機械力学1
2006年度
教授 保坂寛(新領域) , 非常勤講師 鈴木規之(新日本製鉄)
ティーチングアシスタント(TA)
新領域創成科学研究科環境学専攻修士1年
(柏キャンパス環境棟2階264号室)
石井智裕 [email protected] 04-7136-4623 江副亮介 [email protected] 04-7136-4623
1.機械振動学のための数学(保坂)
線形代数,線形常微分方程式 2.力学の基礎(保坂)
仮想仕事の原理,慣性能率,回転運動 3.1自由度系の振動(鈴木)
自由振動,減衰振動,強制振動 4.2自由度系の振動(鈴木)
自由振動,強制振動 5.ラプラス変換(保坂)
ラプラス変換の導出,振動計算への応用,オープンループ制御 6.ラグランジュの方程式(保坂)
直角座標の場合,極座標の場合,強制変位が働く場合 7.振動の応用(保坂,鈴木)
生物,情報機器,自動車,建築構造物,おもちゃの力学
教科書:保坂寛「機械振動学」,東京大学出版会
参考書:佐藤,岡部,岩田「機械振動学」,工業調査会 成績評価
コミュニケーションカード(裏に意見を書くこと.疑問,提案など)
演習発表
レポート(発表日の授業終了時に教員に提出)
中間試験(12/18),最終試験(3月上旬)
TA相談時間
演習問題の解き方が分からない場合は,発表日前の水曜正午まで に,TAにメールで質問内容を送ること.メールと電話で指導する.
柏の葉キャンパス つくばエクスプレス
秋葉原 つくば
本章では,機械振動学の基本となる減衰がない1自由度系の自由振 動を扱う.最も単純なものは,ばねで支えられたおもりが直線振動する 場合である.やや複雑になるが,回転運動も同一の式に帰着すること が出来る.また運動方程式は,力の釣合いとエネルギの保存から導出 できる.本章では,回転運動とエネルギ保存則に重点をおき,1自由度 系の自由振動を解説する.
2
.1自由度系不減衰系の自由振動
図2.1 ばね質点 系
m k
x
kx
図2.2 重力が作用するば ね質点系
m
k
y g
kx x
m && = −
ky mg
y
m && = − −
k y mg
x = + mx&& = −kx
2.1 力の釣合いによる運動方程式の導出と解の求め方
ばね力と慣性力の釣合い
変数変換
重力によるばねの縮み
x
2 = 0
+ x
x&& ωn ωn = k / m
t
x1 = cosωn x2 = sin ωnt t B
t A
x = cosωn + sin ωn
t i n
e
x3 = ω x4 = e−iωnt t
i
x5 = cosh ωn x6 = sinh iωnt kx
x
m && = −
2階微分方程式 基本解,斉次解
一般解
2回微分して元に戻る関数 指数関数
双曲線関数
運動方程式
−1
= i
Xo,φoを任意定数とすれば,式(2.13)を一般解と見ることもできる.
( )0 A x0
x = =
( )0 B v0
x& = ωn =
v t t
x
x n
n
n ω
ω ω sin
cos 0
0 +
=
( 0 )
0 cos −φ
= X ω t
x n
2 2
2 2 0
0
0 v A B
x X
n
+
⎟⎟ =
⎠
⎜⎜ ⎞
⎝ +⎛
= ω ⎟⎠
⎜ ⎞
⎝
= ⎛
⎟⎟⎠
⎜⎜ ⎞
⎝
= ⎛
A B x
v
n
arctan arctan
0 0
0 ω
φ
初期条件.時刻0における変位xoと速度vo
t B
t A
x = cosωn + sin ωn
一般解
t B
t A
x& = − ωn sin ωn + ωn cosωn
ωn:固有角振動数,固有角周波数,固有振動数
x0
A =
n
B v
ω0
=
(2.13)
2
2
1 mx
T = &
2
2
1 kx U =
(T + U ) = 0
dt d
(mx + kx) = 0
x& &&
= 0
x& mx&&+ kx = 0
2.2 エネルギ保存則による運動方程式の導出
図2.1
m k
kx x 運動エネルギT
ひずみ(位置)エネルギU
TとUの和は 時間的に不変
x x dt m
dT = & &&
x dt kx
dU = &
( 0 )
0 cos −φ
= X t
x ωn
( )
{ 0 0 }2 02 2
2
max 2
sin 1 2
1 2
1
n n
n t mX
X m
MAX x
m MAX
T ω ω = ω
⎥⎦⎤
⎢⎣⎡ − −
⎥⎦ =
⎢⎣ ⎤
= ⎡ & φ
( )
{ 0 0 }2 02
2
max 2
cos 1 2
1 2
1 kx MAX k X t kX
MAX
U n =
⎥⎦⎤
⎢⎣⎡ −
⎥⎦ =
⎢⎣ ⎤
= ⎡ ω φ
2 0 2
2
0 2
1 2
1 mX ωn = kX
m k
n2 = ω
エネルギ保存則を使った別の計算法
質点が正弦波状に振動すると仮定 振幅Xo,周波数ωn,位相φoは不明
→ 運動エネルギの最大値=ポテンシャルエネルギの最大値 エネルギが保存
(2.21)に代入すれば一般解 (2.21)
エネルギ保存則を使った2つの解法を示したが,両者はだいぶ様子が異なっている.
後半の解法では,最終的に求まったのはω
nだけである.これは,使った条件が Tmax=Umaxという1つの式だったためである.ωnを式(2.21)に代入すれば一般解を得 られるが,これは解を3角関数で仮定し,さらにωn,Xo,φoを未知数としたからであ る.もし解を三角波で仮定したら,波形はもちろん,ωnも異なる値になってしまう.ま たXoとφ
oを未知数としなければ,一般解にならない.一方前半の解法では,解の仮 定は一切用いずに運動方程式が得られた.T+U=一定という1つの条件しか用いて いないにも関わらず,すべての情報が得られた.これは,T+U=一定が任意の時刻で 成り立つとしているからである.任意の時刻だから実質的に無限個の条件を示してい るのである.一方後半の計算では,Tmax=Umaxはピークの一瞬での条件,周期現象だ から実質的に1つの時刻での条件にすぎない.なお,複雑な系では,エネルギを時間 の関数として表すのが難しいが,最大変位は推定できることがあり,そのような場合 には後者の方法が有効である.代表的なものにレイリー法と呼ばれる計算法がある.
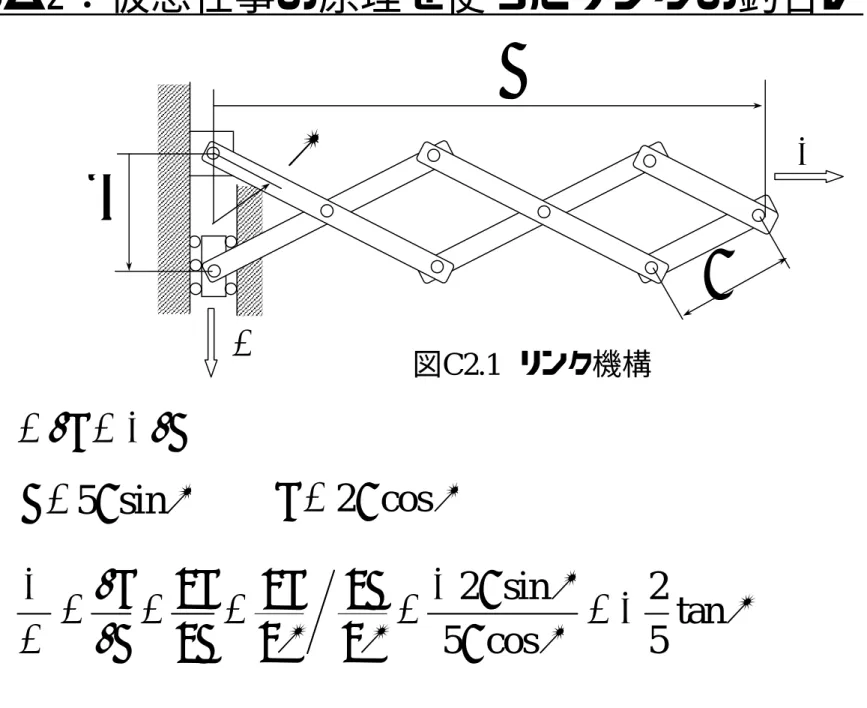
図C2.1 リンク機構
G
y θ
x
F
a
x F y
Gδ = δ θ 5asin
x = y = 2a cosθ
θ θ θ θ
δ θ
δ tan
5 2 cos
5
sin
2 = −
= −
=
=
= a
a d
dx d
dy dx
dy x
y G
F
コラム2:仮想仕事の原理を使ったリンクの釣合い
θ θ sin cos
) 2 /
( f a = Aa
部材1,点P回り
部材2,点Q回り ( f / 2)acosθ + Aasinθ = −( f / 2)acosθ +Casinθ θ θ
θ
θ sin ( / 2) cos sin cos
) 2 /
( f a +Ca = − f a +Wa
部材3,点R回り
C A
B = + C W
D = +
部材2,力の釣合い 部材3,力の釣合い
f/2
W
f/2 f/2
f/2
A
A B
C D
点P 点Q
点R 部材1
部材2 部材3
力の釣合いによる解法
θ&&
r a =
dm r
dN = 2θ&&
∑ ∑
= =
=
= n
i
n i
i i
i r dm
dN N
1 1
2θ&&
θ
θ&& r dm I &&
dN
N = ∫V = ∫V 2 =
∫
= Vr dm
I 2
mr2
I =
N dm
V r
図2.5 広がりのある物体 回転中
心
図2.3 回転する質点 dN r
θ
a 回転中心 dm
図2.4 多数の質点
r2 r1
r3
dm1
dm2
dm3
N O
トルク=(慣性力)×(腕の長さ)
慣性能率
慣性モーメント
dm r
adm = θ&&
= 慣性力
集中質量
∑=
= n
i
i i dm r
1
θ&& 2
回転運動の基礎式(
2.3.1慣性能率)
図2.6 円板の慣 性能率
R
dθ r
dr dm
ρ 厚さ 密度
h
dr rd
h
dm = ρ ⋅ θ ⋅
( )
∫
∫ =
= Vr dm V r hrd dr
I 2 2 ρ θ
π ρ
θ
ρ π 2
4
2 4
0 0
3 ⋅ = ⋅ ⋅
⋅
= h ∫R r dr ∫ d h R
2 2
1 2
1 4 2 2 R2
m R
hR
hR = ⋅ = ⋅
= πρ πρ
Rが大きいほど(薄くて広いほど)Iは大きい.
円板の慣性能率
mr2
I =
集中質量の慣性能率
回転中心 r m
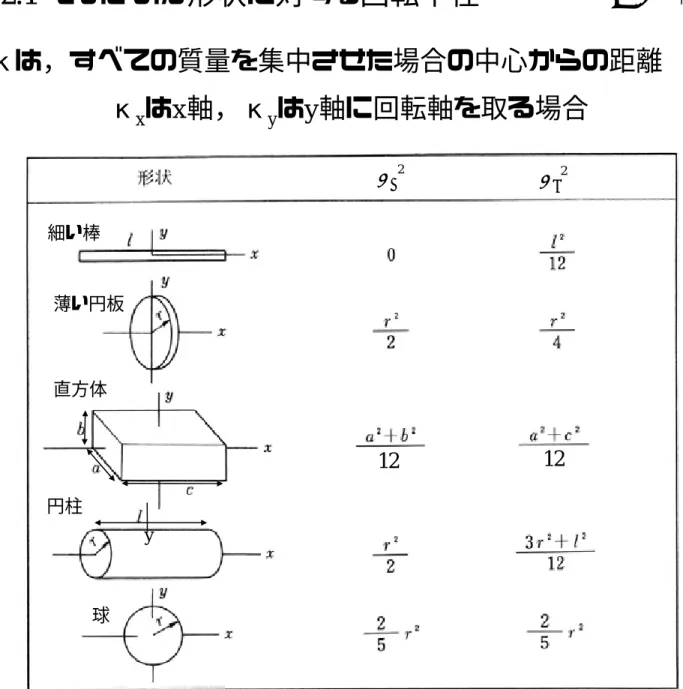
表2.1 さまざまな形状に対する回転半径 (I = mκ 2)
y 細い棒
薄い円板
直方体
円柱
球
2
κx κy2
12 12
κは,すべての質量を集中させた場合の中心からの距離 κxはx軸,κyはy軸に回転軸を取る場合
y x
z I I
I = +
≈ 0 z
(y z )dm y dm
Ix = ∫V 2 + 2 ≈ ∫V 2
(z x )dm x dm
I y = ∫V 2 + 2 ≈ ∫V 2
( ) x y
z V x y dm I I
I = ∫ 2 + 2 ≈ +
薄い板の慣性能率
G
x
y z
図2.7 薄い剛体の慣性能率
y x
z I I
I = +
dm r
I = ∫V 2
2
2 z
y
r = +
d G z’ z
y x
図2.8 md2
I Iz′ = z +
[ x d y ]dm
Iz′ = ∫V ( − )2 + 2
重心以外の慣性能率
=重心の慣性能率+md2
( )
∫ +
= V x2 y2 dm
+ d 2 ∫V dm
− 2d ∫V xdm
Iz
← m d 2
←
← 0
重心を通らない軸回りの慣性能率
N
Iθ&& =
ω
θ& =
dt N
dL =
N dm
V r
図2.5 広がりのある物体 回転中
∫ 心
= Vr dm
I 2
mr2
I =
慣性能率
慣性モーメント 集中質量
ω 角運動量
θ I I
L = & =
θ 角度 角速度
角運動量の法則
Iが時間の関数でも成り立つ
3次元運動でも成り立つ.L,ω,Nはベクトル
コラム3 3次元運動における角運動量の法則
v r
L = m × L = N
dt d
r m L v
O z
x y
図C3.1 3次元空間の角運動量 θ
v sinθ
f N
慣性能率が変化しても成り立つ
N dt I
dL = θ&& =
θ&
I L =
2次元の場合
慣性能率一定の場合
dt N dL =
角運動量
f r N = ×
トルク
θ&
r v =
dm r
v dm
dT 2 2 2
2 1 2
1 ⋅ = θ&
=
∑ ∑
= =
=
= n
i
n i
i i
i r dm
dT T
1 1
2 2
2
1 θ&
2.3.2 回転の運動エネルギ
N dm
r V
図2.11 広がりのある物体
v
図2.9 回転する質点
r
θ dm
回転中心
dmi
vi
図2.10 多数の質点
ri O
2 2
2
2 1 2
1 θ& r dm Iθ&
dT
T = ∫V = ∫V =
∫
= Vr dm
I 2 慣性能率
図2.12 回転と並進がある円板
ω r
θ
θ ωcos r
θ ωsin r
ω
θ& =
θ
dm
vG
vy
vx
r
θ ω sin r
v
vx = G − θ ω cos r
vy =
(v v )dm
dT x2 y2 2
1 +
=
∫
= VdT T
∫
= VG2 Vdm 2
1
I
2
2 1ω
←
円板の運動エネルギ
∫
+ 2 Vr2dm 2
1 ω
∫
−VGω Vr sinθdm
m VG2 2
← 1
← 0 2 2 2
1 2
1 mV Iω T = G +
( )
∫ + −
= V VG r ω 2VGrωsinθ dm 2
1 2 2 2
θ rsin θ
r
図C4.1 平面上を渦巻状に移動する質点
r
m v
(a) 糸が柱に巻きつく場合
r
v
m
(b) 糸を下から引く場合
コラム4 エネルギ保存則と角運動量保存則の応用
エネルギー保存
const r
v
const mv
=
=
= ω
2
2 /
r m
ω v,
角運動量保存(トルクが加わらない)
慣性能率
r m
ω v,
ω
I
L = = N = 0
dt dL
mr2
I =
const mr
Iω = 2ω =
r r
ω
const r2ω =
角運動量保存 エネルギー保存
const rω =
ω
(mv r)a
T = 2 トルク
r mv2 a
v
遠心力
図C4.2 円と渦巻きからなる経路 渦巻き 円
const mrv
L = sinθ =
θ
const rv =
円上