窓ガラス清掃ロボットに関する研究
香月, 良夫
九州大学大学院工学府
https://doi.org/10.15017/21998
出版情報:Kyushu University, 2011, 博士(工学), 課程博士 バージョン:
権利関係:
工学府
知能機械システム専攻
香月 良夫
目 次
第1章 はじめに 1
1.1 ビルの窓ガラス清掃 . . . . 1
1.2 窓ガラス清掃ロボットに必要な機能 . . . . 2
1.2.1 ロボットを窓ガラスに取り付ける機能 . . . . 2
1.2.2 小型窓ガラス清掃ロボットに必要な機能 . . . . 4
1.2.3 鉛直なガラス面上を落下せずに安定して移動する機能 . . . . . 5
1.2.4 汚れたガラス面を確実に清掃する機能 . . . . 8
1.2.5 鉛直なガラス面全体を確実に移動する機能 . . . . 10
1.2.6 ガラス面の汚れを検出する機能 . . . . 13
1.3 本論文の構成 . . . . 13
第2章 壁面移動ロボットの軌道追従制御法 15 2.1 壁面移動ロボットの動力学式 . . . . 17
2.2 壁面移動ロボットの軌道追従制御法 . . . . 22
2.3 目標軌道への漸近安定性の証明 . . . . 24
2.4 窓枠位置情報を利用した位置検出法 . . . . 29
2.4.1 窓枠位置情報を利用した窓ガラス清掃ロボットの位置検出法 . 29 2.4.2 窓枠位置情報を利用した位置検出法による検出誤差 . . . . 31
2.5 窓ガラス清掃ロボットを用いた軌道追従実験 . . . . 34
2.5.1 実験に使用する窓ガラス清掃ロボット . . . . 34
2.5.2 目標軌道での水平方向への直進能力の確認 . . . . 36
2.5.3 重力とその他の動力学による非線形な影響を補償する効果の 確認 . . . . 44
2.6 壁面移動ロボットの軌道追従制御法についての結論 . . . . 47
第3章 窓ガラスの汚れ検出 49 3.1 窓ガラスの汚れ . . . . 50
3.2 窓ガラス汚れ検出方法 . . . . 54
3.2.1 汚れがない場合 . . . . 55
3.2.2 指紋がある場合 . . . . 57
3.2.3 ほこりがある場合 . . . . 59
3.2.4 粒子径が大きい砂がある場合 . . . . 59
3.2.5 粒子径が小さい砂がある場合 . . . . 61
3.2.6 窓ガラス汚れ検出方法と検出原理についてのまとめ . . . . 63
3.3 窓ガラス汚れ検出センサ . . . . 63
3.4 窓ガラスを確実に清掃するための動作方法 . . . . 65
3.5 窓ガラスを確実に清掃するための動作を考慮した センサシステムの設計 . . . . 67
3.6 窓ガラスの汚れ検出実験 . . . . 69
3.7 汚れ検出センサを用いた確実な清掃動作の実験による確認 . . . . 73
3.7.1 ロボットが落とせる汚れの全てを1回目の直進で落とす場合 . 74 3.7.2 ロボットが落とせる汚れの一部しか1回目の直進で落とさな い場合 . . . . 77
3.8 窓ガラスの汚れ検出についての結論 . . . . 80
第4章 おわりに 81
謝 辞 84
参考文献 85
第 1 章 はじめに
1.1 ビルの窓ガラス清掃
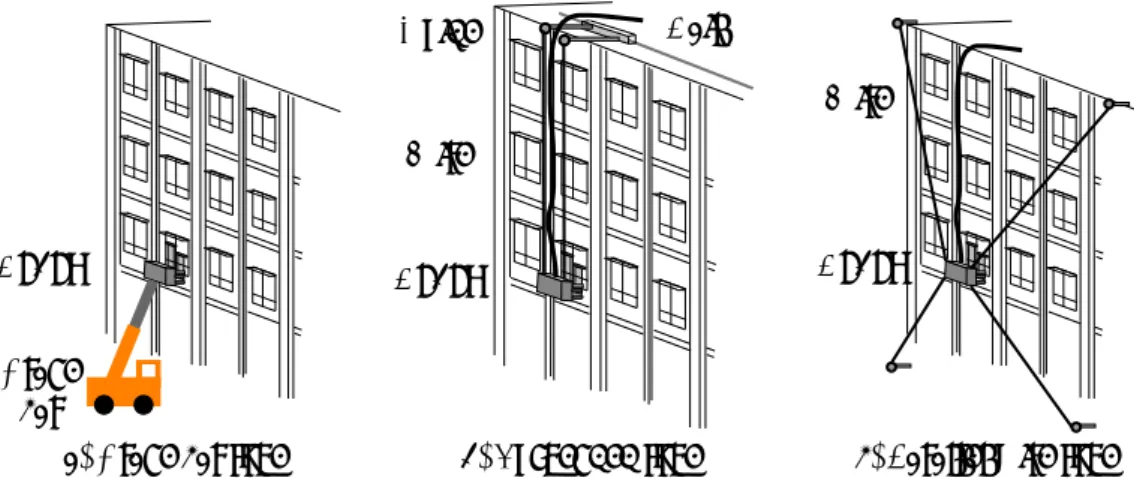
清掃作業の一つとして,ビルの窓ガラス清掃がある.ビルの窓ガラス清掃は,多 くの場合図1.1のように人かゴンドラをビルの屋上からワイヤでぶら下げて行われ ている.ビルには多数の窓ガラスがあるため,窓ガラス清掃は繰り返す回数が比較 的多い作業である.また,この清掃作業は作業者落下の危険性があり,多数の死亡 災害が発生している[1].さらに,人件費が多大となることからも,ロボットの適用 が強く望まれている.
ビルの窓ガラス清掃用の大型ロボット[2]が既に使用されている.このロボットは,
ビルの屋上を移動する装置からガイドレールに沿って,清掃ユニットをぶら下げて いる.しかし,大型ロボットは,一般に壁面にガイドレールと屋上部に大掛かりな 装置が必要であり,図1.2のような縦方向に凹凸がある壁面には適用できない.
また,大型窓ガラス清掃ロボットの欠点を考慮して,ビル壁面全体の窓ガラスの
Fig. 1.1 General glass cleaning
Fig. 1.2 Uneven wall
Fig. 1.3 Skid-steer type glass cleaning robot with suction cup
Fig. 1.4 Skid-steer type glass cleaning robot with magnets
清掃ではなく限定された窓ガラスのみの清掃を目的として,図1.3, 1.4に示すような 小型窓ガラス清掃ロボット[3]∼[9]が提案されている.窓ガラス清掃ロボットにおい ては,ロボットが窓ガラスの汚れを残さずに確実に清掃する能力が重要である.し かし,小型ロボットが窓ガラスを確実に清掃する機能は,十分な検討がなされてい るとは言えず,実現されていない.
そこで,本研究では,従来の大型窓ガラス清掃ロボットの適用が困難な,縦方向 に凹凸がある壁面についても適用可能な小型自走式ロボットによる窓ガラスの確実 な清掃を目的として,それを実現するための方法を検討する.
1.2 窓ガラス清掃ロボットに必要な機能
ロボットが窓ガラスを清掃するためには,ロボットを何らかの方法で対象とする 窓ガラスに取り付ける必要がある.そこで,まずロボットを窓ガラスに取り付ける 機能について検討する.
1.2.1 ロボットを窓ガラスに取り付ける機能
ロボットを特定の窓ガラスに取り付ける機能に関しては,山本ら[3]により様々な 議論がなされている.以降では,山本らの議論を参考にしてロボットを窓ガラスに 取り付ける機能について検討する.
(b) Suspended type (c) Parallel wire type W ire
Robot W ire
Robot
Guide Rail
(a) Crane car type Crane
car Robot
Fig. 1.5 Ideas of positioning of a glass cleaning robot on a glass window
従来の大型窓ガラス清掃ロボット[2]と同様に,ビル壁面にガイドレールを設置す ると,ロボットの適用は凹凸がない壁面に限定される.そこで,外壁に多少の凹凸 がある場合にも適用可能と考えられる図1.5の(a)∼(c)に示す取り付け方法について 検討する.
図1.5 (a)はクレーン車や高所作業車を使用してロボットを取り付ける方法である.
高所作業車に搭載したロボットアームにより清掃を行う方法[10]が提案されている.
しかし,クレーン車や高所作業車の操作に人手を必要とする.
図1.5 (b)はビル屋上部に設置する可搬式のロボット吊り下げ機構を使用する方
法である.ロボットの重量にもよるが,ビル屋上部の機構はそれなりの剛性を持つ しっかりとした固定機構が必要であり,大掛かりな装置になると考えられる.また,
屋上部に既に様々な機器が設置されていることがあるため,このような装置の固定 が困難な場合もある.
図1.5 (c)は複数の固定点よりワイヤを懸垂して,それらのワイヤ長の調整により,
ロボットを位置制御する機構を使用する方法である.この方法はロボットを簡便な 機構で位置・姿勢制御することに適している.しかし,ワイヤの固定部分が必要で あり,そこにはワイヤ巻き上げ用の電動機が必要となる.ロボットをビル壁面全て に移動させるためには,このワイヤ固定部分を分散配置する必要があり,その固定 部分の装置は大掛かりとなることが予想される.
また,これらの取り付け方法では,壁面の凹凸が大きい,またはその形状が複雑 なビルでは,ロボットを取り付けることが困難な窓ガラスがある.さらに,機構が ある程度大掛かりになるため,装置の運用コストが多大になると考えられる.
そこで,以降はビルの壁面全体を移動可能な大掛かりな清掃ロボット装置は考え ず,小型ロボットによる窓ガラス清掃の実現を目指す.ここで,小型とは人手で簡 単に持ち運びできる程度のものとする.
小型ロボットであることを考慮すると,ビルの壁面の凹凸部を乗り越えながら複 数の窓を自在に移動するための機構,およびそれを制御することが必要となる.し かし,一般にビルの壁面は様々な形状,材質であり,凹凸の度合いも異なっている.
したがって,ロボットにこれらを自律的に乗り越えて任意の窓ガラスへ移動する機 能を与えることは,複雑な移動機構と制御が必要となるため,現実的ではない.
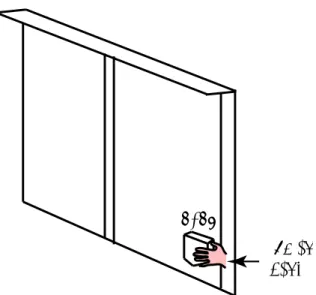
そこで,図1.6に示すように,清掃を必要としている人が,窓ガラスの内側から手 でロボットをガラス面に取り付けることとする.その後,ロボットは自律移動しな がら,その窓ガラス一枚を自動で清掃する.清掃が終了したら,人がロボットを取 り外す.別の窓ガラスの清掃が必要であれば,その窓に対して同じことを繰り返す.
これにより,ロボットを窓ガラスに取り付ける機能の問題は回避される.この方法 は,ロボットの取り付けを行うために人手はかかる.しかし,清掃中はロボットを 放置可能なため,他の作業ができるメリットがある.また,人の代わりにロボット が窓ガラスを清掃するため,作業者が落下する事故を防止できる.
1.2.2 小型窓ガラス清掃ロボットに必要な機能
本研究では,ビルの窓ガラスが一般に鉛直であるため,鉛直なガラス面を小型ロ ボットによる清掃の対象とする.ロボットが鉛直な窓ガラス面に取り付けられた後 に,その窓ガラス一枚を確実に清掃するためには,まず,鉛直なガラス面上を滑り 落ちることなく,安定して移動する必要がある.また,汚れた窓ガラスを確実に清 掃する機能が必要であり,汚れた場所を残さないように,ガラス面全体を確実に移 動する必要がある.最後に,清掃後に汚れが残っていないことを確認する必要があ る.これらをまとめると,小型ロボットが窓ガラス一枚を確実に清掃するためには,
Robot
Human hand
Fig. 1.6 Positioning of a glass cleaning robot on a glass window by human
以下の機能が必要であることが分かる.
・鉛直なガラス面上を落下せずに安定して移動する機能
・汚れたガラス面を確実に清掃する機能
・鉛直なガラス面全体を確実に移動する機能
・ガラス面の汚れを検出する機能
以降では,これらの機能について順に検討する.
1.2.3 鉛直なガラス面上を落下せずに安定して移動する機能
小型ロボットが窓ガラスに吸着する方法として,図1.3に示す負圧吸引式[3]∼[8]
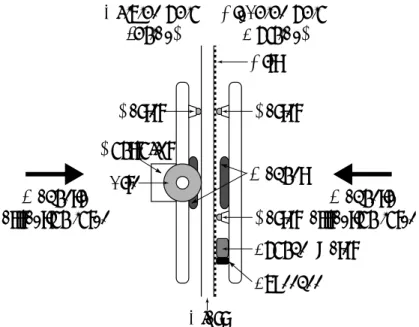
と図1.4に示す磁石吸着式[3], [9]が提案されている.図1.7に負圧吸引式の機構の例 を示す.負圧吸引式とは,ポンプを用いて吸盤内を減圧することによって吸着する 手法である.また,図1.8に磁石吸着式の機構の例を示す.磁石吸着式とは,ロボッ トを窓ガラスの内側に配置するユニットと外側に配置するユニットに分離し,磁力 により窓ガラスを両側から挟みこむことによって吸着する手法である.磁力の発生 方法としては,電磁石を使用する方法と永久磁石を使用する方法が考えられる.磁
石吸着式の場合は,両ユニットの磁石が窓ガラスを挟んで対応するように,取り付 け時に注意する必要がある.
また,負圧吸引式では,車輪や脚などの移動機構と清掃機構が窓ガラスの同じ側 に配置される.このため,移動機構も汚れがある側を移動し,汚れや水によって滑 りが生じやすくなり,安定して移動できない.これに対して,磁石吸着式では,車 輪や脚などの移動機構と清掃機構を窓ガラスの違う側に配置することができる.し たがって,この方法では移動機構が汚れが少ない側を移動可能なため,汚れや水の 影響を受けにくく,安定した移動が容易である.
以上の負圧吸引式と磁石吸着式についての議論をまとめると,負圧吸引式と電磁 石を使用する磁石吸着式,永久磁石を使用する磁石吸着式の利点と欠点はそれぞれ 以下のようになる.
(負圧吸引式)
利点: 吸引力を自由に設定できる.
欠点: ポンプへの電源供給トラブル等により,負圧がなくなると落下する.
車輪や脚などの移動機構が汚れや清掃用の水の影響を受ける.
(電磁石による磁石吸着式)
利点: 吸引力を自由に設定できる.
車輪や脚などの移動機構が汚れや清掃用の水の影響を受けない.
欠点: 電磁石への電源供給トラブル等により,磁力がなくなると落下する.
2つのユニットの磁石が窓ガラスを挟んで対応する必要があるため,ロボット の取り付け時に注意が必要である.
(永久磁石による磁石吸着式) 利点: 吸引の信頼性が高い.
車輪や脚などの移動機構が汚れや清掃用の水の影響を受けない.
欠点: 吸着力の自由な設定が困難.
2つのユニットの磁石が窓ガラスを挟んで対応する必要があるため,ロボット の取り付け時に注意が必要である.
Inside Outside
Tire
Suction cup Cleaner
Glass
Pump
Drive and control unit Attraction Tire
force
Fig. 1.7 Mechanism of the negative pressure suction type
Inside Outside
Magnet Caster
Glass
Caster
Drive and control unit Cleaner
Tire
Tire Magnetic
attraction force
Magnetic attraction force
Fig. 1.8 Mechanism of the magnetic attraction type
また,小型ロボットが鉛直なガラス面を含む鉛直面上を移動する機構として,図
1.3, 1.4に示すような,平面での移動効率が高く,簡便な機構で制御が容易な二輪独
立駆動型[3]∼[5], [11],ある程度の段差なら乗り越え可能なクローラ型[6], [12],窓 枠の乗り越えも可能な多脚型[7], [8], [13]が提案されている.それ以外にも,永久磁
Mop
Squeegee
Fig. 1.9 Cleaner for human work
Sponge Squeegee
Fig. 1.10 Sponge and squeegee 石で構成された車輪の傾斜配置による吸着走行機構[9]も提案されている.
本節での議論を踏まえて,ロボットが窓ガラスに吸着する方法として,吸引の信 頼性が高く,また移動機構が汚れや水の影響を受けにくいため安定した移動が容易 な永久磁石による磁石吸着方式を採用する.また,本研究では窓ガラス一枚の面上 の清掃に限定しているので,ロボットの移動機構として,平面での移動効率が高く 簡便な機構で制御が容易な二輪独立駆動型を採用する.永久磁石による磁石吸着式 と二輪独立駆動型移動機構により,鉛直なガラス面上を落下せずに安定して移動す る機能を実現する.
1.2.4 汚れたガラス面を確実に清掃する機能
従来の人手による窓ガラス清掃では,図1.9に示す清掃用具が用いられている.水 を含ませたスポンジもしくは布モップにより水をガラス面に付与し,汚れを浮き上 がらせた後に,スクイジと呼ばれるゴムブレードにより汚れと水をかき落として清 掃する.
窓ガラスの汚れをきれいに落とすためには,水(もしくは洗剤)の使用が不可欠 [3]であると考えられている.しかしながら,小型ロボットでは小型・軽量化のため に可能な限り水を使わずに清掃できることが望ましい.そこで,山本ら[3]は,小型 ロボットにおいて大量の水を使わずに実現可能と思われる以下の清掃方法の清掃性
能を比較検討している.まず,従来の人手による窓ガラス清掃で用いられてきた方 法と同様に,図1.10に示すスポンジとスクイジを使用する方法である.事前にスポ ンジに水や洗剤を含ませておく.洗剤には界面活性剤が含まれるものを使用してい る.次に,雑巾のような布を使った窓ガラス清掃も家庭で行われているので,一般 的な布よりも窓ガラスをきれいに清掃できる図1.11の上側に示す極細繊維タオルを 使用する方法である.極細繊維タオルとは非常に細かい繊維(マイクロファイバー)
でできた窓ガラス清掃専用のタオルである.この方法でも,スポンジとスクイジを 使用する方法と同様に,事前に水や洗剤を含ませておく.最後に,紙シートに予め 洗剤を含ませた窓ガラス専用の市販品である,図1.11の下側に示す「窓用おそうじ クロス」(株式会社プレステージ)と図1.12に示す「黄砂とりシート」(株式会社ウ イルソン)をそれぞれ使用する方法である.これらの方法をまとめると,以下のよ うになる.
(a)図1.10に示すスポンジとスクイジを用い,スポンジに水を含ませる方法 (b)図1.10に示すスポンジとスクイジを用い,スポンジに洗剤を含ませる方法 (c)図1.11の上側に示す極細繊維タオルに水を含ませる方法
(d)図1.11の上側に示す極細繊維タオルに洗剤を含ませる方法
(e)図1.11の下側に示す「窓用おそうじクロス」(株式会社プレステージ)を用いる 方法
(f)図1.12に示す「黄砂とりシート」(株式会社ウイルソン)を用いる方法
山本ら[3]による清掃性能の比較により,(a)の水を含ませたスポンジとスクイジ を使用する方法が,清掃効果が高いことが確認されている.また,(b)との比較によ り,この手法では洗剤を使用せず,水のみで十分に清掃効果が高いことも確認され ている.したがって,洗剤を洗い流すためのすすぎ作業を必要としないメリットが ある.さらに,同じ方法でも窓ガラス面に押し付ける力の大きさによって,汚れの 落ち具合が変わると予想されていたが,この手法では押し付け力による影響をほと んど受けないことも確認されている.したがって,過大な押し付け力を必要としな いため,ロボットに適用する場合にはその反力による吸着移動機構への影響を低減
Towel for glass cleaning
Cloth for glass cleaning
Fig. 1.11Special towel and cloth for glass cleaning
Fig. 1.12Sheet for cleaning yellow sand
できるメリットがある.
また,山本ら[3]により,水を含ませたスポンジとスクイジを使用する方法は,
(c)∼(f)のその他の拭き掃除による手法と比較して広い面積を清掃可能であり,清掃 能力の持続性が高いことも確認されている.ただし,水の量が清掃の結果に影響を 与えるため,十分な水の量がない場合は,より広い面積を清掃するほど汚れを落と しにくくなり,汚れが残る問題がある.この問題に対して山本らは,水をスポンジ 部に供給できるように図1.13に示す水タンク及び水回収用ポンプを取り付けた清掃 ユニット[3]を提案している.しかし,このユニットによる清掃実験では十分な水回 収が困難であることが確認されている.
以上の山本ら[3]による検討の結果を踏まえて,本研究では,図1.14に示すスポ ンジとスクイジをガラス面に押し付けながら引く清掃機構を採用する.水は事前に 人がスポンジに含ませておくものとする.広い面積を清掃する場合は,スポンジを 追加することで水の量を確保する.
1.2.5 鉛直なガラス面全体を確実に移動する機能
床清掃ロボットの動作制御方式は,使用する情報によって2つに分けられる.1つは,
局所的なセンサ情報に従って移動する反射行動型(reaction based type or behavior
Water tank
Sponge
Squeegee
Fig. 1.13Cleaning mechanism with water tank
Squeegee Sponge
Fig. 1.14Cleaning mechanism
Fig. 1.15Roomba (iRobot Corporation)
Robot
Window frame Glass
Dirt
Fig. 1.16Reaction-based control method based type)[14], [15]である.もう1つは,事前に得られた部屋形状の情報も利用す る計画行動型(plan based type or model based type)[16]∼[18]である.後者の方法 でロボットは,事前に得られた部屋形状の情報を基に部屋全体を少ない重複の軌道 で移動する経路を計画し,その計画された経路に従って移動する.しかし,一般に 部屋形状を正確に得るのは困難なため,図1.15に示すような市販されている家庭用 の床清掃ロボット[14]では,反射行動型を主体とする動作制御が行われている.
窓ガラス清掃においては,窓ガラスは一般に単純な矩形形状であるため,容易に ガラス面全体を少ない重複の軌道で移動する経路を計画でき,計画行動型を適用し やすい.これに対して,反射行動型では,図1.16に示すように汚れがある場所をロ ボットが通らない場合がある.また,同じ場所を必要以上に繰り返し移動して,清 掃時間が長くなることがある.したがって,小型ロボットが鉛直なガラス面全体を
Direction of gravity
Robot
W indow frame Glass
(a) Horizontal parallel motion
(b) Vertical parallel motion
(c) Contour parallel motion Fig. 1.17Desired trajectories for a glass cleaning
確実に移動する機能として,ロボットは計画行動型で窓ガラス全面を少ない重複の 軌道で移動すべきである.
窓ガラスは一般に矩形であるので,重複が少ない移動軌道としては,図1.17に示 す(a)水平パラレル動作,(b)鉛直パラレル動作,(c)沿輪郭動作による軌道が考え られる.ただし,窓ガラス清掃では水を使うため,鉛直パラレル動作と沿輪郭動作 では清掃後の水が垂下して清掃した場所を汚すことがある.したがって,鉛直なガ ラス面全体を確実に清掃するためには,水平パラレル動作による目標軌道を追従し て,窓の上側から下側へ移動しながら清掃することが望ましい.
鉛直なガラス面上を移動する窓ガラス清掃ロボットは,壁面移動ロボットの1つ であると考えられる.小型壁面移動ロボットが水平パラレル動作軌道を追従するた めの制御法として,三宅らにより二輪独立駆動型壁面移動ロボットの姿勢制御法[4]
が提案されている.ロボットは姿勢制御法によって,重力方向に沿った鉛直方向に は容易に直進できる.しかし,壁面移動ロボットはすべりにより重力方向に沿った 鉛直方向に下がりやすく,姿勢制御のみでは一旦位置誤差が発生するとその誤差を 修正できない.このため,水平パラレル動作軌道での水平方向への直進は困難であ る.さらに,二輪独立駆動型壁面移動ロボットにおいては,駆動トルクに対する重 力と遠心力などの動力学の影響がロボットの姿勢により変化するために,軌道追従
性能に悪影響を及ぼす.したがって,本研究では,小型窓ガラス清掃ロボットが鉛 直なガラス面全体を確実に移動する機能を実現するために,重力とその他の動力学 の影響を逆動力学計算により補償する二輪独立駆動型壁面移動ロボットの軌道追従 制御法を提案する.
1.2.6 ガラス面の汚れを検出する機能
ガラス面全体を確実に移動する機能により,ロボットが窓ガラス全面を確実に移 動したとしても,例えば清掃ユニットの機能不備のため汚れが残る可能性があり,窓 ガラスが実際にきれいになっているかは不明である.このため,ガラス面の汚れを 検出する機能があることが望ましい.ロボットが移動しながら窓ガラスの汚れをオ ンラインで検出可能であるなら,汚れを落とせなくなるまで移動を繰り返すことが 可能となる.これにより,ロボットが落とすことが可能な汚れを確実に落とすこと ができる.
これまでガラスの汚れの検出は,ほとんどは人の視覚によって主観的に行われて きた.客観的な汚れの検出手法としては,窓ガラスについて,汚れの有無によって 変化する窓ガラスの透過光量を測定する方法[19]が提案されている.また,車のガ ラスについて,汚れの有無によって変化するガラス内の全反射の光量を測定する方
法[20],カメラを車内に設置して画像処理によって汚れを検出する方法[21]が提案
されている.しかし,いずれの方法もガラス一枚ごとにガラス自体かその周囲に測 定機器かカメラが必要なため,設置のための労力が大きく,コストも高くなる.そ こで,本研究では,ロボットがガラス面の汚れを検出する機能実現のために,ロボッ トに搭載可能な窓ガラス汚れ検出センサを提案する.さらに,本センサを用いて窓 ガラスを確実に清掃するための動作方法も提案する.
1.3 本論文の構成
本研究では,小型ロボットによる窓ガラスの確実な清掃を目的として,それを実 現するための方法を検討する.本論文の構成を以下に示す.
鉛直なガラス面上を移動する窓ガラス清掃ロボットは,壁面移動ロボットの1つ である.そこで第2章では,小型窓ガラス清掃ロボットが鉛直なガラス面全体を確 実に移動する機能を実現するために,重力とその他の動力学の影響を逆動力学計算 により補償する二輪独立駆動型壁面移動ロボットの軌道追従制御法を提案する.
まず,重力とその他の動力学の影響を逆動力学計算により補償するために,壁面 移動ロボットの動力学式を求める.次に,その動力学式を用いて,ロボットの姿勢 情報のみでなく位置情報も用いた軌道追従制御法を提案する.そして,提案手法の 漸近安定性をリアプノフの安定定理を用いて示す.実際の窓ガラス清掃ロボットを 用いた実験により,提案手法によって目標軌道での水平方向への直進が可能となる ことを確認する.また,重力とその他の動力学の影響を補償する効果の確認も行う.
第3章では,まず,小型窓ガラス清掃ロボットがガラス面の汚れを検出する機能 の実現のために,ロボットに搭載可能で客観的な汚れ検出方法を用いた窓ガラス汚 れ検出センサを提案する.本センサは発光部と受光部を有していて,汚れの程度に よって変化する窓ガラスからの反射光量を測定することにより汚れを検出する.次 に,本センサを搭載したロボットが汚れを落とせなくなるまで移動を繰り返すこと によって,落とすことが可能な汚れを確実に清掃するための動作方法を提案する.そ して,実験により提案する汚れ検出センサによって窓ガラスの汚れを検出可能であ ることを示す.また,提案する動作方法によって,ロボットが落とすことが可能な 汚れを確実に清掃できることも確認する.
第 2 章 壁面移動ロボットの軌道追従 制御法
小型窓ガラス清掃ロボットが,鉛直なガラス面全体を確実に移動するためには,
窓ガラス全面を少ない重複の軌道で移動可能な水平パラレル動作による目標軌道を 追従すべきである.ここで,鉛直なガラス面上を移動する窓ガラス清掃ロボットは,
壁面移動ロボットの1つであると考えられる.
小型壁面移動ロボットが水平パラレル動作軌道を追従するための制御法として,
三宅らにより二輪独立駆動型壁面移動ロボットの姿勢制御法[4]が提案されている.
この手法では,ロボットの走行加速度は重力加速度より十分に小さいと考えて,加 速度センサを用いて重力方向を検出する.そして,重力方向を基準にロボットの姿 勢情報を得て,ロボットの姿勢が目標姿勢と一致するように制御する.これにより,
水平パラレル動作による目標軌道において,鉛直方向への直進や方向転換が可能と なる.しかし,姿勢制御法では,ロボットがすべりにより鉛直方向に下がり,一旦 位置誤差が発生すると,その誤差を修正できない.このため,水平パラレル動作に よる目標軌道において,水平方向への直進は困難である.したがって,姿勢情報の みではなく,位置情報も用いる軌道追従制御法を検討する.
二輪独立駆動型移動ロボットの軌道追従制御法については,様々な研究がなされ ていて,運動学レベルで目標軌道への漸近安定性を保証する軌道追従法[22], [23]が 提案されている.また,壁面に沿った目標軌道の追従のみを議論した研究[24],壁 に囲まれた限られた空間内での走行を議論した研究[25],画像処理を行い,視覚情 報を用いる追従を議論した研究[26]がある.しかし,これらの手法は運動学レベル で議論されているため,ロボットの動力学の影響により目標速度を実現できず,目 標とする軌道を追従できない場合がある.
動力学の影響を考慮した移動ロボットの軌道追従制御法としては,運動学モデル の制御を基にしたバックステッピング法による動力学モデルの軌道追従制御法[28]
が提案されている.また,未知パラメータを含む二輪独立駆動型移動ロボットを対 象とした研究[27],運動学モデルの制御を基にしたバックステッピング法による動 力学モデルの軌道追従制御法移動マニピュレータを対象とした研究[29], [30]がある.
移動マニピュレータについての研究[30]では,水平面のみでなく転倒したりすべり 落ちたりしない程度の斜面を走行する場合についても議論されている.しかし,こ れらの研究はいずれも水平面または斜面を移動するロボットを対象としており,窓 ガラス清掃ロボットのように鉛直面を移動する壁面移動ロボットについては議論さ れていない.
鉛直面を移動するロボットが水平面を移動するロボットと大きく異なる点は,水 平面を移動するロボットでは重力が走行面に対して垂直方向にかかるのに対して,
鉛直面を移動するロボットでは重力が走行面に対して平行方向にかかることである.
このため,重力による駆動トルクへの影響がロボットの姿勢によって変化する.ま た,遠心力などのその他の動力学が車輪のころがり抵抗として駆動トルクに与える 影響も,ロボットの姿勢によって変化する.これらにより,ロボットの軌道追従性 能が低下する.したがって,水平面を移動するロボットについて提案されてきた従 来手法を,鉛直面を移動する壁面移動ロボットにそのまま適用することはできない.
また,軌道追従制御法を実現するためには,壁面移動ロボットの位置情報が必要 となる.しかし,窓ガラス清掃ロボットにおいてはガラス面と車輪間にすべりが生 じるため,車輪の回転角情報を用いて正確な自己位置推定を行うことが困難である という問題もある.
そこで本章では,二輪独立駆動型壁面移動ロボットについて,まず,重力とその 他の動力学の影響を逆動力学計算により補償するために,鉛直なガラス平面上を移 動するロボットの動力学式を,ロボットの動作の拘束条件を考慮して求める.次に,
その動力学式を用いて,金山らの軌道追従制御法[22]を基にロボットの姿勢情報の みでなく位置情報も用いた軌道追従制御法を提案する.そして,池田らの移動マニ ピュレータについての軌道追従制御法[29]を参考に,リアプノフの安定定理を用い
て提案手法の漸近安定性を示す.また,提案手法を窓ガラス清掃ロボットに適用す るために必要なロボットの位置情報を,窓枠の位置情報を利用して検出する方法も 提案する.さらに,実際の窓ガラス清掃ロボットを用いた実験により,従来の姿勢制 御のみの手法では困難な目標軌道での水平方向への直進が,提案する軌道追従制御 法によって可能となることを確認する.また,重力とその他の動力学の影響を補償 することにより,目標軌道への収束性が向上することも確認する.以上により,小 型窓ガラス清掃ロボットが,窓ガラス全面を少ない重複の軌道で移動可能な水平パ ラレル動作による目標軌道を追従可能となる.これによって,ロボットが鉛直なガ ラス面全体を確実に移動する機能が実現される.
2.1 壁面移動ロボットの動力学式
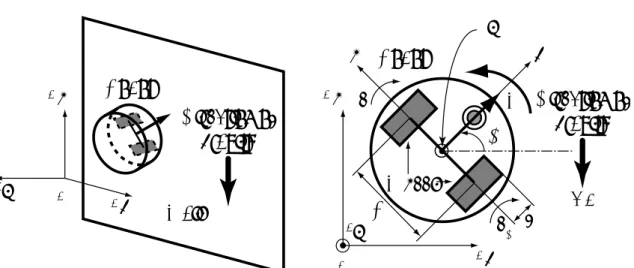
本節では,鉛直な平面上を移動する二輪独立駆動型壁面移動ロボットについて,重 力とその他の動力学の影響を逆動力学計算により補償するために,図2.1に示す機 構の動力学式をロボットの動作の拘束条件を考慮して求める.ロボットは磁石によ る非接触式吸着ユニットによって吸着力Nを生じる.ここで,タイヤと鉛直面との 摩擦は十分に大きいとし,タイヤは滑らないと仮定する.また,壁面移動ロボット としているため,清掃機構の影響は考慮しないものとする.
図2.1においてΣW は基準座標系を表し,Wx軸が水平方向,Wy軸が鉛直上向き方 向であり,Wx−Wy平面が鉛直な平面である.Σ0は左右車輪を結ぶ軸の中間に原点 を固定し,ロボットの進行方向に0x軸を,車軸方向に0y軸をとる.また,右手系 に従って0z軸を決定する.ロボットは並進速度V0,角速度Ω0で移動し,−Wy軸方 向に重力加速度gがかかる.左右車輪も含めたロボット全体の質量をm,0z軸まわ りの慣性モーメントをIZとする.左右車輪間の距離をT とし,車輪の半径をrとす る.ここで,θは基準座標系におけるロボットの姿勢を表す.また,図2.2に0x軸 の正側から見たロボット,図2.3に0y軸の負側から見たロボットを示す.ロボット の重心が左右車輪を結ぶ軸上の中心から距離Hの位置に,キャスタが左右車輪を結 ぶ軸上の中心から距離lにあるとする.
x y
Σ
W WW
θ
Σ
0 x
y 0
T r
V
0
Direction of gravity Ω
L
q.R
q.
0 0
Wheel Robot
0z
mg
Wz Robot
x Wall y
Σ
WW W
Wz
Direction of gravity
Fig. 2.1 Notation for the dynamics model of the robot
fVR
fVL
T Center of
gravity H
Wall
mgcosθ y
Σ0 0z
0
0x mV0Ω
0
fCL
fCR
Fig. 2.2 Constraints of rotation about the roll axis
まず,上記の表記を用いて,ロボットの並進運動についての動力学式と,鉛直面 に垂直な0z軸まわりのロボットの回転運動についての動力学式をそれぞれ記述する.
車輪による走行では,垂直抗力に比例するころがり抵抗が車輪に発生[30], [31]し,
V
µfVR τR
τL
fVL
µ f
fVR
fVL VC
l
0
Attraction unit
Wall
N Caster
Wheel
mgsinθ
0y x
Σ0 0z
0
Fig. 2.3 Constraints of rotation about the pitch axis
駆動トルクに影響を与える.ここで,符号関数sgnを以下のように定義する.
sgnu=
1 (u >0) 0 (u= 0)
−1 (u <0)
(2.1)
車輪と鉛直面間のころがり抵抗を考慮し,符号関数sgnを用いると,ロボットの並 進運動についての動力学式は以下のようになる.
mV˙0 = τL+τR
r −mgsinθ−µ(fV Lsgn ˙qL+fV Rsgn ˙qR) (2.2) ここで,τL,τRは左右車輪の駆動トルクを,q˙L, ˙qRは左右車輪の角速度を,fV L, fV R
は左右車輪の垂直抗力をそれぞれ表す.また,µは左右車輪と鉛直面のころがり抵抗 係数である.キャスタと鉛直面のころがり抵抗係数は,車輪と鉛直面のころがり抵 抗係数µと比較して微小であるとして,キャスタのころがり抵抗は考慮していない.
また,ロボットの並進運動についての動力学式と同様に,車輪と鉛直面間のころ がり抵抗を考慮すると,鉛直面に垂直な0z軸まわりのロボットの回転運動について の動力学式は以下のようになる.
IZΩ˙0 =−(τL−τR)T
2r +µT
2 (fV Lsgn ˙qL−fV Rsgn ˙qR) (2.3)
次に,ロボットの動作の拘束条件の式として以下の4つの条件式が得られる.
1つ目は,ロボットの車輪は鉛直面上を滑らないとしているので,図2.2におい てロボットが車軸方向に移動しないための条件式として,車軸方向の力のつり合い より
mV0Ω0+mgcosθ=fCL+fCR (2.4) と書ける.ここで,fCL, fCRは左右車輪に働く車軸方向の力を表す.
2つ目は,図2.3において吸着力N が車輪の垂直抗力fV L, fV Rとキャスタの垂直 抗力fV Cの和とつり合うための条件式として,
N =fV L+fV R+fV C (2.5)
となる.
3つ目は,図2.2においてロボットが0x軸まわりに回転しない,すなわち片側の車 輪が浮き上がらないための条件式として,0x軸まわりのモーメントのつり合いより
mgHcosθ =−(fV L−fV R)T
2 −(fCL+fCR)r (2.6) と書ける.
4つ目は,図2.3においてロボットが0y軸まわりに回転しない,すなわちキャス タが浮き上がらないための条件式として,0y軸まわりのモーメントのつり合いより
mgHsinθ= (τL+τR)−fV Cl+µr(fV Lsgn ˙qL+fV Rsgn ˙qR) (2.7) となる.
また,V0とΩ0は,q˙ = [ ˙qL,q˙R]T を用いて次のように表すことができる.
˙ p=
[ V0 Ω0
]
= [ r
2 r
−Tr T2r
] [
˙ qL
˙ qR
]
=Jq˙ (2.8)
壁面移動ロボットの動力学式(2.2), (2.3)は,ロボットの動作の拘束条件式(2.4)∼(2.7) を用いて,fV L, fV R, fV C, (fCL +fCR)を消去すると,ロボットの並進速度V0と角 速度Ω0,左右車輪の角速度q˙L, ˙qRの式として表すことができる.ここで,式(2.8)
及びその時間微分を用いると,壁面移動ロボットの動力学式は左右車輪の角速度q˙L,
˙
qRの式として,以下のようにまとめることができる.
Mq¨+D(p,q) =˙ M J−1p¨+D(p,q) =˙ τ (2.9) ただし
M =
mr2
4
l+µrsgn ˙qR l+µrsgn ˙qL+µrsgn ˙qR
+IZr2 T2 mr2
4
l+µrsgn ˙qL
l+µrsgn ˙qL+µrsgn ˙qR − IZr2 T2 mr2
4
l+µrsgn ˙qR
l+µrsgn ˙qL+µrsgn ˙qR −IZr2 T2 mr2
4
l+µrsgn ˙qL
l+µrsgn ˙qL+µrsgn ˙qR +IZr2 T2
D(p,q) = [D˙ L, DR]T DL = [
mglrsinθ+µmgr2sinθsgn ˙qR +µr{N l− 2mg(H+r)l
T cosθ+mgHsinθ+mlr3
T2 ( ˙qL2 −q˙R2)}sgn ˙qL
−2µ2r2{2mg(H+r)
T cosθ−mr3
T2 ( ˙q2L−q˙2R)}sgn ˙qLsgn ˙qR ]
/{2(l+µrsgn ˙qL+µrsgn ˙qR)} DR = [
mglrsinθ+µmgr2sinθsgn ˙qL +µr{N l+ 2mg(H+r)l
T cosθ+mgHsinθ− mlr3
T2 ( ˙qL2 −q˙R2)}sgn ˙qR +2µ2r2{2mg(H+r)
T cosθ−mr3
T2 ( ˙qL2 −q˙R2)}sgn ˙qLsgn ˙qR ]
/{2(l+µrsgn ˙qL+µrsgn ˙qR)} τ = [τL, τR]T
ここで,M は慣性行列であり,D(p,q)˙ は重力とその他の動力学の影響を表す非線 形項である.
Desired path
θ
x
0y
0
(x ,d y )d
X Ye
e
θ
dθ
eΣ
0( x,W W y)
Wy
Σ
W WxFig. 2.4 Trajectory tracking control errors
2.2 壁面移動ロボットの軌道追従制御法
本節では,二輪独立駆動型壁面移動ロボットについて,2.1節で求めた動力学式 を用いて,ロボットの姿勢情報のみでなく位置情報も用いた軌道追従制御法を提案 する.
図2.4におけるロボットの並進方向の誤差Xe,車軸方向の誤差Ye,及び姿勢の誤 差θeは
Xe
Ye θe
=
cosθ sinθ 0
−sinθ cosθ 0
0 0 1
xd−Wx yd−Wy θd−θ
(2.10)
となる.ここで,Wx, Wy,θはΣWにおけるロボットの位置と姿勢を,xd, yd,θdは目 標軌道を示している.また,目標速度Vd=√
˙
x2d+ ˙yd2,目標角速度Ωd= ˙θdである.
車軸方向には移動できないという非ホロノミック拘束を受ける二輪独立駆動型の 移動ロボットについて,運動学レベルでの目標軌道への収束性を保証する軌道追従 制御法[22]が,金山らにより提案されている.しかし,この制御法は,目標速度が
ロボットの速度として確実に実現されることを想定したものである.ゆえに,重力 とその他の動力学の影響により目標速度の実現が困難な壁面移動ロボットにそのま ま適用することはできない.そこで,式(2.9)をもとに逆動力学計算を行い,これら の影響を補償する.
まず,金山らの制御手法[22]に従って,運動学レベルでの軌道追従制御式を以下 のようにする.
˙ pc=
[ Vc Ωc
]
= [
Vdcosθe+kxXe Ωd+Vd(kyYe+kθsinθe)
]
(2.11) Vc, Ωcは軌道追従制御出力速度,角速度であり,kx, ky, kθは正の値をもつ軌道追従 制御ゲインである.Vc, Ωcが時間遅れなく実現されると仮定すると,Xe, Ye, θe → 0(t → ∞)となることが,リアプノフの安定定理を用いて保証されている[22].また,
Xe, Ye, θe →0(t→ ∞)より,式(2.11)から,t → ∞のとき,Vc →Vd, Ωc →Ωdと なる.
実際のロボットの速度V0,角速度Ω0と軌道追従制御出力速度Vc,角速度Ωcの誤 差を,それぞれVe = V0−Vc, Ωe = Ω0 −Ωcとおく.ここで,t → ∞のとき,Xe, Ye, θe, Ve, Ωeの値がすべて0に収束すると仮定すると,図2.5に示すように,V0,Ω0
は,式(2.11)で得られるVc, Ωcと等しくなるので,目標速度Vd,角速度Ωdと等し くなることが期待できる.したがって,t→ ∞のとき,Xe,Ye, θe,Ve, Ωeの値がす べて0に収束することを保証する軌道追従制御法を提案する.
制御出力加速度p¨∗を速度のPI制御として,式(2.11)及びその時間微分と時間積 分を用いて以下のようにする.
p¨∗ = ¨pc+Kp( ˙pc−p) +˙ Ki(pc−p) (2.12) ここで,Kp = diag(kp, kp), Ki = diag(ki, ki)であり,kp, kiは正の値をもつゲイン である.次節で目標軌道への漸近安定性を証明するために,kp, kiを左右車輪で同 じ値にする.動力学式(2.9)に式(2.12)をp¨∗ = ¨pとして代入して,重力とその他の 動力学の影響を補償する窓ガラス清掃ロボットの軌道追従制御入力トルクτ を以下
Ω0
V0 Ωc Vc
Ωd Vd
Robot
Robot Desired
trajectory
Trajectory by Kanayama’s method
Trajectory by proposed control method
Fig. 2.5 Idea of proposed control method
のように提案する.
τ = M J−1p¨∗+D(p,q)˙
= M J−1{p¨c+Kp( ˙pc−p) +˙ Ki(pc−p)}+D(p,q)˙ (2.13) 図2.6に提案手法のブロック線図を示す.
2.3 目標軌道への漸近安定性の証明
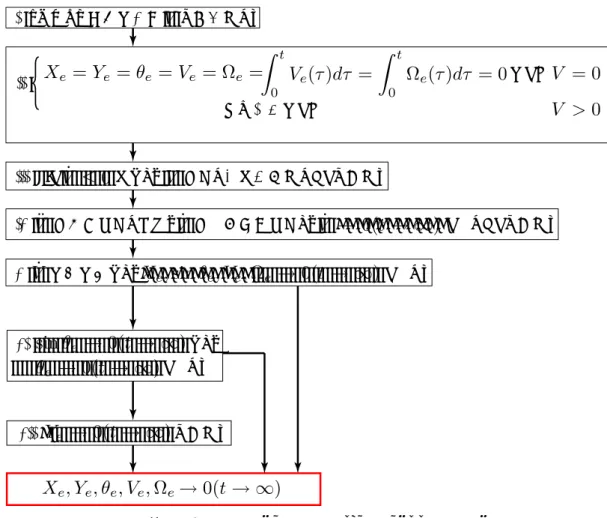
本節では,2.2節で提案した軌道追従制御法によるロボットの目標軌道への漸近安 定性を,池田らによって提案されている移動マニピュレータについての軌道追従制 御法[29]を参考に,以下に示すリアプノフの安定定理を拡張したラ・サールの定理 を用いて証明する.
リアプノフの安定定理
˙
x=f(x),f(xe) = 0のシステムにおいて,
(i) Vs(x)>0,Vs(xe) = 0
(ii) Vs(x)>0は時間で連続微分可能で,Vs(x)˙ <0 (x̸=xe) を満たすスカラ関数Vs(x)がxeの近傍で存在するとき,
xeは局所漸近安定である.
= MJ p+D( p , q ) p = p +K ( p - p)+K ( p - p )c p c i c τ
Error calculation
Trajectory tracking control
Inverse dynamic model
Robot kinematics
Wx
Wy θ x d
y d
θd
Proposed controller
-1 *
*
Robot cosθ sinθ 0 x - xdW
Xe
0 0 1 θd - θ θe
-sinθ cosθ 0 y - ydW
Ye = V V cos +k X
+V (k Y +k sin )θ
c θ
c d
d d e
e e x
y θ
e
Ω p = =c Ω
V 0
Ω0
p = +
-
Robot dynamics J -1
q p
1 s
Fig. 2.6Block diagram of trajectory tracking control with compensation of gravity and other dynamical effects
ラ・サールの定理
˙
x=f(x),f(xe) = 0,x(0) =x0のシステムにおいて,
(i) Vs(x)>0,Vs(xe) = 0
(ii) Vs(x)>0は時間で連続微分可能で,Vs(x)˙ ≤0 (x̸=xe) (ii) ˙Vs(x)≡0を仮定したとき,微分方程式の解がx(t) = xeのみ を満たすスカラ関数Vs(x)がxeの近傍で存在するとき,
xeは局所漸近安定である.
図2.7に証明の構成を示す.(i)∼(viii)の順に従って,Xe,Ye,θe,Ve, Ωe,∫t
0 Ve(τ)dτ,
∫t
0 Ωe(τ)dτ →0(t→ ∞)を示す.
(iii)㻌㻔㼕㻕䛸㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌䛻䜘䜚䠈㻌㻌㻌㻌㻌䛜䛒䜛್䛻᮰䛩䜛䛣䛸䜢♧䛩䠊
(iv)㻌㻌㻌㻌㻌䛜᭷⏺䛷䛒䜛䛯䜑䠈㻌㻌㻌㻌䛜୍ᵝ㐃⥆䛷䛒䜚䠈㻌㻌㻌㻌䚷䚷䚷䚷䚷䚷䚷䚷䚷䚷䚷䛸䛺䜛䛣䛸䜢♧䛩䠊
(v)㻌㻌㻌㻌㻌䛾ᘧ䛾ᙧ䜘䜚䠈䚷䚷䚷䚷䚷䚷䚷䚷䚷䚷䚷㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌䛸䛺䜛䠊
(vi)㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌䜘䜚䠈 㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌䛸䛺䜛䠊
(vii)䚷㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌㻌䜢♧䛩䠊 (i)㻌䝸䜰䝥䝜䝣㛵ᩘ䛾ೃ⿵㻌㻌㻌㻌䜢Ỵᐃ䛩䜛䠊
䛻䜘䜚䠈㻌㻌㻌㻌䛜ṇᐃ㛵ᩘ䛷䛒䜛䛣䛸䜢♧䛩䠊 䛭䜜௨እ䛾䛸䛝 (ii)㻌 䛾䛸䛝
Fig. 2.7 Flow of asymptotical stability proof
(i)まず,リアプノフ関数の候補を次式のように定める.
V = kx(Xe2+Ye2) + 2kx
ky (1−cosθe) + 1 2kp
{
Ve2+ki (∫ t
0
Ve(τ)dτ )2}
+ kx 2kykθkpVd
{
Ω2e+ki (∫ t
0
Ωe(τ)dτ )2}
(2.14)
(ii)制御ゲインkx,ky,kθ,kp,ki >0より式(2.14)は,Xe,Ye,θe,Ve, Ωe,∫t
0 Ve(τ)dτ,
∫t
0 Ωe(τ)dτの値が全て0のときV = 0となり,それ以外のときはV >0となる正定 関数である.