佐藤和也
佐賀大学理工学部機械システム工学科
14:00~14:55, 18 Nov. 2005,
横浜市技能文化会館 2F多目的ホール
高精度位置決め制御系の構築
∼適応制御法によるアプローチ∼
日本鉄鋼協会
計測・制御・システム工学部会シンポジウム
『診断・制御技術の新潮流』
研究の背景
摩擦モデル
NN
による非線形関数の近似
従来研究とその問題点
提案手法と推定則の変更
実験結果
結論
講演の概要
Adaptive Control for Linear Slider with Friction Compensation
H
∞ground
stand
moving table
manipulator
positioning mechanism
1
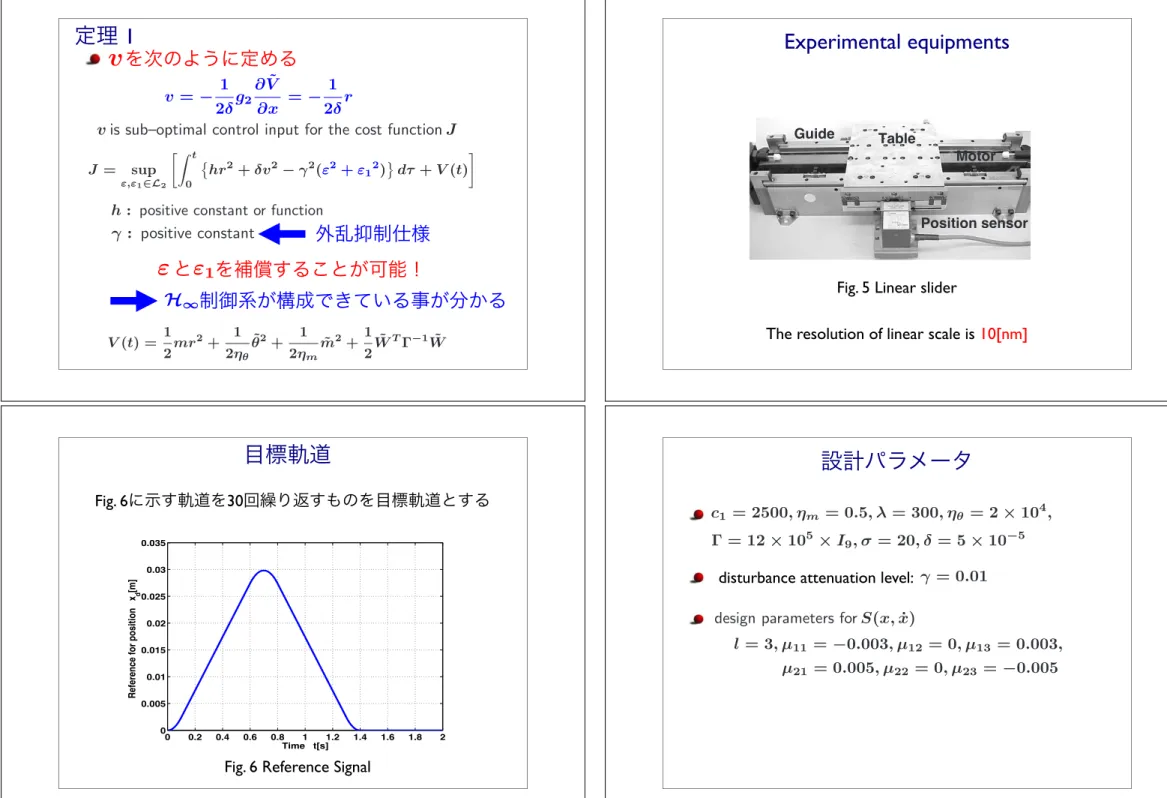
位置決め装置の概要
Fig. 1 Positoining Mechanism using Linear Slider
研究の背景
位置決め装置について
ナノ精度での位置決め性能が要求されている!
摩擦は無視できる!!
位置決めのみ
空気圧浮上
可動テーブルの加速度 10[G]
摩擦の存在!!
軌道追従性能が要求される
ボールベアリング
過渡状態における追従性能が要求される
Continuous Path Control
位置決め装置
Table
Motor
Guide
Position sensor
m
x
¨
+
F
= u
Fig 2. Linear Slider
m : mass of table, x: table position
u: control input, F : Friction force
実験結果∼摩擦を無視した適応制御∼
! !"# $ $"# % !& !% !$ ! $ % & '()$! !# *+,-)))./01 233430)))-/,1m¨
x = u,
u =
−c
1
r + ˆ
m¨
x
r
˙ˆ
m =
−η
m
x
¨
r
r, r
≡ ˙e + λe, ˙x
r
= ˙x
d
− λe
c
1
= 1250, η
m
= 0.5, λ = 330
Fig 3. Experimental result without friction comp.
従来までの研究
定常状態近傍でIゲインを調整する
PID
制御法による制御性能の限界
PID制御を用いる...
摩擦力の表現として不十分...
動的な摩擦力の記述が必要!
物理学の基礎では...
Previous Researches
Previous Researches
Previous Researches
レベルでの精密な制御性能の要求
1[µm]
F = µN
摩擦力:
µ
:摩擦係数
従来までの方法とその問題点
PID
制御による性能の限界
!
修正法やdead-zone法,射影則などが知られるが...
よい制御性能がえられた
動的摩擦モデルを考慮した適応制御の適用
推定則が積分型である...
有効ではあるらしいが...
繰り返し動作に適用すると,推定値の増加による不安定化...
LuGre
モデル
1
2
物体間の摩擦が剛毛の擦れ現象として表されている
Fig. 4 : Friction interface between two surfaces
LuGre
モデル
F
= σ
0
z
+ σ
1
z
˙
+ σ
2
x
˙
˙
z
= −α(x, ˙
x)| ˙
x|
z
+ ˙
x
α(x, ˙
x) =
σ
0
f
c
+ (
f
s
−
f
c
) exp{−( ˙
x/
x
˙
s
)
2
σ
0
: stiffness, σ
1
: damping coefficient, σ
2
: viscous friction
f
c
: Coulomb friction level
f
s
: the level of the stiction force
z : the average deflection of the bristles.
α
(x, ˙
x
) : unknown nonlinear function
測定不可能
LuGre
モデルは静摩擦力から動摩擦力への切り替わりが
連続的に表現されていると解釈できる!
F
= σ
0
z
+ σ
1
z
˙
+ σ
2
x
˙
˙
z
= −α(x, ˙
x)| ˙
x|
z
+ ˙
x
α(x, ˙
x) =
σ
0
f
c
+ (
f
s
−
f
c
) exp{−( ˙
x/
x
˙
s
)
2
LuGre
モデル
z
が初期値を有する
x
の初期値が0であっても摩擦力
F
には初期値がある
静摩擦力
誤差ダイナミクスの導出
x
d
誤差信号(目標値: , 1, 2階微分値は有界となる信号)
e = x − x
d
新たな信号:
˙x
r
= ˙x
d
−
λe
新たな信号:
r ≡
e
˙
+ λe
誤差ダイナミクス
m
˙r = u − F − m¨
x
r
誤差ダイナミクス
m
r
˙
= u − θ ˙x − F
z
(x, ˙
x,
z
) − m¨
x
r
LuGreモデルは次のように書き換えられる
誤差ダイナミクス
F
=
σ
1
+ σ
2
x
˙
+ σ
0
z
− σ
1
α(x, ˙
x)| ˙
x|
z
=
θ
x
˙
+ F
z
(x, ˙
x,
z
)
θ
= σ
1
+ σ
2
, F
z
= σ
0
z
− σ
1
α(x, ˙
x)| ˙
x|
z
θ ˙x : viscous friction force
F
z
(x, ˙
x,
z
) : dynamic friction force which depend on
z
LuGre
モデルにおける難しさ...
m
r
˙
= u − θ ˙x − F
z
(x, ˙
x,
z
) − m¨
x
r
NN
は非線形制御において様々に適用されている
Neural Network(: NN)
は任意の非線形関数を近似する
能力を有している
F
z
(x, ˙
x, z)
の近似にNNを用いる
精密な制御性能をえるには動的摩擦力
F
z
(x, ˙
x,
z
)
を補償する必要がある
動的摩擦力
F
z
(x, ˙
x,
z
)
が制御性能に及ぼす影響を
小さくする制御入力を構成する必要がある
は測定不能な剛毛のたわみの平均値を
F
z
(x, ˙
x,
z
)
含んだ関数となっている
NN
による関数の近似
NN
を用いた
F
z
(x, ˙
x, z)
W
∈
R
l
: optimal weight vector
ε(x, ˙
x) : NN approximation error
: known basis function vector
s
i
(x, ˙
x) = exp
!
−
(x − µ
1i
)
2
+ ( ˙
x − µ
2i
)
2
σ
2
"
i = 1, · · · , l
x,
˙x : input variables, σ
2
: variance, µ
1i
, µ
2i
: centres
の近似
F
(x, ˙
x)
=
Fnn(x, ˙
x) +
ε(x, ˙
x)
=
W
T
S(x, ˙
x) +
ε(x, ˙
x)
S
(x, ˙
x
) = [s
1
, s
2
, · · · , s
l
]
T
∈
R
l
Upper bound for dynamic friction force
F
z
(x, ˙
x, z)
|F
z
(x, ˙
x, z
)| ≤
σ
0
+ σ
1
α(x, ˙
x)
α
min
≡
F
zm
(x, ˙
x
)
NN approximation for
F
zm
(x, ˙
x)
W
∗
: unknown optimal weight vector
ε : NN approximation error
Neural network
による
F
z
(x, ˙
x, z
)
の近似
NN
近似における精度
適応的に推定する方法を提案
高精度な追従性能をえるために必要!
精度を求めるには...
F
zm
(x, ˙
x)
F
z
(x, ˙
x,
z
)
の上界
をNNにより近似する
W
∗
どのように
を決定するのか?
ε
NN
による近似誤差 の補償
F
zm
(x, ˙
x)
NN
により
を近似している
F
z
(x, ˙
x,
z
)
とのギャップを補償する必要有
NN
近似誤差である
ε
と
ε
1
を補償する必要がある!
ε
1
≡
F
z
(x, ˙
x, z) + F
zm
(x, ˙
x)
ε
1
をギャップと見なす
従来方法
Ge: '00, '01, Wang: '01
c
1
: positive constant
k : positive design constant which satisfy ε
d
< k
|ε| ≤ ε
d
誤差信号の符号が頻繁に切り替わるとチャタリ
ング現象を引き起こす恐れがある
問題点
sgn(r)
不連続関数
の存在
ε
を補償するため
k
設計パラメータ の決定法?
ε
1
は未知!!!
u
=
−c
1
r
+ ˆ
θ
x
˙
+ ˆ
m¨
x
r
− ˆ
W
T
S(x, ˙
x) sgn(r) − k sgn(r),
˙ˆ
θ
=
−η
θ
xr, η
˙
θ
>
0,
˙ˆ
m
=
−η
m
x
¨
r
r, η
m
>
0,
˙ˆ
W
=
ΓS(x, ˙
x)
|r|
,
Γ = Γ
T
>
0.
提案手法のコンセプト
推定則は変更なし
NN
近似誤差を不連続関数を用いることなく
補償する
NN
近似誤差とギャップをシステムに加わる外乱
と見なす
ˆ
W
は変更する
L
2
NN
近似とギャップからトラッキング誤差
r
までの ゲインを
γ
以下にする
つまり...
H
∞
適応型
制御系を逆最適の手法を用いて
設計する
提案する制御則
誤差ダイナミクス:
m
r
˙
= u − θ ˙x − F
z
(x, ˙
x, z
) − m¨
x
r
制御入力と推定則:
c
1
: positive constant, ˆ
θ : estimates of θ
ˆ
m
: estimates of m
ˆ
W : estimates of W
v
:新たな制御入力
次で与える
u
=
−c
1
r
+ ˆ
θ
x
˙
+ ˆ
m
x
¨
r
−
W
ˆ
T
S
(x, ˙
x
) + v
,
˙ˆ
θ
=
−η
θ
xr, η
˙
θ
>
0,
˙ˆ
m
=
−η
m
x
¨
r
r, η
m
>
0,
˙ˆ
W
=
ΓS(x, ˙
x)
r
,
Γ = Γ
T
>
0.
ˆ
W
T
S(x, ˙
x): NN approximation of F
zm
(x, ˙
x)
定理 1
v
is sub–optimal control input for the cost function J
J
=
sup
ε,ε
1∈L
2!"
t
0
#hr
2
+ δv
2
− γ
2
(
ε
2
+ ε
1
2
)$ dτ + V (t)
%
h : positive constant or function
γ : positive constant
V
(t) =
1
2
mr
2
+
1
2η
θ
˜
θ
2
+
1
2η
m
˜
m
2
+
1
2
W
˜
T
Γ
−1
W
˜
v = −
1
2δ
g
2
∂ ˜
V
∂x
= −
1
2δ
r
v
を次のように定める
外乱抑制仕様
ε
と
ε
1
を補償することが可能!
H
∞
制御系が構成できている事が分かる
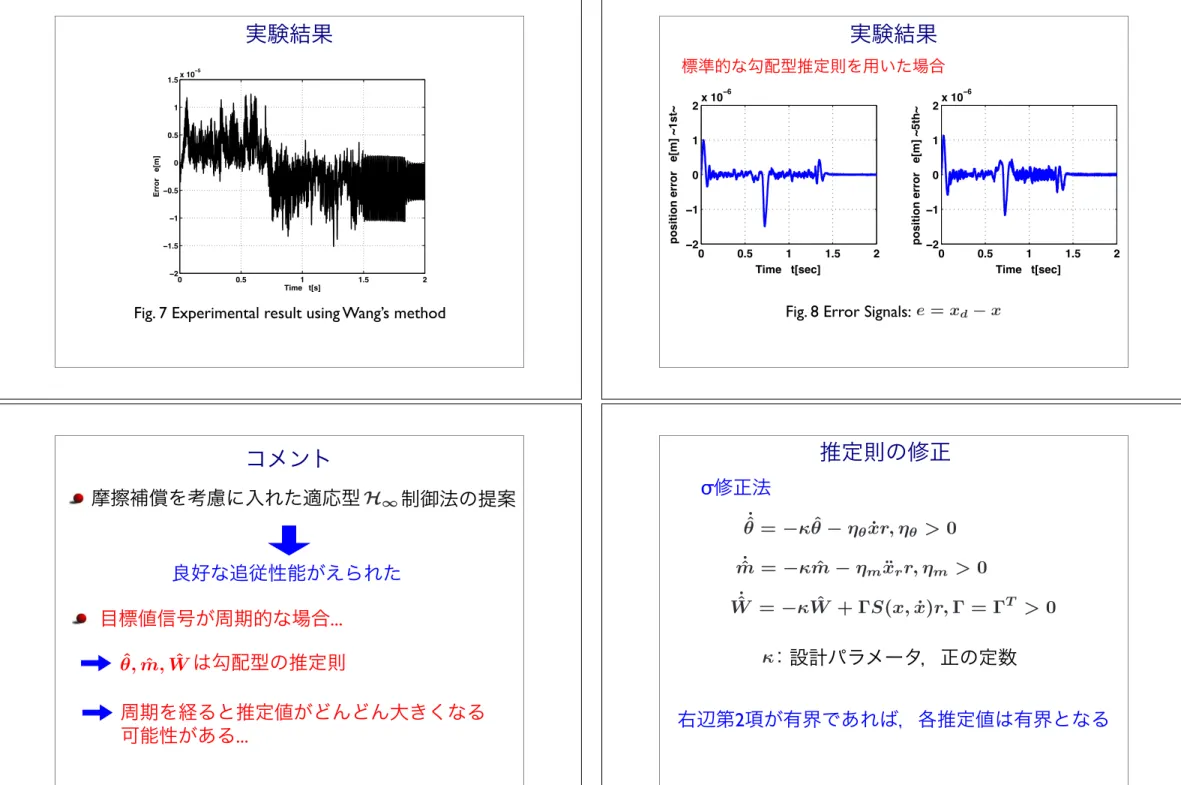
Experimental equipments
The resolution of linear scale is
10[nm]
Table
Motor
Guide
Position sensor
Fig. 5 Linear slider
目標軌道
Fig. 6
に示す軌道を30回繰り返すものを目標軌道とする
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 Time t[s]Reference for position x
d
[m]
1
Fig. 6 Reference Signal
設計パラメータ
c
1
= 2500
, η
m
= 0
.5, λ = 300, η
θ
= 2 × 10
4
,
Γ = 12 × 10
5
×
I
9
, σ = 20, δ = 5 × 10
−
5
disturbance attenuation level:
γ = 0.01
design parameters for S(x, ˙
x)
l = 3, µ
11
=
−
0
.003, µ
12
= 0
, µ
13
= 0
.003,
! !"# $ $"# % !% !$"# !$ !!"# ! !"# $ $"#&'$! !# ()*+''',-./ 01121'''+-*/
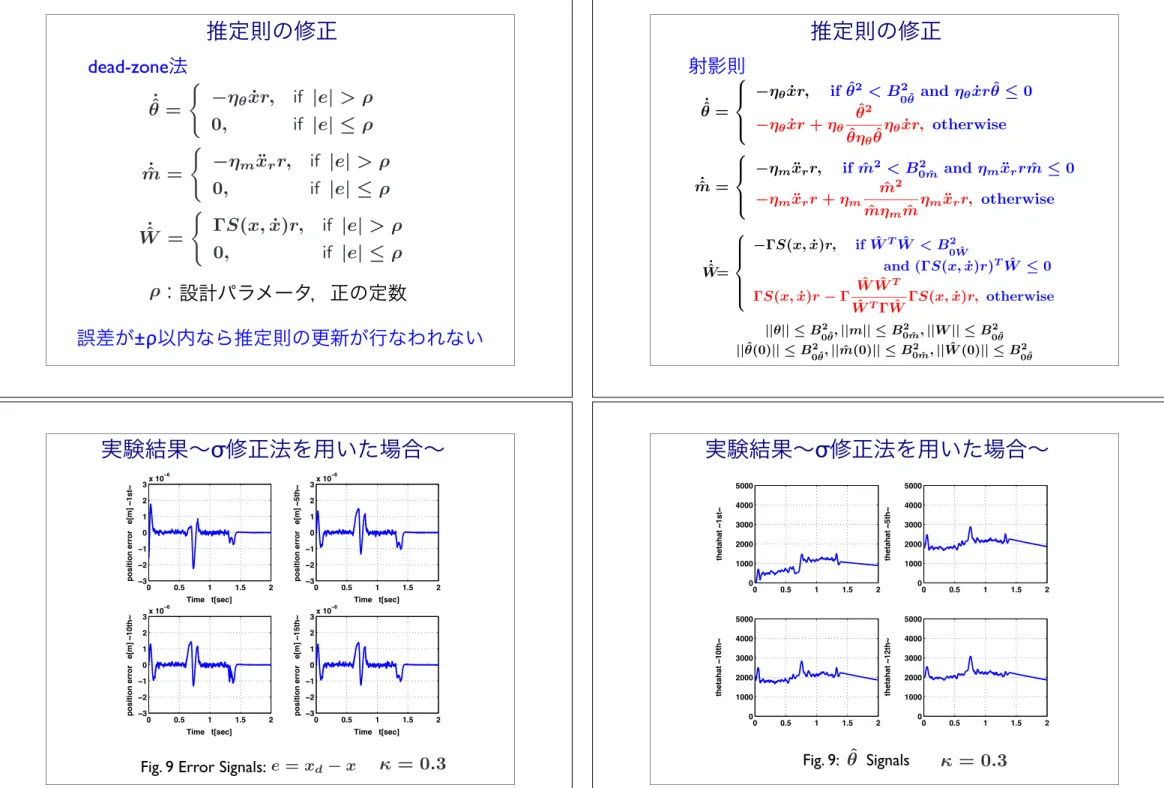
実験結果
Fig. 7 Experimental result using Wang’s method
実験結果
!
!"#
$
$"#
%
!%
!$
!
$
%
&'$!
!()*+,'''-./,01
23/*-*34',5535''',.+1'6$/-6
!
!"#
$
$"#
%
!%
!$
!
$
%
&'$!
!()*+,'''-./,01
23/*-*34',5535''',.+1'6#-76
標準的な勾配型推定則を用いた場合
Fig. 8 Error Signals:
e = x
d
−
x
コメント
良好な追従性能がえられた
目標値信号が周期的な場合...
周期を経ると推定値がどんどん大きくなる
可能性がある...
H
∞
摩擦補償を考慮に入れた適応型
制御法の提案
ˆ
θ, ˆ
m, ˆ
W
は勾配型の推定則
推定則の修正
!
修正法
˙
ˆ
θ = −κ
θ − η
ˆ
θ
xr, η
˙
θ
> 0
˙
ˆ
m = −κ ˆ
m − η
m
x
¨
r
r, η
m
> 0
˙ˆ
W
= −κ ˆ
W
+ ΓS(x, ˙
x)r, Γ = Γ
T
>
0
κ
:設計パラメータ,正の定数
右辺第2項が有界であれば,各推定値は有界となる
推定則の修正
dead-zone
法
:設計パラメータ,正の定数
誤差が±"以内なら推定則の更新が行なわれない
˙
ˆ
θ =
!
−η
θ
xr,
˙
if |e| > ρ
0
,
if |e| ≤ ρ
˙
ˆ
m =
!
−η
m
x
¨
r
r,
if |e| > ρ
0,
if |e| ≤ ρ
˙ˆ
W
=
!
ΓS(x, ˙
x)r,
if |e| > ρ
0,
if |e| ≤ ρ
ρ
||θ|| ≤ B
2
0 ˆ
θ
,
||m|| ≤ B
2
0 ˆ
m
,
||W || ≤ B
2
0 ˆ
θ
|| ˆ
θ(0)|| ≤ B
2
0 ˆ
θ
,
|| ˆ
m(0)|| ≤ B
2
0 ˆ
m
,
|| ˆ
W
(0)|| ≤ B
2
0 ˆ
θ
˙
ˆ
θ =
−η
θ
xr,
˙
if ˆ
θ
2
< B
2
0 ˆ
θ
and
η
θ
xr ˆ
˙
θ ≤ 0
−η
θ
xr + η
˙
θ
ˆ
θ
2
ˆ
θη
θ
θ
ˆ
η
θ
xr,
˙
otherwise
˙
ˆ
m =
−η
m
x
¨
r
r,
if ˆ
m
2
< B
2
0 ˆ
m
and η
m
x
¨
r
r ˆ
m ≤ 0
−η
m
x
¨
r
r + η
m
ˆ
m
2
ˆ
mη
m
m
ˆ
η
m
x
¨
r
r,
otherwise
˙ˆ
W=
−ΓS(x, ˙
x)r,
if ˆ
W
T
ˆ
W < B
2
0 ˆ
W
and (ΓS(x, ˙
x)r)
T
ˆ
W ≤
0
ΓS(x, ˙
x)r − Γ
W ˆ
ˆ
W
T
ˆ
W
T
Γ ˆ
W
ΓS(x, ˙
x)r,
otherwise
推定則の修正
射影則
実験結果∼!修正法を用いた場合∼
Fig. 9 Error Signals:
e = x
d
−
x
! !"# $ $"# % !& !% !$ ! $ % &'($! !) *+,-(((./0-12 340+.+45(-6646(((-/,2(7$0.7 ! !"# $ $"# % !& !% !$ ! $ % &'($! !) *+,-(((./0-12 340+.+45(-6646(((-/,2(7#.87 ! !"# $ $"# % !& !% !$ ! $ % &'($! !) *+,-(((./0-12 340+.+45(-6646(((-/,2(7$!.87 ! !"# $ $"# % !& !% !$ ! $ % &'($! !) *+,-(((./0-12 340+.+45(-6646(((-/,2(7$#.87
κ
= 0.3
実験結果∼!修正法を用いた場合∼
Fig. 9:
θ
ˆ
Signals
0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~1st~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~5th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 thetahat ~10th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 thetahat ~12th~κ
= 0.3
実験結果∼!修正法を用いた場合∼
Fig. 10:
Signals
0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~1st~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~5th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~10th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~12th~κ
= 0.3
ˆ
m
実験結果∼!修正法を用いた場合∼
Fig. 11:
Signals
κ
= 0.3
! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4$.,4 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4#,24 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4$!,24 ! !"# $ $"# % !%"# !% !$"# !$ !!"# ! !"&5+$! 6 '()*+++,-.*/0 123,+4$%,24ˆ
W
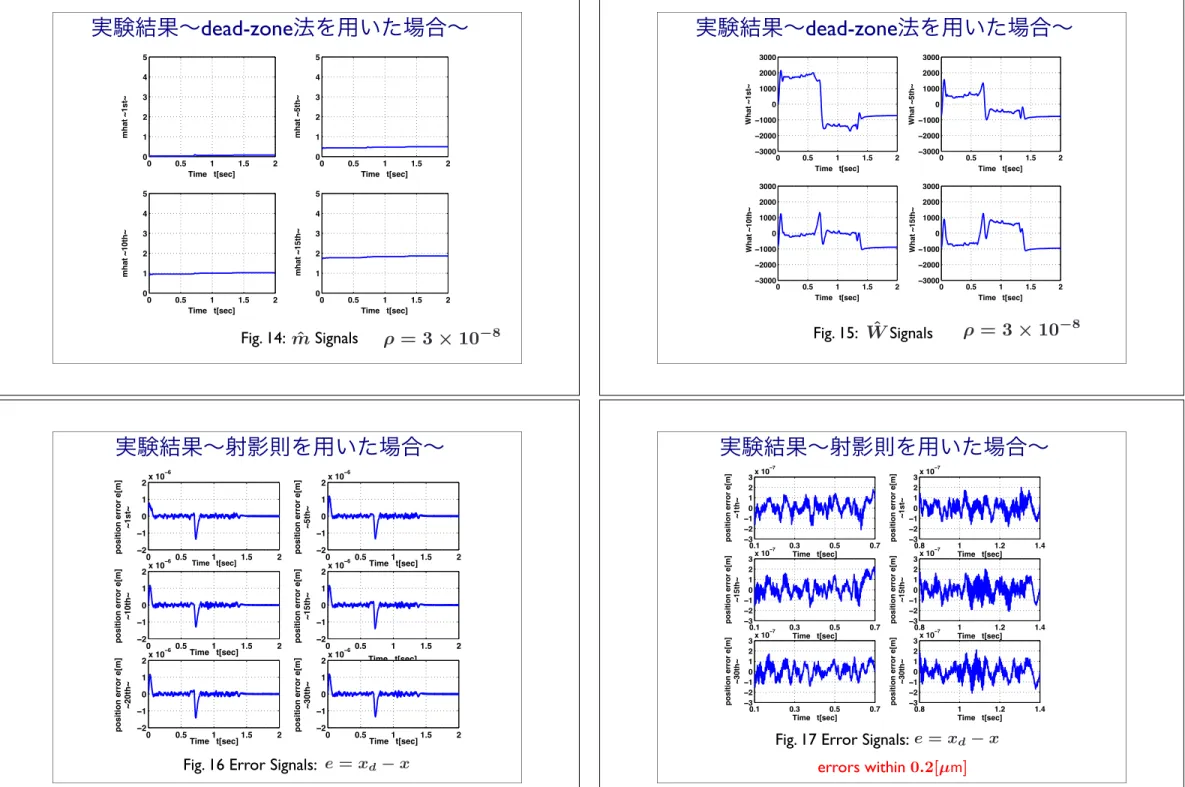
実験結果∼dead-zone法を用いた場合∼
Fig. 12 Error Signals:
e = x
d
−
x
! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535''',.+1'6$/-6 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535''',.+1'6#-76 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535''',.+1'6$!-76 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535''',.+1'6$#-76
ρ = 3 × 10
−
8
実験結果∼dead-zone法を用いた場合∼
Fig. 13:
θ
ˆ
Signals
0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~1st~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~5th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~10th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~15th~ρ = 3 × 10
−
8
実験結果∼dead-zone法を用いた場合∼
Fig. 14:
m
ˆ
Signals
0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~1st~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~5th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~10th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~15th~ρ = 3 × 10
−
8
実験結果∼dead-zone法を用いた場合∼
Fig. 15:
W
ˆ
Signals
! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4$.,4 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4#,24 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4$!,24 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4$#,24ρ = 3 × 10
−
8
! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535',.+1 6$#-76 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535',.+1 6$!-76 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535',.+1 6#-76 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535',.+1 6$/-6 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535',.+1 68!-76 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535',.+1 6%!-76Fig. 16 Error Signals:
e = x
d
−
x
実験結果∼射影則を用いた場合∼
!"# !"$ !"% !"& !$ !' !# ! # ' $()#! !& *+,-)))./0-12 340+.+45)-6646)-/,2 7#.87 !"9 # #"' #": !$ !' !# ! # ' $()#! !& *+,-)))./0-12 340+.+45)-6646)-/,2 7#0.7 !"# !"$ !"% !"& !$ !' !# ! # ' $()#! !& *+,-)))./0-12 340+.+45)-6646)-/,2 7#%.87 !"9 # #"' #": !$ !' !# ! # ' $()#! !& *+,-)))./0-12 340+.+45)-6646)-/,2 7#%.87 !"# !"$ !"% !"& !$ !' !# ! # ' $()#! !& *+,-)))./0-12 340+.+45)-6646)-/,2 7$!.87 !"9 # #"' #": !$ !' !# ! # ' $()#! !& *+,-)))./0-12 340+.+45)-6646)-/,2 7$!.87Fig. 17 Error Signals:
e = x
d
−
x
errors within
0.2[µm]
0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~30th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~20th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~15th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~10th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~5th~ 0 0.5 1 1.5 2 0 1000 2000 3000 4000 5000 Time t[sec] thetahat ~1st~
Fig. 18
θ
ˆ
Signal(
B
0 ˆ
θ
= 1000
)
実験結果∼射影則を用いた場合∼
0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~30th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~20th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~15th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~10th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~5th~ 0 0.5 1 1.5 2 0 1 2 3 4 5 Time t[sec] mhat ~1st~Fig. 19
m
ˆ
Signal(
B
0 ˆ
m
= 1
)
実験結果∼射影則を用いた場合∼
! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4&!,24 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4%!,24 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4$#,24 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4$!,24 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4#,24 ! !"# $ $"# % !&!!! !%!!! !$!!! ! $!!! %!!! &!!! '()*+++,-.*/0 123,+4$.,4Fig. 20
W
ˆ
Signal(
B
0 ˆ
W
= 1500
)
実験結果∼射影則を用いた場合∼
Fig. 21: Error signals
! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535 ,.+1'6$/-6 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535 ,.+1'6#/-6 ! !"# $ $"# % !% !$ ! $ %&'$! !( )*+,'''-./,01 23/*-*34',5535 ,.+1'6$!-76
(
σ-modification method
projection method
dead zone method
)
0 0.5 1 1.5 2 0 2000 4000 Time t[sec] thetahat ~1st~ 0 0.5 1 1.5 2 0 2000 4000 Time t[sec] thetahat ~5st~ 0 0.5 1 1.5 2 0 2000 4000 Time t[sec] thetahat ~10th~
Fig. 22: signals
θ
ˆ
実験結果
(
σ-modification method
dead zone method
projection method
)
0 0.5 1 1.5 2 0 0.5 1 1.5 2 Time t[sec] mhat ~1st~ 0 0.5 1 1.5 2 0 0.5 1 1.5 2 Time t[sec] mhat ~5st~ 0 0.5 1 1.5 2 0 0.5 1 1.5 2 Time t[sec] mhat ~10th~
Fig. 23: signals
m
ˆ
実験結果
(
σ-modification method
projection method
dead zone method
)
! !"# $ $"# % !&!!! !$#!! ! $#!! &!!! '()*+++,-.*/0 123,+4$.,4 ! !"# $ $"# % !&!!! !$#!! ! $#!! &!!! Time t[sec] 123,+4#.,4 ! !"# $ $"# % !&!!! !$#!! ! $#!! &!!! '()*+++,-.*/0 123,+4$!,24