Title
注湯・取鍋搬送の複合動作を伴う自走式自動注湯ロボット
における円筒形状取鍋の注湯および液面振動抑制制御( 本文
(Fulltext) )
Author(s)
野田, 善之; 矢野, 賢一; 寺嶋, 一彦
Citation
[日本ロボット学会誌 = Journal of Robotics Society of Japan]
vol.[24] no.[1] p.[94]-[103]
Issue Date
2006-01-15
Rights
The Robotics Society of Japan (日本ロボット学会)
Version
出版社版 (publisher version) postprint
URL
http://hdl.handle.net/20.500.12099/26970
94 日 本 ロ ボ ッ ト学 会 誌Vol.24 No.1, pp.94∼103, 2006
学術 ・技術 論 文
注 湯 ・取 鍋 搬 送 の複 合 動 作 を伴 う 自走 式 自動 注 湯 ロボ ッ ト
に お け る円筒 形状 取 鍋 の注 湯 お よび液 面 振 動 抑 制 制御
野
田
善
之*1矢
野
賢
一*2寺
嶋
一
彦*1
Pouring
and
Sloshing
Suppression
Control
of Cylindrical
Ladle
in Self-Transfer-Type
Automatic
Pouring
Robot
with
Complex
Motion
of Pouring
and
Transfer
Yoshiyuki Noda*1, Ken'ichi Yano*2 and Kazuhiko Terashima*1
This paper is concerned with development of self-transfer-type automatic pouring robot using a cylindrical ladle. Especially, the paper focuses on the pouring control of the cylindrical ladle and sloshing suppression during ladle transfer and tilting. In order to realize fast pouring, the robot's pouring system was constructed by a feed-forward controller with a system inverse to the pouring process. In order to suppress the sloshing of the liquid in the ladle, the natural frequency of the sloshing caused by the transferring and pouring motion was identified by short-term Fourier transform. The feedback controllers in the control system were then designed by the Hybrid Shape Approach using notch filters corresponding to the identified natural frequency of sloshing. The proposed pouring and sloshing suppression controls were applied to an automatic pouring robot that had both automatic detection of the mold's status filled or unfilled with liquid and tracking control to the mold. The effectiveness of the developed control system was shown through experiments.
Key Words: Automatic Pouring Robot, Pouring Control, Sloshing Suppression, Tracking Control
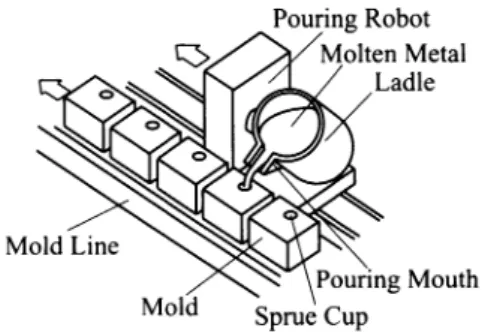
1.緒 言 鋳 造 産 業 に お け る注 湯 工 程 は 高 温 の 溶 湯 を 取 鍋 か ら 鋳 型 へ 注 ぐ こ と か ら,作 業 者 に と っ て 非 常 に 危 険 な 作 業 現 場 の 一 つ で あ り,現 在,自 動 注 湯 ロ ボ ッ トの 開 発 が 進 め ら れ て い る[1]図.そ の 中 で,自 動 化 され た注 湯 現 場 の 多 くは,固 定 され た 注 湯 ロ ボ ッ トの 前 で 鋳 型 が 順 次 停 止 し,取 鍋 を 傾 動 させ て,鋳 型 内 へ 溶 湯 を 注 湯 す る定 点 式 自動 注 湯 ロ ボ ッ トが 採 用 され て い る.し か し, こ の ロ ボ ッ トは 鋳 型 ラ イ ン の 停 止,搬 送 を 繰 り返 す た め,注 湯 後 の 鋳 型 内 溶 湯 に不 当 な 衝 撃 を与 え,製 品 品 質 を 低 下 させ る こ とが 懸 念 され て い る.ま た,こ の衝 撃 に よ っ て しば しば 砂 型 が 破 損 され る こ と も問 題 とな っ て い る[31.こ の 問 題 を 解 決 す る た め に,Fig.1に 示 す よ う な稼 動 し続 け る 鋳 型 ラ イ ン上 の 鋳 型 に 注 湯 ロ ボ ッ トが 同期 して 注 湯 す る 自走 式 自 動 注 湯 ロ ボ ッ トが 開 発 さ れ て い る[4].こ の 自 走 式 自 動 注 湯 ロ ボ ッ トは 鋳 型 が 搬 送 さ れ 続 け る こ とか ら,製 品 に 不 適 当 な衝 撃 を与 え ず,安 定 し た 製 品 品 質 を 提 供 で きる ロ ボ ッ トで あ り,最 新 設 備 を備 え た 注 湯 現 場 に お い て,採 用 さ れ つ つ あ る.し か し,こ の 注 湯 ロ ボ ッ トは
Fig. 1 Self-transfer-type automatic pouring robot
取 鍋 を搬 送 させ る こ と に よ り,取 鍋 内 の 溶 湯 が 液 面 振 動 を生 じ, こ の 液面 振 動 に よっ て,溶 湯 内 へ の ス ラ グ混 入 や 注 湯 中 に鋳 型 内 湯 口 へ 溶 湯 を 正 確 に注 湯 で き な い な どの 問 題 を 抱 え て い る.こ の 問 題 に 対 して,現 在,採 用 さ れ て い る 自 走 式 自動 注 湯 ロ ボ ッ トは ロ ボ ッ トの 搬 送 速 度 を 液 面 振 動 が 生 じ な い よ う に低 速 で搬 送 し て い る.こ の た め,注 湯 ロ ボ ッ トが 鋳 型 間 を 移 動 す る際 に 時 間 が か か り,生 産 性 が 損 な わ れ て し ま う こ とが 懸 念 され て い る.し た が っ て,液 面 振 動 を抑 制 し,高 速 搬 送 可 能 な 自走 式 自 動 注 湯 ロ ボ ッ トの 開 発 が 求 め られ て い る. 一 方 で,自 動 注 湯 ロ ボ ッ トの 多 くは,取 鍋 の 傾 動 角 速 度 と取 鍋 から流 出 す る 溶 湯 の 流 量 の 関 係 が 比 例 関 係 と な る 扇 形 取 鍋 が 用 いら れ て い る.し か し,従 来 の 作 業 者 が 手 動 で 取 鍋 を 傾 動 させ 原 稿 受 付2005年1月21日 *1豊 橋 技 術 科 学 大 学 工 学 部 *2岐 阜 大 学 工 学 部 *1Faculty of Engineering
, Toyohashi University of Technology *2Faculty of Engineering
, Gifu University
注 湯 ・取 鍋 搬 送 の 複 合動 作 を 伴 う 自走 式 自動 注 湯 ロ ボ ッ トに お け る 円 筒 形 状 取 鍋 の 注 湯 お よ び 液 面振 動 抑 制 制 御 95 て い る 注 湯 現 場 で は,形 状 が 簡 素 で メ ン テ ナ ン ス性 が 良 く,溶 湯 体 積 に対 して 表 面 積 が 小 さ い こ と か ら保 温 性 の 高 い 円 筒 形 状 取 鍋 が 多 く採 用 さ れ て い る.し た が っ て,自 動 注 湯 へ 移 行 す る 際 に は,円 筒 形 状 取 鍋 を そ の ま ま利 用 した い と い う要 望 が 強 く, 円 筒 形 状 取 鍋 に 対 す る 注 湯 制 御 の 開 発 が 求 め ら れ て い る. 自動 注 湯 ロボ ッ トに 関 す る研 究 は,数 多 く提 案 され て い る.特 に,注 湯 シ ス テ ム に対 す る制 御 と して,鋼 板 製 造 を 目的 と し た連 続 鋳 造 に対 す る 液 面 レベ ル 制 御 が 数 多 くあ る[5]∼[7].ま た,生 型 砂 を 用 い た 鋳 物 製 品 製 造 を 目 的 と した バ ッチ タ イ プ の 自動 注 湯 に つ い て も様 々 な シス テ ム が 提 案 さ れ て い る[8]∼[12].本 稿 で 扱 うプ ロセ ス は,手 動 注 湯 か ら少 な い 設 備 投 資 で 自動 化 が 可 能 で あ り,多 品 種 生 産 向 きの バ ッチ タ イ プ の 傾 動 式 自動 注 湯 国 で あ る.傾 動 式 自 動 注 湯 に お い て は,液 面 振 動 抑 制 制 御[13][14], 注 湯 量 制 御[15][16]や 液 面 レ ベ ル 制 御[17],こ れ ら を統 合 した スー パ ー バ イザ リ制 御[2]を 用 い た注 湯 制 御 な ど が あ る.こ れ ら は 扇 形 取 鍋 を対 象 と した 研 究 で あ る.こ れ に対 し て,筆 者 ら は 鋳 型 内 湯 口 の 液 面 レベ ル モ デ ル を 非 線 形 モ デ ル,円 筒 形 状 取 鍋 の 流 量 モ デ ル をLPV(Linear Parameter Varying)モ デ ル で 表 現 し,注 湯 制 御 す る こ と を提 案 して い る[18]。 こ こ で 用 い て い る 制 御 手 法 は,鋳 型 内 湯 口 液 面 レベ ル モ デ ル の 順 モ デ ル を 用 い て,目 標 液 面 レベ ル に 一 致 す る よ う に 試 行 錯 誤 に よ り流 量 パ ター ン を 求 め,そ れ か ら得 ら れ た 流 量 パ タ ー ン を リ フ ァ レ ン ス と して,流 量LPVモ デ ル に学 習 制 御 の 一 つ で あ るBetterment Processを 用 い て,取 鍋 の 傾 動 角 速 度,そ して,モ ー タの 逆 シ ス テ ム を 用 い て,モ ー タへ の 入 力 電 圧 を 導 出 して い る.し か し, 実 際 の 鋳 型 ラ イ ンで は,様 々 な 鋳 物 形 状 が 存 在 す る た め,そ の 都 度,上 述 の 手 法 で モ ー タへ の 制 御 入 力 を 求 め な け れ ば な ら な い.し た が っ て,与 え られ た 目標 液 面 レベ ル に 対 して ,よ り容 易 に,そ し て,短 時 間 で モ ー タへ の 入 力 電 圧 を 取 得 す る 手 法 が 必 要 と な る. ま た,筆 者 らは 自 走 式 自動 注 湯 ロ ボ ッ ト開 発 の 基 礎 と な る 移 動 物 体 へ の 液 面 振 動 抑 制 を考 慮 した 追 従 シ ス テ ム を 開 発 して い る[4].こ の シ ス テ ム は 移 動 物 体 の 位 置 情 報 を リ フ ァ レ ンス とす る 時 変 ゲ イ ン フ ィル タ を もつ2自 由度 制 御 シ ス テ ム で 構 成 さ れ る.さ ら に,鋳 型 の位 置 ず れ が 生 じ る場 合 を 考 慮 して,注 湯 ロ ボ ッ トに レー ザ セ ン サ を設 置 し,湯 口 位 置 を 自動 検 出 して 追 従 す る 制 御 シ ス テ ム を 構 築 して い る[20],し か し,上 述 の シ ス テ ム は 液 面 振 動 抑 制 を考 慮 した 追 従 制 御 に 特 化 し た 制 御 シ ス テ ム で あ り,注 湯 動 作 まで は 考 慮 さ れ て い な い.注 湯 動 作 を 含 む 液 体 容 器 の搬 送 は,液 体 形 状 が 取 鍋 傾 動 角 度 に よ っ て 変 化 す る た め,液 面 振 動 の 固 有 周 波 数 が 傾 動 角 度 と と も に 変 化 す る.し た が っ て,注 湯 動 作 を含 む 液 体 搬 送 に 対 して,液 面 振 動 抑 制 を 考 慮 した 追 従 シ ス テ ム を 構 築 す る必 要 が あ る. 上 述 の 自動 注 湯 ロボ ッ トに 関 す る従 来 研 究 か ら,自 走 式 自動 注 湯 ロ ボ ッ トを 開 発 す る う え で,次 の 制 御 技 術 が 必 要 と な る. ●(P1)Pouring Problem:円 筒 形 状 取 鍋 の 注 湯 制 御 を行 う際 に,様 々 な 鋳 物 形 状 に対 して,与 え ら れ た 目 標 液 面 レ ベ ル か ら 短 時 間 で モ ー タへ の 入 力 電 圧 を 求 め る手 法 . ●(P2)Sloshing Problem:自 走 式 自 動 注 湯 ロ ボ ッ トは 搬 送 中 に 注 湯 動 作 を 行 う た め,注 湯 動 作 を 含 む 液 体 搬 送 に 対 す る液 面 振 動 抑 制 制 御 シ ス テ ム の 構 築. こ れ らの 要 求 に対 して,本 研 究 で は次 の ア プ ロ ー チ を提 案 す る. ●(S1)Proposal Approachto(P1):円 筒 形 状 取 鍋 を 用 い た 注 湯 プ ロ セ ス に 対 して,そ の 逆 シ ス テ ム に よ り制 御 入 力 を 求 め る 手 法 を提 案 す る.本 手 法 で は 目 標 液 面 レベ ル に 対 して,次 の プ ロ セ ス の 逆 シ ス テ ム を 用 い る こ とで,モ ー タへ の 制 御 入 力 を取 得 す る. (S1-1)モ ー タモ デ ル (S1-2)取 鍋 流 量 モ デ ル (S1-3)鋳 型 内 湯 口 の 液 面 レベ ル モ デ ル こ れ に よ り,目 標 液 面 レベ ル か ら瞬 時 に モ ー タへ の 制 御 入 力 を 求 め る こ と が で き る,詳 細 は3章 に 示 す. ●(S2)Proposal Approachto(P2):注 湯 動 作 を 含 む 液 体 搬 送 に対 して,液 面 振 動 抑 制 を 考 慮 し た 追 従 シ ス テ ム を提 案 す る.本 手 法 で は,次 の 手 順 に よ り制 御 系 を 構 築 す る. (S2-1)注 湯 動 作 を 含 む 液 体 搬 送 か ら液 面 振 動 デ ー タ を取 得 し,そ の デ ー タ に 短 時 間 フ ー リエ 変 換 を施 す こ と で 液 面 振 動 の 時 変 固 有 周 波 数 を得 る. (S2-2)筆 者 らが 提 案 して い る 追 従 制 御 シ ス テ ム の フ ィー ド バ ッ クコ ン トロ ー ラ にHybrid整 形 法[4]を 適 用 して ,変 動 固 有 周 波 数 帯 の エ ネ ル ギ ー を減 衰 させ る 複 数 の ノ ッ チ フ ィ ル タ を も つ コ ン トロ ー ラ を設 計 す る. (S2-1),(S2-2)の 詳 細 は,4章 で 示 す. (S1),(S2)で 提 案 して い る注 湯 制 御 シ ス テ ム と追 従 制 御 シ ス テ ム を統 合 して ,円 筒 形 状 取 鍋 に 対 す る 液 面 振 動 抑 制 を 考 慮 した 自 走 式 自動 注 湯 ロ ボ ッ トを開 発 す る.そ して,実 験 を 通 じ て,開 発 した 自 走 式 自動 注 湯 ロ ボ ッ トの 有 用性 を確 認 す る. 2.自 動 注 湯 ロ ボ ッ トの 概 要 本 研 究 で 用 い る 自動 注 湯 ロ ボ ッ トをFig.2に 示 し,概 要 図 を Fig.3に 示 す.こ の 自動 注 湯 ロ ボ ッ トは 当 研 究 室 で 開 発 さ れ た 実 験 室 用 自動 注 湯 ロ ボ ッ トで あ る. 鋳 型 ラ イ ン上 に 容 量1.19×10-3[m3]の 鋳 型 を 三 つ 設 置 す る.取 鍋 は 半 径0.12[m],高 さ0.30[m]の 円 筒 形 状 取 鍋 を使 用 す る.そ し て,取 鍋 内 の 液 体 は 水 を用 い る.293[K]の 水 と 1,673[K]の 溶 湯 の 動 粘 性 係 数 は,そ れ ぞ れ1.004×10-6[m2/s] と0.970×10-6[m2/S]で あ り,水 の 挙 動 は 溶 湯 の 挙 動 とほ ぼ 同 等 で あ る こ と か ら,本 研 究 で は 水 を 用 い る こ と と した[19].取
Fig. 2 Self-transfer-type automatic pouring robot
96 野 田 善 之 矢 野 賢 一 寺 嶋 一 彦
Fig. 3 Illustration of automatic pouring robot
鍋 が 設 置 さ れ た 注 湯 ロ ボ ッ トは,ACサ ー ボ モ ー タ に よ り ボ ー ル ネ ジ を 介 して,三 次 元 空 間 内 を 移 動 す る.鋳 型 ラ イ ンは,AC サ ー ボ モ ー タ とボ ー ル ネ ジ に よ り1軸 方 向 の み 移 動 可 能 で あ る. ま た,ACサ ー ボ モ ー タ直 動 に よ り取 鍋 を 傾 動 させ る.モ ー タ の搬 送,傾 動 軸 はFig.3に 示 す よ う にRx,RY,Rz,R(-),M 軸 で あ る.ま た,取 鍋 の 三 次 元 空 間 内 の 位 置 と取 鍋 傾 動 角 度 は モ ー タ に取 り付 け られ た エ ン コ ー ダ に よ り計 測 され る. こ こ で,各 軸 の モ ー タへ 印 加 され る 入 力 電 圧 か ら注 湯 ロ ボ ッ トの 各 軸 の 位 置,取 鍋 の 傾 動 角 度,鋳 型 ラ イ ン の 位 置 ま で の 伝 達 関 数 を 式(1)に 示 す. 〓(1) y(t)は 注 湯 ロ ボ ッ トの 各 軸 の位 置,傾 動 角 度,鋳 型 ラ イ ン位 置 を 示 し,u(t)は モ ー タ へ 加 え ら れ る 入 力 電 圧 を 示 す.そ して, Km,は ゲ イ ン定 数,Tmは 時 定 数 を示 す.各 軸 の そ れ ぞ れ の パ ラ メ ー タ をTable1に 示 す.各 軸 モ ー タの パ ラ メ ー タは,ス テ ッ プ 応 答 に よ る過 渡 応 答 法 を用 い て 同 定 した.ま た,液 体 の 有 無 に よ る モ ー タ時 定 数 の 変 動 は,Rx軸 が0.5×10-3[s],Ry軸 が 0.1×10-3[s],Rz軸 が1.0×10-3[s],Re軸 が0.4×10-3[s] と時 定 数 に 対 し て わ ず か で あ る か ら,本 稿 で 用 い る 注 湯 ロ ボ ッ トの モ ー タ 時 定 数 は,負 荷 変 動 に か か わ らず 一 定 値 と して い る. ま た,Table1で は 各 軸 モ ー タ の 速 度,加 速 度 制 約 に つ い て も 示 す. 取 鍋 内 の 液 面 振 動 を計 測 す る た め に,取 鍋 内 に2本 の ス テ ン レ ス棒 が 設 置 され,そ の 抵 抗 値 よ り液 位 を計 測 す る.さ ら に,湯 口 内 の 液 面 レベ ル を計 測 す る た め に 自動 注 湯 ロ ボ ッ トに レ ー ザ 変 位 セ ンサ をFig.3の よ う に 取 り付 け る.な お,液 面 レベ ル を 正 確 に計 測 す る た め に,湯 ロ カ ッ プ に は 副 湯 口 が 設 け られ,そ の 中 に 浮 か せ た フ ロ ー トの 高 さ を検 出 す る こ と に よ り,液 面 レ ベ ル を 計 測 す る.こ の レー ザ セ ン サ は未 充 填 鋳 型 の 湯 口 位 置 検 出 に も用 い ら れ る.こ こ で,レ ー ザ セ ンサ に よ る 湯 口 検 出 手 法 に つ い て記 述 す る.レ ー ザ セ ンサ と充 填,未 充 填 鋳 型 の 位 置 関 係 をFig.4に 示 す. 注 湯 ロボ ッ トが 鋳 型 上 を通 過 す る 際 に,レ ー ザ セ ンサ は 鋳 型 内 の 副 湯 口上 を通 過 す る.レ ーザ セ ン サ が 副 湯 口 中心 に あ る と き, 湯 口 中心 と注 湯 ロ ボ ッ ト中心(取 鍋 中 心)が 搬 送 軸 上 で 同期 す る. も し,レ ー ザ セ ンサ が副 湯 口 中心 にあ る に もか か わ らず,湯 口 中
Table 1 Motor parameters
Fig. 4 Relation between molds and laser sensor
Fig. 5 Experimental result of laser sensor detecting molds
心 と注 湯 ロ ボ ッ ト中 心 が 同位 置 に ない と きは,湯 口 中 心 と注 湯 ロ ボ ッ ト中 心 の オ フセ ッ ト距 離 を考 慮 す る 必 要 が あ る.ま た,レ ー ザ セ ンサ に よ り,未 充 填 鋳 型 の 副 湯 口 を検 出 す る た め に,レ ー ザ セ ン サ の 搬 送 直 線 上 に副 湯 口底 面 と同 じ高 さ の もの は 存 在 し な い とす る.こ こ で,実 際 に鋳 型 上 を レー ザ セ ンサ が 通 過 した 際 の 実 験 結 果 をFig.5に 示 す.初 期 状 態 に お い て,Fig.4に 示 す よ う に注 湯 ロ ボ ッ ト中 心 位 置 を0.0[m]と し,充 填 鋳 型 を0.2[m], 未 充 填 鋳 型 を0.5[m]の 位 置 に設 置 す る.Fig.5に お い て,横 軸 は注 湯 ロ ボ ッ トをRx軸 上 で 搬 送 し た と き の 位 置 を示 し,縦 軸 は レー ザ セ ンサ に よ り検 出 さ れ た 距 離hLを 示 す.ま た,レ ー ザ セ ンサ に よ り検 出 さ れ た 距 離 は未 充 填 鋳 型 の 副 湯 口 底 面 に お い
注湯 ・取鍋搬送の複合動作 を伴 う自走式 自動 注湯 ロボ ッ トにおけ る円筒形状取鍋 の注湯お よび液面振動抑制制御 97 て,hL=0.0[m]と な る よ う に 補 正 され て い る.そ して,副 湯 口 よ り低 い 位 置hL≦-0.01[m]は,hL=-0.01[m]と して い る.Fig.5の 結 果 に お い て,注 湯 ロ ボ ッ トの 中心 位 置 が0.2[m] の と き,レ ー ザ セ ン サ に よ り検 出 さ れ た 距 離hL=0.02[m]を 示 して い る.そ して,注 湯 ロ ボ ッ トの 位 置 が0.5[m]で 検 出 され た距 離 はhL=0.0[m]を 示 して い る.し た が っ て,検 出 さ れ た 距 離hLに 閾 値hLth=0.005[m]>│hL│を 設 け る こ と で,未 充 填 鋳 型 を 検 出 す る こ とが で き る.こ こで,理 論 的 に は,閾 値 を hLth=0.0[m]≡│hL│と す る こ と で,未 充 填 鋳 型 を検 出 で きる が,測 定 誤 差 を 考 慮 して,閾 値 をhLth ,=0.005[m]>│hL│と して い る.Fig.5に お い て,閾 値hLthは 破 線 で 示 され て い る. こ れ に よ っ て,未 充 填 鋳 型 を 検 出 す る こ とが 可 能 とな る. 3.注 湯 制 御 シ ス テ ム 3.1注 湯 モ デ ル 注 湯 プ ロ セ ス の 概 略 図 をFig.6に 示 す.こ こ で,取 鍋 傾 動 モ ー タへ の 入 力 電 圧 か ら鋳 型 の 副 湯 口 の 液 面 レ ベ ル まで の 注 湯 モ デ ル を 三 つ の 部 位(1章 で 記 述 した(S1-1),(S1-2),(S1-3) の 順 モ デ ル を示 す)に 分 け る. ●(S1-1)モ ー タへ の 入 力電圧ut(t)か ら取 鍋 の 傾 動 角 速 度 ω(t)ま で の モ デ ル(モ ー タモ デ ル):Pθ(s) ●(S1-2)傾 動 角 速 度 ω(t)か ら取 鍋 か ら流 出 す る流 量q(t)ま で の モ デ ル(流 量 モ デ ル):Pf(5) ●(S1-3)取 鍋 か ら流 出 す る 液 体 の 流 量q(t)か ら鋳 型 内 湯 口 の 液 面 レベ ル ま で の モ デ ル(鋳 型 レベ ル モ デ ル):Ph(s) 上 述 の 三 つ の モ デ ル の 詳 細 を以 降 に 示 す. (S1-1):入 力 電 圧 か ら傾 動 角 速 度 ま で の モ ー タ モ デ ルPθ(s) は式(1)か ら積 分 器 を 除 い た も の を用 い る. (S1-2):流 量 モ デ ル に お い て,文 献[17]で はFig.7(a)に 示 す 扇 形 取 鍋 に対 す る モ デ ル が 示 さ れ て い る.扇 形 取 鍋 は 傾 動 角 度 に 対 して,液 体 表 面 積 が 一 定 で あ る こ とか ら,式(2)に 示 す 一 次 遅 れ 系 で 示 さ れ る. 〓 (2) こ こ で,Kf[m3/rad]は 流 量 モ デ ル の ゲ イ ン定 数 で あ り,Tf[s] は 時 定 数 で あ る.し か し,円 筒 形 状 取 鍋 は取 鍋 の 傾 動 角 度 に対 して,液 体 表 面 積 がFig.7(b)に 示 す よ う に 変 動 す る.し た が っ
Fig. 6 Illustration of a pouring model
て,円 筒 形 状 取 鍋 か らの 流 量 は,取 鍋 傾 動 角 度 に 依 存 す る と考 え,流 量 モ デ ル は 式(3)に 示 す 傾 動 角 度 に依 存 して,パ ラ メー タが 変 動 す るLPVモ デ ル と し て表 現 す る. 〓(3) こ こで,Kf(θ)[m3/rad]は 流 量 モ デ ル の 傾 動 角 度 に よ っ て 変 動 す る ゲ イ ン で あ り,Tf(θ)同 は 時 定 数 で あ る.θ は傾 動 角 度 で あ る.傾 動 角 度 に よ っ て 変 動 す る ゲ イ ン,時 定 数 を 同 定 す る た め に,取 鍋 の 各 傾 動 角 度 に お い て,ス テ ッ プ入 力 を 与 え て,3[deg] 傾 動 させ,そ の と きの 実 験 結 果 を1次 遅 れ 系 で フ ィッテ ィ ン グ さ せ る こ と で,各 傾 動 角 度 に対 す る ゲ イ ン定 数,時 定 数 を 求 め る. 同 定 され た ゲ イ ン定 数,時 定 数 をFig.8に 示 す.横 軸 は 傾 動 角 度 を 示 し,縦 軸 は ゲ イ ン定 数 と 時 定 数 を 示 す.ゲ イ ン定 数 の 結 果 に お い て,傾 動 角 度 が45[deg]に 達 す る ま で ゲ イ ンが 増 加 し て い る.こ れ は 傾 動 角 度 が45[deg]で あ るFig.7(b)(2)の 状 態 まで 表 面 積 が 増 加 し,流 量 が 増 加 す る こ とか ら,ゲ イ ン が 増 加 す る こ と を 示 して い る.そ して,45[deg]以 降 のFig.7(b)(3) の 状 態 で は 表 面 積 が 減 少 し,流 量 が 減 少 す る こ とか ら ゲ イ ンが 減 少 す る こ と を示 し て い る.し た が っ て,Fig.8に 示 す 傾 動 角 度 に対 す る パ ラ メ ー タ が 妥 当 で あ る こ とが 分 か る. (S1-3):鋳 型 内 湯 口 の 液 面 レベ ル モ デ ル はFig.6か ら ベ ル ヌ ー イの 定 理,連 続 の 式 を 考 慮 し て,式(4),(5)の よ う に得 られ る[18]. 〓(4)
(a)Fan-type ladle
(b)Cylindrical ladle
Fig. 7 Flow characteristics of two type ladles
Fig. 8 Gain and time constant for tilting angle
98 野 田 善 之 矢 野 賢 一 寺 嶋 一 彦 〓(5) cは 流 量 係 数,gは 重 力 加 速 度 で あ る.ま た,hs(t)が0[m]以 下 で あ る と き,hs=0と して い る.こ こ で,流 量 係 数cは 式 (6)と す る. 〓(6) hrefは 目標 液 面 保 持 高 さで あ り,ceは 目 標 液 面 保 持 高 さ に お け る 流 量 係 数 で あ る.こ れ は,注 湯 プ ロ セ ス に お い て 湯 口 の 液 面 レベ ル が 低 い 場 合 に は,湯 口 に投 入 され る 液 体 が 湯 口 底 面 に 衝 突 し,液 体 が 乱 れ る た め,湯 道 に 液 体 が 流 れ 込 み 難 くな る.一 方 で,湯 口 内 の 液 面 レベ ル が 上 昇 す る と 湯 口 内 の 液 体 の 乱 れ は 抑 え ら れ,湯 道 に 液 体 が 流 れ や す くな る.こ の 状 態 を表 現 す る た め に,流 量 係 数 を式(6)の よ うな 液 面 レベ ル に対 応 した 変 動 パ ラ メ ー タ と して い る.本 論 文 で は,流 量 係 数ceは 実 験 値 と フ ィッテ ィ ング す る こ とで 得 る こ とが で き,ce=0.59と な っ た. そ して,制 御 入 力ut(t)か ら 鋳 型 内 湯 口 の 液 位hc(t)ま で の モ デ ル は 式(1),(3)∼(5)よ り,式(7)の よ う に 得 られ る. P(s)=Pθ(s)Pf(s)Ph(s)(7) 3.2注 湯 フィ ー ドフォ ワ ー ド制 御 注 湯 プ ロ セ ス で 要 求 され る 制 御 仕 様 は,注 湯 動 作 を短 時 間 で 遂 行 す る こ と で あ る.し た が っ て,注 湯 して か ら素 早 く湯 口 内 の 液 面 を 高 い 位 置 まで 上 昇 させ,そ の 液 位 を保 持 す る こ とで あ る.こ の 要 求 を実 現 す る た め に注 湯 モ デ ル の 逆 シ ス テ ム を用 い た フ ィー ドフ ォ ワ ー ド制 御 を構 築 す る. (S1-3)鋳 型 モ デ ル の 逆 シ ス テ ム 導 出:理 想 的 な 液 面 レベ ル 曲線hcrefが 与 え られ る と式(5)よ りhsを 得 る こ とが で き る. こ こで,hsは 前 述 で も示 した よ う にhs>0で あ る.そ して, 得 られ たhsとhcrefを 式(8)に 代 入 す る こ と に よ り,取 鍋 か ら 鋳 型 へ 流 入 さ せ る理 想 流 量qrefを 得 ら れ る. 〓(8) (S1-2)取 鍋 の 傾 動 角 速 度 か ら流 出 流 量 ま で の 流 量 モ デ ル の 逆 シ ス テ ム 導 出:流 量 モ デ ル は 式(3)の1次 遅 れ 系 のLPVモ デ ル で あ る こ とか ら,逆 シ ス テ ム は 式(9)と な る. 〓(9) (S1-1)モ ー タ モ デ ル の 逆 シ ス テ ム 導 出:入 力 電 圧 か ら傾 動 角 速 度 ま で の モ ー タモ デ ル の 逆 シ ス テ ム は式(1)を 用 い て,式 (10)の よ う に 示 され る. 〓 (10) 式(8)∼(10)を 用 い る こ と で,理 想 液 面 レベ ル 曲線hcrefか ら入 力 電 圧utを 得 る こ と が で き る. こ こ で,逆 シ ス テ ム に与 え る理 想 液 面 レベ ル 曲線 は,式(8)∼ (10)か ら制 御 入 力 を得 る た め に,3回 微 分 可 能 な 関 数 で な け れ ば な ら な い.し た が っ て,理 想 液 面 レベ ル 曲 線 を 式(11)と す る. 〓
(11)
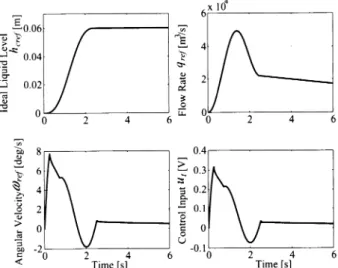
こ こ で,hrefは 式(6)に お い て も示 し て い る 湯 口 内 液 面 レベ ル の 目標 保 持 高 さで あ り,本 論 文 で は,href=0.06[m]と して い る.trは 取 鍋 が 傾 動 を 開始 して か ら 目標 保 持 液 面 高 さへ 到 達 す る ま で の 時 間 で あ り,tr=2.5同 と して い る.こ の 理 想 液 面 レベ ル 曲 線 を用 い て,取 鍋 の 初 期 傾 動 角 度 を38.8[deg]と し た と きの 液 面 レベ ル 曲 線hcref,理 想 流 量qref,傾 動 角 速 度 ωref, 入 力 電 圧utをFig.9に 示 す.こ こで,初 期 傾 動 角 度38.8[deg] は,取 鍋 が 直 立 した 状 態 で 液 位 を0.16[m]と し,そ の 後,取 鍋 を 傾 動 させ て,取 鍋 ノ ズ ル 先 端 に 液 位 が 達 し た と き の 傾 動 角 度 で あ り,こ の 角 度 か ら注 湯 を 開 始 す る. Fig.9に 示 した 初 期 傾 動 角 度38.8[deg]と し た と き に得 ら れ た 入 力 電 圧 を注 湯 ロ ボ ッ トへ 与 え た と き の 実 験 結 果 をFig.10(a) に 示 す.ま た,初 期 角 度 を変 更 した 場 合 の 検 証 と して,初 期 傾 動 角 度45.0[deg]と した と き に得 られ た 入 力 電 圧 を注 湯 ロ ボ ッ トへ 与 え た と きの 実 験 結 果 をFig.10(b)に 示 す.Fig.10に お い て, シ ミュ レ ー シ ョン結 果 で あ る理 想 液 面 レベ ル 曲線 を破 線 で 示 し, 実 験 結 果 を 実 線 で 示 す.実 験 結 果 の 液 面 レ ベ ル が0.036[m]か ら 出 力 し て い る の は,Fig.3に 示 す よ う に レ ー ザ セ ンサ で 液 面 レ ベ ル を計 測 す る た め の フ ロ ー ト位 置 が 湯 口 下 面 か ら0.036[m] 上 方 に あ る た め に,液 面 レベ ル が0.036[m]以 下 は0.036[m]をFig. 9 Simulation results obtained from inverse model
Fig. 10 Experimental results of pouring control
注湯 ・取鍋搬送の複合動作 を伴 う自走式 自動注湯 ロボ ッ トにおける円筒形状取鍋の注湯お よび液面振動抑 制制御 99 示 して い る.実 験 結 果 よ り,円 筒 形 状 取 鍋 を 用 い た注 湯 モ デ ル の 逆 シ ス テ ム か ら得 ら れ る 入 力 電 圧 を傾 動 モ ー タへ 与 え る こ と で,素 早 く 目標 保 持 液 面 レベ ル へ 到 達 し,保 持 し て い る こ と が 確 認 で き る.ま た,初 期 傾 動 角 度 を変 更 して も 同 様 の 結 果 が 得 られ る こ とか ら,式(3)∼(5)の 注 湯 モ デ ル が 妥 当 で あ る こ と が 確 認 で き る.そ して,注 湯 プ ロ セ ス の 順 シ ス テ ム を 用 い た従 来 手 法[18]で は モ ー タへ の 制 御 入 力 の 取 得 に か か る計 算 時 間 が, Pentium31.26GHzの コ ン ピ ュ ー タ を使 用 して1.75[s]で あ っ た が,本 手 法 で は0.05[s]と 短 時 間 で 取 得 で き る こ と が 確 認 さ れ た.従 来 手 法 は 順 モ デ ル にBetterment Processを 用 い て 制 御 入 力 を求 め る た め,繰 返 し計 算(本 稿 で は繰 返 し数60回)に 時 間 を 費 や す が,本 手 法 は 逆 モ デ ル に よ っ て 制 御 入 力 を 求 め る た め,繰 返 し計 算 を 必 要 と しな い こ とか ら短 時 間 計 算 が 可 能 と な る. 4.液 面 振 動 抑 制 を 考 慮 した 移 動 物 体 へ の 追 従 制 御 4.1制 御 系 の 概 要 液 面 振 動 抑 制 を考 慮 した 移 動 物 体 へ の 追 従 シ ス テ ム を構 築 す る た め に,:Fig.11に 示 す リ フ ァ レ ン ス生 成 器 を 含 む2自 由 度 制 御 系 を 構 成 す る.こ こ で,Target Systemは 鋳 型 ラ イ ン の 位 置 制 御 シ ス テ ム を示 し,Tracking Systemは 注 湯 ロ ボ ッ トのRx 軸 方 向 の位 置 制 御 シ ス テ ム を示 す.Per(8),Px(8)は 式(1)の モ ー タモ デ ル で あ り,Sx(8)は 注 湯 ロ ボ ッ トが 搬 送 され る こ と に よ っ て,励 振 され る取 鍋 内 液 体 の 液 面 振 動 を 示 す.KM(8), KX(8)はTarget System,Tracking systemの ブ イー ドバ ッ ク
コ ン トロー ラ を 示 す.ま た,Tracking Systemに は,追 従 性 能 の 向 上 を 目 的 に フ ィー ドフ ォワ ー ドコ ン トロ ー ラ に 注 湯 ロ ボ ッ ト の 逆 シ ス テ ムP-1X(s)を 適 用 す る.Target SystemとTracking Systemの 間 に あ るKVは,注 湯 ロ ボ ッ トが 移 動 物 体 へ 追 従 を 開 始 す る 際 にuvに 生 じる ス テ ッ プ状 の 信 号 か ら 直 接,フ ィ ー ドフ ォ ワ ー ドコ ン トロ ー ラ で 用 い て い る 逆 シ ス テ ム を 解 く こ と を避 け る た め に 設 け ら れ た ゲ イ ン が0か ら1へ と連 続 的 に 変 化 す る 時 変 ゲ イ ン フ ィル タ を示 す.rM,rXはTarget Systemと Tracking Systemの 位 置 リ フ ァ レ ンス で あ り,uM,uXは 鋳 型
ラ イ ン,注 湯 ロ ボ ッ トへ 印 加 さ れ る 入 力 電 圧 で あ る.yMは 鋳 型 ラ イ ンの 搬 送 距 離,yxは 注 湯 ロ ボ ッ トの 搬 送 距 離 で あ る.そ し て,yMiは 目 標 位 置 と な る 鋳 型 内 湯 口 位 置 で あ り,yMに 偏 差 eM2を 加 え 合 わ せ た も の で あ る.ま た,exはex=yx-yM で あ る. 本 シ ス テ ム の理 解 を 容 易 に す る た め に,Fig.11の パ ラ メ ー タ
Fig. 11 Block diagram of tracking control system
を注 湯 ロ ボ ッ トの 位 置 関 係 で 示 す とFig.12と な る.本 論 文 で は,eMi,そ れ に伴 いyMiが 未 知 情 報 で あ り,こ の 未 知 情 報 を レ ー ザ セ ン サ か ら得 られ た 距 離hLを も と に 未 充 填 鋳 型 の 湯 口 位 置 を 検 出 し,Fig.11に 示 す リ フ ァ レ ン ス 生 成 器RGを 用 い て,目 標 位 置 を生 成 し,追 従 す る 制 御 シ ス テ ム を構 築 す る. 4.2フ ィ ー ドバ ッ ク コ ン トロ ー ラKM(s),KX(s) Fig.11に お け る シ ス テ ム の フ ィー ドバ ッ ク コ ン トロ ー ラ Knr(8),Kx(s)は,取 鍋 内 の 液 面 振 動 抑 制 を 目 的 に ハ イ ブ リ ッ ド整 形 法 を用 い て 設 計 す る.ハ イ ブ リ ッ ド整 形 法 の 設 計 手 順 に つ い て は,文 献[4]を 参 照 さ れ た い . 本 稿 で 用 い る フ ィ ー ドバ ッ ク コ ン トロ ー ラ の 設 計 手 法 を次 に 示 す.文 頭 の 記 号(S2-1),(S2-2)は1章 の ア プ ロ ー チ 概 要 と の 対 応 を 明 確 に す る た め 示 して い る. (S2-1)液 面 振 動 固 有 周 波 数 の 推 定:コ ン トロ ー ラ を 設 計 す る 際 に,振 動 要 素 が も つ 固 有 周 波 数 を 同 定 す る必 要 が あ る.直 立 円 筒 形 状 容 器 に対 す る 液 面 振 動 固 有 周 波 数 の 同 定 に は,理 論 的 に 求 め る 手 法 が提 案 され て い る[4].し か し,取 鍋 傾 動 動 作 を 含 む取 鍋 内 液 体 の 液 面 振 動 固 有 周 波 数 は,傾 動 角 度 に よ っ て 液 体 形 状 が 変 化 す る た め一 定 値 と は な ら な い.そ こで,本 論 文 で は 取 鍋 傾 動 動 作 中 の 液 面 振 動 を式(12)に 示 す 短 時 間 フ ー リエ 変 換 を行 う こ とで,注 湯 中 に 変 動 す る 液 面 振 動 固 有 周 波 数 の 同 定 を行 う. 〓(12) こ こ で,hs(t)は 液 面 振 動 デ ー タ で あ り,w(t)は 窓 関 数 で あ る. 本 論 文 で は サ ンプ リ ン グ周 期0.01[s],窓 幅256点,大 き さ1の パ ル ス 信 号 を 窓 関 数 と した .窓 幅 を広 くす る と 時 間 に 対 す る 固 有 周 波 数 変 動 が 緩 慢 に な る.ま た,デ ー タ 点 数 が 少 な い と周 波 数 分 解 能 が 劣 化 す る.し た が っ て,固 有 周 波 数 変 動 が 緩 慢 に な ら な い 中 で 窓 幅 を広 くす る こ と を考 え,試 行 錯 誤 的 に 窓 幅256 点 と した. 液 面 振 動 デ ー タ は,注 湯 ロ ボ ッ トをFig.13(a),(b)に 示 す よ う に 搬 送 と取 鍋 傾 動 を行 う こ と で 取 得 す る.ま ず,Rx軸 方 向 へ 注 湯 ロ ボ ッ トを搬 送 す る こ と で,液 面 振 動 が 生 じ る.そ し て,取 鍋 をRθ 軸 方 向 へ 傾 動 させ る こ と で,液 面 振 動 固 有 周 波 数 が 変 動 す る.取 鍋 傾 動 は1回 の 注 湯 動 作 を行 う際 の 傾 動 軌 道 を 用 い る.取 鍋 が 直 立 状 態 で の 静 止 液 位 は0.16[m]と し,初 期 傾 動 角 度 の38.8[deg]ま で 傾 動 させ,そ の 後,3章 で 示 した 注 湯 プ ロ セ ス の 逆 シ ス テ ム に よ る 傾 動 パ ター ン を用 い る.こ の 動
Fig. 12 Positions of whole system
100 野 田 善 之 矢 野 賢 一 寺 嶋 一 彦
Fig. 13 Experimental results for sloshing analysis
Fig. 14 Energy contour of sloshing
Fig. 15 Peak frequency obtained from short time fourier form 作 に よ っ て 得 られ た 液 面 振 動 デ ー タ をFig.13(c)に 示 す.こ こ で,Fig.13(c)の 液 面 振 動 デ ー タ に お い て,6[s]以 降 の 液 面 レ ベ ル が 低 下 して い る こ とが 確 認 で き る.こ れ は 取 鍋 の 傾 動 と注 湯 に よ る 液 体 の 流 出 に よ っ て,液 面 レベ ル が 低 下 した こ と を 示 し て い る.こ の 液 面 レベ ル の 低 下 は 周 波 数 領 域 で 低 周 波 帯 域 の エ ネ ル ギ ー を 増 大 させ,液 面 振 動 の 固 有 周 波 数 の 同 定 を 困 難 に させ る.し た が っ て,式(13)を 用 い て,実 験 よ り得 られ た 液 面 振 動 デ ー タhSを 補 正 す る. 〓(13) こ こ で,t=κ △Tで あ り,△Tは サ ン プ リ ン グ周 期 を示 す.本 論 文 で は △Tニ0.01[s]で あ る.式(13)の 第2項 は 移 動 平 均 を 示 す.液 面 振 動 デ ー タ だ け を取 り 出 す た め に,N=50と し た.こ れ よ り得 られ た 液 面 振 動 デ ー タhsをFig.13(d)に 示 す. Fig.13(d)の 液 面 振 動 デ ー タheに 対 して,式(12)の 短 時 間 フ ー リエ 変 換 を 行 う.こ れ に よ っ て,得 られ た 結 果 をFig.14 の エ ネ ル ギ ー 等 高 線 図 で 示 す.こ こ で,取 鍋 傾 動 に 対 す る液 面 振 動 の 変 動 を確 認 す る た め,取 鍋 傾 動 中 の 液 面 振 動 デ ー タ(4∼ 22[s])に 対 して,短 時 間 フ ー リエ 変 換 を施 す.Fig.14に お い て,等 高 線 が 集 中 して い る 部 分 が 最 も エ ネ ル ギ ー が 高 い こ と を 示 して い る.し た が っ て,時 間 が4[s]で 周 波 数 が1.9[Hz]付 近 の エ ネ ル ギ ー が 最 も 高 い こ と を示 して い る. こ こ で,各 時 間 に お け る エ ネ ル ギ ー の ピ ー ク 周 波 数 を Fig.15(a)に 示 す.ま た,1回 目 の 注 湯 か ら続 け て,2回 目 の 注 湯 動 作 を行 った 際 の 液 面 振 動 デ ー タ(27∼45[s])に 短 時 間 フ ー リエ 変 換 を 施 して,こ の と き の エ ネ ル ギ ー の ピ ー ク周 波 数 をFig.15(b)に 示 す.Fig.15(a)に お い て,4[s]の と き の ピ ー ク 周 波 数 は1.93[Hz]を 示 し て い る.こ れ は,直 立 した 円 筒 形 状 容 器(直 径0.24[m],液 位0.16[m])の 理 論 的 に得 ら れ る 液 面 振 動 固 有 周 波 数 と一 致 して い る.し た が っ て,ピ ー ク周 波 数 が 液 面 振 動 固 有 周 波 数 を示 して い る こ とが 確 認 で き る.そ して, 1回 注 湯 か ら2回 注 湯 まで の 液 面 振 動 固 有 周 波 数 は,こ の 結 果 1.93[Hz]か ら1.61[Hz]ま で 変 動 し て い る.こ の 周 波 数 帯 域 で の エ ネ ル ギ ー を 低 減 させ る こ とで,2回 の注 湯 動 作 を伴 う液 体 搬 送 に よ っ て 生 じる 液 面 振 動 を抑 制 す る こ とが で き る.こ の 液 面 振 動 固 有 周 波 数 の 同定 結 果 を ハ イ ブ リ ッ ド整 形 法 に 反 映 させ る. (S2-2)コ ン トロ ー ラ の 設 計:ハ イ ブ リ ッ ド整 形 法 で は,最 初 に コ ン トロー ラ を定 式 化 す る.コ ン トロ ー ラKM(s),KX(s) は式(14)と な る. 〓(14) Kpは 比 例 ゲ イ ン で あ り,Tlは ロ ー パ ス フ ィ ル タ の 時 定 数 で あ る.ま た,ωnkは ノ ッチ フ ィ ル タの 阻 止 角 周 波 数 で あ る.液 面 振 動 固 有 周 波 数 は1.93[Hz](12.13[rad/s])か ら1.61[Hz】 (10.12[rad/s])ま で 変 動 す る こ とか ら,二 つ の ノ ッチ フ ィル タ (ωn1=12.13[rad/s],ωn2=10.12[rad/s])を 用 い て,液 面 振 動 固 有 周 波 数 帯 域 の エ ネ ル ギ ー を低 減 さ せ る.ζ は 減 衰 係 数 で あ り,ζ=0.0001と して い る.添 字M,XはTarget System, Tracking Systemの フ ィー ドバ ッ ク コ ン トロ ー ラ を 示 す.一 方, 比 例 ゲ イ ンKPと ロ ー パ ス フ ィル タ の 時 定 数Tiは 設 計 仕 様(装 置 制 約,振 動 抑 制 の た め の 周 波 数 制 約)を 満 た した 中 で 整 定 時 間 を 最 小 とす る 評 価 関 数 を用 い た 最 適 化 に よ り得 られ る.得 られ た 結 果 をTable2に 示 す.こ こ で,Tsは 鋳 型 ラ イ ンが0.8[m], 注 湯 ロ ボ ッ トが1.0[m]搬 送 され た と きの 整 定 時 間 を 示 す. 得 られ た コ ン トロ ー ラ の 周 波 数 特 性 をFig.16に 示 す.こ れ よ り,液 面 振 動 固 有 周 波 数12.17[rad/s]か ら10.12[rad/s]ま で の 帯 域 で コ ン トロ ー ラ ゲ イ ン が 減 衰 して い る こ とが 分 か る.ま た,比 例 ゲ イ ン と ロ ー パ ス フ ィ ル タ よ り低 周 波 数 帯 域 にお け る ゲ イ ンが 高 く,高 周 波 数 帯 域 に お け る ゲ イ ンは 低 く な っ て い る. この こ と か ら,固 有 周 波 数 が 変 動 す る 液 面 振 動 を 抑 制 し,短 時 間 で 目標 値 に到 達 す る こ とが 可 能 と な る. 4.3時 変 ゲ イ ン フ ィル タ 自 走 式 自 動 注 湯 ロ ボ ッ トに お い て,移 動 して い る最 中 の 鋳 型 へ 注 湯 ロ ボ ッ トが 停 止 した 状 態 か ら追 従 を 開 始 す る 場 合 が あ る.
注湯 ・取鍋搬送 の複 合動 作 を伴 う自走式 自動注湯 ロボ ッ トにおける円筒形状取鍋 の注 湯お よび液面振動抑制制御 101
Table 2 Parameters of obtained feedback controllers
Fig. 16 Gain diagram of FB controllers
そ の 例 と し て は,取 鍋 内 の 溶 湯 が 空 に な っ た場 合 に 給 湯 す る た め に 補 給 ポ イ ン トへ 注 湯 ロ ボ ッ トを 移 動 させ て,取 鍋 内 へ 溶 湯 を給 湯 し,給 湯 終 了 後 に 再 び 注 湯 ロ ボ ッ トが 未 充 填 鋳 型 へ 追 従 す る プ ロ セ ス が そ の 一 つ で あ る.こ れ は,Fig.11の 追 従 シ ス テ ム に お い て,Target SystemとTracking Systemの 間 に ス イ ッ チ ン グ 回 路 を 設 け る こ と で 実 現 で き る.し か し,こ の ス イ ッチ ン グ に よ っ て,uvに ス テ ップ 状 の信 号 が 生 じ,こ れ が フ ィー ド フ ォ ワ ー ドコ ン トロ ー ラ を 通 じて,過 大 な イ ンパ ル ス信 号 と な り,振 動 要 素 を 励 振 す る こ と と な る.こ れ を 回避 す る た め に,0 か ら1へ と連 続 的 に 変 化 す る 時 変 ゲ イ ン フ ィル タ を 用 い る.設 計 手 順 に つ い て は,フ ィー ドバ ッ ク コ ン トロ ー ラ 同様,文 献[4] を参 照 され た い.本 論 文 で は,得 ら れ た 時 変 ゲ イ ン フ ィ ル タの み を 示 す. 時 変 ゲ イ ン フ ィル タは 式(15)に 示 す 時 間 多 項 式 を用 い る. 〓(15) こ こ で,tpは 注 湯 ロ ボ ッ トが 追 従 を 開 始 した 時 点 を0と した 時 間 軸 で あ る.そ して,Tは 追 従 開 始(Kv=0)か らFig.12に 示 す 鋳 型 ラ イ ンの 基 準111に 到 達(Kv=1)し た 時 間 を示 す. した が っ て,Tを 小 さ くす る こ と で,注 湯 ロ ボ ッ トが 鋳 型 ラ イ ン の 基 準 位 置 へ 短 時 間 で 到 達 で き る.こ の こ とか ら,設 計 仕 様 (装 置 制 約,振 動 抑 制)を 満 た した 中 で,Tを 最 小 とす る評 価 関 数 を用 い て最 適 化 を行 う.こ の 結 果,T=2.84が 得 られ た. 4.4リ フ ァ レ ン ス 生 成 器 の 設 計 目標 位 置 で あ る 未 充 填 鋳 型 の 湯 口 の 自 動 位 置 検 出 を行 い,検 出 し た湯口 へ 追 従 す る リ フ ァ レ ン ス を 生 成 す る た め に,Fig.11 に 示 す リ フ ァ レ ン ス 生 成 器RGを 構 築 す る.リ フ ァ レ ン ス 生 成 器RGは レ ー ザ セ ンサ か ら得 られ た 距 離hL,そ し て,注 湯 ロ ボ ッ ト中心ORの 位 置yxと 鋳 型 ラ イ ン 基 準OMの 位 置yMと の 位 置 偏 差eXを 用 い て,目 標 位 置 で あ る 未 充 填 鋳 型 内 湯 口 中 心 位 置yMiを 算 出 し,リ フ ァ レ ン スrxを 出 力 す る.リ フ ァ レ ンス 生 成 器 の 詳 細 につ い て は,文 献[20]を 参 照 され た い.こ こ で,概 略 と して,リ フ ァ レ ン ス 生 成 器 で 行 わ れ る 三 つ の プ ロセ ス を示 す.
Fig. 17 Detection and tracking process of reference generator
ス テ ッ プ1:目 標 位 置 が検 出 さ れ る ま で のリ フ ア レ ン ス生 成 目標 位 置 で あ る 鋳 型 の 湯 口位 置 を探 索 す る た め に,リ フ ァ レ ン ス生 成 器 は 等 速 リ フ ァ レ ン ス を 出 力 す る.等 速 リ フ ァ レ ン ス は 注 湯 ロ ボ ッ トが 鋳 型 の 湯 口 を 通 過 す る ま で 与 え ら れ る. ス テ ッ プ2:目 標 位 置 の 検 出方 法 注 湯 ロ ボ ッ トに 設 置 さ れ て い る レ ー ザ セ ンサ が 未 充 填 鋳 型 の 湯 口 を通 過 す る 際 に,鋳 型 ラ イ ンの 基 準111か ら未 充 填 鋳 型 の 湯 口 ま で の 偏 差eMiを 式(16)を 用 い て計 算 す る. 〓(16) こ こ で,exはFig.12に 示 す 注 湯 ロ ボ ッ ト中 心ORか ら 鋳 型 ラ イ ン基 準 点OMま で の 位 置 偏 差 で あ る.hLはFig.4に 示 す レー ザ セ ン サ か ら得 ら れ た 距 離 で あ り,hLthはFig.5に 示 す 未 充 填 鋳 型 内 湯 口 の 底 面 を 抽 出 す る た め の 閾 値 で あ る.ま た, min(ex)は レ ー ザ セ ンサ か ら検 出 され た 距 離 が 閾 値 内 に あ る と きの 鋳 型 ラ イ ンの 基 準OMと 注 湯 ロ ボ ッ ト中 心ORと の 最 小 偏 差 で あ る.こ れ は,レ ー ザ セ ンサ が 未 充 填 鋳 型 内 湯 口 に最 初 に 入 っ た と きのexを 示 す.max(ex)は レー ザ セ ンサ か ら検 出 さ れ た 距 離 が 閾 値 内 に あ る と き の 鋳 型 ラ イ ンのOMと 注 湯 ロ ボ ッ ト中 心ORと の 最 大 偏 差 で あ り,レ ー ザ セ ンサ が 未 充 填 鋳 型 内 湯 口 を 過 ぎる 直 前 のexを 示 す.し た が っ て,min(ex)と max(ex)の 平 均 を とる こ とで,鋳 型 ラ イ ン基 準 か ら未 充 填 鋳 型 内 湯 口 の 中 心 ま で の 距 離eMiを 得 る こ とが で き る. ス テ ッ プ3:追 従 す る た め の リ フ ァ レ ン ス 生 成 ス テ ップ1,ス テ ッ プ2の 後,す な わ ち,式(16)の 目標 位 置 検 出 が 行 わ れ た 後 に リ フ ァ レ ンス 生 成 器 は 式(17)の リ フ ァ レ ン ス を 出 力 す る.
rx=eMi(17)
こ れ に よ り,注 湯 ロ ボ ッ トが 目標 位 置 で あ る 未 充 填 鋳 型 内 湯 口 に 追 従 す る こ とが 可 能 とな る.こ こ で,鋳 型 ラ イ ン が 等 速 で 移 動 す る と き の リ フ ァ レ ン ス生 成 器 の プ ロ セ ス をFig.17に 示 す. 注 湯 ロ ボ ッ トの 位 置 を実 線 で 示 し,目 標 位 置 で あ る未 充 填 鋳 型 内 湯 口 の 中 心 を 破 線 で 示 す.そ して,閾 値 に よ っ て 検 出 され る 湯 口 底 面 を灰 色 で 示 す.こ れ よ り,湯 口 を通 過 す る ま で は ス テ ッ プ1で 与 え ら れ た リ フ ァ レ ンス に よ り 目標 位 置 が 探 索 さ れ る. そ して,湯 口 に 入 っ た 段 階 で,ス テ ッ プ2に よ っ て 目標 位 置 が 計 算 され る.湯 口 を通 過 後,ス テ ップ3で 目標 位 置 に 追 従 す る た め の リ フ ァ レ ン ス が 出 力 され る. 4.5実 験 結 果 提 案 した 注 湯 動 作 を含 む 液 体 搬 送 に 対 す る 液 面 振 動 抑 制 制 御 日本 ロ ボ ッ ト学 会 誌24巻1号 101 2006年1月102 野 田 善 之 矢 野 賢 一 寺 嶋 一 彦
Fig. 18 Experimental results of automatic pouring robot
の 検 証 と して,Fig.3に 示 す 自 走 式 自動 注 湯 ロ ボ ッ トを用 い て, 未 充 填 鋳 型 へ の 追 従 制 御 実 験 を行 う.本 研 究 で 用 い る 実 験 室 用 鋳 型 ラ イ ンは,搬 送 距 離 が0.8[m]と 限 界 が あ る こ と か ら,鋳 型 ラ イ ン を正 弦 波 状(振 幅0.35[m],周 波 数0.23[Hz])に 搬 送 さ せ る.Fig.3に 示 す 鋳 型 ラ イ ン上 に は3体 の 鋳 型 を搭 載 し,右 側 の 鋳 型 は 液 体 が 充 填 さ れ て お り,中 央 と左 側 の鋳 型 は 未 充 填 で あ る.そ れ ぞ れ が0.24[m]間 隔 で 配 置 さ れ て い る.そ して, 鋳 型 ラ イ ンが 搬 送 を 開 始 して か ら4.5[s]後 に注 湯 ロ ボ ッ トが 追 従 を 開 始 す る.ま た,本 実 験 の 注 湯 動 作 は,3章 で 示 し た 逆 シ ス テ ム に よ る 注 湯 フ ィ ー ドフ ォ ワ ー ド制 御 を 用 い て,未 充 填 鋳 型 に対 し て,2回 注 湯 を行 う. 上 述 の 実 験 条 件 に よ って 得 られ た 実 験 結 果 をFig.18に 示 す. Fig.18(a)は 鋳 型 と注 湯 ロ ボ ッ トの 位 置 を 示 す.破 線 は 未 充 填 鋳 型 の 湯 口 中 心 を示 し,一 点 鎖 線 は 充 填 鋳 型 の 湯 口 中 心 を示 す. そ して,実 線 は注 湯 ロ ボ ッ トの 中 心 位 置(取 鍋 ノズ ル 中 心 位 置) を 示 す.Fig.18(b)は 注 湯 ロ ボ ッ トに取 り付 け られ て い る レ ー ザ セ ンサ か ら検 出 され た距 離hLを 示 す.こ の 距 離 は 湯 口 底 面 を 0[m]と し て い る.ま た,破 線 部 で 示 す 注 湯 ロボ ッ トが 充 填 鋳 型 と未 充 填 鋳 型 を 通 過 し た 際(5.8∼6.8[s])の レ ー ザ セ ンサ か ら 検 出 さ れ た 距 離 を 拡 大 図 で 示 す.Fig.18(c)は 注 湯 ロ ボ ッ トの R記 軸 モ ー タへ 印 加 され る 入 力 電 圧 で あ る.そ して,Fig.18(d) は 取 鍋 の 傾 動 角 度 で あ る.Fig.18(a)よ り,注 湯 ロ ボ ッ トが 充 填 鋳 型 を通 過 して,未 充 填 鋳 型 へ 追 従 して い る こ とが 確 認 で き る.そ し て,Fig.18(b)の 拡 大 図 よ り,レ ー ザ セ ンサ か ら 検 出 され た 距 離 が 充 填 鋳 型 と未 充 填 鋳 型 で は 異 な り,未 充 填 鋳 型 で │0.005│[m]以 内 を 示 し て い る こ とか ら,未 充 填 鋳 型 の 湯 口 底 面 を 検 出 し て い る こ と が 確 認 で き る.ま た,注 湯 動 作 を 行 う こ と に よ り湯 口 に液 体 が 注 が れ る た め,1回 注 湯 時 の15∼20[s],2 回 注 当 時 の34∼39[s]の 間 で レー ザ セ ンサ の 計 測 高 さ が 変 動 し て い る.こ の よ う に 移 動 し て い る鋳 型 へ 追 従 し な が ら,注 湯 が
Fig. 19 Experimental results of sloshing in ladle
な さ れ て い る こ と が 確 認 で き る. こ の 実 験 か ら得 ら れ た 液 面 振 動 をFig.19に 示 す.こ こ で, 比 較 対 象 と し て,Fig.11に 示 す シ ス テ ム の フ ィー ドバ ッ ク コ ン トロ ー ラ を比 例 制 御 と し た場 合 の 実 験 結 果 も 同 時 に 示 す.こ の と きの 比 例 ゲ イ ン は 注 湯 ロ ボ ッ トが 移 動 鋳 型 へ 同 期 す る まで の 時 間 が 同 じ に な る よ う に 設 定 して い る.し た が っ て,比 例 ゲ イ ン は29.8と した.破 線 が 比 例 ゲ イ ン に よ る液 面 振 動 で あ り,実 線 が 提 案 した 制 御 系 で の 液 面 振 動 で あ る.ま た,Fig.19は 鋳 型 ラ イ ンが 搬 送 を 開 始 して か ら,1回 注 湯 が 終 了 す る20[s]ま で を 示 して い る.こ の 結 果 は2回 目 の 注 湯 に お い て も 同 様 の結 果 を 得 て い る.Fig.19に お い て,液 面 振 動 が 注 湯 ロ ボ ッ トの 追 従 開 始 時 間(4.5[s])以 降 に 生 じて い る.そ し て,比 例 制 御,提 案 制 御 系 の 両 方 と も に0.23[Hz]の 振 動 が 生 じて い る.こ れ は,鋳 型 ラ イ ンが 正 弦 波 状 に 搬 送 さ れ て い る た め,こ の と き の 加 減 速 に よ っ て 液 面 が 傾 い て い る こ と を示 して い る.ま た,液 面 レベ ル が 徐 々 に低 下 して い る こ とが 確 認 で きる.こ れ は,液 体 が 注 湯 動 作 に よ っ て 流 出 して い る こ と を 示 して い る.し か し,比 例 制 御 にお い て は,1.9[Hz]付 近 の 液 面 残 留 振 動 が 生 じて い る.こ の 液 面 振 動 に よ っ て,注 湯 流 線 が 乱 れ,正 確 に 湯 口 へ 注 湯 で き な く な る こ と が 確 認 さ れ た.一 方 で,提 案 し た 制 御 系 は1.9[Hz1 付 近 の 液 面 残 留 振 動 を抑 制 で き て い る た め,安 定 した 注 湯 流 線 を得 る こ とが 確 認 され た. 5.結 言 本 論 文 は 円 筒 形 状 取 鍋 に対 す る 逆 シ ス テ ム を用 い た 注 湯 制 御 と未 充 填 鋳 型 の 自動 位 置 検 出,液 面 振 動 抑 制 を考 慮 し た 自 走 式 自動 注 湯 ロ ボ ッ トを 構 築 した.円 筒 形 状 取 鍋 の 流 量 モ デ ル に対 して,LPVモ デ ル を 用 い,鋳 型 モ デ ル か ら モ ー タモ デ ル まで の 逆 シ ス テ ム を導 出 す る こ と で,円 筒 形 状 取 鍋 の 高 速 注 湯 動 作 を 実 現 し た.そ して,注 湯 動 作 を含 む 液 体 搬 送 の 液 面 振 動 に 対 し て,短 時 間 フ ー リ エ 変 換 を用 い る こ とで 変 動 す る 液 面 振 動 固 有 周 波 数 を 同 定 し,こ の 周 波 数 帯 の エ ネ ル ギ ー を低 減 させ る こ と で,液 面 振 動 を 抑 制 で き る こ と を 示 した.本 制 御 シ ス テ ム に よ り,自 走 式 自動 注 湯 ロ ボ ッ トに 対 して 高 速 か つ 流 量 が 安 定 し た 注 湯 動 作 が 実 現 で き る こ と を 実 験 を通 し て示 した. こ れ ら の こ とか ら,提 案 した 注 湯,液 面 振 動 抑 制 制 御 シ ス テ ム を 自走 式 自動 注 湯 ロ ボ ッ トへ 適 用 す る こ と に よ り,製 品 品 質 向 上,生 産 性 向 上 が 期 待 で き る と思 わ れ る.
参
考
文
献
[1] 寺 嶋 一 彦:“ 鋳 造 業 に お け る 自 動 注 湯 ・溶 湯 搬 送 の 現 状 ”,素 形 材, vol.39,no.6, pp.1-8, 1998. [2] 矢 野 賢 一,金 子 元 樹,杉 本 祐,寺 嶋 一 彦:“ 注 湯 プ ロ セ ス に お け る 熟注湯 ・取鍋搬 送の複合動作 を伴 う自走式 自動 注湯ロボ ッ トにおけ る円筒形状取鍋 の注湯お よび液面振動抑制制御 103 練 技 能 を 実 現 す る 自 動 注 湯 ロ ボ ッ ト の ス ー パ ー バ イ ザ リ 制 御 ”,日 本 ロ ボ ッ ト学 会 誌,vol21,no.6,pp.670-681,2003. [3] 川 岸 博 伸,矢 野 賢 一,寺 嶋 一 彦,鈴 木 祐 二:”CFDシ ミュ レ ー シ ョ ン に よ る 移 動 鋳 型 内 凝 固 欠 陥 解 析 と 搬 送 制 御 ”,第144回日 本 鋳 造 工 学 会 全 国 大 会 講 演 概 要 集,p.56,2004, [4] 野 田 善 之,矢 野 賢 一,三 好 孝 典,寺 嶋 一彦:“ 移 動 物 体 へ の 液 面 振 動 抑 制 を 考 慮 し た 追 従 制 御 ”,計 測 自 動 制 御 学 会 論 文 集,vol.40.no.4, pp.424-433,2004.
[5] H. Kitada, O. Kondo, H. Kasachi and K. Sasame:•gH•‡Con-trol of Molten Steel Level in Continuous Caster,•hIEEE Trans. Systems Technology, vol.6, no.2, pp.200-207, 1998.
[6] M. Abarron, R. Aguilar, J. Gnozalez and E. Melendez:•gModel-based Control of Model Level in a Continuous Caster under Model Uncertainties,•hElsevier Science Ltd, pp.191-196, 1998.
[7] S.F. Graebe, G.C. Goodwin and G. Elsley:•gControl Design and Implementation in Continuous Steel Casting.•hIEEE Con-trol Systems, vol.15, no.4, pp.64-71, 1995.
[8] W. Lindsay:•gAutomatic Pouring and Metal Distribution Sys-tems,•hFoundry Trade Journal, Feb. 10, pp.151-176, 1983.
[9] R.C. Rodgers: "Automatic Pouring '88,•gFoundry management and technology, October, pp.36-38, 1988.
[10]T. Bex:•gMelting and Pouring,•hmodern casting, August. PP.27-34, 1992. [11] 藤 江 正 克:“ 自 動 注 湯 機 へ の マ イ コ ン の 利 用 ”,総 合 鋳 物,vol22,no.10, pp.7-11,1981. [12] 佐 藤二 朗,吉 田 健 逸:“ メ ル ポ ア シ ス テ ム 鋳 造 用 自 動 注 湯 装 置 ”,工 業 加熱,vol.29.no.4,PP.19-27,1992. [13] 勝 部 展 生,永 井 正 夫:“ 傾 動 式 自 動 注 湯 機 の 液 面 制 御 に 関 す る 研 究(第 1報 モ デ リ ン グ と 制 御)”,日 本 機 械 学 会 論 文 集(C編),vol.65, no.634, pp.2345-2351, 1999.
[14]K. Terashima and K. Yano:•gSloshing Analysis and Suppres-sion Control of Tilting-Type Automatic Pouring Machine,•h
IFAC Journal of Control Engineering Practice, vol.9, no.6, pp.607-620, 2001.
[15] 松 田 政 夫,頃 安 貞 利:“ 傾 動 軸 昇 降 装 置 を 有 す る 自 動 注 湯 機 か ら の 流 量 計 算 法”,鋳 造 工 学,vol.71.no.1,pp.3-a.1999.
[16]M. Kaneko, Y. Sugimoto, K. Yano and K. Terashima:•gSuper-visory Control of Pouring Process by Tilting-Type Automatic Pouring Robot,•hProceedings of the 2003 IEEE/RSJ Intl. Con-ference on Intelligent Robots and Systems Las Vegas, pp.3004-3009, 2003.
[17]Y. Sugimoto, K. Yano and K. Terashima:•gLiquid Level Con-trol of Automatic Pouring Robot by Two-Degrees-of-Freedom
Control,•hProceedings of IFAC 15th Triennial World Congress, 2002. [18] 矢 野 賢 一,杉 本 祐,野 田 善 之,寺 嶋 一 彦:“Betterment Processに よ る 円 筒 取 鍋 型 自 動 注 湯 ロ ボ ッ トの 注 湯 流 量 制 御 ”,日 本 機 械 学 会 論 文 集(C編),vol.70,no.694,pp.206-213,2004. [19] 矢 野 賢 一,川 岸 博 伸,寺 嶋 一 彦:“CFDに よ る ス ロ ッ シ ン グ 解 析 と 溶 湯 搬 送 制 御 シ ス テ ム 設 計”,日 本 機 械 学 会 論 文 集(C編),vol.68, no.671, pp.2001-2008, 2002.
[20] Y. Noda, K. Yano and K. Terashima:•gDetection and Track-ing Control to Unknown Moving Object Considering Sloshing-Suppression in Pouring Robot,•hProceedings of the 23rd IASTED International Conference MODELLING, IDENTIFI-CATION, AND CONTROL, pp.345-350, 2004.
野 田 善 之(Yoshiyuki Noda) 1972年8月6日生.2003年 豊 橋技 術 科学大 学 大学 院工 学 研究 科 修 士課 程修 了.同 年,豊 橋 技術 科 学 大 学 大 学 院11学 研 究 科博 十 課 程 に人 学,現 在 に至 る. 2005年6∼8月 メ ルボ ル ン大 学 客 員 研 究 員.鋳 造 産 業 にお け る注 湯工 程 の 自動 化,制 振 制 御,ト ラ ッ キ ング制御,お よび動 的 計 量の研 究 に従 事.計 測 自 動 制 御 学 会,日 本 鋳 造工 学 会,日 本 計 量 史 学 会 の 会 員. (日 本 ロ ボ ッ ト学 会 学 生 会 員) 寺 嶋 一 彦(Kazuhiko Terashima) 1952年6月24日 生.1981年 京 都 大 学 大 学 院 工 学 研 究 科 博 士 後 期 課 程 修 了.1982年 豊 橋 技 術 科 学 大 学 工 学 部 生 産 シ ス テ ム 工 学 系 助 手.講 師,助 教 授 を 経 て1994年 教 授,現 在 に 至 る.1991年9月 一 1992年9月 ド イ ツ ミュ ヘ ン 工 科 大 学 客 員 研 究 員. シ ス テ ム 制 御 理 論 と そ の 応 用 に 関 す る 研 究 に 従 事. 計 測 自動 制御 学 会,シ ス テム制 御 情 報学 会,日 本 機械 学 会,日 本 鋳 造 工 学 会,IEEE等 の 会員.(日 本 ロ ボ ッ ト学 会正 会 員) 矢 野 賢 一(Ken'ichi Yano) 1969年4月4日 生.1999年 豊橋技 術 科学 大学 大学 院工 学研 究 科博 士後 期 課程 修 了.同 年 豊橋 技術 科 学 大学 工 学 部生 産 シ ステ ム工 学 系助 手.2004年 岐 阜 大 学 工学 部機 械 システ ム工 学科 助教 授 とな り現在 に 至 る.2002年8月 ∼2003年8月 ベ ル リン工 科 大 学 客 員研 究 員.シ ステ ム制御 理 論 とそ の応 用 に関 す る 研 究 に 従 事.計 測 自 動 制 御 学 会,シ ス テ ム 制 御 情 報 学 会,日 本 機 械 学 会,日 本 鋳 造工 学 会,IEEE等 の 会 員.(日 本 ロ ボ ッ ト学 会 正 会 員) 日 本 ロ ボ ッ ト学 会 誌24巻1号 103 2006年1月