1
平成30年度 修 士 論 文
高温環境での使用を目的とした
レアアースレス磁気浮上搬送装置
指導教員 栗田 伸幸 准教授 群馬大学大学院理工学府 理工学専攻 電子情報・数理教育プログラム 一場 雄太2
目次
1. 序論 2. 実験装置の構成 2.1 初期提案モデルの構成・・・・・・・・・・・・・・・・・・・・・・・・・・・05 2.2 初期提案モデルの動作原理・・・・・・・・・・・・・・・・・・・・・・・・ 08 2.2.1 浮上・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・08 2.2.2 推進・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・09 2.3 Model 2 の構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・12 2.4 Model 3 の構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・13 3. 磁場解析 3.1 Model 1 の磁場解析結果・・・・・・・・・・・・・・・・・・・・・・・・・・15 3.2 Model 2 の磁場解析結果・・・・・・・・・・・・・・・・・・・・・・・・・・17 3.3 Model 3 の磁場解析結果・・・・・・・・・・・・・・・・・・・・・・・・・・19 4. 試作機の検討 4.1 磁気飽和の検討・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・21 4.2 Model 3 の検討・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・23 4.2.1 Model 3 の構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・23 4.2.2 磁場解析・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・25 4.3 試作機モデルの検討・・・・・・・・・・・・・・・・・・・・・・・・・・・・27 4.3.1 試作機モデルの構成・・・・・・・・・・・・・・・・・・・・・・・・・・27 4.3.2 試作機モデルの磁場解析・・・・・・・・・・・・・・・・・・・・・・・・28 5. 実験装置の設計と製作 5.1 実験装置の設計・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・30 5.1.1 磁気浮上型搬送装置の設計・・・・・・・・・・・・・・・・・・・・・・・30 5.1.2 センサの設計・・・・・・・・・・・・・・・・・・・・・・・・・・・・・34 5.1.3 固定具の設計・・・・・・・・・・・・・・・・・・・・・・・・・・・・・35 5.1.4 固定具の構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・・37 5.2 実験装置の製作・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 5.2.1 磁気浮上型搬送装置の製作・・・・・・・・・・・・・・・・・・・・・・・39 5.2.2 コイルの製作・・・・・・・・・・・・・・・・・・・・・・・・・・・・・43 5.2.3 コイルの配線・・・・・・・・・・・・・・・・・・・・・・・・・・・・・443 5.3 センサアンプの製作・・・・・・・・・・・・・・・・・・・・・・・・・・・・45 5.4 制御系の製作・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・47 5.4.1 PID 制御・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・48 5.4.2 センサの構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・・49 5.4.3 センサマトリクスゲインの導出・・・・・・・・・・・・・・・・・・・・・50 5,4,4 磁気浮上型搬送装置の制御モデル・・・・・・・・・・・・・・・・・・・・53 6. 結論 6.1 まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・58 6.2 今後の展望・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・59 謝辞 参考文献 本研究に関する発表論文
4
1. 序論
現在,半導体製造プロセスにおいて,真空チャンバ内の試料台の操作はトラン スファーロッドや磁気結合型推進機構を用いて手動で行われている。そのため 磨耗・摩擦によって発生する塵埃が問題となる。そこで,非接触搬送技術の開発 が求められている。現在開発が進められている非接触型の搬送装置には,地面と 搬送物体との間に圧縮した空気を流体膜として形成し搬送するものや,超音波 によりスクイーズ膜を形成し搬送するもの,静電気を利用しクーロン力を用い ることで浮上搬送するものが存在する。しかし,圧縮空気を利用した浮上機構や 空気を振動させスクイーズ膜を利用した浮上機構は真空中で使用することがで きない。また,静電気を利用した浮上機構では,静電気力を得るために常に高い 電圧が必要となるため,高コストとなる。したがって本研究では磁気浮上型搬送 装置の開発を目的とする。他の磁気浮上型搬送装置は永久磁石と電磁石を組み 合わせたり,超電導効果を用いたりして物体を浮上搬送させている。しかし,本 研究では真空中での動作も考慮する。高真空を作るためには一度装置全体を熱 処理し周りの不純物を取り除く工程があり,永久磁石を用いると熱減磁により 磁力が失われる恐れがあるため永久磁石を用いない磁気浮上型搬送装置の開発 を目的とする。Fig. 1 Transport device using fluid film
5
2. 実験装置の構成
前述の通り,高真空を作るためには装置全体を高温にする作業が必要となる。 熱減磁による影響を考慮し永久磁石を用いない搬送装置を開発する。搬送装置 の推進には,リニアスイッチトリラクタンスモータの原理を用いる。真空チャン バ内で資料を操作することを考慮し,約500 g の試料を推進方向に 300 mm, 重力方向に± 2.5 mm 移動可能な性能を有することを設計目標とする。Fig. 2.1 に提案する磁気浮上型搬送装置の概略図を示す。また,各部の主な寸法をTable. 1 に示す。Table. 1 Dimensions of Stator and Floater Stator [mm]
Width Depth Height
Model 1 100 10 43
Model 2 100 10 50
Model 3 Upper stator 130 10 80.4
Model 3 Lower stator 40 10 45
Floater [mm]
Width Depth Height
Model 1 38 40 5 Model 2 38 40 8 Model 3 40 100 10
2.1. 初期提案モデルの構成
Fig. 2.1(c)に初期提案モデル(以後,Model 1)を示す。F 型が向かい合い下 の部分をつなげた形となっているステータコアには,F 型の上側の突出してい る部分(以後,上部突極)に浮上動作用コイル(以後,Upper coil)を 2 つと F 型の 下側の突出している部分(以後,下部突極)に浮上動作用コイル(以後,Lower coil) を2 つ施してある。また,左右の軸には推進動作用コイル(以後,推進コイル)を施してある。Upper coil は互いに同じ向き,Lower coil も互いに同じ向きに巻
いてあり,左右にあるUpper coil と Lower coil は逆向きに巻いてある。また,
左右の推進コイルは互いに逆に取り付けられている。つまり,ステータはステー
6
(a) Stator of Model 1
(b) Stator of Model 1 connected subordinately
7
SR 型フロータの構成を Fig.2.1(d)(e)に示す。SR 型フロータはスイッチトリ
ラクタンスモータの回転子を平面に伸ばした形を取っているためH 型になって
おり,フロータコア単体でSR 型フロータを成している。
(d) Top view of the floater
(e) Schematic diagram of the floater Fig.2.1 Model 1
8
2.2. 初期提案モデルの動作原理
2.2.1. 浮上
図 2.2 に浮上時の動作原理の図を示す。y 軸方向に浮上制御を行う場合,フロ
ータの変位に応じてUpper coil と Lower coil に制御電流を流し,黄色矢印で表
される制御磁束を発生させて浮上制御を行う。図 2.2(a)は y 軸の正の方向に浮 上動作させる場合の状態を示す。Upper coil に制御電流を流すと制御磁束が発 生し,コアの上部突極ではエアギャップに吸引力が発生するため,y 軸正方向の 浮上力が発生する。また,図 2.2(b)は y 軸の負の方向に浮上動作させる場合の 状態を示す。Lower coil に制御電流を流すと制御磁束が発生し,コアの下部突極 ではエアギャップに吸引力が発生するため,y 軸負方向の浮上力が発生する。
(a) Levitation motion
(b) Lowering motion
9
2.2.2 推進
Fig.2.3 に推進時の動作原理の図を示す。SR 型磁気浮上型搬送装置では PM 型磁気浮上型搬送装置と同様にステータには左右で逆巻きのコイルを配置し, ステータを 6 つ従属に配置することで正面から見た時片側 6 極,左右合わせる と計12 個のコイルを有し 3 極を再現している。Fig.2.3 Thrust control
コイルに流す電流ISRは以下のようになる。 𝐼𝑆R(𝑡) = 𝐼𝑠𝑖𝑛(𝜔𝑡 − 𝜃) + 𝐼𝐵 ・・・・・・・ (2.1) ここで, IB バイアス電流[A] フロータの推進制御にはステータに 3 相の制御電流を流す必要があり,それら 制御電流の式を以下に示す。 { 𝐼𝑆R𝑈(𝑡) = 𝐼𝑠𝑖𝑛(𝜔𝑡) + 𝐼𝐵 𝐼𝑆R𝑉(𝑡) = 𝐼𝑠𝑖𝑛 (𝜔𝑡 −2𝜋3) +𝐼𝐵 𝐼𝑆R𝑊(𝑡) = 𝐼𝑠𝑖𝑛 (𝜔𝑡 + 2𝜋 3) + 𝐼𝐵 ・・・・・・・ (2.2) ここで,SR1 と SR4 のコイルを U 相とし,流す制御電流を ISRUとする。同様 にSR3 と SR6 のコイルを V 相,SR2 と SR5 のコイルを W 相とし,流す制御
10 電流をISRV,ISRWとする。また,SL1~6 のコイルは SR1~6 のコイルと逆向きに 巻いてあるため,SL1 と SL4 のコイルを−U 相とし,流す制御電流を ISLUとす る。同様にSL3 と SL6 のコイルを−V 相,SL2 と SL5 のコイルを−W 相とし, 流す制御電流をISLV,ISLWとする。 𝜔𝑡 =7𝜋 6の時 { 𝐼𝑆R𝑈(𝑡) = 𝐼𝑠𝑖𝑛 ( 7𝜋 6) + 𝐼𝐵 = − 𝐼 2+ 𝐼𝐵 𝐼𝑆R𝑉(𝑡) = 𝐼𝑠𝑖𝑛 (𝜋2) + 𝐼𝐵 = 𝐼 + 𝐼𝐵 𝐼𝑆R𝑊(𝑡) = 𝐼𝑠𝑖𝑛 (11𝜋 6 ) + 𝐼𝐵 = − 𝐼 2+ 𝐼𝐵 ・・・・・・・ (2.3) 便宜的に電流によって発生する磁束密度の正の値をN 極,負の値を S 極とす ると式(2.3)より SR1~6,SL1~6 のコイルによって Fig.2.4 に示される磁極を実 現するように制御電流を流し,制御磁束を発生させる。それにより,ステータと フロータ前方の突極とのエアギャップに推進方向z 方向の吸引力が発生する。
Fig.2.4 Example of thrust control
𝜔𝑡 =11𝜋
11 { 𝐼𝑆R𝑈(𝑡) = 𝐼𝑠𝑖𝑛 ( 11𝜋 6 ) + 𝐼𝐵 = − 𝐼 2+ 𝐼𝐵 𝐼𝑆R𝑉(𝑡) = 𝐼𝑠𝑖𝑛 (7𝜋6) + 𝐼𝐵 = −𝐼 2+ 𝐼𝐵 𝐼𝑆R𝑊(𝑡) = 𝐼𝑠𝑖𝑛 ( 5𝜋 2) + 𝐼𝐵 = 𝐼 + 𝐼𝐵 ・・・・・・・ (2.4) 便宜的に電流によって発生する磁束密度の正の値をN 極,負の値を S 極とす ると式(2.4)より SR1~6,SL1~6 のコイルによって Fig.2.5 に示される磁極を実 現するように制御電流を流し,制御磁束を発生させる。それにより,ステータと フロータ後方の突極とのエアギャップに推進方向z 方向の吸引力が発生する。
Fig.2.5 Example of thrust control
12
2.3. Model 2 の構成
次に,Fig. 2.6 に Model 2 を示す。Model 2 は Model 1 の上部突極の形状を 鉤状に曲げたモデルである。上方向から吸引することでより安定した浮上力を
得ることを目的としている。フロータの形状もModel 1 とは異なり,鉤状の上
部ステータ突極に対抗するように,フロータ突極部も上方に鉤状に曲げている。
動作原理はModel 1 と同様である。
13
2.4. Model 3 の構成
最後にFig. 2.7 に Model 3 を示す。Model 3 は Model 2 に鉤状の上部突極の
みを取り出した上部ステータと,これとは独立な棒状の下部突極を有する下部 ステータから構成される。上部ステータと下部ステータの2 つを交互に配置し, 上部ステータ,下部ステータの突極でフロータを挟み込む。フロータ形状には Model 1 のような H 型ではなく,上下から挟み込むように配置したステータ突 極に対向するように,平板の上下に突極を配置した構造である。上部と下部のス テータを分割することでより強い推進力を得ることを目的としている。 Fig.2.7 Model 3
14
3. 磁場解析
提案した各モデルの浮上力と推進力を明らかにするため,3 次元 CAD システ
ム (Solid Works)および有限要素法電磁界解析ソフトウェア JMAG (JSOL, Japan)を用いて磁場解析を行った。以下に解析に用いた材料および条件を示す。 ・材料
ステータコア材料:Pure iron(SUY-1)
フロータコア材料1:Pure iron(SUY-1)
・コイル巻き数
Upper Coil:350 [Turn] Lower Coil:350 [Turn] Translation Coil:350 [Turn]
Model 1 のステータ・フロータ間のエアギャップは左右ともに片側 1 mm と
する。Model 2 は上部ステータとの上下方向のギャップを 1 mm,下部ステータ
との左右方向のギャップも片側1 mm ずつとする。一方,Model 3 のエアギャ
ップは2.7 mm とする。各モデルは Fig. 2.1(c)の様に奥側のステータ突極とフロ
15
3.1. Model 1 の磁場解析結果
フロータを推進方向Z 方向に 0~20 mm まで 1 mm ずつ変位させつつ,Model
1・Model 2 ではステータの,Model 3 では上部ステータの左側に配置した Upper Coil を奥から Clu 1,Clu 2…,右側に配置した Upper Coil を Cru 1,Cru 2…,
とした時のClu 3 と Cru 3 に制御電流を 0~3 A まで 1 A ずつ変化させながら流 した時フロータに働くY 方向の浮上力及び Z 方向の推進力を計算した。Fig. 3.1 にModel 1 の解析結果を示す。 Model1 はフロータの左右方向から吸引することで上下方向の浮上力を発生 させているため,最大5 N 程度の力しか得られず,搬送物をのせた状態で浮上 推進動作を行うことは困難であることが明らかとなった。
(a) Levitation force
0
10
20
0
2
4
6
Levi
ta
ti
o
n
f
o
rc
e [
N
]
Distance traveled by the floater [mm]
1 A
2 A
3 A
16 (b) Thrust force Fig. 3.1 Model 1
0
10
20
−1
0
1
Th
ru
st
f
o
rc
e [
N
]
Distance traveled by the floater [mm]
2 A
3 A
1 A
17
3.2. Model 2 の磁場解析結果
Fig. 3.2 に Model 2 の解析結果を示す。Model 2 は上部ステータを鉤状に曲げ ることで上向きの力を発生しやすい構造となっている。そのため,ステータ突極
とフロータ突極が完全に対向したとき最大 18 N の浮上力が得られていること
がわかる。しかし,浮上コイルと推進コイルを同一ステータ上に配置しているた め,Upper Coil に制御電流を流した場合でも推進方向に力が出ていることがわ かる。これにより,互いの動作を阻害してしまうことが懸念される。
(a) Levitation force
0
10
20
0
10
20
Levi
ta
ti
o
n
f
o
rc
e [
N
]
Distance traveled by the floater [mm]
1 A
2 A
3 A
18 (b) Thrust force Fig.3.2 Model 2
0
10
20
−2
0
2
Th
ru
st
f
o
rc
e [
N
]
Distance traveled by the floater [mm]
1 A
2 A
3 A
19
3.3. Model 3 の磁場解析結果
Fig. 3.3 に Model 3 の解析結果を示す。Model 3 はエアギャップ 2.7 mm の
初期位置において一つのステータで最大9 N と浮上力は十分な結果が得られて
いる。推進力はフロータの突極とステータの突極が重なり合う直前から強くな り,ステータ突極とフロータ突極が完全に対向する直前であるフロータの移動
距離18 mm の位置で最大 1.7 N が得られた。
(a) Levitation force
0
10
20
0
5
10
Levi
ta
ti
o
n
f
o
rc
e [
N
]
Distance traveled by the floater [mm]
1 A
2 A
3 A
20 (b) Thrust force Fig.3.3 Model 3 以上の結果より上部ステータを鉤状に曲げた Model 2 は Model 1 と比較し 3.6 倍の浮上力が得られることが明らかになった。しかし,浮上コイルと推進コ イルを同一ステータ上に配置しているため浮上コイルに制御電流を流した場合 でも推進力が発生してしまうことが分かった。Model 3 は Model 1 と比較し 1.7 倍の浮上力が得られ,比較的制御が容易であるためModel 3 を用いて試作機を 設計する。
0
10
20
0
1
Th
ru
st
f
o
rc
e [
N
]
Distance traveled by the floater [mm]
1 A
2 A
3 A
21
4. 試作機の検討
4.1. 磁気飽和の検討
まず,前章における磁場解析において,ステータコアの磁性体を直角に曲げて 構造を作った場合に,角部分の磁束密度が高くなり磁気飽和を起こしているこ とが明らかとなった。そこでModel 3 と Model 3 の磁性体が曲がる部分の角に 丸みを持たせたモデル(Model 3-0)を用意し磁束密度分布の比較を行った。その 磁束密度分布のコンター図および結果をFig.4.1,Fig.4.2 に示す。Fig.4.1 をみ ると角の部分で磁束密度のコンターの変化が緩やかになっていることが見て取れる。また,Fig.4.2 をみると Model 3 の浮上力は 8.8 N に対し Model 3 の角を
フィレットしたModel 3-0 の浮上力は 9.3 N となり Model 3-0 のほうが 0.5 N
ほど大きくなった結果が得られた。このことより角にフィレットをかけること により角部分での磁気飽和が解消されていることが明らかになった。
(a) Without fillet (b) With fillet
22
Fig.4.2 Difference in levitation force by fillet
0
1
2
3
0
5
10
Control current [A]
Levi
ta
ti
o
n
f
o
rc
e [
N
]
with fillet
without fillet
23
4.2. Model 3 の検討
4.2.1. Model 3 の構成
Fig. 4.3 (a)~(d)に検討する試作機の概略図を示す。モデル 3 において大きな 電流を流した際にステータの鉤状の部分の磁束密度が飽和するという問題があ った。そこで,ステータ突極とフロータ突極の対向する面積を 2 倍に増やした 形状をModel 3-1 とする。次に,Model 3-2 は全体の形状をコンパクトにするた めModel 3-1 において上部ステータの巻線を巻いている部分の長さを 30 mm か ら10 mm に変更した。また,上部ステータのコイルの配置を側面の支柱側に変 更した。最後に,Model 3-3 は Model 3-2 のステータ形状のままコイルの配置を 変更した。 (a) Model 3-0 (b) Model 3-124
(c) Model 3-2
(d) Model 3-3
25
4.2.2. 磁場解析
各モデルの浮上力を明らかにするため,3 次元 CAD システム (Solid Works)
および有限要素法電磁界解析ソフトウェアJMAG (JSOL,Japan)を用いて磁場 解析を行った。以下に解析に用いた材料および条件を示す。 ・材料 ステータコア材料:Pure iron(SUY-1) フロータコア材料1:Pure iron(SUY-1) ・コイル巻き数
Upper Coil:350 [Turn] Lower Coil:350 [Turn] Translation Coil:350 [Turn] エアギャップ:2.7 [mm]
次に,各モデルにおいてフロータの突極間の中心にステータの突極が配置して ある場合と,フロータの突極とステータの突極が向かい合って配置してある場 合について,Prototype model の上部ステータの左側に配置した Upper Coil を
奥からClu 1,Clu 2…,右側に配置した Upper Coil を Cru 1,Cru 2…,とし
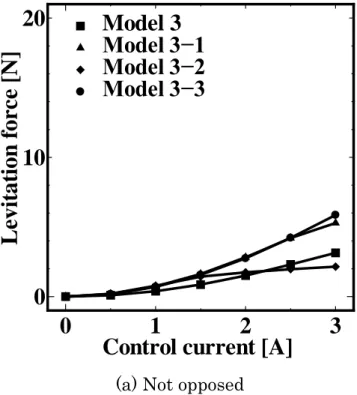
た時のClu 3 と Cru 3 に制御電流を 0~3 A まで 1 A ずつ変化させながら流した 時,フロータに働く重力と逆の方向の浮上力を計算した。Fig. 4.4 (a)(b)に解析 結果を示す。 モデル 3-1 の浮上力は,モデル 3 に対しステータとフロータの対向面積を増 やしたため浮上力が 5N ほど大きくなっていることがわかる。Model 3-2 と Model 3-3 は Model 3 と比べ X 方向のサイズを 130 mm から 90 mm にし, Model 3-2 ではステータ支柱部に配置したコイルを Model 3-3 はエアギャップ に近くなるよう天軸部に配置してある。Model 3-2 と Model 3-3 を比較すると エアギャップ近くにコイルを配置した Model 3-3 の方が吸引力が大きくなると いう結果が得られた。 以上の結果から,コイルをエアギャップ近くに配置することで全体のサイズ を小さくしても目標とする浮上力が得られることが明らかになった。以上の解 析結果を踏まえ,製作性を考慮しつつ実験装置の詳細な設計を行った。
26
(a) Not opposed
(b) Opposed
Fig. 4.4 The levitation force when the stator salient pole and the floater salient pole face each other or when they do not face each other
0
1
2
3
0
10
20
Levi
ta
ti
o
n
f
o
rc
e [
N
]
Control current [A]
Model 3
Model 3−1
Model 3−2
Model 3−3
0
1
2
3
0
10
20
Levi
ta
ti
o
n
f
o
rc
e [
N
]
Control current [A]
Model 3
Model 3−1
Model 3−2
Model 3−3
27
4.3. 試作機モデルの検討
4.3.1. 試作機モデルの構成
Fig.4.5 に実験装置全体の概略図を示す。また,ステータをベースに固定する ためのねじ穴や,ステータを分割して製作することで生じる磁性体のわずかな ギャップ,変位センサなど,すべての要素をできる限り実際の実験装置に近い状 況を再現したモデルを作成した。(a) Overall view
(b) Front view
28
4.3.2. 試作機モデルの磁場解析
フロータを推進方向Z 方向に 0~20 mm まで 1 mm ずつ変位させつつ,上部
ステータの左側に配置したUpper Coil を奥から Clu 1,Clu 2…,右側に配置し
たUpper Coil を Cru 1,Cru 2…,とした時の Clu 3 と Cru 3 に制御電流を 0
~3 A まで 1 A ずつ変化させながら流した時フロータに働く Y 方向の浮上力及 びZ 方向の推進力を計算した。浮上力と推進力の結果をそれぞれ Fig. 4.6,Fig. 4.7 に示す。浮上力の解析結果より,フロータの移動距離が 20 mm の時,制御 電流が3 A 時には最大 19 N,ステータ突極とフロータ突極が対向していない 0 ~10 mm の時でも 8 N 程度出ていることがわかる。実際の浮上制御はフロータ に対して少なくとも 2 つの上部ステータで行う。複数のステータで浮上させた 場合の目標値が5 N だったため,本装置では十分な浮上力が得られることが明 らかとなった。また,推進力の解析結果より,移動距離が0~5 mm までの範囲 では吸引すべきフロータ突極でない突極が上部ステータClu 3,Cru 3 の近くに あるため負の力が表れている。しかし,スイッチトリラクタンスモータのように フロータの位置によって制御電流を変更することで推進動作が実現できる。
Fig.4.6 Levitation force of prototype model
0
5
10
15
20
25
0
5
10
15
20
L
ev
it
at
io
n
forc
e
[N
]
Dispracement [mm]
1A
2A
3A
29
Fig.4.7 Thrust force of prototype model
-3
-2
-1
0
1
2
3
4
5
6
0
5
10
15
20
T
h
ru
st
fo
rce
[N
]
Dispracement [mm]
1A
2A
3A
30
5. 実験装置の設計と製作
5.1.
実験装置の設計
5.1.1. 磁気浮上型搬送装置の設計
フロータ,上部ステータ,下部ステータの寸法を磁場解析の結果に基づいて決 定し,設計した。設計には3D CAD ソフト SolidWorks を用いた。以下に,設 計した部品を示す。31
(b) Mid of Upper stator
(c) Base of Upper stator Fig.5.1 Upper stator
32
(a) Mid of Lower stator
(b) Base of Lower stator Fig.5.2 Lower stator
33
(a) Floater
(b) Copper plate of floater Fig.5.3 Floater
34
5.1.2. センサの設計
センサの寸法を磁場解析の結果に基づいて決定し,設計した。設計には 3D
CAD ソフト SolidWorks を用いた。以下に,設計した部品を示す。
35
5.1.3. 固定具の設計
5.1.1.および 5.1.2.で設計した実験装置の固定を行う部品の寸法を決定し,設計
した。設計には3D CAD ソフト SolidWorks を用いた。以下に,設計した部品
を示す。
36
(a) Base of sensor holder
(b) Cover of sensor holder Fig.5.6 Sensor holder
37
5.1.4. 固定具の構成
提案する磁気浮上搬送装置のステータ,フロータ,センサを固定する装置の構 成を説明する。Fig.5.7 に Upper stator と Lower stator および Fixed base を 組み合わせた図を示す。Base of Upper stator と Base of Lower stator は Fixed base に刻まれた溝にはめ込むことにより x 軸・z 軸方向の動きを制限すること ができる。また,Mid of Upper stator および Mid of Lower stator に開けられ
たネジ穴にUpper stator は上下から,Lower stator は下部からボルトで固定す
ることにより y 方向の動きを制限する。Y 軸方向の回転はそれぞれステータに
刻まれた溝により制限することができる。
Fig.5.8 に Sensor holder の概略図を示す。Base of sensor holder の上部に配
置された10 個の穴は Base of sensor holder と Fixed Base を固定するためにス
ペーサを取り付けるための部分である。また,9 つの半円状に削られている溝は
センサを固定するためのものであり,貫通しないことにより y 軸方向の動きを
制限し,半径よりも短くカットすることによりFig. で示したセンサのコードを
外部へ通すとともにCover of sensor holder と組み合わせることにより x 軸 z 軸
方向の動きを制限するように設計した。
38
39
5.2. 実験装置の製作
5.2.1. 磁気浮上型搬送装置の製作
設計を行ったのち,実験装置の製作を行った。以下は,製作した部品である。
Fig.5.9 Upper stator (SUY-1)
40
Fig.5.11 Floater (SUY-1)
41
Fig.5.13 Sensor
42
Fig.5.15 Cover of sensor holder
Fig.5.9 の Upper stator と Fig.5.10 の Lower stator,Fig.5.11 の Floater は SUY-1 で製作し,Fig.5.12 の Fixed base は SUS304 で製作した。また,Fig.5.14
のBase of sensor holder と Fig.5.15 の Cover of sensor holder はアクリルで
43
5.2.2. コイルの製作
Fig.5.16 と Fig.5.17 に示すように 12 個の Top of Upper stator と 12 個の Mid of Upper stator,12 個の Mid of Lower stator に∅0.4 mm のエナメル線
で巻き線を施した。Top of Upper stator coil の巻き数は 50 turn,Mid of Upper
stator coil の巻き数は 350 turn,Mid of Lower stator coil の巻き数は 350 turn とした。
Fig.5.16 Upper stator coil
44
5.2.3. コイルの配線
Fig.5.18 に示すように Upper coil と Lower coil の配線作業を行った。配線の 柔軟性や現在用いることのできるアンプの口数を考え,直接センサアンプのコ
ネクタに繋ぐのではなく配線の先にY 端子を取り付け配線作業を行った。
45
5.3. センサアンプボックスの製作
センサアンプボックスの製作のため,Fig.5.19 (a)~(d)に示すようにアルミボ ックスの正面,背面,底面に加工を施し電源基盤,センサ変換機,コネクタ,フ ァンの配線を行った。
46
(b) Back of Amplifier box
(c) Bottom of Amplifier box Fig.5.19 Amplifier box
47
5.4. 制御系の製作
本磁気浮上型搬送装置の構成を Fig.5.20 に示す。本装置はフロータ下部スペ
ースにある 3 つの渦電流式変位センサを用いてフロータの y 軸方向の並進と傾
き𝜃𝑥,𝜃𝑧の3 軸を検出する。これらの渦電流式変位センサにより検出された変位
信 号 は A/D コ ン バ ー タ を 通 り 高 速 演 算 器 (Digital Signal Processor :
DSP)(dSPACE 製 DS1103) に 入 力 さ れ る 。 そ し て DSP 内 の MATLAB/Simulink を用いて作成された制御モデルによって各コイルに対応
する制御電流の指令信号が計算される。指令信号がD/A コンバータを通り電流
アンプ(リニアアンプ)に入力される。電流アンプは入力された指令信号に対応し
た制御電流を出力する。出力された電流がUpper coil または Lower coil に流れ
ることによりフロータに支持力が発生する。基本的にフロータの位置,傾きを定 常位置に安定させるように位置制御を行う。
48
5.4.1. PID 制御
本磁気浮上型搬送装置の並進制御,傾き制御に使用する PID 制御について述 べる。 PID 制御とはフィードバック制御の一種である。現在地と目標値(Ref) の偏 差を比例(Proportional),微分(Derivative),積分(Integral) の 3 つの要素を用い て演算し,各要素で産出された値の合計を出力する。Fig.5.21 に PID コントローラの概略図を示す。また,Fig.5.22 に PID コン トローラを含む制御モデルの概略図を示す。実際の制御の手順は以下の通りで ある。まず,変位センサ(Sensor) によって測定されたフロータの並進変位,傾 き変位と目標値の差がPID コントローラに入力される。入力された値が PID コ ントローラ内で比例,微分,積分される。そして,それぞれの値の合計が指令信 号として出力される。指令信号は Fig.5.22 に示すように最終的には制御電流と なり装置(Object),つまりはフロータの運動に作用する。この時,各ステータは フロータ位置を目標値に近づける制御磁束を発生させる。そしてフロータの変 位を再び変位センサが測定する。この一連の動作を常に行うことでフロータは 目 標 値 に 追 従 し 続 け る 。PID 制 御 は PID コ ン ト ロー ラ 内の 比 例 ゲ イ ン
𝐾𝑝[A/mm],微分ゲイン𝐾𝑑[A・sec/mm],積分ゲイン𝐾𝑖[A/(sec・mm)]の値によっ
て制御性能が変化する。
Fig.5.21 PID controller
Fig.5.22 Control model Kp
Kd
Ki
PID ctrl
Input
Output
Ref
PID ctrl
D/A
Object
Sensor
49
5.4.2. センサの構成
磁気浮上型搬送装置の位置情報取得に用いる変位センサの構成について説明 する。変位センサは株式会社電子応用製の渦電流変位センサであり,センサヘッ ド:PU-14,センサアンプ:AEC-7614 を使用する。 Fig.5.23 にセンサアンプを示す。変位センサは 5.2.1.で示したものを使用す る。センサヘッドの大きさは高さ 15.0 mm,直径∅14.0 mm である。センサの 配置の関係上本来センサにある金属部を無くしセンサヘッド下部から直接セン サケーブルが伸びるようなタイプのものを使用している。センサ検出面は Fig. 5.13 において,円柱の上側平面である。 センサの仕様は,測定範囲:0~6.0 mm,非直線領域α0:0.6 mm,出力は± 5.0 V である。磁気浮上型搬送装置のフロータの上下移動範囲は 5.0 mm として いるため,可動範囲全域において測定が可能となっている。 Fig.5.23 は使用している変位センサアンプである。1 つの変位センサに 1 つ のセンサアンプが必要となるため今現在の実験において最大 6 つのセンサアン プを用意する必要がある。50
5.4.3. センサマトリクスゲインの導出
浮上制御において 3 つの渦電流式変位センサを用いて,フロータの y 軸方向
の並進と傾き𝜃𝑥,𝜃𝑧の3 軸の変位を算出する方法について述べる。
Fig.5.24 は Upper stator および Lower stator の突極面と変位センサ S1, S2,S3 のみを示した概略図である。3 つのセンサは z 軸方向に 25 mm,S1 お よびS3 と S2 は x 軸方向に 20 mm の間隔で配置されている。また,センサの 重心とフロータの重心がずれているためそれを補正する必要がある。センサS1 の 出力を𝑆1,S2 の出力を𝑆2,S3 の出力を𝑆3,フロータの重心位置𝑆𝑔 を求める式は次式とな る。 𝑆𝑔= 0.1𝑆1+ 0.5𝑆2+ 0.4𝑆3 ・・・・・・ (5.1)
センサS1,S2,S3 を用いて Upper stator US1,US2,US3,US4 と Lower
stator LS1,LS2,LS3,LS4 および傾きを求めるため FS1,FS2,FS3,FS4 に仮想的なセンサを表現すると次式で表せる。 𝑆𝑈𝑆1= −0.07222 𝑆1+ 2.44444 𝑆2− 1.37222 𝑆3 ・・・・・・ (5.2) 𝑆𝑈𝑆2= 1.87222 𝑆1+ 2.44444 𝑆2+ 0.57222 𝑆3 ・・・・・・ (5.3) 𝑆𝑈𝑆3= 0.27222 𝑆1− 1.44444 𝑆2+ 2.17222 𝑆3 ・・・・・・ (5.4) 𝑆𝑈𝑆4= −1.67222 𝑆1+ 2.44444 𝑆2+ 0.22778 𝑆3 ・・・・・・ (5.5) 𝑆𝐿𝑆1= −0.47222 𝑆1+ 2.44444 𝑆2− 0.97222 𝑆3 ・・・・・・ (5.6) 𝑆𝐿𝑆2= 1.47222 𝑆1+ 2.44444 𝑆2− 0.97222 𝑆3 ・・・・・・ (5.7) 𝑆𝐿𝑆3= 0.67222 𝑆1− 1.44444 𝑆2+ 1.77222 𝑆3 ・・・・・・ (5.8) 𝑆𝐿𝑆4= −1.27222 𝑆1+ 2.44444 𝑆2− 0.17222 𝑆3 ・・・・・・ (5.9) 𝑆𝐹𝑆1= 0.9 𝑆1+ 0.5 𝑆2− 0.4 𝑆3 ・・・・・・ (5.10) 𝑆𝐹𝑆2= −0.7 𝑆1+ 0.5 𝑆2+ 1.2 𝑆3 ・・・・・・ (5.11) 𝑆𝐹𝑆3= 1.07222 𝑆1− 1.44444 𝑆2+ 1.37222 𝑆3 ・・・・・・ (5.12) 𝑆𝐹𝑆4= −0.87222 𝑆1+ 2.44444 𝑆2− 0.57222 𝑆3 ・・・・・・ (5.13) これらの計算結果より,3 つの変位センサ出力から各ステータとフロータのギ ャップに変換するセンサマトリクスゲイン𝐾𝐴 は次式のようになる。
51 𝐾𝐴= [ −0.07222 1.87222 0.27222 −1.67222 −0.47222 1.47222 0.67222 −1.27222 0.9 −0.7 1.07222 −0.87222 2.44444 2.44444 −1.44444 2.44444 2.44444 2.44444 −1.44444 2.44444 0.5 0.5 −1.44444 2.44444 −1.37222 0.57222 2.17222 0.22778 −0.97222 −0.97222 1.77222 −0.17222 −0.4 1.2 1.37222 −0.57222] ・・・・・・ (5.14) 従って仮想センサSUS1~SFS4 の出力は次式で表される。 [ 𝑆𝑈𝑆1 𝑆𝑈𝑆2 𝑆𝑈𝑆3 𝑆𝑈𝑆4 𝑆𝐿𝑆1 𝑆𝐿𝑆2 𝑆𝐿𝑆3 𝑆𝐿𝑆4 𝑆𝐹𝑆1 𝑆𝐹𝑆2 𝑆𝐹𝑆3 𝑆𝐹𝑆4] = 𝐾𝐴[ 𝑆1 𝑆2 𝑆3 ] ・・・・・・ (5.15) そして仮想センサSUS1~SLS4 の出力を用いてロータの y 軸方向の並進の変位 に変換する式は次のように決まる。 y = 𝑆𝑈𝑆1+ 𝑆𝑈𝑆2+ 𝑆𝑈𝑆3+ 𝑆𝑈𝑆4+ 𝑆𝐿𝑆1+ 𝑆𝐿𝑆2+ 𝑆𝐿𝑆3+ 𝑆𝐿𝑆4 8 [mm] ・・・・・・ (5.16) またフロータの傾き𝜃𝑥,𝜃𝑧を求める式は次のようになる。 𝜃𝑥= tan−1 1.6𝑆1− 1.6𝑆3 80 [deg] ・・・・・・ (5.17) 𝜃𝑧= tan−1 1.94444𝑆1− 3.88889𝑆2− 1.94444𝑆3 70 [deg] ・・・・・・ (5.18)
52
53
5.4.4. 磁気浮上型搬送装置の制御モデル
DSP 内で実現される MATLAB/Simulink の磁気浮上型搬送装置の制御モデ ルについて説明する。Fig.5.25 に磁気浮上型搬送装置の制御モデルを示す。 5.4.2.で述べたように,3 つの変位センサの出力をフロータの各ステータのギ ャプに変換する。制御モデルではその各ステータのギャップをそれぞれ 目標値と比較して,PID コントローラの入力とし,最終的に 8 個の指令信号を 作成する。そのため,Fig5.26 に示すように PID controller ブロック内部には合計8 個の PID コントローラが存在する。
54
55
Fig.5.27 に PID コントローラの内部を示す。比例ゲイン𝐾𝑝[A/mm],微分ゲ
イン𝐾𝑑[A・sec/mm],積分ゲイン𝐾𝑖[A/(sec・mm)]の値は制御ソフトウェア Control desk(dSPACE 製)を用いることで制御中に変更することが可能である。 積分要素は時間に依存しているため,積分要素を有効にする瞬間が0 sec でなけ ればならない。そのため,積分要素にのみスイッチを導入し,最初はPD 制御で フロータを浮上させておき,任意のタイミングで積分要素を入れることで PID 制御に切り替える。
Fig.5.28 に Main switch ブロックの内部を示す。ブロック内部の Main switch ブロックの数値が 0 であるとき,Product ブロック(乗算器)以降の出 力は0 になり制御は行われない。ブロック内部の Main switch ブロックの数値 を 1 に変更することで,PID コントローラの出力が通過し,制御が開始する。 Saturation ブロックは上限下限を設定し,その範囲を過ぎる値は上限もしくは 下限の値にして出力するものである。Saturation ブロックは電流アンプの許容 電流以上を要求する指令信号を電流アンプに入力することを防ぐ役割がある。 AMP Gain ブロックは使用する電流アンプ自体の増幅率を相殺するために必要 である。
Fig.5.27 PID controller model
56
Fig.5.29 に DAC&ADC ブロックの内部を示す。DSP から指令信号を出力す
る D/A コンバータ(DAC) と外部からの信号を DSP に入力する A/D コンバー
タ(ADC) から構成される。8 個の PID コントローラの出力信号を DSP から電 流アンプに出力するため,DAC も 8 個存在する。ADC は 3 つの変位センサの 出力をマトリクスとして制御モデルに入力する。また,DSP は入力電圧を 0.1 倍にしてPC 内部に取り込むため,PC 側で 10 倍することで元の信号に戻す必 要がある。そのため,ADC ブロックの出力を 10 倍するゲインブロックを配置 している。出力するときは10 倍された信号を 0.1 倍する必要があるため,DAC ブロックの前に0.1 倍するゲインブロックを配置する。
57 Fig.5.30 に Sensor ブロックの内部を示す。変位センサの出力は電圧[V] な ので,センサゲイン(単位[mm/V]) を通じて距離[mm] の情報に変換する必要が ある。各センサ出力にセンサゲインをかけたあと,センサマトリクスゲイン KA(式())を乗算し,8 個の各ステータのギャップ情報および 4 個の傾きの情報に 変換する。その後にセンサオフセットを足し合わせ微妙な誤差を調整する。その 出力は変位としてフィードバックされる。
58
6. 結論
6.1. まとめ
高温・高真空で使用可能な搬送装置の開発を目的に,永久磁石を用いずに試料 を推進,上下運動可能な性能を有する高温環境下での使用を目的としたレアア ースレス磁気浮上搬送装置を提案した。 そして,有限要素法を用いた磁場解析ソフトにより実験装置の形状設計を行 ったところ,左右方向から吸引力を発生させ,上下方向の浮上力を得る方式では 十分な力が得られなかった。従って,上部ステータ形状を鉤状に曲げ,上方向か ら吸引する方式に変更することで,十分な浮上力が得られることが明らかにな った。また,ステータコアを曲げる際に角を直角にすると,その部分で磁束密度 が大きくなり浮上力に悪影響を与えることが明らかになった。角に丸みを持た せることで浮上力を約 6 %増加することができた。さらに,ステータの巻線を フロータとステータから離れた位置に巻いた場合と比較し,エアギャップに近 い位置に巻いた場合では,浮上力が約310 %増加することが明らかとなった。 提案した高温環境下での使用を目的としたレアアースレス磁気浮上搬送装置 の制御性能を確認するため,磁場解析の結果を基に実験装置を製作を行った。ま た,センサを動かすためのアンプボックスおよび磁気浮上型搬送装置を動作さ せるための制御モデルをMATLAB/Simulink を用いて作成した。59
6.2. 今後の展望
今現在,磁気浮上型搬送装置の浮上実験に取り組んでいるが,安定した浮上動 作が行えていないためゲインの調整や制御モデルの再検討を行い安定した浮上 動作を目指す。また,z 軸方向の位置のフィードバックが行えていないため Hall IC やレーザ変位計を用い z 軸方向の制御システムの構築を行う。 また,Model 3 の構成において有限要素法を用いた電磁界解析ではステータ の左右の磁気回路が分離されていない場合でもコイルをステータとフロータの 突極面近くに配置することにより z 軸周りのトルクを制御することができる結 果が得られたが安定化できるほどのトルクが得られるかの検証実験が行えてい ないためそちらも同様に検討を行う。 安定した浮上動作の道徳性が得られた暁には浮上推進制御を行い,実際に500 g の試料を乗せたうえで上下運動および推進運動可能か,高温環境下での動作は 可能であるか試作機の性能目標を満たしているか検討をしていく。60
謝辞
本研究を進めるにあたり終始熱意あるご指導とアドバイスを頂きました群馬 大学理工学部電子・情報理工学科 栗田 伸幸 准教授,群馬大学理工学部電子・ 情報理工学科 石川 赴夫 教授,群馬大学理工学部電子・情報理工学科 高橋 洋 平 技術職員に心から感謝とお礼を申し上げます。 最後に,本研究を進めるにあたり様々な協力や激励を頂きました栗田研究室, 石川研究室の皆様に深く感謝致します。61
参考文献
[1] 曲山 雄貴, 磯部 浩已, 超音波振動を利用した非接触ハンドリング装置によ るフラットパネル基板の搬送(第 5 報)基板上面をオープンスペース化したガ ラス基板の搬送, 精密工学会学術講演会講演論文集 2012S(0), 1137-1138, 2012 [2] 政木 慶次, 岡 宏一, 非接触搬送を目的とした静電気浮上装置の提案, 高 知工科大学知能機械システム工学科 [3] 磯部 浩已, 渡辺 拓, スクイーズ圧力と空気静圧力を組み合わせたガラス 基板の非接触搬送方法の開発(第一報)—傾斜する基板に作用する搬送力の数値 解析—, 精密工学会誌 Vol. 79 (2013) No. 9 p. 868-872 [4] 吉田 祐介, 岡 宏一, 永久磁石を用いた懸垂形磁気浮上装置の開発, 一般 社団法人日本機械学会, 講演論文集 2002(40), 345-346, 2002-02-21 [5] 石井 宏,成田 正敬,加藤 英晃,電磁石と永久磁石による薄鋼板のハイブ リッド磁気浮上システム-磁場の相互作用を考慮した最適配置散策に関する基礎的検討-,日本AEM 学会,日本 AEM 学会誌 Vol. 24,No.3 (2016)
[6] 小原 章,平田 勝弘,新口 昇,大野 勇輝,永久磁石型電流重畳可変磁束モ
ータの性能評価,日本AEM 学会,日本 AEM 学会誌 Vol. 24,No.3 (2016)
[7] 石野 裕二, 水野毅, ゼロパワー磁気浮上機構の性能向上とその
応用に関する研究, 埼玉大学大学院理工学研究科 (2014)
[8] Rafal P. JASTRZEBSKI , Pekko JAATINEN , Olli
PYRHÖNEN, Modeling and Control Design Simulations of a Linear Flux- Switching Permanent-Magnet-Levitated Motor, Mechanical Engineering Journal, Vol. 4 (2017), No. 5 pp. 17-00084-17-00084.
[9] 米津 武則,渡邉 健,鈴木 江里光,希土類系高温超電磁石搭載時の磁気浮
上式鉄道車両の起磁力制御に関する検討,日本 AEM 学会,日本 AEM 学会誌
62
本研究に関する発表論文
[1] 一場 雄太,栗田 伸幸,石川 赴夫,“磁気浮上型搬送装置の提案”,第 8 回 電気学会栃木・群馬支所合同研究発表会,(2018)
[2] 一場 雄太,栗田 伸幸,石川 赴夫,高橋 洋平,“磁気浮上型搬送装置の提 案”,第 27 回 MAGDA コンファレンス in Katsushika (MAGDA2018) ~電磁 現象及び電磁力に関するコンファレンス~,(2018)