bまでの空頂点の移 動.(下)頂点bから頂点cへの空頂点の移動. . . . 111
6.65 ハンドシミュレーションによる主従関係交換手法と一方通行化手法の比較 . . 112
6.66 N個の組立可能な構造物の組み合わせ . . . 114
6.67 N=2枚時の構造物 . . . 115
6.68 N=2枚時の構造物における空頂点の移動 . . . 115
6.69 N=3枚時の構造物.(左)長方形.(右)L字形.. . . 115
6.70 N=3枚時の構造物における空頂点の移動ループ(長方形) . . . 115
6.71 N=3枚時の構造物における空頂点の移動ループ(L字形) . . . 116
6.72 N=4枚時の構造物 . . . 116
6.73 N=4枚時の構造物における空頂点の移動 . . . 116
6.74 N=5枚時の構造物 . . . 117
6.75 N=5枚時の構造物における空頂点の移動 . . . 117
6.76 N=2枚時の構造物 . . . 117
6.77 N=2枚時の構造物における空頂点の移動 . . . 117
6.78 N=3枚時の構造物 . . . 117
6.79 N=3枚時の構造物における空頂点の移動 . . . 118
6.80 N=4枚時の構造物 . . . 118
6.81 N=4枚時の構造物における空頂点の移動 . . . 118
6.82 N枚パネル外周の2枚パネルの構造物. . . 119
6.83 N枚パネル外周の3枚パネルの構造物(L字形) . . . 119
6.84 N枚パネル外周の3枚パネルの構造物(長方形) . . . 119
6.85 N枚パネル外周の4枚パネルの構造物. . . 119
6.86 N枚パネル外周の5枚パネルの構造物. . . 119
xiv 図目次
6.87 Case 1a: 接続部2枚の➀に展開する場合 . . . 120
6.88 Case 1b: 接続部2枚の➁に展開する場合 . . . 120
6.89 Case 2-1a: 接続部3枚(長方形)の➀に展開する場合 . . . 120
6.90 Case 2-1b: 接続部3枚(長方形)の➁に展開する場合 . . . 120
6.91 Case 2-2c: 接続部3枚(長方形)の➂に展開する場合 . . . 120
6.92 Case 2-2a: 接続部3枚(L字形)の➀に展開する場合 . . . 121
6.93 Case 2-2b: 接続部3枚(L字形)の➁に展開する場合 . . . 121
6.94 Case 2-2c: 接続部3枚(L字形)の➂に展開する場合 . . . 121
6.95 Case 2-2d: 接続部3枚(L字形)の➃に展開する場合 . . . 121
6.96 Case 3a: 接続部4枚の➀に展開する場合 . . . 121
6.97 Case 3b: 接続部4枚の➁に展開する場合 . . . 121
6.98 Case 3c: 接続部4枚の➂に展開する場合. . . 121
6.99 Case 3d: 接続部4枚の➃に展開する場合 . . . 121
6.100 Case 3e: 接続部4枚の➄に展開する場合. . . 121
6.101 Case 4a: 接続部5枚の➀に展開する場合 . . . 122
6.102 Case 4b: 接続部5枚の➁に展開する場合 . . . 122
6.103 N枚パネル外周の2枚パネルの構造物. . . 122
6.104 N枚パネル外周の3枚パネルの構造物(L字形) . . . 122
6.105 N枚パネル外周の4枚パネルの構造物. . . 123
6.106 Case 1: 接続部2枚の➀に展開する場合 . . . 124
6.107 Case 3: 接続部4枚の➀に展開する場合 . . . 124
6.108 Case 2a: 接続部3枚(長方形)の➀に展開する場合 . . . 124
6.109 Case 2b: 接続部3枚(長方形)の➁に展開する場合 . . . 124
6.110 Case 2c: 接続部3枚(長方形)の➂に展開する場合 . . . 124
6.111 対向二輪型の実機ロボット . . . 125
6.112 実機実験において利用するマップ . . . 125
6.113 実機実験の例 . . . 125
6.114 1回目の分岐 . . . 128
6.115 2回目の分岐 . . . 128
6.116 初期配置と番号の対応 . . . 129
6.117 9ステップ目の実機の状態 . . . 129
6.118 5ステップ目の状態 . . . 129
6.119 10ステップ目の状態 . . . 129
6.120 ロボット3番が1番よりも先に到着する場合 . . . 129
2.1 本研究の位置付け . . . 18
2.2 従来手法と本研究の要素比較 . . . 18
2.3 本研究の課題 . . . 19
4.1 需要度マップによる移動位置決定アルゴリズム . . . 38
4.2 主従関係交換によるデッドロック回避手法 . . . 42
5.1 本研究の課題 . . . 49
5.2 シミュレーションケース . . . 51
5.3 パネル形状の設定 . . . 51
5.4 構造物規模の設定 . . . 55
5.5 シミュレーションケース . . . 58
5.6 シミュレーションケース1 . . . 61
5.7 シミュレーションケース2 . . . 62
5.8 シミュレーションケース . . . 70
5.9 シミュレーションパラメータ . . . 71
5.10 単独行動手法と提案手法の比較 . . . 76
5.11 シミュレーションケース . . . 78
6.1 本研究の課題 . . . 81
6.2 合流地点に移動するロボットの待機時間の遷移 . . . 98
6.3 N枚のSSPS外周に1枚追加する際の場合分け . . . 102
6.4 N個の構造物が隣接する合流地点に移動するロボットの待機時間の遷移 . . . 114
6.5 N枚のSSPS外周に1枚追加する際の場合分け:四角形 . . . 120
6.6 N枚のSSPS外周に1枚追加する際の場合分け:三角形 . . . 122
6.7 各種パラメータ . . . 126
6.8 各ロボットの速度 . . . 127
6.9 実験ケース . . . 127
1
第 1 章
序論
1.1 構造物の大規模化
近年,人類が建造する構造物は大規模化の一途を辿っている.1998年に完成したペトロナ ス・ツインタワーは当時世界一高い超高層ビルだったが,2003年には台北101に抜かれ,そ の台北101も2007年にはブルジュ・ハリファが取って代わった.2012年時点では,このブル ジュ・ハリファよりも更に高く,高さ1km以上の超高層ビルが多数計画されている.大規模構 造物は,超高層ビルだけではない.丹陽-昆山特大橋は2010年に竣工した現在の世界最長の橋 だが,その長さは164kmに渡る.また,300mという現在世界最大堤高のダムであるヌレーク ダムも,2012年時点で建設中のログンダムが堤高335mで世界一となる予定である.ここ数十 年単位で建造が構想,検討されている構造物については特に規模が大きい.最近では,チェル ノブイリ原子力発電所や,福島第一原子力発電所に代表される原子力事故の問題を受け,原子 力以外に取って代わるエネルギー資源が必要とされているが,その一つとして,様々な宇宙研 究機関で構想中の宇宙太陽発電衛星(Space Solar Power Satellite: SSPS)[Glaser, 1968]があ る.これは大量の太陽発電パネルを持った衛星を地球軌道上に設置し,マイクロ波やレーザー で地上に送電するという衛星だが,その直径は数キロメートルオーダーである大規模な構造物 である.また,宇宙への物資輸送の観点で構想されている軌道エレベータ[Isaacs, et al, 1966]
は,最低でも地上から静止軌道まで,すなわち36,000km以上の大きさが必要となる.
1.2 複数移動ロボット間協調手法
構造物の大規模化により,これまでの人手による組立方法による建造の見直しが求められ る.まず,構造物の規模が大きくなるほど,組立に要する人員とその工期は非常に長くなり,
高コストである.また,大規模であるため,事故の危険性が非常に高く,特に宇宙や海洋,砂 漠といった過酷な環境下では人手による作業自体が危険であり,大量の人員を用いての作業は 現実的ではない.したがって,複数の移動ロボットを用いた組立が注目されている.移動ロ
央に集め,その熱でタービンを回す.複数ロボットを用いてこのような砂漠地帯に平面的に広 がる構造物を組立る場合,砂や熱によるロボットの故障に対してロバストな手法が必要である.
これには,文献 [Jian, et al, 2010]の複数ロボットのフォーメーションによる協調狭路通行,
文献 [Yamada, 2011]の強化学習を用いた狭路通行手法,文献[Dakulovic, 2011]のロボット が人間や動物のような移動物体が存在する環境下で狭路すれ違いをする手法,などの利用が有 効である.また,文献[Terada et al., 2008]では,自律行動モジュラ構造物を用いた構造物の 組立手法が提案されており,橋などの自動組立への適用が期待されている.直接の構造物上で の作業ではないが,部材の仮組み上げをする材料搬送プラント内において作業ロボットの移動 を最適化する手法もあり,文献[小泉 ほか,2010]や文献[星野 ほか,2010][星野 ほか,2011]
などの材料搬送プラント内で発生する渋滞の解消に適用出来る例がある.更には,文献 [山下 ほか,2002]ではロボットが協調して三次元物体搬送をする例を扱っている.
1.3 大規模構造物組立におけるデッドロック問題
自律行動できない構造物パネルを複数自律移動ロボットを用いて構造物を現地で組み立てる 形式の大規模構造物組立では,ロボットの進行方向に他のロボットが存在することによって移 動が阻害される「デッドロック」という問題が発生する.これは,構造物上を移動する組立ロ ボットが (i)構造物のフレーム上しか移動出来ず,すれ違い可能なスペースがないこと,(ii)す れ違いが出来ないときに有効な荷物の受け渡しは高精度の制御が要求され,ハードウェアが複 雑になり故障の危険性の増大やロボットの質量の増加を招くこと,そして (iii) 大域通信を利 用しての情報集約はできず,局所通信が求められること(例えば,中央ドックなどの集約先の モジュールが故障するとロボットのスケジューリングが出来なくなるため,どのモジュールが 壊れても組立に影響がないフェイルセーフな制御が必要である),という三つの制限により発 生している.特に,(iii)の通信制限によってロボット同士は接近するまでお互いの存在を認識 することが出来ず,(i)の移動制限により接近してからではすれ違うことが出来ない.更に(ii) の機能制限により接近してから荷物受け渡しも出来ないため,容易にデッドロック状態に陥 る.前項で紹介したロボット協調手法は,このような制限環境下に適用することが出来ず,こ れらの制限環境下でも,ロボットがデッドロックに陥らず組立が出来る手法が求められる.
1.4 本研究の目的 3
1.4 本研究の目的
上記の問題に対し,本研究では,異なる役割を有する二体一組のロボットの主従関係に基づ くデッドロック回避手法を提案し,大規模構造物の一例であるSSPS の組立問題に適用する ことで,その効果を明らかにする.この手法は,構造物のフレーム上を移動する二体一組のロ ボットが,荷物受け渡しなどの新たなハードウェアを導入せず,主従関係の交換,分離,及び 結合というソフトウェア上の変更のみでデッドロック状態を回避する.具体的には,シミュ レーション・理論・実験という三つの観点から,以下の三段階について,提案手法の有効性を 検証する.まず,(1)第一段階として,主従関係の交換によりデッドロックを回避する手法を 提案し,ロボットの移動や組立速度が均一で,故障のない理想的なシミュレーション環境下で 提案手法の有効性を検証し,理論的な見地から提案手法が有効となるロボット割合を調査する ことで,その有効範囲を明らかにする.これにより,理想的な環境下での組立手法の確立を目 指す.(2)第二段階として,主従関係交換手法を全てのロボットの速度が個体ごとに異なり,
故障の可能性を含む近実環境下に適用し,そのロバスト性を検証する.これにより,個体差が ある場合の組立における有効性と,ロボットが故障する環境下で手法の効果を最大化するため の条件を明らかにし,故障に対してロバストなロボットを設計するための指標を明らかにす る.更に(3)主従関係交換手法では,ロボットが偏る場合に,組立が出来ない場合が存在する ため,ロボットの偏りによってロボットが一箇所に集中する状態や,元々のロボット数が多い 場合は組立が出来なくなる可能性がある.ロボットが偏る場合には,数回の移動行動だけでは 解決が困難であり,ロボットの移動方向をある程度決める必要がある.したがって,第三段階 として,構造物上でのロボットの移動方向を一方通行化する手法を提案し,ロボットの偏りに よって密集している場合でも組立可能であることを理想環境下を前提とした証明と実機実験の 両方の観点から検証する.これにより,理想環境下でいかなるロボット数でいかなるパネル枚 数でも組立られる手法を確立するとともに,近実環境下への適用可能性を検証する.
上記の目的のため, 本研究では提案したデッドロック回避手法を大規模構造物の一例である SSPSの組立問題に適用する.具体的には, シミュレーション上で故障のない環境下では組立 成功率と組立時間, 故障のある環境下ではこれらに加えてロボットが故障した場合の組立成 功率を示すリカバリーレートを比較する.理論証明においては,数学的帰納法の概念を用い て,提案手法を用いて任意の枚数のパネルを組立可能であることを証明する.これらの検証に より,以下の事項を明らかにする.
• 故障や個体差のない環境下で提案手法を用いた場合,デッドロック回避可能なロボット 割合を理論的に算出することで提案手法の有効範囲を明らかにする
• ロボットの速度が異なる個体差環境においても提案手法を用いて組立可能であることを 明らかにし,ロボットが故障する環境下で組立を最大化するためのロボットの故障確
本論文の構成は以下の通りである.
まず,第2章では,これまでの構造物組立に適用可能なロボット協調手法を紹介する.そし て,本研究が対象とする大規模構造物組立の特性により発生するデッドロック問題について説 明し,従来手法を大規模構造物のロボット分散協調組立に適用する際の困難である点を述べ,
本研究で解決する問題を明らかにすることで,本研究の立ち位置を明らかにする.
次に第3章では,大規模構造物組立問題の一例として,本研究で取り扱う宇宙太陽発電衛星 の概要と,その代表的なモデルを紹介する.また,組立に利用するパネル及びロボットにおい ても現在提案されているモデルについて述べ,本研究で用いる大規模構造物組立モデルについ て説明する.
第4章では,提案する二体一組のロボットの主従関係交換に基づくデッドロック回避手法に ついて説明する.具体的には,パネルの展開と接続という二種類の役割のロボットを二体一組 で行動させ,ロボットが移動する目的地の設定方法と,移動ルールを説明し,デッドロックが 発生した場合の動作を説明する.
第5章では,二体一組の主従関係交換手法の有効性をシミュレーションにより検証する.具 体的には,ロボットに速度差が無く,故障しない理想環境下で比較したのち,近実環境下での 検証として,ロボットの速度に差がある場合と,ロボットが故障する環境それぞれでシミュ レーションを用いて比較する.
第6章では,二体一組の主従関係交換手法の有効範囲について調査し,提案手法が有効と なるロボット割合を明らかにする.更に,構造物形状や組立初期に起因するロボットの偏りに よって発生するデッドロック問題について,各辺でのロボットの移動方向を一方通行化するこ とでデッドロックを回避する手法を提案し,その有効性を数学的帰納法により証明する.ま た,実問題への適用を目指し,対向二輪ロボットを用いて提案手法の有効性を示す.
第7章では,第5章と第6章の成果から,提案手法を一般的な大規模構造物組立に適用する 際の条件,組立可能な構造物,その他ロボットの設計についてまとめる.具体的には,平面充 填問題に基づいて定義した三角形パネルを用いることによって,全ての平面を構成可能である ことを示すとともに,立体構造物は平面構造物の応用であることを述べる.
最後に,第8章で上記の各章で得られた知見についてまとめ,これらの知見から導かれる
1.5 論文の構成 5 本研究の成果について述べる.更に,今後実際の大規模構造物組立に適用する上での課題を述 べ,本論文の結びとする.
問題
2.1 複数ロボットによる大規模構造物の自律分散組立
近年では,建造技術の発達とともに,徐々に建造される構造物は大規模化しており,1km近 く,更にはそれを超える構造物の建設も計画されている.
これにともない,宇宙や深海など,以前では組立ることが出来なかった場所への組立も計画 されている.例えば,宇宙においては宇宙太陽発電衛星などの建造があげられる.このような 構造物の組立においては,(1)構造物は非常に巨大であるため,組立に導入される人員数は非 常に多くなり,人件費等のコストが膨大になり,周囲環境に与える影響が懸念され,また(2) 巨大な構造物上の作業は危険をともない,特に宇宙のように人体にとって過酷な環境下での組 立は極めて困難である.これらの理由により,組立においては複数の移動ロボットの利用が注 目されている.
しかし,複数の移動ロボットを用いた組立においても,様々な問題がある.特に,システム の修理が困難な極限環境下での組立においては,全ロボットを中央サーバを用いて集中制御す る場合,中央サーバの故障時にロボットを制御出来なくなるため,運用が困難であり.また,
各ロボットをスケジュール化して組立る場合も故障の影響があり,ロボット故障時にロボット 間で情報共有した後に再スケジューリングしなければならないが,これには全てのロボット間 で同時に同じ情報を共有する必用がある.これは,ロボット数が少なく,ロボット単体の通信 処理による負荷が小さい場合は可能だが,大規模構造物組立においてはロボット数が非常に多 いため,この通信処理による負荷による通信の遅延や情報の欠損が発生し,すべてのロボット が同じ情報を同時に持つことは保障できない.
したがって,大規模構造物組立においては,近傍情報と局所的な通信を利用するロボットを 用いた,自律分散制御による組立が着目されている.自律分散制御において,ロボットは自ら の周囲情報のみを利用するため,あるロボットが故障しても,システム全体が止まることはな
8 第2章 大規模構造物組立とデッドロック問題 く,ロボットの再スケジュールをする必用もない.しかし,自律分散組立を利用した場合に は,次項で述べる「デッドロック」が最大の問題となる.
2.2 大規模構造物組立における 3 つの制限とデッドロック問題
2.2.1 大規模構造物組立における 3 つの制限
大規模構造物組立問題において,複数移動ロボットを用いた自律分散制御を利用する場合,
ロボットが他ロボットの移動を妨げて組立に支障を与える「デッドロック」という問題が発生 する.これは,大規模構造物組立においてロボットが受ける制限により発生する.以下にそれ らの制限について説明する.
■移動の制限
ロボットが大規模構造物表面を移動する際には,ロボットが把持可能なフレーム,もしくは レール上を移動出来るような構造が必要である.特に,小さなモジュールの組み合わせによっ て作られる大規模構造物においては,それらの接続面にフレームやレールを設置することが必 要となる.しかし,フレームやレール上の移動では,お互いにすれ違うだけの十分な空間が少 なく,容易にデッドロックに陥る.
しかし,フレームやレール上の移動では, お互いにすれ違うだけの十分な空間が少なく,容 易にデッドロックに陥る. 図2.1は大規模構造物の一部を断面図で示したものであり, この図 では構造物上を移動するロボット同士が相対している. 図中の横長の円柱は構造物のフレーム を, 平行四辺形は構造物の表面を表わし, 中央にロボットが二台向かい合っている.この状態 では,レール形式のロボットではすれ違い不可能であり,アーム形式のロボットでは互いのロ ボット上を移動可能な設計にする必要があるが,その場合はより精密な機構が必要となる.し かし,これは次項で説明する機能の制限により利用することは出来ない.
図2.1 移動の制限
ではない.
■通信の制限
複数ロボットの制御方法として,大域通信を利用して全ロボットのスケジューリングや監視 を中央のサーバが行う方法が考えられる.しかし,長期的な工期を必要とする大規模構造物組 立においては,サーバやロボットが故障しないことも,大域通信の情報が常に正しいことも完 全には保障できない.特にサーバが故障するとロボットの指示が出来なくなり,宇宙・深海・
原子炉内などロボットやサーバの修理が困難な環境においては致命的である.
また, 中央サーバを用いず, 全てのロボット同士で大域的に通信する形態の利用も考えられ,
文献[Matsumoto, 1990]の空き無線チャネルを通信するロボットに割り当てる手法や,文献
[スパルークら, 1991]のトークンリングに基づいて通信する手法,文献 [Wang, et al., 1996]
や[矢向 ほか,1994]等の,独自の分散制御ロボット通信プロトコルを提案している例などが ある.しかし,これらはいずれもチャネル割り当ての計算量や,パケットの衝突・干渉による 通信量の増大から,多くとも10台程度のロボット数まで有効な方法であり,100台単位のロ ボットが存在する構造物組立では現実的ではない.
したがって,通信量を抑え,耐故障性のある通信方式として,ロボットが近傍ロボットのみ と通信し,局所情報から自律的に組み立てる手法が必要となる.文献[吉田 ほか,1998]では,
多数の移動ロボット間で局所通信をする際にパケットの衝突等を考慮し,情報伝達速度の観点 から局所通信における有効なロボット数について検証している.この文献において吉田らは,
局所通信において最も効率よく情報伝達が出来るロボット数は10台程度であると報告してい る.これに基づき,本研究では近傍10台程度のロボットが局所的に通信可能である環境を前 提とする.
しかし,局所通信のみを利用するシステムの場合,ロボット同士は接近するまでお互いの存 在を認識することが出来ず,(i)の移動制限により隣接してからではすれ違う事が出来ず(すれ 違う空間がなく),(ii)の機能制限により荷物受け渡しも出来ないため,容易にデッドロック状 態に陥る.この影響から,デッドロックが発生する前に片方のロボットが待機または減速し,
もう片方が通り過ぎるのを待つ,という予備情報が必要な回避方法をとることはできない.
10 第2章 大規模構造物組立とデッドロック問題
2.2.2 デッドロック発生の要因
前述したロボットの制限によって発生するデッドロックは,大規模構造物組立における様々 な要因によって更に発生しやすくなり,回避が困難になる場合もある.以下にデッドロック発 生の要因となる事項を述べる.
2.2.2.1 実環境下で考慮すべき問題
実際の大規模構造物組立においては,様々な実環境要因が外乱となってロボットの動作を妨 げる.ロボットにおいては,主に以下の二つが挙げられる.
■ロボットの個体差による速度の違い
移動ロボットにおいては,個体差によって移動や組立にかかる時間がロボット毎に異なる.
これは,ロボットのに部品毎に生じる誤差や,構造物の組立をする環境における温度や湿度な どの外乱による影響が関係する.ロボットの個体差毎に差がある場合は,理想的な速度で検証 した手法が適用可能かどうか不明である.
■ロボットの故障による停止
ロボットが故障しないことを保証することは困難であり,通常全てのロボットは運用してい る限り,故障の懸念がある.ロボットが故障すると,故障ロボットが組立タスクを達成出来な いだけではなく,構造物上のフレーム上で停止するため,他ロボットの進路を完全に塞ぎ,移 動制限の影響が更に大きくなる.
2.2.2.2 組立におけるロボットの偏り
構造物組立特有の問題として,構造物が組立途中で形状変化することによりロボットの偏り が発生するというものがある.これは,図2.2のような組立初期の足場が少ないときや,構造 物形状がボトルネックである場合,または図2.3のようなパネルを組み立てる場所における一 時的な偏りという要因によって発生する.このロボットの偏りによって,一時的にロボットが 密集した場所ができ,最悪の場合この密集した場所からロボットが動けず組立が停止する.
図2.2 組立初期のロボットの偏り 図2.3 組立場所における一時的な偏り
が異なる.以下にその種類を分類する.
図2.4 デッドロック状態
2.2.3.1 ロボットの偏りが無い場合に発生するデッドロック
■対称移動デッドロック
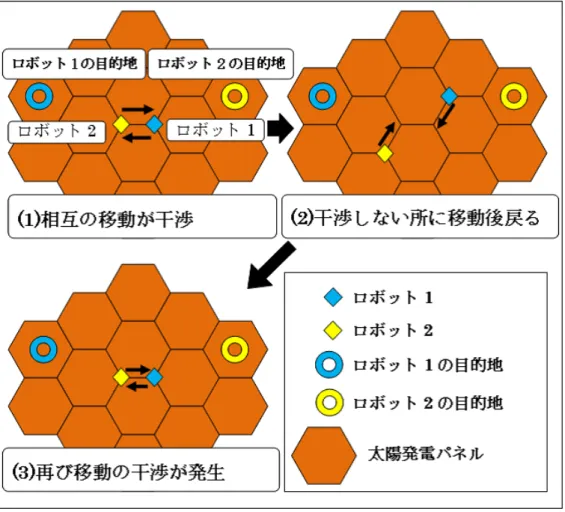
デッドロック状態にはロボットの移動が完全に止まる場合とは別に,ロボットが対称的な移 動を繰り返すことで結果的に組立が停止する対称デッドロック状態が存在する. 図2.5は対称 デッドロックの例であり,この図のように(1)相互のロボットの移動が重なった場合に,(2) 移動の干渉がなく,目的地に最も近い方向に移動するが,双方同じ法則で移動しているため (3)のように再び相互干渉が起きる. このデッドロック状態は左右の移動に優劣がないため発 生する.
■反復移動デッドロック
反復移動デッドロックは対称移動デッドロックに似ているが,移動してもロボットの目的地 が変化しないことが原因で,デッドロック状態を抜けた後に再びデッドロック状態に陥り,こ れを繰り返す状態である.図2.6及び図 2.7が反復移動デッドロックであり,前者は対称形で 対称移動デッドロックに派生する場合がある.後者は非対称形であり,対称移動デッドロック を兼ねることはない.この図でも対称移動デッドロックのように, (1)相互のロボットの移動
12 第2章 大規模構造物組立とデッドロック問題
図2.5 対称移動デッドロック
が重なった場合は,(2)移動の干渉がなく,目的地に最も近い方向に移動するが,ここですぐ に元居た場所に戻ると(3)のように再び相互干渉が起き,これを繰り返すことで結果的に組立 が停滞する.
2.2.3.2 ロボットの偏りによって発生するデッドロック
■閉塞/完全閉塞デッドロック
構造物上のロボットの偏りによって構造物上の一部にロボットが密集することで発生する デッドロックは,基本的にはロボットの周囲が全て囲まれた図2.8の状態である.図中央の青 いロボットは周囲三方向を黒いロボットに移動が阻害されている. この青いロボットは周囲 の黒いロボットが移動して移動可能な空間が出来るまで移動出来ない.本研究では,この状態 で,黒ロボットの外側も全てが埋まっており,移動が不可能である状態を「完全閉塞デッド ロック」,黒ロボットが外側に移動出来る状態を「閉塞デッドロック」と呼ぶ.どちらの状態 も,解消が困難だが,閉塞デッドロックにおいては,時間はかかるが最終的には解消される.
しかし,完全閉塞デッドロックについては,全てのロボットが移動不可能であるため,事実上 解消不可能である.これらの発生頻度及び解消し易さは構造物上のロボット数に依存するが,
図2.6 対称移動デッドロック(対称形)
ロボット数が増加するほど解消は困難である.
2.3 大規模構造物組立手法の検証方法
大規模構造物組立問題は,今現在存在する構造物を組み立て問題ではなく,近い将来に組み 立てが予定される構造物を組み立てる問題であり,不確定要素が非常に多い.工学的な手法の 検証としては,シミュレーション,理論,実機という検証方法が代表的だが,大規模構造物組 立手法を各方法で検証する上では,それぞれに有用性と問題点が存在する.以下に,それぞれ の検証方法について詳しく述べる.
■シミュレーション
宇宙太陽発電衛星に代表されるように,大規模構造物は非常に危険な環境下での組立とな る.例えば,SSPSが組立られる宇宙空間では急激な温度の変化や太陽風などによる速度低下 や停止など,組立ロボットは様々な影響を受ける.このような過酷な動的環境下において組立 手法の有効性を検証する上では,(i)実際の実機を利用出来たとしても,巨大な構造物を組立 る実験は非常にコストが高く危険であり,小規模で限られたものになるため,実際の宇宙空間
14 第2章 大規模構造物組立とデッドロック問題
図2.7 対称移動デッドロック(非対称形)
図2.8 閉塞デッドロック
るかを可視化することは可能だが,組立手法がどのような条件下で有用であるかを示すこと は,パラメータを様々変化させ,経験的に説明するほかはない.しかし,それでも全てのパラ メータを網羅することは非常に困難であり,その結果がどのような法則で発生しているのかを 定式化して説明することは出来ない.したがって,問題を単純化し,法則性を見出す理論的な アプローチは非常に重要であり,手法の有効性や,適用範囲を明らかにする上では必須である.
■実機
実際の構造物を組立る場合,モデル化誤差や外乱の影響により,シミュレーションとは異な る挙動が発生し,シミュレーションで実現出来る環境下では発生しない問題が起きることがあ る.したがって,提案手法を実機に搭載した際にシミュレーションや理論通り動作することを 検証するのは非常に重要である.
以上から,本研究では提案手法の有効性をシミュレーション,理論,実機の3つの観点で 同時に検証する.具体的には,5章ではロボットに速度差や故障が発生する近実環境下におけ る有効性をシミュレーションによって検証し,6章では,理論的アプローチから構造物上のロ ボット割合が低くロボットが偏らない場合における有効性とその限界点を明らかにすると共 に,提案手法の有効範囲外となる構造物上のロボット割合が高くロボットの偏りが発生しやす い場合に適用可能な手法を提案し,理論と実機の2つの側面から検証する.
2.4 従来手法と本研究の位置付け
前節で分類したデッドロック問題は,前述の通り,大規模構造物組立において,ロボットが (i)パネルのフレーム上のみしか移動出来ない, (ii)荷物受け渡しは出来ない, (iii)局所通信の みを利用する, という三つの制限から発生している.このような問題に,これまでに提案され ている従来のロボットによるデッドロック回避手法を適用することは困難である.以下にそれ らの従来手法の詳細を述べる.
16 第2章 大規模構造物組立とデッドロック問題
2.4.1 ロボットにおけるデッドロック回避
大規模構造物組立においては,ロボットは(i)移動制限, (ii)機能制限, (iii)通信制限の3つ の制限があり,組立においてロボットを多数利用し,組立る地点の自然環境による影響を受け るため,個体差や故障が生じるという問題もある.従来のロボット間におけるデッドロック回 避手法については,様々なものが提案されているが,これら全てを考慮したものは現在の所例 を見ない.
具体的には,(i) の移動に制限がある環境でのデッドロック及び衝突回避については, [Duhant, 2007]の複数移動ロボットにおけるデッドロック回避手法や, [新井 ほか, 2001]の複 数自律ロボット協調などの先行研究があるが, これらはロボットが故障して停止しない環境を 前提としており,[Yuta, et al., 1991]ではロボット間で把持する物体のバケツリレーをする 手法を利用しているが,これは(ii)の制限に反する.また,[Gupta, et al., 1998]では予期し ない故障を含む不確定環境での衝突回避を扱っているが, これは移動に制限がなく, すれ違い が十分に出来る環境での検証であり,(i)を満たさない.また,予期しない故障を含む環境で
は, (iii)を満たし局所情報を利用するロボットは他のロボットの状況を知ることが出来ないた
め, 予め移動経路を決めておくことは出来ず, 広域な視点でデッドロックを回避することは出 来ない. この観点から, [Latombe, 1991] のような予め移動経路計画をする手法は利用できな い. また, 経路探索という観点からメタヒューリスティック手法の一つであるタブー探索法 [Glover, et al., 1997] の利用も考えられるが, 大規模構造物組立では, 組立や故障により常に ネットワークの形状は変化しているため,タブーとした道が次の瞬間には通れるようになる場 合もあり,適用は難しい. これら3つの制限を全て考慮した手法に我々が[Otani, et al., 2008]
において提案した二体一組のロボットの主従関係に基づく組立手法があるが,この手法はロ ボットの個体差や故障など動的環境下に対する解析が十分でない.
また,大規模構造物上で発生するデッドロックにおいては,ロボットが偏る場合に2.2.3.2 節で示した閉塞デッドロックが発生し,回避が非常に困難になる問題がある.我々の提案手法 もこの問題により組立出来なくなることが明らかとなっている.ロボットが偏る場合のデッド ロック回避手法としては,[星野 ほか,2011]で提案されている移動ロボットの適応的走行制 御が先行研究として挙げられる.この手法は移動経路の交差点にロボットが停滞するのを防ぐ 方法だが,故障などによるロボットの停止を考慮していないため,大規模構造物組立問題に適 用することは出来ない.
2.4.2 情報的なデッドロック回避
デッドロック回避においては,前項のように物理的なロボット以外にも,パケットルーティ ングのように情報的なデッドロックを扱う場合がある.
ケットとして送り出すため,送信元となるノードがパケットの送出を要求した際に経路を形成 する送信元始動型ルーティングプロトコルの一種でもある.
しかしながら,本研究で扱う大規模構造物組立問題は,通常のアドホックネットワーク問題 と異なり,送信するパケットが電子情報ではなく,物理的な筐体を持つロボットであることか ら,以下の相違点がある.まず,(i)ロボットはそれ自身がルータでありパケットとみなされ るため,一つのルータで複数のパケットを保持可能なDSRと違い,一つのルータにパケット は一つしか保持することが出来ず,(ii)ロボット自身がパケットであるため,パケットを分割 しての送出も出来ない.また,(ii)通常のネットワークではパケットが溢れた際に,パケット を破棄したのちタイムアウトを検知し,パケットを再送することが出来るが,ロボットを破棄 して再送することも出来ない.
上記の相違点により,パケットは一つしか保持出来ず,ロボット廃棄もできないため,すれ 違うためにはどちらかのノードを空ける必要があり,通常のルーティング問題では前提とされ ていないパケット(=ロボット) が移動できないデッドロック問題が発生し,本質的に大規模 構造物組立問題とネットワークルーティングは異なる問題であると言える.
2.4.3 本研究の位置付け
上記の通り,移動,機能,通信の3つの制限を全て考慮したデッドロック回避手法は,我々 が提案した二体一組の主従関係交換手法以外にはないが,この手法はロボットの個体差や故障 など動的環境下に対する解析が十分でなく,また,構造物上のロボットが偏る場合にデッド ロックが回避出来ない問題がある.更には,どの程度のロボット割合まで提案手法が有効であ るかという議論がなされていない.したがって,本研究では,[Otani, et al., 2008]で提案した 二体一組の主従関係交換手法の近実環境下への有効性を検証し,提案手法が有効となるロボッ ト割合を明らかにする.また,ロボットが偏る場合においても組立が可能な手法を提案し,検 証する.
第1章とこの章で紹介してきた従来手法を,ロボットの制限,実環境要素,及びロボットの 偏りという観点で分類したものを表 2.1に,その詳細についてまとめたものを表 2.2に示す.
表2.1のように,移動・機能・通信制限を満たし,かつ近実環境要素とロボットの偏りを両方
18 第2章 大規模構造物組立とデッドロック問題 検証した例はないため,本研究はこの部分に着目する.
表2.1 本研究の位置付け
理想環境 近実環境(個体差・故障)
移動・機能・通信制限無 ロボット偏り無し [Yamada, 2011]
[新井 ほか, 2001]
[山下 ほか,2002]
[Terada et al., 2008]
ロボット偏り有り [Duhant, 2007]
[Jian, et al, 2010]
[星野 ほか,2011]
[小泉 ほか,2010]
移動・機能・通信制限有 本研究
表2.2 従来手法と本研究の要素比較
手法 移動制限 機能制限 通信制限 故障・個体差 ロボット偏り考慮 [新井 ほか, 2001] X O X O X
[Yamada, 2011] X O O X X
[山下 ほか,2002] X X X O X
[Duhant, 2007] X O O X X
[Jian, et al, 2010] O O O O X
[小泉 ほか,2010] O O X O X
[星野 ほか,2011] O O O X O
本研究 O O O O O
2.4.4 本研究のアプローチ
本論文では,ロボットに移動・機能・通信制限がある環境下において,シミュレーション・
理論・実験という観点のもと,及び,理想環境と近実環境での比較という観点に着目し,表2.3 のように課題を分ける.具体的には,第5章では提案手法の大規模構造物組立における構造物 の形状や規模,個体差,故障といった,複雑化する現象を理論では取り扱うことが困難であり,
実際に実機のロボットを大量に用意し故障させることが不可能な問題に対して,シミュレー ションにより検証をする.そして,第6章前半では,提案手法の限界点や有効範囲を明らかに するため,理想的な環境下を前提として提案手法の理論化をする.最後に,第6章後半では,
最小限の実機のロボットを用いて,故障以外でロボット間に個体差があり,実際にロボット間
21
第 3 章
宇宙太陽発電衛星
この章では,本研究で取り扱う,宇宙太陽発電衛星の組み立てを説明する.この問題は,ロ ボットが(i)パネルのフレーム上のみしか移動出来ない, (ii)荷物受け渡しは出来ない, (iii)局 所通信のみを利用する, という大規模構造物組み立て問題における3つの制限を強いられる上 に,宇宙という過酷な環境下での組み立てであり,組み立てロボットには太陽の熱や宇宙線の 影響によって個体差の拡大や,故障が発生するなど,組み立てへの影響が懸念される.
本研究では,大規模構造物組み立てにおける最も困難な一例として宇宙太陽発電衛星を取り 扱い,その環境下で提案手法の有効性を示すことで,提案手法の大規模構造物組み立てへの適 用可能性を議論する.
3.1 宇宙太陽発電衛星
宇宙太陽発電衛星 (Space Solar Power Satellite: SSPS) は地球軌道上で太陽光発電し,
地上に送電するシステムである.CO2 を排出せず,近年問題化されている原子力等の取り 扱い上の危険性もないクリーンな発電手段として[Glaser, 1968]によって 1968 年に提唱さ れたシステムであり,その後1978年にthe National Aeronautics and Space Administra- tion(NASA)/Department of Energy’s Office of Nuclear Energy(DOE)によって概念設計が
[DOE/NASA, 1978]にまとめられている.この文献では,縦5km横20km の範囲に多数の
太陽電池パネルを敷き詰めて一つの巨大なパネルにしたものをからなる発電衛星を,高度約3 万6千km の静止衛星軌道上に打ち上げ,1基につき5〜10GW の電力を発電し,高周波マ イクロ波によって地上に送電するシステムとして設計されている.現在では,NASA をはじ めJAXA(the Japan Aerospace eXploration Agency),USEF(the Institute for Unmanned
Space Experiment Free Flyer)などの宇宙研究開発団体が実現性の高い構想を提案している.
これらのSSPSモデルはどれも巨大なものであり,構造物の集光部,発電部,送電部はどれを とってもロボットによる組み立てが必須となる.また,全て太陽光に晒されるために高温もし くは高低温の差により非常に過酷な環境であり,ロボットを用いた場合の故障が懸念される.
電した電力を,地球側にある直径100〜150mの送電部から前者同様,マイクロウェーブに変 換されて地上に送られる.NASA Reference Systemにおいては,太陽電池パネルの部分が,
Sun Towerでは送電部が複数パネルを組み合わせて一つの巨大なパネルとなっているため,ロ
ボットによる組み立てが必須だが,太陽側は常に高温に,反対側は低温に晒される過酷な環境 である.
図 3.1 NASA Reference System [DOE/NASA, 1978] (C) NASA
図 3.2 Sun Tower [Mankins, 2002]
(C) NASA
また,図3.3 もNASA が提案するモデルである.このモデルは,Integrated Symmetric
Concentrator(ISC)と呼ばれており,図の左右に表される2対の巨大な集光ミラーを用いて中
央の太陽電池パネル及び送電アンテナで構成される部分に太陽光を集め,発電する.このモデ ルでは集光パネルが非常に巨大なものとなり,ロボットで組み立てる必要があり,またこの部 分は高熱に晒される.
3.1.2 ISAS モデル
図3.4に宇宙科学研究所(The Institute of Space and Astronautical Science: ISAS)が提
案するSPS2000[小田, 2004]を示す.このモデルでは,三角形の2つの上辺が巨大な太陽電池
パネルとなっており,下辺の送電部から地上に送られる.下辺の送電部は常に地上を向く必要 があるため,発電部は太陽側と反対側を向くことになり,構造物を組み立てるロボットは激し
3.1 宇宙太陽発電衛星 23
図3.3 Integrated Symmetric Concentrator(ISC) [DOE/NASA, 1980] (C) NASA
図3.4 SPS2000 (C) ISAS
い温度差に晒される非常に過酷な環境である.
3.1.3 USEF モデル
図3.5に無人宇宙実験システム研究開発機構(Institute for Unmanned Space Experiment Free Flyer: USEF)が提案するモデル[小田, 2004]を示す.このモデルでは,発電と送電の両 機能が備わったパネルを組み合わせて一つの巨大なパネルとしている.このモデルも,ISAS モデルと同様に常には太陽方向を向かないため,組み立てロボットは温度差が激しい環境下で の組み立てを強いられる.
図3.5 USEFモデル(C) USEF
図3.6 JAXAモデル(C) JAXA
3.1.4 JAXA モデル
図3.6はJAXAが提案する,フォーメーションフライト技術によるモデルである.このモ デルは,NASAのISCモデルと似ており,集光部と発電及び送電をする部分に分けられてい るが,集光部と送電・発電部が物理的に独立しており,一定の軌道関係を保って飛行すること で,相対的な位置関係を維持している.このモデルも ISC同様に巨大で組み立てる必要があ る集光部は太陽側を常に向いている過酷な環境下である.

![図 3.3 Integrated Symmetric Concentrator(ISC) [DOE/NASA, 1980] (C) NASA](https://thumb-ap.123doks.com/thumbv2/123deta/7733832.1711708/39.892.254.716.104.365/図-integrated-symmetric-concentrator-isc-doe-nasa-nasa.webp)