2007 年度 修士論文
歩行者ナビゲーションにおける
道路標識による現在位置測位手法に関する研究
指導教員 戸川 望 准教授
早稲田大学大学院 理工学研究科 情報・ネットワーク専攻
3606U020-1 大平 英貴
2008 年 2 月 8 日
目 次
第1章 序論 1
1.1 本論文の背景と意義 . . . . 2
1.2 本論文の概要 . . . . 4
第2章 背景 6 2.1 本章の概要 . . . . 7
2.2 システム構成と問題点 . . . . 7
2.3 既存の位置測位システム . . . . 7
2.3.1 ICタグを読み取る位置測位手法 . . . . 7
2.3.2 点字ブロックを使った位置測位手法 . . . . 9
2.4 既存の道路標識認識手法 . . . . 10
2.4.1 学習アルゴリズムを用いた道路標識識別手法 . . . . 10
2.4.2 高速化を目的とした道路標識識別手法 . . . . 10
2.5 本章のまとめ . . . . 12
第3章 撮影した道路標識画像を用いた現在位置の測位システム 13 3.1 本章の概要 . . . . 14
3.2 提案手法の特徴 . . . . 14
3.3 提案アルゴリズムの詳細 . . . . 14
3.3.1 道路標識の目視可能範囲による位置測位手法 . . . . 14
3.3.2 道路標識の位置による位置測位手法 . . . . 15
3.4 道路標識を色・形状まで識別した場合と,シンボルまで識別した場合との位 置測位にかかる速度,位置測位精度の比較 . . . . 20
3.5 本章のまとめ . . . . 21
第4章 位置測位のための道路標識の撮影手法と認識手法 23 4.1 本章の概要 . . . . 24
4.2 提案手法の目的 . . . . 24
4.3 提案手法のアルゴリズムの内容 . . . . 24
4.3.1 サーバが受信した画像の拡大処理 . . . . 24
目 次
4.3.2 RGB画像からY,Cr,Cb画像への変換処理 . . . . 26
4.3.3 色の強さの算出 . . . . 26
4.3.4 エッジ抽出 . . . . 27
4.3.5 ハフ変換 . . . . 27
4.3.6 θ方向における画素値合計の最大位置を検出 . . . . 28
4.3.7 ρ方向における画素値の合計の分布を算出 . . . . 31
4.3.8 特定の形状の認識 . . . . 31
4.3.9 標識のシンボルの特定 . . . . 32
4.3.10 標識の位置の特定 . . . . 32
4.3.11 画像の3値化 . . . . 33
4.3.12 テンプレートマッチング . . . . 33
4.4 本章のまとめ . . . . 35
第5章 シミュレーションによる提案手法の評価 36 5.1 本章の概要 . . . . 37
5.2 位置測位システムのシミュレーション実験の条件 . . . . 37
5.3 位置測位システムのシミュレーション結果 . . . . 37
5.4 道路標識識別アルゴリズムのシミュレーション実験の条件 . . . . 41
5.5 道路標識識別アルゴリズムのシミュレーション結果 . . . . 41
5.6 道路標識識別アルゴリズムにおける既存手法と提案手法の比較 . . . . 42
5.7 本章のまとめ . . . . 45
第6章 結論 46
謝辞 49
参考文献 50
本論文に関する発表業績 52
第 1 章
序論
第1章 序論
1.1 本論文の背景と意義
移動体通信の発展により,移動中における音声や画像の通信が可能となり,移動中の電子 データの送受信,GPS(Global Positioning System)を利用したカーナビゲーションシステム や歩行者ナビゲーションシステムが利用されるようになっている[7].
カーナビゲーションシステムでは,方位センサ,速度センサが車内に搭載されており,こ れらのセンサを利用することでGPSへのアクセスを減らし,地図情報更新時間の短縮を行 うことができる.また,GPSから得られた位置情報が地図情報の道路上に一致しない場合,
位置情報を道路上の位置に補正するマップマッチング技術が用いられている[9].
次世代移動体通信のための無線通信のインフラは,次世代移動体通信サービスIMT2000(International
Mobile Telecommunication) の開始により,伝送速度が移動体が高速動作している状態で
144kbps,歩行程度の動作状態で384kbps,静止状態では最大2Mbpsの通信速度での無線
通信が予定されている[15].このため,音声に加えて文章,静止画像,動画など様々なコン テンツのリアルタイム受信が可能となる[14].
歩行者ナビゲーションを目的とした位置測位技術の開発は“携帯電話からの緊急通報にお ける発信者位置情報通知機能に係る技術的条件の策定”[26]やLSI技術の進歩より小型の携
帯端末[16],[3]にGPS受信機を搭載する事が可能になったこと[18].等によって加速してき
ている.
現在の歩行者ナビゲーションにおける測位方式はGPSを使った手法が一般的であるが,歩 行者ナビゲーションにおけるGPS機能には,カーナビゲーションシステムのような測位し た位置の補正機能は無く,建物等によるGPS信号の遮蔽やマルチパス,利用可能な衛星の 制限等によって位置測位の精度は著しく低下する[11].このため,利用者はGPSの示す位置 が正しい場所であるのか判断することができず,利用者に混乱を与える結果となってしまっ ている.
GPSでは測位できない場所での位置測位の研究としてICタグを読み取る位置測位手法や 利用者が撮影した画像を用いた位置測位手法等が提案されている.ICタグを読み取る手法 は[5]等で提案されている.この手法ではICタグを新たなインフラとして設置するコストが 必要であり,読み取り側にも専用のデバイスを備える必要がある.利用者が撮影した画像を 用いた手法は,[20]等で提案されている.[20]では位置を測位したい場所に点字ブロックを 設置し,その並び方を識別すことによって位置を測位する.この手法では位置を測位したい 場所に点字ブロックを設置するコストが必要となる.
そこで我々はGPS誤差を補正することで利用者に正しい位置を示すシステムを提案してい
る[17],[6].本システムは既存のインフラ・デバイスであるカメラ機能付き携帯電話,GPS,
地図サーバによって構成されている.本システムでは,まず,携帯電話によって撮影された
第1章 序論 道路標識画像とGPSによる位置情報を地図サーバへ送る.地図サーバは,受信した画像か ら道路標識を識別する.利用者が撮影された道路標識が目視できる位置に存在するという観 点から,受信したGPS誤差範囲を道路標識が目視できる範囲によって絞り込むことで利用 者の位置を測位する.これにより低コストの位置測位が可能となる.
本システムの処理のうち最も重要な処理の1つが道路標識の識別である.道路標識の識別 は高速化・高精度化が必要となる.高速化は一般的に“3秒ルール[23]”といわれているよう に,3秒以内が望ましい.高精度化は晴天や夕焼けのような環境であっても正しい識別が可 能なことが望まれる.
[1],[21],[8]等では学習アルゴリズムを用いた道路標識識別手法が提案されている.これ
らは学習アルゴリズムを利用することで高精度の道路標識認識を実現している.しかし,学 習アルゴリズムを用いる手法は識別できる画像の種類が増えると低速化する欠点を持つ.[4],
[12]等では高速化を目的とした手法が提案されている.[4]では,まず,HSI空間から輝度,
彩度を使い輝彩度を求め,これにより標識の候補を抽出する.標識の形状の識別には,道路 標識が左右対称形であることを利用して,シンメトリフレームワークによって識別を行う.
標識の種類の識別では,標識中のシンボル領域と非シンボル領域とを分け,候補を絞り込ん でからシンボル領域のみで比較を行い判断する.[12]は,RGB減算法,ノイズ除去を行った 後,画素出現頻度により標識の候補を抽出した後に,円形判別,面積比率判別を行い形状を 認識する手法を提案している.これらの手法は高速化が可能であるが,高精度化を実現する ことは困難である.
一方,提案する位置測位システムでは,利用者の僅かな負担増で識別精度を上げるという 目的から,道路標識が画像の中心に撮影されているという考えを利用する.そこで,本論文 ではこのような考えを積極的に利用することで道路標識の高速化・高精度化をする手法を提 案する.本手法では,まず,携帯電話で撮影された道路標識画像を地図サーバが受信する.
地図サーバは受信した画像に撮影されている道路標識の色の特定,ハフ変換による道路標 識の形状の特定,テンプレートマッチングによるシンボルの特定を実行することで道路標識 を識別する.撮影画像の送信ではシステムの実行時間が3秒以内に収まるように利用者が撮 影画像を送る時に画像を低解像度化することによって通信データを削減し,通信時間を抑制 する.道路標識の色の特定ではガウシアン関数を用い,中心に近い画素に重みを付けること で晴天や夕焼け等の背景であっても高精度の識別を可能にする.道路標識の形状の特定では エッジの方向を用いることでハフ変換の高速化を可能にする.このうち円形の道路標識では,
標識が画像の中心に撮影されていることから画像の中央を中心とする極座標上において,一 定の半径に値が集中することを利用する高速化手法を提案する.テンプレートマッチングで は道路標識の色と形状によって候補を絞り込むことによって高速化する.
第1章 序論
1.2 本論文の概要
本論文では既存のインフラ・デバイスを利用したGPS誤差の補正を目的とした位置測位 システムを提案する.また,本システムの最も重要な処理の1つが道路標識の識別であり,
道路標識の識別はシステムのレスポンスと正しい位置測位が必要であるという観点から,高 速化・高精度化が可能な道路標識識別手法を提案する.
本論文は8章で構成される.
第2章「背景」では,歩行者ナビゲーションのためのGPSの誤差範囲や,その原因を考察 する.GPS機能を使わない既存の位置測位手法として既存のICタグを読み取る手法[5]や 利用者が撮影した画像を用いた手法[20] についての利点や問題点を考察する.既存の道路標 識認識手法として,[1],[21],[8]等の学習アルゴリズムを用いた道路標識識別手法や,[4],
[12]等の道路標識識別の高速化を目的とした手法についての利点や問題点を考察する.
第3章「撮影した道路標識画像を用いた現在位置の測位システム」では,提案するGPS 誤差の補正を目的とした位置測位システムについて述べる.本システムは既存のインフラ・
デバイスであるカメラ機能付き携帯電話,GPS,地図サーバによって構成される.本システ ムでは,以下の手順によって位置を測位する.携帯電話によって撮影された道路標識画像と GPSによる位置情報を地図サーバへ送る.地図サーバは,受信した画像から道路標識を識 別する.ユーザの位置は撮影した道路標識が目視できる範囲であるという観点から,受信し たGPS誤差範囲を道路標識の位置や道路標識が目視できる範囲によって絞り込むことで利 用者の位置を測位する.1回の撮影画像で位置を測位できない場合,ユーザに新たな道路標 識の撮影を要求し,前回撮影された道路標識と今回撮影された道路標識の中で位置が最も近 い道路標識を求めることや,新たに絞り込んだ位置と前回までに絞り込んだ位置の論理積を とることで位置を測位する.論理積が空集合となった場合,データを閉じた領域ごとに分割 し,前回データの領域と新たに得た領域との中で最短距離の領域を求めることで位置を測位 する.これにより低コストの位置測位が可能となる.位置測位方法は,道路標識の目視可能 な範囲で絞り込む方式と,道路標識の位置自体で絞り込む方式を提案し,それらの利点や問 題点について考察する.
第4章「位置測位のための道路標識の撮影手法と認識手法」では,本システムの処理のう ち最も重要な処理の1つが道路標識の識別である.道路標識の識別は高速化・高精度化が必 要となる.本手法は利用者の僅かな負担増で識別精度を上げるという目的から道路標識が 画像の中心に撮影されているという考えを積極的に利用することで道路標識の高速化・高精 度化をする.本手法では,まず,携帯電話で撮影された道路標識画像を地図サーバが受信す る.地図サーバは受信した画像に撮影されている道路標識の色の特定,ハフ変換による道路 標識の形状の特定,テンプレートマッチングによるシンボルの特定を実行することで道路標
第1章 序論 識を識別する.撮影画像の送信ではシステムの実行時間が3秒以内に収まるように利用者が 撮影画像を送る時に画像を低解像度化することによって通信データを削減し,通信時間を抑 制する.道路標識の色の特定ではガウシアン関数を用い,中心に近い画素に重みを付けるこ とで晴天や夕焼け等の背景であっても高精度の識別を可能にする.道路標識の形状の特定で はエッジの方向を用いることでハフ変換の高速化を可能にする.このうち円形の道路標識で は,標識が画像の中心に撮影されていることから画像の中央を中心とする極座標上において,
一定の半径に値が集中することを利用する高速化手法を提案する.テンプレートマッチング では道路標識の色と形状によって候補を絞り込むことによって高速化する.
第5章「シミュレーションによる提案手法の評価」では,本位置測位システムの応答時間 を3秒以内に収めるだけの高速性と,青空や暗闇等の環境,撮影された道路標識が画像の中 心でない場合であっても高精度の認識率を得られるかを検証する.
第6章「結論」では,本論文の結論と今後の課題を述べる.
第 2 章
背景
第2章 背景
2.1 本章の概要
本章では本システムの問題点と既存手法の問題点について説明する.2節において提案手 法のシステム構成と問題点について説明する.3節において既存の位置測位手法として,[5],
[20]の手法について説明する.4節において既存の道路標識識別手法として,[8],[12]の手 法について説明する.最後に5節において本章のまとめを行う.
2.2 システム構成と問題点
本システムを構成するに当たり,問題点として以下のものがあげられる.
1. 設置コストの問題
2. 道路標識識別の速度・精度の問題
上記の問題に対し,本論文では,既存のインフラ・デバイスを用いる,道路標識が撮影画 像の中心付近に存在するというシステムの特徴を生かした道路標識識別手法を用いることで 解決する.
2.3 既存の位置測位システム
GPSでは測位できない場所での位置測位手法として,ICタグを読み取る位置測位手法や 利用者が撮影した画像を用いた位置測位手法等が,[5],[20]等で提案されている.
2.3.1 IC タグを読み取る位置測位手法
RFIDは,主に物流で利用されており,商品管理や移動物の監視などで利用されている.し かし,RFIDの活用領域は物流のみに限定されるものではなく,RFIDを用いて歩行者の位 置特定を行う手法も提案されている.[5]では都市内において歩行者の位置と進行方向を高精 度に特定するために,RFIDタグ(以下RFIDとする)を高密度に配置することを提案してい る.ナビゲーションシステムの機器構成を図2.1に示す.ナビゲーション対象エリアに位置 特定基盤としてのRFIDが配置され,利用者はRFIDからの電波を受信する受信機とPDA を携帯する.RFIDから発信される情報はタグIDのみであり,利用者が携帯するPDAは地 理情報データベースを保持している.PDAはまた,受信されたタグIDと地理情報データ ベースを参照することで位置特定や誘導経路の決定を行うとともに,誘導指示(ユーザイン タフェース)を行う.
タグIDをキーとしてRFIDの所在地を格納する地理情報データベースを用意すれば,受 信されたタグIDから所在位置を特定することができる.具体的な方法として,RFIDの配
第2章 背景
図 2.1: ナビゲーションシステム機器構成
置が疎である場合,複数のRFIDからの受信電波の強度情報を活用し3点測量の原理で位置 を特定できる.他の方法として,RFIDを密に配置する場合には,受信機との交信範囲(電 波の到達距離)を狭くすることで,1つのタグIDを受信することが直ちに位置の特定につな がる.例えば,電波の交信範囲が半径10mであるRFIDを20m間隔で設置すれば,受信し たタグIDが表す地点(タグ設置地点)から10m以内の場所に存在することが分かる.この研 究では後者,すなわち高密度にRFIDを配置する方法を前提としている.高密度にRFIDを 配置するならば,利用者の進行方向(行してきた方向)を知ることは容易である.時間的に連 続して受信した2つのタグIDをキーとして用いて地理情報データベース上で移動ベクトル を求めればよい.
実験では被験者はPDAと受信機を携帯し,1)出発地点において,任意の目的地を設定,
2)誘導信号に従い目的地まで歩行,3)目的地到着時にヒアリング調査に回答,という一連
のタスク(トリップ)を,複数回繰り返した.実験時間は1人あたり約1.5時間である.被験
者1人当たりの平均トリップ数は8.7回であり,成功率は表2.1に示す通りである.
実験から,ある程度の精度を持っていることがわかる.問題点としては,タグの設置コス トが大きい,交通状態の影響で受信機との交信範囲が狭くなり,誘導信号が出ない場合があ る,は分岐点でタグIDを受信した場合,その交信範囲を抜けるまで次のタグIDを受信でき ない等が挙げられる.
第2章 背景
表 2.1: 被験者のトリップ数とトリップ成功率
月日 トリップ数 トリップ成功数 OB数 トリップ成功率
11/26 32 26 6 81.3%
11/27 31 26 5 83.9%
11/28 40 37 3 92.5%
11/29 52 43 9 82.7%
11/30 46 41 5 89.1%
合計 201 173 28 86.1%
2.3.2 点字ブロックを使った位置測位手法
[5]では,M-CubITS(M-sequence Multimodal Marker for ITS;エムキュービッツ)を用いた 歩行者ナビゲーションシステムの基礎システムを構築し,実験し,基礎実験において問題と なった点を改良した視覚障害者誘導ブロックを用いたWYSIWYAS(What You See Is What
You Are Suggested) 歩行者ナビゲーションシステムを提案している.
M-CubITSはM系列レーンマーカシステムを発展させたシステムであり,M系列状に0,
1の符号をもつマーカ素子を道路や歩道に設置する.このマーカ阻止をユーザがもつカメラ で読み込み符号列を得,データベースとの比較からM系列上のチップの特定を行い現在位 置を特定する.
M系列におけるチップの特定の原理を説明する.一般に,符号長L= 2m−1チップのM 系列では連続したmチップを観測することにより,符号長内で一意に位置特定が可能とな る.カメラから読み込んだ連続したmチップの符号列をデータベースとしてもっている符号 長Lチップの符号列と比較することで撮影位置を一意に特定することが可能となる.
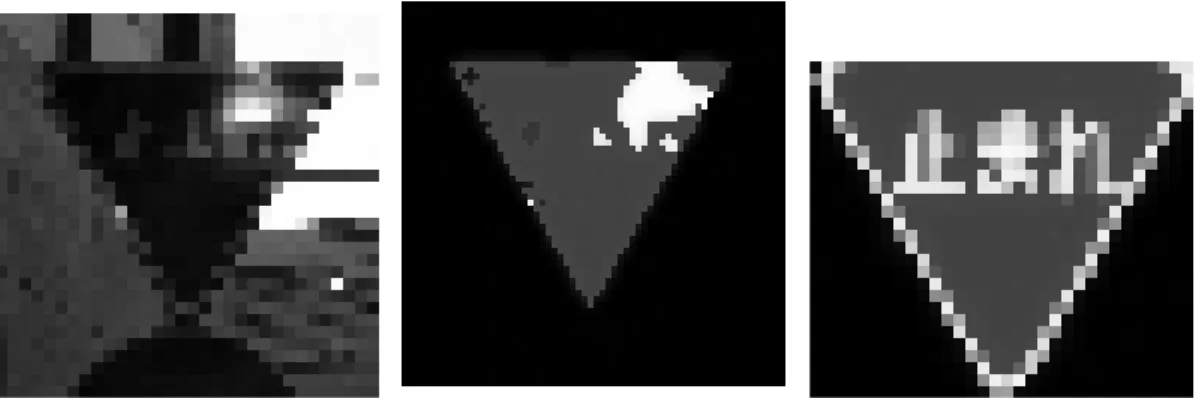
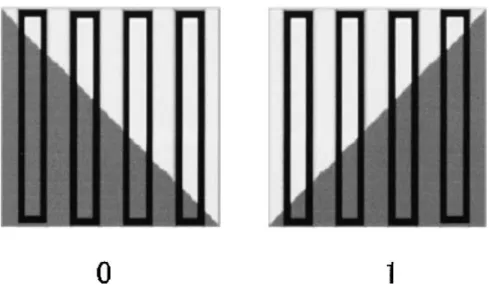
M-CubITSでは2種類のマーカに0,1の情報を与え,色彩や形状により識別を行う.こ
の研究では図2.2に示す青色と黄色の2色の三角形のマーカに0,1の情報を与えM-CubITS 素子として用いている.三角形のマーカ素子を用いることによりM系列の読み込む方向を 撮影画像から得ることができる.
処理の手順は以下の様になる.
1. 特定色の抽出 2. ノイズ除去 3. 探索領域限定 4. 符号列取得 5. 素子形状判定
6. データベースと比較し現在位置を特定
第2章 背景 7. HMI(Human Machine Interface)
実験の結果より,位置測位およびWYSIWYASなナビゲーションの提示を行うことがで きることがわかる.しかし,問題点として,このような目立つ色のマーカ素子は周囲の景観 を損なうため実用的とは言えない.この問題は,図2.3の様に,視覚障害者誘導ブロックを
M-CubITS素子として用いることで解決している.
しかし,この手法には,人が多い場所ではM-CubITS素子が人の影に隠れてしまい撮影で きない,2色の色の付いた視覚障害者誘導ブロックを新たに導入しなくてはならない,広域 での位置測位を行いたい場合,多くのM-CubITS素子を読み込む必要があり,それに伴いノ イズも大きくなる等の問題を抱えており,屋外での実用化は難しいと考えられる.
これらの問題から,本論文では,既存のインフラ・デバイスのみで位置測位を行うことが できる手法を提案した.
2.4 既存の道路標識認識手法
これまでに,様々な道路標識識別手法が研究されている.[1],[21],[8]等では学習アルゴ リズムを用いた道路標識識別手法が提案されている.[4],[12]等では高速化を目的とした手 法が提案されている.本節ではこれらの手法の特徴と問題点を検証する.
2.4.1 学習アルゴリズムを用いた道路標識識別手法
[8]では,低品質画像の認識に適した学習法の検討を行っている.この手法は,原画像から 学習画像を自動生成するもので,学習画像の生成過程において,現実の劣化・変形特性を反 映した生成を行っている.それにより認識率の向上を図るとともに,学習画像の収集を行う 手間が省け,学習過程が効率化される.この学習法では,劣化および変形を種々の要因に分 離しモデル化して,各要因毎のパラメータの設定により生成を行っている.撮影画像からそ の劣化特性を得るため遺伝的アルゴリズムによってパラメータ分布の推定を行い,生成過程 に利用している.認識は部分空間法を用い,学習過程においてこの生成型学習法を用いてい る.実際の道路標識の認識実験により,高精度の識別率を得ている.
この手法の問題点としては,識別に学習アルゴリズムを用いていることによる速度の低下,
識別する道路標識の種類の増加に対し,データ量が大きく増加する等が挙げられる.
2.4.2 高速化を目的とした道路標識識別手法
一般に,道路カラー画像に撮影されている被写体のうち,対象としている標識部分は1割 以下の部分しか占めておらず,それ以外は不要な画像領域であるといえる.また,道路標識 には赤,青,黄及び背景である白の4色しか使用されていない.[12]では,これらのことを
第2章 背景
図 2.2: M-CubITS素子
図 2.3: 視覚障害者誘導ブロックを用いたM-CubITS素子
第2章 背景 利用することで道路標識の識別を高速化している.この手法では,入力となる道路カラー画 像から道路標識に使用されている色(特定色)を判別した後,その分布状況によって抽出処理 の対象領域を限定することにより,処理時間の大幅な削減を図っている.更に,抽出領域に 占める特定色の面積比率を利用することにより,抽出精度の向上と更なる処理時間の短縮を 図っている.53枚の道路カラー画像を用いた評価実験の結果,94.7%の抽出率と約2.18秒 の平均処理時間となっている.
この手法の問題点としては,雨天時等では晴天時に比べて道路標識識別の精度が下がるこ とが挙げられる.
本論文では道路標識が撮影画像の中心付近に存在するというシステムの特徴を生かした道 路標識識別手法を用いることで,これらの問題を解決する.
2.5 本章のまとめ
本章では本システムの問題点と既存手法の問題点について説明した.2節において提案手 法の問題点として,設置コストの問題,道路標識識別の速度・精度の問題を挙げ,それに伴 うシステム構成について述べた.3節において既存の位置測位手法として,[5],[20]の手法 について説明し,その問題点を挙げた.4節において既存の道路標識識別手法として,[8],
[12]の手法について説明し,その問題点を挙げた.
第 3 章
撮影した道路標識画像を用いた現在位置の
測位システム
第3章 撮影した道路標識画像を用いた現在位置の測位システム
3.1 本章の概要
本章では撮影した道路標識画像を用いた現在位置の測位システムの位置測位手法について 説明する.2節において提案手法の特徴について説明する.3節において提案アルゴリズム の詳細として,道路標識の目視可能範囲による位置測位手法と道路標識の位置による位置測 位手法について説明する.4節において道路標識を色・形状まで識別した場合と,シンボル まで識別した場合との位置測位にかかる速度,位置測位精度の比較について説明する.最後 に5節において本章のまとめを行う.
3.2 提案手法の特徴
ユーザの位置は撮影した道路標識が目視できる範囲であるという観点を利用した位置測位 が提案手法の特徴である.本システムは既存のインフラ・デバイスであるカメラ機能付き携 帯電話,GPS,地図サーバによって構成される.これにより低コストの位置測位が可能とな る.本システムでは,以下の手順によって位置を測位する.携帯電話によって撮影された道 路標識画像とGPSによる位置情報を地図サーバへ送る.地図サーバは,受信した画像から 道路標識を識別する.ユーザの位置は撮影した道路標識が目視できる範囲であるという観点 から,受信したGPS誤差範囲を道路標識の位置や道路標識が目視できる範囲によって絞り 込むことで利用者の位置を測位する.
3.3 提案アルゴリズムの詳細
本システムは撮影された道路標識を利用することで位置測位する.1回の撮影画像で位置 を測位できない場合,ユーザに新たな道路標識の撮影を要求し,前回撮影された道路標識と 今回撮影された道路標識の中で位置が最も近い道路標識を求めることや,新たに絞り込んだ 位置と前回までに絞り込んだ位置の論理積をとることで位置を測位する.論理積が空集合と なった場合,データを閉じた領域ごとに分割し,前回データの領域と新たに得た領域との中 で最短距離の領域を求めることで位置を測位する.位置測位方法は,道路標識の目視可能な 範囲で絞り込む方式と,道路標識の位置自体で絞り込む方式を提案する.
3.3.1 道路標識の目視可能範囲による位置測位手法
現在のGPSはマルチパス等の影響によって都市部等での位置測位精度が低下する.本シ ステムは,道路標識の撮影画像とGPSの位置情報から,ユーザの位置範囲を得る[17],[6].
システムの全体のフローは図3.1となる.本システムは携帯電話,GPS,地図サーバによっ
第3章 撮影した道路標識画像を用いた現在位置の測位システム て構成される.地図サーバは道路標識の識別機能,現在位置の測位機能を備えている.
道路標識の位置から現在位置を測位するフローは図3.2となる.本稿では利用者が撮影さ れた道路標識が目視できる位置に存在しているという観点からGPS誤差範囲をその道路標 識が目視できる範囲によって絞り込むことで位置を測位する.ユーザは携帯電話で取得した 道路標識の撮影画像とGPS情報を地図サーバへ送る.地図サーバは撮影された道路標識を 識別し,GPSの誤差範囲をその道路標識が存在する場所によって絞り込み,測位した位置を ユーザへ返す.
1回の撮影で位置を絞り込めない場合,測位した位置を前回データとし,サーバは前回デー タと新たな道路標識の撮影要求をユーザに送る.前回データはユーザが存在する可能性のあ
る位置を1,存在する可能性の無い位置を0とするマップで構成される.測位した位置は閉
じた領域で表現されることが多く,前回データは連続性の高い0と1のマップであり,容量 を小さくすることができるので,通信量に及ぼす影響は少ない.ユーザは前回データと新た な道路標識の撮影要求を受信すると,新たに道路標識を撮影し,撮影画像と前回データを地 図サーバへ送る.地図サーバは新たに受信した道路標識の撮影画像に対しても,GPSの誤差 範囲をその目視可能位置によって絞込み,新たに測位した位置情報と前回データの位置情報 との論理積をとり,ユーザの位置を絞り込む(図3.5).
ユーザが撮影のために移動したため,新たに測位した位置情報と前回データの位置情報と の論理積が空集合となる場合がある.この場合,図3.3のフローによって位置を測位する.新 たな道路標識画像で絞込んだ位置に複数の閉じた領域が存在する場合,その位置を閉じた領 域ごとに分割する.前回データの位置に対しても閉じた領域ごとに分割する.ユーザは新た な領域と前回の領域との中,領域間の距離が最も近い領域間を移動したという観点から,新 たな領域と前回の領域との領域間の距離が最も近い領域を検出し,その領域で,ユーザの移 動後の領域である新たな領域の方をユーザの現在位置とする(図3.4).
3.3.2 道路標識の位置による位置測位手法
道路標識の位置によって位置測位が可能な条件は,GPSの誤差範囲内に撮影された道路標 識と同じものが1つのみ存在することである(図4.3).GPSの誤差範囲内に撮影された道路 標識と同じものが2つ以上存在する場合,ユーザがそれらの標識の中で,どの標識の位置に 存在するかを特定することは不可能である(図3.7).
このため,本システムでは1回の撮影で位置測位ができない場合,複数の撮影画像を利用 する事によって,ユーザの位置を測位する.
1回の道路標識の撮影によってユーザの位置測位が可能な条件はGPS誤差範囲内に存在す る道路標識中,撮影された道路標識と同じシンボル,色・形状,枚数等の組み合わせの道路 標識がただ1つのみ存在する場合である.
第3章 撮影した道路標識画像を用いた現在位置の測位システム
携帯電話 取得画像データ
地図サーバ
道路標識 DB
道路標識認識
現在位置測位 GPSデータ
道路標識 位置DB
位置測位可能
出力画像作成 地図DB
前回データ が存在
データマージ Yes No
前回データ
検索結果 パケット化 Yes No
図 3.1: システムの流れ
第3章 撮影した道路標識画像を用いた現在位置の測位システム
GPS誤差マップG(t)作成
道路標識データ
道路標識目視可能 範囲マップS(t)作成 GPSデータ
前回データ
位置マップM(t) = G(t)∧S(t)
出力マップO(t) = M(t)∧O(t-1)
図 3.2: 現在位置の測位手法
GPS誤差マップG(t)作成
道路標識データ
道路標識目視可能 範囲マップS(t)作成 GPSデータ
前回データ
位置マップM(t) = G(t)∧S(t)
M(t)を繋がっていない領域 m(t,i)(i=1,2,…,領域数)に分割
出力マップO(t) =
{m(t,i) | min(距離(m(t,i), m(t-1,j))) (i:tにおける領域数,j:t-1における領域数)}
図 3.3: 論理積が空集合となってしまった場合の測位手法
第3章 撮影した道路標識画像を用いた現在位置の測位システム
(a)
(b)
(c)
図 3.4: 複数枚の撮影画像を用いた場合の測位手法((a)1回目の入力,(b)2回目の入力,(c) 出力)
第3章 撮影した道路標識画像を用いた現在位置の測位システム
(a)
(b)
(c)
図 3.5: ユーザが撮影のために移動ことで論理積が空集合となってしまった場合の測位手法 ((a)1回目の入力,(b)2回目の入力,(c)出力)
第3章 撮影した道路標識画像を用いた現在位置の測位システム
図 3.6: 道路標識の位置による位置測位の例(GPSの誤差範囲内に同一の道路標識が複数無 い場合)
2回の道路標識の撮影によるユーザの位置測位が可能な条件は1回目に撮影された道路標 識の組み合わせと同じ道路標識から一定距離内に存在する道路標識中,2回目に撮影された 道路標識と同じシンボル,色・形状,枚数等の組み合わせの道路標識がただ1つのみ存在す る場合である.
3.4 道路標識を色・形状まで識別した場合と,シンボルまで識別 した場合との位置測位にかかる速度,位置測位精度の比較
位置測位を目的とした道路標識識別の場合,撮影された道路標識と同一の色・形状の道路 標識がGPSの誤差範囲内にただ1つのみ存在すれば,道路標識のシンボルまで識別できな くとも位置測位が可能である.このように,撮影された道路標識対してシンボルまで識別せ ず,色・形状のみを識別する場合,道路標識識別の識別率や識別までに要する時間等の面で 有利になる.
しかし,1回の撮影でユーザの位置を測位できず,複数の道路標識画像を用いる場合,ユー ザに,前回までに撮影された道路標識と異なった色・形状の道路標識を撮影してもらう必要 がある.道路標識には図3.8のようにユーザによっては異なった色として認識してしまう道 路標識も存在し,そのような道路標識に対してユーザが誤った判断をした場合,位置測位の
第3章 撮影した道路標識画像を用いた現在位置の測位システム
図 3.7: 道路標識の位置による位置測位の例(GPSの誤差範囲内に同一の道路標識が複数あ る場合)
精度が低下する恐れがある.形状のみの識別では,道路標識の分類が三角形,逆三角形,四 角形,円形の4種類のみになってしまい,GPSの誤差範囲内やユーザが撮影のために歩く一 定範囲内にただ1つのみの道路標識を見つけることが困難になる.
提案した道路標識識別手法の実験結果は撮影された道路標識の形状を正しく識別できた割
合は100%,画像を受信してから標識の形状を識別するまでの実行時間は47[ms],38種類の
テンプレートを用いた時のテンプレートマッチングの結果,撮影された道路標識のシンボル を正しく識別した割合は95.7%,画像を受信してからテンプレートマッチングによって標識 のシンボルを識別するまでの時間は87[ms] であり,シンボルまで識別した場合でも,識別 制度.識別速度の両面で大きく劣化する事は無い.
上記の理由から,道路標識はシンボルまで識別する方が望ましい.
3.5 本章のまとめ
本章では撮影した道路標識画像を用いた現在位置の測位システムの位置測位手法について 説明した.2節において提案手法の特徴について説明した.3節において提案アルゴリズム の詳細として,道路標識の目視可能範囲による位置測位手法と道路標識の位置による位置測 位手法について説明した.4節において道路標識を色・形状まで識別した場合と,シンボル
第3章 撮影した道路標識画像を用いた現在位置の測位システム
図 3.8: 色の判断が困難な道路標識の例
まで識別した場合との位置測位にかかる速度,位置測位精度の比較について説明し,道路標 識を色・形状まで識別した場合と,シンボルまで識別した場合との識別速度の差はシステム の応答時間に対して小さいので,シンボルまで識別した方が本システムに適していることを 説明した.
第 4 章
位置測位のための道路標識の撮影手法と認
識手法
第4章 位置測位のための道路標識の撮影手法と認識手法
4.1 本章の概要
本章では位置測位のための道路標識の撮影手法と認識手法について説明する.2節におい て提案手法の目的について説明する.3節において提案手法のアルゴリズムの内容について 説明する.提案手法のアルゴリズムは,サーバが受信した画像の拡大処理,RGB画像から
Y,Cr,Cb画像への変換処理,色の強さの算出,エッジ抽出,ハフ変換,θ方向における画
素値合計の最大位置を検出,ρ方向における画素値の合計の分布を算出,特定の形状の認識,
標識のシンボルの特定,標識の位置の特定,画像の3値化,テンプレートマッチングの手順 によって道路標識を識別する.最後に4節において本章のまとめを行う.
4.2 提案手法の目的
本システムの処理のうち最も重要な処理の1つが道路標識の識別である.道路標識の識別 は高速化・高精度化が必要となる.提案する位置測位システムでは,利用者の僅かな負担増 で識別精度を上げるという目的から,道路標識が画像の中心に撮影されているという考えを 利用する.そこで,本論文ではこのような考えを積極的に利用することで道路標識の高速化・
高精度化をする手法を提案する.
4.3 提案手法のアルゴリズムの内容
本システムの最も重要な処理の1つが道路標識の識別である.道路方式の識別によって撮 影された道路標識の画像から道路標識の種類を特定する.道路標識の識別には高速化・高精 度化が要求される.提案する位置測位システムでは利用者の僅かな負担増で識別精度を上げ るという目的から道路標識が画像の中心に撮影されているという考えを利用する.本稿では このような考えを利用して道路標識の識別を高速化・高精度化する手法を提案する.道路標 識識別のフローは図4.1となる.
4.3.1 サーバが受信した画像の拡大処理
通信量の削減から,携帯端末は地図サーバへ撮影画像を送信する際,画像を32×32に低解像 度化させてから送信する.32×32のjpeg画像の通信時間はFOMAの通信速度が384[kbps][24]
であることを考えると,通信時間は高々32×32×16[bit]/384[kbps] = 42.7[ms]程度となる.
地図サーバが受信した画像は低解像度であり,その状態でエッジ抽出すると誤差が大きくな る.そこで,受信した画像に対してBi-Cubicアルゴリズムを使い拡大処理し,エッジ抽出の 誤差を減らす(図4.2).
第4章 位置測位のための道路標識の撮影手法と認識手法
画像拡大
RGB画像から Y,Cr,Cb画像に変換
色の強さの算出
エッジ抽出
ハフ変換
θ方向での画素値合計 の最大位置を検出 取得画像データ
ρ方向での画素値の 合計の分布を算出
道路標識の位置を特定
道路標識の形状を特定
道路標識の シンボルの識別
図 4.1: 道路標識認識手法
第4章 位置測位のための道路標識の撮影手法と認識手法
(a) (b)
図 4.2: Bi-Cubicアルゴリズムによる拡大処理 ((a)元画像,(b)拡大処理結果)
4.3.2 RGB 画像から Y , Cr , Cb 画像への変換処理
道路標識は主に白,赤,青の色から構成される.道路標識の識別には白,赤,青の画素に 対して高い値をとるY,Cr,Cb画像を用いる.RGB画像からY,Cr,Cb画像への変換式 は以下で表される.
Y = 0.299×R+ 0.587×G+ 0.114×B Cr = 0.713×(R−Y)
Cb= 0.564×(B−Y) (4.1)
4.3.3 色の強さの算出
Cr,Cb画像から撮影画像の色の強さを算出する.道路標識が画像の中心付近にあることを 利用し,中心に近い画素に重みをつけることで道路標識の色特定を高精度化する.道路標識 の赤,青の色の強さPi(i=Cr, Cb)は色差画像の画素値fi(x, y)とガウシアン関数G(x, y)(図 4.3)とを掛け合わせたものを合計することで算出する.Piを以下の式で導出する.
G(x, y) = exp (
− x2+y2 2.0×σ2
)
Pi =∑
y
∑
x
fi(x, y)×G(x− width
2 , y− height 2 ) i=Cr, Cb
(4.2) 道路標識の色はPCr,PCbの値の大きさを比較することで特定する.
第4章 位置測位のための道路標識の撮影手法と認識手法
図 4.3: ガウシアンフィルタの例[22]
(a) (b)
図 4.4: Canny edge detectionによる円形道路標識画像のエッジ抽出((a)元画像,(b)エッジ 抽出結果)
4.3.4 エッジ抽出
低解像度でのY画像はノイズが多く正確にエッジ抽出できない.Cr,Cb画像は,Y画像 と比較してデータ量が少ないがノイズも少ないので低解像度の画像ではY画像よりも,正確 にエッジを抽出できる.本手法ではCr,Cbの2つの画像に対してCanny edge detection[10]
によってエッジ抽出する(図4.4).
4.3.5 ハフ変換
ハフ変換[19]は円形の形状と直線の形状に対して別空間で認識する必要があり低速である.
本稿ではエッジの方向を利用することで,円形の形状と直線の形状を同一極座標空間上で認 識し,ハフ変換を高速化する.
第4章 位置測位のための道路標識の撮影手法と認識手法
xy空間での直線は極座標で形式では次式で表現される.
ρ=xcosθ+ysinθ (4.3)
ハフ変換は1画素に対して,このθを動かす必要がある.本論文ではマスクを用いることで 画素の角度θを求め,1画素から1つの角度を求めることで高速化する.マスクmaskx(x, y),
masky(x, y)は以下の式となる.
e(x, y) = 1 σ2 exp
(
−x2+y2 2.0×σ2
)
maskx(x, y) =−x×e(x, y)
masky(x, y) =−y×e(x, y) (4.4)
f(x, y)でのエッジの強さGx,Gy,角度θは以下の式となる.
Gx =∑ ∑
f(x, y)×maskx(x, y) Gy =∑ ∑
f(x, y)×masky(x, y) c= tan−1(Gy/Gx) (0 ≤c≤π) θx,y =
{
c+π (xcosc+ysinc <0)
c (otherwise) (4.5)
xy座標の原点は画像の中心にする(図4.7).
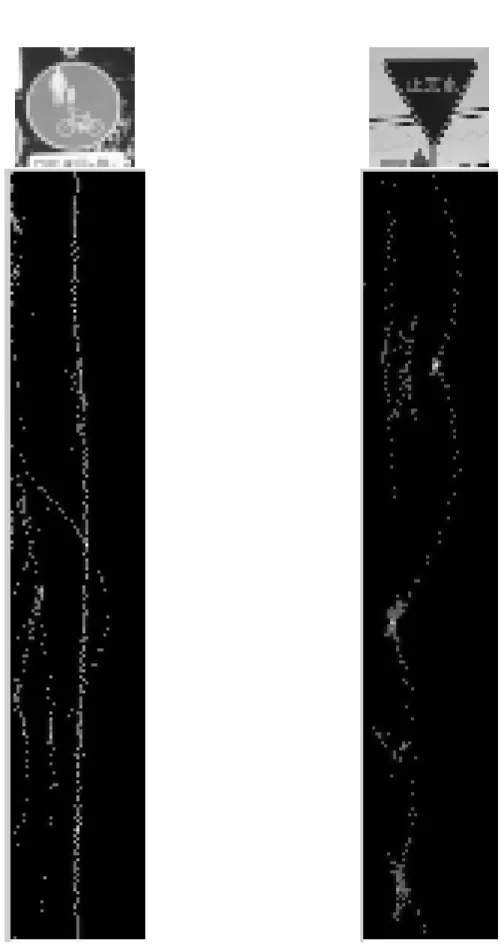
円形の道路標識を認識する場合,道路標識が画像の中心付近に存在することを利用する.
画像の中心に存在する円形はf(ρ=const, θ)に画素値が集中するので,極座標平面状ではθ 軸に平行な直線として現れる.これを利用し,円形の形状を抽出する(図4.6(a)).三角形等,
直線で構成される道路標識は特定のf(ρ, θ)に画素値が集中する.このことを利用し,極座 標から道路標識の形状を抽出する(図4.6(b)).
4.3.6 θ 方向における画素値合計の最大位置を検出
円形の道路標識の場合,高い画素値がθ軸に平行な直線として現れるのでθ方向における 画素値合計の最大位置を検出し,形状,位置を特定する.円形のエッジはf(ρ=const, θ)に 画素値が集中するので,A(ρ) = ∑
θf(ρ, θ)の値が高くなるρが存在する.形状が円形であ り,内側に円形の模様が存在する道路標識の場合,標識の内側のρでもA(ρ)の値が高くな ることがある.本手法では模様のエッジに反応しないために,B(ρ) =ρ×A(ρ)とすること で模様によって得られるエッジよりも道路標識の淵によって得られるエッジに重みを置く.
標識は人が撮影するため正確に中心に位置されているとは限らないので,周りの画素も考慮
第4章 位置測位のための道路標識の撮影手法と認識手法
(a)
(b)
図 4.5: マスクの例 (a)maskx,(b)masky,半径=4,σ = 7.5
第4章 位置測位のための道路標識の撮影手法と認識手法
図 4.6: 道路標識のハフ変換結果 ((a)円形の道路標識,(b)逆三角形の道路標識)
第4章 位置測位のための道路標識の撮影手法と認識手法 し,以下の式からθ方向における画素値合計S(ρ)の最大値Smaxをとるρを検出する.
S(ρ) =
∑mr k
B(ρ+k)
=
∑mr k
(ρ+k)×∑
θ
f(ρ+k, θ) (4.6)
Smax = max
ρ S(ρ) (4.7)
mrは考慮する周りの画素の範囲とする.
4.3.7 ρ 方向における画素値の合計の分布を算出
三角形等,直線で構成される道路標識は特定のρ,θでの画素値の強さを表す以下の式に よって形状を特定する.
T(ρ, θ) =
∑mr k
f(ρ+k, θ) (4.8)
T(ρ, θ)の分布を解析することで直線で構成される道路標識の形状を求める.
4.3.8 特定の形状の認識
円形の道路標識の場合,Smaxをとるρ付近に画素値が一定密度で分布する.直線で構成さ れる道路標識の場合,特定のf(ρ, θ)に画素値が集中する.
円形の道路標識の場合,Smaxをとるρを半径rとすることで標識の半径を得る.撮影画像 は道路標識が正確に中央に存在しているとは限らないので,中央からのズレをxgap, ygapと し,以下の式で補正する.
ρc =r−xgapcos(θ)−ygapsin(θ) (4.9) 円形の形状は中心(xgap, ygap),半径rの円であり,0≤θ <2πに対して均一なf(ρc, θ)の値を とる.f(ρc, θ)の値が均一に分布していない画像の場合,画像中に円形が存在しないとみな すことができる.円形度は以下の式で表す.
C(ρc) =
∑
θf(ρc, θ)
maxθ(f(ρc, θ)) (4.10)
∑
θf(ρc, θ)から,円形の形状を構成する画素の合計値を求め,maxθ(f(ρc, θ))から,値の分 布の均一性を求める.これらの割合から画像中に円形が存在しているかを判断する.
直線で構成される道路標識のひとつである逆三角形の道路標識は画素の値が,θ = 12π,76π,116π に集中するので,逆三角形度は以下の式となる.
L=
∑2
n=0T (
ρt,12π+ 23π×n)
∑
θ
∑
ρf(ρ, θ)) (4.11)
第4章 位置測位のための道路標識の撮影手法と認識手法 ρtはT(ρ, θ =const)が最大となるρの値を表す.全画素値の合計に対する特定位置での画素 値の合計の割合を求めることで,特定の直線を構成する画素の割合を求め,画像中に逆三角 形が存在しているかを判断する.
4.3.9 標識のシンボルの特定
標識の手順でシンボルを識別する.
1. 標識の位置の特定 2. 画像の3値化
3. テンプレートマッチング
テンプレートには[25]の道路標識画像を利用した.
4.3.10 標識の位置の特定
撮影画像には,標識ではない部分も含まれているので標識の位置を特定し,標識以外の部 分をフィルタリング対象とすることで,テンプレートマッチングの高精度化を実現する.道 路標識の左端,上端,右端,下端を求め,道路標識をこの枠内に収める.
円形の道路標識は中心(xgap, ygap),半径rの円となるので,以下の式で枠の位置を特定する.
lef t=xgap−r top=ygap−r right=xgap+r
bottom=ygap+r (4.12)
直線で構成される道路標識のひとつである逆三角形の道路標識は,形状を以下の式で表す ことができる.
ρ0 =y ρ1 =xcos(7
6π) +ysin(7 6π) ρ2 =xcos(11
6 π) +ysin(11
6 π) (4.13)
第4章 位置測位のための道路標識の撮影手法と認識手法
図 4.7: 道路標識画像のフィルタリング それぞれの直線の交点から,枠の位置を特定する.
lef t=− (√
3 2
)−1(
ρ1+ ρ0 2
)
top=ρ0 right=
(√ 3 2
)−1(
ρ2+ ρ0 2
)
bottom=−(ρ1+ρ2) (4.14)
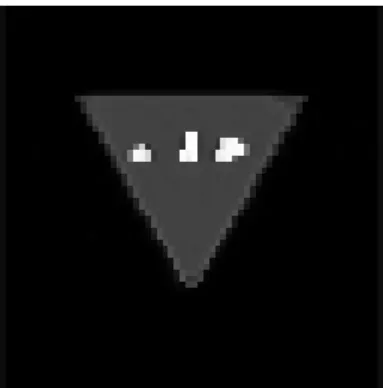
4.3.11 画像の 3 値化
道路標識は主に赤,青,白の色で構成されているため,撮影画像をこの3色に減色させる.
撮影画像の周囲の環境の影響を小さくするために,道路標識の位置と形状でフィルタリング する(図4.7).
輝度の低い画素で,ヒストグラムの値が最も高い位置を,テンプレートの赤,青の位置に 合わせる.輝度の高い白色の画素が多い道路標識に対して,その画素を赤,青の位置に合わ せてしまうことを避けるため,輝度の高い画素は無視する.
暗い場所で撮影された画像等は,画像の輝度が低く,暗い色の標識と誤認識しやすい.ヒ ストグラムを一定割合高い値にシフトすることで,白色など輝度の高いシンボルの認識を可 能にする(図4.8).
ヒストグラム変換を行った後,画素値を赤,青,白の中で最も近い画素値にし,3値に減 色する(図4.9).
4.3.12 テンプレートマッチング
特定した道路標識の位置に誤差が含まれている可能性があるので,特定した道路標識位置 とその位置を上下左右に一定量シフトした位置で.テンプレートマッチングする.
第4章 位置測位のための道路標識の撮影手法と認識手法
図 4.8: ヒストグラム変換の実行結果
図 4.9: 道路標識画像の3値化処理結果
第4章 位置測位のための道路標識の撮影手法と認識手法
4.4 本章のまとめ
本章では位置測位のための道路標識の撮影手法と認識手法について説明した.2節におい て提案手法の目的について説明した.3節において提案手法のアルゴリズムの内容として,
サーバが受信した画像の拡大処理,RGB画像からY,Cr,Cb画像への変換処理,色の強さ の算出,エッジ抽出,ハフ変換,θ方向における画素値合計の最大位置を検出,ρ方向にお ける画素値の合計の分布を算出,特定の形状の認識,標識のシンボルの特定,標識の位置の 特定,画像の3値化,テンプレートマッチングを説明し,高速化・高精度化が可能であるこ とを説明した.
第 5 章
シミュレーションによる提案手法の評価
第5章 シミュレーションによる提案手法の評価
5.1 本章の概要
本章ではシミュレーションによって提案手法を評価する.2節において位置測位システム のシミュレーション実験の条件を述べる.3節において位置測位システムのシミュレーション 結果を述べ,結果について考察する.4節において道路標識識別アルゴリズムのシミュレー ション実験の条件を述べる.5節において道路標識識別アルゴリズムのシミュレーション結 果を述べ,結果について考察する.6節において道路標識識別アルゴリズムにおける既存手 法と提案手法の比較し,提案手法の優位性について検証する.最後に7節において本章のま とめを行う.
5.2 位置測位システムのシミュレーション実験の条件
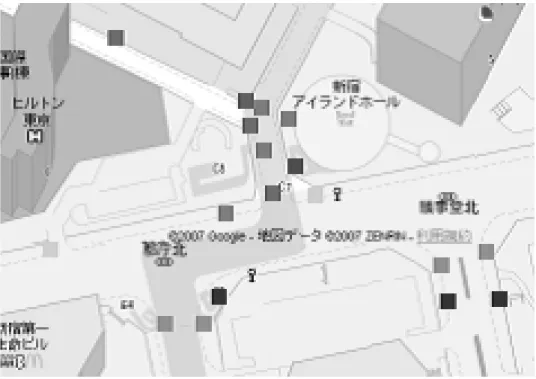
GPSの誤差範囲を100[m],ユーザが2回目の撮影のために歩く距離を最大10[m]として,
新宿西口付近の道路標識分布(図5.1)での位置測位の精度について実験した.
5.3 位置測位システムのシミュレーション結果
1回の道路標識の撮影によるユーザの位置測位の精度はGPS誤差範囲内に存在する道路標 識中,シンボル,色・形状,枚数等の組み合わせがただ1つのみ存在する道路標識の割合で 求めた.
2回の道路標識の撮影によるユーザの位置測位の精度はGPS誤差範囲内に存在する道路標 識中,シンボル,色・形状,枚数等の組み合わせがただ1つのみ存在する道路標識を1,そ うでない場合,1回目に撮影された道路標識の組み合わせと同じ道路標識から一定距離内に 存在する道路標識中,シンボル,色・形状,枚数等の組み合わせがただ1つのみ存在する道 路標識の割合を求め,これらの合計をGPSの誤差範囲内に存在する道路標識中で割った値 で求めた.
位置測位の精度の式は以下の様になる.
1. 1回の道路標識の撮影によるユーザの位置測位の精度.
P =
∑U
i=0ai
U ×100[%]
ai = {
1 if(ai ̸=aj(i̸=j,0≤j < N))
0 otherwise (5.1)
第5章 シミュレーションによる提案手法の評価
図 5.1: 新宿西口付近の道路標識分布
第5章 シミュレーションによる提案手法の評価
2. 2回の道路標識の撮影によるユーザの位置測位の精度.
P =
∑N
i=0p(i)
N ×100[%]
p(i) = {
1 if(ai ̸=aj(i̸=j,0≤j < N)) q(ai) otherwise
q(a) =
∑Ma
k=0bak
Ma (5.2)
bak = {
1 if(bak ̸=bas(ak ̸=as,0≤as < M)) 0 otherwise
ここで,NはGPS誤差範囲内の道路標識の数,aiはGPS誤差範囲内の道路標識のシンボル,
色・形状,枚数等の組み合わせ,Maは1回目に撮影された道路標識の組み合わせと同じ道 路標識から一定距離内にある道路標識の数.bakは1回目に撮影された道路標識の組み合わ せと同じ道路標識から一定距離内にある道路標識のシンボル,色・形状,枚数等の組み合わ せを表す.
結果を表5.1,表5.2,表5.3に表す.
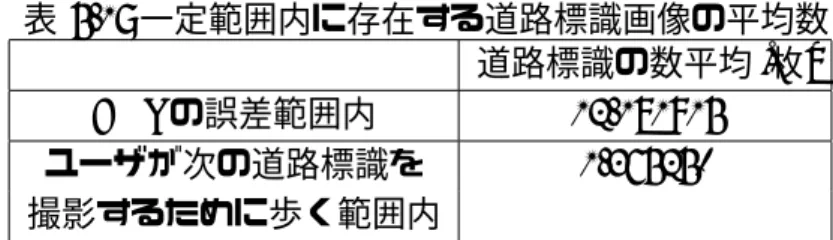
この結果から,GPSの誤差範囲内には道路標識の数は12.181915[枚]であり,ユーザの位 置を測位するには位置の候補を絞り込みきれないことがわかる.1回の撮影による位置測位 の確率は22.432975[%]である.
ユーザが次の道路標識を撮影するために歩く範囲内の道路標識の平均数は1.365250[枚]で あり,位置を特定できる1に近いが,2回の撮影による位置測位の確率は61.037555[%]程度 となった.図5.2,図5.3から,同一の道路標識が付近に存在している場合がほとんどであり,
一定範囲内に道路標識が全く無い,もしくは同じ標識が2つ以上あるという場合がほとんど で,結果的に道路標識の平均数が1.365250[枚]になったと考えられる.
3章で道路標識のシンボルまで識別することの必要性を述べたが,比較のため道路標識の シンボルまで識別した場合と,道路標識の色・形状のみ識別した場合とで位置測位の確率を 算出した.実験の結果,提案手法による撮影された道路標識識別の正答率を考慮した場合の 道路標識画像による位置測位の確率でも,シンボルまで識別する方が良い結果となっている ことがわかる.撮影された道路標識を識別するまでの時間は,色・形状のみ場合は47[ms]で あり,シンボルまで識別した場合は87[ms]であるので,速度の面では若干の不利があるも
のの,表5.2,表5.3の結果を見る限り,位置測位の方が重要な問題であると考えられる.
2回撮影した場合でも,位置測位の精度は61.037555[%]程度であり,道路標識のみで位置 測位を行うことは困難であることがわかる.道路標識による位置測位の精度を上げるには,
付近にある同一の道路標識を区別する手法の確立が必要であると考えられる.
第5章 シミュレーションによる提案手法の評価
図 5.2: 同一の道路標識が付近に存在している例(1)
図 5.3: 同一の道路標識が付近に存在している例(2)
第5章 シミュレーションによる提案手法の評価
表 5.1: 一定範囲内に存在する道路標識画像の平均数 道路標識の数平均[枚]
GPSの誤差範囲内 12.181915 ユーザが次の道路標識を 1.365250 撮影するために歩く範囲内
表 5.2: 道路標識画像による位置測位の確率 シンボル[%] 色・形状[%]
1回の撮影による 22.432975 14.479667 位置測位の確率
2回の撮影による 61.037555 50.241197 位置測位の確率
一定範囲内に1回に
撮影された道路標識と 19.630339 19.193012 異なる道路標識が
存在しない確率
5.4 道路標識識別アルゴリズムのシミュレーション実験の条件
47枚の撮影画像に対して,本手法の有効性をPentium 4 2.66GHzの環境で検証した.撮 影画像は道路標識が画像の中央付近に存在する,画素数32×32のjpeg画像を使用した.テ ンプレートマッチングのテンプレートは[25]の道路標識画像38枚を使用した.
5.5 道路標識識別アルゴリズムのシミュレーション結果
撮影された道路標識の形状を正しく識別できた割合は100%,画像を受信してから標識 の形状を識別するまでの実行時間は47[ms]であった38種類のテンプレートを用いた時の テンプレートマッチングの結果,撮影された道路標識のシンボルを正しく識別した割合は
95.7%であった.画像を受信してからテンプレートマッチングによって標識のシンボルを識
別するまでの時間は87[ms]であった.受信する画像は32×32画素のjpeg画像であり,高々 32×32×16[bit] = 16384[bit]程度の通信量なので,FOMAの通信速度が384[kbps][24]であ ることを考えると通信時間は42.7[ms]であり3秒以内に利用者に結果を返すことは可能であ ると考えられる.
本手法を用いることで低解像度の道路標識の識別において38種類のテンプレートを用い た場合でも高精度の認識率を得ることができた.道路標識識別の実行結果は図5.4,図5.5,
図5.6となる.晴天の環境での道路標識であっても,正しく識別できる(図5.4).暗闇の環境
第5章 シミュレーションによる提案手法の評価
表 5.3: 提案手法による撮影された道路標識識別の正答率を考慮した道路標識画像による位 置測位の確率
シンボル[%] 色・形状[%]
(シンボル識別率 (色・形状識別率
95.7[%]) 100[%]) 1回の撮影による 21.4683571 14.479667
位置測位の確率
2回の撮影による 58.4129401 50.241197 位置測位の確率
図 5.4: 晴天の環境においても道路標識の識別に成功している例(左から入力画像,画像処理 結果,識別したテンプレート)
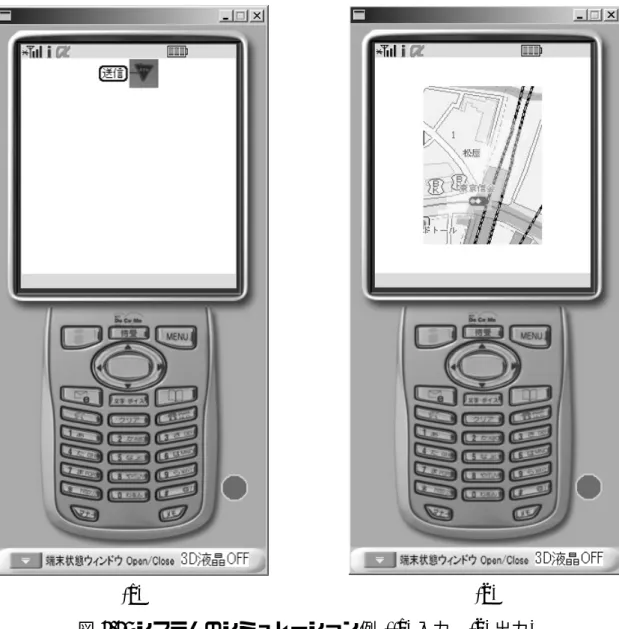
においても正しく道路標識の識別できる(図5.5).道路標識の中心と撮影画像の中央との誤 差が大きい画像においても正しく道路標識の識別できる(図5.6).Doja-3.5によるシステム 全体の動作結果は図5.7となる.
5.6 道路標識識別アルゴリズムにおける既存手法と提案手法の 比較
これまでに提案されている手法と比較すると,[4](Pentium 4 2.2GHz)は処理時間が100[ms],
識別精度93.3%,[12](Mobile Pentium MMX 166MHz)は処理時間が2.18[s],識別精度94.7%
第5章 シミュレーションによる提案手法の評価
図 5.5: 暗闇の環境においても赤色の道路標識の識別に成功している例(左から入力画像,画 像処理結果,識別したテンプレート)
図 5.6: 道路標識の中心と撮影画像の中央との誤差が大きい画像において道路標識の識別に 成功している例 (左から入力画像,画像処理結果,識別したテンプレート)
第5章 シミュレーションによる提案手法の評価
(a) (b)
図 5.7: システムのシミュレーション例((a)入力,(b)出力)
第5章 シミュレーションによる提案手法の評価 であり,同等以上の処理速度,識別精度を得ることができた.
5.7 本章のまとめ
本章ではシミュレーションによって提案手法を評価した.2節において位置測位システム のシミュレーション実験の実験条件を述べた.3節において新宿西口付近の道路標識分布(図 5.1)での位置測位システムのシミュレーション結果から,道路標識の識別速度よりも位置測 位の精度の方が問題であり,シンボルまで識別した方が本システムに適していることを説明 した.4節において道路標識識別アルゴリズムのシミュレーション実験の実験条件を述べた.
5節において道路標識識別アルゴリズムのシミュレーション結果から,提案した道路標識識 別手法は本システムに適用するのに十分な高速性と高精度性を得ることが可能なことを説明 した.6節において道路標識識別アルゴリズムにおける既存手法と提案手法の比較し,高速 性・高精度性において,提案手法の方が既存手法に比べて本システムに対して優位であるこ とを確認した.
![図 4.3: ガウシアンフィルタの例 [22]](https://thumb-ap.123doks.com/thumbv2/123deta/9785915.1869166/30.892.163.781.147.389/図43ガウシアンフィルタの例22.webp)