はじめに 1. 「世界基準」グローバル・スタンダードで歩行分析・動作分 析を考える 国家試験に床反力や関節モーメントが出題されるなど,日本 の卒前教育の水準は世界的に見ても高い。しかし,その内容を 理解し,理学療法に応用できているかの水準については,疑問 視せざるを得ない。 1992 年,ランチョロスアミーゴス国立リハビリテーションセ ンター(Rancho Los Amigos National Rehabilitation Center; 以 下,RLANRC) の 医 師,Jacquelin Perry に よ る“GAIT ANALYSIS ̶ normal and pathological function ̶ (SLACK)” で示された歩行分析の定義,メカニズムは,世界的に認知され ており1),Journal of Biomechanics,Gait and Posture といっ た国際学術誌でも広く用いられている。同時に,観察による歩 行 分 析(Observational Gait Analysis) の 講 習 会 が RLANRC に お い て 開 催 さ れ て き た。 本 邦 で は,2003( 平 成 15) 年, Kirsten G tz-Neumann が来日し,最初の講習会が開催されて 以来,テキストの日本語訳(観察による歩行分析,月城慶一他 訳 医学書院)により,最近 10 年間で普及してきた2)。 次項で詳細を解説するが,この観察による歩行分析法は, ①科学的根拠に基づき,②理学療法に応用可能な分析が,③効 率的に行える点で優れている。
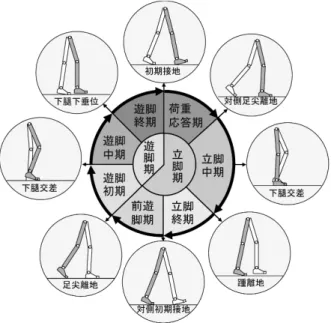
観察による歩行分析(Observational Gait Analy-sis)における歩行周期 まず,基本事項として RLANRC の歩行周期を確認する(図 1)。 立脚期 1. 初期接地(Initial Contact;以下,IC):観測肢の接地の 瞬間 2. 荷重応答期(Lording Response;以下,LR):IC から対 側爪先離地まで 3. 立脚中期(Mid Stance;以下,MSt):対側爪先離地から 対側下腿下垂位まで 立脚中期前半:対側爪先離地から両下腿の交差まで 立脚中期後半:両下腿交差から対側下腿下垂位まで 4. 立脚終期(Terminal Stance;以下,TSt):対側下腿下 垂位から対側 IC まで 5. 前遊脚期(Pre Swing;以下,PSw):対側 IC から観測 肢爪先離地まで 遊脚期 6. 遊脚初期(Initial Swing;以下,ISw):観測肢爪先離地 から両下腿の交差まで 7. 遊脚中期(Mid Swing;以下,MSw):両下腿交差から 下腿下垂位まで 8. 遊脚終期(Terminal Swing;以下,TSw):下腿下垂位 から IC まで 従来の歩行分析との相違点は,①歩行周期を踵接地(Heel Contact; 以 下,HC) 等 の 事 象(event) で 表 記 せ ず, 期 間 (phase)で表す点であり,さらに②対側下肢の挙動も併せて,
歩行分析・動作分析のグローバル・スタンダード
*
─最近の知見と治療に役立つ分析のポイント─
畠 中 泰 彦
**ランチョンセミナー
*The Global Standard of the Gait and Motion Analysis: The Updates and Check Points of Clinical Analysis for Physical Therapy
**
鈴鹿医療科学大学保健衛生学部理学療法学科 (〒 510‒0293 三重県鈴鹿市岸岡町 1001‒1)
Yasuhiko Hatanaka, PT, PhD: Department of Physical Therapy, School of Health Science, Suzuka University of Medical Science キーワード:歩行分析,動作分析,運動学
図 1 ランチョ・ロス・アミーゴ病院方式の歩行周期(J.
理学療法学 第 40 巻第 8 号 568 歩行周期の表記に用いる点である。この表記法には,観察結果 を文章化するうえでの利点が 2 点ある。たとえば尖足のように, 正常歩行の HC がみられない患者の表記では IC のアライメン トを記載するなど,正常歩行,異常歩行のいずれの場合でも共 通した記載が可能である点は,臨床上有用である。さらに IC は瞬間的な事象であるため,これを除き,立脚相を 4 相,遊脚 相を 3 相に区切っている。このうち MSt は,従来の定義の立 脚中期を挟み前半,後半に区切られる。すなわち立脚相 5 相, 遊脚相 3 相となるが,立脚期のうち,PSw は対側の LR に対応 するので,図 1 のように左右対称となっている。したがって, 歩行の対称性も容易に理解できる。 RLANRC の歩行分析には,前述のような利用価値の高い点が ある反面,あらかじめ理解,記憶すべき知識が多く,観察中, チェックすべき点も多い。したがって RLANRC では,学生を含 め,初心者の利用は勧めていない。この問題が,初心者が歩行分 析を学ぶうえで障壁となっていることは間違いない。歩行分析を 学ぶうえで求められる知識,技術は以下の 3 点に集約される。 1.関節の運動パターンを観察する能力 2. 正常な運動パターンのメカニズムを理解し,さらに観察 した運動パターンを運動学の専門用語を用いて記述する 能力 3. 患者の異常な運動パターンのメカニズムを運動力学的に 考察する能力 これらすべてが同時に学習できることが理想だが,初心者に とって「どこから学ぶべきか?」の問いに「全部一度に」とい う答えは,些か教育的ではないと考えられる。 まず,観察能力を高めるには,運動パターンをグラフ化する ことを推奨する3)。図 2 に例示された股,膝,足関節の角度変 化を記載する。記載のポイントは,屈曲,伸展の状態(過剰か? 不足か? 正常範囲内か?)が,紙面に再現できているかであ る。この時点で歩行周期と運動パターンが正確に一致する必要 はなく,股,膝,足関節の記載が終了した後,グラフを見なが ら,患者の運動パターンを模倣してみる。グラフの修正と運動 パターンの模倣を数回繰り返すと,検査者自身の頭の中で,患 者の運動パターンが再構成できる。 特に観察上の重要なポイントとして,荷重応答期(LR),立 脚終期(TSt)に注目する必要がある。立脚期に必要な機能は, LR における衝撃吸収と荷重の受け継ぎ,続く立脚中期(MSt) における単脚支持と対側下肢の振りだし,最後に TSt におけ る歩幅の制御の 3 点に集約される。MSt は LR の機能と重複, 依存している点が多く,分析のポイントはさらに絞りこむこと ができる。 LR における正常運動パターン(図 3a,b) ① IC における足関節0[°] の保持とこれに続く5[°] 底屈 ② IC に お け る 足 関 節 5[ °] 屈 曲 位 の 保 持 と こ れ に 続 く 15[°] 屈曲 TSt における正常運動パターン(図 4) ③ 対側 IC における股関節 20[°] 伸展,膝関節 5[°] 屈曲, 足関節 10[°] 底屈 多くの異常歩行で,①②③のいずれか,あるいはすべてにお いて,正常歩行からの逸脱がみられる。LR,TSt に問題点が 集約される理由を以下に述べる。 1.重心の上下移動(図 5) 歩行周期中,重心の高さがもっとも低くなる時期が,IC で 図 2 歩行中の関節角度と観察のタイミング 図 3a 初期接地における正常運動パターン 図 3b 荷重応答期における正常運動パターン
あることは自明である。IC を境として,重心の移動方向が逆 転するために必要な筋の作用は,対側下肢の TSt における後 方への蹴りだし(push off )と,これに続く観測肢の LR におけ る衝撃吸収である。ニュートンの第 2 法則に基づき,力が作用 している時点では加速度が変化し,これにより身体運動が起こ る。すなわち,IC の前に起こった前上方への力は,MSw の重 心の位置エネルギーを得るための仕事であり,続く TSw では 前下方への運動エネルギーに変換され,これが IC における衝 撃となる。この衝撃吸収には前脛骨筋,および大腿四頭筋の伸 張性収縮が貢献している。以上のように,身体の推進状態,衝 撃吸収状態を端的に観察できる時期が,LR,および TSt であ ることが理解できる。 2.支持面積とロッカー機能 2 足歩行には,二重振り子運動という特徴がある4)。これは 左右両脚の,立脚期における足関節足部を回転軸とした倒立振 り子運動,および遊脚期における股関節を回転軸とした振り子 運動を指す(図 6)。特に立脚期においては,身体が前進するに したがい,回転軸の前進がみられる。① IC から足底接地にい たる,踵を回転軸とした heel rocker,②足底接地から踵離地に いたる,足関節を回転軸とした ankle rocker,③踵離地から爪 先離地にいたる,MTP 関節を回転軸とした forefoot rocker の 3 つの回転軸を中心とした運動を総称して,歩行におけるロッ カー機能と定義されている。rocker の本来の意味は揺り子(揺 りかご・揺り椅子などについている弓形の底材)であるので, ankle は正確には rocker ではない。ロッカー機能実現の困難さ は,時々刻々と変化する狭い基底面上で回転軸を移動させ,同 時にその基底面が滑らないように荷重を加える点にある(図 7)。 正常歩行において,heel rocker,および forefoot rocker とほぼ 同時期となる LR,および TSt の終末期には床反力垂直成分が 最大となることからも,LR,および TSt がロッカー機能を端 的に観察できる時期であることが理解できる(図 8)。 3.遊脚期に必要な機能と TSt の運動パターン 至適速度(もっとも楽に歩くことができる速度)における定 図 4 立脚終期における正常運動パターン 図 5 歩行周期中の重心の上下移動 矢印の大きさ:重量に抗して身体をもち上げる力の大きさ 図 7 立脚期中の 3 つのロッカーと支持面積 図 6 歩行周期中の二重振り子運動 黒丸:回転軸 矢印:回転方向
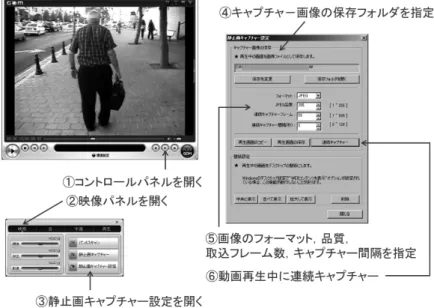
理学療法学 第 40 巻第 8 号 570 常歩行において,ISw の下肢の振りだしに大きな関節モーメン トは必要ない。下肢の振りだしに必要な股関節屈曲モーメント は,主として下肢の質量を利用した振り子運動によって賄われ, PSw における大腿直筋とこれに続く腸腰筋の張力によって生じ る関節モーメントはわずかで,収縮期間も約 100 ∼ 200[msec] と短い(図 9)。しかし,この効率的な正常運動パターンの生成 には,TSt における正常運動パターンが前提となる。すなわち, 対側 IC において股関節 20[°] 伸展,膝関節 5[°] 屈曲,足関節 10[°] 底屈に加え,踵が床から離れ,MTP 関節が 30[°] 背屈し たアライメントから PSw に向かってさらに背屈する必要があ る。この現象は,巻き上げ機構(windlass mechanism)と呼ば れる足底部を縦断する筋腱の張力の増大により,踵骨と MTP 関節部の距離を保持する。その結果,下腿三頭筋が脛骨の前傾, すなわち足関節の背屈を制御することに貢献する(図 10)。 動作分析にも使える動画再生,画像解析フリーソフト ウェア 初心者にとって,理解すべき点が多い問題は,知識を増やす こと以外で克服の方法はない。しかし,その前段階として,便 利なツールを使って観察のトレーニングを重ねることができれ ば,初心者のスキルアップも進められるのではないかと考え る。その際,以下に紹介するビデオ映像処理,解析用のソフト ウェアは有用となる。 1 歩行周期およそ 1 秒間に,LR,TSt の一瞬を捉えること は容易ではない。スロー再生や静止画像を抽出する機能,さら に関節角度等の計測機能が簡便に利用できれば,効率的に学習 できる。特筆すべきは,これらの機能がすべて無料でインター ネット上から入手できる点である。 1.動画再生ソフトウェア「GOM Player」5) このソフトウェアの利用価値が高い点は, ①対応するファイル形式が豊富である;iPhone 等のスマー トフォンで撮影した動画も含め,主要なフォーマットの動画 ファイルが再生,変換可能である。すなわち専用のビデオカメ ラ等は不要で,臨床業務の中で簡便に撮影が可能となる。 ②スロー再生も Microsoft Windows の標準ビデオ再生ソフ トウェア(Windows Media Playe;以下,WMP,動画のファ イル形式は Windows Media Video;WMV)より細かな設定が 可能である;初心者の観察トレーニング用途には,再生速度を 任意に変更させる機能が便利である。WMP で選択可能な低速 再生速度は1種類のみとなっている。一方 GOM Player では, 0.2 倍から 16 倍速まで 0.1 倍毎の調節が可能となっている。 ③動画→連続静止画変換機能も装備;従来,この機能は専用 の単一機能ソフトウェアである「AVI2BMP」を使用していた。 GOM Player 上では,AVI 形式を含む動画の連続静止画変換が 可能である。 以上,GOM Player の使用により,角度等の計測以外の基本 的な観察,分析作業がすべて可能となっている。 GOM Player の基本的な使用方法を以下に示す(図 11)。 ① 再生速度の調節:コントロールパネル(F7)を開く→再 生パネルを開く→再生速度の調節 ② 連続静止画への変換:コントロールパネル(F7)を開く→ 映像パネルを開く→静止画キャプチャー設定を開く→キャ プチャー画像の保存フォルダを指定→画像のフォーマット (jpeg または bmp),品質(解像度),取込フレーム数,キャ プチャー間隔(0 の場合,30 Hz,歩行分析ではこれ以上 間隔を大きくするとコマ落ちの問題が発生するため,通常 は 0)→ GOM Player を再生→連続キャプチャー開始 ③ 変換した静止画フォルダを開き,windows フォトビュー アー等で確認する。さらに 1 歩行周期を抽出するため,IC ∼ IC の画像を確認し,前後の余分な画像を削除する。こ れにより次の解析作業の省力化が図れる。 図 8 荷重応答期,立脚終期の床反力垂直成分 図 9 歩行周期中の関節モーメント 網掛け:前遊脚期 図 10 forefoot rocker と巻き上げ機構,足関節の制御
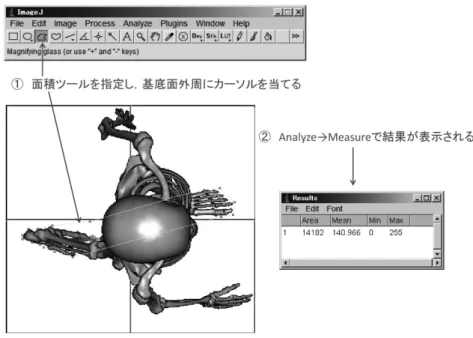
2.画像解析ソフトウェア「Image-J」6) Image-J はかつて米 NIH が無償配布していた汎用の科学画像 分析ソフトウェア NIH Image の後継モデルである。顕微鏡画 像,電気泳動の画像処理など各方面の科学者が開発したプラグ インも無料で入手できる点も,このソフトの秀逸な点となって いる。処理可能なファイル形式は,jpg,bmp であり,作業す る前に GOM Player 等の動画編集ソフトウェアを用いて,動画 ファイルを連続静止画に変換しておく必要がある。 Image-J で歩行分析に利用可能なパラメータとしては,座標, 角度,直線の傾き,面積などがある。 Image-J の基本的な使用方法を以下に示す(図 12)。 ① File → Open で先頭の画像ファイルを開く。 ② 上段のリボンの中から角度ツールを選択し,任意に関節点 を指定する。例では左脚の膝関節内反角度を計測してい る。リボンの下に計測値が表示される。
③ Analyze → Measure で結果が別ウインドウ(Results)に 表示される。
④ 同一フォルダ内の画像ファイルは,File → Open next コ マンドで連続して処理が可能であるので,歩行周期中の関 節角度変化も捉えることができる。 さらに Image-J は面積の計算方法も数種類備えており,松葉 杖,足底を直線でつないで支持基底面積を算出することも容易 に可能である(図 13)。 計算された数値データは,そのまま Microsoft Excel で開く ことができる。さらに計測した座標,角度は一般的なビデオ形 式であれば,1/30 秒毎の時系列データとして取り扱うことが できる。単純には最初の画像で 60[deg] であった関節角度が, 次の画像で 70[deg] であれば,この間の平均速度は 10 × 30 = 300[deg/sec] となる。さらに Microsoft Excel 上で,微分,あ るいは移動平均法,あるいは関数近似の機能を用いて,より正
図 11 GOM Player の操作方法
理学療法学 第 40 巻第 8 号 572 確な速度,角速度を計算することも可能である。また臨床歩行 分析研究会のシェアウェアである“cogm.exe”を用いて身体 重心を計算し,バランス機能の評価に利用することもできる。 「観察から分析へ」理学療法士自身のトレーニング; まず自分がなにを知りたいか,それをいかにして測る か,難易度も含め,理解する 計測器の利用には,数学,物理学の知識が十分にないと, まったくお手上げだと最初からあきらめている人も多いが,大 きな誤解である。観察による歩行分析,および計測機器を用い た歩行分析,いずれにおいても検査者がもつべき視点は基本 的に同じはずである。「必要な機能を障害している因子はなに か?」を理解することに尽きる。相違点は分析を進めていった 際,どこまで詳細に,正確に現象が捉えられるかである。逆に, 観察,あるいはビデオカメラで捉えられる現象は,数千万円の 計測システムを導入する価値がない。 詳細な分析をするためには,計測パラメータと,それを反映 する機能を理解する必要がある。詳しくは「臨床歩行計測入門 (医歯薬出版)」等の専門書を利用すべきだが7),工学的知識も 必要であるため,独学で会得することは難しい。やはり,大学 院等で学習すべきである。 分析結果の考察,仮説の検証には,異なる複数の動作の分析 結果の整合性を再考察する。たとえば大腿四頭筋筋力発揮に 問題がある場合,歩行においては LR での膝関節の過剰な屈曲 (giving way, wobble)が観察されるはずである。一方,立ち 上がりにおいて必要な観察モーメントは,歩行時のそれを大き く上回る。したがって,体幹あるいは上肢による代償は,より 顕著に見られるはずである。さらに,この傾向は階段を登る際 に,さらに強まると考えられる。もしこれらの総合的な判定に 不整合があれば,仮説が間違っているか,観察結果に誤りがあ ると考えられるため,再観察,分析が必要であることが理解で きる。 動作分析のスキルアップのためには当然ながら,観察→分析 →介入(理学療法)→観察の繰り返しが必要となる。ここで重 要な点は,視点を固定化せず,治療手技・手法にこだわらない ことである。「自分にはなにができるのだろう?」がスタート では,視点のマンネリ化は必至である。実際はうまくいかない 時も多いが,その時こそ自分自身のレベルアップのチャンスと 発想を転換するべきである。 おわりに 再び,本稿の読者には「何が分かると患者の治療に役立つ か?」を考え,周囲の理学療法士と議論していただきたい。本 稿で述べてきた観察のレベルの問題なのか,分析のレベルの問 題なのか,検証(介入)の方法(強度,回数,頻度,治療期間 等)のレベルの問題なのかを考える契機になれば幸いである。 かつてノーベル物理学賞受賞者の湯川秀樹がインタビューで 語った話に「間違った仮説を立てることは問題ではない。問題 は,間違っているかも知れないことに気づいた時,いかに対処 するかである」とある。世紀の大発見は無理でも,患者,家族 の満足度を高める,成果を示せるような理学療法に役立ててい ただきたい。 文 献
1) Perry J, Burnfi eld JM: GAIT ANALYSIS Normal and pathological function. second ed, SLACK, Thorofare, 2010, pp. 4‒16.
2) G tz-Neumann K:観察による歩行分析.月城慶一,他(訳),医 学書院,東京,2005,pp. 5‒80.
3) 臨床歩行分析研究会(編):臨床実習のための歩行分析トレーニン グブック.金原出版,東京,2010,pp. 1‒16.
4) Whittle MW: energy consumption. Gait Analysis an introduction. third ed, Butterworth Heinemann, Edinburgh, 2003, pp. 74‒86. 5) GOM Player [Internet]. Available from: http://www.gomplayer.jp/ 6) Image-J [Internet]. Available from: http://rsbweb.nih.gov/ij/( 日
本 語 版 イ ン ス ト ー ル 解 説 http://www.kkaneko.com/rinkou/mri/ imagejinstall.html)
7) 江 原 義 弘, 山 本 澄 子: 臨 床 歩 行 計 測 入 門. 医 歯 薬 出 版, 東 京, 2008,pp. 25‒118.
図 13 Image J による支持基底面積の計測方法