1
目次
第1章 序論 2
○1.1 背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・2
○1.2 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3
第2章 外乱オブザーバに基づく内部モデル制御 4
○2.1 内部モデル制御系・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4
・ 2.1.1 IMC(内部モデル制御)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4
・ 2.1.2 IMC-PID(PID 制御に基づく内部モデル制御)・・・・・・・・・7
○2.2 外乱オブザーバに基づく内部モデル制御・・・・・・・・・・・・・・・・・・・9
・ 2.2.1 外乱オブザーバ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・9
・ 2.2.2 DIMC(外乱オブザーバに基づく内部モデル制御)・・・・・10
第3章 DIMC の適応化手法 13
○3.1 DIMC の適応化・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・13
○3.2 離散モデルベースの DIMC の実現・・・・・・・・・・・・・・・・・・・・・・・・15
・ 3.2.1 離散ベース化・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・15
・ 3.2.2 シミュレーション結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・17
第4章 DIMC へのデータ駆動型適応同定手法の導入 19
○4.1 データ駆動型適応同定・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・19
・4.1.1 データ駆動型手法・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・19
・4.1.2 データ駆動型適応同定・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・21
・4.1.3 シミュレーション結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・25
○4.2 データ駆動型適応化手法の DIMC への導入・・・・・・・・・・・・・・・・28
・4.2.1 データ駆動型適応化 DIMC 概要・・・・・・・・・・・・・・・・・・・・・・・28
・4.2.2 シミュレーション結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・30
第5章 データ駆動型適応化 DIMC 有効性検証 35
○5.1 精密ステージへの応用・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・35
・5.1.1 精密ステージ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・35
・5.1.2 シミュレーション結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・37
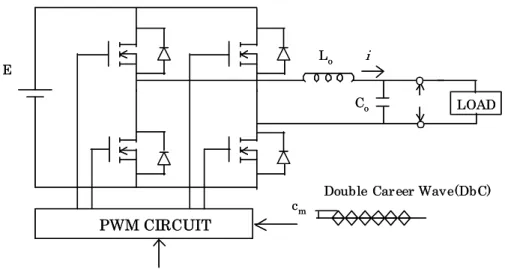
○5.2 ディジタルスイッチング電源への応用・・・・・・・・・・・・・・・・・・・・42
・5.2.1 ディジタルスイッチング電源・・・・・・・・・・・・・・・・・・・・・・・・・42
・5.2.2 シミュレーション結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・44
第6章 まとめ 48
謝辞 49
参考文献 50
2
第
1 章 序論
1.1 背景
近年,プロセスシステムや大型機械,メカトロニクス機器の要求タスクの高性能化に伴 い複雑化してきている。その結果高性能なモーションコントロールが要求され,固定のパ ラメータを用いる従来型のPID制御では望ましい応答を得ることが困難となってきている。 ところが、制御系の構造の容易さ、コントローラのパラメータの物理的な意味が明確であ ること、操縦者が経験に基づき良好な応答を得られるパラメータを決定しやすいなどの理 由から産業界では今なおPID制御が広く用いられており、その実装率は90%以上といわれて いる。しかし、多くのプロセスシステムや大型機械、メカトロニクス機器の発達による位 置決め機構の、より高性能なモーションコントロールなどのサーボ機構では摩擦などの非 線形特性を有しており、固定のパラメータを用いるPID制御では望ましい応答を得ることが 困難な場合がある。一方、計算技術や制御技術の発展により、ロバスト制御や適応制御な どの複雑な制御手法のものでも高効率の手法が提案されている。また、ロバスト制御や適 応制御の実システムでの動作報告がされている。 非線形特性の解析と同定の問題点はニューラルネットワーク(NN)や遺伝的アルゴリズ ム(GA)、ファジィ理論などを用いて解決できる場合もあるが、これらの手法による学習に は多大な時間、コストが必要である。また、パラメータを得られたとしても、制御対象の 特性変化や経年劣化等などの動作条件によって、最適な値が逐次変化していき、正確な解 析と同定は非常に困難である。よって、その応答の良好な結果を得ることも困難となる。 このような理由から、従来の研究では非線形特性の解析とモデリングを中心に取り扱って いるものがほとんどである。3
1.2 目的
本研究ではDIMC のモデル化誤差への補償のために離散ベースの DIMC へのデータ駆動 型適応同定手法の導入に関する開発をおこなう。 制御対象をできるだけ詳細な数式で記述し、制御対象のモデルを制御系の中に組み込む モデル駆動型のコントローラが提案されている。このモデル駆動型制御手法の一つとして、 内部モデル制御(IMC)がある。内部モデル制御は PID 制御と同様に、コントローラがシ ンプルであり、さらに、制御対象の不確かさに対しても高い安定性を有していることが特 徴である。しかし、位置制御系のように制御対象が積分特性を有する制御対象の場合、IMC ではステップ外乱に対して常に追従誤差が存在してしまう。 本研究では、IMC に外乱オブザーバを導入することで、上述した問題を解決する外乱オ ブザーバに基づく制御手法を用いる。本手法の特徴としては、制御対象の逆特性を利用し たオープンループ駆動ベースの制御系で構成され、モデル化誤差と外乱に対してのみフィ ードバック補償を行う。これにより、目標値に対して行き過ぎ量が皆無であり、かつ制御 対象のノミナルモデルさえ高精度に同定できれば制御帯域幅を極めて広帯域化でき、安定 性、ノイズ特性にも優れる。また、従来ではシステム同定などで求めた離散モデルを連続 時間モデルに一度変換し、制御器及び外乱オブザーバのフィルタを決定し、連続時間モデ ルから離散時間モデルに変換し、シミュレーションや実験を行ってきた。ここで、離散モ デルベースの外乱オブザーバに基づく内部モデル制御を実現すれば、オンラインでの適応 制御時の演算を軽減することができる。しかしながら、外乱オブザーバに基づく内部モデ ル制御の適応化にはプラントの離散モデルが必要である。ここでは、フィルタ、ノミナル モデルともに離散時間ベースで構成し、離散モデルベースの外乱オブザーバに基づく内部 モデル制御を実現する。さらに、制御器内に制御対象のノミナルモデルを含んでいるため、 モデル化誤差および制御対象の経年劣化のように制御対象のダイナミクスの変化に対して は適応機構を導入することでその補償を行う。 本研究では、外乱オブザーバに基づく内部モデル制御の適応機構としてデータ駆動型適 応同定手法を導入し、その有効性を精密ステージの位置決め制御およびディジタルスイッ チング電源において検証をおこなう。 本論文は以下のような構成となっている. 第 2 章では外乱オブザーバに基づく内部モデル制御の概要を示し、第 3 章では外乱オブ ザーバに基づく内部モデル制御の適応化と離散ベース化の有効性を検証し、第 4 章では外 乱オブザーバに基づく内部モデル制御へのデータ駆動型適応同定法の導入を示し、第 5 章 ではデータ駆動型適応を導入した外乱オブザーバに基づく内部モデル制御の産業機器への 応用を検討し、第6 章で本論文のまとめを述べる。4
第
2 章 外乱オブザーバに基づく内部モデル制御
2.1 内部モデル制御系
IMC(内部モデル制御)は、M.Morari によって提唱されたプロセス制御系に対する制御法 である。これはYoula のパラメトリゼーションを基本としたH
2制御などと関連しているだ けでなく、具体的なプロセス制御系の設計法としてまとめられている。2.1.1 IMC(内部モデル制御)
この内部モデル制御系のブロック図を図2.1 に示す。P
、P
nは制御対象とそのノミナルモデルを表し、F
はIMC フィルタで 1 n FP がバイ プロパーとなる伝達関数を選択する。例えば、P
nの相対次数をn
とすると、1
(
i1)
nF
s
τ
のように設定できる。ここで、s
はラプラス演算子を表す。
制御対象が既知とすると、IMC の設計パラメータはフィルタの帯域幅 1/
i[rad/s]のみで あり、設計が容易な点が利点である。また、この制御構成からわかるように、IMC ではモ デル化誤差がなければ目標値r
から出力y
までの伝達特性はF
となる。すなわち、フィー ドバックループが無く直列補償器によるオープンループ駆動である。これに対して、モデ ル化誤差や外乱d
が存在する場合にのみ、P
とP
nの出力の差分を利用し、フィードバック 補償が行われることになる。 ここでは内部モデル制御の目標値応答および外乱応答について考える。ここでは簡単な モデルの例を用い、制御対象に積分特性を含む場合と含まない場合の2通りのIMC 制御系 について考察する。また以下では、産業応用を考慮し目標値はステップ指令、また外乱は ステップ状の外乱を仮定する。 (1)制御対象に積分特性が含まれない場合 制御対象のモデルが1
1
s
P
n で与えられた場合、IMC 制御器C
は5 1
1
1
(
1)
(1
)
n i iF
s
C
P
s
F
s
s
(2.1.1) となり、制御器には積分器が残り、一形の制御系が構成できる。 また、目標値応答および外乱応答はd
s
s
s
r
s
y
r
s
s
d
s
y
i i i i1
(
1
)(
1
)
1
)
(
1
1
1
(2.1.2) となり、目標値応答、外乱応答ともに定常偏差は残らない。 (2)制御対象に積分特性が含まれる場合 制御対象のモデルが1
nP
s
で与えられた場合、IMC 制御器C
は 11/(1
)
1
(1
)
1 1/(1
)
i n i iF
s
C
P
s
F
s
(2.1.3) となり、制御器の積分器がなくなる。目標値応答および外乱応答は 21
1
1
(
)
1
(
1)
i i i iy
d
r
y
r
d
s
s
s
(2.1.4) となり、目標値応答に対して定常偏差は残らないが、外乱応答には定常偏差が残る。6 図2.1 内部モデル制御系のブロック図 controller plant plant model 1
P
nF
nP
P
y
d
u
r
controller plant plant model 1
P
nF
nP
P
y
d
u
r
controller plant plant model 1
P
nF
nP
P
y
d
u
r
7
2.1.2 IMC-PID(PID 制御器に基づく内部モデル制御)
前節で示したように、位置制御系のように制御対象が積分特性を含む場合、IMC は有効 ではない。これを解決する手法としてIMC フィルタF(s)を次のように設計する。 1)
1
(
1
)
1
(
)
(
n i is
s
n
s
F
(2.1.5)この手法はIMC-PID と呼ばれ、IMC 制御器を等価的に PID 制御器とみなすことができる。 これにより目標値応答および外乱応答に定常偏差は残らない。しかしながら、PID 制御器 と等価であるのでモデル化誤差や外乱が存在しない場合でも目標値応答において必ずオー バーシュートが発生するという問題点を有する。 制御対象のモデルPnを以下の式で与える。
)
(
)
(
1 1p
s
s
k
s
P
n
ここで、k1、p1は前節と同様とし、P(s)=Pn(s)とする。制御対象が 2 次系(n=2)であるの で 3)
1
(
1
3
)
(
s
s
s
F
i i
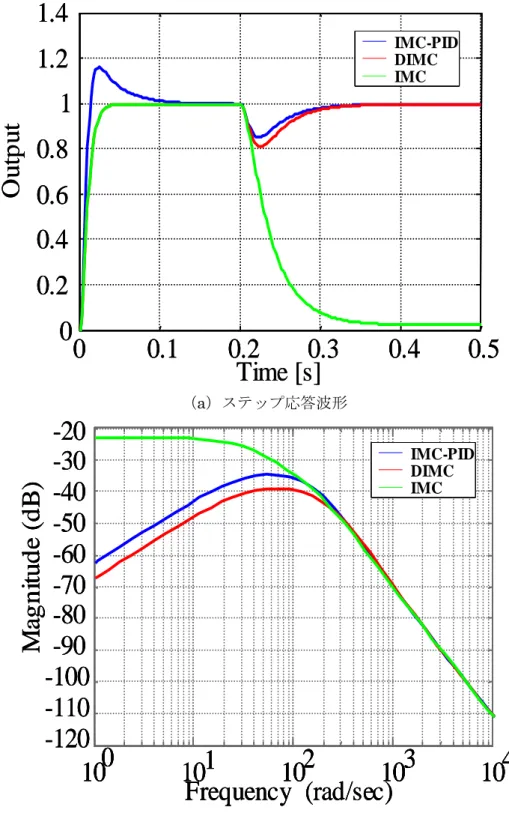
としてステップ応答シミュレーションを行った結果を図2.2(a)に示す。 ここで、シミュレーション条件はk1 1364,p1215,τi 1/(2π80)としている。また、比 較のために同帯域でのIMC 制御系の応答波形を重ねて示す。IMC-PID 制御系では、目標値 応答においては15%程度オーバーシュートが見られるが、外乱に対してはドロップ量も小さ く、定常偏差も補償できている。また、IMC-PID 制御器ならびに IMC 制御器の外乱に対す る周波数特性を比較すると図 2.2(b)に示されるように IMC-PID 制御器は一形の微分特性が 得られ、ステップ外乱に対する定常偏差が補償されていることが分かる。8 (a)ステップ応答波形 (b)外乱の周波数特性 図2.2 IMC-PID と IMC の比較
0
0.1
0.2
0.3
0.4
0.5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time [s]
O
u
tp
u
t
IMC-PID IMC IMC-PID IMC0
0.1
0.2
0.3
0.4
0.5
0
0.1
0.2
0.3
0.4
0.5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time [s]
O
u
tp
u
t
IMC-PID IMC IMC-PID IMC-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
M
ag
n
it
u
d
e
(d
B
)
10
0
101
10
2
10
3
10
4
Frequency (rad/sec)
IMC-PID IMC IMC-PID IMC-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
M
ag
n
it
u
d
e
(d
B
)
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
M
ag
n
it
u
d
e
(d
B
)
10
0
101
10
2
10
3
10
4
Frequency (rad/sec)
10
0
10
0
101
101
10
10
2
2
10
10
3
3
10
10
4
4
Frequency (rad/sec)
IMC-PID IMC IMC-PID IMC9
2.2 外乱オブザーバに基づく内部モデル制御
2.2.1 外乱オブザーバ
外乱オブザーバは、制御入力と出力情報を用いて制御対象にかかる外力を推定し、それ をフィードバックすることで外乱補償を行うものである。外乱オブザーバのブロック図を 図2.3(a)に示す。ここで外乱をd、入力をiref、制御対象の伝達関数をP(s)、そのモデルを Pn(s)、出力をyとする。y
P
i
d
ref
n1 (2.2.1) となるため、入力と制御対象の逆特性から外乱 d が計算で求められる。しかし、制御対 象に積分特性を含んでいる場合、位置の微分が必要となるためその実現は難しく、また、 仮に可能であったとしても、高周波でハイゲインとなるため観測ノイズの影響を非常に 受けやすくなる。そこで次式に示しようにdに低域通過フィルタを通して得られる出力dˆ
を推定値とする。また、nはF×Pn-1がプロパーになるように決定する。d
s
d
F
d
n i d)
1
(
1
ˆ
(2.2.2) これを図示したのが図2.3(b)である。この点線で囲まれた部分は、制御対象への入力およ び出力から外乱を推定するため、外乱オブザーバ(disturbance observer)と呼ばれる。こ のとき、外乱オブザーバの極は式(2.2.2)のローパスフィルタの極に相当するため、フィル タの時定数をできるだけ小さくすることで遅れの少ない推定値を得ることができる。し かし、実際にあまりに小さくしすぎると、観測ノイズや制御対象のモデル化誤差などの 影響を受け、正しい推定が行えなくなるためその決定にトレードオフは避けられない。 また、本手法では、図2.3(b)の等価ブロック図として図 2.3(c)を用いる。 (a) (b) (c) 図2.3 外乱オブザーバのブロック図 P Pn-1 iref y d + + d P Pn-1 iref y d + + d y P Pn-1 iref+ d + Fd dˆ y P Pn-1 iref+ d + Fd dˆ y P Pn-1 iref+ d + Fd dˆ y P Pn-1 iref+ d + Fd dˆ P Pn iref y d + + Fd×Pn-1 dˆ P Pn iref y d + + Fd×Pn-1 dˆ 10
2.2.2 DIMC(外乱オブザーバに基づく内部モデル制御)
DIMC の基本的なブロック図を図 2.4 に示す。ここでは、IMC 制御系に外乱やモデル化 誤差に対する一形の制御系を保証するために外乱オブザーバを導入する。外乱オブザーバ の制御構成も、IMC に極めて類似しており、ならびにオープン駆動型という特長を最大限 発揮可能である。ここで、F
dは外乱オブザーバ用フィルタである。また図2.4 に示したブ ロック図からも確認できるように、外乱オブザーバも制御対象の出力とモデルの出力の差 が生じた場合のみ、外乱推定を行いフィードバック制御する構成である。また設計パラメ ータは制御帯域幅を指定するだけでよい。制御器の離散化においても、IMC および外乱オ ブザーバで同一のもの( 1 n FP とP
n)を用いればよいので、実現が容易である。ここで、 𝑢:制御入力、𝑢𝑓:直列補償器(FPn1)の出力、𝑦𝑑:モデル出力、𝑢𝑑:外乱推定値とす る。 ここではDIMC の目標値応答および外乱応答について考える。 図2.4 より、このシステムの入出力関係はd
PP
F
F
P
F
r
PP
F
F
FPP
y
n d d d n d d n 1 1 11
)
1
(
1
(2.2.3) となり、(2.1.8)式が外乱オブザーバに基づく内部モデル制御系の目標値と外乱に対する伝 達関数である。ここでIMC と同様にP
nに積分特性がある場合とない場合を考えてみる。 (2.2.3)式はd
P
F
r
F
y
(
1
d)
(2.2.4) となり、さらにフィルタを 1)
1
(
1
)
1
(
n do do ds
s
n
F
(2.2.5) とおくことで伝達関数が1/snの外乱にも対応することができる。 また外乱オブザーバのフィルタを調整することで外乱補償を行う方法について述べる。 F≠Fdのときの入出力関係はr
PP
F
F
FPP
F
F
FPP
y
n d n d n 1 1 1)
1
(
)
1
)(
1
(
d
PP
F
F
FPP
F
F
P
F
F
n d n d d 1 1)
1
(
)
1
)(
1
(
)
1
)(
1
(
(2.2.6) P=PnのときPd
F
F
Fr
y
(
1
)(
1
d)
(2.2.7)11 となる。つまり直列補償器に含まれるフィルタ F は変更せず、外乱オブザーバのフィルタ Fdを変更することで、目標値応答および外乱応答に対して定常偏差なく追従し、オーバー シュートも発生しない。 例えば、外乱の伝達関数が1/snであれば、フィルタFdは次のように調整することで定常 偏差なく目標値に追従することができる。 1
)
1
(
1
)
1
(
n do do ds
s
n
F
(2.2.8) これらより、DIMC と IMC の外乱応答を比較するために外乱を入れてシミュレーション を行った結果を図2.5 に示す。ここで、外乱オブザーバ用のフィルタの帯域幅は、IMC フ ィルタと同じ2π×30rad/s とした。比較のため、IMC、IMC-PID の応答も同時に示す。 ここで制御対象は)
p
s
(
s
k
)
s
(
P
1 1
とし、制御対象に積分特性を含む場合を考える。この時、P=Pnとする。0.2s でステップ外 乱を入力の10%相当印加している。 図2.5 より、IMC では外乱による定常偏差が残っているのに対して、DIMC は外乱によ る定常偏差が残らなかった。またドロップ量もIMC に比べると DIMC の方が小さい。これ はDIMC には微分特性が残るために外乱による定常偏差が残らない。 図2.4 外乱オブザーバに基づく内部モデル制御系
F
d・P
n1P
nP
+
disturbance observer
F・P
n1+
f
u
u
controller
r
plant
plant model
d
u
y
d
d
y
F
d・P
n1P
nP
+
disturbance observer
F・P
n1+
f
u
u
controller
r
plant
plant model
d
u
y
d
d
y
12
(a)ステップ応答波形
(b)外乱の周波数特性
図2.5 DIMC と IMC と IMC-PID の比較
0
0.1
0.2
0.3
0.4
0.5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time [s]
IMC-PID DIMC IMC IMC-PID DIMC IMCO
u
tp
u
t
0
0.1
0.2
0.3
0.4
0.5
0
0.1
0.2
0.3
0.4
0.5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time [s]
IMC-PID DIMC IMC IMC-PID DIMC IMCO
u
tp
u
t
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
M
ag
n
it
u
d
e
(d
B
)
10
0
101
10
2
10
3
10
4
Frequency (rad/sec)
IMC-PID DIMC IMC IMC-PID DIMC IMC-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
M
ag
n
it
u
d
e
(d
B
)
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
M
ag
n
it
u
d
e
(d
B
)
10
0
101
10
2
10
3
10
4
Frequency (rad/sec)
10
0
10
0
101
101
10
10
2
2
10
10
3
3
10
10
4
4
Frequency (rad/sec)
IMC-PID DIMC IMC IMC-PID DIMC IMC13
第3章
DIMC の適応化手法
3.1 DIMC の適応化
離散モデルベースのDIMC の実現化においてまず、DIMC の適応化について簡単に記述 する。制御対象とそのノミナルモデルとの間にモデル化誤差が存在する場合、システムの 応答は劣化してしまう。しかし、現実的にはモデル化誤差が存在しないシステムは存在し ない。そこで、制御器に含まれる制御対象のモデルに対して適応機構を導入することが望 ましい。これにより、経年劣化による制御器のパラメータの再チューニングを行う必要が なくなり、保守・コストの面でも有益である。 制御器の適応化にあたっては以下の4つの手順を繰り返す。 しかし、常時チューニングを行った場合、過渡応答に対する出力応答は悪化する。これ は式(3.1.1)および、式(3.1.2)が、定常状態で目標値応答がフィルタの応答となるからである。d
s
P
s
F
r
s
F
y
(
)
(
1
(
))
2(
)
(3.1.1)d
P
F
r
F
y
(
1
d)
(3.1.2) したがって、パラメータの更新は定常状態で行わなければならない。また、Step2 において、 離散モデルの初期値を収束値に近づけることで、パラメータ推定値の収束時間を短縮する ことができる。 図3.1 は DIMC の適応化を図示したものである。 ※P
nf
P
ndのとき定常状態で目標値応答はStep 1: 制御対象の入出力信号を測定
Step 2: 入出力データを用いて,離散モデルの
逐次最小二乗(RLS)法で同定
Step 3: 離散時間モデルを連続時間モデルに
変換して制御対象のゲインと極を推定
Step 4: 同定で得られた極とゲインを用いて、
コントローラを更新
14
r
k
P
P
y
nf nd
(3.1.3) となるため、モデルのミスマッチを補正するゲインk
を導入する。 図3.1 DIMC の適応化)
0
(
)
0
(
1
nf
nd
a
P
P
k
補正ゲイン:
k
a
P
nf
(
0
)
P
nd
1
(
0
)
補正ゲイン:
+ + P +y
r
disturbance observer
F・Pnf1 k a VFF-RLS identification Pnd Fd・Pnd1d
u
)
0
(
)
0
(
1
nf
nd
a
P
P
k
補正ゲイン:
k
a
P
nf
(
0
)
P
nd
1
(
0
)
補正ゲイン:
+ + P +y
r
disturbance observer
F・Pnf1 k a VFF-RLS identification Pnd Fd・Pnd1d
u
15
3.2 離散モデルベースの DIMC の実現
3.2.1 離散ベース化
図3.2 DIMC ブロック線図 図3.2 は第 2 章で説明した DIMC のブロック線図である。 前節のSTEP2 で説明したように逐次同定法などのシステム同定を行った場合まず、離散 モデルが得られる。次にシステム同定で求められた離散モデルは連続時間モデルに一度変 換され、制御シミュレーションや制御実験を行う際にまた離散モデルに変換されて実際に シミュレーションや実験を行う。 離散ベースDIMC の実現化によって、適応同定で求めた離散時間モデルを直接 DIMC に 導入することができる。直接導入することができれば、オンラインでの適応制御時の演算 を軽減することができる。しかしそのためには、プラントの離散化モデルが必要となり、 制御器のフィルタ、外乱オブザーバのフィルタ、ノミナルモデルを離散ベースで構築する 必要がある。 離散ベース化にあたって、制御器のフィルタ、外乱オブザーバのフィルタは とし、外乱オブザーバのフィルタをcontroller
plant
plant model
disturbance observer
n fs
s
F
)
1
(
1
)
(
τ
1)
1
(
1
)
1
(
)
(
n d ds
s
n
s
F
τ
τ
16 と考え、プラントの相対次数でフィルタの次数を決定し、試行錯誤的にフィルタの時定数
τ
を求めていた。よって、連続時間系ではフィルタを決定することはとても容易である。し かしこのままでは離散時間系に組み込むことができないので、この連続時間系のフィルタ にゼロ次ホールド変換(zoh 変換)を用いて変換をおこなう。 ゼロ次ホールド変換(zoh 変換)とは後退差分法より、連続時間信号x
(t
)
に対する積分演 算を長方形則により近似する手法である。例えば、現時刻をサンプル数のk
番目としたと きの0 からk
番目までの面積S(k)は以下の式となる。(
1
)
(
)
(
)
)
(
)
1
(
)
(
1k
x
T
k
S
z
k
x
T
k
S
k
S
s s
x
k
z
s
S
1
1
T
)
(
(k)
1 s
この変換式を用いることによって制御器のフィルタ、外乱オブザーバのフィルタはそれ ぞれ , と変換され、使用する。 n f f n fz
z
F
s
s
F
1 11
1
)
(
)
1
(
1
)
(
τ
1
1 1 1 11
1
3
1
2
)
(
)
1
(
1
)
1
(
)
(
n d n d d d d n d dz
z
z
F
s
s
n
s
F
τ
τ
f s f fT
τ
τ
d s d dT
τ
τ
Ts:サンプリング時間 時定数 τ τf, d:17
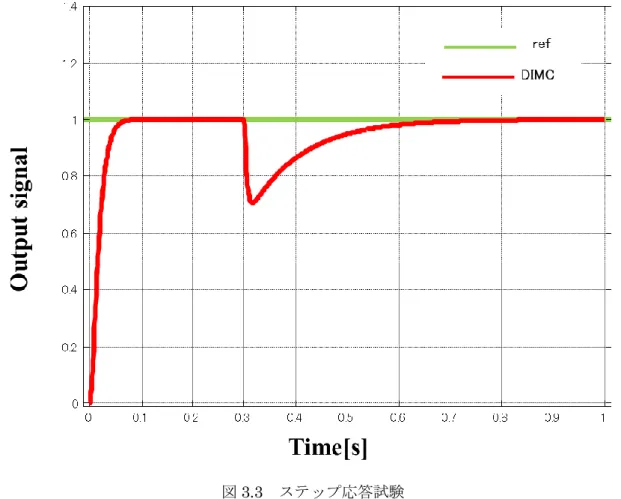
3.2.2 離散モデルベースの DIMC
シミュレーション条件は第2 章の条件と同じであるがノミナルモデルを離散時間モデル で用いているため、下記に示す。ちなみに、サンプリング時間は0.001s である。 2 1 1 18065
.
0
807
.
1
1
0005917
.
0
0006356
.
0
)
(
z
z
z
z
P
n プラントの相対次数からフィルタはλ
λ
2 1 11
1
)
(
z
z
F
となる。 図3.3 は離散モデルベースの DIMC の実際にステップ応答試験をしたものである。第 2 章のDIMC の応答よりオーバーシュートがなく、また、外乱に対して定常偏差なく追従で き、外乱に対して補償できていることが確認できる。このシミュレーションから、離散モ デルベースのDIMC の実現の有効性が確認できる。18
19
第 4 章
DIMC へのデータ駆動型適応同定の導入
4.1 データ駆動型適応同定法
4.1.1 データ駆動型 IMC
本研究では、現在盛んに研究が行われており、非線形特性を有する制御対象に対しても 良好な結果が得られるデータ駆動型IMC の適応部分に着目し、離散モデルを構成する適応 化手法の一つとして提案する。 データ駆動型手法は、過去の入出力データをデータベースに蓄積し、必要(要求点)に応じ て現在のデータと類似したデータを近傍として取りだし、局所モデルを構成するものであ る。さらに、構成した局所モデル新たにデータベースに追加していくことで、システムパ ラメータの変動や、目標値変更に対しても望ましい応答が得られる。 図4.1 はデータ駆動型 IMC のブロック線図を表す。また、図 4.2 はデータ駆動型の簡単 なアルゴリズムを図として表す。20 図4.1 データ駆動型 IMC ブロック線図 図4.2 データ駆動型手法アルゴリズム
P(s)
Database
Data-Driven
Modeling Method
Pn(s)
y(t)
r(t)
ˆ
)
(
ˆ t
y
+
-u(t)
+
-e(t)
1)
(
s
Pn
F・
過去の入出力データをデータベースに蓄積
過去の入出力データをデータベースに蓄積
必要
(要求点)に応じて現在のデータと
類似したデータを近傍として取り出す
必要
(要求点)に応じて現在のデータと
類似したデータを近傍として取り出す
局所モデルを構成
局所モデルを構成
構成した局所モデルを新たにデータベースに追加
構成した局所モデルを新たにデータベースに追加
システムパラメータの変動や、目標値変更に対して
も望ましい応答が得られる
システムパラメータの変動や、目標値変更に対して
も望ましい応答が得られる
21
4.1.2 データ駆動型手法アルゴリズム
先述したアルゴリズムを具体的な式として記述する。[STEP1] 初期データベースの講築
データ駆動型手法では過去の実験データが存在しない場合は原理的に同定を行うことが できない。よってまず、過去の入出力データを用いて、次式のようなデータベースを構築 する必要がある。)
0
(
,...,
2
,
1
)]
(
[
:
)
(
_N
j
j
j
φ
Φ
(5.1.1))
2
.
1
.
5
(
)]
1
(
),...,
1
(
),
1
(
),...,
(
[
:
)
(
φ
t
y
t
y
t
n
y
u
t
u
t
n
u
N(0):初期データ数(初期データベースにおける情報ベクトルの数) 今回2 次モデルでの同定を行うので、n
y
3
,
n
u
3
とする。[STEP2] 近傍データの選択
次に距離の計算として次式のような、おもみつきL1 ノルムから、要求点(t
)
φ
とデータベー スに蓄えられている情報ベクトル( j
)
φ
との距離をもとめる。)
3
.
1
.
5
(
)
(
,...,
2
,
1
)
(
min
)
(
max
)
(
)
(
))
(
),
(
(
1 1 _ _ _ _ _ _φ
φ
φ
φ
φ
φ
t
N
j
m
m
j
t
j
t
d
u y n n l l m l m l l j
も小さな要素
番目の要素の中で、最
の
φ
ての情報ベクトル
データベースにある全
φ
も大きな要素
番目の要素の中で、最
の
φ
ての情報ベクトル
データベースにある全
φ
番目の要素
における要求点の第
時刻
φ
番目の要素
第
番目の情報ベクトルの
第
φ
l
t
N
j
j
m
l
t
N
j
j
m
l
t
t
l
j
j
l l m l l m l l))
(
...,
2
,
1
),
(
(
:
)
(
min
))
(
...,
2
,
1
),
(
(
:
)
(
max
:
)
(
:
)
(
_ _
22 この式から算出した値は、局所モデルを構成する中での重みの計算、また、データベー スの更新における判断基準として利用する。 そもそも、近傍データとは要求点と類似した情報を持ったデータベース内のデータのこ とである。この近傍データは次式の条件を満たす情報ベクトル群として定義される。
)
4
.
1
.
5
(
)
(
,...,
2
,
1
2 2α
t
N
j
du
dy
dis
j
j
j
ここで、αは要求点と情報ベクトルの類似度を表す設計パラメータである。また、dy ,
jdu
j は以下の式で与えられる。 y n l l m l m l l jn
m
m
j
t
j
t
dy
yφ
φ
φ
φ
φ
φ
1 _ _ _ _ _ _max
(
)
min
(
)
)
(
)
(
))
(
),
(
(
(5.1.5)1
)
(
min
)
(
max
)
(
)
(
))
(
),
(
(
1 1 _ _ _ _ _ _
u n n n l l m l m l l jn
m
m
j
t
j
t
du
u y yφ
φ
φ
φ
φ
φ
(5.1.6) 以上の条件を満たす情報ベクトルk(t)個が、近傍データとして選択される。[STEP3] 局所モデル
STEP2 において選定された近傍データに対して、重みつき局所平均法( Linearly Weighted Average : LWA)を元に、局所モデルを構成する。まず、それぞれの近傍に対す る加重を算出する。
k i i i id
d
w
1)
exp(
)
exp(
(5.1.7)クトルが保有する重み
番目の近傍内の情報ベ
選択された第i
w
i:
23 重みが求まったところで、さらに次式により時刻tにおける局所モデルを構成するパラメ ータを決定する。
VY
V
t
Φ
TΦ
Φ
Tθ
ˆ
(
)
(
ˆ
ˆ
)
1ˆ
(5.1.8) T ik iy
y
Y
:
[
1,...,
]
(5.1.9)]
,...,
[
:
diag
w
i1w
ikV
(5.1.10) 以上の計算式から、局所モデルを構成するパラメータを導出する。)]
(
ˆ
),
(
ˆ
),
(
ˆ
),
(
ˆ
[
:
)
(
ˆ
1 0 2 1t
a
t
b
t
b
t
a
t
θ
(5.1.11) このパラメータを次式に適用することで、内部モデル出力が得られる。)
2
(
)
1
(
)
2
(
ˆ
)
1
(
ˆ
)
(
ˆ
t
a
1y
t
a
2y
t
b
0u
t
b
1u
t
y
(5.1.12) また、得られる局所モデル(ノミナルモデルの離散時間系)は 2 2 1 1 1 1 0 1
)
(
)
(
1
)
(
)
(
)
(
z
t
a
z
t
a
z
t
b
t
b
z
P
n (5.1.13) となる。[STEP4] データベースの更新
実システムへの応用を考えた場合、本手法にはサンプリング時間内にSTEP2、STEP3 の手順を行わなければならない時間制約がある。時間な短縮のために、データベースの更 新を行うか判定し、さらに、更新する場合は情報ベクトルをデータベースに追加するのか 上書きするのか決定する。 まず、次式にあるようにシステム出力y(t)と内部モデル出力y
ˆ t
(
)
との誤差に着目する。 この誤差が大きくなり次式の条件を満たす場合、つまり、時刻tにおける局所モデルが構成 されなかったならば、要求点付近の適した情報ベクトルがデータベースに存在しないと判 断しデータベースの更新を行う。 1)
(
ˆ
)
(
t
y
t
y
(5.1.14)24 次に、近傍データを除いたデータベース内の情報ベクトルと要求点との距離に着目する。 STEP2 で用いた(5.1.3)式より、近傍データを除くデータベース内の最も近しい情報ベクト ルと要求点間の距離が次式の条件を満たす場合、その情報ベクトルは要求点によって上書 きされる。 2 _ _
))
(
),
(
(
t
i
d
jφ
φ
k
t
N
i
1
,
2
...,
(
)
(5.1.15) (5.1.15)式を満たさない場合、新たなデータとしてデータベースに加えられる。 ここで、(5.1.14)式、(5.1.15)式に含まれる設計パラメータ
1,
2と、STEP2 の近傍デー タを抽出するパラメータ
は、ある正定数で与えられる設計パラメータを表す。これらの パラメータの設定は試行錯誤的である。 STEP4 より、冗長なデータが削除されデータの過剰な増加を抑制することができる。こ のSTEP4 の後、STEP2 へ戻り以上のアルゴリズムを繰り返す。25
4.1.3 シミュレーション結果
実際にデータ駆動型適応同定法を用いて同定実験を行い、その妥当性を検証する。同定 入力、同定条件ともに、逐次型適応同定で用いたものと同じである。設計パラメータはそ れぞれ、
0
.
4
,
1
0
.
1
,
2
2
とする。得られる局所モデルの最終値形は となる。 図4.3 は近傍データの選択を表す。閾値から大きく離れた値などを考慮し、保持しつつ誤 差に対し適応化していく。図4.4 は逐次型適応同定のパラメータ推移から定常 100 個をと って真値とした係数パラメータから構成した離散モデルのbode 線図(青)、逐次型適応同 定で求めた最終値の係数パラメータから構成した離散モデルのbode 線図(マゼンタ)、デ ータ駆動型適応同定で求めた最終値の係数パラメータから構成した離散モデルのbode 線図 (赤)の比較を行ったものである。 表4.1 は同定実験より得られたパラメータを真値とした係数パラメータとデータ駆動型 適応同定によって求めた係数パラメータを比較し、絶対値誤差を求めたものである。この 結果からわかるように、データ駆動型適応同定手法のbode 線図は逐次最小二乗法と比較し、 より一致していることが確認できる。また、絶対値誤差が小さく良い結果が得られた。こ の実験より、データ駆動型適応同定の妥当性が検証できた。 2 1 1 17073
.
0
1298
.
1
1
9557
.
0
1692
.
3
)
(
z
z
z
z
P
最終値モデル
26 図4.3 近傍データ選択 図4.4 bode 線図比較 0 200 400 600 800 1000 1200 0 0.1 0.2 0.3 0.4 0.5 0.6
データ数
閾値
α
0 200 400 600 800 1000 1200 0 0.1 0.2 0.3 0.4 0.5 0.6データ数
閾値
α
データ数1280
103 104 105 106 -5 0 5 10 15 20 25M
a
g
ni
tu
de
(d
B)
Frequency (rad/sec)
DD(最終値)
真値
逐次(最終値)
103 104 105 106 -5 0 5 10 15 20 25 103 104 105 106 -5 0 5 10 15 20 25 -5 0 5 10 15 20 25M
a
g
ni
tu
de
(d
B)
Frequency (rad/sec)
DD(最終値)
真値
逐次(最終値)
27 表4.1 係数パラメータ比較
4.0
0.9557
0.9958
0.13
3.1692
3.165
1.3
0.7073
0.7163
1.5
-1.1298
-1.147
絶対誤差(%)
Data-Driven型(最終値)
真値
係数
4.0
0.9557
0.9958
0.13
3.1692
3.165
1.3
0.7073
0.7163
1.5
-1.1298
-1.147
絶対誤差(%)
Data-Driven型(最終値)
真値
係数
2
1
2
1
ˆ
ˆ
ˆ
ˆ
b
b
a
a
28
4.2 データ駆動型適応化手法の DIMC への導入
4.2.1 データ駆動型適応化 DIMC 概要
前節までのDIMC のシミュレーション検証では制御対象と対象からシステム同定などで 得られるノミナルモデルとの間にモデル化誤差が存在しない、つまりP = Pnの場合を想定 しておこなってきた。しかし、実際のシステムへ応用することを考えると摩擦特性や経年 変化により得られたノミナルモデルが制御対象と一致しないモデル化誤差が存在する、つ まりP ≠ Pnの場合がある。そこで、データ駆動型適応化手法をDIMC に導入することに よって、モデル化誤差をデータ駆動型適応同定法で補償することができる。また、外乱に 対しては外乱オブザーバが補償をおこなうので、 P ≠ Pn の場合でも目標値に対してより 有効な制御をおこなうことができる。 外乱オブザーバはもともとモデル化誤差と外乱を保証し外乱オブザーバのモデル Pnd(s) をP(s) に近づける効果を持っている。それゆえに、Pnd(s) の適応化は重要ではない。よっ て、図4.5 のように同定する対象を外乱オブザーバと制御対象にし、フィードフォワードの ノミナルモデル Pnf(s) だけ適応させる。結果として、オープンループで同定することがで きるのでオンラインのプロセスでさえも正確な同定が可能である。29 図4.5 データ駆動型適応化 DIMC ブロック線図
入力
制御入力
出力
内部モデル出力
構成式
外乱
30
4.2.2 シミュレーション結果
シミュレーション条件を表4.2 に示し、制御対象の離散モデルを以下とする。 この条件よりシミュレーションをおこなった結果を図4.6、図 4.7 に示し、表 4.3 に得ら れた局所モデルの構成パラメータの制御対象の離散パラメータとの誤差を示す。この結果 より、目標値に対しオーバーシュートなく、外乱に対しても定常偏差なく追従できている ことが確認できる。さらに、モデル構成パラメータに関して目標値の変動があった場合で も、制御対象に対し誤差が少なく高精度な同定ができていることが確認できた。 次に、モデル化誤差に対するデータ駆動型適応化DIMC の影響を検証するためにまず、 モデル化誤差ある場合のDIMC について、制御対象の極およびゲインを各 30%増減させ、 そのときのステップ応答波形を図4.8 に示す。ゲインを 30%減らした場合、整定速度は速 くなるがオーバーシュートが発生した。しかし、ゲインを 30%増やした場合、追従速度は 遅くなった。また、極を30%減らした場合追従速度は遅くなり、極を 30%増やした場合は オーバーシュートが発生した。いずれの結果も極およびゲインを変動させると出力応答は 悪化した。このため出力応答の性能向上には、高精度な制御対象のモデルが必要不可欠で あり制御系に適応機構を導入する必要があることがわかる。 同条件下の場合のデータ駆動型適応化DIMC についてシミュレーションをおこなったス テップ応答波形を図4.9 に示す。また、DIMC とデータ駆動型適応化 DIMC の目標値に対 する二乗誤差和を表4.4、表 4.5 に示す。この結果より DIMC のときと同様にゲイン 70%、 極130%の場合にオーバーシュートが発生し、ゲイン 130%、ゲイン 70%の場合に応答の遅 れが発生したが、二乗誤差和を比較するとDIMC の場合よりデータ駆動型適応化 DIMC の 場合の方が、二乗誤差和が少なく、より目標値に対し追従していることが確認できる各モ デル化誤差において、データ駆動型適応化DIMC は制御器のモデル更新をおこなうことで 制御対象の状態変化に対してもロバスト性を有していることが確認できた。31 表4.2 シミュレーション条件 表4.3 更新パラメータ (a) 制御入力信号 (b) 出力信号 図4.6 入出力信号
サンプリング時間
データ数
時定数
設計パラメータ
ステップ外乱
設計パラメータ
外乱印加時間
設計パラメータ
対象モデル
最終値
絶対誤差(%)
1.716
1.7136
-0.716
-0.7138
1.08
0.769
0 1 2 3 4 5 6 7 8 9 10 -500 -400 -300 -200 -100 0 100 200 300 400 500 Time[s] Input [ co unt s] 0 1 2 3 4 5 6 7 8 9 10 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 Time[s] O ut put [ co unt s]32 (a) パラメータ a1 (b) パラメータ a2 (a) パラメータ a1 (b) パラメータ a2 図4.7 更新モデルパラメータ 表4.4 二乗誤差和比較(極増減) 表4.5 二乗誤差和比較(ゲイン増減) 0 200 400 600 800 1000 1200 1400 1600 1800 2000 1.7158 1.7158 1.7159 1.7159 1.716 1.716 1.7161 1.7161 1.7162 データ数 thet ah at [ co unt s] 1 0 200 400 600 800 1000 1200 1400 1600 1800 2000 -0.7163 -0.7162 -0.7162 -0.7161 データ数 thet ah at [ co unt s] 2 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2.7511 2.7512 2.7513 2.7514 2.7515 2.7516 2.7517 2.7518 2.7519 2.752x 10 -4 データ数 thet ah at [ co unt s] 3 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2.4612 2.4613 2.4614 2.4615 2.4616 2.4617 2.4618 2.4619 2.462x 10 -4 データ数 thet ah at [ co unt s] 4
DIMC(70%)
DIMC(130%)
DD-DIMC(70%)
DD-DIMC(130%)
二乗誤差和
0.0597
0.0291
0.0056
0.0057
DIMC(70%)
DIMC(130%)
DD-DIMC(70%)
DD-DIMC(130%)
33 (a) ゲイン増減 (b) 極増減 図4.8 DIMC ステップ応答試験 0 1 2 3 4 5 6 7 8 9 10 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 Time[s] O ut put [ co unt s] 130% 70% 100% 0 1 2 3 4 5 6 7 8 9 10 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 Time[s] O ut put [ co unt s] 130% 70% 100%
34 (a) ゲイン増減 (b) 極増減 図4.9 DD-DIMC ステップ応答試験 0 1 2 3 4 5 6 7 8 9 10 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 Time[s] O ut put [ co unt s] 130% 70% 100% 0 1 2 3 4 5 6 7 8 9 10 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 Time[s] O ut put [ co unt s] 130% 70% 100
35
第
5 章データ駆動型適応化 DIMC 有効性検証
5.1 精密ステージへの応用
5.1.1 精密ステージ
本研究に用いた実験装置の構成図を図 5.1 に示す。ホスト PC から送られた入力指令は PCI スロットに装着したパラレル IO カードを利用して、サーボインターフェスユニット (モーションコントローラ)、アンプを通して SPIDER に送信される。ここのアンプにお いて入力指令電圧は130/10 倍(以下 13 倍)されて送られる。また、エンコーダ及びリミ ットセンサよりステージの位置情報ストロークリミット情報が読み込まれ、ホスト PC に 送られる。 ステージシステムの写真を図5.2 に、アクチュエータ拡大図を図 5.3 に示す。位置を測定 するためにリニアエンコーダがステージ稼動部の下面に取り付けてある。また、ステージ の仕様を表5.1 に示し、また圧電素子の性能表を表 5.2 に示す。圧電素子の静的な発生力は 最大伸縮素子発生力660N(4脚同時)となる。予圧力が 50N、摺動面の摩擦力が 15N で あることから足の運動に十分な駆動力が得られている。また、ガイドプレートの平均表面 粗さが約0.2μm であることから、伸縮方向に 39V のオフセット電圧を印加することで表面 粗さの影響を軽減している。Linear encoder
Linear
guide
Limit
sensor
SPIDER
Stage
Scale
PC
Motion controller
with servo system
control input
position
signal
operatorlimit
signal
Guide
Plate
36 図5.1 ハードウェア構成図 図5.2 精密ステージ 図5.3 アクチュエータ部拡大図 表5.1 ステージの仕様 可動部質量 1kg 駆動周波数設定 1~60kHz 最大推力 13N 最大印加電圧 ±130V ストローク 100mm 位置分解能 100nm 表5.2 アクチュエータ(SPIDER)の仕様 材質 PB(Zr,Ti)O3 密度 7.8×103kg/m3 伸縮率 660×10-12m/V 剪断率 1010×10-12m/V 積層枚数 4(伸縮)×4(剪断)