JAXA Research and Development Memorandum
多軸振動非接触自動計測システム(MaVES)の開発
神田 淳
宇宙航空研究開発機構研究開発資料
2010年9月
JAXA-RM-10-010宇宙航空研究開発機構研究開発資料
1. はじめに ... 1
2. システムの概要
... 3
2.1. システムの構成
... 3
2.2. 計測の仕組み
... 3
3. システムの詳細 ... 4
3.1. 3Dスキャニング振動計 ... 4
3.1.1. 振動計の構成 ... 4
3.1.2. 振動計の仕様 ... 5
3.1.3. 計測機能 ... 12
3.1.4. 光学系 ... 12
3.1.5. 振動速度検出性能 ... 13
3.1.6. PSVソフトウェアの機能 ... 13
3.2. センサー位置制御ロボット ... 14
3.2.1. ロボットの構成 ... 14
3.2.2. ロボットの仕様 ... 15
3.2.3. ロボットの座標系 ... 16
3.2.4. ロボットの機能 ... 16
3.3. 統合ソフトウェア ... 16
3.3.1. ソフトウェアの役割 ... 16
3.3.2. 統合ソフトウェアの機能 ... 16
3.3.3. 拡張機能 ... 17
3.4. モーダル解析ソフトウェア ... 17
3.4.1. ソフトウェアの構成 ... 17
3.4.2. モーダル解析ソフトウェアの機能 ... 17
3.5. その他 ... 17
3.5.1. 安全フェンス
... 17
3.5.2. Scanning Head取り付け治具
... 18
3.5.3. ロボット架台 ... 19
3.5.4. PCとネットワーク ... 19
4. 計測方法 ... 20
4.1. 計測の流れ ... 20
4.2. 計測準備 ... 21
4.2.1. 供試体と計測機器の設置 ... 21
4.3.1. PSVのPreference設定
... 21
4.3.2. 2Dアライメントの設定
... 21
4.3.3. 3Dアライメントの設定 ... 23
4.3.4. Base座標系のキャリブレーション ... 23
4.4. ロボット位置のティーチング ... 25
4.5. 計測点の設定 ... 26
4.6. 計測点の解析 ... 26
4.7. 計測条件の設定 ... 28
4.8. 自動計測の実行 ... 30
4.9. OverlayTraces機能による拡張表示 ... 30
4.10. 計測結果の処理 ... 30
5. 計測例 ... 31
5.1. 供試体 ... 31
5.2. 計測のセッティング ... 31
5.3. ロボット位置 ... 31
5.4. ジオメトリ ... 32
5.5. 計測条件 ... 33
5.6. 実稼働解析 ... 33
5.7. モード解析 ... 34
6.
特別教育 ... 357. おわりに ... 35
参考文献 ... 35
ᄙゲᝄേ㕖ធ⸅⥄േ⸘᷹ࠪࠬ࠹ࡓ㧔 MaVES 㧕ߩ㐿⊒
*↰ ᷕ
*1Development of Multi-axis Vibration Evaluating System (MaVES)
*Atsushi KANDA
*1Abstract
The MaVES (Multi-axis Vibration Evaluating System) is able to measure automatically three directional vibration characteristics of objects in non-contact and analyze modal characteristics and operating deflection shapes. This system consists of three laser Doppler sensors, a 6-axis robot and a control software. This paper shows system specification, functions, measurement procedures and an example.
Keywords: robot, laser, vibrometer, modal characteristics, ODS
ⷐ
ᄙゲᝄേ㕖ធ⸅⥄േ⸘᷹ࠪࠬ࠹ࡓMaVES (Multi-axis Vibration Evaluating System) ߪ,‛ߩ3ゲᣇะߩᝄേࠍ㕖ធ⸅
߆ߟ⥄േߢ⸘᷹ߒ, ࡕ࠳࡞⸃ᨆ߿ታⒿᝄേ⸃ᨆࠍⴕ߁ߎߣ߇ߢ߈ࠆࠪࠬ࠹ࡓߢࠆ. ࠪࠬ࠹ࡓߪ 3 บߩࠩ
࠼࠶ࡊᑼࡦࠨ, 6ゲࡠࡏ࠶࠻߅ࠃ߮ߎࠇࠄࠍࠦࡦ࠻ࡠ࡞ߔࠆ࠰ࡈ࠻࠙ࠚࠕ߆ࠄ᭴ᚑߐࠇࠆ. ᧄ⾗ᢱߢߪ, ᧄࠪ
ࠬ࠹ࡓߩ᭽, ᯏ⢻, ⸘᷹ᣇᴺ, ⸘᷹ߦߟߡ␜ߔ.
ߪߓߦ
ቝቮ⥶ⓨ⎇ⓥ㐿⊒ᯏ᭴ߢߪ,ᝄേ․ᕈࠍ㕖ធ⸅߆ߟ⥄
േߢ⸘᷹ߒ,⸃ᨆ߹ߢⴕ߁ߎߣ߇น⢻ߥࠪࠬ࠹ࡓߣߒߡ,
േ ⊛ ᄌ ⸘ ᷹ ࠪ ࠬ ࠹ ࡓ DDMS㧔Dynamic Displacement Measurement System㧕ࠍᢛߒߡߚ㧔Fig.1.1㧕. DDMS ߪ1990ᐕߦ㐿⊒ߐࠇߚࠪࠬ࠹ࡓ1)ߢ, 6ゲࡠࡏ࠶࠻ߣߎ ࠇߦタߒߚࠩࡦࠨ1 บ, ߐࠄߦࡠࡏ࠶࠻ߩ
േߣหᦼࠍขࠅߥ߇ࠄᝄേ⸘᷹ࠍⴕ߁ᓮࠦࡦࡇࡘ
࠲߅ࠃ߮࠰ࡈ࠻࠙ࠚࠕ߆ࠄ᭴ᚑߐࠇߡߚ. 㕖ធ⸅ᑼߩ
Fig.1.1 േ⊛ᄌ⸘᷹ࠪࠬ࠹ࡓ㧔DDMS㧕
ࠩࡦࠨࠍ↪ࠆߎߣߢ᷹ቯኻ⽎ߩଏ⹜ߩᝄ
േ․ᕈߦᓇ㗀ࠍਈ߃ߥߎߣ, ฦ⸘᷹ὐߦኻߔࠆࡦࠨ
ߩ⟎ࠍࡠࡏ࠶࠻ߦ੍࠹ࠖ࠴ࡦࠣ㧔ᢎ␜㧕ߐߖߡ ߅ߊߎߣߢ, ⥄േߢଏ⹜ోߩ㕙ᄖᝄേࠍ⸘᷹ߢ߈ࠆ ߎ ߣ ߇ ᄢ ߈ ߥ ․ ᓽ ߢ ߞ ߚ. ߎ ߩ ࠪ ࠬ ࠹ ࡓ ࠍ ↪ ߡ
HOPE-X ోᯏേ․ᕈ⹜㛎ᮨဳ, SST ࡠࠤ࠶࠻ታ㛎ᯏోᯏ
ᮨဳ⠢ᮨဳ, SST ᛂߜߍࡠࠤ࠶࠻ࡈࠖࡦᮨဳ, H-IIA
ഥࠛࡦࠫࡦ࠻ࠬᮨဳߣߞߚ㘑ᵢ⹜㛎↪ߩฦ⒳ଏ⹜
߆ࠄ, FA-2002)߿ALFLEX3)╬ߩታᯏߦ⥋ࠆ߹ߢᄙᢙ ߩᝄേ․ᕈߩ㜞♖ᐲ⸘᷹ࠍല₸⊛ߦⴕߞߡ߈ߚ.
Fig.1.2 ᄙゲᝄേ㕖ធ⸅⥄േ⸘᷹ࠪࠬ࠹ࡓ㧔MaVES㧕
Fig.2 MaVESߩ᭴ᚑ
ߎߩ㑆,1999 ᐕߦࡠࡏ࠶࠻ᓮ↪ࠦࡦࡇࡘ࠲ߩᦝᣂ
4), ߅ࠃ߮ 2002ᐕߦࡠࡏ࠶࠻ᓮᯏ⢻ߩᡷ⦟ 5)ࠍⴕ߁ߥ ߤ, ⠧ൻኻ╷߿ᯏ⢻ะࠍⴕߞߡ߈ߚ. ߒ߆ߒࡠࡏ࠶
࠻߅ࠃ߮ࠩࡦࠨᧄߩᯏ⢻ᕈ⢻ߦߟߡߪ 㐿⊒ᒰᤨߩ߹߹ߢࠅ, ⸘᷹ߦኻߔࠆ♖ᐲⷐ᳞ߩჇᄢߦ ᔕ߃ࠆߎߣ߇࿎㔍ߦߥߞߡ߈ߚߎߣߦട߃, ⠧ൻߦࠃ ࠆ㓚߿ਇౕว߇⋧ᰴߛߚ 2008 ᐕߦታㆇ↪ࠍ
ᱛߒߡߚ.
ᓟ⛮ࠪࠬ࠹ࡓߦߟߡ,ߎߩേ⊛ᄌ⸘᷹ࠪࠬ࠹ࡓߩ
⠧ൻߦࠃࠆਇౕว߇㗫⊒ߔࠆࠃ߁ߦߥߞߚ 2004 ᐕ߆ ࠄᬌ⸛ࠍᆎߚ. ᓟ⛮ࠪࠬ࠹ࡓߢߪ, ᓥ᧪ߩ㕖ធ⸅⥄
േ⸘᷹ߣ߁․ᓽࠍ〯ⷅߒ, ߐࠄߦ⸘᷹ᕈ⢻ᯏ⢻ࠍะ
ߐߖࠆߎߣࠍ⋡ᮡߣߒߚ. ߘߩ⚿ᨐ,㕙ౝᝄേߩ⸘᷹, CCD ࠞࡔࠍ↪ߚᒻ⁁࠺࠲ᚑല₸ൻ╬ߩએ೨ߩ
ࠪࠬ࠹ࡓࠃࠅఝࠇߚᯏ⢻ࠍ߃ߚ, ᄙゲᝄേ㕖ធ⸅⥄േ
⸘ ᷹ ࠪ ࠬ ࠹ ࡓ MaVES (Multi-axis Vibration Evaluating System) ߇2010ᐕ3ߦቢᚑߒߚ㧔Fig.1.2㧕.
ᧄ⾗ᢱߢߪ,ߎߩᣂࠪࠬ࠹ࡓߩ⸘᷹ߩ ⚵ߺߣⷐ,
᭽, ᯏ⢻, ⸘᷹ᣇᴺߦߟߡㅀߴࠆߣߣ߽ߦ, ⸘᷹
ࠍ⚫ߔࠆ.
ࠪࠬ࠹ࡓߩⷐ ࠪࠬ࠹ࡓߩ᭴ᚑ
MaVESߪ,ᝄേ․ᕈߩ⸘᷹߆ࠄ⸃ᨆ߹ߢࠍⴕ߁ߚߦ,
3D ࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߣࡦࠨ⟎ᓮࡠࡏ࠶࠻, ߎࠇࠄߩᓮࠍหᦼߐߖࠆ⛔ว࠰ࡈ࠻࠙ࠚࠕ, ࡕ࠳࡞
⸃ᨆ࠰ࡈ࠻࠙ࠚࠕ߆ࠄ᭴ᚑߐࠇࠆ㧔Fig.2㧕. 3Dࠬࠠࡖ࠾
ࡦࠣᝄേ⸘,ࡦࠨ⟎ᓮࡠࡏ࠶࠻,ࡕ࠳࡞⸃ᨆ࠰
ࡈ࠻࠙ࠚࠕߪߘࠇߙࠇ᳢↪ຠߢࠅ,⁛┙ߒߡ↪ߔࠆ ߎߣ߇น⢻ߢࠆ.
3D ࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߪ, ߎߩࠪࠬ࠹ࡓߩࠦࠕߣߥ ࠆㇱಽߢ, ࠩߦࠃࠅ 3 ゲᣇะߩᝄേ㧔㕙ᄖ,㕙ౝ㧕 ࠍᤨ㑆߹ߚߪᵄᢙ㗔ၞߢ⸘᷹ߢ߈ࠆ. ߹ߚౝ⬿ߩ࠰ࡈ
࠻࠙ࠚࠕ㧔PSV ࠰ࡈ࠻࠙ࠚࠕ㧕ߦࠃࠅ, ⸘᷹ὐߩ⸳ቯ߆ ࠄ⸘᷹࠺࠲ߩ␜,ታⒿ⸃ᨆ⚿ᨐߩ␜߹ߢࠍⴕ߁ ࡊࡐࠬ࠻ᯏ⢻, ࡦࠨㇱߩࡒࠍᓮߔࠆߎߣߢ
৻ቯߩࠛࠕߩࠩࠬࠠࡖࡦࠍⴕ߁ᯏ⢻ࠍߒߡ
ࠆ.
ࡦࠨ⟎ᓮࡠࡏ࠶࠻ߪ, 3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘
ߩࡦࠨߩ⟎ࠍⴕ߁ߚߩࠕࡓဳߩ6ゲ㑐▵
ࡠࡏ࠶࠻ߢࠆ. ᓥ᧪ߩࠃ߁ߦਃ⣉߿᨞᭴ߢࡦࠨࠍ
࠶࠻ߔࠆᚻ㑆߇ߥߊ, ࡦࠨࠍᏗᦸߩ⟎ߦ◲ଢߦ
࠶࠻ߔࠆߎߣ߇ߢ߈ࠆ.
⛔ว࠰ࡈ࠻࠙ࠚࠕߪ, 3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߣࡠࡏ࠶
࠻ߩേࠍหᦼߐߖࠆߎߣߢ, ᐢ▸࿐ߩ⸘᷹ὐߩᝄേ
ࠍ⥄േߢ⸘᷹ߢ߈ࠆࠃ߁ߦߔࠆߚߩ࠰ࡈ࠻࠙ࠚࠕߢ
ࠆ.
ࡕ࠳࡞⸃ᨆ࠰ࡈ࠻࠙ࠚࠕߪ, 3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘
㧔߅ࠃ߮ࡦࠨ⟎ᓮࡠࡏ࠶࠻,⛔ว࠰ࡈ࠻࠙ࠚࠕ㧕 ߦࠃߞߡขᓧߒߚᝄേ․ᕈ࠺࠲ࠍ↪ߡ, ࡕ࠼⸃ᨆ ࠍⴕ߁ߚߩ࠰ࡈ࠻࠙ࠚࠕߢࠆ.
⸘᷹ߩ⚵ߺ
ᝄേ⸘᷹ߪ,ࠩࡦࠨࠍ↪ߡ,ᝄേߒߡࠆ ଏ⹜ߩᝄേㅦᐲࠍᬌߔࠆߎߣߢⴕ߁. ࠩ࠼࠶
ࡊലᨐࠍ↪ߒߡࠆߚ, ࠩߩゲᣇะߩᝄ
േㅦᐲߩߺ߇ᬌߢ߈ࠆ. MaVESߢߪ, 3บߩࠩ
ࡦࠨࠍหゲߦߥࠄߥࠃ߁ߦ㈩⟎ߔࠆߎߣߢ, 3ᣇะ ߩᝄേㅦᐲࠍᬌߒ, ฦᣇะߩᚑಽࠍṶ▚ߔࠆߎߣߢX, Y, Zߩ⋥ߔࠆ3ゲߩᝄേㅦᐲࠍ⸘᷹ߢ߈ࠆ⚵ߺߢ
ࠆ.
ၮᧄ⊛ߦ1࿁ߩ⸘᷹ߢ,છᗧߩ1ὐߩ3ゲᣇะᝄേㅦᐲ ࠍ⸘᷹ߢ߈ࠆ߇, ࡦࠨߩࠩߩࠬࠠࡖ࠾ࡦࠣᯏ
⢻ࠍ↪ߡⶄᢙߩ⸘᷹ὐࠍ㗅ᰴࠬࠠࡖࡦߔࠆߎߣߢ,ⶄ ᢙ⸘᷹ὐߩ⸘᷹߇น⢻ߣߥࠆ. ࠩߩࠬࠠࡖ࠾ࡦࠣ
ߪ, ࡦࠨߦౝ⬿ߩࠟ࡞ࡃࡁࡒࠍേߐߖࠆߎߣ ߢታߒߡࠆ. ࡒߩേ▸࿐ౝߢࠇ߫,ࡠࡏ࠶
࠻߅ࠃ߮หᦼ↪ߩ⛔ว࠰ࡈ࠻࠙ࠚࠕࠍ↪ߔࠆߎߣߥߊ,
3D ࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߩߺߢᝄേ⸘᷹߇น⢻ߢࠆ. ࠃࠅᐢ▸࿐ߩ⸘᷹ߦኻߒߡߪ, ࡦࠨࠍタߒߡ
ࠆࡠࡏ࠶࠻ࠍേ߆ߔߎߣߢታߐߖߡࠆ. ࡠࡏ࠶࠻ߩ
േ,ࡦࠨߩࠬࠠࡖ࠾ࡦࠣᯏ⢻, ࠺࠲ߩขࠅㄟߺ ࠍหᦼߐߖࠆ⚵ߺ߇ࠊߞߡ߅ࠅ, ⚿ᨐߣߒߡᐢ▸
࿐ߦࠆⶄᢙߩ⸘᷹ὐࠍ⥄േߢ⸘᷹ߔࠆߎߣ߇น⢻ߣߥ ߞߡࠆ.
ߐࠄߦࠩࡦࠨߦߪ CCD ࠞࡔ߇ౝ⬿ߐࠇ ߡ߅ࠅ, PCߦࡆ࠺ࠝ↹ࠍ␜ߒߡ⸘᷹ὐࠍ↹㕙ߢ
⸳ቯߔࠆߎߣ߇ߢ߈ࠆ. หߓߊࡦࠨߦౝ⬿ߩ᷹㐳࡙
࠾࠶࠻㧔Geometry Scan Unit㧕ࠍ↪ߡࡦࠨ߆ࠄ᷹ቯ
ὐ߹ߢߩ〒㔌ࠍ⸘᷹ߔࠆߎߣߢ, ࡠࡏ࠶࠻ߩ⟎ᐳᮡ߆ ࠄ⸘▚ߒߚࡦࠨߩ⟎ᐳᮡࠍၮߦ, ⸘᷹ὐߩᐳᮡࠍ
⸘▚ߔࠆߎߣ߇ߢ߈ࠆ.
ࠪࠬ࠹ࡓߩ⚦
ᧄ┨ߢߪ,ฦࡂ࠼࠙ࠚࠕ,࠰ࡈ࠻࠙ࠚࠕߦߟߡ⚦
ࠍ␜ߔ.
3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘
ᝄേ⸘ߩ᭴ᚑ
3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘㧔Polytec␠ PSV-400-3D-H㧕 ߪ, Fig.3.1 ߦ ␜ ߔ ࠃ ߁ ߦ, 3 บ ߩ Scanning Head 㧔PSV-I-400㧕, 3บߩController㧔OFV-5000㧕, Junction Box 㧔PSV-401-3D ߅ ࠃ ߮ PSV-E-408㧕, Data Management System㧔PSV-W-400-3D,Fig3-1ߢߪනߦPCߣ␜㧕߆ࠄ
᭴ᚑߐࠇࠆ. ߎࠇࠄߩᯏེߩ߁ߜ, 3บߩ Scanning Head 㧔ߘࠇߙࠇTOP, RIGHT, LEFT㧕ߪᰴ▵ߢㅀߴࠆࡦࠨ
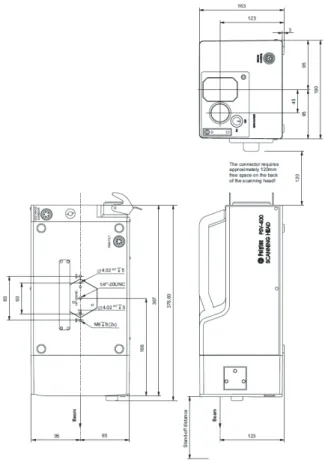
⟎ᓮࡠࡏ࠶࠻ߩࠕࡓవ┵ߦタߐࠇ㧔Fig.3.2㧕, ᱷ ࠅߩᯏེߪ࠶ࠢߦ⚊ߐࠇߡࠆ㧔Fig.3.3㧕. ෳ⠨ߣ ߒߡScanning Headߩਃ㕙࿑ࠍFig.3.4ߦ␜ߔ.
Scanning HeadߪControllerߣฦޘធ⛯ߐࠇ,ࠩߩ ᾖߣฃశࠍⴕ߁.ߥ߅, ฦScanning HeadߦߪCCDᣇᑼ ߩ Video Camera ߇ౝ ⬿ ߐ ࠇ ߡ ࠆ. ߐ ࠄ ߦ, TOP ߩ Scanning HeadߦߪGeometry Scan Unit㧔PSV-A-420㧕߇ข ࠅઃߌࠄࠇߡࠆ.
Junction Boxߪࠕ࠽ࡠࠣ/࠺ࠫ࠲࡞ାภߩജࠍⴕ߁. PSV-401-3Dߪ4ജ4ജߢࠆ߇,PSV-E-408ࠍട߃ࠆ ߎߣߢߐࠄߦ4ജ߇ᒛߐࠇ, ૬ߖߡ8ജ4ജߣ ߥߞߡࠆ.
Data Management Systemߪ, PC߅ࠃ߮PSV࠰ࡈ࠻࠙ࠚ ࠕ߆ࠄ᭴ᚑߐࠇ, Junction Boxߣߩ࠺࠲ߩㅍฃା߿, ⸘
᷹࠺࠲ߩಣℂࠍⴕ߁.
Fig.3.1 3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߩ᭴ᚑ
Fig.3.2 Scanning Head
Fig.3.3 3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߩ᭴ᚑ㧔࠶ࠢ㧕
Fig.3.4 Scanning Headߩਃ㕙࿑
ᝄേ⸘ߩ᭽
ᝄ േ ⸘ ߦ ㆡ ↪ ߐ ࠇ ߡ ࠆ ၮ Ḱ ࠍ Table 3.1 ߦ ␜ ߔ. Scanning Head߅ࠃ߮ࠩ࠳ࠗࠝ࠼ᑼߩGeometry Scan Unitߩࠩߪ, ᵄ㐳ࡦࠫ߇400nm߆ࠄ700nm ߩ▸࿐ߩนⷞశߢജ߇ 1mW ᧂḩߢࠆߚ,
ࠩశߩోၮḰߢࠆ EN60825-1 ߦ߅ߡ laser
class 2 ߦಽ㘃ߐࠇࠆ. ߎࠇߪ,⋥ធశḮ߇⋡ߦߞߡ߽,
߹߫ߚ߈╬ߩᗵᔕߦࠃࠅ⋡߳ߩోᕈ߇ߚࠇࠆ
ࡌ࡞ߢࠆ.
Controllerߩ᭽ࠍTable3.2㨪3.8ߦ, Junction Boxߩ
᭽ࠍTable 3.9㨪3.13ߦ, Data Management Systemߩ᭽ࠍ Table 3.13㨪3.16ߦ, Scanning Headߩ᭽ࠍTable 3.17㨪 3.22ߦ␜ߔ.
Table 3.1 Standard Applied Laser
safety
IEC/EN 60825-1:2003-10
(safety of laser products, complies to US21 CFR
1040.10 and 1040.11 except for deviations pursuant to laser notice no.50, dated 26 July 2001)
Electrical safety
IEC/EN 61010-1:2002-08
(safety requirements for electrical equipment for measurement, control and laboratory use)
EMC IEC/EN 61326-1:2006-10
(EMC requirements on Emission and Immunity electrical equipment for measurement, control and laboratory use) Emission: Limit Class B
:IEC/EN 61000-3-2 and 61000-3-3
Immunity: IEC/EN 61000-4-2 to 61000-4-6 and IEC/EN 61000-4-11
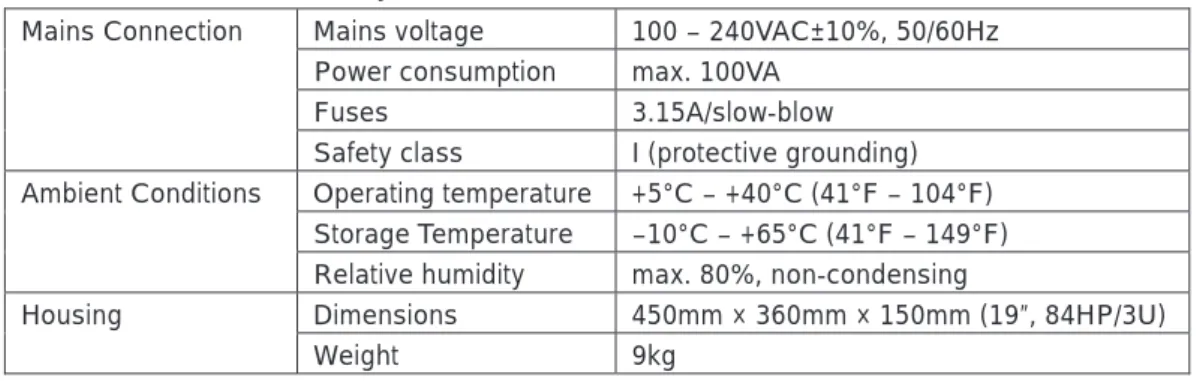
Table 3.2 Controller OFV-5000 (General Data) Mains
Connection
Mains voltage 100 – 240VAC±10%, 50/60Hz
Power consumption
max. 100VA Fuses 2.0A/slow-blow Safety class I (protective
grounding) Ambient
Conditions
Operating temperature
+5°C – +40°C (41°F – 104°F)
Storage Temperature
–10°C – +65°C (41°F – 149°F)
Relative humidity
max. 80%, non-condensing
Housing Dimension 450mm × 360mm × 150mm (19”, 84HP/3U)
Weight 10kg
Calibration Calibration recommended
every 2 years
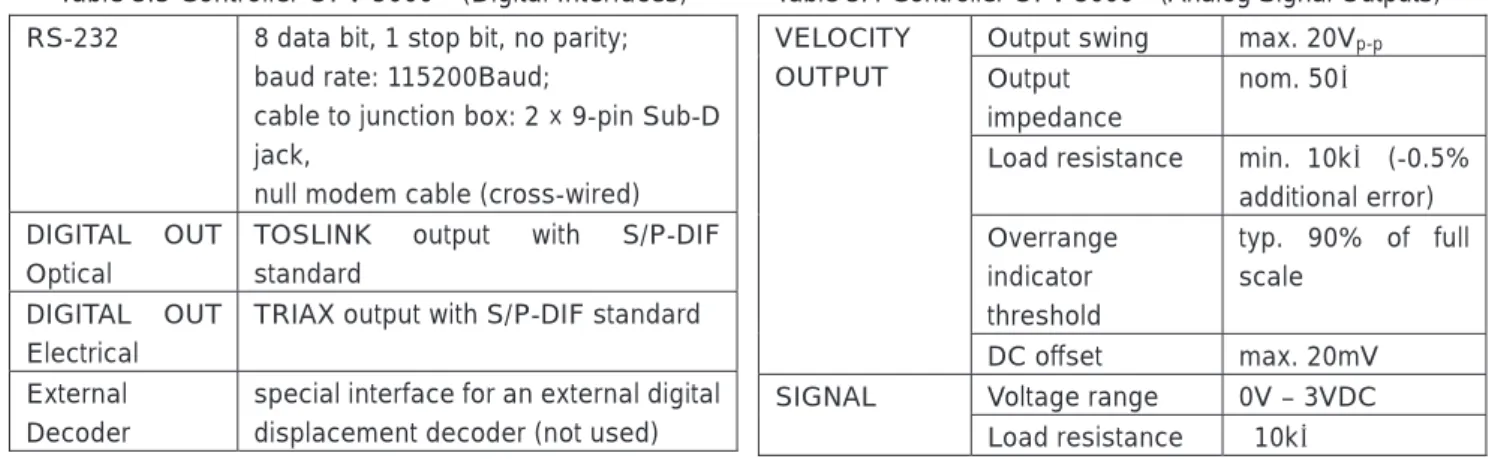
Table 3.3 Controller OFV-5000 (Digital Interfaces) RS-232 8 data bit, 1 stop bit, no parity;
baud rate: 115200Baud;
cable to junction box: 2 × 9-pin Sub-D jack,
null modem cable (cross-wired) DIGITAL OUT
Optical
TOSLINK output with S/P-DIF standard
DIGITAL OUT Electrical
TRIAX output with S/P-DIF standard External
Decoder
special interface for an external digital displacement decoder (not used)
Table 3.4 Controller OFV-5000 (Analog Signal Outputs) VELOCITY
OUTPUT
Output swing max. 20Vp-p
Output impedance
nom. 50ȍ
Load resistance min. 10kȍ (-0.5%
additional error) Overrange
indicator threshold
typ. 90% of full scale
DC offset max. 20mV SIGNAL Voltage range 0V – 3VDC
Load resistance 10kȍ Table 3.5 Controller OFV-5000 (Decoder Specific Properties - Velocity decoder VD-08) Measurement range
[mm/s/V] 0.2 0.5 1 2 5 10 20 50
Full scale (peak) [m/s] 0.002 0.005 0.01 0.02 0.05 0.1 0.2 0.5 Frequency range
fmin [Hz]
fmax [kHz] 0
5 0
5 0
10 0
10 0
20 0
20 0
25 0
25
Max. acceleration [g] 6.4 16 64 256 640 1280 3200 8000
Frequency response 0.05Hz – 3kHz [dB]
3kHz – 4kHz [dB]
4kHz – 5kHz [dB]
±0.05 +0.1/–0.
3 +0.1/–1
±0.05 +0.1/–0.
3 +0.1/–1
- - -
- - -
- - -
- - -
- - -
- - - 0.05Hz – 7kHz [dB]
7kHz – 8kHz [dB]
8kHz – 10kHz [dB]
- - -
- - -
±0.05 +0.1/–0.
3 +0.1/–1
- - -
- - -
- - -
- - -
- - - 0.05Hz – 10kHz [dB]
10kHz – 14kHz [dB]
14kHz – 20kHz [dB]
- - -
- - -
- - -
±0.05 +0.1/–0.
3 +0.1/–1
±0.05 +0.1/–0.
3 +0.1/–1
±0.05 +0.1/–0.
3 +0.1/–1
- - -
- - - 0.05Hz – 11kHz [dB]
10kHz – 16kHz [dB]
16kHz – 25kHz [dB]
- - -
- - -
- - -
- - -
- - -
- - -
±0.1 +0.1/–0.
3 +0.1/–1
±0.1 +0.1/–0.
3 +0.1/–1 Resolution
frequency-dependent [ȝm/s/ξ]
typically [ȝm/s/ξ]
< 0.01
< 0.005 < 0.01
< 0.005 < 0.02
< 0.01 < 0.02
< 0.01 < 0.02
< 0.01 0.01 – 0.04
< 0.02
0.2 – 0.08
< 0.03
0.04 – 0.2
< 0.05 Frequency-dependent
phase
shift pD (typ.) [°/kHz] –107 –107 –105 –49.3 –33.8 –33.8 –8.7 –8.7
Signal delay tD(typ.) [ȝs] 297 297 290 137 94 94 24.3 24.3
Calibration error [%]
TU = +5°C – +40°C
(TU =41°F – 104°F) ±1 ±1 ±1 ±1 ±1 ±1 ±1 ±1
Linearity error [%] < 0.1 < 0.1 < 0.1 < 0.1 < 0.1 < 0.1 < 0.1 < 0.1 Harmonic distortions [dBc] < –50 < –50 < –54 < –54 < –54 < –54 < –54 < –54 Spurious signals
(non-harmonic) [dBFS] < –60 < –68 < –74 < –80 < –83 < –86 < –90 < –90
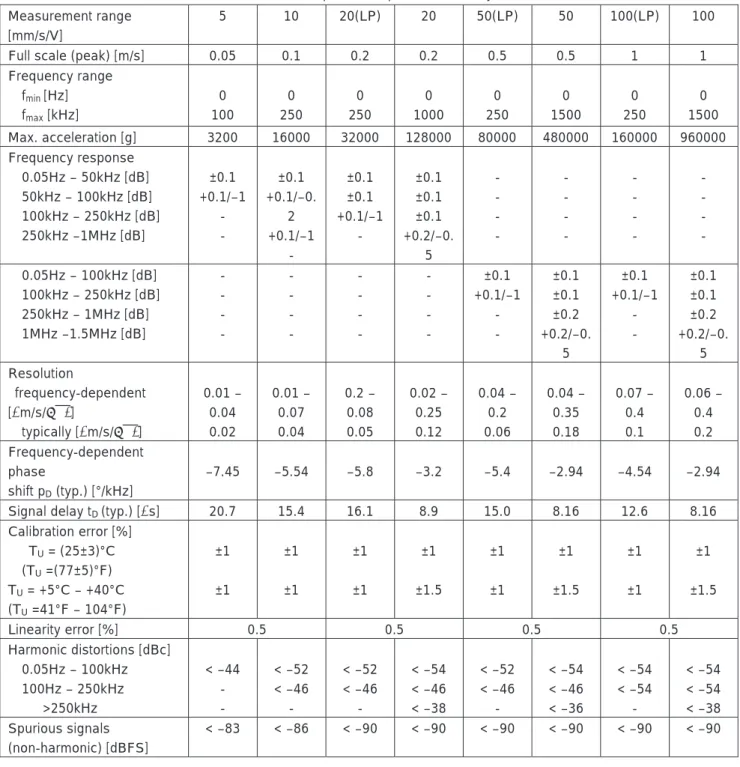
Table 3.6 Controller OFV-5000 (Decoder Specific Properties – Velocity decoder VD-09 ) (Part 1 of 2) Measurement range
[mm/s/V]
5 10 20(LP) 20 50(LP) 50 100(LP) 100
Full scale (peak) [m/s] 0.05 0.1 0.2 0.2 0.5 0.5 1 1
Frequency range fmin [Hz]
fmax [kHz]
0 100
0 250
0 250
0 1000
0 250
0 1500
0 250
0 1500 Max. acceleration [g] 3200 16000 32000 128000 80000 480000 160000 960000 Frequency response
0.05Hz – 50kHz [dB]
50kHz – 100kHz [dB]
100kHz – 250kHz [dB]
250kHz –1MHz [dB]
±0.1 +0.1/–1
- -
±0.1 +0.1/–0.
2 +0.1/–1
-
±0.1
±0.1 +0.1/–1
-
±0.1
±0.1
±0.1 +0.2/–0.
5
- - - -
- - - -
- - - -
- - - - 0.05Hz – 100kHz [dB]
100kHz – 250kHz [dB]
250kHz – 1MHz [dB]
1MHz –1.5MHz [dB]
- - - -
- - - -
- - - -
- - - -
±0.1 +0.1/–1
- -
±0.1
±0.1
±0.2 +0.2/–0.
5
±0.1 +0.1/–1
- -
±0.1
±0.1
±0.2 +0.2/–0.
5 Resolution
frequency-dependent [ȝm/s/ξ]
typically [ȝm/s/ξ]
0.01 – 0.04 0.02
0.01 – 0.07 0.04
0.2 – 0.08 0.05
0.02 – 0.25 0.12
0.04 – 0.2 0.06
0.04 – 0.35 0.18
0.07 – 0.4 0.1
0.06 – 0.4 0.2 Frequency-dependent
phase
shift pD (typ.) [°/kHz]
–7.45 –5.54 –5.8 –3.2 –5.4 –2.94 –4.54 –2.94
Signal delay tD(typ.) [ȝs] 20.7 15.4 16.1 8.9 15.0 8.16 12.6 8.16
Calibration error [%]
TU = (25±3)°C (TU =(77±5)°F) TU = +5°C – +40°C (TU =41°F – 104°F)
±1
±1
±1
±1
±1
±1
±1
±1.5
±1
±1
±1
±1.5
±1
±1
±1
±1.5
Linearity error [%] 0.5 0.5 0.5 0.5
Harmonic distortions [dBc]
0.05Hz – 100kHz 100Hz – 250kHz
>250kHz
< –44 - -
< –52
< –46 -
< –52
< –46 -
< –54
< –46
< –38
< –52
< –46 -
< –54
< –46
< –36
< –54
< –54 -
< –54
< –54
< –38 Spurious signals
(non-harmonic) [dBFS]
< –83 < –86 < –90 < –90 < –90 < –90 < –90 < –90
Table 3.7 Controller OFV-5000 (Decoder Specific Properties – Velocity decoder VD-09 ) (Part 2 of 2) Measurement range [mm/s/V] 200(LP) 200 500(LP) 500 1000(LP) 1000
Full scale (peak) [m/s] 2 2 5 5 10 10
Frequency range fmin [Hz]
fmax [kHz]
0 250
0 2500
0 250
0 2500
0 250
0 1500 Max. acceleration [g] 320000 3200000 800000 8000000 1600000 9600000 Frequency response
0.05Hz – 100kHz [dB]
100kHz – 250kHz [dB]
250kHz – 1MHz [dB]
1MHz –1.5MHz [dB]
1.5MHz – 2.5MHz [dB]
±0.1 +0.1/–1
- - -
±0.1
±0.1
±0.2
±0.2 +0.5/–1.5
±0.1 +0.1/–1
- - -
±0.1
±0.1
±0.2
±0.2 +0.5/–1.5
±0.1 +0.1/–1
- - -
±0.1
±0.1
±0.2 +0.2/–0.5
- Resolution
frequency-dependent [ȝm/s/ξ]
typically [ȝm/s/ξ]
0.13 – 0.8 0.15
0.1 – 1 0.5
0.25 – 2 0.25
0.25– 2 0.6
0.5 – 4 0.5
0.5 – 4 0.7 Frequency-dependent phase
shift pD (typ.) [°/kHz] –4.75 –1.35 –2.10 –1.34 –2.57 –2.14
Signal delay tD(typ.) [ȝs] 13.2 3.76 5.83 3.73 7.13 5.95
Calibration error [%]
TU = (25±3)°C (TU =(77±5)°F) TU = +5°C – +40°C (TU =41°F – 104°F)
±1
±1
±1
±1.5
±1
±1
±1
±1.5
±1
±1
±1
±1.5
Linearity error [%] 0.5 0.5 0.5
Harmonic distortions [dBc]
0.05Hz – 100kHz 100Hz – 250kHz
>250kHz
< –54
< –54 -
< –54
< –54
< –38
< –54
< –54 -
< –54
< –54
< –36
< –54
< –54 -
< –54
< –50
< –38 Spurious signals (non-harmonic) [dBFS] < –90 < –90 < –90 < –90 < –90 < –90
Table 3.8 Controller OFV-5000 (Analog Low Pass and High Pass Filter) Low Pass Filter High Pass Filter Filter type Bessel 3rd order Butterworth 4th order Cutoff frequencies 5kHz, 20kHz, 100kHz
(adjustable)
100Hz
Frequency roll-off –60dB/dec = –18dB/oct –80dB/dec = –24dB/oct Stop band attenuation > 70dB > 70dB
Table 3.9 Junction Box PSV-E-401-3D (General Data) Mains Connection Mains voltage 100 – 240VAC±10%, 50/60Hz
Power consumption max. 100VA
Fuses 3.15A/slow-blow
Safety class I (protective grounding) Ambient Conditions Operating temperature +5°C – +40°C (41°F – 104°F)
Storage Temperature –10°C – +65°C (41°F – 149°F) Relative humidity max. 80%, non-condensing
Housing Dimensions 450mm × 360mm × 150mm (19”, 84HP/3U)
Weight 9kg
Table 3.10 Junction Box PSV-E-401-3D (Digital Interfaces) RS-232 (TOP, LEFT,
RIGHT)
8 data bit, 1 stop bit, no parity;
Transfer rate: 115200Baud (for PSV-3D);
cable to the junction box: 2 × 9-pin Sub-D jack, null modem cable (cross-wired)
USB Universal Serial Bus Type B;
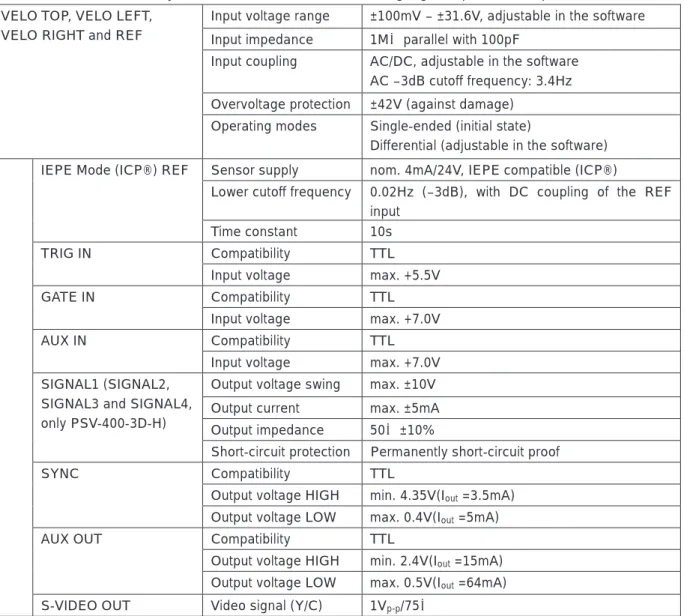
cable to the PC: 1× USB Type A, 1 × USB Type B Table 3.11 Junction Box PSV-E-401-3D (Analog Signal Inputs and Outputs) VELO TOP, VELO LEFT,
VELO RIGHT and REF
Input voltage range ±100mV – ±31.6V, adjustable in the software Input impedance 1Mȍ parallel with 100pF
Input coupling AC/DC, adjustable in the software AC –3dB cutoff frequency: 3.4Hz Overvoltage protection ±42V (against damage)
Operating modes Single-ended (initial state)
Differential (adjustable in the software) IEPE Mode (ICP®) REF Sensor supply nom. 4mA/24V, IEPE compatible (ICP®)
Lower cutoff frequency 0.02Hz (–3dB), with DC coupling of the REF input
Time constant 10s
TRIG IN Compatibility TTL
Input voltage max. +5.5V
GATE IN Compatibility TTL
Input voltage max. +7.0V
AUX IN Compatibility TTL
Input voltage max. +7.0V SIGNAL1 (SIGNAL2,
SIGNAL3 and SIGNAL4, only PSV-400-3D-H)
Output voltage swing max. ±10V Output current max. ±5mA Output impedance 50ȍ ±10%
Short-circuit protection Permanently short-circuit proof
SYNC Compatibility TTL
Output voltage HIGH min. 4.35V(Iout =3.5mA) Output voltage LOW max. 0.4V(Iout =5mA)
AUX OUT Compatibility TTL
Output voltage HIGH min. 2.4V(Iout =15mA) Output voltage LOW max. 0.5V(Iout =64mA) S-VIDEO OUT Video signal (Y/C) 1Vp-p/75ȍ
Table 3.12 Junction Box PSV-E-408 (General Data)
Ambient Conditions Operating temperature +5°C – +40°C (41°F – 104°F) Storage Temperature –10°C – +65°C (41°F –
149°F)
Relative humidity max. 80%, non-condensing
Housing Dimensions 482mm × 303mm × 23mm
Weight 1.5kg
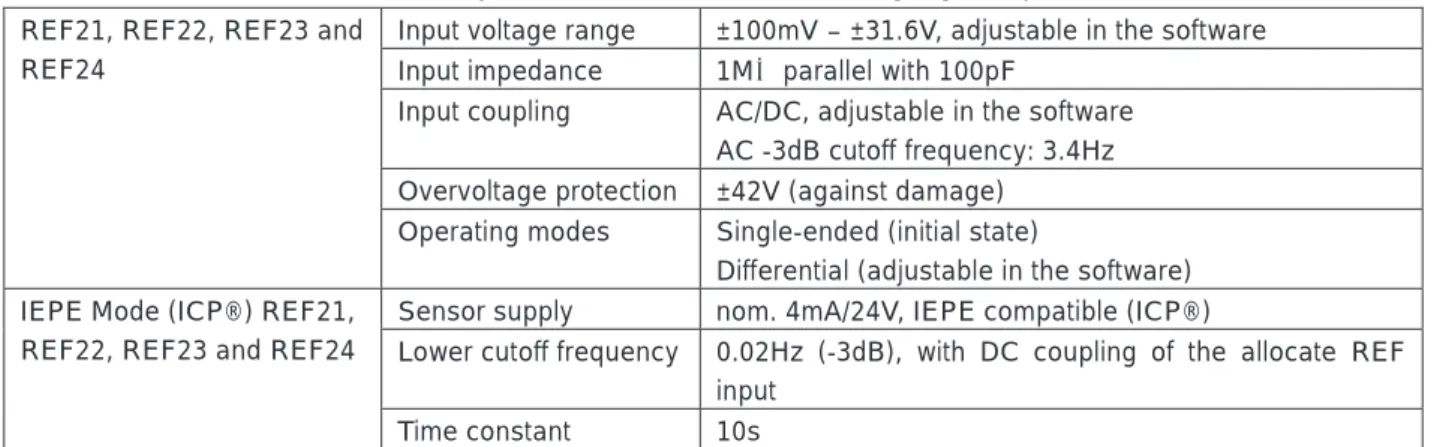
Table 3.13 Junction Box PSV-E-408 (Analog Signal Inputs) REF21, REF22, REF23 and
REF24
Input voltage range ±100mV – ±31.6V, adjustable in the software Input impedance 1Mȍ parallel with 100pF
Input coupling AC/DC, adjustable in the software AC -3dB cutoff frequency: 3.4Hz Overvoltage protection ±42V (against damage)
Operating modes Single-ended (initial state)
Differential (adjustable in the software) IEPE Mode (ICP®) REF21,
REF22, REF23 and REF24
Sensor supply nom. 4mA/24V, IEPE compatible (ICP®)
Lower cutoff frequency 0.02Hz (-3dB), with DC coupling of the allocate REF input
Time constant 10s
Table 3.14 PC PSV-W-401-3D (General Data)
Mains Connection Mains voltage 100 – 240VAC±10%, 50/60Hz Power consumption max. 350VA
Safety class I (protective grounding) Ambient Conditions Operating temperature +5°C – +40°C (41°F – 104°F)
Storage Temperature –10°C – +65°C (41°F – 149°F) Relative humidity max. 80%, non-condensing
Housing Dimensions 450mm × 550mm × 190mm (19”, 84HP/4U)
Weight 18kg
Table 3.15 PC PSV-W-401-3D (PC Configuration)
Processor min. AMD AthlonTM XP3000+; 2.6GHz; 1GByte RAM
Hard disk drive (HDD) > 120GB
Operating system Microsoft® Windows® XP or 2000 Network connector Ethernet
DVD recorder Refer to manual of the manufacturer Table 3.16 PC PSV-W-401-3D (Data Acquisition)
Data acquisition board 2 × PCI-4462
Input channel 8
Resolution 24bit
Maximum bandwidth 80kHz
Internal function generator PCI-6711 Output channel /simultaneous) 4
Resolution 12bit
Maximum bandwidth 80kHz
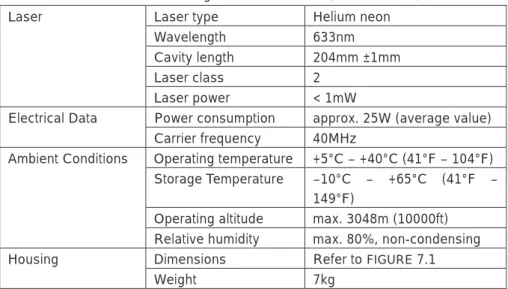
Table 3.17 Scanning Head PSV-I-400 (General Data)
Laser Laser type Helium neon
Wavelength 633nm
Cavity length 204mm ±1mm
Laser class 2
Laser power < 1mW
Electrical Data Power consumption approx. 25W (average value) Carrier frequency 40MHz
Ambient Conditions Operating temperature +5°C – +40°C (41°F – 104°F) Storage Temperature –10°C – +65°C (41°F –
149°F)
Operating altitude max. 3048m (10000ft) Relative humidity max. 80%, non-condensing Housing Dimensions Refer to FIGURE 7.1
Weight 7kg
Table 3.18 Scanning Head PSV-I-400 (Optics)
Front lens model Long Range (LR) Mid Range (MR)
Focal length [mm] 100 60
Minimum stand-off distance [mm] 350 40 Aperture diameter (1/e2) [mm] 10 – 11 2 – 6.6 Spot diameter (typ.) [ρ]
@ 100mm @ 200mm @ 500mm @ 1000mm @ 2000mm @ 3000mm @ 5000mm
@ each additional meter plus
- - 33 43 147 222 368 74
31 41 73 132 255 376 624 126
Visibility maxima 99mm + (nI);
n=0, 1, 2 – ; I=204mm±1mm Table 3.19 Scanning Head PSV-I-400 (Visibility Maxima)
Visibility Maxima (in mm) for I=204mm
99 1731 3363 4995 6627 8259 303 1935 3567 5199 6831 8463 507 2139 3771 5403 7035 8667 711 2343 3975 5607 7239 8871 915 2547 4179 5811 7443 9075 1119 2751 4383 6015 7647 9279 1323 2955 4587 6219 7851 9483 1527 3159 4791 6423 8055 –
Table 3.20 Scanning Head PSV-I-400 (Scanner)
Type Servo-controlled galvo
motor
Maximum deflection Horizontal: ±20°
Vertical: ±20°
Angular resolution < 0.002°
Point stability < 0.01°/hour (after warm-up)
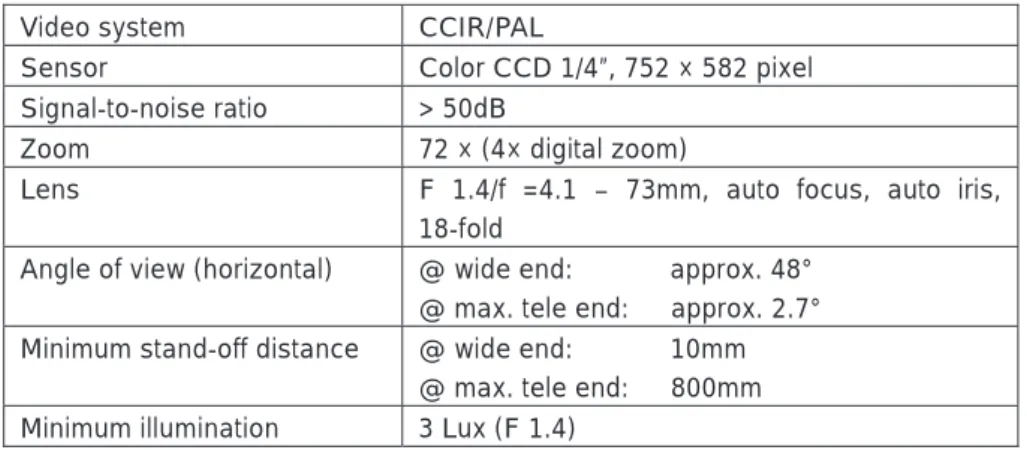
Table 3.21 Scanning Head PSV-I-400 (Video Camera)
Video system CCIR/PAL
Sensor Color CCD 1/4”, 752 × 582 pixel Signal-to-noise ratio > 50dB
Zoom 72 × (4× digital zoom)
Lens F 1.4/f =4.1 – 73mm, auto focus, auto iris, 18-fold
Angle of view (horizontal) @ wide end: approx. 48°
@ max. tele end: approx. 2.7°
Minimum stand-off distance @ wide end: 10mm
@ max. tele end: 800mm Minimum illumination 3 Lux (F 1.4)
Table 3.22 Scanning Head PSV-I-400 (Geometry Scan Unit PSV-A-420 : General Data)
Laser Laser type Laser diode
Wavelength 620 – 690nm
Laser class 2
Laser power < 1mW
Accuracy of the measurement distance ±2.5mm Max. distance between the focal points
of the two laser beams.
< 5mm (2ı)
It will not be necessarily measured in the focal points of the laser beam.
Ambient Conditions Operating temperature +5°C – +40°C (41°F – 104°F) Storage Temperature –10°C – +65°C (41°F – 149°F) Relative humidity max. 80%, non-condensing
Housing Dimensions Refer also to FIGURE 7.3
Weight 0.6Kg
⸘᷹ᯏ⢻
Scanning Head ߆ࠄᾖߔࠆࠩߦࠃࠅଏ⹜ߩ
ᝄേㅦᐲࠍᬌߔࠆߎߣ߇ߢ߈ࠆ߇,࠼࠶ࡊലᨐࠍ
↪ߒߡࠆߚ,ᬌߢ߈ࠆߩߪࠩߩశゲᣇะ ߩᝄേㅦᐲߩߺߢࠆ.ߒ߆ߒ,3บߩScanning Headࠍ↪
ߡ1ὐߦ3ᧄߩࠩࠍᾖߔࠆߎߣߦࠃࠅ3ᣇะ ߩᝄേㅦᐲࠍᬌߒ,⋥ᣇะᚑಽߦಽ⸃ߔࠆߎߣߢx, y, z ߩ 3 ᣇะߩᝄേㅦᐲᚑಽࠍ⸘᷹น⢻ߢࠆ.ߥ߅,ฦ
Scanning Head ߪ,ࠩߩశゲࠍࠟ࡞ࡃࡁࡒߦࠃ
ࠅࠬࠠࡖࡦߢ߈ࠆᯏ᭴㧔2 ᣇะ߳ฦ±20°㧕ࠍߒߡ߅
ࠅ,Scanning Head⥄ࠍേ߆ߔߎߣߥߊ,৻ቯࠛࠕ㧔⋡
ߣߒߡ,Scanning Headߣኻ⽎‛ߩ〒㔌ࠍ700mmߣߒߚ ႐วߦ,400㨪500mm྾ᣇ㧕ࠍ⸘᷹น⢻ߢࠆ.
Scanning Headߦౝ⬿ߐࠇߚCCDᣇᑼߩVideo Camera ߦࠃࠆࡆ࠺ࠝ↹߆ࠄ,PC ߢ⸘᷹ὐࠍ⸳ቯߔࠆߎߣ߇ น⢻ߢࠆ.Video CameraߪฦScanning Headߦౝ⬿ߐࠇ ߡࠆ߇, ㅢᏱߪ TOPߩScanning Headߦౝ⬿ߩ Video Cameraߩߺࠍ↪ߔࠆ.
ߐࠄߦ,⸘᷹ὐߩ⟎ᐳᮡ߽᳞ࠆߎߣ߇ߢ߈ࠆ.ߎࠇ ߪ,ࡠࡏ࠶࠻ߩ⟎ᐳᮡࠍၮߦᓧࠄࠇࠆScanning Headߩ
⟎ߣⷺᐲ,ട߃ߡ TOP ߩ Scanning Head ߩ Geometry Scan Unitߢ⸘᷹ߒߚଏ⹜ߣScanning Head㑆ߩ〒㔌ࠍ ၮߦ᳞ࠆ⚵ߺߢࠆ. ᷹㐳↪ࠩߪ, ㅦᐲ⸘᷹
↪ࠩߣశḮࠍಾࠅᦧ߃ߡ↪ߒ, หߓࠬࠠࡖ࠾ࡦ
ࠣࡒࠍ↪ߔࠆ.
శቇ♽
Scanning HeadߪୃᱜMach-Zehnderᐓᷤ⸘ࠍౝㇱߦ
ߒ ߡ ߅ ࠅ,ߘ ߩ శ ቇ ♽ ߩ ࠦ ࡦ ࡈ ࠖ ࠡ ࡘ ࠪ ࡚ ࡦ ࠍ Fig.3.5 ߦ ␜ ߔ. ↪ ߔ ࠆ ࠩ ߪ,ࠠ ࡖ ࠕ ᵄ ᢙ
40MHzߩHe-Neࠩߢࠆ.శḮ߆ࠄߚะ
ࠩ ࡆ ࡓ ߪ ࠬ ࡊ ࠶ ࠲ BS1 ߢ Object Beam ߣ Reference Beamߦಽߌࠄࠇ,ߘߩ߁ߜObject Beamߪࠬࡊ
࠶࠲BS2߅ࠃ߮Ȝ/4ࡊ࠻ࠍㅢߓߡ,ଏ⹜ߦᾖߐ ࠇࠆ.ଏ⹜߆ࠄߒߚObject BeamߣReference Beam ߪࠬࡊ࠶࠲BS3ߢ৻✜ߦߥࠅ,Detectorߢߘߩᐓᷤࠍ
⸘᷹ߔࠆ.ߥ߅Bragg Cellߪㅒᣇะᝄേㅦᐲߩᬌߩߚ
ߦᵄᢙࠍࠝࡈ࠶࠻ߐߖࠆᓎഀࠍᨐߚߒߡࠆ. ࠩߪࡑ࡞࠴ࡕ࠼ࠩߢࠆߚ,ࡕ࠼
㑆ߩᐓᷤ߇ሽߒ,శߩାภࡌ࡞߇〒㔌ߦࠃߞߡ
ᄌ ൻ ߔ ࠆ.〒 㔌 ߣ ା ภ ࡌ ࡞ ߩ 㑐 ଥ ࠍ Fig.3.6 ߦ ␜ ߔ.Scanning Headߣኻ⽎‛ߩ〒㔌㧔Stand-off Distance㧕ߦ ߟߡߩᦨㆡ୯L(mm)ߪ,
ൌ ͻͻ כ ሺʹͲͶ േ ͳሻ
ߣߥߞߡࠆ.ߎߎߢ n ߪᢛᢙ㧔Ͳǡ ͳǡ ʹǡ ڮ㧕ߢࠆ. ߥ߅ Scanning Head ߩࡈࡠࡦ࠻ࡦ࠭ߪ LR (Long Range)ߣ MR(Mid Range)ߩ2⒳㘃߇ࠆ߇, MaVESߢߪLR߇ណ↪
ߐࠇߡࠆ㧔ਔ⠪ߢߪ, ᦨ⍴ߩStand-off Distance߇⇣ߥ ࠅ, LRߢߪ350mm, MRߢߪ40mmߣߥߞߡࠆ㧕.
Fig.3.5 శቇ♽ߩࠦࡦࡈࠖࠡࡘ࡚ࠪࡦ
Fig.3.6 〒㔌ߣାภࡌ࡞
ᝄേㅦᐲᬌᕈ⢻
ᝄേㅦᐲߩᬌ⢻ജߪ,Controller ߦౝ⬿ߩ Decoder ߦ ଐሽߔࠆ. Decoderߪ2⒳㘃㧔VD-08ߣVD-09㧕ࠍタߒ ߡ߅ࠅ,⸘᷹↪ㅜߦᔕߓߡಾࠅᦧ߃߇น⢻ߢࠆ.VD-08 ߪ8⒳㘃ߩࡦࠫ⸳ቯ߇น⢻ߢࠅ,ᦨᄢ0.5m/sߩᝄേㅦ
ᐲࠍ,0㨪25kHz ߩࠨࡦࡊࡦࠣᵄᢙߢ⸘᷹߇น⢻ߢ
ࠆ.Ყセ⊛ૐᵄᢙߦ․ൻߔࠆߎߣߢᗵᐲࠍᦨㆡൻߒ
ߡࠆ.VD-09 ߪᐢࠨࡦࡊࡦࠣᵄᢙߦኻᔕߒߡ
߅ࠅ,ᦨᄢ 10m/s ߩᝄേㅦᐲ,0㨪2.5MHz ߩࠨࡦࡊࡦࠣ
ᵄ ᢙ ߢ ⸘ ᷹ ߇ น ⢻ ߢ ࠆ.ߚ ߛ ߒ PC ౝ ⬿ ߩ Data Acquisition Board 㧔National InstrumentsPCI-4462㧕ߩ
⚂ ,80kHz ߹ ߢ ߩ ᝄ േ 㧔 ᦨ 㜞 ࠨ ࡦ ࡊ ࡦ ࠣ ᵄ ᢙ 204.8kHz㧕ࠍ⸘᷹น⢻ߣߥߞߡࠆ. Fig.3.7ߦController
ౝߩାภ࠳ࠗࠕࠣࡓࠍ␜ߔ.
Fig.3.7 Controllerౝߩାภ࠳ࠗࠕࠣࡓ
PSV࠰ࡈ࠻࠙ࠚࠕߩᯏ⢻
3D ࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߩᓮ߿⸳ቯߪၮᧄ⊛ߦోߡ PSV ࠰ࡈ࠻࠙ࠚࠕߢⴕ߁. ᓮ߿⸳ቯ㗄⋡ߦߟߡਅ⸥
ߦ␜ߔ.
(1) శቇ♽ߩ⸳ቯ
ࡂ࠼࠙ࠚࠕߩᓮ㧦ࠩࡆࡓߩ⟎
ࡈࠜࠞࠬ⺞ᢛON/OFF, ࡆ࠺ࠝࠞࡔߩ࠭
ࡓࡈࠜࠞࠬ⺞ᢛ
ࠗࡉࡆ࠺ࠝ↹ߩ↹⸳ቯ㧦ࠦࡦ࠻ࠬ࠻
ᐲᓀᐲߩ⸳ቯ
2D ࠕࠗࡔࡦ࠻ߩታⴕ㧦ࡑ࠙ࠬࠍ↪ߒߡࠗ
ࡉࡆ࠺ࠝ↹ߩ⸘᷹ὐࠍቯ⟵ߒߚࠅ, ࠩࡆ
ࡓࠍ⒖േߔࠆߚߩࠩ⟎ߩࠕࠗࡔࡦ
࠻
3D ࠕࠗࡔࡦ࠻ߩታⴕ㧦⸘᷹ὐߩᐳᮡߩၮḰߣ ߥࠆ, ේὐ߅ࠃ߮ᐳᮡゲࠍ⸳ቯ
(2) ⸘᷹ὐߩ⸳ቯ
⸘᷹ὐߪPCߦ␜ߐࠇߚࡆ࠺ࠝ↹ߢ⸳ቯࠍⴕ ߁. ߎߩߣ߈, 2⒳㘃ߩࡕ࠼㧔ࠬ࠲ࡦ࠳࠼ࡕ࠼
߅ࠃ߮ࡐࠗࡦ࠻ࡕ࠼㧕ߢ⸳ቯࠍⴕ߁ߎߣ߇ߢ߈ࠆ ߇, ⸳ቯਛߩࡕ࠼ߩ⒖ⴕߪ, ࠬ࠲ࡦ࠳࠼ࡕ࠼
߆ ࠄ ࡐ ࠗ ࡦ ࠻ ࡕ ࠼ ߳ ߩ ⒖ ⴕ ߩ ߺ ߇ น ⢻ ߢ ࠅ, ㅒߩ⒖ⴕߪߢ߈ߥ᭽ߢࠆ.
ࠬ࠲ࡦ࠳࠼ࡕ࠼ߢߩ⸘᷹ὐ⸳ቯ㧦✢, ⍱ᒻ, ᬦᒻ, ᄙⷺᒻߩฦ࿑ᒻߩឬ↹✬㓸, ࿑ᒻ߳ߩ
⸘᷹ὐߩ㈩⟎
ࡐࠗࡦ࠻ࡕ࠼ߢߩ⸘᷹ὐ⸳ቯ㧦ߩ⸘᷹ὐ⸳
ቯߣᓸ⺞ᢛ, ⸘᷹ὐ㑆ߩ✢ធ⛯ߩቯ⟵߅ࠃ߮✬㓸
ࠫࠝࡔ࠻ ࠬࠠࡖࡦߩታⴕ㧦ᚑߒߚ⸘᷹ὐߩ ᐳᮡࠍ⸘᷹ߒ, ᐳᮡ୯ࠍഀࠅᒰߡࠆ
ࡈࠜࠞࠬ୯ߩഀࠅᒰߡ㧦ฦ⸘᷹ὐ߳ߩࠩ
ߩࡈࠜࠞࠬ୯ߩഀࠅᒰߡ.
(3) ⸘᷹᧦ઙߩ⸳ቯ
⸘᷹࠺࠲ߩขࠅㄟߺ╬ߦ㑐ߔࠆ⸘᷹᧦ઙߩ⸳ቯ
ߦߪ, ਅ⸥ߩ⒳㘃߇ࠆ.
̒ General㧔৻⥸⸳ቯ㧕㧦᷹ቯࡕ࠼㧔FFT, Fast Scan, Time㧕, ࠕࡌࠫࡦࠣߩ⒳㘃㧔Off, Amplitude㧦
ෳ ᾖ ା ภ ߇ ή ႐ ว ߦ ᝄ ߩ ߺ ߩ ᐔ ဋ ൻ, Complex㧦ᝄߣ⋧ߩਔᣇࠍᐔဋൻ, Peak Hold㧦
ᦨᄢ୯, Time㧕, ࠕࡌࠫࡦࠣߩ࿁ᢙ, ⥄േౣ᷹
ቯߩON/OFF㧔ਅ⸥ߩSEߩ㗄⋡ࠍෳᾖ㧕, ਥᚑಽ
ಽᨆߦࠃࠆMIMO㧔Multi-Input Multi-Output㧕᷹ቯ ߩ⸳ቯࠍⴕ߁
̒ Channels㧔᷹ቯ࠴ࡖࡀ࡞ߩ⸳ቯ㧕㧦࠴ࡖࡦࡀ࡞ߩ
ല/ήല, ࡦࠫ, Coupling,⸘᷹ᣇะ,‛ℂ㊂,ᩞᱜ ୯,නߩ⸳ቯࠍⴕ߁
̒ Filter㧔ജାภߩ࠺ࠫ࠲࡞ࡈࠖ࡞࠲ߩ⸳ቯ㧕㧦ࡃ
ࡦ࠼㒢, ᓸಽ, Ⓧಽࡈࠖ࡞࠲ߥߤߩ⒳㘃ߣฦ ࡈࠖ࡞࠲ߩࡄࡔ࠲ߩ⸳ቯࠍⴕ߁
̒ Frequency㧔FFT ᷹ቯߢߩᵄᢙ⸳ቯ㧕㧦ࡃࡦ࠼,
ᵄᢙ▸࿐, FFTࠗࡦᢙߩ⸳ቯࠍⴕ߁
̒ Window㧔 ജ ା ภ ߩ ⓹ 㑐 ᢙ ߩ ⸳ ቯ 㧕㧦 ⓹ 㑐 ᢙ 㧔Rectangular, Hanning, Hamming, Blackman Harris, Bartlett, Flat Top, Exponential㧕ߩ⸳ቯࠍⴕ߁
̒ Trigger㧔࠻ࠟߩ⸳ቯ㧕㧦࠻ࠟߩኻ⽎ߣߔࠆ
࠴ࡖࡦࡀ࡞, ࠻ࠟ᧦ઙ㧔ାภߩ┙ߜ߇ࠅ/┙ߜ ਅ߇ࠅ, ߒ߈୯, ࡊ࠻ࠟ㧕ߩ⸳ቯࠍⴕ߁
̒ SE㧔ାภߩᒛ⸳ቯ㧕㧦ࠩߩ₸╬ߩ
㗴ߢᗵᐲ߇ૐਅߒߚߣ߈ߦ⥄േ⊛ߦࠕࡌࠫ
ࡦࠣߩ࿁ᢙࠍჇ߿ߒߡS/Nߩะࠍ࿑ࠆ⥄േౣ᷹
ቯߩ⸳ቯ. ߘߩ㓙, ࠩߩᾖ⟎ࠍዋߒߠ ߟߕࠄߒߡ㧔᷹ቯ〒㔌߇1 m ߩ႐วߢ⚂50ȝm㧕
⸘᷹ࠍⴕ߁ࠬࡍ࠶ࠢ࡞࠻࠶ࠠࡦࠣߩON/OFFߩ
⸳ቯ߽ࠆ.
̒ Vibrometer㧔Decoder ߩ⸳ቯ㧕:↪ߔࠆ Decoder ߩ⒳㘃߿ࡦࠫߩ⸳ቯࠍⴕ߁
̒ Generator㧔 ࡈ ࠔ ࡦ ࠢ ࠪ ࡚ ࡦ ࠫ ࠚ ࡀ ࠲ ߩ ⸳ ቯ㧕㧦ടᝄᵄᒻ㧔ᱜᒏᵄ, ⍱ᒻᵄ, ਃⷺᵄ, ࡦࡊ ᵄ, ࠬࠗࡊ, ᦼ࠴ࡖࡊ, ⇼ૃࡦ࠳ࡓ, ࡃ
ࠬ࠻࠴ࡖࡊ, ࡃࠬ࠻ࡦ࠳ࡓ, ࡙ࠩቯ
⟵㧕,ቯᏱ⁁ᘒߦߥࠆ߹ߢߩㆃᑧᤨ㑆ߩ⸳ቯ, ାภ ߩᝄߣࠝࡈ࠶࠻ߩ⸳ቯࠍⴕ߁.
̒ FastScan㧔FastScan᷹ቯࡕ࠼ߩ⸳ቯ㧕㧦ᤨ㑆㗔ၞ
ߩᦨዊੑਸ਼ᴺߩ࿁Ꮻ⸘▚ߦࠃࠅ, ฦᵄᢙߢ㜞ㅦ
ࠬࠠࡖࡦࠍⴕ߁ߚߩ⸳ቯ. ᵄᢙ߿ࡃࡦ࠼ࠍ
⸳ቯߔࠆ.
̒ Time㧔Time ᷹ቯࡕ࠼ߩ⸳ቯ㧕㧦Time ᷹ቯࡕ
࠼ߦ߅ߡ, ࠨࡦࡊࡦࠣᵄᢙߣࠨࡦࡊ࡞ᢙࠍ
⸳ቯߔࠆ. ᦨᄢ 64 ࡔࠟࠨࡦࡊ࡞㧔67,108,864 ࠨ ࡦࡊ࡞㧕߹ߢ⸳ቯน⢻.
(4) ⸘᷹ߩታⴕ
ࠪࡦࠣ࡞ࡐࠗࡦ࠻᷹ቯ㧔1 ὐߩߺߩ᷹ቯ㧕ߣࠬࠠࡖࡦ
᷹ቯ㧔ⶄᢙὐࠍㅪ⛯ߒߡ᷹ቯ㧕ߩ 2⒳㘃߇ࠆ. ࠬࠠࡖ ࡦ᷹ቯߩ႐วߪ, ࠬࠠࡖࡦߩㅴⴕ⁁ᴫࠍ↹㕙ߢ⏕ߢ ߈ࠆ.
(5) ࠺࠲ߩ␜
⸘᷹࠺࠲㧔Time, ࡄࡢࠬࡍࠢ࠻࡞, FRF (H1,H2), ࠦ ࡅࡦࠬ, PSD, ESD, Principal Inputs╬㧕ߩ␜߇น⢻
ߢࠆ. ߹ߚ FFT ࡕ࠼ߢ᷹ቯߒߚ࠺࠲ߦኻߒߡߪ,
ࠬࡍࠢ࠻ࡓߩ␜ߣ, ㆬᛯߒߚᵄᢙߦኻߔࠆታⒿ
ࠕ࠾ࡔ࡚ࠪࡦࠍ␜ߢ߈ࠆ. Timeࡕ࠼ߢ᷹ቯߒߚ࠺
࠲ߦኻߒߡߪ, ᤨ㑆㗔ၞߩታⒿࠕ࠾ࡔ࡚ࠪࡦߩ
␜߇น⢻ߢࠆ.
(6) ࠺࠲ߩࠛࠢࠬࡐ࠻
ࠬࡍࠢ࠻ࡓ߿ࠫࠝࡔ࠻╬ߩฦ⒳࠺࠲ߦߟߡ, ASCIIࡈࠔࠗ࡞ᒻᑼ, ME'Scopeࡈࠔࠗ࡞ᒻᑼ, UFF㧔࡙࠾
ࡃࠨ࡞ࡈࠔࠗ࡞㧕ᒻᑼߢࠛࠢࠬࡐ࠻น⢻ߢࠆ.
ࡦࠨ⟎ᓮࡠࡏ࠶࠻
ࡠࡏ࠶࠻ߩ᭴ᚑ
ࡦࠨ⟎ᓮࡠࡏ࠶࠻㧔KUKA␠KR-150-2㧕ߪ,6 ゲᄙ㑐▵ߩࡠࡏ࠶࠻ᧄ,ࡠࡏ࠶࠻ᓮⵝ⟎,࠹ࠖ࠴ࡍ ࡦ࠳ࡦ࠻ KCPߢ᭴ᚑߐࠇࠆ.ࡠࡏ࠶࠻ᓮⵝ⟎ߣ࠹ࠖ
࠴ࡍࡦ࠳ࡦ࠻KCPߩ౮⌀ࠍFig.3.8ߦ␜ߔ.࠹ࠖ࠴ࡍࡦ
࠳ࡦ࠻ߪࡠࡏ࠶࠻ߩ࠹ࠖ࠴ࡦࠣ߅ࠃ߮ࡊࡠࠣࡒࡦࠣ
ࠍⴕ߁ߚߩⵝ⟎ߢ,࠺ࠖࠬࡊࠗߣࠠࡏ࠼,ࠬࡍ
ࠬࡑ࠙ࠬ߇ࠊࠆ㧔Fig.3.9㧕.
Fig.3.8 ࡠࡏ࠶࠻ᓮⵝ⟎ߣ࠹ࠖ࠴ࡍࡦ࠳ࡦ࠻KCP
ࡠࡏ࠶࠻ߩ᭽
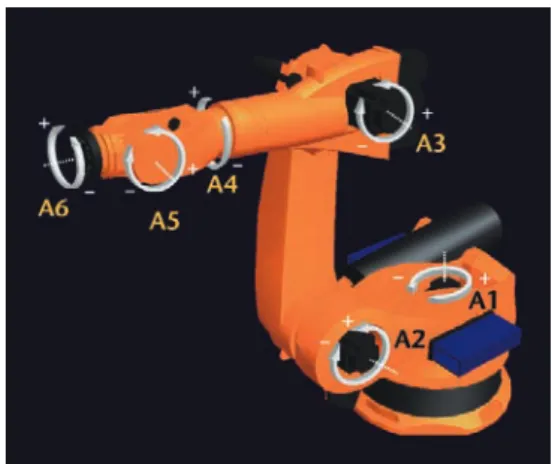
ࡠࡏ࠶࠻ߩ᭽ࠍ Table 3.23 ߦ␜ߔ. ࡠࡏ࠶࠻ోߩ นേ▸࿐ࠍ Fig.3.10 ߦ␜ߔ.߹ߚ,ࡠࡏ࠶࠻ߩฦゲߩ࿁ォ ᣇะࠍFig.3.11ߦ, ฦゲߩนേ▸࿐ߣㅦᐲࠍTable3.24ߦ
␜ߔ.
Fig.3.9 ࠹ࠖ࠴ࡍࡦ࠳ࡦ࠻KCP
Table 3.23 ࡠࡏ࠶࠻ߩ᭽
Type KR 150-2
Maximum reach 2,700 mm
Rated payload 150 kg
Suppl. Load, arm/link arm/rotating col.
50/100/300 kg Suppl. Load, arm + link arm,
max.
100 kg Maximum total load 550 kg
Number of axes 6
Mounting position Floor, ceiling
Variant Cleanroom, Foundry
Positioning repeatability ±0.06 mm
Controller KR C2 edition2005
Weight (excluding controller), approx.
1,245 kg Temperature during operation +10°C to + 55°C Protection classification IP 65
Robot footprint 1,006 mm × 1,006 mm
Connection 7.3 kVA
Noise level < 75 dB
Fig.3.10 ࡠࡏ࠶࠻ߩนേ▸࿐
Fig.3.11 ࡠࡏ࠶࠻ߩゲ
Table 3.24 ࡠࡏ࠶࠻ߩฦゲߩนേ▸࿐ߣㅦᐲ Axis data Range
(software)
Speed with rated payload 150kg Axis 1 (A1) ±185° 110°/s
Axis 2 (A2) 0°/㧙146° 110°/s Axis 3 (A3) +155°/㧙119° 100°/s Axis 4 (A4) ±350° 170°/s Axis 5 (A5) ±125° 170°/s Axis 6 (A6) ±350° 238°/s ࡠࡏ࠶࠻ߩᐳᮡ♽
ࡠࡏ࠶࠻േߩၮḰߣߥࠆᐳᮡ♽ߪᰴߩ4⒳㘃߇ࠅ,
↪ㅜߦᔕߓߡߘࠇߙࠇߩᐳᮡ♽ࠍㆡಾߦ⸳ቯߔࠆߎߣߢ, ࡠࡏ࠶࠻ࠍല₸⊛ߦᠲߢ߈ࠆ.
WORLDᐳᮡ♽㧦ࡠࡏ࠶࠻ߩ⿷వߦ࿕ቯߐࠇߚ࠺
ࠞ࡞࠻ᐳᮡ♽
ROBROOTᐳᮡ♽㧦࠺ࡈࠜ࡞࠻ߢߪWORLDᐳᮡ♽
ߣ৻⥌ߒߡࠆ. WORLD ᐳᮡ♽߆ࠄߩࠝࡈ࠶࠻
ࠍቯ⟵ߔࠆߎߣߢ, ROBROOTᐳᮡ♽ࠍ⸳ቯߔࠆ
BASEᐳᮡ♽㧦ኻ⽎‛ࠍၮḰߣߔࠆᐳᮡ♽
TOOLᐳᮡ♽㧦ࡠࡏ࠶࠻వ┵ߦขࠅઃߌࠆ࠷࡞
ࠍၮḰߣߔࠆᐳᮡ♽
ࡠࡏ࠶࠻ߩฦᐳᮡ♽ߩࠗࡔࠫࠍFig3.12ߦ␜ߔ.
Fig.3.12 ࡠࡏ࠶࠻ߩᐳᮡ♽
ࡠࡏ࠶࠻ߩᯏ⢻
ࡠࡏ࠶࠻ߪᚻേࡕ࠼㧔T1㧦ᚻേૐㅦࡕ࠼, T2㧦ᚻ
േ㜞ㅦࡕ࠼㧕ߣ⥄േࡕ࠼㧔AUT㧦⥄േࡕ࠼, AUT EXT㧦ᄖઃߌ⥄േࠪࠬ࠹ࡓࡕ࠼㧕ࠍ߃ߡࠆ. ᚻേ
ࡕ࠼ߢߪ, ࡠࡏ࠶࠻ߩᚻേᠲ, ࡊࡠࠣࡒࡦࠣ㧔࠹
ࠖ࠴ࡦࠣ㧕ࠍⴕ߁. ⥄േࡕ࠼ߢߪ, ࡊࡠࠣࡓߩ⥄
േㆇォࠍⴕ߁. ߥ߅ MaVES ߢߪ, 3D ࠬࠠࡖ࠾ࡦࠣᝄേ
⸘ߩ Scanning Headߩ⼔ߩߚߦࡠࡏ࠶࠻ߩᦨ㜞⒖േ
ㅦᐲࠍ250mm/sߦ㒢ߒߡࠆ㑐ଥߢ, T2ࡕ࠼ߪήല
ߣߒߡࠆ. AUT EXTࡕ࠼ߪ, ᄖઃߌࠪࠬ࠹ࡓߣหᦼ ࠍߣࠆ⥄േࡕ࠼ߢࠆ߇, MaVESߢߪ↪ߒߥ.
(1) ᚻേᠲ
࠹ࠖ࠴ࡍࡦ࠳ࡦ࠻ߩࠬࡍࠬࡑ࠙ࠬ߹ߚߪࠠࡏ
࠼ߦࠃࠅ, ࡠࡏ࠶࠻ࠍࠦࡦ࠻ࡠ࡞ߔࠆ.ᚻേᠲߪ, ฦ
ᐳᮡ♽㧔WORLDᐳᮡ♽/BASEᐳᮡ♽/TOOLᐳᮡ♽㧕ߩ
X, Y, Z, A(Zゲࠅߩ࿁ォ㧕, B㧔Yゲࠅߩ࿁ォ㧕, C㧔X ゲࠅߩ࿁ォ㧕ߩฦゲࠍࠦࡦ࠻ࡠ࡞ߔࠆ߆, ⋥ធࡠࡏ
࠶࠻ߩ㑐▵ゲࠍࠦࡦ࠻ࡠ࡞ߔࠆ߆ߩߕࠇ߆ߩᣇᴺߢ ⴕ߁.
(2) ࡊࡠࠣࡒࡦࠣ
ࡠࡏ࠶࠻ߩㆇേࠍ⥄േߢⴕ߁ߚߦ㜞⚖⸒⺆ KRL ࠍ
↪ߡࡊࡠࠣࡒࡦࠣࠍⴕ߁. ࡊࡠࠣࡒࡦࠣ߇น⢻ߥ ㆇേߪએਅߩߣ߅ࠅ.
PTPㆇേ㧔Point-to-Pointㆇേ㧕㧦৻⇟ᣧ⚻〝ߦᴪ ߞߡㆇേ
LINㆇേ㧔⋥✢ㆇേ㧕㧦⋥✢⚻〝ߦᴪߞߡㆇേ
CIRCㆇേ㧔ㆇേ㧕㧦ᜰቯߒߚߦᴪߞߡㆇേ
SPLINEㆇേ㧔ࠬࡊࠗࡦㆇേ㧕㧦ᜰቯߒߚὐࠍṖ
ࠄ߆ߦ⚿߱ࠃ߁ߦㆇേ
ߎ ߩ ߶ ߆, ᓮ 㧔LOOP, IF, SWITCH, WHILE,
REPEAT, FOR╬㧕߿㑐ᢙ㧔WAIT╬㧕ࠍ↪ߚࡊࡠࠣ
ࡒࡦࠣ߇น⢻ߢࠆ.
⛔ว࠰ࡈ࠻࠙ࠚࠕ
࠰ࡈ࠻࠙ࠚࠕߩᓎഀ
⛔ว࠰ࡈ࠻࠙ࠚࠕ㧔Polytec ␠ RoboVIB㧕ߪ,ࡦࠨ
⟎ᓮࡠࡏ࠶࠻ߩᓮ࠰ࡈ࠻࠙ࠚࠕߣ PSV ࠰ࡈ࠻
࠙ࠚࠕࠍࠦࡦ࠻ࡠ࡞ߒ,ࡠࡏ࠶࠻ߩേߣ⸘᷹ߩหᦼ ࠍ ⴕ ߁.⥄ േ ⸘ ᷹ ߩ ⷐ ߣ ߥ ࠆ ࠰ ࡈ ࠻ ࠙ ࠚ ࠕ ߢ ࠅ,Data Management SystemߩPCߦࠗࡦࠬ࠻࡞ߐࠇߡࠆ.
⛔ว࠰ࡈ࠻࠙ࠚࠕߩᯏ⢻
⛔ว࠰ࡈ࠻࠙ࠚࠕߪਥߦᰴߩᯏ⢻ࠍ߃ߡࠆ. (1) ࡠࡏ࠶࠻ߩ⟎ᐳᮡߩขᓧ
ࡠࡏ࠶࠻ߩ⟎ᐳᮡࠍขᓧߔࠆߎߣߢ,PSV ࠰ࡈ࠻࠙
ࠚࠕߦ߅ߡ⸘᷹ὐߩ⟎ᐳᮡࠍቯߔࠆߎߣ߇น⢻ߣ ߥࠆ.
(2) ࠹ࠖ࠴ࡦࠣߒߚࡠࡏ࠶࠻ߩ⟎ߦኻᔕߔࠆ⸘᷹
ὐߩഀࠅᒰߡ
࠹ࠖ࠴ࡦࠣᷣߺߩࡠࡏ࠶࠻⟎ߦኻߒ,♖ᐲ⦟ߊ⸘
᷹น⢻ߥ⸘᷹ὐࠍഀࠅᒰߡࠆ.⸘᷹น⢻߆ߤ߁߆ߩ್ቯ ߪ,ᦨᄢ⸘᷹〒㔌,ଏ⹜ߦኻߔࠆࠩߩⷺᐲ,⸘᷹ὐ ߇ଏ⹜⥄りߩ㒶ߦߥߞߡߥ߆╬ߩฦ⒳᧦ઙࠍၮߦ ⴕࠊࠇࠆ.⚿ᨐߣߒߡ⸘᷹ਇน⢻ߥὐ߇ή߆ߩ್߇ น⢻ߣߥࠆ.
(3) ࡠࡏ࠶࠻ߣ⸘᷹ߩหᦼ
ࡠࡏ࠶࠻ࡊࡠࠣࡓߣ PSV ࠰ࡈ࠻࠙ࠚࠕߦࠃࠆ⸘᷹
ࠍหᦼߐߖ,⥄േ⸘᷹ࠍน⢻ߦߔࠆ.
ᒛᯏ⢻
⛔ว࠰ࡈ࠻࠙ࠚࠕߦࠃࠆ⥄േ⸘᷹ਛߦᦨᄢ3⒳㘃߹ߢ ߩ࠺࠲ࠍ㧝ߟߩ␜࠙ࠖࡦ࠼࠙ౝߢหᤨ␜ߔࠆߚ
ߩ, OverlayTraces ᯏ⢻ࠍታⵝߒߡࠆ. ᄖㇱታⴕࡈࠔࠗ
࡞ߣߒߡᒛߐࠇߡ߅ࠅ, ታⴕߔࠆߣฦ⸘᷹࠴ࡖࡦࡀ࡞
ߩࡃ࠶ࡈࠔࠍ⺒ߺㄟߺ, ⸘᷹࠺࠲ࠍ࠙ࠖࡦ࠼࠙ߦ␜
߇น⢻ߣߥࠆ.
ࡕ࠳࡞⸃ᨆ࠰ࡈ࠻࠙ࠚࠕ
ࡕ࠳࡞⸃ᨆ࠰ࡈ࠻࠙ࠚࠕ㧔LMS ␠ Test.Lab㧕ߪ,
ࠫࠝࡔ࠻ߩᚑ,ᝄേ⸘᷹,ታⒿ⸃ᨆ,ࡕ࠼⸃ᨆ╬߇ น⢻ߥ࠰ࡈ࠻࠙ࠚࠕߢࠆ.ߎߩ࠰ࡈ࠻࠙ࠚࠕනߢ߽
↪น⢻ߢࠆ߇, MaVES ߦ߅ߡߪ,PSV ࠰ࡈ࠻࠙ࠚ ࠕߢᓧࠄࠇߚᝄേ․ᕈ࠺࠲㧔࡙࠾ࡃࠨ࡞ࡈࠔࠗ࡞ᒻ
ᑼ㧕ࠍTest.Labߦࠗࡦࡐ࠻ߒߡࡕ࠼⸃ᨆࠍⴕ߁ߣ
߁ᣇ߇ࡔࠗࡦߣߥࠆ.
࠰ࡈ࠻࠙ࠚࠕߩ᭴ᚑ
࠰ࡈ࠻࠙ࠚࠕߪਅ⸥ߦ␜ߔⶄᢙߩࡕࠫࡘ࡞߆ࠄ᭴ᚑ ߐࠇߡࠆ.
Test.Lab Desktop - Advanced
Test.Lab Frontend driver (8-channel)
Test.Lab Impact Testing
Test.Lab Spectral Testing
Test.Lab Geometry Workbook
Test.Lab Modal Analysis
Test.Lab Time Data Signal Calculator
Test.Lab Source Control
Test.Lab Time Recording add-in
Test.Lab PolyMAX
Test.Lab Automatic Modal Parameter Selection
Test.Lab Signature Throughput Processing
Test.Lab Operational Deflection Shapes & Time Animation Workbook
ࡕ࠳࡞⸃ᨆ࠰ࡈ࠻࠙ࠚࠕߩᯏ⢻
ࡕ࠳࡞⸃ᨆ࠰ࡈ࠻࠙ࠚࠕߪਅ⸥ߩᯏ⢻ࠍߔࠆ. (1) ࠫࠝࡔ࠻ߩᚑ
⸘᷹ὐߦ㑐ߔࠆ3 ᰴరᒻ⁁ࡕ࠺࡞ࠍᚑߢ߈ࠆ. ߎߎ ߢᚑߒߚࡕ࠺࡞ߪ⸘᷹⸃ᨆ࠺࠲ߦၮߠߡ 3Dࠕ
࠾ࡔ࡚ࠪࡦߦ↪ࠄࠇࠆ.
(2) ࠺࠲ߩ⸘᷹
⸘᷹࠴ࡖࡦ ࡀ࡞, ࡦࠨ, ࠻ࠟ᧦ઙ, ⓹㑐ᢙ, ടᝄାภ╬ߩ⸳ቯࠍⴕߞߚᓟߦ, ࡂࡦࡑࡦࠣ߹ߚߪࠪ
ࠚ ࠞ ട ᝄ ߢ ࠺ ࠲ 㧔Time, Octave, Spectrum, Autopower, Crosspower, FRF, Coherence㧕ࠍ⸘᷹ߔࠆ.
(3) ࡕ࠼⸃ᨆ
⸃ᨆᵄᢙ▸࿐ߩ⸳ቯ, ቯൻ࠳ࠗࠕࠣࡓ⸘▚, ࡐ
࡞ߩㆬᛯ㧔ᚻേㆬᛯ, ⥄േㆬᛯ㧕, ࠞࡉࡈࠖ࠶࠻ߦ ࠃࠆวᚑFRFߩ⸘▚, ࡕ࠼ࠪࠚࡊߩ⸘▚, MAC୯ߩ
⸘ ▚ ╬ ࠍ ⴕ ߁. ࠞ ࡉ ࡈ ࠖ ࠶ ࠻ ᚻ ᴺ ߪ, LSCE(Least Squares Complex Exponential time-domain) ߅ ࠃ ߮ PolyMAX(Least Squares Complex frequency-domain)ߩ2⒳ 㘃ࠍㆬᛯน⢻ߢࠆ. ࡕ࠼⸃ᨆ⚿ᨐߦ㑐ߒ, ࡕ࠼ࠪ
ࠚࡊߩࠕ࠾ࡔ࡚ࠪࡦ␜߿วᚑFRFߩ␜߇น⢻.
(4) ታⒿ⸃ᨆ
ቯᏱ⸃ᨆ߅ࠃ߮࠻࠶ࠠࡦࠣ⸃ᨆࠍⴕ߁. ⸃ᨆ⚿ᨐߦ ߟߡ, ᵄᢙゲ/ᤨ㑆ゲߩታⒿࠕ࠾ࡔ࡚ࠪࡦࠍ
␜น⢻.
ߘߩઁ
ోࡈࠚࡦࠬ
ࠪࠬ࠹ࡓߩ࿐ߦߪోࡈࠚࡦࠬ߇⸳⟎ߐࠇߡࠆ. ࡈࠚࡦࠬߦߪ2▎ᚲߦᚺ㧔৻ߟߪࠬࠗ࠼ᑼ,৻ߟߪⷰ㖸 㐿߈ᑼ㧕߇ࠅ,⥄േ⸘᷹ਛߦᚺࠍ㐿ߌࠆߣ,ࡠࡏ࠶࠻߇
⥄േᱛߔࠆᯏ᭴ࠍ߃ߡࠆ.ోࡈࠚࡦࠬߩਃ㕙࿑
ࠍFig3.13ߦ␜ߔ.
Fig.3.13 ోࡈࠚࡦࠬߩਃ㕙࿑
Scanning Headขࠅઃߌᴦౕ
3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߩScanning Headߪ, ขࠅઃߌ ᴦౕࠍߒߡࡠࡏ࠶࠻ࠕࡓߩవ┵ߦขࠅઃߌࠄࠇߡ
ࠆ(Fig.3.14). ข ࠅ ઃ ߌ ᴦ ౕ ߦ ߟ ߡ Fig.3.15 ߅ ࠃ ߮ Fig.3.16ߦ␜ߔ.
Fig.3.14 ࡠࡏ࠶࠻ߣScanning Head Fig.3.15 Scanning Head ขࠅઃߌᴦౕ
Fig.3.16 ขࠅઃߌᴦౕߩਃ㕙࿑
Fig.3.17 ࡠࡏ࠶࠻᨞บߩਃ㕙࿑
ࡠࡏ࠶࠻᨞บ
ࡠࡏ࠶࠻ߪኾ↪ߩ᨞บ㧔Fig.3.17㧕ߦ⸳⟎ߐࠇ, ᨞บࠍ ᐥߦ 4ᧄߩࠕࡦࠞࡏ࡞࠻ߢ࿕ቯߐࠇࠆ. ߎߩࠕࡦࠞ
ࡏ࡞࠻ࠍᄖߔߣ, ࡄ࠶࠻࠻࠶ࠞߦࠃࠅࡠࡏ࠶࠻ࠍ᨞
บߏߣ⒖േߢ߈ࠆ.
PCߣࡀ࠶࠻ࡢࠢ
MaVESߢߪ, એਅߩ 3บߩPC߇↪ߐࠇߡ߅ࠅ, ࡠ
ࠞ ࡞ ࡀ ࠶ ࠻ ࡢ ࠢ ߢ ធ ⛯ ߐ ࠇ ߡ ࠆ. ߕ ࠇ ߽
Microsoft Windows XP߇ࠗࡦࠬ࠻࡞ߐࠇ, ࡢࠢࠣ࡞
ࡊฬߪMAVES-NETߢࠆ.
3D ࠬࠠࡖ࠾ࡦࠣᝄേ⸘↪ PC 㧔ࠦࡦࡇࡘ࠲ฬ㧦 PSV400, IP:192.168.100.1㧕
ࡦࠨ⟎ᓮࡠࡏ࠶࠻↪PC㧔ࠦࡦࡇࡘ࠲ฬ㧦 KR150, IP:192.168.100.11㧕
ࡕ࠳࡞⸃ᨆ࠰ࡈ࠻࠙ࠚࠕ↪PC㧔ࠦࡦࡇࡘ࠲ฬ㧦 MAVES, IP:192.168.100.2㧕
⸘᷹ᣇᴺ
⥄േ⸘᷹ࠍⴕ߁ߚߦߊߟ߆ߩḰ߿⸳ቯࠍⴕ߁ᔅ ⷐ߇ࠆ.ᧄ┨ߢߪ,⸘᷹Ḱ߆ࠄ⸘᷹⚿ᨐߩಣℂ߹ߢߩ
৻ㅪߩᚻ㗅ߦߟߡ␜ߔ.
⸘᷹ߩᵹࠇ
⥄േ⸘᷹ߩవ┙ߜ, PSV࠰ࡈ࠻࠙ࠚࠕ, RoboVib࠰ࡈ࠻
࠙ࠚࠕ, ࡠࡏ࠶࠻ߦኻߒߘࠇߙࠇ⸳ቯ╬ߩᠲࠍⴕ߁ᔅ ⷐ߇ࠆ. ⸘᷹ߩࡢࠢࡈࡠࠍFig.4.1ߦ␜ߔ.
Fig.4.1 ⸘᷹ࡢࠢࡈࡠ
⸘᷹Ḱ
ଏ⹜ߣ⸘᷹ᯏེߩ⸳⟎
ଏ⹜߅ࠃ߮⸘᷹ᯏེࠍ⸳⟎ߔࠆ.ଏ⹜ߩ⸳⟎ߦ
ߚߞߡߪ, ࡠࡏ࠶࠻ߩนേ▸࿐ࠍ⠨ᘦߒߡⴕ߁.
MaVESߩേ
ࡠࡏ࠶࠻ߩേ㧦ࡠࡏ࠶࠻ᓮⵝ⟎ߩ㔚ḮࠍON ߦߔࠆߣ, ೨࿁⚳ੌᤨߩ⁁ᘒߦᓳᏫߔࠆ.
3Dࠬࠠࡖ࠾ࡦࠣᝄേ⸘ߩേ㧦LEFT߅ࠃ߮
RIGHTߩControllerߩ㔚ḮࠍONߦߒ㧔3D⸘᷹ࠍⴕ ߁႐ว. 1Dߩ႐วߪߎߩᚻ㗅ߪਇⷐ㧕, ᰴߦ Junction Box㧔TOPߩControllerߣ৻㧕ߩ㔚Ḯࠍ ONߦߔࠆ. ᦨᓟߦPCߩ㔚ḮࠍONߦߔࠆ. ߎࠇࠄ ࠍONߦߔࠆߣ, WIndowsߢ, PSV࠰ࡈ࠻࠙ࠚࠕ
߅ࠃ߮RoboVib࠰ࡈ࠻࠙ࠚࠕࠍേߢ߈ࠆࠃ߁ߦ
ߥࠆ.
శቇ♽ߩ⸳ቯ
శቇ♽ߩ⸳ቯߦߪ, Preferenceߩ⸳ቯ, 2Dࠕࠗࡔࡦ
࠻ߩ⸳ቯ, 3Dࠕࠗࡔࡦ࠻ߩ⸳ቯ, Baseᐳᮡ♽ߩࠠࡖ
ࡉ࡚ࠪࡦ߇ࠆ. MaVESߢߪ, 3บߩࠩࡦ ࠨߩవ┵ㇱࠍ⚿߱ਃⷺᒻߩ㊀ᔃ⟎߆ࠄု⋥ߦ
700mm㔌ࠇߚ⟎ߦଏ⹜߇ࠆߎߣࠍᗐቯߒߚࠕ
ࠗࡔࡦ࠻࠺࠲߇↪ᗧߐࠇߡࠆ. ଏ⹜ߣࡦࠨߩ
⋧ኻ⟎ࠍ߈ߜࠎߣ⸳ቯߔࠆߎߣߢ, 2Dࠕࠗࡔࡦ࠻߅ ࠃ߮3Dࠕࠗࡔࡦ࠻ߩ⸳ቯߪਇⷐߣߥࠆ. Baseᐳᮡ♽
ߩࠠࡖࡉ࡚ࠪࡦߦߟߡ߽ㅢᏱߪਇⷐߢࠆ.
PSVߩPreference⸳ቯ
PSV ࠰ ࡈ ࠻ ࠙ ࠚ ࠕ ߢ Preference ߩ ⸳ ቯ ࠍ ⴕ ߁ 㧔Setup>Preference㧕. Preference ߩ ⸳ ቯ ࠙ ࠖ ࡦ ࠼ ࠙ ࠍ Fig.4.2ߦ␜ߔ. ߎߩ߁ߜDevices࠲ࡉߢߪ, Scanning Head ࠍบ↪ߔࠆ߆ࠍਅ⸥ߩࠃ߁ߦ⸳ቯߔࠆ.
PSV-E-401-3D㧦3บ㧔TOP, RIGHT, LEFT㧕ࠍ↪
PSV-E-401-3D(1D)㧦3บࠍേߔࠆ߇TOPߩߺࠍ
↪
PSV-E-401-1D㧦TOPߩߺࠍ↪
߹ߚ, Channels࠲ࡉߢߪ, ᝄേ⸘ߩᓮߦ↪ߔࠆ࠴ࡖ
ࡀ࡞ࠍ⸳ቯߔࠆ. Scanning Head࠲ࡉߢߪ,Scanning Head ߦኻߔࠆ⚦ߥ⸳ቯࠍⴕ߁. ․ߦHead Angleߩ⸳ቯߦߟ
ߡߪ, MaVESߢߪ3บߩScanning Headߩขࠅઃߌ߇
࿕ቯߐࠇߡⷺᐲ߇߹ߞߡ߅ࠅ, Top:0°, Left:270°, Right:90°ߣߒߡ⸳ቯߔࠆ. Geometry࠲ࡉߢߪ, Hidden
Pointsߩផᅑ୯ߩ⸘▚߿ὶὐ୯ߩ⥄േ⸘▚ߩ⸳ቯࠍⴕ߁.
dB Reference࠲ࡉߢߪdBߩၮḰࠍ⸳ቯߔࠆ. Messages࠲ ࡉߢߪ␜ߔࠆࠪࠬ࠹ࡓࡔ࠶ࠫߩ⸳ቯࠍⴕ߁.
2Dࠕࠗࡔࡦ࠻ߩ⸳ቯ
ࡆ࠺ࠝ↹ߩࠩߩ⟎ࠍ,ታ㓙ߩ᷹ቯ㕙ߦ
ࠆ ࠩ ߩ ⟎ ߣ ว ߁ ࠃ ߁ ߦ ࠕ ࠗ ࡔ ࡦ ࠻ ࠍ ⴕ ߁ 㧔Setup>2D alignment㧕.ଏ⹜ࠍᤋߒߒߡࠆࡆ࠺ࠝ
↹㧔Fig.4.3㧕ߢ,ଏ⹜ߩછᗧߩ⟎ߦࠩࠍࡑ
࠙ࠬߩਛࡏ࠲ࡦߢ⒖േߐߖ,ࠩ߇ᾖߐࠇߡࠆ ὐࠍࡑ࠙ࠬߢᜰቯߔࠆ.ߎࠇࠍTOP, LEFT, RIGHTߩฦ
ࠩߦߟ߈,ߘࠇߙࠇ6ὐએᜰቯߔࠆߎߣߢ,2Dࠕ
ࠗࡔࡦ࠻ࠍⴕ߁.ታⴕᓟߪ,ࡆ࠺ࠝ↹ߢࡑ࠙ࠬࠢ࠶
ࠢߒߚὐߦ 3 ߟߩࠩ߇ᾖߐࠇࠆࠃ߁ߦߥࠆ.ࡠ ࡏ࠶࠻ࠍ߁႐วߪ, RoboVib ࠰ࡈ࠻࠙ࠚࠕߢ⸳ቯᷣߩ ࠕࠗࡔࡦ࠻࠺࠲ࠍ↪ߔࠆߚ, ߎߩ㗄⋡ߦ␜ߔᚻ
േߢߩ⸳ቯߪਇⷐߢࠆ.
Devices࠲ࡉ
Channels࠲ࡉ
Scanning Head࠲ࡉ
Geometry࠲ࡉ
dB Reference࠲ࡉ
Messages࠲ࡉ Fig.4.2 PSVߩPreference࠙ࠖࡦ࠼࠙
Fig.4.3 2Dࠕࠗࡔࡦ࠻ߩ↹㕙
3Dࠕࠗࡔࡦ࠻ߩ⸳ቯ
᷹ ቯ 㗔 ၞ ߩ ᐳ ᮡ ♽ ߩ ⸳ ቯ ࠍ ᚻ േ ߢ ⴕ ߁ 㧔Setup>3D alignment㧕.ታ㓙ߩଏ⹜ߢ,3ߟߩࠩࠍ1ὐߦ৻
⥌ߐߖߥ߇ࠄ,ේὐ,X ゲߩὐ,Y ゲᣇะߩᱜߩὐ╬ࠍᜰቯ ߒߡ,ᐳᮡ♽ࠍቯߔࠆ㧔Fig.4.4㧕. ࡠࡏ࠶࠻ࠍ߁႐ว
ߪ, RoboVib ࠰ࡈ࠻࠙ࠚࠕߢ⸳ቯᷣߩࠕࠗࡔࡦ࠻࠺
࠲ࠍ↪ߔࠆߚ, ߎߩ㗄⋡ߦ␜ߔᚻേߢߩ⸳ቯߪਇⷐ ߢࠆ.
Fig.4.4 3Dࠕࠗࡔࡦ࠻ߩ↹㕙
Baseᐳᮡ♽ߩࠠࡖࡉ࡚ࠪࡦ
Baseᐳᮡ♽ߩࠠࡖࡉ࡚ࠪࡦߪ,ࡠࡏ࠶࠻ߩBase ᐳᮡ♽ࠍ⸳ቯߔࠆߚߦⴕ߁. Baseᐳᮡ♽ࠠࡖࡉ
࡚ࠪࡦߩࡢࠢࡈࡠࠍFig.4.5ߦ␜ߔ. Baseᐳᮡ♽ߩ
ࠠࡖࡉ࡚ࠪࡦߪ,ᣢߦ㧔Baseᐳᮡ♽ߦၮߠߚ㧕⸘
᷹ὐ߇⸳ቯߐࠇߚଏ⹜ࠍ, ࡠࡏ࠶࠻ߦኻߒ⋧ኻ⒖േߐ ߖߚ႐วߦᄢ߈ߥὐ߇ࠆ.ߎࠇߪ, Baseᐳᮡ♽ࠍࠠࡖ
ࡉ࡚ࠪࡦߦࠃࠅቯ⟵ߒ⋥ߔߛߌߢㆊߩ⸘᷹ὐߩ
⸳ቯࠍᵴ↪ߢ߈ࠆߚߢࠆ.
ㆊߩ⸘᷹ὐߩ⸳ቯࠍౣ↪ߔࠆ႐วࠍ㒰ߌ߫,ᧄ㗄 ߦ␜ߔBaseᐳᮡ♽ߩࠠࡖࡉ࡚ࠪࡦߪਇⷐߢࠆ.
(1) ࠠࡖࡉ࡚ࠪࡦࡐࠗࡦ࠻ߩ⸳ቯ
ଏ⹜ߦ,4ὐߩࠠࡖࡉ࡚ࠪࡦࡐࠗࡦ࠻ࠍ
⸳ቯߔࠆ.ߎߩߣ߈4ὐ߇ห৻⋥✢ߦਗ߫ߥࠃ ߁ߦߔࠆ
ฦࠠࡖࡉ࡚ࠪࡦࡐࠗࡦ࠻ߩᐳᮡ୯ࠍࠆ
(2) ࠩࠍේὐ߳⒖േ
PSV࠰ࡈ࠻࠙ࠚࠕߢ,acquisition modeߩ3D Alignmentߦࠆ
Select and Check Pointࠍታⴕߔࠆߔࠆ
ࠬ࠻ਛߩᦨೋߩalignment pointࠍࠢ࠶ࠢߒ,
ࠩࠍේὐ߳⒖േߔࠆ
(3) ࡠࡏ࠶࠻ࡊࡠࠣࡓߩᚑ
ࡠࡏ࠶࠻ࡊࡠࠣࡓࠍᣂⷙߦ㐿ߊ㧔Fig.4.6㧕. ߥ ߅࠹ࠖ࠴ࡦࠣᤨߦ, ࡊࡠࠣࡓߪోߡ
START_PSV_MOVEMENTSߩⴕߣPTP HOMEߩ ⴕߩ㑆ߦ⸥ㅀߔࠆ.
3ߟߩࠩ߇1ὐ⋡ߩࠠࡖࡉ࡚ࠪࡦࡐࠗ
ࡦ࠻ߦᒰߚࠆࠃ߁ߦ,ࡠࡏ࠶࠻ࠍ⒖േߐߖ,ࡠࡏ࠶
࠻⟎ࠍ࠹ࠖ࠴ࡦࠣߔࠆ. ߘߩ㓙,േᣇᴺߪ PTP (Point-to-Point) േߣߔࠆ. ࡊࡠࠣࡓߢ ࡐ࠶ࡊࠕ࠶ࡊߔࠆPTPࠗࡦࠗࡦࡈࠜࡓߦ߅
ߡ,2ࠞࡓ⋡ߦ⸳ቯߔࠆࡠࡏ࠶࠻⟎ߩฬ⒓ߪB1 ߣߔࠆ.3ࠞࡓ⋡ߪⓨ⊕ߣߒ,4ࠞࡓ⋡߅ࠃ߮5
ࠞࡓ⋡ߪ࠺ࡈࠜ࡞࠻ߩ߹߹ߣߔࠆ㧔Fig.4.7㧕
ᱷࠅ3ὐߩࠠࡖࡉ࡚ࠪࡦࡐࠗࡦ࠻ߦኻߒ,ࠗ ࡦࠗࡦࡈࠜࡓߩ2ࠞࡓ⋡ߩฬ⒓ࠍߘࠇߙࠇ B2, B3, B4ߣߒߡ,࠹ࠖ࠴ࡦࠣࠍ➅ࠅߔ.
ࡠࡏ࠶࠻ࡊࡠࠣࡓࠍሽߔࠆ
(4) Baseࠠࡖࡉ࡚ࠪࡦߩታⴕ
RoboVib࠰ࡈ࠻࠙ࠚࠕߩPreferencesߢ,࠹ࠖ࠴ࡦ
ࠣᷣߺߩࡠࡏ࠶࠻ࡊࡠࠣࡓߩࡊࡠࠣࡓࡄࠬࠍ
ജߔࠆ
Setup > Base Calibrationࠍㆬᛯߒ, Base Calibration
࠙ࠖࡦ࠼࠙ࠍ㐿ߊ㧔Fig.4.8㧕.
4ὐߩࠠࡖࡉ࡚ࠪࡦࡐࠗࡦ࠻ߩᐳᮡࠍജ
ߔࠆ.Base ᐳᮡ♽߇⸘▚ߐࠇ,ࡠࡏ࠶࠻ࠦࡦ࠻ࡠ
ߦォㅍߐࠇࠆ.ߎࠇߦࠃࠅ,ࡠࡏ࠶࠻ߩBaseᐳ
ᮡ♽ߢࠆBASE[1]߇ᦝᣂߐࠇࠆ.
Fig.4.5 Base Calibrationߩࡢࠢࡈࡠ
Fig.4.6 ࡠࡏ࠶࠻ࡊࡠࠣࡓ
Fig.4.7 PTPࠗࡦࠗࡦࡈࠜࡓ
Fig.4.8 Base Calibration࠙ࠖࡦ࠼࠙
ࡠࡏ࠶࠻⟎ߩ࠹ࠖ࠴ࡦࠣ
⥄േ⸘᷹ߦ߅ߡࡠࡏ࠶࠻ࠍേ߆ߔ႐วߦ,੍ࡠࡏ
࠶࠻⟎ࠍ࠹ࠖ࠴ࡦࠣߒߡࡠࡏ࠶࠻ࡊࡠࠣࡓࠍᚑ ߔࠆᔅⷐ߇ࠆ.ࡠࡏ࠶࠻⟎ߦߟߡߪ, 3 บߩࠩ
ࡦࠨߩవ┵ㇱࠍ⚿߱ਃⷺᒻߩ㊀ᔃ⟎߆ࠄု⋥ߦ
700mm 㔌ࠇߚ⟎ߦଏ⹜߇ࠆࠃ߁ߦ⸳ቯߔࠆ㧔S/N
Ყߣࠬࠠࡖ࠾ࡦࠣߩ▸࿐ߩࡃࡦࠬ߆ࠄ 700mm ࠍၮḰ ߦ3Dࠕࠗࡔࡦ࠻࠺࠲߇⸳ቯߐࠇߡࠆ㧕. ࠩ
ࡦࠨߣଏ⹜ߩ⟎㑐ଥࠍFig.4.9ߦ␜ߔ.
Fig.4.9 ࡦࠨߣଏ⹜ߩ⟎㑐ଥ (1) ࡠࡏ࠶࠻ࡊࡠࠣࡓߩᣂⷙᚑ
࠹ࠖ࠴ࡍࡦ࠳ࡦ࠻ߢ,ࡠࡏ࠶࠻ࡊࡠࠣࡓࠍᣂⷙ
ᚑߔࠆ㧔Fig.4.6ࠍෳᾖ㧕.ߥ߅࠹ࠖ࠴ࡦࠣᤨߦ, ࡊࡠࠣ
ࡓ ߪ ో ߡ START_PSV_MOVEMENTS ߩ ⴕ ߣ PTP HOME ߩⴕߩ㑆ߦ⸥ㅀߔࠆ. ߥ߅, ߊߟ߆ߩࠨࡉࡊ ࡠࠣࡓߦಽഀߒ, ࡔࠗࡦߩࡊࡠࠣࡓ߆ࠄࠨࡉࡊࡠࠣ
ࡓࠍ߮ߔࡊࡠࠣࡒࡦ߽ࠣน⢻ߢࠆ.
(2) ࡠࡏ࠶࠻⟎ߩ࠹ࠖ࠴ࡦࠣ
࠹ࠖ࠴ࡍࡦ࠳ࡦ࠻ߦࠃࠅࡠࡏ࠶࠻⟎ࠍ࠹ࠖ࠴ࡦ
ࠣߔࠆ.ߘߩ㓙,േᣇᴺߪ PTP (Point-to-Point) േߣ ߒ,PTPࠗࡦࠗࡦࡈࠜࡓߦ߅ߡ,2ࠞࡓ⋡ߦ⸳ቯߔ ࠆࡠࡏ࠶࠻⟎ߩฬ⒓ߪ,㗅⇟ߦ M1, M2ߣߔࠆ.3
ࠞࡓ⋡ߪⓨ⊕ߣߒ,4ࠞࡓ⋡ߩToolᐳᮡ♽ࠍTool [1]
ߣߒ,5ࠞࡓ⋡ߩBaseᐳᮡ♽ࠍBase[0]ߣߔࠆ.ߥ߅,ࡠࡏ
࠶࠻ߣଏ⹜ߩⴣ⓭ࠍ㒐ᱛߔࠆߎߣࠍ⋡⊛ߣߒߡ,⸘᷹
ࠍⴕࠊߥ࠳ࡒߩࡠࡏ࠶࠻⟎ࠍ⸳ቯߔࠆ႐ว߇ࠆ. ߎߩ႐ว߽ PTP േߣߔࠆ߇,ࠗࡦࠗࡦࡈࠜࡓߦ߅
ߡࡠࡏ࠶࠻⟎ߩฬ⒓ߪP1, P2ߣߒ,ߐࠄߦ3ࠞ
ࡓ⋡ߦCONTࠍᜰቯߔࠆ㧔⋡ᮡὐߢᱛ߹ࠄߥߎߣߩ ᜰቯ㧕.ᐳᮡ♽ߪ೨ㅀߩ߽ߩߣห᭽,Toolᐳᮡ♽ࠍTool [1]
ߣߒ,Baseᐳᮡ♽ࠍBase[0]ߣߔࠆ.
ߥ߅ࠩࠍታ㓙ߦࠬࠠࡖࡦߐߖߡ⸘᷹น⢻ߥ▸࿐
ߩ⋡ࠍ⏕ߒߥ߇ࠄ,ࡠࡏ࠶࠻⟎ࠍ࠹ࠖ࠴ࡦࠣߔ ࠆߎߣ߇น⢻ߢࠆ.ߎࠇߪ PSV ࠰ࡈ࠻࠙ࠚࠕߩࡑࠢࡠ ࡊࡠࠣࡓ"ShowScanRangeAndZeroPos"
㧔Examples¥Macros¥ShowScanRanges.bas㧕ࠍታⴕߔࠆߎ ߣߦࠃࠅⴕ߁. ታⴕਛߪᏱߦࠩ߇ࠬࠠࡖࡦߐࠇ,
ࠩߩᾖ▸࿐߇⏕ߢ߈ࠆ⁁ᘒߣߥࠆ.
(3) ࡠࡏ࠶࠻ࡊࡠࠣࡓࠍሽߔࠆ.