回転子スロット高調波を利用した
誘導電動機の推定速度の応答遅れを考慮した 速度センサレス制御系の構築に関する研究
平成
25年度
三重大学大学院工学研究科 博士前期課程 電気電子工学専攻 電気システム工学講座
渡邊 涼
目次
i
目次
第1章 序論 ... 1
1.1 本研究の背景 ... 1
1.1.1 電動機の高速化とセンサレス要求 ... 1
1.1.2 本研究で注目するセンサレス制御法 ... 2
1.2 本研究の目的 ... 3
1.3 本論文の構成 ... 3
第2章 スロット高調波 ... 4
2.1 スロット高調波の発生メカニズム ... 4
2.2 スロット高調波の理論式 ... 6
2.2.1 透磁率のギャップによる磁束密度の変調 ... 6
2.2.2 中性点電圧に発生するスロット高調波 ... 7
2.2.3 線電流に含まれるスロット高調波 ... 8
2.3 スロット高調波の数式モデル ... 10
第3章 誘導電動機の制御法 ... 12
3.1誘導電動機のベクトル制御 ... 12
3.1.1 三相交流で示したIMの数式モデル ... 12
3.1.2 固定座標系(- 軸)で表した数式モデル ... 15
3.1.3 回転直行座標(d-q軸)で表した数式モデル ... 18
3.2 すべり周波数型ベクトル制御 ... 20
3.3 誘導電動機の非干渉制御 ... 22
第4章 スロット高調波を利用した誘導電動機の速度センサレス制御系の提案 ... 25
4.1 速度センサレス制御システム ... 25
4.2 検出系の遅れ補償 ... 26
4.2.1 スロット高調波電圧の検出系 ... 26
4.2.2 検出系の数式モデル ... 28
4.2.3 検出電圧に遅れを含む場合の誘導電動機の回転速度推定法 ... 30
目次
ii
4.3 スミス補償 ... 32
第5章 シミュレーションによる動作確認 ... 35
5.1 誘導電動機のパラメータ ... 35
5.2 シミュレーションブロック図 ... 36
5.3 提案手法の動作確認 ... 37
5.3.1 定常状態での比較 ... 37
5.3.2 過渡状態での比較 ... 39
第6章 結論 ... 42
6.1 まとめ... 42
6.2 今後の課題 ... 43
参考文献 ... 44
口頭発表 ... 47
謝辞 ... 48
第1章 序論
1
第 1 章 序論
1.1
本研究の背景
1.1.1 電動機の高速化とセンサレス要求
近年,交流電動機(以下,電動機)は産業用機械や輸送機器そして家電用機械など様々 な分野で利用されている。それに伴い,電動機は様々な分野において動力源として適応 範囲の拡大が望まれている。その一環として,パワーエレクトロニクス技術の発展や磁 性体材料の開発は,電動機を数十万rpmという高速領域での駆動を可能にしている[1][2]。 一般的に,高速駆動された電動機は,軸出力を大きくできる。そのため,電動機の小型・
軽量化そして高効率化が可能となる。そのため今後の応用として,限られたスペースで の大出力が要求されるハイブリッド自動車や電気自動車などへの応用が期待される。
近年,電動機として永久磁石同期電動機(以下,PMSM : Permanent Magnet Synchronous
Motors)が広く研究されている。PMSMは高効率であるため様々な動力源として普及し
ている[3]。しかし,高速駆動領域では,PMSMは回転子に永久磁石が埋め込まれている ため遠心力による堅牢性や弱め界磁制御による効率の低下そして永久磁石の減磁現象 の恐れがある。さらに,PMSMは永久磁石に利用されるレアアースの問題など様々な問 題を有している。
そのため,本研究では回転子に永久磁石を利用しない誘導電動機(以下,IM : Induction
Motors)に注目する。IM は高速駆動領域においても堅牢性が高かく,永久磁石を用い
ないため減磁現象の恐れはなく回転子に収められる二次導体の材料の問題を考慮する 必要がない。これらの特長により,本研究では高速駆動の対象としてIMを採用する。
IM を速度制御する際,IM の回転子回転速度の情報が必要となる。一般的に,IMの 速度情報は,速度センサにより取得される。しかし,速度センサは,速度センサの耐久 性,コストの増加そして速度センサのスペースによるIMの小型化への影響などの問題 を有している。そのため,IMは速度センサレス制御化を望まれている。
IM の速度センサレス制御は,電源角周波数制御を基本とし,簡易な構成で実現でき る位相追従型センサレス制御[4][5]と直行二軸座標系上での電流制御を基本とし,瞬時ト ルク制御が可能なセンサレスベクトル制御[6][7]に大別できる。後者は,速度センサレス
第1章 序論
2 化にあたり,適応二次磁束オブザーバのような電動機の数式モデルを利用した手法であ る。しかし,IM を高速駆動させる際は,スイッチング周波数の制限などにより正弦波 PWM駆動ではなく矩形波駆動を採用している。そのため,正弦波PWM駆動を前提と しているこれらの手法では所望の性能を得ることができない可能性がある。さらに,両 方式とも速度推定する際は電動機のパラメータを利用する。そのため,電動機のパラメ ータが熱などにより変動にたいしてロバスト性の確保が問題になる。これらのような問 題に対し,IM の駆動方式やパラメータ変動の影響を受けない速度センサレス制御系の 構築が望まれる。
1.1.2 本研究で注目するセンサレス制御法
前節で説明した問題に対し,本研究は回転子スロット高調波(以下,スロット高調波)
を利用した誘導電動機の速度センサレス制御[8]~[15]に注目する。スロット高調波はIMの 機械的構造に起因して生じる高調波成分であるため,IM の駆動方式や電動機のパラメ ータ変動に影響することなく速度を推定することができるという特長がある。
本手法での速度推定方法は,アナログ信号処理に基づきアナログフィルタやコンパレ ータを用いた零クロス検出による速度推定方法[8]~[11]が提案されている。しかし,これら の手法では精度や分解能の点で問題があった。これらの問題を解決する手法として,デ ィジタル信号処理に基づき,高速フーリエ変換(以下,FFT)を用いた手法[12]が提案さ れている。また,数万rpmの高速領域で駆動されるIMのFFTを利用した速度推定法[13]
も提案されている。文献[13]により提案された手法は,FFT解析結果に検出帯域を設け ることで,IMの回転子に生じる磁束飽和による3f成分による高調波や,矩形波駆動に 伴う電流高調波による高調波成分の影響を除去するにより,良好な精度で速度を推定し ている。さらに,近年では,低速時の速度制御向上のため,高調波電圧励磁を行い発生 したスロット高調波をパルス化してカウントする手法[14]や d 軸電流に含まれるスロッ ト高調波を回転座標上で検出し,適応バンドパスフィルタを用いて回転速度を推定する 手法[15]が提案されている。
以上のように,スロット高調波を利用した速度推定法は数多く提案されている。しか し,速度制御系の構築にまで至る手法は提案されていない。そこで,スロット高調波を 利用した速度センサレス制御系の設計にあたりシミュレーション上で,スロット高調波 が過渡状態および定常状態において精度よく表現することのできる数式モデルを必要 とする。この問題に対し,回転子スロットの影響によって発生する二次起磁力高調波お よび磁気的エアギャップの変化を考慮し,スロット高調波を考慮した誘導電動機の三相 電圧方程式が提案[16]されている。
第1章 序論
3
1.2
本研究の目的
本研究では,スロット高調波を利用したIMの速度センサレス制御系をシミュレーシ ョン上で構築することである。
ここで,提案するセンサレス制御系は,実験環境の問題から高速領域のIMではなく 低速領域でのセンサレス制御系である。さらに,本手法で利用する検出系は分解能と応 答速度の間にトレードオフの関係を有する[13]。しかし,本論文では,検出系の分解能に 関しては考慮せず,応答遅れに焦点を当て応答遅れのある場合でも安定な速度制御系を 構築する方法を提案する。また,構築した速度センサレス制御系と応答遅れを考慮しな い制御系との比較を行い提案する制御系の有効性を検証する。
1.3
本論文の構成
本論文の第2章では,スロット高調波の発生メカニズムや提案されている数式モデル についての説明を行う。
第3章では,IMを制御するための制御法についての説明を行う。
第4章では,スロット高調波を利用した速度センサレス制御系を提案し,本手法で用 いる検出系の問題点について説明する。そして,検出系の問題点を改善する制御器を提 案する。
第5章では,第4章で提案したセンサレス制御系の有効性を検証するため,シミュレ ーションを行う。
最後に,第6章では,本研究の成果をまとめる。
第2章 スロット高調波
4
第 2 章 スロット高調波
本章では,スロット高調波の発生メカニズムとスロット高調波の数式モデルについて 説明する。2.1節では,IMの構造によって生じるスロット高調波の発生メカニズムにつ いて説明する。2.2節では,IMに発生するスロット高調波について説明する。そして,
2.3 節では,文献[16]により提案されているスロット高調波の数式モデルについて説明 する。
2.1
スロット高調波の発生メカニズム
Fig2.1はIMの回転子構造である。鉄心材料はケイ素鋼板である。回転子鉄心はこの
ケイ素鋼板を積み重ねることで積層鉄心としている。積層鉄心には,スロットが刻まれ,
このスロットの中に二次導体を収める。最後に,IM は回転子の両端を短絡環という銅 環で短絡し固定される構造となる。このような構造により,IM は構造的に堅牢で高速 回転化に有利である。
Fig2.2はIMの断面図である。前節で説明したように,積層鉄心の材料はケイ素鋼板
である。そして,スロットに収められる二次導体の材料は,回転子鉄心部分より透磁率 の低いアルミを利用している。そのため,回転子鉄心部分と二次導体の収められたスロ ット部分では,透磁率が異なる。この透磁率のギャップにより,励磁電流により発生す る磁束が回転子を通過する際,磁束が変調を受ける。この時発生する高調波成分が,ス ロット高調波である。
Fig2.3はエアギャップ中における磁束密度分布の模式図である。Fig2.3より,スロッ
ト高調波は,磁束密度の基本波成分にスロットの数だけ高調波が重畳するように発生す る。
第2章 スロット高調波
5
Fig 2.1 IMの回転子構造
Fig 2.2 IMの断面図
Fig 2.3 エアギャップ中の磁束密度分布 二次導体
積層鉄心 回転子
w Rotor Slot
10
Rotor
Stator
w’
u
v u’
v’
Fundamental component Fundamental component
+
Slot harmonics component
Magnetic flux density
1
第2章 スロット高調波
6
2.2
スロット高調波の理論式
2.2.1 透磁率のギャップによる磁束密度の変調
Fig. 2.3 に示すように,磁束密度の基本波成分がスロット高調波成分によって振幅変
調を受けるため,スロット高調波を考慮したエアギャップ中の磁束密度分布B(t,1)は 次式で示される[10]。
} ) (
) cos{(
} ) (
) cos{(
) cos(
) cos(
)}
( cos {
) , (
0 1
0 1 1
0
1 1
0 1
2 1
2 1 1
r re
H r
r re
H r re r H
N t B N
k
N t B N
t k B
t t
N k
B t
B
··· (2.1)
ここで,式(2.1)のは電源角周波数,reは回転角周波数,1は固定子u相巻線が作 る磁束方向を基準とした固定子上の角度,B0は基本波磁束密度の大きさ,Nrは1極対 あたりの回転子スロット数そしてkH は磁束密度の回転子スロット係数(スロット高調 波の基本波に対する割合)である。
(2.1)式において,第1項は,磁束密度の基本波成分を表し,第2項および第3項は,
磁束密度のスロット高調波成分を表す。(2.1)式に示すように,スロット高調波成分はIM の速度情報である回転角周波数reを含むため,スロット高調波を検出することで IM の回転速度を検出できることがわかる。
また,回転子スロット数Nrによって決まるが,(2.1)式の第 2 項及び第3 項において一 方が中性点電圧に現れるスロット高調波の零相成分であり,他方が線電流に現れるスロ ット高調波の三相対称成分(電圧型インバータを用いた場合)を示している。具体的に は,Nr 3N 1(N0,1,2)のとき,第2項がスロット高調波の零相成分,第3項がス ロット高調波の三相対称成分となり,Nr 3N 1(N1,2,3)のとき,第3項がスロッ ト高調波の零相成分,第2項がスロット高調波の三相対称成分となる。なお,一般的に IM の回転子スロット数を選定する場合,振動や騒音を軽減するために,回転子スロッ ト数Nrを3の倍数でない整数となるように設計をすることが多い(8)ため,この場合は考 えないこととする。以後,インバータにおいては,特に断りが無い限り,電圧型インバ ータを用いた場合を考える。次項及び次々項では,中性点電圧に現れるスロット高調波 と線電流に現れるスロット高調波の理論式について記述する。
第2章 スロット高調波
7
2.2.2 中性点電圧に発生するスロット高調波
本項では,IM の固定子中性点電圧に発生するスロット高調波(スロット高調波の零 相成分)の理論式を導出する。ここで,(2.1)式に示す,磁束密度よりIMの中性点電圧 を導出する。ここで,中性点電圧は,IMの三相平衡を前提とすると固定子u相,v相,
w相の誘起電圧の和より導出できる。なお,固定子u相,v相,w相の磁束密度をそれ ぞれBu,Bv,BwとするとIMの中性点電圧vnは次式で示される。
) (
) sin(
) (
) (
1 3 2
3 1
0
N N
t N
B N Kk
t K B t K B t K B v
r re r re
H r
w v
n u
··· (2.2)
ここで,式(2.2)のKはIMの固定子歯の寸法,透磁率,コイルの巻き方で決まる比例定 数である。また,Bu B(t,0),Bu B(t,2 3),Bu B(t,2 4)である。
前項で示したように,IM の回転子スロット数は振動や騒音を低減するため,3 の倍 数ではない整数となるように設計される。したがって,(2.2)式は一般的な式と考えて差 し支えない。また,(2.2)式より,中性点電圧vnは,基本波成分などの相電圧を含まずス ロット高調波成分のみを含んでいることが確認できる。したがって,IM の中性点電圧 を測定することで相電圧を除去でき高い S/N 比でスロット高調波電圧が検出可能であ る。そして,(2.2)式より,中性点電圧に発生するスロット高調波電圧の周波数 fshは次 式で示される。
) (
) (
1 3 1
N N
f f N f f N f
r
se r r r
r
sh
··· (2.3) ここで,式(2.3)のf は電源周波数,frは回転周波数そしてfseはすべり周波数である。
第2章 スロット高調波
8
2.2.3 線電流に含まれるスロット高調波
本項では,線電流に含まれるスロット高調波(スロット高調波の三相対称成分)の理 論式を導出する。ここでは,1例として固定子u相電圧に現れるスロット高調波成分に 注目する。まず,(2.1)式より,IMの固定子uv線間誘起電圧euvと固定子uw線間誘起電 圧euwは次式で示される。
) (
] )}
( ) cos{(
) (
cos )
sin(
[
) (
1 3 1 3 2
3 0 3 0
N N N t N
N
B N t k
B K
t K B t K B e
r r re
r re
r
H r u
uv u
··· (2.4)
) (
] )}
( ) cos{(
) (
cos )
sin(
[
) (
1 3 1 3 2
3 0 3 0
N N N t N
N
B N t k
B K
t K B t K B e
r r re
r re
r
H r w
uw u
··· (2.5)
したがって,(2.4),(2.5)式より,固定子u相誘起電圧euは次式で示される。
) (
} ) sin(
) (
sin {
) (
1 3 2
3 1
0 0
N N
t N
B N t k B
K e e e
r re r re
H r uw
uv u
··· (2.6)
前項で示したように,IM の回転子スロット数は振動や騒音を低減するため,3 の倍 数ではない整数となるように設計される。したがって,(2.6)式は一般的な式と考えて差 し支えない。(2.6)式の第1項は,誘起電圧の基本波成分を表し,第2項はスロット高調 波成分を表す。固定子v相誘起電圧evおよび固定子w相誘起電圧ewも同様に導出でき,
(2.6)式とそれぞれ位相が2/3,4/3遅れた形となる。
電圧形インバータを用いた場合,線間電圧はインバータ出力電圧に固定されるが,IM
第2章 スロット高調波
9 内部でスロット高調波を含んだ誘起電圧が発生するため,スロット高調波成分は各相の 線電流に現れる。この線電流に含まれるスロット高調波成分の周波数は次式で示される。
) (
) (
1 3 1
N N
f f N f f N f
r
se re r
re r
sh ··· (2.7)
本節で説明したスロット高調波の理論式は,文献[10]で提案されているスロット高調 波モデルである。
しかし,説明したスロット高調波の理論式は,磁束密度の変調を定常的に表現した簡 易なモデルである。そのため,IM の速度や負荷のような動作点の変化時に対し過渡応 答を考慮して表現されたモデル式ではない。そこで,次節では,IM の構造から磁束密 度の変調を考慮し,振幅に対して過渡応答も含めたスロット高調波の数式モデルの導出 について説明する。
第2章 スロット高調波
10
2.3
スロット高調波の数式モデル
スロット高調波の数式モデルは,文献[16]によって提案されている。本節では,提案 された数式モデルを簡単に説明する。
提案された数式モデルはFig2.4のような手順によって導出されている。さらに,提案 される数式モデルの前提条件は,
(1). 固定子スロットに基づく空間高調波の影響を無視する。
(2). (1)より,一次起磁力および回転子電流は基本波成分のみ考慮する。
(3). 鉄心の透磁率を無限大とし,エアギャップ中の磁束は,すべて鉄心に鎖交する。
以上の,導出手順および前提条件のもと,スロット高調波の数式モデルは,式(2.8)によ り表される。
Fig 2.4 スロット高調波の数式モデル導出手順
r
s F
F F
・固定子電流is:三相平衡電流
・回転子電流ir:正弦波分布 電流分布iの導出
固定子および回転子電流が作る起磁力分布Fの導出
・一次起磁力Fs:基本波成分のみ考慮し導出
・二次起磁力Fr:起磁力高調波成分を考慮し導出
固定子および回転子巻線磁束鎖交数Fの導出
Bds F
固定子/回転子巻線構造より導出
三相電圧方程式の導出 F P i pl R
v( )
R:巻線抵抗,l :漏れインダクタンス,P :微分演算子
エアギャップ中の磁束密度分布Bの導出
・磁気的ギャップ長g:回転子スロットを考慮し導出
・m:エアギャップ中の透磁率 g F Bm /
第2章 スロット高調波
11 条件(i) Nr=3N+1 (N=0,1,2…)
sin ]
cos
sin cos
3 [ 2
_ 0
t i N
Y t i N
Y
t i N
Y t i N
Y P t
v
qr re r sr dr
re r sr
qs re r ss ds
re r ss
sh s
条件(ii) Nr=3N-1 (N=1,2,3…)
sin ]
cos
sin cos
3 [ 2
_ 0
t i N
Z t i N
Z
t i N
Z t i N
Z P t
v
qr re r sr dr
re r sr
qs re r ss ds
re r ss
sh s
··· (2.8) ここで,Nrはスロット数,Yss,Ysr,ZssそしてZsrはスロット高調波係数,reは回転子 角周波数,は一次角周波数である。また,本研究で用いる実機は,スロット数が23で あるのでシミュレーションで利用する数式モデルは条件(i)の式を利用する。文献(16)で は,スロット高調波係数は実機実験により実験値を求められている。得られたスロット 高調波係数は,Table2.1のように求められる。
Table 2.1 スロット高調波係数
スロット高調波係数 同定条件
Yss 8.42×10-5 iqs = 0 A,600 rpm
Ysr 1.40×10-4 ids = 1 A,600 rpm
以上より,本論文では式(2.8)およびTable2.1で示されるスロット高調波のモデル式お よびスロット高調波係数を利用してスロット高調波を利用した速度センサレス制御系 をシミュレーション上に構築する。
第3章 誘導電動機の制御法
12
第 3 章 誘導電動機の制御法
本章では,本研究で IM を速度制御するための制御手法について説明する。3.1 節で は,IMの数式モデルを簡易に制御を可能にするための座標変換について説明する。3.2 節では,IMのトルクをq軸電流およびd軸回転子磁束鎖交数のみで制御可能にするす べり周波数形ベクトル制御について説明する。
3.1
誘導電動機のベクトル制御
3.1.1 三相交流で示したIMの数式モデル
Fig3.1はIMの三相等価回路である。さらに,式(3.1)はFig3.1の三相等価回路により
求めたIMの三相電圧方程式である。ここで,式(3.1)のそれぞれの文字は,RsおよびRr
は固定子および回転子巻線抵抗,Ls’および Lr’は固定子および回転子自己インダクタン
スそしてM’は相互インダクタンスである。また,reは固定子u相巻線を基準として時
計回りにとった回転子u相の角度である。IM において,回転子側はu,vそしてw相 の区別をすることはできないが,位相関係の説明のために便宜上仮定したものである。
また,固定子および回転子巻線には,それぞれ漏れインダクタンスが存在し,式(3.2) のように示される。
' '
' '
M l L
M l L
r r
s s
··· (3.2)
ここで,IMの回転子角周波数をreとすると,回転子格周波数は式(3.3)のように表さ れる。
redt
re
··· (3.3)
第3章 誘導電動機の制御法
13
wr vr ur ws vs us
r r r
r r
r
re re
re
re re
re
re re
re
re re
re
re re
re
re re
re
s s s
s s
s
ws vs us
i i i i i i
dt R dL dt
dM dt
dM
dt dM dt
R dL dt
dM
dt dM dt
dM dt
R dL
dt M M d
dt M d
dt d
dt M M d
dt M d
dt d
dt M M d
dt M d
dt d
dt M M d
dt M d
dt d
dt M M d
dt M d
dt d
dt M M d
dt M d
dt d
dt R dL dt
dM dt
dM
dt dM dt
R dL dt
dM
dt dM dt
dM dt
R dL
v v v
' '
2 1 '
2 1
' 2 1 '
' 2 1
' 2 1 '
2 1 '
cos 3 '
cos 2 3 '
cos 2 '
3 cos 2
' cos
3 ' cos 2
'
3 cos 2
3 ' cos 2
' cos
'
cos 3 '
cos 2 3 '
cos 2 '
3 cos 2
' cos
3 ' cos 2
'
3 cos 2
3 ' cos 2
' cos
'
' '
2 1 '
2 1
' 2 1 '
' 2 1
' 2 1 '
2 ' 1
0 0 0
··· (3.1)
式(3.1)より,IM の電圧方程式は固定子および回転子についての方程式である。その ため,式(3.1)のままでは,IMの制御が複雑になってしまう。以下では,IMの制御を容 易にするために,IMの電圧方程式を変換する方法について説明する。
第3章 誘導電動機の制御法
14
Fig 3.1 IMの三相等価回路
vus
vvs vws
Rs
Rr
re
M'cosre
L's
L'r
回転子の基準位置
(回転子u相巻線)
第3章 誘導電動機の制御法
15
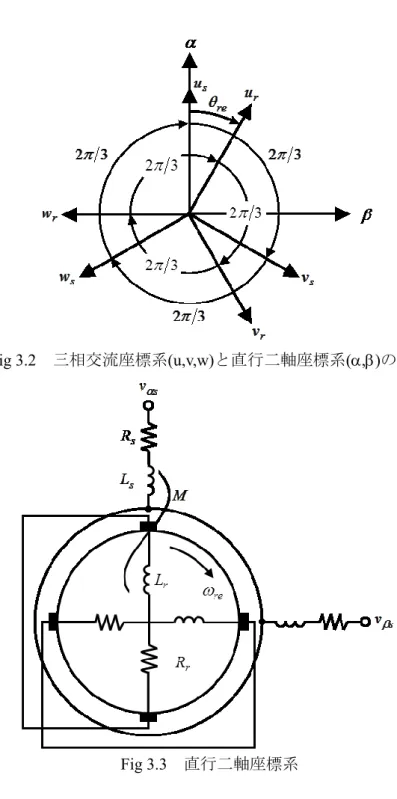
3.1.2 固定座標系(- 軸)で表した数式モデル
Fig3.2はIMの三相交流座標系と直行二軸座標系の関係を表した図である。Fig3.2の
位相関係から,Fig3.3のような直行二軸座標系に変換するには,式(3.4)のような変換式 を利用する。
c v c z c 1 c i ··· (3.4)ここで,式(3.4)の[v]は電圧ベクトル,[z]はインピーダンスベクトル,[i]は電流ベクト ルそして[c]は変換行列である。また,[c]-1は[c]の逆行列であり式(3.5)のような関係があ る。
c c 1 I ··· (3.6)ここで,式(3.6)のIは単位行列である。また,式(3.4)の[c]は三相座標から直行二軸座標 系への変換行列である。
3 sin 2
3 sin 2
sin 0
0 0
3 cos 2
3 cos 2
cos 0
0 0
0 0
2 0 3 2
0 3
0 0
2 0 1 2 1 1
3 2
re re
re
re re
re
c
··· (3.7) 以上の変換にしたがい三相交流から二相交流へ変換したIMの電圧方程式は,式(3.8) のように表される。