1 目次 1 第 1 章 序論 2 1.1 背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2 1.2 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3 第 2 章 振動発電デバイスの最適形状に関する研究 4 2.1 振動発電 PZT デバイス・・・・・・・・・・・・・・・・・・・・・・・・・ 4 2.2 無負荷状態と負荷状態のはじき実験の応答比較・・・・・・・・・・・・・・ 6 2.3 三角(平等強さ)と四角(一様断面)のはじきと重りつり下げ実験・・・・・・・・ 9 2.3.1 はじき実験による出力特性の考察・・・・・・・・・・・・・・・・・・・ 9 2.3.2 重りつり下げ実験による出力特性の考察・・・・・・・・・・・・・・・・ 11 2.4 最適形状の応力解析・・・・・・・・・・・・・・・・・・・・・・・・・・ 13 2.4.1 三角と四角の理論によっての応力分析・・・・・・・・・・・・・・・・ 13 2.4.2 歪みケージによる三角と四角の応力分析・・・・・・・・・・・・・・・・ 18 2.5 インピーダンス整合・・・・・・・・・・・・・・・・・・・・・・・・・・ 23 2.6 効率測定実験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 26 2.6.1 効率測定理論式の導出・・・・・・・・・・・・・・・・・・・・・・・ 26 2.6.2 発電特性の考察・・・・・・・・・・・・・・・・・・・・・・・・・・ 30 2.7 PZT 素子を上側と下側に貼り付けた場合の比較・・・・・・・・・・・・・・ 36 第 3 章 振動発電デバイスの配線方式に関する研究 40 3.1 両面の PZT デバイスの考察・・・・・・・・・・・・・・・・・・・・・・・ 40 3.2 配線方式に関する考察・・・・・・・・・・・・・・・・・・・・・・・・・ 44 3.3 単体とデバイスの比較・・・・・・・・・・・・・・・・・・・・・・・・・ 54 3.4 試作した PZT デバイスとの比較・・・・・・・・・・・・・・・・・・・・・ 58 3.5 厚さが違う PZT 単体の比較・・・・・・・・・・・・・・・・・・・・・・・ 64 第 4 章 まとめ 68 参考文献 70 発表論文 72
2
第 1 章 序論
1.1 背景
近年、人々の環境保護に対する意識が高まっており、これに伴い、CO2の排出基準も厳 しくなってきている。一方で、電力供給に対するニーズが日に日に増えつつあり、人々の 需要に追いつかない状況にある。現在、世界各国は環境に優しい新エネルギー技術につい て開発を進めている。地球温暖化防止のため、先進国は今の50%以上の CO2削減を目標と して全力で取り組んでおり、日本国内は2050 年までに CO2排出の60%~80%を削減するこ とを目指している。 2011 年の東日本大震災以降、日本国内の原発が全部停止したりし、環境発電技術の応用 が特に社会に注目されている。エネルギーハーベスティング技術(環境発電)を利用して発電 する場合には、CO2を排出しないので、今後は光、熱、振動、電波などの可再生エネルギ ーの応用が広がると期待されている。環境発電技術の中では、太陽光発電と風力発電は振 動発電より実用化水準が高く、技術も成熟し、幅広く応用されている。振動エネルギーは 自然界中に、どこにでも存在している。風力発電と地熱発電に比べて振動発電の応用範囲 はより広範囲である。その結果、エネルギー危機とともに今後、振動発電は一層重視され ると考えられる。これまでも多くの振動発電デバイスが応用されている。今まで最も実用 性に富む振動発電デバイスは圧電素子と電子誘導の原理に基づき、試作されている。 振動発電は、発電の原理によって、圧電式(ピエゾ)、電子誘導式と静電式の 3 種類に分か れている。本研究は圧電式の発電方式を用いている。圧電式はたくさんの利点がある。圧 電式は材料が振動によって変形するので、発生した電位差を電力として回収する。振動発 電の対象には振動は数Hz という人の動きから、建物の振動のような数十 Hz から 100Hz までの領域、車の振動や工場の振動などのような 1000Hz に達する領域に応用できる。エ ネルギー危機がもっと進むにつれ、振動発電技術は更に注目されるだろう。研究の進みに 伴って、将来、振動発電製品が人々の生活の中に応用されると考えられる。近年では、LED やモータ、ワイヤレス通信機器などに低消費電力化機器が導入されている。振動発電低消 費電力デバイスに対するセルフパワード技術、すなわちバッテリーによる電源供給ではな く、ハーネス不要で分散した発電供給技術の要求も強く、振動発電デバイスによるエネル ギー回生技術が望まれる。3
1.2 目的
本研究の目的は、振動エネルギーを電気エネルギーに変換できる高効率で高出力な発電 デバイスを開発することである。本論文では、圧電素子を用いた発電デバイスの最適形状 と配線方式に関する検討を行う。本研究はピエゾ(Piezoelectric Element)式の素子を圧電素 子として形状が違う(主に三角と四角)アルミ板に貼り付け、形状が違う PZT デバイスの発 電特性試験を行って応力解析し、発電特性を比較する。実測データに基づき、入力エネル ギーから変換される熱エネルギーと発電エネルギーの関係を検討し、回生可能なエネルギ ー量の定量解析を行ってエネルギー変換効率を評価する。そして、効率を高めるためにア ルミ板の両面ともにPZT 素子を貼り付け、二個の素子の配線方式を電圧と電力など多角度 から検討した。最後に、板全体にPZT 素子を貼り付けた場合の PZT 単体の発電特性を考察 し、多種類PZT 単体の出力を比較した。 本研究において、微小振動からの小型高効率エネルギー回生システムの開発については 主に二つの課題がある。(Ⅰ)、現段階では発電エネルギーが少ない、効率も低い。PZT デバイスの形状を変換し、出力エネルギーと効率を高め、最適な形状を探る。(Ⅱ)、PZT デバイスに対し、一面より両面のデバイスは出力特性が良いと考えられる。両面の場合、 どんな方式で接続するか、配線の方法も検討する一つの課題である。(Ⅰ)の課題として、 今まで実験で使われていたPZT デバイスは四角形状のものである。本研究では、三角形状 の PZT デバイスを試作し、出力特性を四角と比較して優れた形状のデバイスを確認する。 (Ⅱ)の課題として、最適な形状を確定した上で、両面ともにPZT 素子を貼り付けた際に、 どのように二つの素子を接続すれば、出力特性がよくなるのかを検討する。直列、並列と 別々の3 種類の方法で抵抗を接続し、実験を行う。論文の最後に新しく製作した PZT 単体 の出力特性を考察する。この前に使われていたPZT 単体の出力データを確認し、新型単体 との特性比較にも重点を置く。 本論文の構成は以下のようになる。2 章で試作した三角と四角の PZT デバイスのインピ ーダンス整合実験と効率測定実験を行い、結果について解析する。3 章で両面 PZT デバイ スの直列、並列と別々の配線方式で発電特性を比較する。 以上から、PZT デバイスの最適な形状、両面の最適配線方式と新製の PZT 単体出力特性 を検討し、4 章で本論文のまとめを述べる。4
第 2 章
振動発電デバイスの最適形状に関する研究
2.1 振動発電 PZT デバイス
PZT(チタン酸ジルコン酸鉛)とは、圧電セラミックスの一種であり、圧電性をもつ代表的 な圧電体のセラミックスである。圧電素子というのは別名ピエゾ素子とも呼ばれ、叩いた り、圧力をかけたり、温度が変化すると電圧を生じ(電気的な分極が生じる)、逆に電圧を かけるとそのものが伸縮する性質がある。実例として発電床、無電池ワイヤレス通信設備な どがある[1]。 巨大な誘誘電率および圧電性、強誘電性をもち、原料が比較的安価なため大量生産する ことができ、比較的分極を引き起こしやすいために好感度、電気結合係数が大きい。圧電 素子に関していくつかの型がありそれぞれに特徴を有している。圧電材料のプレートが一 枚のユニモルフ、プレートが二枚のバイモルフ、プレートが多数重ねられている積層型な どの型がある。使用した PZT 圧電デバイスはすべてバイモルフ型であるが、電界に対し変 位が大きいという長所を持つ。一方で、耐久性に欠け、発電エネルギーが小さいという短 所が存在する。耐久性という点に関しては PZT 圧電デバイスプレートの間にアルミ板を入 れるなどして改善している。圧電性が大きいためにアクチュエータやセンサ、圧電素子と して使われることが多い。 図2.1 に示すのは、試作した形状が異なる二つの PZT デバイスである。本章で述べる内 容はこの二つのPZT デバイスを片持ちはり状にして実験を行った。本実験中に用いた PZT デバイスは市販品ではなく、共同研究により試作したPZT 素子対し、アルミ板に貼り付け たPZT デバイスである。利用したアルミ板の厚さは 0.3mm である。 図 2.1 から分かるように、同じ長さと幅の三角と四角形状の二つのアルミ板の上に同じ PZT 素子を貼り付けている。三角の PZT デバイスでは、理論解析ではどこでも同一の応力 を受けるため、PZT 素子を図のように貼り付けた。四角の PZT デバイスでは、クランプ部 に近づくほど、応力が大きい。従って、四角形状のデバイスでは、PZT 素子をできるだけ クランプ部に近づけて貼り付けた。𝜎
𝑚𝑎𝑥=
𝑀 𝑍= −
6𝑊𝑥 𝑏ℎ2(1)
式(1)により、論理的には三角の PZT デバイスはどこでも応力が同じであるが、四角形 状ではクランプ部が最大となる。5 図 2.1 試作された実験用 PZT デバイス 表2.1 PZT デバイスの規格 単位:mm
a
59
b
30
c
10
表 2.2 PZT 素子の仕様 メーカー 厚さ[mm] 縦[mm] 横[mm] 株 式 会 社 ス ラ イ ブ 0.1 25 12d
a
b
c
6
2.2 無負荷状態と負荷状態のはじき実験の応答比較
本節では、前節で示した四角のPZT デバイスを利用し、この PZT デバイスの無負荷状 態と負荷状態ではじき実験を行う。本実験の目的は、同一の入力変位最大値と同一のクラ ンプ条件で無負荷状態と負荷状態の時に圧電素子の応答を比較することである。 実験の方法について示す。PZT デバイスをクランプして固定し、その先端の変位量をレ ーザー変位計で変位量を測定する。レーザー変位計が射す自由端をフラップ棒を使って初 期位置から0.3mm の最大変位を与え、PZT を押し込むことで加える。そして、フラップ棒 を引き抜いてやることによってPZT デバイスの自由端を振動させ、電圧出力を発生させる。 この実験では、負荷状態で選択した抵抗は200 kΩとした。データを DSP に取得し、解析 した。この実験をPZT に負荷抵抗を付けた場合と負荷抵抗をつけない場合で検討する。計 測値は自由端変位とPZT 出力電圧である。 図 2.2 無負荷と負荷の変位比較 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 Time[s] di st an ce [m m ] 無負荷 負 荷 1.150 1.16 1.17 1.18 1.19 1.2 1.21 1.22 1.23 1.24 1.25 0.05 0.1 0.15 0.2 0.25 0.3 Time[s] di st an ce [m m ] 無負荷 負 荷
7 図 2.3 無負荷と負荷の電圧比較 図2.2 と図 2.3 はそれぞれ PZT デバイスに対し、無負荷状態と負荷状態に 0.3mm のステ ップ入力を加えた場合の応答波形である。図2.2 が示しているのは PZT デバイス自由端の 変位応答波形、図2.3 が示しているのは PZT 素子の出力電圧応答波形である。 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -5 -4 -3 -2 -1 0 1 Time[s] v o lt a ge [v ] 無負荷 負荷 1.16 1.17 1.18 1.19 1.2 1.21 1.22 1.23 1.24 1.25 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 Time[s] vo lt ag e [v ] 無負荷 負荷
8 図2.4 速度と加速度と電圧の比較 図2.4 に示しているのは振動させた自由端の速度と加速度と電圧の波形である。以上の応 答波形から、無負荷状態と負荷状態の最大速度は180m/s であることがわかった。最大加速 度の比較では、負荷状態と無負荷状態の最大加速度は325km/𝑚2であり、同じ最大加速度を 確認した。無負荷状態の最大出力電圧は4.8V に対し、負荷状態の最大電圧は 4V にすぎな い。 1.185 1.19 1.195 1.2 1.205 1.21 1.215 1.22 1.225 1.23 -250 -200 -150 -100 -50 0 50 Time [s] V el [ m /s ] 1.185 1.19 1.195 1.2 1.205 1.21 1.215 1.22 1.225 1.23 -5 0 5x 10 5 Time [s] A cc [m /s /s ] 1.185 1.19 1.195 1.2 1.205 1.21 1.215 1.22 1.225 1.23 -5 -4 -3 -2 -1 0 Time [s] P Z T V o lt a g e [V ]
無負荷
負荷
9
2.3 三角(平等強さ)と四角(一様断面)のはじきと重りつり下げ実験
2.3.1 はじき実験による出力特性の考察 図2.5 実験概要 本節では2.1 節で紹介した二種類の試作した PZT デバイスを使い、はじき実験を行い、 電圧応答を解析を比較する。まずはは同一の入力変位で三角(平等強さ)と四角(一様断面)の PZT デバイスの電圧出力特性を比較する。実験では前節の実験と同じ構成し、抵抗は 10K Ωを選択した。フラップ棒を用いることで入力変位は3mm としている。計測値は PZT 素 子の出力電圧と自由端変位である。実験の概略図は図2.5 に示されている。 図 2.6 変位と電圧の応答波形 2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4 -4 -3 -2 -1 0 1 2 Time [s] D is ta nce [ m m ] 2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 Time [s] V ol ta ge [V ] 平等強さ 一様断面10 図2.7 変位と電圧の放大後波形 図 2.6 と図 2.7 に示しているのは同じ抵抗と変位という条件で三角(平等強さ)と四角(一様 断面)の自由端変位と PZT 素子出力電圧の波形図である。同一の抵抗値と最大入力変位で二 つのPZT 素子を比較すれば、三角(平等強さ)の行き過ぎ量は 1mm に比べて四角(一様断面) の行き過ぎ量は0.5mm に止まる。また、以上の図から、三角(平等強さ)の PZT デバイスは 四角(一様断面)より最大電圧出力が小さい(三角 2.2V,四角 1.2V)から、発電量が大きく なるということを確認した。 2.7 2.72 2.74 2.76 2.78 2.8 2.82 2.84 2.86 2.88 2.9 -4 -3 -2 -1 0 1 2 Time [s] D is ta nce [ m m ] 2.7 2.72 2.74 2.76 2.78 2.8 2.82 2.84 2.86 2.88 2.9 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 Time [s] V o lt a g e [V ] 平等強さ 一様断面
11 2.3.2 重りつり下げ実験による出力特性の考察 図2.8 重りつり下げ実験 重りつり下げ実験の構造は図 2.8 のように示している。PZT デバイスに負荷抵抗を繋いで クランプする。PZT デバイスの自由端に錘を糸で吊るし、その自由端の正上方から変位計 レーザーをあて、自由端の変位を計測する。この重り実験と前節のはじき実験との異なる 場所は初期変位を与える方法である。はじき実験ではラップ棒で、重りつり下げ実験は重 りで初期変位を与える。そして、吊り下げたままでライターを使って糸を切ることによっ て、PZT デバイスを振動させ、電圧が発生する。 この実験では、二つのPZT デバイスに 10kΩの抵抗を繋ぎ、30g の重りをつり下げ、自 由端変位とPZT 出力電圧を計測する。図 2.9 と図 2.10 に示しているのは自由端変位と電圧 の波形図である。二つの図からわかるように同じ加重した場合、三角の自由端変位は四角 より大きい、三角の最大変位は3.0mm と比べ、四角は 2.3mm であり、三角が四角のおよ そ1.3 倍になる。最大出力電圧には、三角は 1.72V であり、四角は 1.70V であるというこ
12 とがわかった。同じ負荷抵抗と重りの場合、二つのPZT デバイスの最大出力電圧と電力は ほぼ同じだと考えられる。 図2.9 三角と四角の自由端変位 図2.10 三角と四角の出力電圧 3.8 3.85 3.9 3.95 4 4.05 4.1 4.15 4.2 4.25 4.3 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 Time [s] Di s ta nce [m m ] 一様断面(四角) 平等強さ (三角) 3.8 3.85 3.9 3.95 4 4.05 4.1 4.15 4.2 4.25 4.3 -1.5 -1 -0.5 0 0.5 1 1.5 2 Time [s] V ol ta ge [V ]
13
2.4 最適形状の応力解析
本節では、三角形(平等強さ)と四角形(一様断面)の応力解析を行う。まずは三角と四角の 論理的な応力解析を行って比較する。次にひずみケージによって実験を行った上で、二つ の形状の片持ちはりの応力解析を確認する。 2.4.1 三角と四角の理論によっての応力分析
M:曲げモーメント P:先端への集中荷重 l:貼りの長さ 𝑏𝑙:はりの幅 h0:はりの厚さ x:荷重からの距離 図2.11 四角形のはり まずは三角形と四角形の片持ちはりの理論解析を検討する。図2.11 に示しているように 自由端に集中荷重P が荷重しているときに荷重点から距離 x における断面の曲げモーメン トM は
M = −Px
(2) となる14 断面の二次モーメント
I =
𝑏𝑙ℎ03 12(3) この断面での最大曲げ応力
σ=
𝑀 𝐼×
ℎ0 2= ∓
6𝑃𝑥 𝑏ℎ02(4) 四角のはりに対しては、x が一番大きい固定端において、応力が一番大きいということが わかった。 また、固定端の最大曲げ応力は
σ
max=
b6Pl lh02(5) はりの断面の幅𝑏𝑙が変化せず、一定のため、四角形状はりのとき、一様断面になる。 そして、断面二次モーメントをはりのたわみの基礎式に代入すると
𝑑2𝑦 𝑑𝑥2
= −
𝑀 𝐸𝐼=
𝑃𝑥 𝐸𝐼(6) と表示される。 上式を積分して下式になる。 𝑑𝑦 𝑑𝑥
=
𝑃 2𝐸𝐼𝑥
2+ 𝐶
(7) はりの固定端、つまりx=l のところでたわみ角は 0 であるから、x=l で dy/dx=0 よりC=−
Pl
22EI
(8) 𝑑𝑦 𝑑𝑥
=
𝑃 2𝐸𝐼(𝑥
2− 𝑙
2)
(9) 上式を積分してy=
𝑃 2𝐸𝐼(
1 3𝑥
3− 𝑙
2𝑥) + 𝐶
1(10) となる。固定端はたわみ0 であるから、x=l で y=0 を上式に代入して
𝐶
1=
𝑃𝑙3 3𝐸𝐼(11) となる。よって、たわみの式は
y =
𝑃 6𝐸𝐼(𝑥
3− 3𝑙
2𝑥 + 2𝑙
3)
(12) となる。最大のたわみ角および最大たわみは、ともにx=0 のところで起こり15
(
𝑑𝑦 𝑑𝑥)
𝑚𝑎𝑥= (
𝑑𝑦 𝑑𝑥)
𝑥=0= −
𝑃𝑙2 2𝐸𝐼(13)
𝑦
𝑚𝑎𝑥= 𝑦
𝑥=0=
𝑃𝑙3 3𝐸𝐼(14) と導かれる。最大応力が等しい一様断面の片持ちはりの単位面積当たりの弾性エネルギー は
U =
12𝑃𝑦
𝑚𝑎𝑥1𝑣=
12𝑃
𝑃𝑙3𝐸3𝑏12 0ℎ02 1 𝑏0ℎ0𝑙=
𝜎2 18𝐸(15) となる。 図2.12 三角形のはり
16 次に三角形状のはりの応力を検討する。断面の応力は四角と同じように
σ=
𝑀 𝐼×
ℎ0 2= ∓
6𝑃𝑥 𝑏ℎ02(16) 上式から、三角に対して x/b は自由端から固定端までどこでも一定だから、たわみ曲線の 曲率も一定であることがわかった。 三角形状のはりを図 2.12 に示す。荷重端から距離 x の端面における端面二次モーメント I は
I =
𝑏ℎ03 12(17) 固定端の二次モーメントは
𝐼
0=
𝑏0ℎ03 12(18) となる。ここでb/𝑏0=x/l であるため、
I=
𝑏ℎ3 12= 𝑏
0 𝑥 𝑙 ℎ3 12=
𝑥 𝑙𝐼
0(19) と表示される。たわみ曲線方程式は 𝑑2𝑦 𝑑𝑥2
= −
𝑀 𝐸𝐼=
𝑃𝑥 𝐸𝐼=
𝑃𝑙 𝐸𝐼0= 𝐶
(20) と導かれる。C は定数である。 上式を積分して 𝑑𝑦 𝑑𝑥= 𝐶𝑥 + 𝐶
1(21) となる。そして、もう一回積分して
y =
1 2𝐶𝑥
2+ 𝐶
1𝑥 + 𝐶
2(22) と表示できる。x=l でdydx=0、y = 0になるため、
Cl + 𝐶
1= 0
(23)17 1 2
𝐶𝑙
2+ 𝐶
1𝑙 + 𝐶
2= 0
(24) 以上から𝐶
1= − C 𝑙 , 𝐶
2=
1 2C 𝑙
2(25) となる。だから 𝑑𝑦 𝑑𝑥
= Cx − C 𝑙
(26)y =
1 2C𝑥
2− C 𝑙x +
1 2C 𝑙
2(27) となる。ここで
C =
Pl EI0(28) である。荷重端のたわみ角は
(
𝑑𝑦𝑑𝑥)
𝑥=0= − C 𝑙 = −
𝑃𝑙𝐸𝐼2 0(29) と表示される。荷重端のたわみは
(y)
𝑥=0=
12C 𝑙
2=
𝑃𝑙3 2𝐸𝐼0(30) となる。 材料に外力を加えて変形させると、外力も材料の変形に伴って移動するため、外力は材 料に対して仕事をしたことになる。この外力による仕事は、材料の変形に伴い、材料内に ひずみエネルギーとして蓄える。本実験では、はりの変形が弾性変形の範囲内であるため、 外力を除くと吸収したエネルギーを全て放出する。このような場合のひずみエネルギーを 弾性エネルギーという。 長方形断面で厚さℎの一定な平等強さの片持ちはりに集中荷重 P が自由端に加わる。最大 たわみがy0である場合、単位面積当たりの弾性エネルギーを以下の式に示す。
U =
1 2𝑃𝑦
0 1 𝑉=
1 2𝑃
𝑃𝑙3 2𝐸 12 𝑏0ℎ02 2 𝑏0ℎ0𝑙=
𝜎2 6𝐸(31) 形状における比較を表 2.3 にまとめた。従って、以下の結論が得られた。(1)、四角と三 角形状のはりを比較し、耐久性が同一としたら、同一荷重に対して三角の自由端のたわみ 角が四角の 2 倍となり、たわみにおいては三角が四角の 1.5 倍になる。(2)、三角のはりは 四角に比べて面積が半分になってコストが下げられる。(3)、三角はりの単位体積当たり の弾性エネルギーは四角の 3 倍で、弾性エネルギーが 1.5 倍になることがわかった。後節で
18 は、実験を行い、四角と三角の PZT デバイスの発電効率を検討する。 表 2.3 長方形と三角形の比較 特性値 形状 たわみ たわみ角 (弾性エネルギ ー)/(体積) 体積 長方形状 (一様断面) 𝑊𝑙3 3𝐸𝐼 𝑊𝑙2 2𝐸𝐼 𝜎2 18𝐸 𝑏0ℎ0𝑙 三角形状 (平等強さ) 𝑊𝑙3 2𝐸𝐼0 𝑊𝑙2 𝐸𝐼0 𝜎2 6𝐸 𝑏0ℎ0𝑙 2 (平等強さ)/ (一様断面) 3 2 2 3 1 2 2.4.2 歪みケージによる三角と四角の応力解析 本小節では、歪みケージを利用して三角形状と四角形状表面の応力を解析する。まずは、 歪みケージの使用方法について示す。図 2.13 に示しているように、片持ちはりの表面に一 枚の歪みケージを貼り付けて一端を固定する。一端に荷重 P を加える場合、歪みケージ接 着箇所の表面応力σは
σ = ε ∙ E
(32) 歪みεの計算式は𝜀
0=
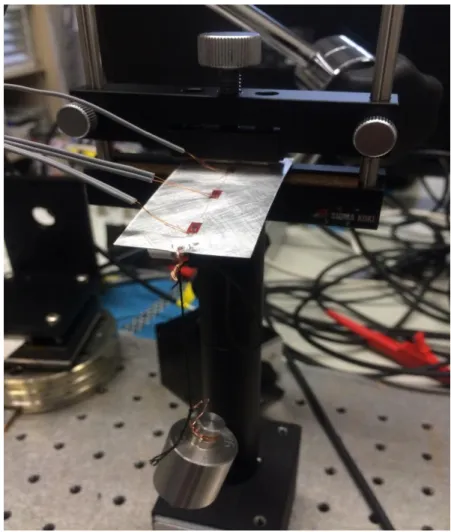
𝐸𝑏ℎ6𝑃𝑥2(33) ここでは、b:はりの幅、h:はりの厚み、𝑥:荷重点から歪みゲージ中心までの距離である。 実験方法は重りつり下げ実験と同様である。計測値は先端から距離 1.2cm(先端),2.8cm(中 心),4.5cm(クランプ部)に貼り付けるひずみゲージで計測した歪量である。重りの重さがそれ ぞれ 50g,100g,150g を吊るし、キーエンスロガーで計測する。実験構成を図 2.14 に示す。 図2.13 歪みケージの利用
19
図2.14 実験構成図(一様断面)
20 図 2.16 応力と荷重の特性 図 2.15 と図 2.16 に示されているのは四角形状片持ちはりの応力解析である。図 2.15 に同 じ加重の場合、応力と自由端からのを示す距離の関係が示されている。この図からわかる ように、自由端からの距離が大きくなるにつれて応力も増大する。つまり、固定端の応力 が一番大きいということを確認した。図 2.16 は、自由端からの距離を一定にして応力と荷 重の関係を示している。
𝜎
𝑚𝑎𝑥=
𝑀 𝑍= −
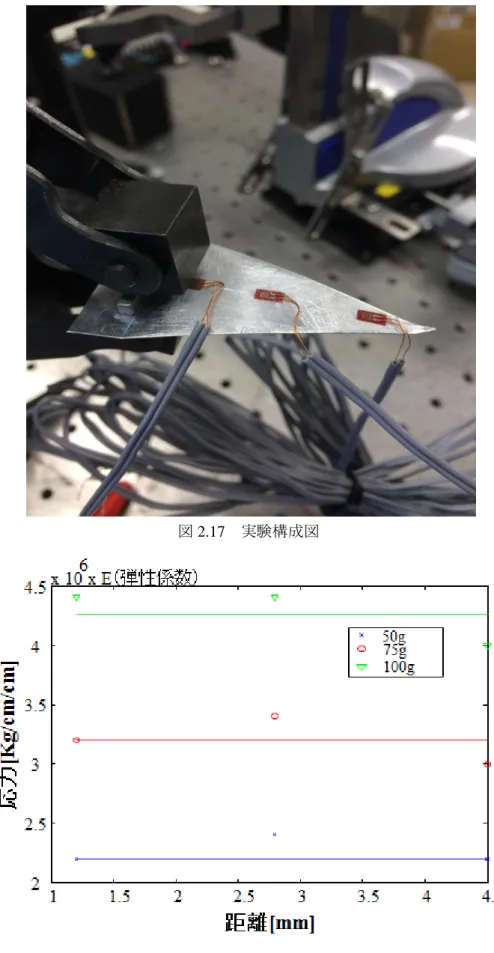
6𝑃𝑥 𝑏ℎ2(34) 上式によって、自由端に近づくほど、応力が小さくなる。以上から、自由端の発電量も 一番少ないということが推測できる。従って、四角の PZT デバイスは三角より発電効率が 低い傾向があると考えられる。 次に三角形状のはりの応力解析実験を行う。実験の条件と方法は四角と同様である。計 測値は先端から距離 1.2cm(先端),2.8cm(中心),4.5cm(クランプ部)に貼り付けるひずみゲージ で計測した歪量である。三角形の先端が大変柔らかいので、壊れないように、錘の重量を それぞれ 50g,75g,100g に減らし、キーエンスロガーで計測する。実験構成を図 2.17 に示す。
21
図 2.17 実験構成図
22 図 2.19 応力と荷重の特性 図 2.18 と図 2.19 に示されているのは三角形状片持ちはりの応力解析である。図 2.18 に、 応力と距離の関係を示す。この図からわかるように、自由端からの距離が大きくなるにつ れて応力が変わらなくて一定になっている。つまり、三角の片持ちはりはどこでも応力が 一定であると言える。図 2.19 は、自由端からの距離を一定にして応力と荷重の関係を示し ている。
𝜎 =
𝑀𝑍= −
6𝑊𝑥𝑏ℎ2 (35) 上式によって、自由端から固定端までどこでも応力が一定である。四角と比べて、三角 応力が四角の固定端と同じであることがわかった。以上から、三角の発電量は四角より増 加するはずだと考えられる。従って、三角の PZT デバイスは四角より発電効率が高い傾向 があると考えられる。23 e-6
2.5 インピーダンス整合
本節では、三角と四角形状の PZT デバイスに対し、インピーダンス整合実験を行う。PZT デバイスの最大の出力特性(出力エネルギー、出力パワー、出力電圧、効率など)を引き 出すため、負荷整合実験を行い、PZT デバイスに接続負荷抵抗値を変化させながら、エネ ルギーと電力がどのように変化するのかを検証した。 次に実験の構成について説明する。実験方法は前節で述べたはじき実験の方法と同じよ うにフラップ棒を用いることで入力変位は3mm となっている。計測値は PZT 素子の出力 電圧と自由端変位である。まずは三角のPZT デバイスに 1,2,3,4,5,6 kΩの抵抗を接続して 実験を行い、抵抗の変化で出力エネルギーと出力電圧が変化するという特性を確認する。 四角のPZT デバイスも同じように 8,9,10,11,12,13 kΩの抵抗を接続して実験を行う。 図 2.20 に示しているのは出力エネルギーと抵抗の関係である。横軸は抵抗値であり、縦 軸は出力エネルギーを示す。三角の出力エネルギーと抵抗の関係より負荷抵抗値が 4 kΩの ときに三角のPZT デバイスの出力エネルギーが最大となる。同様に、赤い線は四角 PZT デ バイスに対しては、負荷抵抗が10 kΩのときに出力エネルギーが最大となるということが わかった。 図 2.20 抵抗変化に対するエネルギー特性 0 2 4 6 8 10 12 14 1 1.5 2 2.5 3 3.5 4 4.5 5 Impedance [kΩ] O u tp u t E n e rg y [J ] 三角 四角 三角 四角24 e-3 図 2.21 に示しているのは出力パワーと抵抗の関係である。三角の出力パワーと抵抗の関 係により負荷抵抗値が 2kΩのときに三角の PZT デバイスの出力パワーが最大となる。同様 に、赤い線は四角PZT デバイスに対しては、負荷抵抗が 10 kΩのときに出力パワーが最大 となるということがわかった。 図 2.21 抵抗変化に対するパワー特性 図 2.22 三角と四角の電圧 PSD 波形図 0 2 4 6 8 10 12 14 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 Impedance [kΩ] O u tp u t P o w er [W ] 四角 三角 0 50 100 150 200 250 300 350 400 450 500 -100 -50 0 50 Frequency P o w er S p ect rum M a g ni tud e (d B ) 三角 四角 三角 四角 e-3
25 以上から分かるように、四角形状の PZT デバイスはエネルギー特性における整合抵抗と パワー特性における整合抵抗が同一であることを確認した。しかしながら、三角形状の PZT デバイスには、エネルギー整合抵抗とパワー整合抵抗が異なるという結果が現れている。 以下では、この結果について考察する。 図 2.22 に三角と四角形状の PZT デバイスの電圧 PSD 波形図を示す。この図から明らかな ように青い線の三角 PZT デバイスの波形図が二つのピークが出ている。つまり、三角形状 PZT デバイスが 185Hz と 372Hz という二つの共振周波数がある。同様に四角の psd 波形図 に示している四角形状の PZT デバイスの共振周波数は 104Hz だけである。これから実験結 果による理論値の導出と実験検証を行う。 (1)、最大パワーPmaxの得られた負荷抵抗 実験値より ZP =2 kΩ 372 Hz (出力電力最大) (2)、PZT の等価容量𝐶𝑃𝑍𝑇の導出
2 kΩ=
1 𝜔𝐶𝑃𝑍𝑇=
1 2𝜋372𝐻𝑧∗𝐶𝑃𝑍𝑇(36)
𝐶
𝑃𝑍𝑇=
1 2𝜋372𝐻𝑧∗2kΩ= 214𝑛𝐹 (37)
(3)、エネルギー最大となる負荷抵抗 ZWの導出𝑍
𝑊=
1 2𝜋𝑓𝑚𝑎𝑥𝐶𝑃𝑍𝑇=
1 2𝜋185𝐻𝑧∗214𝑛𝐹= 4KΩ (38)
以上の導出によって、理論値と実験が一致することが確認された。表 2.4 が整合抵抗値 のまとめである。 表 2.4、整合抵抗値のまとめ
三角
四角
エネルギー整合抵抗
4
10
パワー整合抵抗
2
10
単位:KΩ
26
2.6 効率測定実験
論理的な分析と実験の検証をした上で、本節では、三角と四角形状の PZT デバイスの効 率測定実験を行い、二つの PZT デバイスの発電特性を検討する。本節の構成について、ま ずは効率測定理論式を導出する。次に、発電効率を評価する。 2.6.1 効率測定理論式の導出 図 2.23 に示しているのは実験の構成図である。三角と四角形状の PZT デバイスにエネル ギー整合抵抗を接続、クランプする。PZT デバイスの自由端に真上から変位計レーザーを あて、重りを縫い糸で吊り下げる。本実験では、分銅を重りとして用いた。効率測定実験 において前節の負荷整合実験と異なる部分は負荷整合のために実験方法ははじき実験の方 法を用いたことに対し、本節の実験は重りつり下げ実験の方法を用いて効率を測定するこ とである。初期変位を与える方法として、重りを用いているため、入力エネルギーを算出 できる。実験方法は、重りを吊り下げたまま、糸を切ることによって、PZT デバイスに荷 重を掛けた状態から開放することで PZT デバイスの自由端を振動させ、出力電圧を計測す る。負荷整合抵抗値を用いて出力電圧を計測して出力エネルギーを算出する。そして、出 力エネルギーと入力エネルギーのエネルギー比より効率[%]を計算する。これから、図 2.23 に基づき、入力エネルギー及び発電効率についての理論式を導出する。 図 2.23 実験構成27 入力エネルギーは
𝑊
𝑖=
1 2𝑘𝑥
2=
1 2𝑘(
𝑚𝑔 𝑘)
2=
𝑔2 2𝑘𝑚
2= 𝑄𝑚
2 (Q が定数)(39) となる。 出力エネルギーは
𝑥
0= −𝑥𝑒
−ℎ𝜔𝑡cos(𝜔𝑡) = −
𝑚𝑔 𝑘𝑒
−ℎ𝜔𝑡cos (𝜔𝑡)
(振幅減衰) (40) となる。𝑣(𝑡) =
3𝑔31𝑌𝑎2 16𝑙2𝑥
0(41) である。 (40)式を(41)式に代入し、整理すると次のように示す。
𝑊
𝑜= ∫
0𝑡𝑣(𝑡)𝑅 2𝑑𝑡
= ∫
(− 3𝑔31𝑌𝑎2 16𝑙2 × 𝑚𝑔 𝑘 𝑒−ℎ𝜔𝑡𝑐𝑜𝑠(𝜔𝑡))2 𝑅 𝑡 0dt
(42)= (−
3𝑚𝑔𝑔31𝑌𝑎2 16𝑘𝑙2)
2 1𝑅∫ (𝑒
−ℎ𝜔𝑡𝑐𝑜𝑠(𝜔𝑡))
2 𝑡 0𝑑𝑡
(43)(−
3𝑚𝑔𝑔31𝑌𝑎2 16𝑘𝑙2)
2 1𝑅を A とすると、𝑊
𝑜= A∫ (𝑒
0𝑡 −ℎ𝜔𝑡𝑐𝑜𝑠(𝜔𝑡))
2𝑑𝑡
(44) と表わされる。 部分積分方法で整理すると、
𝑢 = (𝑐𝑜𝑠(𝜔𝑡))
2𝑣
′= 𝑒
−ℎ𝜔𝑡𝑑𝑡
𝑢
′= −2cos (𝜔𝑡)sin (𝜔𝑡)𝜔𝑑𝑡 𝑣 = −
1 ℎ𝜔𝑒
−ℎ𝜔𝑡 となり、下の式に代入し、∫ (𝑒
0𝑡 −ℎ𝜔𝑡𝑐𝑜𝑠(𝜔𝑡))
2𝑑𝑡
= [−
(𝑐𝑜𝑠(𝜔𝑡)) 2 ℎ𝜔𝑒
−ℎ𝜔𝑡]
0 𝑡− ∫
0𝑡ℎ1𝑒
−ℎ𝜔𝑡𝑠𝑖𝑛 (2𝜔𝑡)𝑑𝑡
となる。 部分積分方法で整理すると、次のように示す。𝑢 = sin (2𝜔𝑡) 𝑣
′= 𝑒
−ℎ𝜔𝑡𝑑𝑡
𝑢
′= cos (2𝜔𝑡)2𝜔𝑑𝑡 𝑣 = −
1 ℎ𝜔𝑒
−ℎ𝜔𝑡28 = −(cos(𝜔𝑡))2 ℎ𝜔 𝑒−ℎ𝜔𝑡+ 1 ℎ𝜔− 1 ℎ[[− 1 ℎ𝜔𝑒−ℎ𝜔𝑡sin (2𝜔𝑡)]0 𝑡 − ∫ −1 ℎ𝑒−ℎ𝜔𝑡2 𝑡 0 cos (2𝜔𝑡)d𝑡]
=
1 − (cos(𝜔𝑡))
2𝑒
−ℎ𝜔𝑡ℎ𝜔
+
1
ℎ
2𝜔
𝑒
−ℎ𝜔𝑡sin(2𝜔𝑡) −
1
ℎ
2∫ 𝑒
−ℎ𝜔𝑡 𝑡 02(2cos (𝜔𝑡)
2− 1)𝑑𝑡
=
ℎ−𝑒−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))ℎ2𝜔 2−sin(2𝜔𝑡))−
ℎ12∫ 𝑒
𝑡 −ℎ𝜔𝑡 04 cos(𝜔𝑡)
2𝑑𝑡 +
1 ℎ2∫ 2𝑒
−ℎ𝜔𝑡 𝑡 0𝑑𝑡
=
ℎ − 𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡))
ℎ
2𝜔
−
4
ℎ
2∫ 𝑒
−ℎ𝜔𝑡 𝑡 0cos(𝜔𝑡)
2𝑑𝑡
+
2
ℎ
2[−
1
ℎ𝜔
𝑒
−ℎ𝜔𝑡]
0 𝑡ℎ
2+ 4
ℎ
2∫ 𝑒
−ℎ𝜔𝑡 𝑡 0cos(𝜔𝑡)
2𝑑𝑡 =
ℎ
2− ℎ𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡)) − 2𝑒
−ℎ𝜔𝑡+ 2
ℎ
3𝜔
ℎ
2+ 4
ℎ
2∫ 𝑒
−ℎ𝜔𝑡 𝑡 0cos(𝜔𝑡)
2𝑑𝑡 =
ℎ
2− ℎ𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡)) − 2𝑒
−ℎ𝜔𝑡+ 2
ℎ
3𝜔
∫ 𝑒
𝑡 −ℎ𝜔𝑡0
cos(𝜔𝑡)
2𝑑𝑡 =
ℎ
2− ℎ𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡)) − 2𝑒
−ℎ𝜔𝑡+ 2
ℎ𝜔
×
1
ℎ
2+ 4
=
ℎ
2− ℎ𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡)) − 2𝑒
−ℎ𝜔𝑡+ 2
ℎ𝜔(ℎ
2+ 4)
=
𝑒
−ℎ𝜔𝑡(ℎ sin(2𝜔𝑡) − ℎ
2(cos(𝜔𝑡))
2− 2) + ℎ
2+ 2
ℎ𝜔(ℎ
2+ 4)
上記の式と A を(6)式に代入すると、
𝑊
𝑜=
1 𝑅(−
3𝑚𝑔𝑔31𝑌𝑎2 16𝑘𝑙2)
2 𝑒 −ℎ𝜔𝑡(ℎ sin(2𝜔𝑡)−ℎ2(cos(𝜔𝑡))2−2)+ℎ2+2 ℎ𝜔(ℎ2+4)(45)
=
1 𝑅(−
3𝑔𝑔31𝑌𝑎2 16𝑘𝑙2)
2 𝑒 −ℎ𝜔𝑡(ℎ sin(2𝜔𝑡)−ℎ2(cos(𝜔𝑡))2−2)+ℎ2+2 ℎ𝜔(ℎ2+4)𝑚
2= 𝐾𝑚
2(K が定数) と導かれる。エネルギー回生効率は
μ =
𝑊𝑜 𝑊𝑖=
𝐾𝑚2 𝑄𝑚2= 𝑆
(S が定数) (46) となる。 ここで、𝑊𝑖:入力エネルギー、𝑊𝑜:出力エネルギー、k:板バネ係数、𝑥𝑜:変位量、h:減衰係 数、ω:周波数、Y:アドミッタンス、m:質量、𝑔31:電圧出力係数29 表 2.5 バイモルフ型エレメントの関係式 実験で評価した導出量は以下に示す。(47)式入力エネルギーはPZTプレートをばね近似して 計算することによってW=12kx2となる。フックの法則F = kxを用いることによって W=12Fx=12mgxと求めることが出来る。(48)式電力の最大値については電力波形の最大値 を 2 乗し、負荷抵抗値 R で割った値を用いる。 P=VI と I = V/R より P = V 2/Rとして求めることが出来る。(49)式出力エネルギーに関 しては前述で述べたとおりである。(50)式効率に関しても上記の実験構成で説明したように 入力エネルギーと出力エネルギーの比を用いて導出している。以上が評価した導出量とな る。
𝑊
𝑖[𝐽] = ∫ 𝐹𝑑𝑥 ≈
12𝐹𝑥
0=
1 2𝑚𝑔𝑥
0(47)
𝑃
𝑚𝑎𝑥[𝑊] = 𝑉
𝑚𝑎𝑥2/𝑅 (48)
𝑊
0[𝐽] =
1 𝑅∫ 𝑉
2𝑑𝑡 (49)
η
[%] =
𝑊0 𝑊𝑖× 100 (50)
30
2.6.2 発電特性の考察
前節で導出された理論式
μ =
𝑊𝑜 𝑊𝑖=
𝐾𝑚2 𝑄𝑚2= 𝑆
(S が定数) (51) からわかるように、重りの重量が増加するにつれて、入力エネルギーも二次オーダーで増 加していくことがわかった。同時に出力エネルギーも二次オーダーで増加していくことが わかった。従って、効率は上式に示しているように荷重と関係なく、定数 S で一定になっ ている。 図 2.24 変位の比較 この実験は 5g から 40g までの重りが加重した。図 2.24 に示しているのは自由端の最大 変位と加重重量の変化の関係である。この図から明らかなように、二つの PZT デバイスの 自由端最大変位は重りの重量に従って、正比例し増加することがわかった。この前の解析 によって、三角形状の PZT デバイスの自由端変位は四角の 1.5 倍になるはずであることを 検討したが、本実験の実測値が 1.2 倍程度である。上式から、入力エネルギーは重りの重量 が増加するにつれて、二次オーダーで増加することがわかった。同時に、出力エネルギー も重りの重さが増加するにつれて、入力エネルギーと同様に二次オーダーで増加していく。 効率は上式で証明したように荷重に関係なく、一定となっている。 0 5 10 15 20 25 30 35 40 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 Mass [g] D is ta n ce [m m ] 三角 四角 三角 四角31 e-4 e-6 図 2.25 入力エネルギー 図 2.26 出力エネルギー 0 5 10 15 20 25 30 35 40 0 1 2 3 4 5 6 7 8 Mass [g] In p u t E n erg y [J ] 0 5 10 15 20 25 30 35 40 0 1 2 3 4 5 6 7 8 Mass [g] O u tp u t E n erg y [J ] 三角 四角 三角 四角 三角 四角
32 図 2.25 と図 2.26 に二つの PZT デバイスの入力エネルギーと出力エネルギーが示す。実験 の結果は、理論の解析と同じように、全部二次オーダーで増加していくことが確認された。 図 2.27 に負荷整合抵抗を考慮した上で二つの PZT デバイスの発電効率の比較である。この 図から明らかなように、三角 PZT デバイスの平均発電効率は 0.93%に対し、四角 PZT デバ イスの平均発電効率は 0.5%に止まる。つまり、三角形状 PZT デバイスのエネルギー回生効 率は四角より 2 倍向上した。 もし三角形状の PZT デバイスの両面とも全体に圧電素子を貼り付けると有効面積が増える ので、PZT デバイスが曲げる際に蓄えられる弾性エネルギーが電気エネルギーに変換しや すいのではないかと推測され、効率がさらに改善されると考えられる。 この前に三角と四角PZT デバイスの入力エネルギー、出力エネルギーと効率を確認した。 次に、発電特性を考察するため、効率考察実験で35g が加重される際の出力電圧と電力を 取り上げて比較する。 図2.27 三角と四角の発電効率の比較 5 10 15 20 25 30 35 40 0 0.2 0.4 0.6 0.8 1 Mass [g] E ffi ci en cy [% ]
三角平均効率 0.93%
四角平均効率 0.5%
33 表2.6 三角 PZT デバイスのパラメータ 重りの重量[g] 変位[mm] 入力エネルギー [J] 出力エネルギー [J] 効率[%] 5 0.6 1.47e-005 1.0e-008 0.68 10 0.9 4.41e-005 3.88e-007 0.88 15 1.4 1.03e-004 9.91e-007 0.96 20 1.9 1.86e-004 1.74e-006 0.94 25 2.2 2.69e-004 2.78e-006 1.0 30 2.9 4.32e-004 4.29e-006 0.99 35 3.1 5.32e-004 5.42e-006 1.0 40 3.7 7.15e-004 8.52e-006 1.2 表2.7 四角 PZT デバイスのパラメータ 重りの重量[g] 変位[mm] 入力エネルギー [J] 出力エネルギー [J] 効率[%] 5 0.33 8.09e-006 3.09e-008 0.38 10 0.73 3.60e-005 1.17e-007 0.33 15 1.1 8.09e-005 4.15e-007 0.51 20 1.5 1.47e-004 6.41e-007 0.44 25 2.0 2.55e-004 1.32e-006 0.51 30 2.3 3.38e-004 1.88e-006 0.55 35 2.7 5.31e-004 3.08e-006 0.58 40 3.2 6.27e-004 3.59e-006 0.57
34 図2.28 出力電圧の波形図 図2.29 出力電力の形図 4.1 4.15 4.2 4.25 4.3 4.35 4.4 4.45 4.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 Time [s] V o lt a g e [V ] 三角 四角 4.18 4.2 4.22 4.24 4.26 4.28 4.3 4.32 4.34 0 1 2 3 4 5 x 10-4 Time [s] P o w er [ w ]
35 図 2.28 と図 2.29 は出力電圧と出力電力の波形図である。図 2.28 からわかるように、四角 の最大出力電圧は 2.1V であり、三角の出力電圧は 1.6V である。だが、負荷整合抵抗は三角 の 4kΩが四角の 10kΩより小さいため、図 2.29 に示している出力パワー特性が出力電圧と 比較して逆らかな特性が出ている。三角の最大出力電力が 0.57mW に対して四角の最大出力 電力は 0.43mW である。なお、二つの図から明らかなように、三角の振動が四角より大きい ということがわかった。つまり、前節で示した通り三角の共振周波数が四角より大きいこ とも確認できる。
36
2.7 PZT 素子を上側と下側に貼り付けた場合の比較
本節では、PZT 素子が貼り付けられる方式についての考察を行う。これまで、PZT 素子 をアルミ板の上側に貼り付ける場合の発電特性を考察した。これから、下側に PZT 素子を 貼り付ける場合は出力特性がどのように変化するかを検討する。上側は引っ張り荷重であ り、下側は圧縮荷重である。そして、上側と下側の場合の出力特性を比較する。 図 2.30 三角の上側と下側の出力エネルギーの比較 図 2.31 四角の上側と下側の出力エネルギーの比較 0 5 10 15 20 25 30 35 40 0 1 2 3 4 5 6 7 8 Mass [g] O u tp u t E n erg y [J ] 上 下 0 5 10 15 20 25 30 35 40 0 0.5 1 1.5 2 2.5 3 3.5 4 Mass [g] O ut pu t E ne rg y [J ] 下 上37 図 2.30 と図 2.31 に三角と四角形状の PZT デバイスの上側と下側に PZT 素子を貼り付け た場合の出力特性を示す。この二つの図からわかるように三角でも四角でもその PZT デバ イスに対して、出力エネルギーが上側に PZT 素子を貼り付けたほう(引っ張り荷重)が大きい ということがわかった。図 2.32 と図 2.33 は三角と四角形状の PZT デバイスの上側と下側に PZT 素子を貼り付けた場合の共振周波数を示している。この二つの図から明らかなように、 共振周波数がほぼ変わらないと考えられる。 図 2.32 三角の上側と下側の共振周波数の比較 図 2.33 四角の上側と下側の共振周波数の比較 0 50 100 150 200 250 300 350 400 450 500 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 Frequency [Hz] Po w er Sp ec tru m M ag ni tu de (d B) 0 50 100 150 200 250 300 350 400 450 500 -80 -70 -60 -50 -40 -30 -20 -10 0 10 Frequency [Hz] P o w er S p ec tru m M ag n it u d e (d B) 上 下
38 次は 35g が加重される場合の自由端変位と出力電圧を取り上げて検討し、上側と下側の 出力エネルギーが違う原因を調べる。図 2.34 と図 2.35 に示しているのは三角と四角形状の 上側と下側に PZT 素子を貼り付けた場合の PZT デバイスの自由端変位と出力電圧の波形図 である。三角については、変位の行き過ぎる量が下側(圧縮荷重)のほうが大きい。上側と下 側の最大出力電圧はほぼ同じだが、下側のほうが減衰早いので、出力エネルギーが小さい ということが推測できる。四角に対しては、上側と下側の場合、最大変位がほぼ同じだが、 上側の出力電圧が下側より大きいので、上側の出力エネルギーが下側より大きいというこ とになった。 図 2.34 三角の上側と下側の変位と出力電圧の比較 4.1 4.15 4.2 4.25 4.3 4.35 4.4 4.45 4.5 -5 0 5 10 Time [s] D is ta n ce [m m ] 4.1 4.15 4.2 4.25 4.3 4.35 4.4 4.45 4.5 -2 -1 0 1 2 Time [s] V o lt ag e [V ] 上 下
39 図 2.35 四角の上側と下側の変位と出力電圧の比較 3 3.05 3.1 3.15 3.2 3.25 3.3 3.35 3.4 3.45 3.5 -3 -2 -1 0 1 Time [s] D is ta n ce [m m ] 3 3.05 3.1 3.15 3.2 3.25 3.3 3.35 3.4 3.45 3.5 -2 -1 0 1 2 3 Time [s] V o lt ag e [V ] 下 上
40 e-4
第 3 章
振動発電デバイスの配線方式に関する研究
前章で形状が違う三角と四角形状の PZT デバイスの発電特性を考察し、比較した。比較 の結果として、三角の PZT デバイスの発電特性が四角より向上したということを確認した。 本章では、三角形状の PZT デバイスを利用し、効率を高めるために、両面ともに PZT 素子 を貼り付けた場合の発電特性を検討する。特に、両面の PZT デバイスに対し、配線方法を 比較し、効率の向上を目指す。また、デバイスの両面全部分に PZT 素子を貼り付けた PZT デバイスを試作し、発電特性を考察する。3.1 両面の PZT デバイスの考察
まず、実験の条件を紹介する。効率の測定が目的であるため、前章と同様に重り吊り下 げ実験を行い、考察した。この PZT デバイスは別々に負荷抵抗を接続する。つまり、上側 に 4kΩ(負荷整合抵抗)の抵抗を繋いだ同時に下側も 4 kΩの抵抗を繋いでいる。重りの重量 が 5g から 40g まで加重した。 図 3.1 と図 3.2 に両面と一面の三角 PZT デバイスの入力エネルギーと出力エネルギーを示 す。この二つの曲線図に示されるように、入力と出力エネルギーが重りの重量が増加して いくにつれて二次オーダーで増加して行くことがわかった。入力エネルギーでも出力エネ ルギーでも一面のほうが大きいということが明らかである。平均発電効率には、一面の平 均効率は 0.93%であり、二面の平均効率は 0.52%であるという結果が図 3.3 に示されている。 次に 35g 加重した際に変位と電圧の時間応答波形によって説明する。 図 3.1 両面と一面の入力エネルギーの比較 0 5 10 15 20 25 30 35 40 -2 0 2 4 6 8 Mass [g] In pu t E ne rg y [J ] 一面 両面41 e-6 図 3.2 両面と一面の出力エネルギーの比較 図3.3 一面と両面の効率比較
5
10
15
20
25
30
35
40
0
1
2
3
4
5
6
7
8
Mass [g]
Output E ne rgy [ J]両面
一面
5 10 15 20 25 30 35 40 0 0.5 1 1.5 Mass [g] E ff ic ie nc y [ % ] 両面 一面一面:平均
0.93%
両面:平均
0.52%
42 表 3.1 両面の三角 PZT デバイスのパラメータ 重りの重量[g] 変位[mm] 入力エネルギー [J] 出力エネルギー [J] 効率[%] 5 0.6 2.54e-005 1.88e-007 0.48 10 0.9 5.88e-005 2.76e-007 0.47 15 1.4 1.13e-004 5.04e-007 0.48 20 1.9 1.57e-004 8.15e-006 0.52 25 2.2 2.11e-004 1.00e-006 0.50 30 2.9 2.75e-004 1.52e-006 0.55 35 3.1 3.77e-004 2.10e-006 0.56 40 3.7 4.71e-004 2.54e-006 0.54 図 3.5 は 35g の重りが加重される際の時間応答波形である。上の図は変位、下の図は出力 電圧の時間応答である。同様に加重した場合、一面の最大変位が二面より大きく、両面の ほうが減衰早い。両面 PZT デバイスには、二つの PZT 素子が貼り付けられて厚くなること に起因する。つまり、デバイスが硬くなったので、同じ重りを吊り下げた場合の変位が小 さくなる。両面の電圧は上側の出力電圧を選択した。両面の振幅が小さいので、電圧も小 さく、また、減衰が早いため、出力エネルギーも小さくなった。図 3.4 に共振周波数を示す。 図3.4 一面と両面の共振周波数の比較 0 50 100 150 200 250 300 350 400 450 500 -80 -70 -60 -50 -40 -30 -20 -10 0 10 20 Frequency P ower S pect rum M ag ni tu de (d B ) 両面 一面
43 図 3.5 35g 加重した場合の応答比較
4.1
4.15
4.2
4.25
4.3
4.35
4.4
4.45
4.5
-2
0
2
4
6
Time [s]
D is ta n c e [m m ]4.1
4.15
4.2
4.25
4.3
4.35
4.4
4.45
4.5
-2
-1
0
1
2
Time [s]
P o w e r [w ]一面
両面
44
3.2 配線方式に関する考察
本節は三角形状の両面 PZT デバイスの最適配線方式について考察する。まずは、使用し たバイモルフ圧電素子を紹介する。前節の実験と異なり、次の研究にて使用したバイモル フ圧電素子の寸法と仕様を図 3.6 と表 3.2 に示している。 図 3.6 バイモルフ圧電素子の寸法 表 3.2 バイモルフ圧電素子の仕様LPD3713X
変位量
150μm at 70V
静電容量
450nF±20%
誘電損失(tanδ)
≤3.0%
絶縁抵抗
≥100MΩ形状
37×13.4×0.6 mm45 PZT デバイスの発電特性の改善を目指し、本節で試作されたデバイスの PZT 素子が占め る面積が最大となるよう、次に三角形状の PZT デバイスを貼り付けるアルミ板の最適な長 さと幅を以下の式により導出した。
e =
𝑃𝑍𝑇素子の面積
三角形状の
𝑃𝑍𝑇デバイス全体面積
=
481
(13 + 2𝑥) (37 + 37
𝑥 ) ×
1
2
× 100%
=
481
277.5 + 240.5
𝑥
+ 37𝑥
× 100%
図 3.7 両面の PZT デバイスx
46 上式によって、e が最大となる際に x の値を導出することができる。図 3.7 の両面の PZT デバイスに x の部分が表示されている。以上から、x=6.5mm のとき、e の値が最大の 50% に達する。つまり、PZT 素子が三角全体で占める比率が最大となる。 以下の実験はこの PZT デバイスを用いて考察する。一面、並列と直列の配線方式で同一 の PZT デバイスに対する三つの状況で発電特性を検討する。まずはインピーダンス整合実 験を行い、出力エネルギー最大となる際の抵抗を確認する。そして、効率測定実験を行う。 つまり、別々に重り吊り下げ実験によって、3 種類の配線方式で発電特性を考察して比較し 最適な配線方式を探る。 インピーダンス整合図について説明する。左の図は概略図である。左図のピーク値近傍 に細かく取った数値が右の図に示されている。図 3.8 と図 3.9 は一面のみのインピーダンス 整合結果である。負荷抵抗が 3.61kΩのときに出力エネルギーと出力パワーが最大となる。 同様に図 3.10 と図 3.11 は並列、図 3.12 と図 3.13 は直列のインピーダンス整合結果を示して いる。並列の場合、負荷抵抗は 1.88 kΩであり、直列の場合、負荷抵抗は 8 kΩであるとき に、それぞれの出力エネルギーと出力パワーが最大となる。表 3.3 は整合負荷抵抗のまとめ である。 図 3.8 一面のエネルギー整合 1 2 3 4 5 6 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 Impedance [kΩ ] O utput E nerg y [J ] 3.4 3.6 3.8 4 4.2 4.4 1.4 1.5 1.6 1.7 1.8 1.9 2 Impedance [kΩ ] O utput E nerg y [J ] e-6 e-6
47 図 3.9 一面のパワー整合 図 3.10 並列のエネルギー整合 図 3.11 並列のパワー整合 1 2 3 4 5 6 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Impedance [kΩ ] O utput P o wer [ W ] 3.4 3.6 3.8 4 4.2 4.4 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 5 Impedance [kΩ ] O utput P o wer [ W ] e-4 e-4 1.5 2 2.5 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 Impedance [kΩ ] O utput E nerg y [J ] 1 2 3 4 5 6 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 Impedance [kΩ ] O utput E nerg y [J ] 1 2 3 4 5 6 1.5 2 2.5 3 3.5 4 4.5 Impedance [kΩ ] O utput P o wer [ W ] 1.5 2 2.5 4 4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 Impedance [kΩ ] O utput P o wer [ W ] e-6 e-6 e-4 e-4
48 図 3.12 直列のエネルギー整合 図 3.13 直列のパワー整合 表 3.3 整合抵抗
エネルギー整合抵抗
パワー整合抵抗
一面
3.61
3.61
並列
1.88
1.88
直列
8
8
単位 : kΩ 5 6 7 8 9 10 0.75 0.8 0.85 0.9 0.95 1 1.05 1.1 Impedance [kΩ ] O utput E nerg y [J ] 7.4 7.6 7.8 8 8.2 8.4 1 1.01 1.02 1.03 1.04 1.05 1.06 1.07 Impedance [kΩ ] O utput E nerg y [J ] e-6 e-6 5 6 7 8 9 10 1.4 1.45 1.5 1.55 1.6 1.65 1.7 1.75 1.8 Impedance [kΩ ] O utput P o wer [ W ] 7.4 7.6 7.8 8 8.2 8.4 1.58 1.6 1.62 1.64 1.66 1.68 1.7 1.72 1.74 Impedance [kΩ ] O utput P o wer [ W ] e-4 e-4
49 図 3.14 共振周波数の比較 図 3.14 は一面、並列と直列の配線方式で PZT デバイスの共振周波数を示している。3 種 類の配線方式で PZT デバイスの共振周波数が変化しないということを確認した。
Z =
1
𝑊𝐶
=
1
2𝜋𝑓𝐶
上式から、負荷抵抗、共振周波数とコンデンサの関係がわかった。次に、コンデンサの 直列と並列の計算について説明する。 図 3.15 コンデンサの並列接続 コンデンサを並列接続すると、極板の面積が並列にした分だけ増えることになる。計算 は単純に加算するだけである。C=C1+C2 になる。0
200
400
600
800
1000
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Frequency
P owe r S pe c tr um M a gni tude ( dB )並列
直列
一面
50 図 3.16 コンデンサの直列接続 コンデンサ直列接続すると、極板間の距離が接続した分だけ長くなる。容量は減少する ことになる。合成容量を C、接続する容量を C1、C2 とすると、C=1/(1/C1+1/C2)となる。本 実験では、同じ PZT 素子を用いるので、素子のコンデンサ容量を C としたら、以上の解析 によって、並列の容量は 2C、直列の容量は 0.5C になる。従って、負荷抵抗、共振周波数と コンデンサの関係によって、もし一面の負荷抵抗値が Z だとしたら、並列の負荷整合抵抗 が 0.5Z であり、直列の負荷整合抵抗が 2Z となる。実験で得たインピーダンス抵抗値は表 3.3 に示される。これまで、実験値と理論値が一致することが証明された。 図 3.17 出力電圧の比較
2.55
2.6
2.65
2.7
2.75
2.8
-0.4
-0.2
0
0.2
0.4
0.6
Time [s]
Volt a ge [ V]直列
一面
並列
51 図 3.18 出力電力の比較 次に、一面、並列と直列の PZT デバイスの重り吊り下げ実験を行い、考察する。図 3.17 と図 3.18 は重りが 80g であるときに 3 種類の配線方式で電圧と電力の時間応答波形である。 電圧の比較によって、一面の最大出力電圧が一番大きい。だが、電力の比較については、 並列が一面と直列より大きいということがわかった。原因は、並列の負荷整合抵抗値が一 番小さくて、P=𝑈2/𝑅によって、並列の出力パワーが最大になった。表 3.4 で最大出力電圧 と最大電力をまとめた。 表 3.4 80g で加重した場合の最大出力電圧と電力 電圧[V] 電力[mW]
一面
0.75
0.15
直列
0.70
0.07
並列
0.63
0.22
2.58
2.6
2.62
2.64
2.66
2.68
2.7
0
1
2
x 10
-4Time [s]
P owe r [ W ]並列
一面
直列
52 図 3.19 と図 3.20 に一面、並列と直列の配線方式で出力エネルギーと効率の比較を示す。 図 3.4 から分かるように、三種類の配線方式で PZT デバイスの出力エネルギーが全部二次 オーダーで増加していくことを確認した。数値の比較では並列配線方式の出力エネルギー が一面と直列に比べ、一番大きいということが分かった。入力エネルギーがここで示され てない原因は、この実験で一面、並列と直列の配線方式で同一の PZT デバイスを用いたの で、同じ重りで加重した場合の入力エネルギーは変化しない。よって、入力エネルギーを 示す必要がないと考える。入力エネルギーが同じので、発電効率は出力エネルギーで決め られると考えられる。従って、図 3.20 の効率の比較によって、並列の効率が 0.43%であり、 (一面 0.2%、直列 0.11%)一番高いということがわかった。 図 3.19、出力エネルギーの比較
50
60
70
80
90
100
0
5
10
15
20
Mass [g]
Output E ne rgy [ J]並列
一面
直列
e-753 図 3.20 効率の比較
50
60
70
80
90
100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Mass [g]
E ff ic ie nc y [ % ]並列:0.43%
一面:0.2%
直列:0.11%
54
3.3 単体とデバイスの比較
前節で一面、並列と直列の配線方式で PZT デバイスの発電特性が比較した。その結果、 並列の発電特性が一番良いことがわかった。しかし、効率が PZT を貼り付けたより低下し ている。本節は PZT デバイスに貼り付けられた PZT 素子の発電特性を考察し、デバイスと PZT 単体での発電特性を比較する。 まず、PZT 単体に対し、インピーダンス整合実験を行った。実験方法は相変わらずはじ き実験である。PZT 単体がとても柔らかいと想定されるので、インピーダンス実験を行う 際に自由端に与えた変位はとても小さく 0.3mm である。負荷抵抗値は 3~9 kΩ、計測値は PZT 素子の出力電圧と自由端変位である。はじき実験の結果は図 3.21 に示されている。左 はエネルギー整合の結果であり、右はパワー整合の結果である。負荷抵抗が6 kΩの際に、 同一の条件で出力エネルギーと出力パワーが最大となることがわかった。 図 3.21 PZT 単体エネルギーとパワーのインピーダンス整合 表 3.5 PZT 単体のインピーダンス整合エネルギー整合抵抗
6
パワー整合抵抗
6
単位:kΩ 3 4 5 6 7 8 9 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 Impedance [kΩ ] O utput E nerg y [J ] 3 4 5 6 7 8 9 5 6 7 8 9 10 11 12 13 Impedance [kΩ ] O utput P o wer [ W ] e-6 e-355 図 3.22 PZT 単体の入力エネルギーと出力エネルギー 図 3.23 PZT 単体の効率 インピーダンス実験をした上で、PZT 単体の効率測定実験を行った。前章の効率測定実 験と同じ方法を用い、40g~60g の重りで加重した。図 3.22 に示しているのは PZT 単体の出 力エネルギーと入力エネルギーである。図 3.23 は PZT 単体の平均効率を示している。図 3.22 からわかるように、PZT 単体の入力エネルギーは並列の 1.7 倍となる。出力エネルギーは並 列の 26 倍となる。同じ重りを吊り下げた場合、PZT 単体がデバイスより柔らかいので、自 由端の最大変位もデバイスより 1.7 倍となる、入力エネルギーは同一の重りで加重したら、 自由端の変位と正比例の関係である。よって、入力エネルギーは並列の 1.7 倍になるという ことを検証した。 40 45 50 55 60 0 2 4 6 8 10 Mass [g] E ff ic ie nc y [ % ] 40 45 50 55 60 6 8 10 12 14 16 18 20 Mass [g] Output E ne rgy [ J ] 40 45 50 55 60 1 1.5 2 2.5 3 3.5 Mass [g] Input E ne rgy [ J ]
並列の 1.7 倍
並列の 26 倍
e-4 e-6平均:6.2%
56 図 3.24 共振周波数の比較 図 3.25 50g 加重の場合の変位と電圧の比較
0
100
200
300
400
500
600
700
800
900 1000
-100
-80
-60
-40
-20
0
Frequency [Hz]
P owe r S pe c tr um M a gni tude ( dB )単体
並列
2.6 2.8 3 3.2 3.4 3.6 3.8 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Time [s] Dis ta nc e [ m m ] 単体 並列 3 3.02 3.04 3.06 3.08 -2 0 2 4 6 Time [s] Volt a ge [ V] 単体 並列57 図 3.24 は PZT 単体とデバイスの共振周波数の比較である。単体の共振周波数が 290Hz に 対し、並列の PZT デバイスの共振周波数が 520Hz である。貼り付いたデバイスより PZT 単 体が柔らかいため、PZT 単体の共振周波数も高くなると想定され、実測値でもこれを確認 した。図 3.25 に自由端変位と出力電圧の比較が示されている。同じ重量の重りで加重した 場合、単体が柔らかいので、自由端変位も大きくなる。左の図に示しているように、単体 の最大変位が 0.72mm であり、並列デバイスの変位が 0.46mm である。右の図から分かるよ うに、単体の最大電圧が 7V だが、並列の最大電圧は 0.5V に過ぎない。以上の比較で分か るように、PZT デバイスの場合、発電特性が劣化している。原因としては、入力エネルギ ーは大量にアルミ板に吸収され、発電効率が低下したと考えられる。 表 3.5 50g の場合の出力データ
単体
両面(並列)
変位[mm]
0.72
0.46
最大電圧[V]
7
0.5
最大電流[mA]
1.2
0.3
最大電力[mW]
8.2
0.15
エネルギー[J]
1.1e-5
4.2e-7
58