食変光星
DX Aqr の観測と連星 2 星
の質量・半径・光度推定
13S1-081 矢野 あすか
2 1 要旨 ... 3 2 食変光星 ... 4 2.1 変光星とは... 4 2.2 食変光星とは ... 4 3 観測対象の性質 ... 5 4 観測 ... 7 4.1 使用機器 ... 7 4.2 観測手順 ... 8 4.3 観測データ... 8 5 画像処理・解析 ... 9 5.1 ダークフレーム補正 ... 9 5.2 光度測定 ... 10 5.3 光度曲線 ... 11 6 第一次結果 ... 12 7 第二次解析 ... 25 8 質量・半径推定 ... 36 9 考察 ... 37 10 補遺 ... 39 11 謝辞 ... 49 12 参考文献 ... 50
3
1.
要旨
本研究は,食変光星DX Aqr の観測から光度曲線をプロットし,そこから連星の 2 つの星 の質量・半径・光度を求め,考察することを目的に行った.明星大学天文学研究室で,過 去にも食変光星の観測が行われていたが,光度曲線にすると,観測点が離散的に並んだ結 果であり,よりデータを増やして観測すべきとの見解を知った.そこで今回は,①できる だけ多く撮影する②グラフにしたとき,なめらかに繋がっている曲線であり,食の位相幅・ 様子がわかるデータにすることも目標にして観測に挑んだ. 観測には,明星大学天文台を使用し,撮像をパソコンソフトのステライメージ 7 で測 光し,先行研究による周期0.9450106 日ごとに折り返して位相にし,光度曲線を作成した. 観測の結果,周期中すべての時間帯の観測はできなったが,目標を満たす光度曲線を作 成することに成功した.得られた位相幅と減光量から,連星それぞれの質量が 3.8𝑀⨀, 2.1𝑀⨀(𝑅⨀:太陽質量)であり,それぞれの半径が3.8𝑅⨀,2.1𝑅⨀(𝑅⨀:太陽半径),光度 がそれぞれ2.1 × 102𝐿 ⨀,1.9 × 10𝐿⨀(𝐿⨀:太陽光度)であると求められた.また,第 3 星を写 真で確認し,解析することができた.4
2.1 変光星とは
時間の経過とともに明るさが変わる星のことを変光星という.現在発見されている変光 星は3 万個以上あり,数時間で変光するものもあれば,数ヶ月,1 年,さらに何十年など, 星によって変光の周期は様々で,周期に規則性がないものもある.変光星は,爆発型変光 星、脈動変光星、回転変光星、激変星、食変光星,X 線変光星の6種類に分類されている.2.2 食変光星とは
2 つ(以上)の恒星が引力を及ぼし合って,共通重心を回っている天体を連星という.連 星の軌道面が地球と連星を結んだ直線を含む平面上に存在する場合、星が隠れたり現れた りする食が起きる.図のように,星の位置によって明るさが周期的に変化する.このよう な連星を食連星という.一般的に,恒星自身の明るさ自体は変わらず,規則的な周期があ ることが特徴である. 食は一度の周期で 2 回起こり,暗い星(伴星)が明るい星(主星)を隠す主極小と,明 るい星(主星)が暗い星(伴星)を隠す副極小がある.今回の観測対象はこの食変光星で ある. 図 1 食変光星の様子5
3.観測対象の性質
今回の目標星は,観測時期が適している天体であること,周期が1~2 日未満の短周期で あること,比較となる星が近くに複数存在すること,なるべく明るい星であることを重点 に置いた結果,DX Aqr に決定した. 観測を行うにあたり,AAVSO(アメリカ変光星観測者協会)か目標天体の観測用星図を 入手した(図2). 図 2 AAVSO DX Aqr の星図6 【赤経】22h 2min 26.25s 【赤緯】-16°57’ 53.4’’ 【変更範囲】6.43-6.88V 【周期】0.9450106 日 また,目標天体の周りに標準星を4つ設定した.それらは(図 2)に示される.Aladin によ ると,左上から標準星1 10.17 等級,標準星 2 8.55 等級,標準星 3 9.82 等級,標準星 4 9.72 等級というデータが得られた.これらは全て V バンドである. なお,文献によれば,DX Aqr は実視連星としても知られている.食連星を形成する 2 つ の星の他に,食連星から3.7″角離れた位置に 7.4 等の第 3 の星が存在する.今回の観測で は,食連星と第3 星は,一体のものとして,3 つの星の合計の明るさを測定した.その結果, 得られた光度曲線は,食連星の明るさの変化に,第3 星の明るさが常に足されたものにな っている.第3 の星の明るさは,得られた光度曲線の解釈をする際に考慮することにした.
7 図 3 冷却 CCD カメラ
4.観測
4.1 使用機器
1. リッチークレチアン式反射望遠鏡 明星大学30 号館 R 階の屋上に設置されている反射望遠鏡を使用した.望遠鏡と連動 しているパソコンソフトに目標天体の座標を入力すると,自動でその方向に合う. 2. 冷却 CCD カメラ 冷却CCD カメラとは,CCD イメージセンサを 低温で動作させ,高感度・低ノイズの画像を得る ことを目的としたデジタルカメラの一種である. CCD カメラでは,光入力のない状態でも信号出力 があり,天体観測など低照度長時間露出の場合に 雑音(ノイズ)が発生し,問題となる.これは, 温度が高いほど大きな影響があり,熱雑音とも呼 ばれる.CCD を冷却することで,熱雑音を減らし, 高𝑆 𝑁⁄ 比・低ノイズな画像を得る.本研究には,ビ ットラン社のBN-82L を使用した.CCD 素子に は,KAI-16070 型が搭載されている。撮影にはジ ョンソンV フィルターを使用した. 図 3 リッチークレチアン式反射望遠鏡 【口径】40cm 【焦点距離】2800cm8
観測は以下の手順で行った.
① 冷却 CCD カメラを気温の-20℃に設定し,冷却処理をする. ② 目標天体の座標を設定し,フォーカスを合わせる. ③ 露出時間,撮影枚数,撮影間隔時間を設定する.露出時間は後で記述するが,撮影は その日に可能な限り撮影し,撮影間隔は毎回30 秒に設定した.④
目標天体を観測し終わったら,ダークフレームを同じ露出時間・冷却温度で10 枚撮影 する.4.3 観測データ
今回の研究では,2016 年 10 月 14 日から 2016 年 12 月 9 日までの間で,合計 9 日間観 測した.天気が不安定で観測に適しない日が続く時ことがあったため,観測可能な日には, 可能な限り撮影するようにした.撮影した合計枚数は2751 枚に至った.このうち,画像に 雲が掛かったり,ノイズが多く入ったり,解析に不適切と判断したものを省いて解析する. (表 1)が観測日,観測条件等のまとめである.日にち
時間
気温(℃)
湿度(%)
枚数(枚)
露出時間(秒)
10月14日 19:32~22:51
14℃
57%
268
3.5
10月15日 18:40~18:58
16.9℃
50%
36
3.5
10月24日 19:47~22:47
13.2℃
58%
370
3.5
11月4日
20:18~22:46
11.8℃
58%
307
3.5
11月5日
18:39~22:54
16.8℃
56%
509
3.5
11月9日
17:58~21:18
13.2℃
38%
378
3.5
11月20日 18:56~23:34
13.7℃
80%
379
4
11月25日 17:40~20:04
8.9℃
57%
300
4.5
12月9日
17:37~19:16
13.4℃
41%
204
4
表 1 撮影記録9 図 4 ダークフレーム
5.画像処理・解析
5.1 ダークフレーム補正
ダークフレームとは,撮像素子にまったく光を当てない状態で撮像してカメラ固有のノ イズだけが記録された画像のことである.ダークフレームを撮像した画像から引き算する ことで,ノイズをキャンセルすることができる.(図 5)がその一例である.10 画像の解析には,パソコンソフトのステライメージ 7 を使用した.ダーク補正した画像 を使い,(図 6)のように標準星一つ一つをカーソルで囲い,それぞれの等級を打ち込む.そ して目標天体にカーソルを合わせると,標準星と比較したときの等級が得られる.この工 程を一枚一枚すべての画像に行う. また,観測時間をすべてユリウス日に変換する.ユリウス日とは,紀元前4713 年 1 月 1 日の正午(世界時)からの日数を数字的に表したもので,変換はすべて日本標準時とする. 図 5 測光の様子
11
5.3 光度曲線
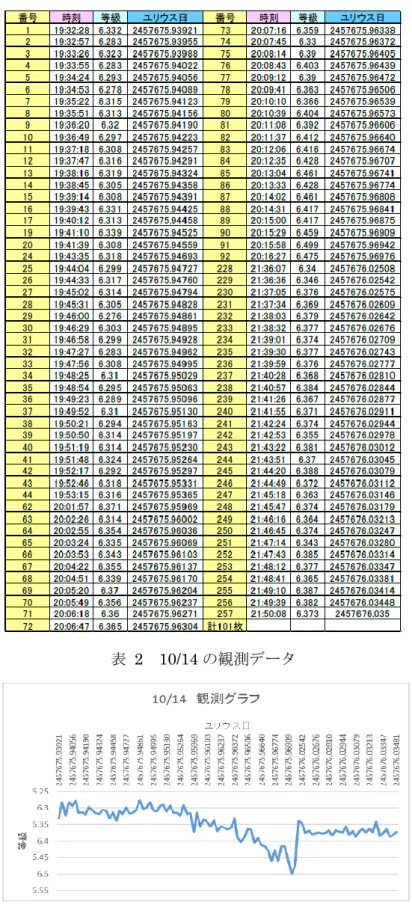
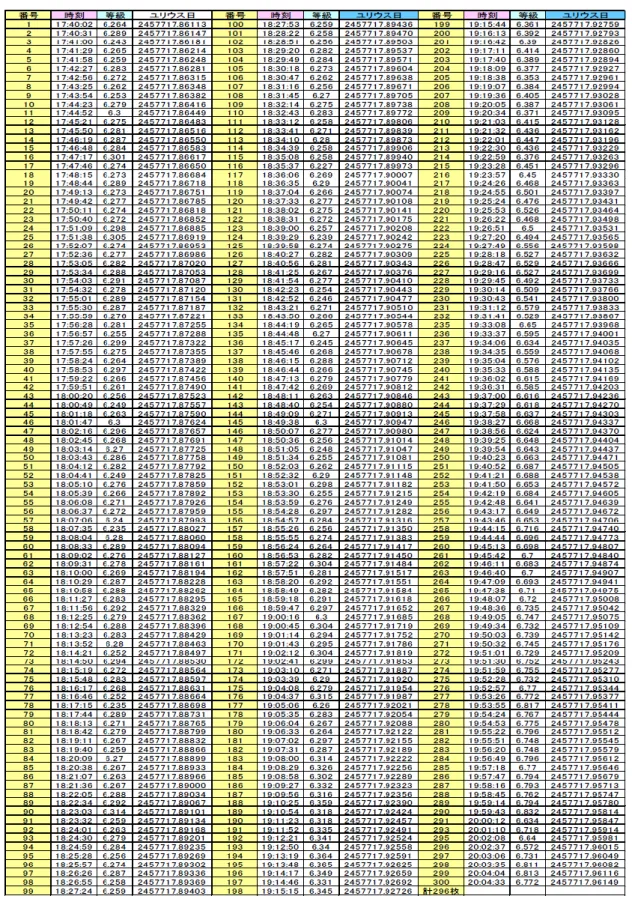
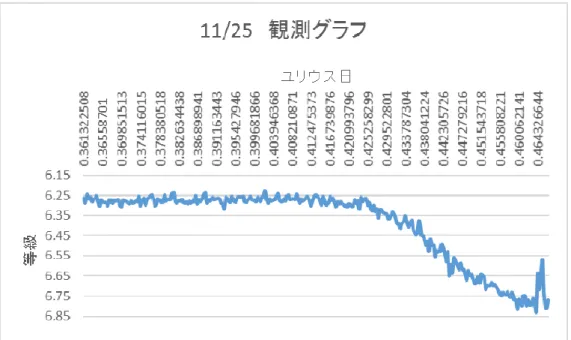
1 周期である 0.9450106 日を用い,観測の時刻を位相(0 ≤ 𝛼 ≤ 1)で表し,光度曲線を 作成する. まず,元期を求める.元期は基準になる日のことで,初日に観測した一番はじめのユリウ ス日とする.(図の黄色いセルが元期である)次に,それぞれのユリウス日から元期を引き, この値を,今度は周期で割る. ここで得られるデータの整数部分は何周期目かであり,位相の範囲は0 ≤ 𝛼 ≤ 1だから,小 数点以下のデータを求める. 得られたそれぞれの位相の値と等級をプロットする. 図 6 エクセルでプロットの様子12 光度測定したデータをまず1日ごとにグラフとして作成した.それらの結果は,10/14(表 2 図 8),10/24(表 3 図 9),11/04(表 4 図 10),11/05(表 5 図 11),11/09(表 6 図 12), 11/20(表 7 図 13),11/25(表 8 図 14),12/09(表 9 図 15)に示す.図の縦軸は等級で,横 軸は撮影した時間をユリウス日(日本標準時)で表したものである.参考までに,撮影した日 時ごとの等級とユリウス日を表にした.
13 10/14
表 2 10/14 の観測データ
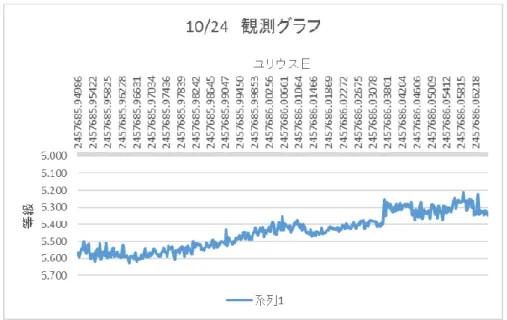
14 表 3 10/24 の観測データ
15 図9 10/24 の観測グラフ
16 表4 11/04 の観測データ
17 11/05
表5 11/05 の観測データ
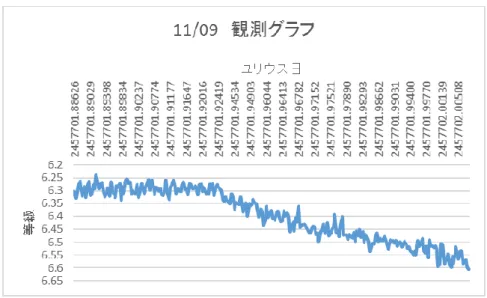
18 表6 11/09 の観測データ
19 図12 11/09 の観測グラフ
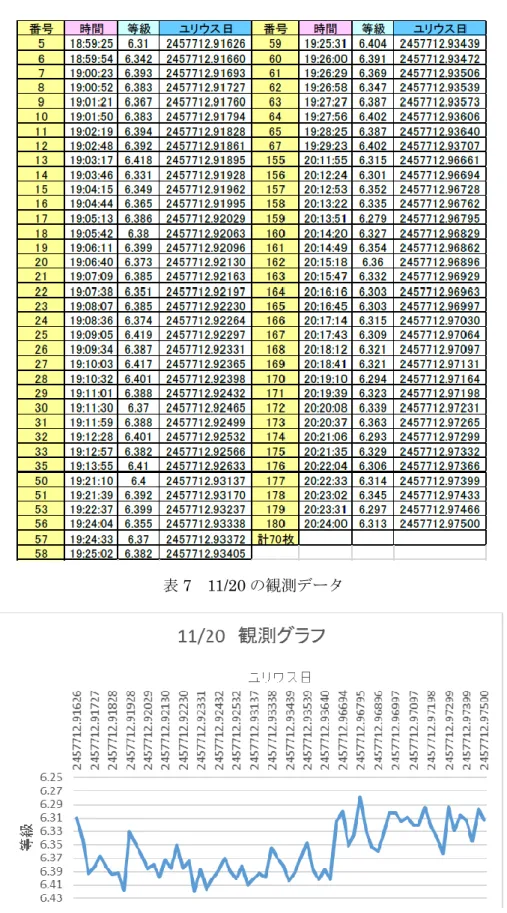
20 表7 11/20 の観測データ
21 11/25
23 12/09
表9 12/09 の観測データ
24 得られた光度曲線を見ると,細かい±0.2~0.3 等の出入りを除いた大きな構造としては, 次の4 つのものがある.位相の小さい方から書くと, ① 位相 0.01~0.02 付近の急激な減光 ② 位相 0.1~0.2 付近の緩やかな浅い減光 ③ 位相 0.42~0.45 付近の急激な深い減光 ④ 位相 0.5~0.7 付近の緩やかな深い減光 である.普通,食連星においては明るい方の星が暗い方の星に隠される相対的に深い食と, 暗い方の星が明るい方の星に隠される相対的に浅い食が,位相0.5 ずれた位置に 2 回現れる. しかし,図16 には,4 回食のような構造が見えており,不自然である.そのため,これら の構造が,天体本来の変化ではなく,観測条件の変化によってもたらされた可能性がない か,観測データをより詳しく見る第二次解析を行った. 図16 光度曲線
25
7.第二次解析
4 つの構造に対し,食連星と第 3 星の明るさの関係を調べた.まず,16 箇所ほどポイン トを定める.それぞれの場所を①~⑮とし,それぞれのエリアから 1 枚ずつ画像を解析し ていく.ポイントの位置と使用した写真は(表10 図 17)の通りである. 表10 ポイントの位置 図17 ポイントの位置の図示26 階調が整えられた目標天体上に食連星の星像と第3 星の星像の中心を通るように斜めに 直線をひき,直線上でカウントされた明るさをグラフにして表した.それらを図にまとめ た(図18~図 30).また,冷却 CCD カメラのアプリケーションで画像を見ると,星が 2 つ写っていることがわかるため,参考として併せて載せる. この結果を見ると,④と⑩~⑫にあたる第Ⅱの構造と第Ⅳの構造は,片方の星が相対的 に暗くなっているのに対して,①~④と⑦~⑨にあたる第Ⅰの構造と第Ⅲの構造では,2 つ の星の明るさの比があまり変わらないように見える.もし,これらの構造が本当に減光し たことによるものなら,2 つの星が連動して暗くなるなどということは考えられないので, 第Ⅰ・第Ⅲの構造は観測時の空の状況の変化による可能性が大きいと思われる.
33 そこで,標準星の明るさの変化を確認した.図は10/14(およそ位相 0~0.1)と 11/25(お よそ位相0.35~0.48)の標準星のカウント値である.画像には標準星 3(9.82 等級)以外 の標準星が写っていたため,標準星1・標準星 2・標準星 4 のカウント値を対数関数グラフ に表した(図31 図 32). その結果,折れ線の変化の仕方が連動していない箇所も確認できた.このことから,空 全体の明るさが均一でないことがわかるため,第Ⅰ・第Ⅲの構造は空の状況の変化による ものと結論づけた.
34 区間では,標準星のカウント値が大きく動いている。
図 8 11/25 のカウント値。3 つの標準星のカウント値の時間変化を示した.構造Ⅲの 区間では標準星のカウント値が揺れ動いていることが見える.
35 ここで,第Ⅰ・第Ⅲの構造をのぞいた光度曲線を改めてしめすと,(図33)の結果が得ら れた.この光度曲線には第3 星の明るさは考慮していない. 結果から,位相0~0.2 付近の減光を副極小,位相 0.5~0.7 付近の減光を主極小とする. 食の入りを位相:0.48,6.278 等級,食の中心を位相:0.61,6.627 等級として,食の入り から中心の位相幅を0.13 とする.また副極小の減光幅を 0.17 等級とし,主極小の減光幅を 0.35 等級とする.(図 34) この結果をもとに,計算に移ることにする. 図33 訂正した光度曲線 図34 光度曲線から得られた数値を図示
36 より,2 つの星の質量を求める. 補遺で述べられた方法では, ① 連星周期から, 連星間の距離と2 つの星の質量の関係(ケプラーの第 3 法則) ② 食の深さから, 2 つの星の光度と半径の関係 ③ 食の長さから, 連星間の距離と2 つの星の半径の関係 が得られ,それらから食連星の2 つの星の質量を求める. また,補遺の計算では,2 つの星が主系列星であるとし,半径は質量に比例すること,及 び,光度は質量の四乗に比例することを仮定している.これらの仮定を用いると,2 つの星 の半径と高度も推定できる.なお,計算においては,連星周期𝑇 = 0.9450106日(GCVS から の数値であるが,次の考察で述べるように,今回観測した食の位相は,この周期とほぼ矛 盾のないものだった),食の深さΔ𝑚Ⅰ= 0.35(今回の観測結果),食の深さΔα = 0.13(今回の 観測結果)の数値を用いた. 結果は以下の通りであった. 主星 〔質量〕3.8𝑀⨀ (7.614 × 1031𝑘𝑔) 〔半径〕3.8𝑅⨀ (2.664 × 106𝑘𝑚 ) 〔光度〕2.1 × 102𝐿 ⨀(8.005 × 1028𝐽) 伴星 〔質量〕2.1𝑀⨀ (4.167 × 1030𝑘𝑔) 〔半径〕2.1𝑅⨀(1.458 × 106𝑘𝑚) 〔光度〕1.9 × 10𝐿⨀(7.466 × 1027𝐽) ここで, 𝑀⨀= 1.989 × 1030𝑘𝑔 𝑅⨀= 6.960 × 108𝑘𝑚 𝐿⨀= 3.839 × 1026𝐽 である.
37
9.考察
今回の観測では,目標としていた食の様子を確認することができた,食が観測できたの は,1 周期分のみであることと,位相の 0.7 付近~1 までの範囲の撮影を行えなかったが, ほぼ連続的なデータを得ることができた. 二次解析で述べた構造Ⅰと構造Ⅲの減光について改めて考察する.まず前提に,目標天 体の観測を始める予定時期が 9 月中旬頃からで,22 時台に南中するため,観測し易い時期 だったのだが,天気が不安定で,雨が続く日も多く,観測時期が後ろ倒しとなってしまっ た.そのため 11 月 25 日に関していえば,減光が確認される時間帯は,高度が 42°以下で 空の低い位置にいたため,光害の影響もあるのではと考える.10 月 24 日に関しては,グラ フで曲線が途切れているが(20 時 16 分から 21 時 21 分の間),雲がかかっていて測光でき なかった.減光している時間帯の画像には,雲などは確認できなかったが,その時から薄 い雲がかかっていて,測光に誤りが生じた可能性がある.どちらも何度解析し直しても同 じ結果になるため,明確には確定できないが,これらの原因が大きいのではないかと考え る. このような天候による減光であることを確認するためには,測光つど標準星のカウント 値を確認し,それぞれの標準星の比が一定であるかチェックすると,スムーズに曲線の作 成に移行できるであろう. 光度曲線の全てを完成させるには,早い段階で自分が観測したデータから元期を決め, 観測予定の日時をユリウス日に変換して元期を引き,周期で割ることで,おおまかに位相 のどの位置にくるデータを観測することになるのか把握できる.また,光度曲線上での観 測データの疎密など,偏りを把握することもできる.今回,このことに気づいたのが遅く, それまで観測可能な日に行っていたので,今後この点を考慮して観測すれば,より連続的 で,曲線の重ね合わせの多い,良いデータが作成できるであろう. 光度曲線を作成してから,GCVS の元期を基にした極小予報で,今回の極小との誤差を調 べた. 極小予報とは,いつ極小が来るのかを計算から導いたものである. 極小時刻=元期+周期×周期回数 =𝐸0+ 𝑃 × 𝐸 として表すことができる.全て日本標準時のユリウス日で表す.周期回数は、対象の日か ら元期を引いたものを周期で割ったものの整数である.38 35 秒で,約 1 時間 10 分ほど遅い時間の極小になった.しかし,位相では 0.05 のずれであ り,ほぼ極小予報と誤差がない結果であった. 本研究では,食変光星の変光の様子を光度曲線と,第 3 の星との位置関係の様子の写真 の 2 つの要素から確認することができた.数ヶ月にわたる観測や解析には骨を折る思いだ ったが,本研究室ではまだあまり食変光星の連続した光度曲線の作成には至れてなかった ので,今回の結果は新たな一歩を踏み出せたのではないかと考える.また明星大学の望遠 鏡でこのような実視連星をはっきり写せることも分かったので,他にも存在する実視連星 など,複雑な構造の星の観測も行い,更なる発見をしていってほしい.
39
10.補遺
井上教授によると,質量・半径の推定は、以下の通りである. 質量𝑀1と質量𝑀2の星がそれぞれ中心から距離𝑎だけ離れて,互いの重心の周りを回転角 速度Ωで回っているとし,回転周期をΤとする. また,連星の二つの星の質量,半径,観測される明るさ(地球上観測装置が受け取る単 位 面 積 あ た り 、 単 位 時 間 あ た り の 放 射 エ ネ ル ギ ー 量 ) を そ れ ぞ れ 𝑀1,𝑅1,𝐹1と 𝑀2,𝑅2,𝐹2とする. ここで,質量の大きい方の星を星1 とし,もう一つを星 2 とする.そして,この 2 つの 星とも,主系列星であると仮定する.主系列の星では,星の半径はその質量にほぼ比例す るので,𝑅
1= (
𝑀1 𝑀⨀) 𝑅
⨀𝑅
1= (
𝑀2 𝑀⨀) 𝑅
⨀}
(1) と近似できる.ここで,𝑀⨀と𝑅⨀は太陽質量と太陽半径で, 𝑀⨀= 1.989 × 1030 [ kg] 𝑅⨀= 6.960 × 108 [𝑚] 図 9 連星間の様子40 また,V-バンドでは,𝐹はほぼMの 4 乗に比例するので,
𝐹
1= (
𝑀1 𝑀⨀)
4𝐹
⨀𝐹
2= (
𝑀2 𝑀⨀)
4𝐹
⨀}
(2) と近似する.ここで𝐹⨀は太陽 それぞれの星の中心の,重心からの距離を𝑟1, 𝑟2とすると,𝑟
1=
𝑀2 𝑀1+𝑀2𝑎
𝑟
2=
𝑀 𝑀1 1+𝑀2𝑎
} (3) である。 それぞれの星の回転軌道は、円であると近似すると、これらの星の回転角速度Ωは,一定 値で,Ω =
2𝜋T(4) である. 星1 に着目すると,星 1 が重心の周りを回るときの遠心力は, 𝑀1𝑟1Ω2,一方𝑀2から受 ける重力は,𝑀
1𝐺𝑀2 𝑎2 で,両者はつりあっているはずだから,𝑀
1𝑟
1Ω
2= 𝑀
1𝐺𝑀
2𝑎
2 (5) である. ここで,𝐺は,万有引力定数で,41
𝐺 = 6.67408 × 10
−11𝑚
3𝑘𝑔
−1𝑠
−2 である. (1)式を(3)式にいれ、さらに(2)式によりΩをΤに置き換えて整理すると,𝑎 = [
𝐺(𝑀1+𝑀2) (2𝜋)2𝑇
2]
1 3(
6)
を得る. 𝑇は,観測データより,𝑇 = 81648.91584 [𝑠]
とする. 簡単のため,われわれ観測者は,2 つの星の回転面上の遠方にいると仮定する.すると, 片方の星があいての星を隠す食は,1 周期の間に,星 1 が星 2 を隠す時と,星 2 が星 1 を 隠す時の2 回起こる.ここで,星 2 が,星 1 の前を横切る方の食を食Ⅰ,星 1 が星 2 を隠 す方を食Ⅱと名付ける.又,この連星の観測には第 3 星の明るさも足されているので,そ の星を星3 とする. まず,食でないときの連星の明るさを𝐹0とすると,𝐹
0= 𝐹
1+ 𝐹
2+ 𝐹
3(7) である. 食Ⅰの時は,星 1 の手前に星 2 がいるので,星 1 の明るさが星 2 に隠された分だけ暗く なる. 図 10 食Ⅰの様子42 の円のどこからも同じ強度でやってくると近似すると,π𝑅2 の断面積をもった星 2 で隠さ れた部分の強度は,
(
π𝑅2 2 π𝑅12) 𝐹
1となる.よって,食Ⅰの極小時の明るさを𝐹Ⅰとおくと,𝐹
Ⅰ=
(1 −
π𝑅22 π𝑅12) 𝐹
1+ 𝐹
2+ 𝐹
3(8) である. 食でない時の連星の明るさ𝐹0からの減光量を△ 𝐹Ⅰとおくと,(5)(6)式より,△ 𝐹
Ⅰ= 𝐹
0− 𝐹
Ⅰ= (
𝑅2 𝑅1)
2𝐹
1(9) が得られる. 一方,食Ⅱの時は,𝑀2は𝑀1の後ろに隠れることになるので,食Ⅱにおける極小時の明る さ𝐹Ⅱは,𝐹
Ⅱ= 𝐹
1+ 𝐹
3(10) となり,その減光量△ 𝐹Ⅱは,△ 𝐹
Ⅱ= 𝐹
0− 𝐹
Ⅱ= 𝐹
2(11) となる. ここで,△ 𝐹Ⅰと△ 𝐹Ⅱを比較する. (1)(2)式を(9)(10)式に代入する.△ 𝐹
Ⅰ= (
𝑀2 𝑀1)
2𝐹
1(12)△ 𝐹
Ⅱ= (
𝑀2 𝑀1)
4𝐹
1(13) となるから,𝑀1>𝑀2の時は,43
△ 𝐹
Ⅰ>
△ 𝐹
Ⅱ すなわち,食Ⅰの方が食Ⅱより深い食(主極小)となることがわかる. さて,食でない時の連星の等級をm0,食Ⅰの時の極小時の等級をmⅠとおくと,𝑚
0= −2.5(log 𝐹
0− log 𝐹
∗)
(14) ここで𝐹∗は,V 等級 0 の星の明るさである.𝑚
Ⅰ= −2.5 (log 𝐹
Ⅰ− log 𝐹
∗)
であるから,極小時の等級の増加量△mⅠは,△ 𝑚
Ⅰ= 𝑚
Ⅰ− 𝑚
0= −2.5 (log 𝐹
Ⅰ− log 𝐹
0)
= −2.5 log (
𝐹Ⅰ 𝐹0)
(15) となる. 今,𝑓 =
𝐹Ⅰ 𝐹0(16) とおくと,𝑓は,𝑓 = 10
− △𝑚Ⅰ 2.5 (17) で求まる.44
𝑓 =
π𝑅
1𝐹
1+ 𝐹
2+ 𝐹
3=
𝐹
1[1−(
𝑀2 𝑀1)
2]+(
𝑀2 𝑀1)
4𝐹
1+𝐹
3𝐹
1+(
𝑀2 𝑀1)
4𝐹
1+𝐹
3 (18) が得られる. なお,食でないときの等級を𝑚
0,
𝐹3に対応する等級を𝑚
3(=7.4 等級)とすると,𝑚
0 −𝑚
3= −2.5[log(𝐹
1+ 𝐹
2+ 𝐹
3) − log 𝐹
3]
= −2.5 log𝐹
1+ 𝐹
2+ 𝐹
3 𝐹3 なので,1 + 𝑔
𝑔
= 10
− 𝑚0−𝑚3 2.5 より,𝑔が求まる. ここで,𝑔 =
𝐹
3𝐹
1+ 𝐹
2 とすると, 𝑓 =[1 + ( 𝑀2 𝑀1) 2 ] + (1 + 𝑔) (𝑀2 𝑀1) 4 (1 + 𝑔) + (1 + 𝑔) (𝑀2 𝑀1) 4 が得られ,𝓍= (
𝑀2 𝑀1)
2 (19)45 とおくと,(18)式から,
(1 + 𝑔)(1 − 𝑓)𝑥
2− 𝑥 + (1 + 𝑔)(1 − 𝑓) = 0
(20) が得られ,得られる2 根のうち,0 ≤ 𝑥 ≤ 1の範囲の根として,𝑥
Ⅰ=
2(1−𝑓)1(1 − √1 − 4(1 − 𝑓)
2)
(21) が求まる.これより, 𝑀2 𝑀1= √𝑥
Ⅰ(22) の制限が得られる. ちなみに,食Ⅱの極小における等級の増加量△ 𝑚Ⅱは,△ 𝑚
Ⅱ= −2.5 log
𝐹
Ⅱ𝐹
0= −2.5 log
((1+𝑔)(1+𝑥1+𝑔
)+𝑔𝑥
22 )(23) となるはずである. さて,今考えている連星では,2 つの星が重心の周りを回っている. 図 11 連星と重心の回転の様子46 連星の回転角速度Ωを用いると,
φ = Ω(𝑡 − t
0)
(24) と表すことができる. φは,時間とともに増加するわけだが,2π増えるごとに,同じ位置関係にもどるので, 𝑛 =整数部分(
φ 2π)
とすると, φ =2π𝑛 + ∆φ
(25) とおくことができる. そして,∆φが同じ時は,図上で同じ位置にいることになる.この∆φは,0 ≤ ∆φ ≤ 2πの値を とるが,これを2πで割って,α =
∆φ 2π(26) を定義し,位相と呼ぶ. 範囲は0 ≤ α ≤ 1である. (24)式を2πで割ると, φ 2𝜋=
Ω 2𝜋(𝑡 −
t
0) =
(𝑡−t0) 𝑇 (27) となるが,この星の整数部分と小数部分を分けると, (𝑡−t0) 𝑇= 𝑛 + 𝛼
(28) となり,少数部分が連星周期の位相に対応していることがわかる.47 視線方向上で,星1 の外周に,星 2 の外周が接した時から,食が始まると考えられる.そ の時,星1 から見た観測者の方向と,星の方向との角度を∆φとおき,直角三角形𝑃1, 𝑃2, 𝑃3 を考える. すると,観測者の方向から見て,2 つの星が接する時なので,
𝑎
sin ∆φ
𝐸= 𝑅
1+ 𝑅
2(29) となる. ∆φ < 1だとして,sin ∆φ
𝐸≃ ∆φ
𝐸(30) と,近似すると,(21)式は𝑎
⋅ ∆φ
𝐸= 𝑅
1+ 𝑅
2(31) と,近似される. (26)式より,𝑎
⋅ 2𝜋 ⋅ ∆α = 𝑅
1+ 𝑅
2(32) 図 12 観測者からの食48
𝑎 =
𝑅⨀ 2𝜋∆α (𝑀1+𝑀2) 𝑀⨀(33)
を得る. (6)式を少し変形した,𝑎 = [
𝐺(𝑀
1+ 𝑀
2)
(2𝜋)
2𝑇
2]
1 3= [
𝐺𝑀
⨀(2𝜋)
2𝑇
2
]
1 3(
𝑀
1+𝑀
2𝑀
⨀)
1 3(6)’
と(34)式を連立させると,𝑀
1+𝑀
2𝑀
⨀= [
2𝜋𝐺𝑀
⨀𝑇
2(Δα)
3𝑅
⨀3]
1 2 (34) が求まる. 最終的に, 𝑀1= 1 1 + √𝑥
Ⅰ(𝑀1+ 𝑀2) 𝑀2= √𝑥
Ⅰ 1 + √𝑥
Ⅰ(𝑀1+ 𝑀2) が得られる.49
11.謝辞
本研究あたり,井上先生,小野寺先生,日比野様,院生の津田様には大変お世話になり ました.天文台の使い方,作業方法,天文学に関する知識,ありとあらゆることで優しく ご指導いただき,また遅くまで観測にも立ち会っていただきました.また,個人的な事情 で研究ができず,大変ご迷惑をおかけしましたが,優しく手を差し伸べていただき,ここ までやり遂げられたのは皆さんの助力です.本当にありがとうございました.50 https://ja.wikipedia.org/wiki/%E9%A3%9F%E5%A4%89%E5%85%89%E6%98%9F AAVSO(アメリカ変光星協会) https://www.aavso.org/ GCVS(変光星総合カタログ) http://sai.msu.su/gcvs/gcvs/ 国立天文台 ユリウス日 http://eco.mtk.nao.ac.jp/cgi-bin/koyomi/cande/date2jd.cgi AstroArts 基礎知識・天体の種類-9.変光星 http://www.astroarts.co.jp/alacarte/kiso/kiso12-j.shtml
Aladin Sky Atlas
http://aladin.u-strasbg.fr/
誠文堂新光社 日本変光星研究会 『天体観測の教科書変光星観測〔編〕』 誠文堂新光社 福島英雄 著 『天文アマチュアのための 冷却 CCD 入門』