温度制御可能な自励振動 ート イプの研究
Studies on Temperature (ontrollable
Oscillating Heat Pipe
岩田 直子
博士 工学
総合研究大学院大学
物理科学研究科
宇宙科学専攻
成 7 度
5
成 27 度 博士論文
温度制御可能な自励振動 ート イプの研究
Studies on Temperature Controllable Oscillating Heat Pipe
岩田 直子
総合研究大学院大学
物理科学研究科
宇宙科学専攻
指 教員 高木 亮治 准教授
川 博之 准教授
i
目次
第1章 序論
1.1 研究の背景 1
1.1.1 宇宙機の熱制御技術の課題 1
1.1.2 ヒー イプとその発展 1
1.1.3 OHPの動作原理と特性 3
1.1.4 OHP先行研究 4
1.2 研究の目的 7
1.3 本論文の構成 7
第2章 FC-OHPの動作限界
2.1 序論 16
2.2 作動限界時の動作温度 16
2.2.1 実験概要 16
2.2.2 実験装置 16
2.2.3 実験条件 17
2.2.4 実験手順 18
2.2.5 実験結果 19
2.2.6 OHP内液体積と動作限界時の温度についての考察 20
2.2.7 P-V線図による解釈 22
2.3 可視化実験 23
2.3.1 実験概要 23
2.3.2 実験装置 23
2.3.3 実験条件と実験手法 23
2.3.4 実験結果 24
2.3.5 低封入率時の動作限界 24
2.4 結論 25
第3章 ザーバによる温度制御機能
3.1 序論 61
ii
3.2 ザーバ付 OHPの動作と ザーバ内液分布の影響 61
3.2.1 実験概要 61
3.2.2 実験装置 62
3.2.3 実験条件 63
3.2.4 実験手順 63
3.2.5 ザーバ無しのOHPの実験結果 64
3.2.6 ザーバ有 のOHPの実験結果 65
3.2.7 熱コン クタンスの比較 66
3.2.8 ザーバの設置方向の影響 67
3.2.9 ザーバに接続さ る継手類 OHP加熱部温度に及ぼす影響 69
3.2.9.1 実験装置 69
3.2.9.2 実験条件と実験手順 70
3.2.9.3 Test-F1の実験結果 71 3.2.9.4 Test-F2の実験結果 71 3.2.9.5 ザーバ内気液分布とOHP加熱部温度 72 3.3 VC-OHPの熱真空環境下 の実証と ザーバによるOHP動作温度制御 73
3.3.1 実験概要 73
3.3.2 実験装置 73
3.3.3 実験条件 74
3.3.4 実験手順 74
3.3.5 実験結果と考察 75
3.4 可視化実験による ザーバの液量調整機能の調査 76
3.4.1 実験概要 76
3.4.2 実験装置 76
3.4.3 実験条件 77
3.4.4 実験手順 77
3.4.5 実験結果と考察 78
3.5 ザーバ付 OHP内の液量と熱輸送量の相関 79
3.5.1 熱平衡状態の熱輸送モ ル 79
3.5.2 実験か 得 た液量を元にした熱輸送量の計算 82
3.5.3 熱輸送量計算のまとめ 85
3.6 ザーバ付 OHPの起動と輸送限界 85
3.6.1 可視化実験 86
3.6.1.1 実験装置 86
3.6.1.2 実験条件と実験手順 87
3.6.1.3 実験結果 87
iii
3.6.2 ザーバ付 OHPの起動 87
3.6.3 ザーバによる液量調整の現象 88
3.6.4 ザーバ付 OHPの動作限界 89
3.7 3章の実験まとめと ザーバ付 OHPの熱輸送特性 90
3.8 結論 91
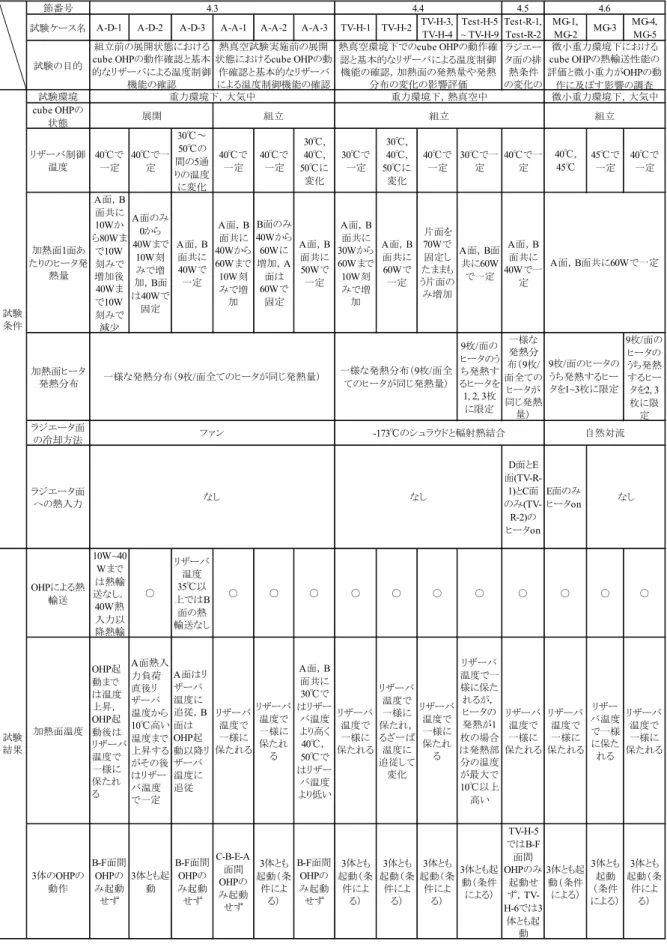
第4章 VC-OHPを適用した熱設計フ ー衛星
4.1 序論 132
4.2 試作モ ル 133
4.3 大気中試験 134
4.3.1 実験概要 134
4.3.2 実験装置 134
4.3.3 実験条件 135
4.3.4 実験手順 135
4.3.5 展開状態試験の結果と考察 135
4.3.5.1 試験 ースA-D-1の実験結果 136 4.3.5.2 試験 ースA-D-2の実験結果 136 4.3.5.3 試験 ースA-D-3の実験結果 136 4.3.5.4 展開状態試験の結果まとめ 136
4.3.6 組立状態試験の結果と考察 125
4.3.6.1 試験 ースA-A-1の実験結果 137 4.3.6.2 試験 ースA-A-2の実験結果 137 4.3.6.3 試験 ースA-A-3の実験結果 137
4.3.7 大気中試験結果まとめ 137
4.4 熱真空試験1(加熱面の発熱量,発熱分布変化の影響調査) 138
4.4.1 実験概要 138
4.4.2 実験装置 138
4.4.3 実験条件 139
4.4.4 実験手順 139
4.4.5 実験結果と考察 140
4.4.5.1 試験 ースTV-H-1 ~ TV-H-4の実験結果 140 4.4.5.2 試験 ースTV-H-5 ~ TV-H-9の実験結果 140 4.4.5.3 熱真空試験1の実験結果まとめ 141 4.5 熱真空試験2(ラ エータ面への熱入力の影響調査) 141
4.5.1 実験概要 141
iv
4.5.2 実験装置 141
4.5.3 実験条件 142
4.5.4 実験手順 142
4.5.5 実験結果と考察 143
4.6 微小重力実験 143
4.6.1 実験概要 143
4.6.2 実験装置 144
4.6.3 実験条件 144
4.6.4 実験手順 145
4.6.5 実験結果と考察 145
4.6.5.1 試験 ースMG-1, MG-2の実験結果 145 4.6.5.2 試験 ースMG-3の実験結果 146 4.6.5.3 試験 ースMG-4, MG-5の実験結果 146 4.6.5.4 微小重力実験結果まとめ 147
4.7 熱設計フ ー衛星への適用可能性 147
4.8 結論 149
第5章 結論 181
謝辞 184
参考文献 185
Appendix 宇宙放射線の影響評価
A.1 序論 ・・・ 190
A.2 実験概要 190
A.3 実験装置 191
A.4 実験条件 192
A.5 実験手順 192
A.6 熱的性能評価試験結果 193
A.7 クロマ グラフ ーによる組成分析 193
A.8 結論 194
v
Nomenclature
A
面積[m2]Bo
ボンド数cp
定圧比熱 [J/kg/K]D
管直径 [m]F
潜熱 [J/kg]G
質量流速 [kg/s/m2]g
重力加速度[m/s2]h
熱伝達率 [W/m2/K]K
熱コン クタンス [W/K]k
熱伝導率 [W/m/K]L
長さ [m]M
質量 [kg]MR
質量比N
OHP配管本数Pr
プラン ル数Q
熱輸送量(OHP全体) [W]q
熱輸送量(OHP配管1本あ た ) [W]Re
イノル 数t
時間 [s]T
温度 [K]u
速度 [m/s]V
体積 [m3]x
クオ テGreek symbols
φ
封入率ρ
密度 [kg/m3]σ
表面張力 [N/m]µ
粘性係数 [Pa s]Subscripts
A
OHP断熱部amb
周囲大気C
OHP冷却部cond
凝縮cr
臨界valve
バル 継手H
OHP加熱部heater
ヒータの発熱heatleak
ヒー ークin
OHPへの入熱l
液スラグlat
潜熱max
最大out
OHPか の排熱R
ザーバsat
飽和状態sen
顕熱total
OHP内全体tube
OHPと ザーバ間配管net
正味の熱輸送量v
蒸気プラグw
壁面1
第1章 序論
1.1 研究の背景
1.1.1 宇宙機の熱制御技術の課題
世界初の人工衛星スプー ニク1号の打ち か 遅 る と13年,1970年に日本 初めて の人工衛星 打ち た.打ち 地に因 おおすみ と 付け た の衛星 国 初めて熱設計を施さ た宇宙機 あ ,以来日本の宇宙機の熱制御技術 衛星開発の歴 の 中 試行錯誤や失敗,成 と共に発展して た. おおすみ (Fig. 1-1) の衛星本体 宇宙空間と 輻射断熱を図るためにアルミニウム バー 覆わ ていた ,軌道 衛星内部の電子機器 予測よ も高温と 衛星の に影響を及ぼす結果と た[1].約 1 年後に打ち た 次号機 た せい (Fig. 1-2) , のよう 姿勢 も太陽 熱入力及び宇宙空間への輻射によ る放熱 一様に るように,外表面全体を黒色塗装,内側 アルミ面という熱設計 採用さ た.
た せい 熱数学モ ルを用いた熱解析を実施し 設計 行わ た.
開発 進 につ 宇宙機 大型化し,また搭載機器の要求 複雑に そ を えるために新 しい熱設計や熱制御材 採用さ るように た.初期の宇宙機の熱制御材に 塗料や多層断熱 材(Multi-Layer Insulation, MLI) 主に使わ ていた ,1977年に打ち た た せい 3 号 (Fig. 1-3) 衛星内部の温度均一化のために初めてヒー イプ 搭載さ た. タノ ール 作動流体として封入さ た のステン ス鋼製のヒー イプ 軌道 正常に動作し ている と 確認さ た.また,1984 年打ち の中層大気観測衛星 おお (Fig.1-4) 軌道周回中の太陽 熱入力や機器発熱量の変化によ 衛星の温度ポテン ャル 大 く変化す るため,放熱量の調整 可能 ーマル ルーバー 搭載さ た.
とたび軌道 に打ち てしまうと交換や修理の出来 い宇宙機にと て搭載部品の 信頼性や実績 最重要とも言えるため,今日 も使用さ る熱制御材の多く 数十年前に開発さ
使用さ 続けているもの ある.一方 よ 高精度 観測等を行うために宇宙機に 高性能 電子機器や観測機器 搭載さ るように ,衛星の発熱量 以前に比 て増大している.
の搭載機器 その性能を発揮するために 非常に い温度範囲内にある必要 あ た ,空間 的 時間的温度均一化要求 あ た と,相反する 情を抱えている と 多く,限 た ソ ース 質量,電力 の中 効率的 熱設計を実現し け い.2015 年度打ち 予定 のX線天文衛星 ASTRO-H ,X線マイクロ ロ ータの冷却に用いる冷凍機の排熱に 後述するループヒー イプ(Loop Heat Pipe, LHP) を日本の科学衛星 初めて採用した[3] ,国 内 宇宙用実績 十分といえるLHP 存 し か たため海外製LHP 搭載さ ている.
国の熱制御技術の向 に必要 の ,従来の熱制御材を使用する け く新しい機能を持 つ熱制御材を開発し,その特性について余すと く手中に把握した 宇宙機へ適用する と あ ,そ 将来の宇宙開発の発展へとつ る.
1.1.2 ヒー イプとその発展
対流の無い宇宙空間において 深宇宙への輻射による放熱 殆 唯一の排熱方法 ある.その ため効率的に排熱を行うために ,ラ エータと呼 る排熱面と発熱機器とをいかに熱抵抗小
2
さく結合させるか 重要と る.ヒー イプ(Heat Pipe, HP) 高熱伝導率 おかつ中空構造 のため質量 小さいという宇宙用に適した優 た熱制御材 ある.
HP 主として金属製の密閉容器(コンテ )の中に作動流体 封 込め ているもの ,作 動流体 液及び蒸気の状態 適当 割合 共存している.Fig.1-5にHPの模式図を示す.HPの 一端を加熱しもう一端を冷却すると,熱 コンテ を通して作動流体に伝え ,液状態の作動 流体 蒸気に相変化する. の際の蒸発潜熱 蒸気に蓄え る.蒸気 コンテ の中空部分を 加熱部よ 圧力の低い冷却部に向か て流 ,冷却部 凝縮し液に る.凝縮すると に放出さ る凝縮潜熱 作動流体か コンテ へ伝え る.HP のように潜熱を利用して熱輸送を 行 ているために高い熱伝導率を得る と 出来る.流 を継続させるために 冷却部の作動流 体 再び加熱部へ戻 け い ,そのために毛細管現象を利用しているの HPのも う一つの特徴 ある.コンテ の内壁 溝状,多孔質材 ウ ック呼 る毛細管構造と てお ,冷却部の液 毛細管力によ 加熱部へと駆動さ る.
1942年にHPのアイ アを最初に発表したの 米国のGaugler[5] あ た 実用化さ る と か た.Gauglerの特許 録か 約20年後,米国原子力委員会のGrover Gauglerと 独 立 に HP を 発明し その実用化に 成 した[6].1967 年に 世界 初め て HP を 搭載 した衛星 Atlas-Agenda号 打ち た. のと のHP 作動流体として水を封入したステン ス鋼 製 ,軌道 も良好に動作した.
HPの初期の研究 主に宇宙用として進め た ,1966年に米国のRCA社 HPを商品化 してか 地 用としても広く利用さ るように ,現 宇宙機 もち ,コン ュー タ機器の中の発熱体の熱輸送 にも使わ ている.
HP 全長にわた てウ ック 存 するため,HP 長く るほ ウ ック内を流 る液 ける圧力損失 大 く る.ウ ックの細孔径を大 くす 圧力損失 小さく る ,そ の分毛細管力 小さく てしまう.基本的にHPの熱輸送量 その長さに依存し,大 熱量 を長い距離輸送させる と しい.また,コンテ の内壁に必 ウ ック 必要と るため, 大 角度 曲 た形状のHPやフ ル HP 加工 困 ある.
ウ ックを限 た部分にのみ配置する と の問題を解決したの LHP [7,8,9]と ャ ラ ーポンプループ(Capillary Pumped Loop, CPL)[9, 10] ある. ち も液 蒸発する部分
蒸発器 と凝縮する部分 凝縮器 と 分か てお ,蒸発器にのみウ ック 存 する. HP 1つのコンテ の中 蒸気と液 対向流として流 ているのに対し,LHP及びCPL 蒸 発器か 凝縮器へと蒸気 流 る配管と凝縮器か 蒸発器へと液 流 る配管と 分離さ て いる.LHPにもCPLにも液を一時的に溜めておく ザーバと呼 る液 め 付いている , その位置 大 く異 る.LHP Fig.1-6に示すように ザーバ 蒸発器の 流側近くに付い ている ,CPL Fig.1-7のように凝縮器の下流側に,その の通 細管 capillary を介して 取 付け ている.LHP 1980年代初頭に旧ソ連 発明さ ,その高い熱輸送能力やロバス 性か 宇宙用として早い段階か 実用化さ て た.一方1970年代に米国 発明さ たCPL 条件によ て動作 停止した 不安定に た するという問題 あ たため,次第に宇宙機 への適用 LHP 主流と てい た.LHP の技術 米国や欧州にも広 ,米国 1997 年にコロンビア号(スペース ャ ル)のミッ ョンSTS-83とSTS-94 LHPの軌道 実証に成 した[11]のを皮 に,2003年打ち の地球観測衛星ICESat [12], 2004年打ち の宇宙科 学衛星Swift[13] に搭載さ た.日本 も米国製のLHP ,国際宇宙ステー ョンに搭載さ
た全天X線監視装置MAXIの排熱に使用さ た[14]ほか,2006年打ち の技術試験衛星 く8号 に 初めて国産のLHP 搭載さ た[15, 16].
他に LHP の HP に優る点として,重力依存性 小さいという点 挙 る.一般的 HP 重力依存性 非常に大 く,蒸発部 に るよう 傾 つく( を ップヒー モード という)と動作し い と 多い[17] ,LHP ップヒー モード 特に低熱負荷時に動
3
作温度 高く る傾向 見 るものの,動作する と 報告さ ている[18, 19].Wolf , 作動流体にアンモニアを用いたLHPを熱負荷25 [W]時に傾けると動作温度 8 [K] 昇する 熱 負荷200 [W]以 動作温度の差 見 く たと述 ている[18].永井 アセ ンを 作動流体とした100W級の小型LHP 実験を行 た結果,30 [cm]程度の高さ あ 熱輸送能 力 重力に依 いとしている[19].LHP内を気液 循環する 動作する ために ,蒸発器部 分に存 するウ ック内 形成さ る毛細管力 ,気液 ループ内を通過する際の圧力損失に体 積力を加えた圧力に釣 合わ け い.LHP 通常,細孔径 μmオー ー HPに比
毛細管力の非常に大 いウ ックを用いるため,HPよ 重力依存性 小さい.
通常のHP 熱輸送量や動作温度 変化しても熱コン クタンス 一定の,固定コン クタン スHP(Fixed Conductance Heat Pipe, FC-HP) ある.一方 LHPやCPL 動作温度によ 熱コン クタンス 変わ うる可変コン クタンス(Variable Conductance)性を有する.可変コン クタ ン性によ 動作温度を能動的に制御 ,高精度 温度制御も可能 ある[20].温度制御に必要
電力 通常わ か あるため, ソースの限 た宇宙機に 適しているともいえる. 可変コン クタンス性 通常のHP も非凝縮性ガス Non-Condensable Gas, NCG を添加す る と 持たせる と ,可変コン クタンスヒー イプ Variable Conductance Heat Pipe, VC-HP と呼 る.VC-HP ,1960年代に先述の米RCA社にて金属製コンテ のHPの ー ル方法を模索している途中 NCGをHPに混入させた と かけと 発明さ た.Fig.1-8 に示すようにVC-HP 通常のHPのコン ン 側にNCG 封入さ た ザーバ 取 付け てお ,NCG コン ン 側に押し流さ コン ン の作動流体の凝縮量 調整さ る と
HPの動作温度に対する熱輸送量 調整さ るというもの ある.蒸発部への熱負荷量 増し 蒸発部の温度 昇すると Fig.1-8 の下図のように NCG 圧縮さ コン ン の凝縮量 増 加する. によ ヒー イプのコン クタンス 増加し結果として蒸発部の温度 低下する. 逆に蒸発部への熱負荷量 減少した場合 ,コン ン 内のNCG体積 増加し凝縮量 減少す るためにコン クタンス 低下する.VC-HPの実用化 1970年代か 始ま ,多くの衛星 搭 載さ ている[22].近年 欧州の国際宇宙ステー ョン補給機(Automated Transfer Vehicle, ATV) に40本ものVC-HP 搭載さ た[23].日本 1989年打ち の技術試験衛星 く5号 に,作動流体に タノールを用いNCGとしてアル ン及び ウムを封入したステン ス鋼製 のVC-HP 搭載さ ,軌道 にて正常に動作する と 確認さ た[24, 25].
1.1.3 自励振動ヒー イプの動作原理と特性
自励振動型ヒー イプ(Oscillating Heat Pipe, OHP)[26] ,加熱部~冷却部間を十数回往 す る外径(直径)1~2[mm]程度の細管か 構成さ てお ,細管の中に封入さ た作動流体 ,加熱 部における蒸発と冷却部における凝縮を伴い 自励振動によ て往 運動する と ,加熱 部か 冷却部へ熱 顕熱および潜熱の形態 輸送さ るもの ある.OHPの概略図をFig.1-9に 示す.OHP内の作動流体 ルス的 振動流として流 る とか ,Pulsating Heat Pipe, PHPと も呼 る.HPやLHP, CPLと 対照的に,OHP 1990年代に日本の中小企業の と の技術 者,赤地によ 宇宙利用と 全く独立に発明さ た[27, 28].
他のヒー イプと 異 OHP 液の輸送のためにウ ック 用い い ,気液の自励振 動を起 すために管内にFig.1-10のように気液 プラグ状に分か る必要 ある.液柱を液スラ グ,気泡を蒸気プラグ 又 バ ル と呼ぶ.管径 液の表面張力 重力に十分打ち勝てるほ 小さく け い.一般的に ,重力と表面張力の釣 合いを表すボンド数 �� 4 以 下に るよう 管径に設定する とさ ている[29]:
(1-1) ) 4
( 2
− ≤
= g
ρ σ ρ
DBo l v
4
,� 重力加速度,��, �� そ 液密度および蒸気密度,� 管径,σ 作動流 体の表面張力 ある.式(1-1)よ 配管の最大径 式(1-2) 表さ る:
(1-2)
OHP 内を真空に引く して大気等 NCG の残留 い状態 作動流体を封入すると気液 Fig.1-9 のように管内に分布する.OHP の一端を加熱部(蒸発部)としもう一端を冷却部(凝縮部) とする.加熱部に熱負荷を与えると加熱部内の蒸気プラグの圧力 昇する.液スラグの前後の 蒸気プラグ 圧力差 生 ,液スラグと蒸気プラグ 圧力の低い冷却部に向か て流 る.冷却 部 凝縮 起 るため蒸気プラグの圧力 下 る.管の両端における相変化を伴う蒸気プラグ の圧力及び体積の変化 気液の振動を引 起 す.加熱部への熱負荷 大 く ると液スラグの 速度 速く ,慣性力 十分大 く ると液スラグ 管の曲 部を超えて隣のターンへと移 動する. のようにして次第に振動流か 循環流へと流 の形態 移行する.加熱部に加え た熱負荷 相変化の際の潜熱と,相変化せ に伝熱面間を移動する液スラグの顕熱によ 冷却部 に輸送さ る ,顕熱による熱輸送 支配的 あるという報告 さ ている[29-31].
相変化 起 る ニ ムについて 過去の研究によ 複数の提案 さ ている ,蒸気プ ラグと壁面の間に薄い液膜 存 しその液膜 蒸発と凝縮 行わ るという見方 近年の主 流 ある.液膜の発生機構についても諸説あ ,Shafii [32] Fig.1-11 に示すよう 作動流体 の高い表面張力による液膜の発生を述 ているのに対し,長崎 [33] 液スラグ 管内を移動す る際に管内壁 濡 ,そ 薄い液膜と て残る とを実験結果を元に説明している. また, Ma[34] ,凝縮部にて蒸気プラグ内の蒸気 壁面 凝縮して液膜 形成さ るとして熱輸送量 を計算し実験結果との比較を行 ている.
作動流体 OHPの熱輸送性能に大 く影響する.表面張力 式(1-2)に表さ るように配管径 に影響し,表面張力 大 いほ 配管径を大 く出来るため,伝熱面積 よ 大 く 最大熱 輸送量 大 く る.た しOHPの安定した動作を維持するために必要 熱入力量も大 く る.流体の粘性 大 いと液スラグと壁との間のせ 断応力 大 く 圧力損失の増大につ
るため,粘性 動粘度 小さい方 良い.潜熱 小さい方 作動流体の蒸発 起 やすく 気液の動 早く るために熱輸送能力 大 く る.そ に対し,OHP の熱輸送に 顕 熱 大 く影響するため比熱 大 い方 よ 大 熱輸送 可能と る. のほか,通常の HP と同 ように配管材料との化学的安定性にも注意する必要 ある.水 アルコール類 フロン系液体 OHPの作動流体としてよく使用さ ている ,近年の研究 nanofluidを 用いた研究もあ ,管との熱伝導 大 く るために熱輸送能力 向 するという結果 報告さ ている[35]. nanofluid と 大 さ ノ ーターオー ーの微粒子( ノ粒子)を混 た流体を 指す.文献[35] 濃度100 [ppm] ノ粒子径20 [nm]の銀の ノ流体 熱輸送性能に向 見
たと述 ている.
OHP 基本的に 細管のみか 成るの ,自由 幾何形状 の熱輸送 可能 あ ,形状に 合わせる と 伝熱面積を大 く取る と 出来る.また,一般的 ウ ック型ヒー イプに 比 て伝熱経路の制約 小さく,加熱部と冷却部 離 ているよう 場合 も適用 容易 ある. ウ ック不要のスムース 管のみという単純さか 低コス の製造 可能 あ ,宇宙用 け
く地 民生用としても広い適用 期待 る.
OHP LHP同様にHPよ も重力依存性 小さく,断熱部長さ及び伝熱部長さ 100 [mm]の OHP ップヒー モード も動く と 報告さ ている[36].一方 数ターンのOHP 水平 状態 も動作し いという報告もある[31].Charoensawan [30] ,作動流体にそ 水 エ タノール R123を封入率50% 封入した,ターン数5~23,管内径1 [mm]また 2 [mm]の銅製
)
2 (
v l
crit
g
D = ρ σ − ρ
Dcrit
5
閉ループ型OHP 水平状態か +90度の垂直状態(ボ ムヒー 状態) 実験を行い,管径 細く ターン数 大 いほ 重力依存性 小さく るという研究結果を報告している.Maezawa [37]
,作動流体にR142bと水を用いた40ターンの開ループ型銅製OHP 実験を行い,R142bを 封入率50% 封入した場合 ップヒー 状態も含め全ての設置傾斜角度 OHP 動作したと 報告している.た し作動流体 水の場合 ップヒー 状態 動作し か たよう あ , OHPの重力依存性 作動流体によると考え る.先述のShafii [32] OHPの気液の運動に 関する解析を行 た結果,OHPの運動に対する重力の効果 無視 るとしている.
1.1.4 OHPの先行研究
当初OHP Fig.1-12(a)に示す開ループタイプのもの 提案さ た ,Fig.1-12(b)に示すよう 閉ループタイプのものについても研究 行わ た.開ループ型OHPも動作 する ,気液の流
循環流に る閉ループの方 液の流 速く,顕熱による熱輸送量 多く るため閉ループ 型OHPの方 性能 良いという報告 さ ている[38].
同様の目的 さ に循環流を誘起するために逆止弁を用いたOHPも提案さ た.Miyazaki [39] 同 閉ループ型の OHP も,逆止弁の無いOHP ボ ムヒー 状態 しか動か い , 逆止弁付 のOHP 水平状態 け く ップヒー 状態 も動作する とを実験結果か 報 告した.水平設置状態 も動作する逆止弁の無いOHP あ ても,最大熱輸送量 逆止弁付 OHP の方 大 く る と 実験的研究か 導か ている[39,40].また,逆止弁の有無 熱伝 導率にも影響する.安藤 [41]によると逆止弁を1ターンに1個配置した閉ループ型のOHPの 方 無いものよ 約4倍実効熱伝導率 大 い.
OHPの熱輸送能力に影響するの 1.1.3項 述 た作動流体の物性値 け く,その封入率 やOHPの配管径,ターン数,配管長さ,重力環境下において 設置の傾斜角度 多岐に渡る. OHPの発明以来, の ラ ータ のようにOHPの性能に影響するのかを調 る主に実 験的研究 幅広く行わ た.
Charoensawan [30] 配管径 式(1-2) 表さ る最大径以下 あ 配管径 大 く るほ 熱輸送量 大 く ,ターン数についても増加するほ 同様の傾向 ある とを実験的研究 によ 示した.OHP 内の蒸気プラグと液スラグ 配管内にラン ムに配置さ ているため,配 管 とに気液の圧力 異 る. のターン間の圧力差によ さ に振動流 誘起さ る と 熱 輸送能力の向 につ ると考え ている.
液の封入率 性能に及ぼす影響について 多くの実験例 報告さ ている.Khandekar [42] エタノールとR-123を作動流体に用いたOHP 実験を行い,そ 封入率 22-55%, 35-60% 時に熱輸送量 最大に ると述 ている.Lin [43] 作動流体にFC-72を用いたOHP 50% 最適 封入率 あると導 ,さ に封入率 32% 低負荷 もドライアウ 起 る とを 報告した.
OHP の物理現象 複雑 あ そ を解明するための研究も多く さ て た.Hosoda [44] 蒸気プラグの伝搬について実験及び数値計算による研究を行い,配管内に離 て存 する 2 つ の 蒸 気 プ ラ グ に つ い て 一 方 縮 し 始 め る と 他 方 成 長 し 始 め る と を 明 か に し た . Khandekar [45] OHP内の流 を可視化する実験を行い,流 スラグ流か 環状流へと変化 する と,その変化 加熱部への熱負荷量及びOHPを設置する傾斜角度に依存すると結論 け た.Wilson [46] nanofluidを水に加えて作動流体としたOHPについて中性子ラ オグラフ
―を用いた可視化実験を行い,50 [W]の低負荷熱条件 気液の自励振動 ラン ム 間 的 ある 熱負荷を300 [W]ま 増加させると定常的に観察さ ると報告している.
物理現象のモ ルに関する研究 大 く分けて2通 見 る.Miyazaki [47, 48] 自励 振動の機構 圧力とボイド率の相互励振によるもの あ ,振動流の場合 液スラグの振動の位
6
相 異 る とによ 波 形成さ るとし,液スラグの平衡状態か の変位 � 式(1-3)のよう に波の式 表さ ると提案した:
(1-3)
密度
ρ
の変化 振動流の変位の勾配によ 定ま ,次式 表さ る.2 )
0
sin(
ρ π
ρ
+
−
=
=
wt
kx
dx
dy
(1-4)
液スラグの波によ て形成さ るボイド率
α
密度の変化と逆方向に変化するため次式 表さ る:(1-5)
振動流の変位と圧力振動 Navier-Stokesの式 表さ る.
µ
e 線形化した減衰係数を示 す.(1-6)
式(1-6) 左辺 慣性項,右辺第二項 粘性項 ある.慣性項を
0
2 2
=
∂
∂
t
y
とした場合,式(1-6) 次式 表さ る.
t
y
x
p
e
∂ ∂
∂ =
− ρ 1 ∂ µ
(1-7)式(1-7)を解くと,ボイド率の分布によ てお る圧力振動 式(1-8) 表さ る:
(1-8)
式(1-5), (1-7)よ 圧力振動とボイド率に
π
/2の位相差 ある と わかる. 式(1-6)について粘性項を0
1 =
∂
− ∂
x
p
ρ
とした場合,式(1-6) 次式 表さ る.
x
p
t
y
∂ ∂
−
∂ =
∂ ρ
1
2 2
(1-9)
式(1-9)を解くと,圧力 次式 表さ る.
(1-10) )
0sin(kx wt y
y= −
2)
0sin(
α π
α
= kx−wt−)
0sin(kx wt p
p= −
2)
0 sin(
+
π
−
= p kx wt p
t y x
p t
y
e ∂∂
∂ −
− ∂
∂ =
∂
µ
ρ
12 2
7
(1-5), (1-9)式よ 圧力振動とボイド率に
π
の位相差 ある と わかる.以 よ ,粘性項 の影響 大 く慣性項 無視 る場合 圧力振動とボイド率 Fig. 1-13(a)左図に示さ るよ うに位相差π
/2と ,慣性項 大 く 粘性項の影響 無視 るほ 小さく た場 合 Fig.13(c)左図に示さ るように位相差π
と る.慣性項の増大 液スラグの速度の増加を 意味する.OHPへの入熱量 大 く ると液スラグの速度 大 く る.OHPへの入熱量 増 すとFig.1-13(a)か (b)を経て(c)の状態に ると考え る. Fig.1-13(a), (b), (c)の左図を∆p−∆α 線図に表すと,OHPの1ターンの管における熱 イクル そ Fig.1-13(a), (b), (c)の右図の ように表さ る.Fig.1-13の(a), (b)右図の また 楕 の面積 液スラグの自励振動によ 得る を示している ,(c) 面積 消滅し 失わ ている.OHPへの入熱量 増加し 速度 大 く ると最終的に(c)の状態に ,自励振動 止ま てしまう とを示している[49].
一方Shafii [50] 1つの液スラグの前後の蒸気プラグの状態 質量,圧力,温度 変化と液 スラグの温度及び速度変化か 気液の運動を求める方法を提案している.
OHPの発明か 数年 経過した2000年以降に ,OHPの宇宙機の適用を目指した研究も行わ て た.OHP の宇宙機への適用を目指して微小重力実験 行わ , ラボ ックフライ に よる0.02g 環境下 も動作した と 報告さ ている[51].実際に宇宙機へ適用さ ,宇宙 初 めて動作に成 した OHP 2002 年に打ち た宇宙航空研究開発機構(Japan Aerospace Exploration Agency, JAXA)のマイクロラ ッ 1号機 ある.打ち 直後 適正 熱負荷範 囲においてOHP 正常に機能する と 確認さ た[52] ,その後起動 確認出来 く た. 次に宇宙実証さ たOHP ,10年後の2012年に打ち た同 くJAXAの小型実証衛星 4型 SDS-4 に搭載さ たもの ある[53].作動流体としてHFC-134a 封入さ た,ターン数 5 重量260 [g]の小型のOHP ある ,24時間連続して熱負荷をかけた状態 も全く変化する
と く動作 継続した.
地球の重力圏内 ある 高度35 [km] OHPの動作に成 した例もある.Okazaki [54] 極 の気球実験に搭載する,宇宙線中の反粒子の高感度 査を目指すSi(Li)検出器の排熱に全 長5000 [mm]以 にも渡る大型のOHPを使用した設計を提案している.2012年に その 前実 証として全長約1000 [mm]のOHPを気球に搭載し,高度35 [km] 正常に熱輸送 行わ ている
とを確認した[55].
1.2 研究の目的
ま 自励振動ヒー イプの研究 実験 理論共に広く さ て た ,い も固定 コン クタンスのOHPの研究 ある OHPを可変コン クタンス化した研究例 い.可変コ ン クタンスOHP (Variable-Conductance Oscillating Heat pipe, VC-OHP) 実現 ,熱負荷に 応 て熱輸送量 変わるため,温度制御に必要 ソースを削減する と る.少 い ソース 能動的 温度制御を行う と 可能に 宇宙用熱制御材として非常に有効 ある. 1.1.1項 述 たよう 宇宙機の熱制御の課題を解決する熱制御材としてVC-OHPを提案するた めに,OHP を可変コン クタンス化するための研究を行う.本研究 ,固定コン クタンス OHP(Fixed-Conductance Oscillating Heat Pipe, FC-OHP)に ザーバを付加するによ 可変コン ク タンス性を与える とを提案し, ザーバを付加する と 可変コン クタンスと る ニ ムについて明 かにする. ザーバ内気液分布と熱輸送特性の関係を論 る と , ザー バ付 自励振動ヒー イプ 無重量環境においても動作する とを示す.また, ザーバを 温度制御する と OHP の熱輸送特性 自 的に制御さ OHP の動作温度 制御 る と を示す.
VC-OHPを実機に適用するにあた ,その動作限界 のように決まるかを把握する と 重
8
要 ある.動作限界と OHP 内の気液の自励振動 停止し OHP 熱輸送 バイスとして機能 し く る状態を指す.本研究 OHP 最大限に熱輸送する と る限界について研究 を行う.動作限界時の熱輸送量を超える熱負荷をOHP に与えると OHP 機能喪失してしまう ため,OHPの動作限界 のよう ニ ム 起 るかの知見を得る と ,OHPの熱コン
クタンス 固定 あるか可変 あるかに関わ OHPを使用するにあた 非常に重要 ある. 従来の ザーバ無のFC-OHP 動作限界に至る現象を明 かにした , ザーバ付 OHP 動作限界を迎える ニ ムについて示し,両者の現象の違いの比較を行う と ザーバ付
OHPの熱輸送特性の特徴を明 かにする.宇宙への応用において ザーバ内の気液分布 重要 ある , ザーバ内の気液分布によ て可変コン クタンス性 失わ い とを示す.
の とによ ザーバ付 OHP 微小重力環境においても動作する と 示さ る.また, ザーバを温度制御する と OHPの熱輸送特性 自 的に制御さ ,動作温度 制御可能 と 示さ る.さ に, ザーバ付OHPの宇宙機への応用例として,VC-OHPを衛星構体 ネル全面に張 巡 せる と のよう 外部熱入力条件 も対応可能 熱設計に拠 い自 由 機器配置を可能にする 熱設計フ ー衛星 を提案し,実現性を評価する.
1.3 本論文の構成
本論文 5章 構成さ る.そ の章の概略を次に示す.
第1章 ,宇宙機の熱制御技術の課題を明 かにした 自励振動ヒー イプの原理と宇 宙用熱制御材として優 た特性を述 ,自励振動ヒー イプの研究の現状を示し,本研究の目 的について述 た.
第2章 ,FC-OHPの動作限界の ニ ムについて述 る.
第3章 , ザーバ付 OHP VC-OHPとして動作する とを示す. ザーバ内の気液分 布 動作に及ぼす影響について述 る. ザーバ温度制御によ OHPの動作温度制御 る とを示す.自 的に熱輸送制御 さ る ニ ムについて述 る. ザーバ付 OHPの 動作限界について明 かにし,FC-OHPとの現象の違いの比較を行う.
第4章 , ザーバ付 OHPの特性を活かした熱設計フ ー衛星を提案する. 第5章 、結論を述 る.
Appendix ,自励振動ヒー イプの宇宙空間における耐性を示すものとして,放射線照 射試験の内容と結果について述 る.
9
Fig.1-1 おおすみ の概略図[2].
Fig.1-2 た せい の概略図I[2].
10
Fig.1-3 た せい3 の概略図[2].
Fig.1-4 おお の概略図[2].
11
Fig.1-5 HPの概略図[4].
Fig.1-6 LHPの概略図 [8].
左図 LHPの全体を,右図 蒸発器の断面図を示す.
12
Fig.1-7 CPLの概略図 [9].
左図 CPLの全体を,右図 蒸発器の断面図を示す.
Fig.1-8 VC-HPの概略図 [21].
下図 図よ も蒸発器への熱入力 増大した状態を示す.
13
Fig.1-9 OHPの概略図 [29].
Fig.1-10 OHP内の蒸気プラグと液スラグ [30].
Fig.1-11 液の表面張力によ 生 る液膜[32].
14
Fig.1-12 OHPの形状: (a) 開ループ, (b) 閉ループ. [31].
15 (a)
(b)
(c)
Fig.1-13 OHPの圧力変化(
∆ p
) ボイド率変化(∆ α
)と∆p − ∆ α
線図.(a) 慣性項を無視した場合,(c) 粘性項を無視した場合,(b) (a)か (c)への移行状態を示す. そ ,左図 位置に対する
∆ p
と∆ α
とを示し,右図∆p − ∆ α
線図を示す.16
第2章 FC-OHP の動作限界
2.1 序論
ある一定の条件のもと OHP に熱負荷を与えたと に,そ 以 大 い熱負荷を与えると OHPの内部の自励振動 停止しOHP 熱輸送材としての機能を失うという限界の状態 熱輸送 能力の動作限界 あ ,その限界時の熱輸送量 最大熱輸送量と定義さ ている.先行研究 FC-OHPの熱輸送能力の動作限界をい も最大熱輸送量 評価している.熱負荷を与えた状態
OHP 機能喪失すると,加熱部温度の急激 昇と冷却部温度の急激 下降 同時に起 る. の 状態 ド ライアウ と呼 る.ド ライアウ 続 くと加熱 部温度 非常に高 温に OHP内圧 昇し,OHPの耐圧よ 大 く た場合 損傷を引 起 す.また,OHPによる 熱輸送 く ると機器 高温に 機器 損傷する恐 もある.実機 使用する際に 動 作限界に至 い範囲 使用し け いため,OHP の動作限界 のように決まるの かを明 かにする と 重要 ある.
1.1.4項 示したように,Miyazaki [49] OHPへの入熱量 増加し液スラグの速度 大 く ると最終的に自励振動 止ま てしまう とを示唆した. FC-OHP の極限の動作限界 あると考え る , の動作限界に至る入熱量 非常に大 いと予想さ ,実際のFC-OHP
も と低い熱入力条件時に の要因 動作限界に至るの いかと考え る.
先行研究か ,最大熱輸送量 FC-OHP 内部の作動流体の封入率に依存し,過去の実験的研 究か 50%前後 最も最大熱輸送量 大 く 性能 よいとさ ている[43].しかし, 50%前後 最も最大熱輸送量 大 く るのか,封入率 50%以下或い 以 においてそ
のよう 現象 FC-OHPの動作限界に至るのか 明 かにさ てい か た.
以 を踏まえて,本研究 ,FC-OHP 動作限界に至る物理現象を明 かにし,動作限界 封 入率に依存する原因を示す とを目的とする.
2.2 動作限界時の動作温度
2.2.1 実験概要動作限界時のOHPの挙動を実験的に調 るために,OHPをスター アップか ドライアウ するま 熱負荷を変化させて動作させ動作限界時の熱輸送量と動作温度を測定した.そして,作 動流体の封入率を変えて測定結果を比較する と ,動作限界時の OHP の挙動の封入率依存性 を調 た.また,冷却部の温度条件に対する依存性も調査した.最大輸送量 FC-OHP の熱輸 送性能として一意に決まるもの く,OHP 冷却部の排熱条件 に依存すると考え る ため ある.本実験 OHPを大気圧下の恒温槽試験室内に設置して行 たの ,冷却部の温度 条件と 試験室温度条件を指す.
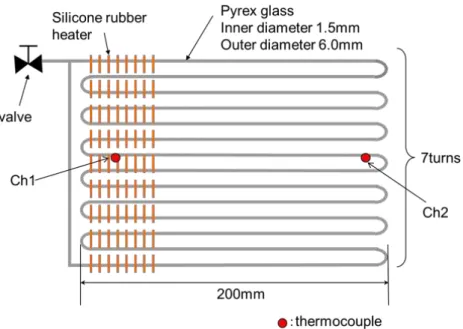
2.2.2 実験装置
本実験 使用したFC-OHP(以下,単にOHPとする) ,JAXAと福井工大 試作したもの[40]
,外径1 [mm],内径0.8 [mm]の1本のステン ス(SUS)管 30回 曲 15ターン ,管 の両端 接続さ た閉ループ形状と ている.OHPの概略図をFig.2-1に示す.他の実験 使 用したOHPと区 するため,以下SUS OHPと示す.SUS OHP 102.5 [mm]×100 [mm]の加熱 部、加熱部と同 寸法の冷却部、95 [mm]×100 [mm] の断熱部か 成る.本実験 ,加熱部に 熱入力を与え るようにヒータを取付け,加熱部と断熱部 周囲大気と断熱するため断熱材 覆 ている.冷却部 周囲大気へ放熱 るように温度制御装置や断熱材等 何も取 付けてい
17 い.
断熱部分のSUS管に ,逆止弁 各ターンに1個の割合 ,流 の向 冷却部か 加熱部 へと るように取 付け ている. 蒸気よ 質量流量の多い液 加熱部へ流 込 よう にする と 熱輸送性能を向 させる目的 ある.逆止弁の概略図をFig.2-2に示す.逆止弁の 取付け部 加熱部近くの断熱部と ている.逆止弁に 直径0.5 [mm]のセラミック球 使用さ ている.逆止弁の一端 ,ボールと管の間を液 流 つつボール 流 いようにするために 加工 さ ている.にもう一端 ,液 流 いようにするためにスウ ー ング加工 を施しテー ーをつけている.
SUS OHPの加熱部又 冷却部と るループ両端に アルミニウム板 SUS管を挟み 状 態 拡散溶接にて接合さ ている.アルミニウム板の大 さ ,加熱部,冷却部共に102.5 [mm]
×100 [mm],厚さ3 [mm]と てお ,両アルミ板の四隅に支柱を 止めする と ,OHP 全体 支え ている.加熱部のアルミニウム板下面に 大 さ80 [mm]×80 [mm]のポ イミ ド ー ヒータ 粘着材 貼 付け ている.ヒータの抵抗値 100 [Ω] ,ヒータに 電圧 を印加するために 定プ ョン製の直流電源PK120-3.3を接続している.直流電源の電圧変 動率 0.12 [V] ある.加熱部と断熱部 周囲への熱 ークを防 ためポ エステル繊維の断熱 材 覆わ ている.
温度測定のためにOHPに Fig. 2-1に示すように計8点の熱電対 取 付け ている.加 熱部に アルミ板内の温度分布を測定するために 面に3点,ヒータそのものの温度を測定する ために加熱部下面ヒータ の中央に1点の熱電対を取 付けている.冷却部に 温度分布を測定 するために 面に3点,下面中央に1点の熱電対を取 付けている.い も熱電対 T型 線形0.2 [mm]のものを使用している.本実験における熱電対の精度 クラス2相当 T型熱電対 の場合 ±1℃ とする.熱電対及び直流電源の電圧 電流モニタ用電線 全て Graphtec 製 ー タロガーGL800に接続さ る. ータロガーGL800のT型熱電対の測定精度 0.1% of rdg ± 0.5℃(rdg = reading, 測定値) ,電圧の測定精度 ±0.1 % of F.S. (F.S.=フルス ール,本実験 10 [V]) ある.
OHPに封入する作動流体 HFC-134a (1,1,1,2-Tetrafluoroethane) を採用した.HFC-134aの 20 [℃],40 [℃],60 [℃]の飽和状態における物性値[56]をTable 2-1に示す.HFC-134a 室温 の飽和蒸気圧 0.5 [MPa]と比較的低い正圧 あ 液の封入 行いやすい とや,60 [℃] も飽 和蒸気圧 2 [MPa]以下 あ 高温に てもOHPの損傷を引 起 すほ 内圧 高く 実機に応用する際の動作温度 限 安全に使用可能 ある と,容易に入手可能 と か 本実験における作動流体として選定した.
本実験に使用したOHP 幅3 [m] 高さ2.6 [m] 奥行4 [m]の大型恒温槽試験室内にFig.2-4 に示すように水平に設置し,試験室内部の雰囲気温度を変える と OHP冷却部の温度を変更 させた.恒温槽内 大気圧 あ ,試験室外に取 付け た冷凍機及び加温ヒータ 温度調節 さ た乾燥空気 攪拌フ ン 送 込ま 室内外を循環する とによ 試験室内の温度 み1℃ 以内の精度 制御さ る.吹 出し口か 乾燥空気 流 る方向と水平方向にOHPの配管 向 くように,かつ冷却部側 加熱部側よ も吹 出し口に近く るようにOHPを設置した.熱線 式風速計を用いて水平に設置したOHPの冷却部アルミ板 の風速を測定したと 0.5 [m/s]程 度 あ た.実験中 ,乾燥空気の流 と垂直方向にOHPか 約100 [mm]離 た箇所の気温を 熱電対 測定した.熱電対先端の高さ OHPの高さとほぼ等しく るようにした.測定に使用 した熱電対 OHPに取 付けた熱電対と同 型式のもの ある.OHP以外の実験装置,す わ ち ータロガーと直流電源 全て大型恒温槽外部に設置した.
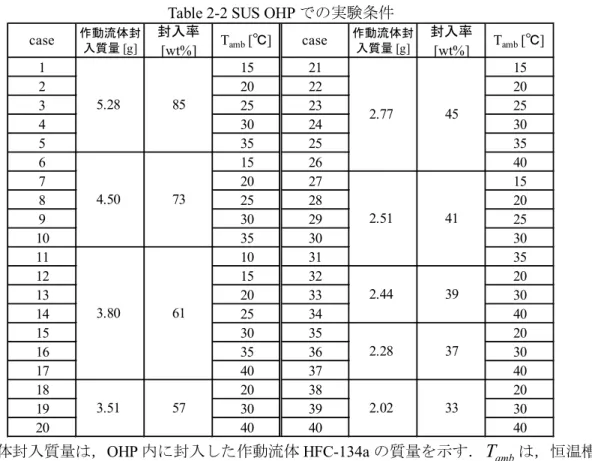
2.2.3 実験条件
実験条件をTable 2-2に示す.作動流体の封入率を33[wt%] か 85 [wt%]ま 変え,各封入率 のOHPにてOHP ドライアウ するま 実験を行い,動作限界時のヒータ発熱量とOHP各部 の温度を測定した.封入率に相当する作動流体の封入質量 ,HFC-134aの飽和温度20 [℃]の液 密度1125[kg/m
3]とOHP内液体積5.1[c m3]か 計算 求めている. ち,OHP内体積 全て20[℃] のHFC-134a 満たさ た場合(封入率100[wt%])の液質量に封入率をかけて,実験条件時の作動
18
流体封入質量を決定している.初めに封入率85, 73, 61, 45, 41[wt%]の条件にて恒温槽試験室雰囲 気温度を5 [℃] 刻み 変化させて実験を行い雰囲気温度と動作限界の相関を調 た後,さ に, 主に低封入率時の動作限界の現象を調 るために残 の封入率条件 58, 44, 40, 37, 33 [wt%]にて 実験を行 た.そのため封入率条件 58, 44, 40, 37, 33 [wt%] 試験室温度条件 最初の実験よ
い刻み 10[℃] 実験を行 ている. 2.2.4 実験手順
OHPを大型恒温槽に設置する前にOHP内に作動流体HFC-134aを封入した.OHP の元弁の先 に真空ポンプと HFC134a ボンベおよび開放弁を並列につ ,最初に真空引 を行うと同時に OHPを冷却する. 真空引 終了後にHFC-134a ボンベか 作動流体をOHP内に封入した後, 実験条件の封入率に るように不要 作動流体を排出した.詳細 手順 以下の通 ある.
1) 内部に作動流体 何も入 てい い状態 OHPの質量を測定する.
2) OHP元弁の先にHFC-134aボンベと真空ポンプをFig.2-3に示すように接続する.
3) 室温 大気圧環境下にてボンベ元弁,解放弁を閉 た状態 真空ポンプを起動させポンプ 元弁,OHP元弁を開けてOHP内部の真空引 を行う.ポンプの排気能力 50 [litter/min.] ある. Fig.2-3中の ルドン管の読み 最小値 ある-0.1[MPa]を指しているのを確認し15分間真空引
した後,ポンプ元弁を閉める.
4) 3)の真空引 の間,OHPのアルミ板 に氷を載せ板を0 [℃]付近ま 冷却する. 5) ボンベ元弁を5分間開放した後,ボンベ元弁とOHP元弁を閉める.
6) 開放弁を開け,配管内に残 たHFC-134aを排出させる. 7) 継手を外しOHPをOHP元弁 と取 外す.
8) 1)と同 形態にてOHPの質量を測定する.
9) 決め た封入率に るように質量を測定し 不要 作動流体を OHP 元弁か 排出 させる.
OHP を大型恒温槽試験室内に設置し加熱部へ熱負荷を徐々に加えドライアウ するま 熱負 荷を増加させた.ドライアウ 後 熱負荷を減少させたのち元の状態ま 戻すという実験を繰 返し実施した.熱電対 測定している加熱部の温度全て 急激に 昇し,同時に冷却部の温度 全て下降するという傾向 続 加熱部 面の温度 110 [℃]を超えた場合にドライアウ と判定 し,加熱部の 昇を止めるために加熱部のヒータを た.ヒータoff後加熱部の温度 下 る とOHP 自然に起動する ,OHPの起動を確認した後再びヒータを onにした.実験 全ての 条件において再現性確認のために2回 つ実施した.実験前後のOHPの質量を測定する と 実験中に封入率 変化してい い とを確認した.
OHP の正味の熱輸送量
Q
net ,式(2-1)に示すように加熱部のヒータの発熱量heater
Q
か ヒーーク量
Q
heatleakを差し引く と 求め る.Qnet =Qheater −Qheatleak (2-1) 一般的に動作限界時の
Q
net 最大熱輸送量Q
maxと定義さ る.ヒータの発熱量 ヒータにかかる電圧値と電流値か 求める.ヒー ーク量 以下に示す方 法によ 実験的に見積も た.
ザーバ無しのOHP配管内か 作動流体を抜いた後,配管全体の真空引 を行 た.OHP 大型恒温槽外の室温環境下にて水平に設置した.加熱部と断熱部 断熱材 覆 た.OHP の加 熱部ヒータへ0.5 [W],2 [W],4 [W]の3通 熱負荷を与え,加熱部温度と冷却部温度の計測 を行 たと ,加熱部温度とヒータ電力の相関 Fig. 2-5のように た.冷却部の温度 い の条件においてもほぼ25[℃] 一定 あ た.Fig.2-5のグラフか 最小二乗法によ 式(2-2) のa, bを見積も た.式(2-1)を用いて各実験条件時の加熱部温度
T
Hか ヒー ーク量を見積も た.
19
002 . 0 294 . 4
00007 . 0 1784 . 0
±
=
±
=
−
= b
a
b aT
Qheatleak H
(2-2)
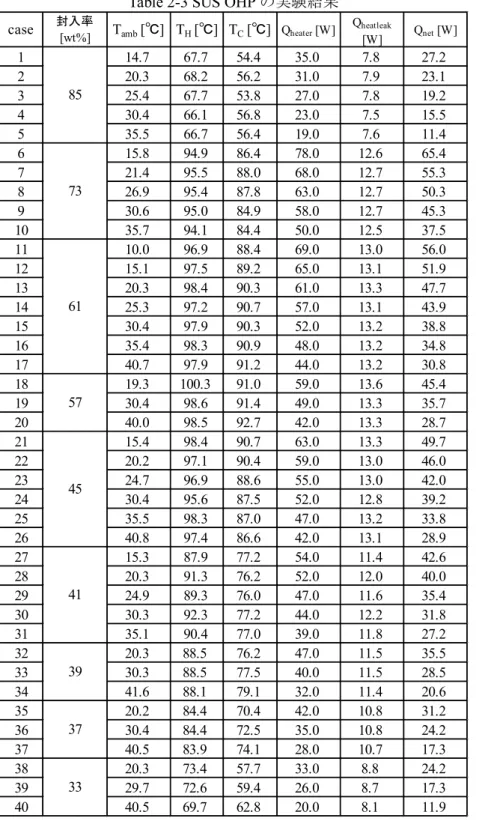
2.2.5 実験結果
各実験 ースにおける実験開始か 終了ま の時系列の温度及びヒータ発熱量をFig.2-6に示 す.また,各実験 ースの動作限界時の恒温槽試験室内雰囲気温度
T
amb,加熱部温度T
H,冷却部温度
T
C,ヒータの発熱量Q
heater,ヒー ーク量Q
heatleak,正味の熱輸送量Q
netをTable 2-3に示す.Table 2-3中の値のうち,動作限界時における各封入率時の
T
ambに対するQ
net,つまQ
maxをFig.2-7に示す. の封入率条件においてもT
amb 昇するにつQ
max 減少していると わかる.熱平衡時,OHPへの入熱量
Q
inQ
outに等しく,次式 成立する.Qin =Qout =Qnet (2-3) 本実験 冷却部を強制対流によ 冷却しているため,
h
を強制対流の熱伝達係数とすると,Q
out 冷却部の面積A
とT
amb,T
Cか 次式によ 求め る.Qout =h(Tc −Tamb)A (2-4)
A
全ての実験を通して0.01 [m2] 一定 ある.h
空気の熱伝導率等の物性値と流速か 決まる ,恒温槽試験室内の空気の流速 試験室内温度10~40 [℃] 一定 あ ,また10 ~ 40[℃] の空気熱伝導率の変化 3 [mW/m/K]と小さいため,本実験を通してh
もほぼ一定と見せる.Fig.2-8に動作限界時における冷却部温度
T
Cを示す.封入率一定条件 ,T
amb 大く るほ
T
Cも大 く る傾向 見 る ほぼエラーバーの範囲T
C 一定 ある とわかる. よ ,一定の封入率条件下
Q
maxT
ambと比例関係にあ ,T
amb 大 くると
Q
max 小さく ると言える.動作限界における加熱部温度
T
Hをプロッ した図を Fig.2-9 に示す.Fig.2-9 よ ,一定の封 入率の条件下 ,動作限界時のT
HT
ambによ 誤差の範囲内 ほぼ一定 ある と わかる.最大熱輸送量
Q
max 周囲環境に依存して変化する ,動作限界時の加熱部温度および冷却 部温度 周囲環境によ 一定に る と 実験結果か わか た.OHP 動作していると 内部の作動流体 飽和状態と てお ,OHP の動作温度 作動流体の飽和温度と る.飽和 温度 加熱部と冷却部の間の温度と る ,本実験T
HとT
Cの温度差 小さい と,動作限界時の
T
HとT
Cの ち も封入率一定条件下T
ambに依存せ 一定 ある とか ,封入率 とに動作限界を迎える飽和温度 決ま ている と 示唆さ る.
た し,本研究 強制空冷の空気温度を変化させた実験しか行 てい いため,OHP の熱輸 送量の限界よ も強制空冷による排熱の限界に先に到達してしま ている可能性も考え ,よ
排熱量の大 い冷却条件 の実験による確認 必要 ある.
2.2.6 OHP内液体積と動作限界時の温度についての考察
本実験 OHPの作動流体として使用した HFC-134a ,室温以 高温に るにつ その液 密度 減少し,蒸気密度 増加する.Fig.2-10にHFC-134aの液密度と温度の相関を示す.図中
![Fig. 2-21 可視化実験結果 (FR = 39[wt%])](https://thumb-ap.123doks.com/thumbv2/123deta/6155029.103300/66.892.184.710.124.422/fig-fr-wt.webp)

![Table 3-5 熱輸送量の計算条件 Parameter [unit] Value](https://thumb-ap.123doks.com/thumbv2/123deta/6155029.103300/101.892.110.790.162.589/table-parameter-unit-value.webp)