平成
29
年度
修士論文
3
次元
4
枚鏡光共振器
タ 制御
構築
広島大学
先端物質科学研究科
量子物質科学専攻
高
ー物理学研究室
M164618
宮園
大心
i
目次
1.
序論
... 1
1.1
放射光 用い 光子源
... 1
1.2
ー ー ン
ン散乱 用い 光子源
... 2
1.3
研究目的
... 5
2.
ー ー 共振器 性質
... 7
2.1
ー ー発振 原理
... 7
2.1.1
原子 光 相互作用
... 7
2.1.2
遷移確率
... 8
2.1.3
光 増幅
... 8
2.1.4
ー ー発振
... 9
2.2
ー ー光 特性
... 10
2.2.1
ガ
ン ー
... 10
ii
3.
光蓄積共振器
... 17
3.1 Fabry-Perot
共振器中
ー
伝播
... 17
3.2 Fabry-Perot
共振器 安定条件
... 22
3.3 4
枚鏡共振器
... 25
4
ー
制御
... 28
4.1
伝達関数
... 28
4-2
線図
... 29
4.3
開 ー 制御 閉 ー 制御
... 31
4.4
PI
D
制御
... 32
5. 3
次元
4
枚鏡共振器
... 38
5.1.1
共鳴観測
... 38
5.1.2
共鳴 観測
... 39
6.
共振器 制御
... 42
iii
6.2
制御
共鳴維持
... 45
6.2.1
PID
制御器 性能
... 46
6.2.2
PID
制御器
ーター最適化
... 48
6.3
タ 制御
共鳴維持
... 51
6.3.1
タ
PID
制御器 性能
... 52
6.3.2
タ
PID
制御器
ーター最適化
... 54
7.
結論 今後 展望
... 58
参考文献
... 59
謝辞
... 60
付録
A ... 61
1
1.
序論
高 ー 光子 物質科学 原子配列・構造解析 材料科学分野 材料
改質や新材料 開発 生命科学分野 画像解析 ン ン 医療診断 素粒子
実験 様々 分野 利用 現在 科学研究 い 重要 役割 担 い 次節
説明 高 ー光子 粒子加速器施設 放射光や 高 ー 電子
ー ー ー光 衝突 ー ー ン ン散乱 得 ー ー ン ン散
乱 放射光 比 同 ー 光子 得 必要 電子 ー 低い
いう利点 あ 反面 散乱断面積 − 程度 小 実用上十分 輝度 光子
え 課題 あ 入射電子 ー 又 入射 ー ー光 強度 増大 必要 あ
本研究 ー ー ー光強度 増大 光共振器 開発 行 い 光
共振器 複数 鏡 構成 閉 光路中 光 集光・蓄積 装置 あ
1.1
放射光を用いた光子源
放射光 相対論的 荷電粒子 進行方向 磁石 曲 加
速 受 際 発生 電磁波 指 放射光 代表的 円形加速器中
運動 荷電粒子 放出 ン ン放射 あ 図1-1 a ン ン放射 典
型的 ー 臨界 ー
ℎ = ℎ −
表 h ン 定数 c 光速度 粒子 運動 曲率半径 ー
ン 因子 表 ー 高い光子 得 高 ー電子 小 い曲率
曲 必要 あ 例え Sprig-8 場合 電子 ー8GeV 曲率半径 39.3m 臨界
ー28.9keV あ [12]
高輝度 放射光 得 方法 ン ュ ーター あ 図1-1 b ン ュ ータ
ー 電子 周期的 蛇行 干渉効果 高輝度 光子 得 光子
2
図1-1 a. ン ン方式 放射光生成 様子 b. ン ュ ーター方式 放射光
生成 様子
放射光 輝度 高 赤外線 X線 広い波長領域 含 上記 述
う 科学研究 役立 光子源 あ 放射光 KeV領域 光子 生
成 ーGeV領域 電子 ー 用い 大規模 電子加速器
必要 放射光 利用 光子源 規模 面 費用 面 設置 制限
いう難点 あ
1.2
ー ーコン
ン散乱を用いた光子源
X線や 線 高 ー 光子 電子 衝突 電子 ー 移
入射光子 波長 長い光子 生 現象 ン ン散乱 呼 反対
高 ー 電子 ー 低 ー 光子 衝突 光子 電子
ー 受 取 入射光子 波長 短い光子 生 逆 ン ン散乱 呼
通常実験 入射光子 ー ー光 利用 多 場合 ー ー ン
ン散乱 呼 [2]
3
図1-2 電子 ー ー ー光 衝突 高 ー 散乱光子 得
ー ー ン ン散乱 模式的 表 様子 あ 電子 ー ー ー光
散乱電子 散乱光子 4元運動量 Pe, P , ′, ′ 以下 う 表
Pe=
c
−β −
Pγ= cos �sin � −
P′= ′ cos
sin −
P′= ′ cos
sin −
E, E′ 散乱前後 光子 ー ϕ 電子 光子 衝突角
e 電子 散
乱角 m 電子 静止質量 c 真空中 光速度 β =
c, =√ − あ
電子 ー ー ー光 散乱前後 ー保存則 運動量保存則 考え 以下
成 立
m + = ′+ ′ −
m + cos � = ′ ′cos + ′cos −
sin � = ′ ′sin + ′sin −
式1-7 式1-8
m c ′β′cos = − − � + ′ −
m ′ ′ � = � � − ′ � −
両辺 和
m ′ ′ = − − � + ′ + � � − ′ � −
4
′ ′ = ′ ′ = ′
− ′ −
式1-6
′ = + − ′
− ′ = + − ′ −
− β′ =
+ − ′ −
β′ = −
+ − ′ −
あ 式1-12 以下 う
m c + E − E′ − −
式1-16 式1-11 右辺 等 い 代入 整理 散乱光子
ーE′ 以下 う 求
E′= − cos �
+ cos + [ − cos � − ] −
2012年 行わ 光子生成実験[2] 入射電子 ー ー 1.12GeV 入射 ー
ー ー 1.17eV あ 衝突角ϕ =π,�, 時 散乱角 散乱光子
ー 関係 図1-3 示 図1-3 見 衝突角ϕ = 散乱角 =
5
図1-3 ー ー ン ン散乱 衝突角ϕ 散乱角 散乱光子 ーE′ 関係
1.3
研究目的
研究 い 蓄積増大率1260倍 共振 鋭 表 指標 4040
集光径約27×12 m 3次元4枚鏡共振器 構築 ー ー ン ン散乱 . ×
8 ℎ / 線生成 実証 [3] 蓄積増大率約17000倍 約27000
高 共振器 構築 成功 [4]
光蓄積共振器内 安定 ー ー光 蓄積 共振器長 ー ー 波長 差
波長/蓄積増倍率 以下 精度 制御 必要 あ 研究 共振器
共鳴維持 制御器 用い 入射 ー ー光 発振周波数 制御 行
ー ー ン ン散乱 用い 光源 実用化 考え 長時間 わ 安定 動作
必要 ー ー光 波長 共振器長 短時間 振動 加え 周囲 温度や湿度等 多
要因 依存 光共振器 安定 動作 同時 考慮 制御
必要 あ う 多入力 制御 回路 行う 現実的 い
FAGA(Field Programmable Gate Array)素子 タ 制御 考え FPGA素子
6
可能 考え 一方 タ 制御 本研究 必要 う 高速
十分 精度 制御 可能 自明 い 本研究 ー ー ン ン散乱
タ 制御化 向 タ 制御機器 用い 光共振器 制御 行い 制御
性能 比較 行
本論 第2章 ー ー 発生原理や 性質 い 簡単 説明 第3章
光蓄積共振器 ー ー光蓄積 原理 い 説明 本研究 光蓄積共振
器 共鳴状態 タ 制御 維持 主 目的 あ 制御一般論 い
第4章 述 第5章 本研究 実際 構築 3次元4枚鏡光共振器 性能 い
記述 後第6章 制御 タ 制御 性能 比較 結果 述
7
2.
ー ーと共振器の性質
2.1
ー ー発振の原理
ー ー LASER 誘導放射 光増幅(Light Amplification by Stimulated
Emission of Radiation ) 頭文字 取 言葉 あ 原子 光 相互作用 あ 吸
収・自然放出・誘導放出 い 述 ー ー発振 原理 説明 [5]
2.1.1
原子と光の相互作用
物質中 可視光程度 光 入射 場合 物質中 原理 光 吸収・自然放出・誘導放
出 起
今 2 ー準位E0 E1 E1 > E0 原子 考え 下準位 あ 原子 周波数
= (E1 どE0)/h 光 入射 原子 光 吸収 上準位 遷移 吸収 い
う
上準位 あ 原子 適当 時間後 下準位 遷移 上下準位 ー差 相当
ー E1-E0 光子 放出 放出過程 自然放出 ぶ
上準位 あ 原子 ー E1-E0 光子 入射 ー
E1-E0 放出 下準位 遷移 放出過程 誘導放射 いう 出 光子
入射 光子 ー・位相・進行方向 等 い いう性質 あ ー ー発
振 原理 誘導放出 利用 い 誘導放出 性質 反映 ー ー光
単色・高指向性・可干渉性 いう性質 持 図2-1 原子 光 相互作用 様子 表
8
図2-1 原子 光 相互作用 様子 a. 光 吸収 上準位 ー 遷移 吸収課程 b. 光 放
出 下準位 ー 遷移 自然放射課程 c. 入射光子 誘導 光 放出 下準位
ー 遷移 誘導放出課程
2.1.2
遷移確率
1 個 原子 単位時間 自然放出 確率 A 入射光 比例 ー準位 遷移
確率 B 入射光 ー密度 W( ) あ 上 準位 原子 光
放出 確率
p → = A + � (2-1)
表 A10 及びB10 ン ュタ ン A 係数及びB 係数 いう
右辺 第2項 入射光 ー 比例 起 誘導放出 あ 下 準位 あ 原子
光 吸収 確率
p → = B � (2-2)
上下準位 1 固有状態 対応
B = (2-3)
あ
2.1.3
光の増幅
下準位E0 原子数N0 あ 媒質 考え 古典的 - ン分布
あ 温度T 熱平衡状態 あ 上準位E1 あ 原子数 以下 う
N = N e−���
(2-4)
9
N
= e− −���
(2-5)
E1>E0 下準位 あ 原子数N0 ほう 上準位 あ 原子数N1
多い いう あ 式(2-3) 示 う 吸収遷移確率 誘導放出遷移確率 等
い 上 述 う N0 > N1 分布 媒質 光 入射 場合 差 引
吸収 方 多 何 方法 N1 > N0 いう分布 媒質 入射
光 誘導放出 ほう 多 光 増幅 上 準位 原子数 下 準位 原子数
多 状態 N1 > N0 反転分布 いう N1> N0 式(2-5) 用い T 負
あ 言い表 反転分布 状態 あ 原子 っ負 温度、 あ
いう
2.1.4
ー ー発振
図2-2 ー ー 基本構成
ー ー 図2-2 う 反転分布状態 あ 媒質 二枚 鏡 う 構成 基本
あ 二枚 鏡 共振器(optical cavity) 呼ぶ 共振器内 入射 光 媒質
通過 光 増幅 ワー 増幅率 利得 P 媒質 長 L 利
得定数G 用い 以下 う [5]
= e� −
ー ー 定常発振 共振器 1往復 時 利得 損失 上回
10
共振器 1往復 際 不完全 反射や媒質内 散乱 基 損失 <
倍 あ ー ー 定常発振 条件
| � | × × � ×
| � | = −
� = − log + −
= − log 表 等価的 ワー吸収定数(loss constant) 呼
式2-8 左辺 利得 右辺 損失 表わ 係数 あ 式 利得 損失 釣 合い
意味 い
2.2
ー ー光の特性
2.2.1
ガウ
ンビー
伝播方向 対 垂直 ー 強度分布 ガ 関数(式2-7) う 形 い
ガ ン ー 呼ぶ う ー い 考え [6] A 定数 σ2 ガ
関数 分散 表
f x = Aexp − x� (2-7)
真空中 電磁波 伝播 考え 電場 波動方程式 始 c 光速度
ΔE r, t = , (2-8)
式(2-8) 解 以下 う
E r, t = r eℏ� (2-9)
方程式
11
k = (2-11)
成 立
式(2-10) 解 1
r = e−�� (2-12)
得 電磁波 z方向 伝播 強度 xy平面 一様 い
r = �� (2-13)
書 直 式(2-13) 式(2-10) 代入
∂
+ + −�� = (2-14)
以下 う 整理
ΔT + ∂ − �� ( ) =
(2-15)
ΔT= ∂ +
(2-16)
電磁波 伝播方向 対 電場 変化 電磁波 波長 比 十分小 い 仮定
以下 う
| | ≪ | |, | | ≪ | | (2-17)
式(2-15)
(ΔT− ik ) =
(2-18)
整理
12
= −� −�� + (2-19)
∂
= � [− +�{ + } ] −�� + −� (2-20)
ΔT = [− ��−� + ] −�
�( +
−� (2-21)
式(2-18) 以下 う 表
ΔT − �� = [� + ( − ) − � ( −�)] −�
�( + −�
(2-22)
全 x,y,k 式(2-22) 0
∂q
= (2-23)
∂p
= −� (2-24)
満 必要 あ
式(2-23)
q z = q +
=
(2-25)
式(2-24)
p z = −iln +
p =
(2-26)
13
I r = | r | ∝ − �+
(2-27)
期待
ω = σ (2-28)
あ ω ー ー 呼
式(2-19) 式(2-27) 満 q(z) 虚部 含 い い q0
純虚数 仮定 z=0 考え
= − �
� = −
� (2-29)
k = n, =
式(2-26) 式(2-29) 式(2-19) 代入
= exp [− ln ( + )] exp −�� ++
= Aexp [− ln − � ] exp −ik +
( � + ))
= A
√( + )
exp [� tan ]
14
ln a + ib = ln√a + b + � tan− ( )
用い
以下 う ーター 定義
ω = { + } = + (2-31)
R z = z [ + ω n ] = + (2-32)
z = tan− = tan− ( ) (2-33)
z = (2-34)
式(2-31)(2-31)(2-33) 用い 式(2-30) 整理 式(2-9) 適用
E x, y, z, t = A ℏ� exp [−�(� − − �� + ]
= A ℏ� exp [−�(� − − + ( + �� )]
(2-35)
式(2-35) 基本ガ ン ー 呼ぶ 式(2-31) 位置z ー
表 特 ω 最小 ω0 ー 呼
ぶ (2-32) 位置z ガ ン ー 等位相面 曲率半径 表 R(0)=∞
ガ ン ー z=0 平面波 あ (2-34) z0 ー長 呼
図2-3 ガ ン ー 進行方向 横軸 縦軸
様子 あ 図中 青 実線 ー ,青 点線 z>>z0 時
近似 ー あ 式(2-36)
15
赤線間 ー領域 あ ー領域 外 ,ガ ン ー (式2.36)
漸近的 近付 ,ガ ン ー 幾何学的 議論出来
図2-3 ガ ン ー ー 広 様子 |z|>z0 ガ ン ー 広 線形近
似 ー 広 一致
2.2.2
ガウ
ンビー の伝播
ガ ン ー 伝播 考え 以下 う ABCD則 いう 有用 あ
Q = ++ (2-37)
Q1,Q2 ガ ン ー 特徴 示 複素 ー ータ 呼び 以下 う
定義
= − � (2-38)
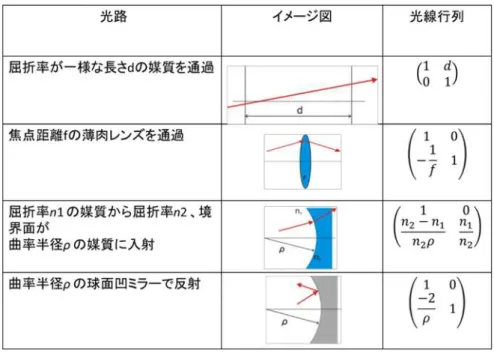
ABCD 光線行列 行列要素 A B
C D あ 主 光線行列 図2-4 示
式(2-37)(2-38) 光線行列 用い ガ ン ー 曲率半径R(z)や
16
図2-4 様々 光路 光線行列
17
3.
光蓄積共振器
本実験 ー ー光強度 増大 3次元4枚鏡共振器 用い 最
基本的 共振器 あ Fabry-Perot共振器 2枚鏡共振器 い 説明 後 3次元4枚鏡
共振器 い 説明 [2]
3.1 Fabry-Perot
共振器中のビー の伝播
Fabry-Perot共振器 い 理解 図3-1a う 2枚 鏡 平行平
板中 ー 伝播 考え
図3-1a 平行平板中 ー 伝播 ー 図 図3-2b 簡略的 表 図
図3-1a う 2枚 平行平板 ー 入射 平板 透過 反
射 繰 返 用い Fabry-Perot共振器 い 説明
2枚 平行平板 距離L 透過光E , 光路差 以下 う 書
ΔL = Lcosθ −
透過光E , 位相差
18
鏡m1 振幅反射率 r1 振幅透過率 t1 鏡m2 振幅反射率 r2 振幅透過率
t2 全反射波 複素振幅
�= ∑ = � − ( � � + � � + ⋯ = � − � ( � + � + � + ⋯ = � − � − � � −
強度反射率R = | | = | | 強度透過率T = | | = | | 式3-3
以下 う 整理
�=√ ( −
�
− � � −
同様 全透過波 複素振幅
� = − e� � −
共振器内 電磁波 図3-1b う 鏡m1 鏡m2 向 う波S12 鏡
m2 鏡m1 向 う波S21 存在 以下 う 求
= � + � � + � � + ⋯
= � ( + � + � + ⋯
= �
− �
= −√ � Ei −
同様
S = −√ √− � Ei −
共振器内 振幅
S = S + =( − √ √− � � −
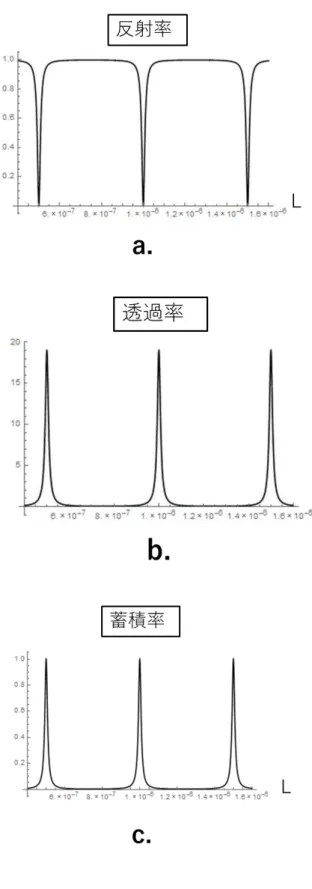
式 3-4 , 3-5 , 3-8 共振器 反射率 透過率 蓄積率 以下 う
19
Rca = | �
� | =
�
− + � −
Tca = | � � | =
−
− + � −
Sca = | � | =
+
− + � −
位相
= m m = , , , … −
→ L = cos −
満 式 3-9 , 3-10 , 3-11 以下 う
Rca = −
Tca = −
Sca = +− −
式3-15 共振器長L 式3-13 満 共振器 透過光強度波
最大 =入射強度 う 共鳴 共振 い いう 共
振器内 入射電磁波 強度 �� 倍 強度 電磁波 蓄積 い 式3-16
分 う 蓄積率Sca 鏡 反射率 高 ほ 大 わ
20
21
次 式3-10 透過率 ー ー 周波数 関数 表
�� = −
− + � � −
式3-17 横軸 ー ー 周波数 図示 図3-3 う
共鳴 起 周波数 間隔 FSR(Free Spectral Range) 呼ぶ FSR 求
式 3-2 , 3-12 ー ー 周波数 満 共鳴条件 求 以下 う
=
� =
� = −
c 光速度 表 FSR
= �� = � + − � = −
共鳴 半値幅FWHM 以下 う 書
�W�M = −
√ −
半値幅 FSR 比 式 3-19 , 3-20
= −√ −
Finesse 呼ぶ 式 3-16 , 3-21 共振器 蓄積率
以下 関係 成 立
22
図3-3 横軸 ー ー 周波数 透過率 様子 反射率R=0.99,透過率T=0.01 場
合
3.2 Fabry-Perot
共振器の安定条件
真空中 2枚 鏡 共振器 い 考え 図3-4 う 共振器 中心
ガ ン ー q(z) 2枚 ー 反射 後 再び共振器 中心 戻 q′
q z = q′ 成 立 ガ ン ー 安定 蓄積
図3-4 共振器内 ガ ン ー 一周
共振器長 L 鏡 曲率半径 , 共振器内 一周 光線行列
図2-4 参考 求
光線行列=(左 ー→中心)(左 ー反射)(右 ー→左 ー)
23
A B
C D = ( ) (− ) (− ) ( )
= ( − − + − − + − − + − − + ) −
書 = ∞ 平面 ー 場合 考え 式3-23
A B
C D = L −
光線 共振器 一往復分 距離 =2L 進 意味 ガ ン ー
発散 共振器内 安定的 蓄積 不可能 あ
次 曲率半径 , 有限 値 持 場合 考え q z = q′ z 満
式2-37 以下 成 立 必要 あ
q = ++ −
式3-25 解 公式 用い 解
= − ±√ − + −
式3-23 用い 光線行列 全 AD-BC=1 積
AD-BC=1 満 式3-26 以下 う 書
q = −
±√ + − −
式 2-38 , 3-27 比較 ガ ン ー 曲率半径R ー ω
以下 う 書
R = −B −
ω = λ | |
√ − + −
24
− D + A >
− < D + A < −
満 必要 あ 式3-40 式3-23 求 A,D 代入
< ( − ) ( − ) < −
整理 図示 図3-5 う 水色 領域 満 共振
器長L,鏡 曲率半径 , ガ ン ー 共振器内 安定的 蓄積
図3-5 水色 領域 満 共振器長L,鏡 曲率半径 , ガ ン ー 共振器内 安定
的 蓄積
本実験 電子 ー ー ー光 ー ー ン ン散乱 想定 共振器 設計
い 電子 ー ー ー光 衝突点 ー ー光
ー ー ン ン 反応確率 上 重要 要因 あ 式3-29 い
= =
ω =λ √ ( − ) −
共振器長L=0.42m ー 鏡 曲率半径 関係 図示 図3-6
25
図3-6 鏡 曲率半径 ー 関係
図3-6 分 う →L= . m ー 最小
図3-5 ×印 位置 あ ガ ン ー 共振器内 安定 蓄積
条件 境界線 位置 共振器 鏡 設置誤差 対 不安定 あ =L 設
計 共振器 共振型共振器 呼 共振器内 伝播 光 焦点 共振器 中心 一
点 交わ 設計 い あ 図3-7
図3-7 共振型共振器 様子 共振器内 伝播 光 焦点 一点 交わ 鏡 設置誤差 対 不
安定
3.3 4
枚鏡共振器
4枚鏡共振器 (図3-8) う 2枚 平面鏡 2枚 凹面鏡 構成 共振器 あ
凹面鏡間 ー 絞 ー ー ン ン 衝突点 い [3]
0.2 0.4 0.6 0.8 m
26
図3-8 4枚鏡共振器 ー 図
2枚 凹面鏡 曲率半径 各鏡間 距離 L 凹面鏡 中心 共振器 一
周 時 ー 伝播 図3-9 う 式3-25,29 用い ー
曲率半径 関係 表 図3-10 う 各鏡間 距離
L=0.42m 図3-10 凹面鏡 曲率半径 =L=0.42m ー
最小 分 =L う 設計 共振器 共焦点型共振器 呼
共焦点型共振器 図3-11 う 凹面鏡 焦点 う片方 鏡面上
あ 共振型共振器 図3-7 比 鏡 設置精度 対 許容 大 安定 動作
期待
図3-9 4枚鏡共振器 ー 一周伝播 時 模式図
図3-10 凹面鏡 曲率半径 ー 関係
0.405 0.410 0.415 0.420 0.425 0.430 m 0.00002
0.00004 0.00006 0.00008 0.0001
27
図3-11 4枚鏡共振器 共焦点型 凹面鏡 焦点 う片方 鏡面上 あ 共振型
共振器 比 鏡 設置精度 許容 大 安定 動作 期待
一般 鏡 対 ー ー光 垂直入射 い場合 入射光 対 水平 面 垂直 面
焦点距離 う 非点収差 呼ぶ 非点収差 2次元 枚鏡光共振器
内 ー 楕円系 う ー ー ン ン散乱 衝突点
ー 径 絞 い 楕円形 ー 好 い
共振器内部 伝播 光 光路 3次元的 非点収差 打 消 効果 持
28
4
ー
ッ 制御
光蓄積共振器 安定 ー ー光 蓄積 様々 振動や 影響
刻々 変化 い 共振器長 ー ー 波長 差 波長/蓄積増大率 以下 制御
必要 あ 本研究 共振器長 変化 合わ 入射 ー ー 光周波数 変調
共鳴 維持 実現 い 入射 ー ー 光周波数 PID制御 用い 制
御 い 章 光蓄積共振器 制御 考え 材料 自動制御 基本的
内容 PID制御 ー 制御 有用性 い 述
4.1
伝達関数
伝達関数 い 考え RC回路 図4-1参照 例 考え
図4-1 RC回路 様子
入力電圧 抵抗器 ン ン ー 電圧 vin(t),vR(t),vC(t)
電圧 以下 う 関係 成 立
vi t = vR + � −
回路 流 電流 i(t)
vR t = Ri t −
v t = ∫ � −
29
v = � + ∫ � −
両辺 変換[付録A]
Vi s = (R + ) I s −
両辺 V s = 割 整理
V s = + � −
う 書 上記 式(4-6) 見
OUT s = � s IN s −
い 分 G(s) 制御系や制御対象 表 伝達
関数 呼ぶ 後 詳 説明 伝達関数 電気回路 視覚的 簡略化 表
線図や 周波数特性 考え 際 非常 重要 あ
4-2
ッ 線図
実際 制御 行う場合 多 要素 組 合わ 制御系 構築 入出力信号や制
御系 制御対象 伝達関数 視覚的 図 示 物 線図 言う
伝達関数 G(s) 表 線図 図4-2 う [7]
図4-2 伝達関数G(s) 線図
30
図4-3 線図 等価交換図
図4-3 ー 結合 少 説明 全体 入力及び 出力
IN(s),OUT(s) G(s) 入力 ING(s)
ING = ∓ � −
OUT s = � s ING −
式(4-8),(4-9) ING(s) 消去
OUT s = ± � s −
ー 結合 う 出力信号 利用 再び出力演算 う 制御
一般的 ー 制御 呼ぶ 式(4-8) ∓ -担 い う ー
31
4.3
開 ー 制御と閉 ー 制御
制御 目的 与え 希望通 動作 あ 制御器
呼 動的 追加 構成法 図(4-4) 示 う 開
ー 制御系 閉 ー 制御系 あ 2 制御系 違い い 簡単 述
図4-4) い G(s) 制御 伝達関数 表 い 制御対象
いう K(s) 制御器 補償器 いう 制御対象 出力信号y(t) 観測量 い
い 制御器 出力信号u(t) 操作量 制御入力 いう 入力信号r(t) 目
標信号 いう 目標信号 対 応答
Y e = −
Ycl e s = +K s −
希望通 動 いう 制御対象 出力信号
y(t) 入力信号r(t) 等 い いう あ 言い換え 変換 得
式 Y(s),R(s) 等 いい あ 式(4-11),(4-12) 満 う 制御器
K(s) 設定 制御系 制御 行う
図4-4 a.開 ー 制御 b.閉 ー 制御
次 開 ー 制御 閉 ー 制御 比較 図4-5 う 外乱
32
図4-5 外乱 加わ 線図
開 ー 制御系 い 考え 図4-5 a 出力信号
Y e s = � s K s R s + � s W s −
式4-23 外乱W(s) 対 制御器K(s) 全 寄与 い い わ
開 ー 系 外乱 あ 場合制御 い いう 示 い
次 閉 ー 制御系 い 考え 図4-5 b 出力信号
Ycl e s = +� s K s + + −
式 4-14 閉 ー 制御系 外乱W(s) 対 制御器K(s) 寄与
制御器K(s) 適当 設定 や 外乱 抑制
4.4
PI
D
制御
次 本実験 ー ー光 発振周波数 制御 い PID制御 い 説明
目標値 制御量 差 偏差 PID制御 偏差 比例 出力 出 動作(P動
作:Proportional) 偏差 時間積分 比例 出力 出 動作(I動作:Integral) 偏差 時間変化
率 比例 出力 出 動作(D動作:Derivative) 組 合わ 以下 う
[8][9]
33
u t , e t 制御出力 偏差 あ KP, �, 3 ーター
比例 ン 積分 ン 微分 ン 呼 PID制御 3 ータ
ー 決 方 重要 次 (式4-15) 変換 行い整理
U s = (KP+KI+ sK ) −
線図 書 図4-6 う PID制御 現在 偏差 比例
動作 P動作 過去 偏差 積算 動作 I動作 将来 動 予測 動作 D動
作 含 過去 現在 未来 関 情報 有 い PID制御 構
造 わ や ーター 調整 容易 あ 優 制御 あ 現在 多
場面 使用 い
図 4-6 PID制御 線図
次 動作 偏差 対 う 動 実際 考え 伝達
関数� = + 表 PID制御 場合 考え
P制御
P制御 行う 線図 図4-7 a 図4-3 用い 等価交換
図4-7 b う
図4-7 P制御 線図
34
Y s = +KP
�+ −
書 目標信号 単位 信号 R s = あ 式4-27
Y s = +KP
�+
= �
�+ ( − + �+ ) −
式4-28 表A-1 参考 逆 変化
y t = KP
�+ ( −
− �+ −
式4-29 極限
lim→∞ = �
�+ −
目標値r t = 収束 い わ (図4-8参照) 目標値 差
残留偏差 呼ぶ
図4-8 KP=10 時 P制御 様子
P制御 場合 目標値 近 必 残留偏差 残
う
PI制御
0 2 4 6 8 10
時間t 0.5
1.0 1.5 2.0
出力y t
Kp 10
35
次 PI制御 い 同様 考え 線図 書 等価交換 図4-9 う
図4-9 PI制御 線図
先ほ 同様 目標信号 単位 信号 用い 出力Y(s)
Y s = �+
�
�+ �+ +
−
= � + �
�+ + + � −
式4-32 式A-11 用い 極限
lim→∞ = lim→ � = −
求 出力 目標値 収束 図4-10
図4-10 P制御 PI制御 比較
0 2 4 6 8 10 時間t 0.5
1.0 1.5 2.0
出力y t
Kp 10
Kp 1,Ki 10
Kp 10,Ki 30
36
図4-10 見 P制御 残留偏差 残 い PI制御 目標値 収束 い
目標値 通 過 う ー ー ュー 図4-10灰色線 や目標値周辺 振
動 う ンチン 図4-10緑線 起
PID制御
次 D制御 付 加え PID制御 い 考え 線図 書 図4-11
う 単位 信号 入力 出力信号
Y s = �+
�+
�+ �+ + +
−
出力信号 図4-12 う
図4-11 PID制御 線図
図4-12 P制御 PI制御,PID制御 比較
図 4-12 見 PID制御 ー ー ュー や ンチン 等 起 目標
値 収束 い
結果 わ う PID制御 必 3 要素全 使う必要 PI
0 2 4 6 8 10 時間t 0.5
1.0 1.5 2.0
出力y t
Kp 10
Kp 5,Ki 10
Kp 10,Ki 10,Kd 5
37
制御 制御 PID制御 ー ー ュー や ンチン 等 起
制御 最 優 制御系 う 思わ D動作 微分要素 伝
達関数 用い い 図B-1 分 う 微分要素 高周波 ン 増加
特性 あ 高周波 あ 多い 影響 大 う恐 あ
扱う 合わ 制御系 考え い 本実験 ー ー波
長 共振器長 差 波長/蓄積増大率 以下 数pm~数nm 制御 必要 あ 外乱 影
38
5. 3
次元
4
枚鏡共振器
制御 タ 制御 性能 比較 次元 枚鏡共振器 用い 光蓄積
共振器 構築 章 構築 光共振器 性能 い 述
5.1.1
共鳴観測のためのセッ
ッ
図5-1 上図 3次元4枚鏡光共振器 下図 共鳴観測
図5-1 上図 本研究 用い 3次元4枚鏡光共振器 様子 あ 図中 平面鏡M1
39
繰 返 平面鏡M1 戻 ン 型共振器 い 対向 M1,M3
M2,M4 90°傾い 3次元構造 各鏡 距離 420mm あ 各鏡
反射率 90°入射 99.1% 45°入射 99.5% 使用 凹面鏡M3,M4
曲率半径 420mm あ
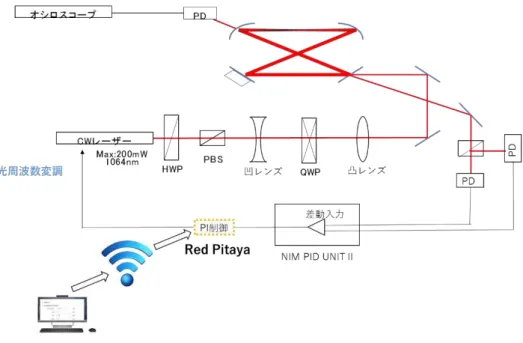
図5-1 下図 共鳴観測 あ ー ー 波長1064nm 最大
強度200mW CW ー ー 使用 COHERENT社:Mephisto S 出力 ー
ー 1/2波長板 HWP 通過 後偏光 ー ター PBS 通過
HWP 直線偏光 成分 操作 PBS 透過 ー ー光 強度 調節
PBS通過後 凹 ン 凸 ン ー 集光 用い 凸 ン 通過後
ー ー光 共振器 入射 共振器 取 付 圧電素子 電圧 印加
共振器長 変化 共鳴 起 共振器 透過光
ター 検出 共鳴 観測 いう あ
5.1.2
共鳴の観測
図5-1下図 共鳴観測 用い 共鳴 観測 様子 (図5-2a)
あ 図 見 図3-2b う 共振器長 共鳴条件満 透過光
現 い わ
図5-2 共振器長 変化 透過光 様子 図中 黄色い線 透過光 表 緑 線 圧電素子
40
図5-3 図5-2 1 ー 拡大 様子
最 高い ー 現 間隔 FSR 図5-2 ー FWHM(半値全幅) 図5-3
以下 う 結果
�SR = ± ms
�W�M = . ± . ms
式3-21 用い 求
�iness = �SR = ±
光共振器 使用 各鏡 反射率 . % ≤ ≤ . % あ 共振器 有
効反射率 以下 範囲 あ 考え
. % ≤ ≤ . %
共振器 有効反射率 予想 式3-21 用い
≤ �iness ≤
求 実測 予想値 範囲内 あ 実測
光共振器 有効反射率 求
= . %
あ 構築 光共振器 蓄積増大率 式3-16
41
42
6.
共振器の制御
6.1
偏光特性を用いた誤差信号の取得
本実験 PI制御 ー ー 発振周波数 制御 光共振器 共鳴維持 行
3次元4枚鏡共振器 偏光特性 利用 誤差信号 取得 PI制御 用い 以
下 概要 示 [10]
図6-1 誤差信号取得 図
共振器 x方向 直線偏光 入射 場合 考え 電場振幅
� = −
あ 右回 円偏光 共鳴 い 共振器 入射 入射波 う 入
射 ー 反射 左回 円偏光 電場
= � −
あ r1 入射 ー 振幅反射率 表 次 右回 円偏光 反射光 い
考え 右回 円偏光 反射光 入射 ー 直接反射 成分 共振器内部 透過
43
ER= ( − −� −
以下 う 表 共振器内 周回 電場 強度 表 本質的
共振器内 電場振幅 あ = 時 共鳴状態 あ
= − ���� −
r 有効振幅反射率 表
= √ −
入射 ー 反射波 振幅E 右回 円偏光成分 左回 円偏光成分 重 合わ
表 式5-2,5-3
= + �= ( −−� ) −
= ( ) −
反射 x-y平面 45°回転 操作 加え , 以下 う 定義
( ) =
√ − ( )
=
√ ( −
+ �
− − � ) −
| | − | | 表 様子 図6-2 あ = | | = . , | | =
. 図6-3 透過光 様子 表 い 図6-2,6-3
比較 図6-2 共鳴点 前後 符合 変わ 信号 誤差信号
44
図6-2 偏光特性 用い 誤差信号
図6-3 共鳴時 透過光 様子
図6-1 い 1/2波長板 HWP 入射 ー 反射
x-y平面 45°回転 操作 行い 2 ター PD ,
強度| | , | | 検出 用い 後 検出 | | , | | 差動入力
目的 誤差信号 取得
図6-4 実際 得 誤差信号 様子 あ 図中 黄色線 透過光 表 紫
誤差信号 表 図 見 共鳴点 前後 符号 変化 い わ
直線偏光 入射 い 右回 円偏光 左回 円偏光 異 タ ン 共
鳴 い わ
0.15 0.10 0.05 0.05 0.10 0.15 0.2
0.4 0.6 0.8 1.0
45
図6-4 実際 得 透過光 誤差信号 比較 様子
6.2
制御による共鳴維持
図6-5 制御 共鳴維持 行 実験 示 ー ー光
共振器 入射 共鳴観測 図5-1 同 あ 後 共振
器 戻 光 用い 得 誤差信号 PID制御器 入力 共鳴条件 満
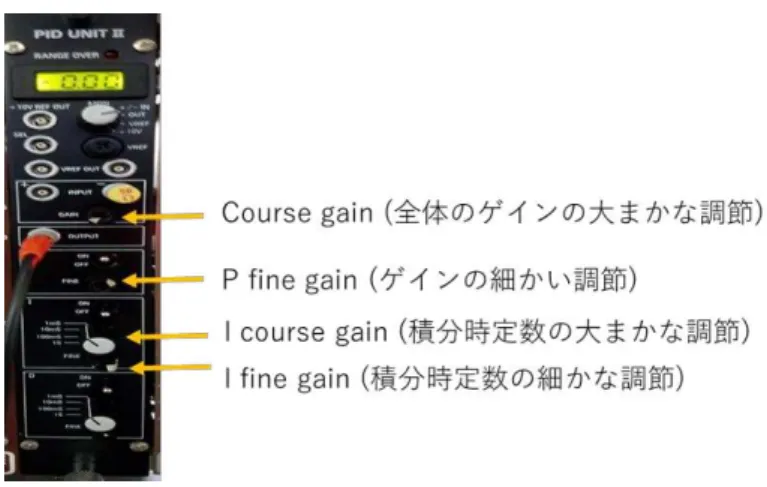
う ー ー光 発振周波数 制御 い 今回 PID制御器 NIM PID
UNITⅡ 図6-6 使用 図6-6 中 Course gain, P fine gain 回
P動作 ン 細 調整 Course gain, I course gain, I fine gain
46
図6-5 共鳴維持 制御
図6-6 PID制御器 NIM PID UNITⅡ 様子
本実験 NIM PID UNITⅡ ン 積分時定数 性能 測定 共鳴 維
持 い 時 透過光 強度 標準偏差
平均値
×
%
測定 強度ゆ強度ゆ 最小 う ン・積分時定数 最適化 行
6.2.1
PID
制御器の性能
ン
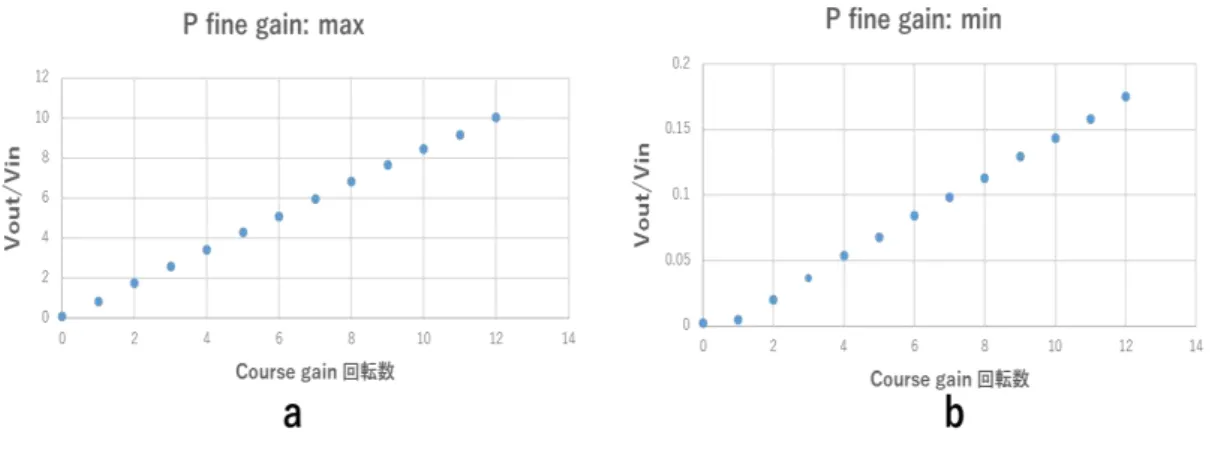
図6-7 う NIM PID UNITⅡ ン 性能 測定
図6-8 う 図6-8a P fine gain 最大 大 時
Course gain 回転数 ン 変化 表 い 図6-8b P fine gain
最小 時 Course gain 回転数 ン 変化 表 い 図
6-8 見 Course gain P fine gain 組 合わ ン 0.002倍~10.1倍
47
図6-7 NIM PID UNITⅡ ン測定 ン ョン ター 作 出
信号 ー 直接測定 時 振幅 � NIM PID UNITⅡ 経由 測定 振幅 比 �
�� ン
図6-8 NIM PID UNITⅡ ン 性能 a P fine gain 最大 時 Course gain 回転数
ン 変化 b P fine gain 最小 時 Course gain 回転数 ン 変化
積分時定数
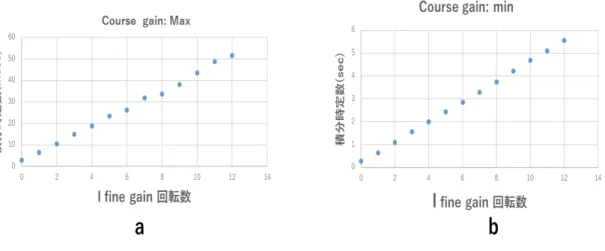
図6-9a NIM PID UNITⅡ 積分時定数 測定 あ 積分時定数
十分長い周期 方形波 PID制御器 入力 回路 飽和 時
間T1 積分時定数 (図6-9b) Course gain I course gain I fine gain 変え 積分
時定数 測定 図6-10a Course gain 最大 時 I fine gain 回
転数 積分時定数 変化 表 い 図6-10b Course gain 最小 時
I fine gain 回転数 積分時定数 変化 表 い I course
gain 最小 回 積分時定数 10倍 100倍 1000倍 変
え Course gain I course gain I fine gain 組 合わ
48
図6-9 a積分時定数測定 b積分時定数測定 様子
図6-10 NIM PID UNITⅡ 積分時定数 性能
6.2.2
PID
制御器の ラ ーター最適化
図6-5 い NIM PID UNITⅡ ン・積分時定数 変化
共鳴維持 行 際 共振器 透過光 10秒間 ータ 取得 透過光
強度ゆ 測定 図6-11 a 積分時定数7.73ms 青 又 4.67ms 赤 固定
ン 変化 時 強度ゆ 様子 あ 図6-11 a 見 ン
増加 強度ゆ 大 わ 図6-11 b ン 0.068倍
固定 積分時定数 変化 時 強度ゆ 様子 あ 図6-11 b 見
積分時定数 大 強度ゆ 大 い 変化 小 い
49
ン0.068倍 積分時定数7.7ms 透過光 強度ゆ 0.61% 最 小
a
50
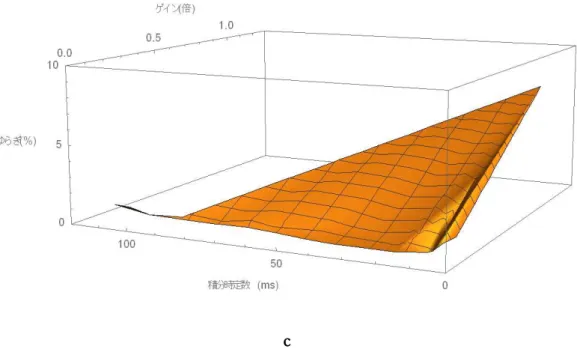
c
図6-11 a ン 変化 時 強度ゆ 様子 b 積分時定数 変化 時 強度ゆ
様子 c ン・積分時定数 強度ゆ 関係 3次元
NIM PID UNITⅡ PI ーター 最適化 透過光 様子・
強度ゆ 0.61% 最適化 前 透過光 様子・ 強度ゆ
4.0% 図6-12 示 図6-12a.b 図6-12c.d 比較 わ う
51
図6-12 PI ーター 最適化 時 ゆ 0.61% 最適化 い い時 ゆ 4.0%
共鳴維持 い 際 透過光 様子 比較 a,b 最適化 い 時
透過光 様子 あ c,d 最適化 い い時 透過光 様子 あ
6.3
タ 制御による共鳴維持
図6-13 タ PID制御器 共鳴維持 示
概要 制御 場合 ほ 同 PI制御 タ 化
NIM PID UNITⅡ ン1倍 差動入力 行う タ PID制御器 FAGA ー
Red Pitaya 図6-14a い PID ン ー ソ 用い Red
Pitaya 通 PC 繋 PC上 操作 行う 図
6-14b PID ン ー ソ 入力画面 図中 Kp Ki PI制御
ーター 対応 い ーター 0~8000 間 指定
52
図6-13 共鳴維持 図 タ 制御
図14 a. FPGA ー Red Pitaya 様子 b. Red Pitaya ン ー い PIDソ
ン ー 画面 様子 図中 Kp Ki PI制御 ーター 対応
ーター 変更 ン・積分時定数 調節 行う
6.3.1
タ
PID
制御器の性能
NIM PID UNITⅡ 場合 同 う Red Pitaya ン・積分時定数 性能 測定
図6-13 見 NIM PID UNITⅡ ン1倍 差動入力器 使用 い
53
Pitaya単体 性能 Red Pitaya NIM PID UNITⅡ 直列 繋い 時 性能 比較
図6-15
図6-15 a. Red Pitaya単体 ン・積分時定数測定 図 b. Red Pitaya ン 1倍
調節 NIM PID UNITⅡ 直列 繋い 時 ン・積分時定数 図
ン
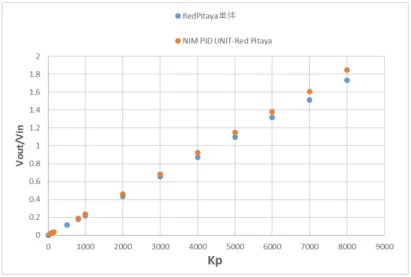
図6-15 い ン ョン ーター 1kHz sin波 作
回路 入力 Red Pitaya PID ン ー ソ Kp
ーター 変化 時 ン 変化 図6-16 う (図6-16) 青
Red Pitaya単体 ン 表 赤 Red Pitaya ン1倍 NIM
PID UNITⅡ 直列 繋い 時 ン 表 い 2 結果 比較 ほ 同
結果 得 NIM PID UNITⅡ ン1倍 差動入力器 動作 い
分 Kp ーター ン 線形性 あ 0~1.8倍程度 ン 調節
わ
54
積分時定数
Red Pitaya 積分時定数 性能 Ki ーター 変化 NIM PID UNITⅡ
時 同様 測定 行 得 結果 図6-16 あ 図6-16 青
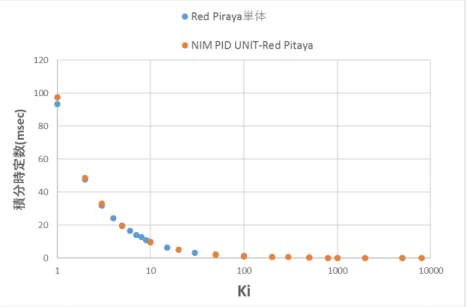
Red Pitaya単体 積分時定数 表 赤 ン1倍 差動入力器 NIM PID
UNITⅡ Red Pitaya 直列 繋い 時 積分時定数 表 い 2 結果 比較
両者 ほ 同 値 あ NIM PID UNITⅡ ン1倍 差動入力
働い い わ Ki ーター 積分時定数 0.024~97.6ms 範
囲 調節可能 分
図6-16 Red Pitaya Ki ーター 積分時定数 関係 青 Red Pitaya単体 積分時定
数 表 赤 ン1倍 NIM PID UNITⅡ Red Pitaya 直列 繋い 時 積分時定数
表 い
6.3.2
タ
PID
制御器の ラ ーター最適化
制御 場合 同 う Red Pitaya PID ン ー ソ ン・
積分時定数 変化 共鳴維持 い 透過光 強度ゆ 測定 図
6-17 図6-17 a 積分時定数 0.48ms 青 又 2.05ms 赤 固定 ン
変化 時 透過光強度 ゆ 表 い 図6-17 a 見 制御
55
6-17 b ン 0.003倍 青 又 0.03倍 赤 固定 積分時定数 変化
時 強度ゆ 左図 拡大 様子 右図 表 い 図6-17 b 見
制御 場合 積分時定数 変化 対 強度ゆ 変化 小
対 タ 制御 場合 変化 大 い タ 制御 強度ゆ 最 小
積分時定数 範囲 . ~ . ms 存在 制御 う 範囲 見
制御 積分時定数 性能 限界( . 以下 あ 考え
図6-17 c ン・積分時定数 強度ゆ 関係 3次元 あ
Red Pitaya ン 0.043倍 積分時定数 2.1ms 時 強度ゆ 0.54%
最小
56
b
c
図6-17 a ン 変化 時 強度ゆ 様子 b 積分時定数 変化 時 強度ゆ
様子 c ン・積分時定数 強度ゆ 関係 3次元
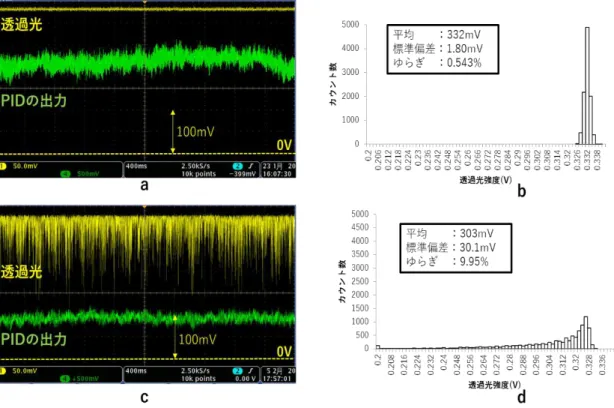
Red Pitaya PI ーター 最適化 時 強度ゆ 0.54% 透過光 様
子 最適化 前 強度ゆ 10% 透過光 様子
図6-18 示 図6-18a.b 図6-18c.d 比較 PI
57
図6-18 a. PI ーター 最適化 時 透過光 様子 b. PI ーター 最適化 透
過光 c. PI ーター 最適化 前 透過光 様子 d. PI ーター 最適化
58
7.
結論と今後の展望
ー ー ン ン散乱 長時間 わ 安定的 制御 考え 光共振器 温度 湿度等
複数 要素 対 同時制御 可能 タ 制御 導入 不可欠
光共振器 制御 制御 タ 制御 性能 比較 行
± 蓄積増大率140倍 3次元4枚鏡光共振器 構築 共振器 制御
制御 NIN PID UNITⅡ タ 制御 FPGA ー Red Pitaya 用い
共鳴維持中 透過光 強度ゆ 最小 う NIM PID UNITⅡ/Red Pitaya PI
ーター 最適化 NIM PID UNITⅡ ン0.068倍 積分時定数
7.7ms 強度ゆ 0.61% 最小 Red Pitaya ン0.043倍 積分時
定数2.1ms 強度ゆ 0.54% 最小 NIM PID UNITⅡ Red Pitaya 最
適化 時 ン・積分時定数 強度ゆ 比 近い値 タ
制御 Red Pitaya 制御性能 制御 NIM PID UNITⅡ 同等以上 あ いう
結果 得 ー ー ン ン散乱 タ 制御化 可能性 示唆
あ
NIM PID UNITⅡ 積分時定数 変化 強度ゆ 変化 小
対 Red Pitaya 積分時定数 変化 強度ゆ 変化 大 PI制御
ーター ン 積分時定数 決 い う 差異
本来 い あ 点 NIM PID UNITⅡ Red Pitaya 間 未知 違い あ 今
後 原因 調 必要 あ 今回使用 光共振器 約 あ
ー ー ン ン散乱 要求 光共振器 数万程度 あ 高い精
度 制御 必要 2016年度 研究 NIM PID UNITⅡ 用い 約
光共振器 制御 成功 い [3] 本研究 低 い 高 達成
PID回路 Red Pitaya タ 制御 同程度 性能 示 今後
59
参考文献
[1]J3D3Jackかonγ っ電磁気学 下 原書第2版、, 吉岡書店 1994
[2]S3Miけoかhiγ eが al3γ っDeぎelopmenが of a Polaおiげed Poかiがおon Soきおce bけ laかeお Compがon Scaががeおing
きかing an Opがical Reかonanが Caぎiがけ、γ 広島大学先端物質科学研究科博士論文(2011)
[3]T.Akagi, et al., っDeぎelopmenが of a 3D 4-mirror optical cavity for the ILC polarized positron
source、, 広島大学先端物質科学研究科博士論文 2013
[4]川居亮太, っ小型高輝度光子源 為 高 光共振器 開発、, 広島大学先端物質科学研
究科修士論文 2017
[5]霜田光一, っ ー ー物理入門、, 岩波書店 1983
[6]A3Yaおiぎγ っ光 基礎編 原書5版、γ 丸善株式会社 2000
[7]木田隆, っ ー 制御 基礎、γ 培風館 2003
[8]山本重彦,加藤尚武, っPID制御 基礎 応用 第2版、γ 朝倉書店 2005
[9]江口弘文, っ初 学ぶPID制御 基礎、γ 東京電機大学出版局(2006)
[10]Y3Hondaγ eが alγ っSがabiliげaがion of a non-planaお opがical polaおiげaがion pおopeおがけ3、Opがicか
Communications (2009)
[11]宮園大心, っ ー ー光共振器 開発、, 広島大学理学部物理科学科卒業論文(2016)
60
謝辞
今回修士論文 執筆 あ 多 方 世話 心 感謝 意
表
広島大学 高 ー物理学研究室 高橋徹准教授 自分 見落 い 視点 適
切 頂 何度 研究 手助 い 心 感謝い
同研究室 飯沼昌隆助教 研究や日常生活 気 使 い 安心 研究 打
込 心 感謝い 以前当研究室 在籍 現在東北
大学 助教授 上杉祐貴様 頻繁 連絡 研究 関 数多 疑問
答え 心 感謝い
当研究室 石川君 渡壁君 野口君 荒本君 本田君 松山君 研究 関 議論
将棋や卓球 通 研究 息抜 楽 研究室 過
あ う い
最後 大学 6年間通わ 両親 心 感謝 同時 今後恩返
61
付録
A
変換
変換
性質
自動制御
い 考え
非常 重要
変換
性質
い 説明
t
≧
0
定義
時間 関数
f(t)
考え
あ 自然数 以上 全
a
対
|
| ≤ �
�−
成 立
� s = ∫
∞ −−
いう変換
実数部
大
全
複素数
s
い
F(s)
収束
f(t)
F(s)
変換
変換 いう
c>
f t =
� ∫
�+�∞�−�∞
−
t
≧
0
f(t)
求
逆変換 いう
式
(A-1),(A-2)
以下
う 省略
書
62
f t = ℒ
−[� s ]
A −
次
変換 性質
い
い
紹介
変換及び
逆変換
線形性 あ
以下 成 立
ℒ[
+
] =
+
−
ℒ
−[
+
] =
+
−
f(t)
微分・積分
変換
ℒ [
] =
−
−
ℒ [∫
] =
+
A −
微分
s
掛 算 積分
s
割 算 簡単 表
時
間変化 関連
f(t)
t
→
0
や
t
→∞ 極限
f(t)
変換
F(s)
用い
以下
う
lim
→= lim
→∞−
lim
→∞= lim
→−
今後自動制御
い 考え 場合
変換 頻出
以下
(
表
A-1)
用い
変換
時間関数 変換
ン (t) 1
単位 1
63
ン t
s
指数関数 e-at
+
正弦関数 sinωt ω
+
余弦関数 cosωt s
+
64
付録
B
制御系 周波数特性
制御対象 周期的 変化 信号 加え 出力 周期的 変化 入力信
号 出力信号 比較 信号 振幅 位相 変化 変化 仕方
入力信号 周波数 異 特性 周波数特性 周波数応答 呼び 知
制御系 特性 解析 上 わ 重要 あ 周波数特性 図 表
線図や ー 線図 あ い 代表的 ー 線図 書
周波数特性 い 説明 [8]
ー 線図 書 方 い 説明 今 伝達関数G(s) 表
以下 入力 あ
Vi′ = � � + �� −
出力信号
V′ = sin + � −
あ 入出力 比Vo
�� ン 呼び 位相 変化ϕ − ϕ 位相差
呼ぶ 伝達関数G(s) い s = iω
� s = � iω = ℛ[� iω ] + iℐ[� iω ] B −
� iω 周波数伝達関数 呼ぶ ℛ[� iω ], ℐ[� iω ] � iω
実部 虚部 表 � iω 絶対値 偏角 以下 う
| � | = √{ℛ[� iω ]} + {ℐ[� iω ]} −
arg[� iω ] = arctan ℐ[� iω ]
ℛ[� iω ] B −
絶対値(式B-4) � iω ン 等 偏角 式B-5 � iω 位相差 等
い 横軸 周波数 縦軸 ン ン曲線 横軸 周波数 縦軸 位
65
横軸 対数 ン曲線 縦軸 |� iω | 代わ
log � 用い 一般的 あ
次 用い ー 線図 実際 書 周波数特性 い
説明
微分要素
微分要素 周波数伝達関数 式A-8
� iω = iω B −
表 ン 位相差
| � | = −
arg[� iω ] = −
(式B-7),(式B-8) ン曲線 位相曲線 描 (図4-6) う 書 ン
曲線 見 低周波 ン 小 高周波数 ン 大 い
分 う 要素 タ 呼ぶ 位相曲線 い 周波
66
図B-1微分要素 ー 線図 上図 ン曲線 下図 位相曲線
積分要素
積分要素 周波数伝達関数 (式A-9)
� iω = � −
表 ン 位相差 以下 う
| � | = −
arg[ � ] = − B −
式B-10 式B-11 ン曲線 位相曲線 書 図B-2 う
ン曲線 低周波 ン 大 高周波 ン 小 い 分
う 要素 ー タ 呼ぶ 位相曲線 見 周波数 関係
位相 - /2遅 い わ
1 1000 106
w 50
100 20log10 G iw
1 1000 106
67
図B-2 積分要素 ー 線図 上図 ン曲線 下図 位相曲線
無駄時間要素
図B-3 a う t=0 Vin(t) 入力 場合 (図B-3 b) う あ 時間L
遅 V = � − 出力 時間L 無駄時間 呼び 実際 制御系
組 場合 避 い あ 無駄時間要素 周波数伝達関数 無駄時間
L 用い 以下 う
� iω = e−� � B −
ン 位相差
| � | = −
arg[� iω ] = −Lω B −
式B-13 式B-14 明 う 無駄時間要素 ン 対 全
作用 い 位相 関 高周波 ほ 位相 遅 働 あ 無駄
時間L 大 いほ 位相 遅 大 わ 図B-4
1 1000 106
w
100 50 20 log10 G iw
1 1000 106
68
図B-3 無駄時間 出力応答 遅 様子
{
図B-4 無駄時間要素 位相曲線 無駄時間 大 ほ 位相 遅 大
わ
0.1 10 1000 105
w
1.0 0.8 0.6 0.4 0.2 arg G iw
L 1 s