法政大学大学院理工学・工学研究科紀要 Vol.56(2015年3月) 法政大学
鉗子の配置を考慮した単孔式腹腔鏡手術用 ロボットの開発及び位置追従制御
DEVELOPMENT OF A SURGICAL ROBOT FOR SINGLE-PORT SURGERY AND ITS POSITION TRACKING CONTROL
山岡大祐 Daisuke Yamaoka 指導教員 石井千春 教授
法政大学大学院理工学研究科機械工学専攻修士課程
This paper discusses the development of a novel surgical robot for single-port surgery (SPS) and proposes use of the robot’s position control method, which is based on inverse kinematics. The developed surgical robot consists of two forceps manipulators and two robotic arms and can achieve a forceps placement called
“rotation formation” that makes it possible to enlarge a surgical-instrument work space from that used with conventional forceps formation. For the pitch motion control, a gravity compensation was proposed to cancel the influence of the gravity, and effectiveness of the proposed gravity compensation was demonstrated through the experiment. The position control method was derived using the Jacobian matrix and Newton’s method. To evaluate the accuracy of the developed surgical robot and the tracking performance of its position control method, position control experiments were conducted; the experimental results are presented here.
Key Words: Surgical robot, Single-Port surgery (SPS), Rotation formation, Position control
1. 緒論
内視鏡下で行われる低侵襲手術では,限定された空 間・視野内での繊細な手術操作が要求される.そのため,
手術を行う医師には高度な技術が必要とされている.近 年,腹腔鏡手術分野では,単孔式腹腔鏡手術 (Single-Port
Surgery: SPS) による手術例が増加している[1].SPSは,
臍上に切開する一箇所の孔から複数の手術器具を挿入し て行う手術方法である.従来の多孔式腹腔鏡手術におい ては,術者の操作によりロボットが手術を行うマスタス レイブ型の手術支援用ロボットが種々開発され,臨床に 使用されている[2].SPS においても,一つの円筒内に腹 腔鏡カメラと2本の作業用マニピュレータを収めた,SPS 用手術支援用ロボットの開発が進められている[3],[4],[5].
しかしながら,これらの手術支援用ロボットは作業領域 が狭く,微細作業しか行うことができないと考えられる.
SPS においては,手術器具同士の干渉のために,作業 空間が限定されてしまうことが大きな問題となっている.
SPS での手術器具の配置には代表的なものとして,鉗子 同士を水平に交差させる”クロス配置”,及び螺旋状にね じった状態で挿入される”ローテーション配置”の2つが ある.文献[6]においては,ローテーション配置の方がよ り広い作業空間を確保可能であることが示されている.
そこで本研究では,SPS での手術例の多い胆嚢摘出手 術を想定し,手術器具のローテーション配置を実現でき るSPS用手術支援用ロボットを開発した.開発した手術 支援用ロボットは,鉗子マニピュレータとロボットアー ムの 2 つの要素から構成される.著者の知る限りでは,
これまでに手術器具のローテーション配置を意識した SPS用手術支援用ロボットは開発されていない.
また,動作時に重力の影響を受ける縦方向の旋回動作 に対し,重力項をキャンセルして操作が行えるよう重力 補償を行い,有効性を検証した.
さらに,開発した手術支援用ロボットの運動学解析を 行い,逆運動学に基づく位置制御則を構築した.まず同 時変換行列を用いて手術ロボットの順運動学を求め,導 出した順運動学よりヤコビ行列を求めた.次に逆運動学 問題の数値解を,ヤコビ行列とニュートン法を用いて導 出した.最後に,PI 制御により手術ロボットの先端が目 標位置に追従する位置制御系を構築し,追従性能を評価 するために,円軌道目標及びマスタデバイス入力による 位置制御実験を行った.
2. 単孔式腹腔鏡手術(SPS)
(1)SPSの利点
従来の腹腔鏡手術では,腹部の表面に複数の孔を開け,
それぞれの孔から手術器具を挿入して手術を行う.しか しSPSでは,臍上に切開する一箇所の孔から複数の手術 器具を挿入して手術を行う.SPS は従来の方法よりも傷 口が少なくなることから,術後の癒着による合併症が少 なくなると考えられている.また,切開跡は臍部に引き こまれて見えなくなるため,整容性が良い[7].
(2)SPSにおける鉗子配置
SPS では,鉗子や腹腔鏡といった手術器具を単一孔か ら挿入する.このため,通常の多孔式腹腔鏡手術に比べ て,手術器具の操作が窮屈な手術となる.手術器具の配 置にはパラレル,クロス,ローテーションの 3つの方法 があるが,各器具を並行して挿入するパラレル配置では,
器具が隣接しているため,十分な動作領域が得られない
[8].よって2本の鉗子を,挿入孔を中心に横方向に交差
した状態で配置するクロス配置,または手術器具を螺旋 状にねじった状態で配置するローテーション配置が広く 用いられている.最近では,ローテーション配置の方が,
クロス配置よりも広い動作領域が確保できることが実証 されており[6],臨床においても推奨されている.図1に SPSにおける手術器具のローテーション配置を示す.
Fig.1 Rotation formation of forceps and laparoscope 3. 手術支援用ロボットの設計
(1)設計仕様
手術支援用ロボットは,医師が操作する鉗子の代わり となる鉗子マニピュレータと,その保持及び移動を行う ロボットアームによって構成され,腹腔鏡は手術の際に 助手が手動で操作することを想定している.開発を行っ た手術支援用ロボットの設計仕様を以下に挙げる.
a)鉗子配置
切開孔の拡大を防ぐため,体表面に開ける挿入孔に動 作固定点(Remote Center of Motion:RCM)をもつ[7].また,
手術器具のローテーション配置が可能であり,互いのロ
ボットアームが接触することなく,動作が行えるように する[8].
b)ロボットアーム
ロボットアームは,鉗子マニピュレータの水平方向,
上下方向,奥行き方向移動の 3自由度の動作が行えるよ うにする.また各方向の動作範囲は,SPS において手術 例が多い,胆嚢摘出手術を行うために必要と考えられる 動作領域を確保する.
c)鉗子マニピュレータ
鉗子マニピュレータは市販のSPS用の鉗子と同様の動 作が行えるように,鉗子先端の回転,把持開閉,及び上 下左右方向への屈曲が行えるようにする.
(2)ロボットアームの設計
ロボットアームの各動作範囲は実際の胆嚢摘出術を参 考に設定した.胆嚢の位置は3D人体モデルを利用するこ とで推定し,また各方向の動作範囲は,胆嚢摘出手術の 動画映像を参考にした.図 2 にロボットアームの動作範 囲を示す.
Fig.2 Yaw and pitch working range
ここで,水平面内での旋回をヨー動作,上下方向の旋 回をピッチ動作,侵襲方向への直進運動をトランスレー ション動作とする.胆嚢と臍部をつなぐ直線から左右 5°
ずつ離れた位置に鉗子マニピュレータを設置し,ヨー角 の可動領域は設置位置から把持鉗子側は40°,剥離鉗子側
は10°とした,ピッチ角の動作領域は水平面0°から45°ま
で,トランスレーションの動作領域は前後98.4mmとした.
把持鉗子側の動作領域については,施術部を露出させる ために腹腔鏡視野外で臓器把持を行うなど,比較的大き な動作を行う必要があるため,剥離鉗子側よりも広い動 作領域を設定した.
図3 にピッチ動作の機構概要を示す.ピッチ動作及び ヨー動作は曲線ガイドレール上を動作する機構となって おり,レールに並行した曲面上に歯付きベルトを固定し,
駆動部側の歯付きプーリを回転させることにより動作を 行う.
Fig.3 Drive mechanism of pitch motion
トランスレーション動作には,ボールねじにより回転 運動を直線運動に変換する直動アクチュエータを用いた.
図4にトランスレーション動作の機構概要を示す.
Fig. 4 Drive mechanism of the translational motion
(3)鉗子マニピュレータの設計
鉗子マニピュレータは,鉗子先端の把持開閉と軸先の 回転,鉗子先端の上下左右方向への屈曲をモータ制御に より遠隔操作可能な機構とした.鉗子の先端部からシャ フト部までは,市販の SPS 用の鉗子(COVIDIEN 社,
SILS™ダイセクト)の一部部品を流用し,操作部分に関 して新規に設計,製作を行った.把持開閉及び軸先の回 転は,DCモータにより駆動させる.図5にマニピュレー タの外観を示す.
Fig. 5 Forceps manipulator for SPS
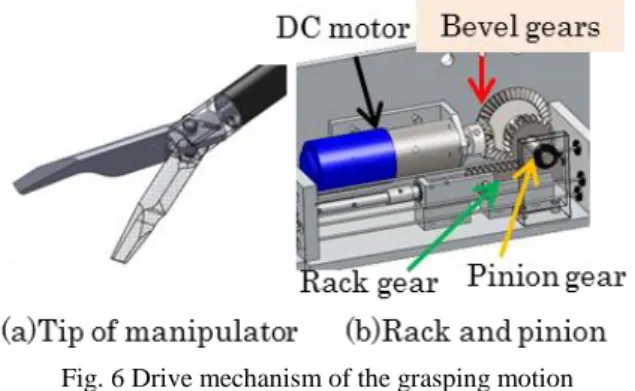
利用したSPS用の鉗子において,鉗子先端の把持開閉 は,鉗子軸の内部にあるワイヤーの押し引きにより行う 仕組みになっている.これより,ラックアンドピニオン 機構を用いてモータの回転運動を直線運動に変換し,ワ イヤーの押し引きを行うことで把持開閉動作を実現する.
また軸先の回転動作は,鉗子シャフト内部の軸を,平歯 車を介してモータで回転させることにより,実現してい る.図6に鉗子先端の把持開閉動作の機構概要を示す.
Fig. 6 Drive mechanism of the grasping motion SPS では通常,挿入孔を境に左右の鉗子が交錯するた め,市販のSPS用の鉗子は腹腔内において鉗子先端が上 下左右に屈曲して操作が行えるようになっている.利用 した鉗子では,把持開閉機構の末端から操作部側まで 4 本のワイヤーが配置されており,対向するワイヤーを押 し引きすることで屈曲動作を実現している.図 7に利用 したSPS用鉗子内部の簡易図を示す.
Fig. 7 Wire assignment for bending in ready-made forceps 屈曲動作をモータ制御で行うために,かさ歯車とプー リによるワイヤー巻取り機構を用いた.対向する 2 つの かさ歯車が互いに逆回転することを利用し,一方のプー リでワイヤーの巻取りを行い,もう一方ではワイヤーを 緩める機構となっている.この機構を2つ用いることで,
上下・左右方向の2自由度の屈曲動作を実現する.
図8に,鉗子先端のモータ駆動による屈曲機構を示す.
Fig. 8 Drive mechanism of the bending motion 上記により設計したロボットアームと鉗子マニピュレ ータ 2 台を製作し,組立てた手術支援用ロボット全体の 外観図を図 9に示す.組み立てた状態でのロボットは幅
約600mm,奥行き約700mm,高さ約400mmであり,総
重量は約18kgである.
Wires for up-down bending Wires for left-right bending
Fig. 9 Overview of the SPS surgical robot 製作した 2 台のロボットアーム及び鉗子マニピュレー タを配置したところ,挿入孔における動作の固定が確認 できた.また,手術器具のローテーション配置が可能で あり,ロボットアームが干渉せずに動作を行えることも 確認できた.加えて,ロボットアーム及び鉗子マニピュ レータの動きを検証したところ,想定した動作が遠隔操 作によって達成できることが確認された.これらより,
設計仕様a)-c)を満たすことを確認した.
(4)マスタデバイス
手術支援用ロボットの遠隔操作にはForce Dimension社 製の入力装置Omega.7をマスタデバイスとして用いる.
Omega.7は平行3軸と回転4軸の自由度を持つ力覚付入
力装置である.図10にOmega.7と各自由度を示す.
Fig. 10 Haptic device Omega.7 and its manipulations 4. 重力補償
(1)数式モデル
ロボットアームのピッチ動作では,鉗子マニピュレー タ及びアーム動作部の自重による重力の影響のため,追 従性能の低下が見られた.ピッチ動作における,目標角 度と対応した動作を行うモータのエンコーダ値の追従実 験結果を,図11に示す.
Fig.11 Tracking capability of pitch motion また図12に,ピッチ動作における手術支援用ロボット の簡易モデルを示す.図12 より,RCMまわりのピッチ 動作の運動方程式は次式で与えられる.
mgl cos
I
(1)ただし,𝐼はRCMまわりの駆動部及び鉗子マニピュレ ータの慣性モーメント,𝜃はピッチ角,𝜏は駆動トルク,𝑚 は駆動部及び鉗子マニピュレータの質量,𝑙はRCMから 重心までの距離である.
ここで,制御トルクを𝜏𝑖𝑛とし,重力成分をキャンセル するために次式の重力補償入力を定義する.
in mgl cos
(2)(1)式を(2)式に代入すると,次式が得られる.
in
I
(3)すなわち,(2)式の重力補償により重力成分をキャンセル することができ,重力の影響を受けずにピッチ動作の追 従制御が行える.
Fig.12 Simplified model of pitch motion
(2)重心位置
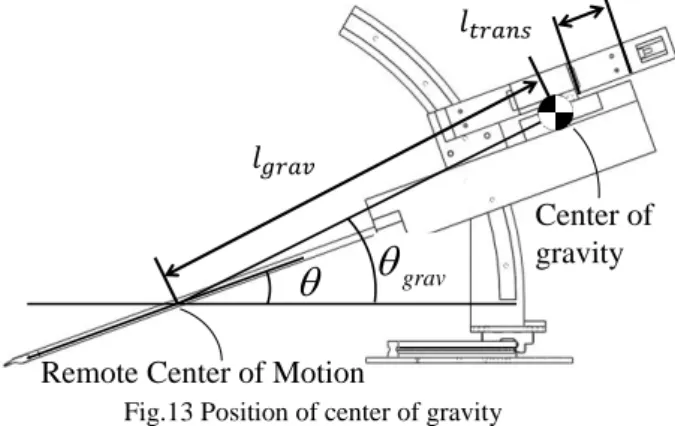
ロボットアームは鉗子マニピュレータのトランスレー ション動作が可能なため,実際には図 12 において駆動部 及び鉗子マニピュレータの重心位置が変化する.図 13 に,
ピッチ動作におけるアーム駆動部と鉗子マニピュレータ の重心位置を示す.ここで,RCMから重心までの直線距 離を重心距離𝑙𝑔𝑟𝑎𝑣,𝑙𝑔𝑟𝑎𝑣が水平線となす角を重心角𝜃𝑔𝑟𝑎𝑣, トランスレーション変位を𝑙𝑡𝑟𝑎𝑛𝑠としている.重心位置は
Remote Center of Motion 𝜃
𝜃 𝑚 𝜃 𝑙
𝑚
トランスレーション動作部の変位によって変化すると考 えられるため,トランスレーション変位𝑙𝑡𝑟𝑎𝑛𝑠が最大と最 小の場合でそれぞれ算出を行う.
Fig.13 Position of center of gravity
た だ し , 算 出 時 のア ー ム ピッ チ 角 は𝜃= 0[deg]と す
る.𝑙𝑡𝑟𝑎𝑛𝑠は,直動アクチュエータ動作部がRCMから最遠
点に位置しているときに0[mm]とし,0≦𝑙𝑡𝑟𝑎𝑛𝑠≦98.4[mm]
の値域を持つ.表 1 に算出結果を示す.
Table 1 Calculation results of center of gravity Translation position 𝑙𝑔𝑟𝑎𝑣 [mm] 𝜃𝑔𝑟𝑎𝑣 [deg]
Max (𝑙𝑡𝑟𝑎𝑛𝑠= 98.4) 371.50 4.76
Min (𝑙𝑡𝑟𝑎𝑛𝑠= 0) 431.76 4.09
表1より, 𝑙𝑡𝑟𝑎𝑛𝑠の変化に従って重心位置が変化してい
る.トランスレーション動作により,重心距離 𝑙𝑔𝑟𝑎𝑣及び 重心角𝜃𝑔𝑟𝑎𝑣が線形に変化すると考え, 𝑙𝑡𝑟𝑎𝑛𝑠の中間点では 線形補間すると,次式により𝑙𝑔𝑟𝑎𝑣と𝜃𝑔𝑟𝑎𝑣を求めることが できる.
] mm 4 [
. 98
26 . 76 60 .
431
transgrav
l
l
(4)[deg]
4 . 98
67 . 09 0 .
4
trans
grav l
(5)
(4),(5)式より,(1)式は実際には,
grav
mgl
gravI cos
(6)となるため,実際の重力補償には次式を用いる.
grav grav
in
mgl
cos
(7)(3)重力補償の検証実験
重力補償の有無による,ロボットアームの追従性能の 相違を,実機を用いて検証する.図14に実験結果を示す.
図14より,鉗子マニピュレータが低角から高角へ上昇
するときに,追従遅れ及び定常偏差を減少させることが できた.逆に,高角から低角へ降下するときには,重力 によるオーバーシュートを抑え,動作の行き過ぎを防ぐ ことができた.また,上昇と下降で同等の追従性が得ら れており,重力の影響をキャンセルすることができたと 言える.トランスレーション変位が最大,最小の場合で も同じ実験を行ったが,重力補償を行うことによって,
同様な結果が得られた.これより,重力補償の有効性を 検証することができた.
Fig.14 Tracking capability of pitch motion with gravity compensation when 𝑙𝑡𝑟𝑎𝑛𝑠= 50 𝑚𝑚 5. 運動学
開発したSPS用手術支援用ロボット対象とし,逆運動 学解析を用いて,Omega.7 の操作方向に鉗子先端の位置 を追従させるマスタスレイブ制御を行う.2節で述べたよ うにSPSにおいては,鉗子の操作部とモニタを通して見 る先端の左右が逆転する.したがって,マスタスレイブ による制御では,手術支援用ロボットと入力装置の左右 を置き換えることで逆転問題を解決する.例えば,左側 に設置されたロボットアーム及び鉗子マニピュレータは,
右手側に配置されたOmega.7によって操作される.
図9及び図15左に示すように,基準座標系(x, y, z)は曲 線ガイドの中心に設定し,また左右のロボットアーム,
鉗子マニピュレータ,及びOmega.7は図15のように配置 される.
Fig. 15 Placement of the surgical robot and Omega.7
(1)順運動学
順運動学の解は同時変換行列を用いて求めることが出 来る.本研究では,図15に示す基準座標系により2台の 手術支援用ロボットの鉗子先端位置を表現する.始めに,
右側のOmega.7と左側の手術支援用ロボットの対応を考
grav Center of gravity
𝑙𝑡𝑟𝑎𝑛𝑠
𝑙𝑔𝑟𝑎𝑣
Remote Center of Motion
[Top view] [Side view]
y z x
𝜃 𝜃
Surgical robots
Standard coordinates
P
Master 𝑙
φ
Surgical robot
𝜃
𝜃
𝑙 Rotation center RCM
える.ここで,左右の手術支援用ロボット,Omega.7 を 区別するために,添字にL(左),R(右)を用いる.
図 11 に示すように,Yaw,Pitch の角度を𝜃1,𝜃2,
Translation の変位を d3,鉗子先端の水平方向と鉛直方向
の屈曲角度を𝜃4,𝜃5とする.基準座標からYaw方向の同 時変換行列をL0TL1,Pitch方向,Translation方向の同時変 換行列をそれぞれLlTL2,L2TL3と表す.また,鉗子の屈曲 における水平面内及び鉛直面内の回転を L3TL4,L4TL5,さ らに屈曲部の回転中心から鉗子先端位置までの並進を
L5TL6と表す.ここで,屈曲部の回転中心から鉗子先端ま での長さを屈曲部長さl4とし,l4の長さは50mmである.
また,基準座標の原点からRCMまでの距離は300mm,
基 準 座 標 の 原 点 か ら 屈 曲 部 の 回 転 中 心 ま で の 距 離 は
330mmである.このとき,各同時変換行列は次式で与え
られる.
1 0
0 0
0 1
0 0
300 300 0
300 0
1 1
1
1 1
1
1
0 L L L
L L
L
L
L S C C
S S
C
T (8)
1 0
0 0
300 0
300 300 0
0 0
0 1
2 2
2
2 2
2 2
1
L L
L
L L
L L
L
S C
S
C S
T C (9)
1 0
0 0
0 1
0 0
330 0 1 0
0 0
0 1
3 3
2 L
L
L d
T (10)
1 0 0 0
0 1 0 0
0 0
0 0
4 4
4 4
4
3 L L
L L
L
L S C
S C
T (11)
1 0 0 0
0 0
0 0
0 0 0 1
5 5
5 5
5 4
L L
L L
L L
C S
S
T C (12)
1 0 0 0
0 1 0 0
0 1 0
0 0 0 1
4 6
5 l
TL
L (13)
ただし,CLi =
i
cos , SLi =sini(i15)として表記 している.基準座標から左側の手術支援用ロボットの鉗 子先端位置までの同時変換行列L0TL6は次式で表される.
6 5 5 4 4 3 3 2 2 1 1 0 6 0
L L L L L L L L L L L L L
LT T T T T T T (14)
(14)式の同時変換行列に,鉗子先端の座標系における原 点ベクトルL6p
0 0 0 1
Tを掛けたものが,基準座標 系から見た左側の手術支援用ロボットの鉗子先端位置となる.したがって,順運動学の解,すなわち,基準座標 系から見た鉗子先端の座標は次式で表せる.
TL L L
L0p 0T6 6p x y z 1 (15) また,基準座標から右側のOmega.7の定常位置への同 時変換行列 R0TRomega は(16)式で与えられる.ここでは
Omega.7 の相対的な操作量が分かればよいので,並進は
含まず回転のみを考慮する.
1 0 0 0
0 1 0 0
0 0
0 0
omega
0 R R
R R
R
R S C
S C
T (16)
ここで,CR =cos,SR =sin
として表記しており,左側の手術支援用ロボットは右側のOmega.7によって遠 隔操作されるため,添え字を𝑅とする.また,𝜑は基準座 標系から見た右側Omega.7 の定常位置の,水平軸からの 傾斜角度である.
Omega.7の操作量をRomegap
x0 y0 z0 1
Tとし,Omega.7の操作に対して,鉗子先端の動きを縮小して追従 させるスケーリングを行うため,スケーリング定数α (0 <
α < 1)を 導 入 す る . 操 作 量 をα倍 し た も の を
Tr
Romegap x0 y0 z0 1 とすると,これは基準座標系
では次式のように表せる.
r r r
Tr R R R r
R p Tomega omegap x y z 1
0
0 (17)
すなわち基準座標系において,(15)式の
x y z
Tを(17)式の
xr yr zr
T に追従させる制御を行う.左側のOmega.7 と右側の手術支援用ロボットの対応は,
基準座標に対して左右対称に求める.
(2)ヤコビ行列
ヤコビ行列は各関節の角速度と,先端の位置の速度の 関係を表す行列である.微小時間における各関節の変化 量と,先端の位置の変化量を考え,手術支援用ロボット の鉗子先端の微小変位をΔ𝒓,関節角度の微小変位をΔ𝜽 とすると,次式が成り立つ.
r J
(18)ここで,𝑱はヤコビ行列と呼ばれる.本研究で対象として いる手術支援用ロボットの場合,𝜃1,𝜃2,d3が変数であり,
𝜃4,𝜃5は一定とする.したがって,𝜃4,𝜃5は微小時間に おいて変化しないため,次式が成り立つ.
3 2 1
d J z y x
(19)
このとき,ヤコビ行列は次式で与えられる.
3 2 1
3 2 1
3 2 1
d z z z
d y y y
d x x x
J
(20)
(19)式から,本研究で対象としている手術支援用ロボッ トのヤコビ行列 𝑱 は正方行列であることがわかる.また 𝜃4,𝜃5は変化しないため,(20)式のヤコビ行列𝑱は𝜃4,𝜃5
による偏微分の成分がない.
(3)逆運動学
順運動学とは逆に,ロボットの先端位置からロボット の各関節角度を求める問題を逆運動学という.一般的に,
逆運動学の解を解析的に求めるのは困難であり,本研究 では以下のアルゴリズムを使用して,ヤコビ行列を用い た数値解を求める.(19)式より,次式が成り立つ.
r
J
1 (21)鉗子先端の現在位置,1ステップ前の位置をそれぞれ 𝒓𝒏𝒆𝒘,𝒓𝒐𝒍𝒅と表し,手術支援用ロボットの更新角度,現在 角度をそれぞれ𝜽𝒏𝒆𝒘,𝜽𝒐𝒍𝒅と表す.このとき,(21)式を用 いると,ニュートン法より,次式が求まる.
r
old
J
old new
1
)
1(
old new oldJ r r
(22)
手術支援用ロボットの現在角度𝜽𝒐𝒍𝒅はモータに取り付 けたエンコーダにより測定でき,鉗子先端の現在位置 𝒓𝒏𝒆𝒘はOmega.7 より検出される.また𝒓𝒐𝒍𝒅は,現在角度𝜽𝒐𝒍𝒅
と(15)式により得る.これより,更新角度𝜽𝒏𝒆𝒘,すなわ ち逆運動学の解が得られる.
6. 位置追従制御の性能評価
(1)位置追従制御
上述したように,ニュートン法を用いた逆運動学の数 値解によって,サンプリング時間ごとに手術支援用ロボ ットが到達すべき更新角度𝜽𝒏𝒆𝒘が得られるので,これを 目標角度として追従制御を行うことにより,鉗子先端の 位置追従制御を達成することができる.コントローラに は,各変数に対して PI コントローラを使用する.図 16 に,位置追従制御系のブロック線図を示す.
Fig. 16 Block diagram of position tracking control
(2)動作実験
求めた逆運動学の解の有効性を検証すると共に,導出 した逆運動学に基づく位置追従制御法の制御性能を評価 するため,手術支援用ロボットの動作実験を行った.
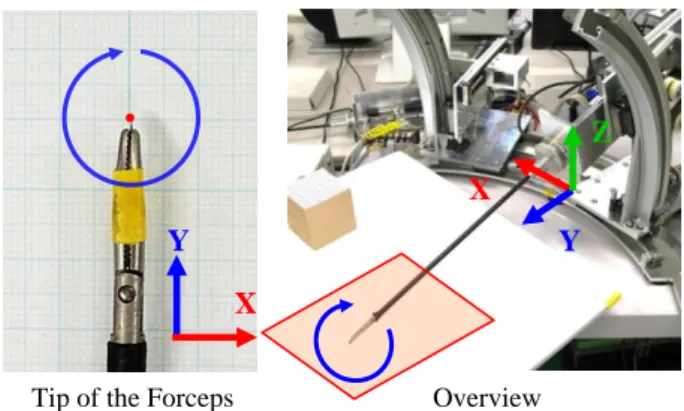
a)第1実験では,直径20mmの円軌道を水平・垂直面内 に設定し,5sで鉗子マニピュレータ先端を追従させた.
先端位置の推移はカメラ撮影により記録した.
b)第2実験はOmega.7を用いて目標位置を入力,Omega.7
の操作に鉗子マニピュレータ先端を追従させた.
図17に,第1実験の様子を示す.
Fig. 17 Appearance of experiment 1
実験では数値計算ソフト MATLAB/Simulink を用い てプログラムを作成した.インタフェースボードには Inteco 社製ディジタルコントローラPCIA04 を用い,モ ータアンプには Metronix 社製バイポーラ電源,及び Quanser 社製VoltPAQ-X4 を用いた.
また,制御器には前述のPIコントローラを用いており,
そのゲインの値を表2に示す.
Table 2 Values of controller gain
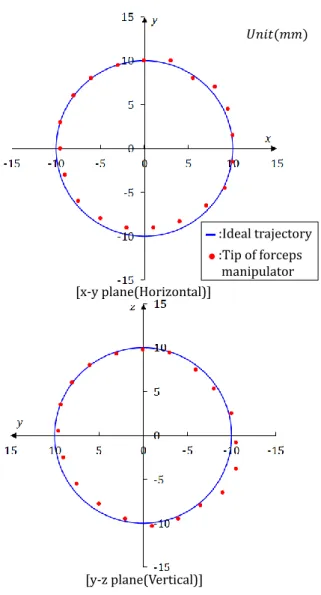
(3)実験結果
第1実験の結果を図18に示す.結果より,概ね目標軌 道に追従していることがわかる.しかし,水平面内で最
大0.9mm,垂直面内で最大1.2mmの追従誤差が生じた.
位置誤差が生じた原因の1つとして,実機の物理パラ メータと解析モデルの物理パラメータの誤差が考えられ る.今後はより高精度に物理パラメータを計測・同定す る必要がある.さらに,制御誤差も考えられる.そのた め,今後は表2 における𝐾𝑝, 𝐾𝑖の各ゲインを調節し,位 置追従性能の向上を図る.
また第2実験に関しても,主観的ではあるが,Omega.7 の操作方向に鉗子先端が追従することが目視により確認 でき,操作者が直観的に手術支援用ロボットを操作する ことができた.
Actual robotic arm PI
Controller Motor Sensor (Encoder) Forward
Kinematics
Inverse Kinematics
𝜽 𝜽𝑛 𝒓𝑛
𝒓
: Operating voltage
: Convesion from motor angle to arm angle 𝒓𝒓𝒆 𝒍: Actual position of the tip of forceps manipulator
𝒓𝒓𝒆 𝒍
Tip of the Forceps Y
X
Y Z X
Overview
Yaw θ1 Pitch θ2 Translation d3
Kp 5 3 1
Ki 0.1 0.1 0.01
Fig. 18 Results of Experiment 1
7. 結言
本研究では,単孔式腹腔鏡手術(SPS)において,手術 器具のローテーション配置が可能なSPS用手術支援用ロ ボットを開発した.製作した鉗子マニピュレータおよび ロボットアームを用いて動作実験を行い,設計仕様を満 たすことを確認した.
またピッチ方向の動作について,数学モデルに基づく 重力補償を行うことにより,追従性能の向上を図った.
開発したSPS 手術支援用ロボットをスレイブデバイス,
力覚提示付デバイスOmega.7 をマスタデバイスとしたマ スタスレイブ制御系において,逆運動学に基づき,直観 的な操作が可能な位置追従制御系を構築した.
さらに,開発した手術支援用ロボットの動作精度,及 び構築した制御系による追従性能を評価するため,円軌
道とOmega.7からの入力を目標値とする位置追従制御実
験を行った.実験結果から,手術支援用ロボット及び位 置追従制御系の有効性を検証した.
参考文献
1) Inderbir S. Gill, et al., “Consensus statement of the consortium for laparoendoscopic single-site surgery”, Surg Endosc, Vol.24, 2010, pp.762-768.
2) Russell H. Taylor and Dan Stoianovici, “Medical Robotics in Computer-Integrated Surgery”, IEEE Transactions on Robotics and Automation, Vol.19, No.5, 2003, pp.765-781.
3) Andrea Bajo, et al., “Integration and Preliminary Evaluation of an Insertable Robotic Effectors Platform for Single Port Access Surgery”, Proceedings of the IEEE International Conference on Robotics and Automation, May 2012, pp.3381-3387.
4) Marco Piccigallo, et al., “Design of a Novel Bimanual Robotic System for Single-Port Laparoscopy”, IEEE/ASME Transactions of Mechatronics, Vol.15, No.6, Dec. 2010, pp.871-878.
5) Yuta Sekiguchi, Yo Kobayashi, et al., “Development of a Tool Manipulator Driven by a Flexible Shaft for Single Port Endoscopic Surgery”, Proceedings of the 3rd IEEE RAS &EMBS Int. Conf. on Biomedical Robotics and Biomechatronics, 2010, pp.120-125.
6) Hideki Kawamura and Chiharu Ishii, “Mechanical Analysis of the Formation of Forceps and Scope for Single-port Laparoscopic Surgery”, Surg Laparosc Endosc Percutan Tech, Vol.22, No.4, 2012, pp.168-175.
7) Jay D. Raman, Jeffrey A. Cadeddul, Pradeep Raol and Abhay Rane,
“Single-incision laparoscopic surgery initial urological experience and comparison with natural-orifice transluminal endoscopic surgery”, BJU International, Vol.101, Issue 12, June 2008, pp.1493-1496.
8) John R. Romanelli, David B. Earle, “Single-port laparoscopic surgery: an overview”, Surg Endosc, Vol.23, 2009, pp.1419-1427.
9) 大岩克耀,石井千春, “単孔式腹腔鏡下手術(SPS)支援用ロボッ トの位置制御”, 日本機械学会 ロボティクス・メカトロニクス 講演会講演概要集, May 2014, 3A1-B02(1)-(4)
10)前田翔太郎,石井千春, “単孔式腹腔鏡下手術(SPS)用鉗子マニ ピュレータの開発と制御”, 日本機械学会 ロボティクス・メカ トロニクス講演会講演概要集, May 2014, 3A1-C02(1)-(4) [x-y plane(Horizontal)]
[y-z plane(Vertical)]
:Ideal trajectory :Tip of forceps
manipulator 𝑖 𝑚𝑚)