室蘭工業大学航空宇宙機システム研究センター年次 報告書 2006 全1冊
その他(別言語等)
のタイトル
Muroran Institute of Technology Aerospace Plane Research Center Annual Report 2006
雑誌名 室蘭工業大学航空宇宙機システム研究センター年次
報告書
巻 2006
発行年 2007‑05
URL http://hdl.handle.net/10258/00008853
Muroran Institute of Technology Aerospace Plane Research Center
Annual Report 2006
࠰ഏإԓᾁᾅ
䋲䋰䋰䋷ᐕ䋵
ᇌٻܖඥʴᴾ ܴᖅಅٻܖᴾ
ᑋᆰܢܬೞἉἋἘἲᄂᆮἍὅἑὊᴾ
Ꮞ㗡⸒㩷
⹜㛎䉟䊮䊐䊤䈱ᢛㅴ䉃㩷
䉶䊮䉺䊷㐳㩷 ᰴ㩷 ਗ਼ᒄ㩷 㩷 㩷 㩷 㩷 ᐔᚑ䋱䋸ᐕ䋳䋲䋲ᣣ䈪䋬⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥ䉶䊮䉺䊷䈏⸳⟎䈘䉏䈩ਣ䋲ᐕ䈏⚻ㆊ䈚䉁䈚䈢䋮 ᧄ⎇ⓥ䉶䊮䉺䊷䈪䈲䋬䇸ᄢ᳇䉕↪䈚䈩㜞ㅦ䊶㜞䇱ᐲ䉁䈪㘧ⴕ䈜䉎䈢䉄䈱㕟ᣂ⊛䈭ၮ⋚ᛛⴚ䉕⎇ⓥ
㐿⊒䈚䋬㑆ャㅍ䈍䉋䈶゠䈻䈱ᓔㆶャㅍ䉲䉴䊁䊛䈱㕟ᣂ䈮⾗䈜䉎䇹䈖䈫䉕ਥ䈢䉎⎇ⓥ⋡
ᮡ䈮ឝ䈕䈩⌕ታ䈮⎇ⓥ䉕ㅴ䉄䈩䈇䉁䈜䋮․䈮䋬䈖䈱䋲ᐕ㑆䈲䋬⎇ⓥ䉕ㅴ䉄䉎䈪㊀ⷐ䈭⹜㛎⸳䈱 ᢛ䉕ㅴ䉄䈩䈐䉁䈚䈢䋮ᦨ䉅ᄢဳ䈱⹜㛎⸳䈲ๆ䈇ㄟ䉂ᑼ㖸ㅦ㘑ᵢ䈪䈅䉍䋬ᐔᚑ䋱䋷ᐕᐲᧃ䈮ၮ ᧄ⊛䈭ㇱಽ䉕ᑪ⸳䈚䋬䋱䋸ᐕᐲ䈮䈲᳇ᵹ䈱⾰䈱ᡷༀᎿ䈫⌀ⓨ䉺䊮䉪䈱Ⴧ⸳䈮䉋䉎ㅢ㘑ᤨ㑆䈱ᑧ 㐳䉕࿑䉍䉁䈚䈢䋮᳇ᵹ䈱⾰䈱ᡷༀᎿ䈮䉋䈦䈩䋬䊙䉾䊊䋲䋬䋳䋬䋴䈱䊉䉵䊦䈮䉋䉎᳇ᵹ䈲ᭂ䉄䈩⦟ᅢ䈭
⚿ᨐ䉕ᓧ䉎䈖䈫䈏䈪䈐䋬㘧⠍䈱ⓨജ․ᕈ䊂䊷䉺䉕ขᓧ䈜䉎⹜㛎䈮ଏ䈞䉎䈖䈫䈮䈭䉍䉁䈚䈢䋮ᓟ䋬 䉣䉝䊋䉾䉪䉇⌀ⓨ䉺䊮䉪䈱Ⴧ⸳䋬ജ䈱⸘᷹䈮↪䈇䉎ᄤ⒊╬䉕ᢛ䈜䉎䈖䈫䈮䉋䈦䈩࿖ౝᢙ䈱㖸 ㅦ㘑ᵢ䈫䈚䈩ㆇ↪䈪䈐䉎䈖䈫䉕⋡ᜰ䈚䉁䈜䋮䋱䋷ᐕᐲ䈮䈲㘑ᵢ䉕↪䈇䈢⹜㛎䊂䊷䉺䉕ቢ䈜䉎䈢䉄䈮 ᢙ୯ᵹ⸘▚↪䈱ਗ䉮䊮䊏䊠䊷䉺䊷䉕ዉ䈚䉁䈚䈢䋮䉁䈢䋬ዊဳ䈱ᮨဳⷙᮨ䈱䉳䉢䉾䊃䉣䊮䉳䊮䉕
⹜㛎䈜䉎䊁䉴䊃䉶䊦䉕⸳⟎䈚䉁䈚䈢䋮䋱䋸ᐕᐲ䈮䈲䋬㘧ⴕᕈ⢻䉇㘧ⴕቯ䉕ᬌ⸽䈜䉎䈢䉄䈱䊐䊤䉟䊃 䉲䊚䊠䊧䊷䉺ⵝ⟎䉕ዉ䈚䋬㘧ⴕᓮ䉲䉴䊁䊛䈱⎇ⓥ䉇⸒⪲䈪䈚㔍䈇⥶ⓨᯏ䈱㘧ⴕ䊜䉦䊆䉵䊛䉕 ቇ↢䈮㛎䈘䈞䉎ታ⠌ᬺ䈮↪䈇䈩䈇䉁䈜䋮䈖䈱ઁ䈱ᄢဳ⹜㛎⸳䈫䈚䈩䈲䋬㜞ㅦⴕ゠⹜㛎
⸳䈫ផㅴ䉣䊮䉳䊮䋨ዊဳ䉳䉢䉾䊃䉣䊮䉳䊮䈍䉋䈶ዊဳ䊨䉬䉾䊃䉣䊮䉳䊮䋩䈱Ά⹜㛎⸳䉕⸘↹䈚䈩 䈇䉁䈜䈏䋬䈖䉏䉌䈮䈧䈇䈩䉅ၮ␆⊛䈭⹜㛎䉇⺞ᩏ䉕ⴕ䈇䉁䈚䈢䋮䈖䉏䉌䈱⹜㛎⸳䈮䈧䈇䈩䈲䋬ቇ
ౝ䈱ᢝ䈮⸳⟎䈜䉎䈖䈫䈏䈪䈐䈭䈇䈖䈫䈎䉌䋬ర䉇ౝ䈱ⴕᯏ㑐䈱䈗දജ䉕ᓧ䈭䈏䉌ㅴ䉄䈩 䈇䉁䈜䋮㩷
⎇ⓥ㐿⊒䈪䈲䋬ᯏ䈱ⓨജ․ᕈ䉇᭴ㅧ⸃ᨆ䈮㑐䈜䉎⎇ⓥ䈏ㅴ䉖䈪䈍䉍䋬䈖䉏䉌䈱⚿ᨐ䈮ၮ䈨䈇 䈩䋬⎇ⓥ䉶䊮䉺䊷䈏⋡ᜰ䈜ᯏ㐳䋳䌭⒟ᐲ䈱㘧⠍ဳᯏ䉕䈪䈐䉎Ბ㓏䉁䈪䈐䉁䈚䈢䋮ផㅴ䉣䊮 䉳䊮䈮䈧䈇䈩䈲䋬ォゲᵹ䊐䉜䊮䈱ᵹ⸃ᨆ䉕⚳䈋䋬╙䋱Ბ䊐䉜䊮䈱⹜䉕⚳䈋䉁䈚䈢䋮㩷
એ䈱⸳䈱ᢛ䉇⎇ⓥ䈱ㅴ䈱ⷐ䉕ᧄᐕᰴႎ๔ᦠ䈮䉁䈫䉄䉁䈚䈢䋮ᦝ䈮䋬⚦䈭⎇ⓥౝኈ 䈮䈧䈇䈩䈲䋬ቇળ╬䈪⊒䈚䉁䈚䈢⺰ᢥ䉕ෳᾖ䈇䈢䈣䈐䈢䈇䋮㩷
㩷
㩷 ⎇ⓥ㐿⊒ᵴേ䈱ㅴ䉇⹜㛎⸳╬䈱⚦䈮䈧䈇䈩䈲䋬ᧄቇ䈱䊖䊷䊛䊕䊷䉳䈱㑐ㅪᣉ⸳䊥䊮䉪
䇸⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥ䉶䊮䉺䊷䇹䈱㗄䉕ෳᾖਅ䈘䈇䋮䋨㪿㫋㫋㫇㪑㪆㪆㫎㫎㫎㪅㪸㫇㫉㪼㪺㪅㫄㫌㫉㫆㫉㪸㫅㪄㫀㫋㪅㪸㪺㪅㫁㫇㪆䋩㩷
㩷
⋡ ᰴ
Ꮞ㗡⸒㩷
⎯㩷 ⹜㛎䉟䊮䊐䊤䈱ᢛㅴ䉃㩷
センター長 棚次 亘弘
研 究 紹 介
[機体関連]ዊဳήੱ㖸ㅦᯏ䈱ⓨജ․ᕈ䈮㑐䈜䉎⎇ⓥ – ⎇ⓥᚑᨐႎ๔... 1
機械システム工学専攻 工藤 摩耶
ዊဳήੱ㖸ㅦ㘧ⴕᯏ䈱㘑ᵢ⹜㛎↪ᯏᮨဳ䈱⸳⸘ – ႎ๔... 10
機械システム工学科 笹山 容資 JAXA
ቝቮ⑼ቇ⎇ⓥᧄㇱ䈱㜞ㅦ᳇ᵹ✚วታ㛎⸳䉕↪䈚䈢㘑ᵢ⹜㛎 – ታᣉႎ๔
... 13機械システム工学科 笹山 容資
ዊဳ㖸ㅦήੱᯏ䈱ᯏ᭴ㅧ䈮㑐䈜䉎⎇ⓥ – ⎇ⓥ⚿ᨐႎ๔... 22
機械システム工学科 今井 駿 [飛行技術関連]
䊌䊤䊐䉤䉟䊦㘧ⴕᛛⴚ䈫⥶ᴺ䉝䊎䉥䊆䉪䉴♽䈱⎇ⓥ
Ɇ⎇ⓥ⚿ᨐႎ๔
... 28機械システム工学科 助教授 溝端 一秀 [エンジン関連]
ォゲᵹ䊐䉜䊮䉺䊷䊗䉳䉢䉾䊃䉣䊮䉳䊮䈱⎇ⓥ – ⎇ⓥ⚿ᨐႎ๔
... 31機械システム工学科 助手 湊 亮二郎
ዊဳ䉺䊷䊗䉳䉢䉾䊃䉣䊮䉳䊮䈱ᝄേ․ᕈ䈱⎇ⓥ – ⎇ⓥ⚿ᨐႎ๔
... 34機械システム工学専攻 四宮 徹
ᾲಽ⸃ๆᾲᔕΆᢱ䈱ౣ↢಄ළ․ᕈ䈮㑐䈜䉎⎇ⓥ
... 43 生産情報システム工学専攻 木村 博幸ᾲಽ⸃ๆᾲᔕΆᢱ䈱Ά䈮㑐䈜䉎⎇ⓥ – ⎇ⓥ⚿ᨐႎ๔
... 47機械システム工学科 助手 湊 亮二郎 [試験設備関連]
⹜㛎ⵝ⟎ᢛႎ๔ — ਛဳ㖸ㅦ㘑ᵢ䈱ᢛ䈫․ᕈᡷༀ
... 50⹜㛎ⵝ⟎ᢛႎ๔㩷
—㩷 䊐䊤䉟䊃䉲䊚䊠䊧䊷䉺ⵝ⟎䈱⸳⟎... 55 機械システム工学科 助教授 溝端 一秀⹜㛎ⵝ⟎ᢛႎ๔㩷
—㩷 㜞ㅦⴕ゠ⵝ⟎⸳⟎䈱䈢䉄䈱㛍㖸⸘᷹ ... 56 センター長 棚次 亘弘⹜㛎ⵝ⟎ᢛႎ๔㩷
—㩷 㜞ㅦⴕ゠⹜㛎ⵝ⟎䈱੍ᬌ⸛䋨᳓േⵝ⟎䈱․ᕈ⺞ᩏ䋩... 57 センター長 棚次 亘弘 [共同研究報告]ห⎇ⓥႎ๔䋨JAXA ቝቮ⑼ቇ⎇ⓥᧄㇱ䋩㩷
—㩷 ᮨᡆ䉣䊮䉳䊮䉕タ䈚䈢นᄌ⠢ዊဳ㖸ㅦήੱᯏ䈱ⓨജ․ᕈ䈱᷹ቯ... 60
センター長 棚次 亘弘
ห⎇ⓥႎ๔䋨ᩣᑼળ␠㚍႐ᯏ᪾ᚲ䋩㩷
—㩷 ⥶ⓨቝቮᯏ↪⭯⡺ㇱ᧚䈱⹜䈫ᦛ㕙ᒻ⁁⹏ଔᣇᴺ䈱⎇ⓥ... 61
機械システム工学科 助教授 溝端 一秀
ห⎇ⓥႎ๔䋨ᩣᑼળ␠
ASI✚⎇䋩㩷
—㩷 ォゲᵹ䊐䉜䊮䉺䊷䊗䉳䉢䉾䊃䈱⎇ⓥ㐿⊒... 65 機械システム工学科 助手 湊 亮二郎⊒⺰ᢥ
... 68⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥ䉶䊮䉺䊷䈱ᡰេ䈮䉋䉍ታᣉ䈚䈢⻠Ṷળ䈍䉋䈶䉶䊚䊅䊷
... 70㩷
図1 小型無人超音速機を用いた飛行実験の構想図.
ዊဳήੱ㖸ㅦᯏ䈱ⓨജ․ᕈ䈮㑐䈜䉎⎇ⓥ㩷 㵨㩷 ⎇ⓥᚑᨐႎ๔㩷
㩷
㩷 ⠀↰㩷 ዏᄥ㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷䂾㩷 Ꮏ⮮㩷 ⡍㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷 㩷 ╣ጊ㩷 ኈ⾗㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷 㩷 Ḵ┵㩷 ৻⑲㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ഥᢎ䋩㩷
㩷 Ḋ㩷 ੫ੑ㇢㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ഥᚻ䋩㩷
㩷 ᰴ㩷 ਗ਼ᒄ㩷 䋨⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥ䉶䊮䉺䊷㐳䋬ᢎ⢒⎇ⓥ╬ᡰេᯏ᭴㩷 ᢎ䋩㩷
㩷 㩷
1
研究概要・目的
現在,次世代型超音速旅客機や次世代型宇宙輸送システムの研究開発が先進諸国で進められて いる.これらの研究開発には,亜音速から極超音速域における推進系,機体系,制御系等の基盤 技術に革新をもたらすことが必要であり,そのためには実飛行条件下での実証が重要である.そ こで,室蘭工業大学を含む国内
4大学と
JAXAの連携により,研究開発した基盤技術の飛行実証 プロジェクトが進められている.マッハ
2以上の極超音速域における飛行実証は
JAXAが担当し ており,気球利用型実験機による飛行実証などが計画されている.一方,亜音速から超音速域の 飛行実証は大学が担当しており,大学の規模に見合った小型無人超音速機による飛行実証を計画 している[1].同超音速機は全長
3m程度とされ,亜音速離着陸から超音速巡航(目標マッハ数
1.4〜2.0)の全飛行プロファイル(図
1)を達成することが求められている.本研究の目的は,革新的な基盤技術を飛行実証するためのフライングテストベッドである,小 型無人超音速機の適切な機体形状を見出すことである.2005 年度までに設計した機体形状案は,
亜音速巡航性能と超音速巡航性能を両立させることを目指した可変翼式機体形状(K2005 機体)
と,超音速実飛行データを取得するための加速飛行性能を重視した固定翼式機体形状(M2005 機 体)の
2つである.これらの機体形状について風洞試験を行い,加速性能や飛行性能を評価した 結果,K2005 機体および
M2005機体は超音速への加速飛行が不可能であることがわかった.
以上より,2006 年度はこれら
2つの機体形状について改良を進めた第二次機体設計案(K2006
機体,M2006 機体)と,Closed Coupled Canard や
Area Ruleなどの要素研究を目的とした機体設計
案(O2006 機体)の合計
3体の機体形状を設計した.そしてこれらの機体形状について風洞試験
を行うことによって,亜音速・遷音速・超音速域の空力特性データを取得した.
図2 K型機体形状(K2006機体)の概観図(KL形態,後退角30deg./KH形態,後退角56deg.).
2
小型無人超音速機の空力設計
小型無人超音速機の第
2次機体設計案として,以下の
3つの機体形状を設計した.これらの機 体形状の空力設計においては,空力推算ツールの
DATCOM[2],[3]等を利用し,翼形状に関するパラメトリックスタディ等を実施した.
(1)
機体設計案
1:K型機体形状(可変後退翼式)
九州大学と室蘭工業大学の共同により,K 型機体形状の第
1次形状(K2005 機体)[4]のコンフ ィグレーションを変更し,第
2次形状(K2006 機体)を設計した.
K2006機体の概観図を図 2 に,
その主な諸元を表
1に示す.この
K2006機体形状には,亜音速域から超音速域にかけての幅広い 飛行速度範囲で高い飛行性能を維持させることを目指して,可変後退翼を搭載する.亜音速飛行 時にはその主翼前縁後退角を
30 deg.とし,超音速飛行時には同後退角を56 deg.とする.以下,前者の形態を
KL形態(低速形態) ,後者の形態を
KH形態(高速形態)と称す.表
2に
K2005機体
から
K2006機体への主な変更点を示す.
表
1 小型無人超音速機の主な諸元.K型機体(K2006)
機体の諸元
KL(低速形態) KH(高速形態) M型機体(M2006) O型機体(O2006)
全長 [m] 3.28 (0.350) 3.28 (0.350) 3.12 (0.545) 3.22 (0.443) 翼幅 [m] 2.80 (0.284) 1.90 (0.219) 1.61 (0.282) 2.20 (0.303) 高さ(離着陸装置を除く) [m] 0.83 (0.104) 0.83 (0.104) 0.52 (0.080) 0.66 (0.091) 空力平均翼弦 [m] 0.65 (0.065) 0.73 (0.071) 0.79 (0.139) 0.98 (0.135) 翼面積 [m2] 1.55 (0.014) 1.26 (0.013) 0.96 (0.029) 1.64 (0.031) 主翼前縁後退角 [deg.] 30 56 66, 61 53.1
主翼アスペクト比 5.06 2.87 2.71 2.95
※ ( )内は風洞模型の諸元.
表2 K型機体の変更点.
変更項目 変更内容 効果
胴体 ・全体の細胴化 ・抗力の低減
胴体後部 ・翼胴接合部やナセル周辺を滑らかな曲面とする ・翼胴干渉やナセル抗力の低減 主翼(低後退角翼) ・翼面積を約10%増加 ・揚力の増加
主翼(高後退角翼) ・翼面積を約5%減少
・後退角の増加 ・抗力の低減
主翼可変形式 ・引き込み式の採用 ・トリム抗力低減
・重心移動幅の減少
カナード翼 ・容積の増大 ・トリム能力の向上
(2)
機体設計案
2:M型機体形状(固定翼式)
室蘭工業大学の設計による
M型機体形状の第
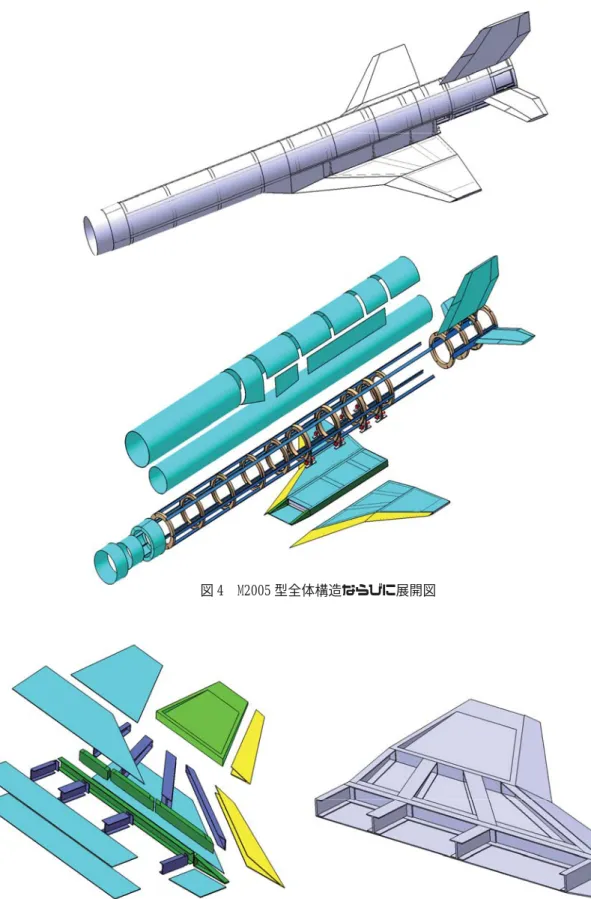
2次形状の概観図を図
3に,その主な諸元を表
1に示す[5].M2005 機体の解析結果から,超音速飛行の実現が困難ということが判明したため,
M2006
機体は超音速飛行性能を重視し,M2005 機体のデータを踏まえ,機体設計を行った.表
3に
M2005機体から
M2006機体への主な変更点を示す.
表3 M型機体の変更点.
変更項目 コンフィグレーション 効果
エンジンの搭載数 2基 ・推力の増強
エンジンの搭載位置 胴体両脇 ・燃料の搭載スペースの増加
・偏揺れの不安定性を軽減
胴体形状 楕円形状 ・胴体の断面積を極力小さくし,抗力の低減をねらう
翼平面形 アロー翼
・揚抗比の改善
・アスペクト比を小さくし,抗力を低減
・後退角を大きくし,抗力を低減及び抗力発散マッハ数を 高める
・剛性の確保
翼型 ダイヤモンド翼型 ・遷音速領域の速やかな通過
・造波抗力の低減 翼の取り付け位置 高翼式 ・横揺れ安定性の確保
61.0 66.0
1000 1609
1.0 3116
521
アヴィオニクス系 燃料
図3 M型機体形状(M2006機体)の概観図.
(3)
機体設計案
3:O型機体形状(固定翼式)
大阪府立大学の設計による
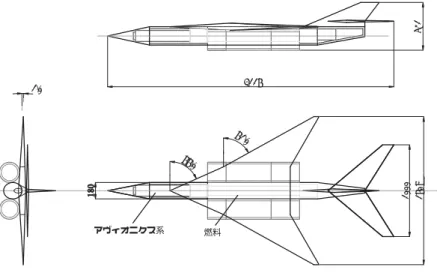
O型機体形状の概観図を図
4に,その主な諸元を表
1に示す[6].
O2006
機体のコンセプトは
Close Coupled Canardと
Area Ruleによる亜音速飛行性能と超音速飛行 性能の両立である.Close Coupled Canard は低速飛行時(特に高迎角時)に高い揚力を発生させる 効果があるが,超音速飛行を行う際の遷音速域における抗力の急激な増加が問題となる.そこで,
胴体に
Area Ruleを適用し,遷音速域における造波抗力を削減させ,音速突破および超音速飛行の
実現を目指す.また,エンジンは機体中心に配置し,サイドインテークを採用する.
3
風洞試験
本試験では,JAXA 宇宙科学研究本部の遷音速風洞(Mach 0.3〜1.3)と超音速風洞(Mach 1.5
〜4.0)を利用して,上述の
3つの機体形状の基礎空力特性データを取得する.詳しくは本書の「小 型無人超音速飛行機の風洞試験用機体模型の設計製作」と「JAXA 宇宙科学研究本部の高速気流 総合実験設備を利用した風洞試験」を参照されたい.
図4 O型機体形状(O2006機体)の概観図.
4
研究結果
4.1. 機体の基礎空力特性
風洞試験で得られた各種空力特性データとその解析結果を以下にまとめる.K2006 機体の空力 特性を図
5に,M2006 機体の空力特性を図
6に,O2006 機体の空力特性を図
7に示す.本試験に おける気流のレイノルズ数(主翼
MAC基準)は,K 型機体模型に関しては
7.5×105〜2.15×10
6程度,M 型機体模型に関しては
1.3×106〜4.2×10
6程度,O 型機体模型に関しては
1.2×106〜4.0
×10
6であった.
(1) K2006
機体の空力特性
KL
形態と
KH形態の基礎空力特性を図
5に示す.両図(a)より,
M=0.7以下のマッハ数では両形 態の
CD値に大きな差異は見られない.しかし,低速形態では
M=0.9以上で
CD値が増加傾向を示 し,M=1.1 では
CD値が急増することがわかる.一方,高速形態では
M=1.1,1.3において
CD値が 急増するが低速形態より低い値であることがわかる.更に,マッハ数遷移試験の結果(図
5(b))より,
KL形態と
KH形態の抗力係数のピークはそれぞれ
Mach 1.04, 1.14付近で生じ,そのピーク 値はそれぞれ
0.076,0.060であった.以上より,後退角の増大,および翼面積の減少によって抗 力が低減されていることがわかる.また,
CD値の変動傾向から
M=0.7程度で低速形態から高速形 態に変更させると効果的であると考えられる.
図
5(c)に,Mach 1.1におけるシュリーレン可視化結果を示す.主流方向は左から右である.同
図より,主翼後退角を拡大することによって,主翼前縁で発生する衝撃波が抑制されていること がわかる. (両図には,シュリーレン可視化結果の衝撃波の発生位置と模型の各コンポーネントと の関係を明確にするために,機体模型の写真を重ねている. )
図
5(d)にK2006機体の揚力特性を示す.同図より,
KH形態よりも
KL形態の方が大きな揚力傾
斜
dCL/dαを示すことがわかる.このことより,亜音速域における主翼後退角の縮小が揚力増大効 果をもたらすことが確認できる.また,遷音速域から超音速域にかけては,マッハ数の増加に伴 って揚力傾斜が低下する傾向が見られる.
図
5(e)に重心周りのピッチングモーメント特性を,図5(f)にカナードの操舵特性を示す.なお,頭上げ方向のモーメントを正とする.(e)より,KL 形態での
M=1.1以外の全ての測定マッハ数に おいて,迎角の増加に伴い,C
Mが増加しており,両形態とも縦の静安定が得られていない.これ はカナード容積の設定不良が原因であると考えられる.
(f)より,カナードの舵角を0deg.から5deg.へ変化させることにより
CM値は上昇するが,主翼後退角やマッハ数の変化によるカナードの効果
の変動はほとんど見られない.
図4 風洞試験結果1:K型機体の基礎空力特性とシュリーレン可視化結果
(気流のレイノルズ数:7.5×105〜2.15×106,主翼MAC基準). (c) シュリーレン映像(Mach 1.1,迎角0 deg.)(左:KH形態,右:KL形態).
‑0.16
‑0.12
‑0.08
‑0.04 0.00 0.04 0.08 0.12 0.16
10 8 6 4 2 0
‑2
‑4
‑6 ALPHA [deg.]
CM Low sweepback comfiguration M=0.3 M=0.7 M=0.9 M=1.1
High sweepback configuration M=0.7 M=0.9 M=1.1 M=1.3
(e) ピッチングモーメント曲線.
(d) 揚力曲線.
0.8
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6 CL
10 8 6 4 2 0 -2 -4
-6 ALPHA[deg.]
Low sweepback formation M=0.3 M=0.7 M=0.9 M=1.1
High sweepback formation M=0.7 M=0.9 M=1.1 M=1.3
0.10
0.08
0.06
0.04
0.02
0.00 CD
1.40 1.20 1.00 0.80 0.60 0.40 0.20
Mach Number Low sweepback configuration High sweepback configuration (Λ=30deg.) (Λ=56deg.)
fix, 0deg. fix, 0deg.
Sweep, 0deg. Sweep, 0deg.
M=1.04,CD=0.0757 (Sweep)
M=1.14,CD=0.0597 (Sweep)
(b) 抗力係数のマッハ数依存性.
-0.08 -0.06 -0.04 -0.02 0.00 0.02 0.04 0.06 CM 0.08
8 6 4 2 0 -2 -4
ALPHA[deg.]
canard 0[deg.]
M=0.7(KL) canard+5[deg.]
M=0.7(KL) 0.20
0.15
0.10
0.05
0.00
-0.05
-0.10
-0.15 CM
8 6 4 2 0 -2 -4
ALPHA[deg.]
canard 0[deg.]
M=0.7(KH) canard+5[deg.]
M=0.7(KH)
(f) カナード操舵特性(Mach 0.7)(左:KH形態,右:KL形態).
0.80
0.60
0.40
0.20
0.00
‑0.20
‑0.40
‑0.60
0.16 0.14 0.12 0.10 0.08 0.06 0.04 0.02 0.00
Low sweepback configuration M=0.3 M=0.7 M=0.9 M=1.1 High sweepback configuration M=0.7 M=0.9 M=1.1 M=1.3 6 deg.
4 deg.
2 deg.
0 deg.
-2 deg.
CD CL
(a) 極曲線.
4
3
2
1
0
‑1
‑2
‑3‑3 ‑2 ‑1 0 1 2 3 4 5
M=0.3 M=0.7 M=0.9 M=1.1 M=1.3 M=1.5 M=1.7 M=1.9 M=2.0 ALPHA [deg.]
L/D
(d) 揚抗比曲線.
図6 風洞試験結果3:M2006機体の基礎空力特性
0.25
0.20
0.15
0.10
0.05
0.00
‑0.05
‑0.10
‑0.15
5 4 3 2 1 0
‑1
‑2
‑3
M=0.3 M=0.7 M=0.9 M=1.1 M=1.3 M=1.5 M=1.7 M=1.9 M=2.0 ALPHA [deg.]
CL
(c) 揚力曲線.
0.10
0.09
0.08
0.07
0.06
0.05
0.040.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 fix,0deg.
sweep.0deg.
M=1.13,CD=0.081 (sweep) CD
Mach Number
(b) 抗力係数のマッハ数依存性.
(a) 極曲線.
0.25
0.20 0.15
0.10
0.05 0.00
‑0.05
‑0.10
‑0.15
0.10 0.09 0.08 0.07 0.06 0.05 0.04 0.03
M=0.3 M=0.7 M=0.9 M=1.1 M=1.3 M=1.5 M=1.7 M=1.9 M=2.0 CD 0 deg.
1 deg.
2 deg.
3 deg.
4 deg.
-1 deg.
-2 deg.
CL
(e) ピッチングモーメント曲線
(MAC50%位置).
‑0.06
‑0.04
‑0.02 0.00 0.02 0.04 0.06
5 4 3 2 1 0
‑1
‑2
‑3
M=0.3 M=0.7 M=0.9 M=1.1 M=1.3 M=1.5 M=1.7 M=1.9 M=2.0
ALPHA [deg.]
CM
‑0.06
‑0.04
‑0.02 0.00 0.02 0.04 0.06
5 4 3 2 1 0
‑1
‑2
‑3 M=0.3 M=0.7 M=0.9 M=1.1 M=1.3 M=1.5 M=1.7 M=1.9 M=2.0 CM
ALPHA [deg.]
(f) ピッチングモーメント曲線
(MAC60%位置). (2) M2006
機体の空力特性
M2006
機体の極曲線を図
6(a)に,マッハ数遷移試験の抗力係数を図6(b)に示す.両図より,その抗力係数は
Mach 1.1から増加傾向を示し,
Mach 1.13でピーク値
0.081を示した.抗力係数の値 が最大値をとった後は,約
M=1.7まで抗力係数は減り続け,その後一様流マッハ数が増加しても,
抗力係数に大きな変動は見られない.
図
6(c)にM2006機体の揚力特性を示す.同図より,亜音速域における揚力係数よりも,超音速
域における揚力係数のほうが高いことが分かる.その揚力傾斜
dCL/dαは遷音速域に近づくにつれ て大きくなり,M=1.1 でピークを向かえる.そして遷音速から超音速域に入ると,揚力傾斜が小 さくなっていくことが分る.しかし,図
6(d)に示すように揚抗比で見ると,抗力が大きいため,亜音速域より超音速域の揚抗比の方が小さくなることがわかる.
図
6(e)および(f)にM2006機体の空力中心周りのピッチングモーメント特性を示す.ただし,空
力中心の位置は空力平均翼弦の
50%位置(同図(e)),60%位置(同図(f))である.(e)より,この
機体のピッチングモーメント曲線は亜音速域ではほぼ一定値を取っているが,超音速域では右下
がりの傾向が見られる.また,(f)より,超音速域の
CMはほぼ一定の値を示し,亜音速域の
CMは
右上がりの様子を示す.以上より,
M2006機体の風圧中心位置は亜音速域ではおよそ
MAC50%位置,超音速域ではおよそ
MAC60%位置にあるといえる.㪇㪅㪇㪇 㪇㪅㪇㪌 㪇㪅㪈㪇
㪇㪅㪏 㪇㪅㪐 㪈 㪈㪅㪈 㪈㪅㪉 㪈㪅㪊 㪤㪸㪺㪿㪅㪥㪅
㪚㪛
㪇㪅㪇㩼 㪈㪇㪅㪇㩼 㪉㪇㪅㪇㩼 㪊㪇㪅㪇㩼 㪋㪇㪅㪇㩼
㰱㪚㪛
㫎㫀㫋㪿㫆㫌㫋㩷㪘㫉㪼㪸㩷㪩㫌㫃㪼 㫎㫀㫋㪿㩷㪘㫉㪼㪸㩷㪩㫌㫃㪼 㰱㪚㪛
図7 風洞試験結果3:O2006機体の抗力係数のマッハ数依存性
(気流のレイノルズ数:1.2×106〜4.0×106,主翼MAC基準). (3) O2006
機体の空力特性
図
7に迎角
0°のマッハ数に対する抗力係数の変化を示す.図より,Area Ruleを適用した形状
の方が大きい抗力を示していることが分かる.これは,投影面積を考慮せずに断面積分布を平滑 化し,前面投影面積が
25%増加したことによる.抗力は前面投影面積に比例して増加するが,その増加(
ΔCD)は,10%程度である.したがって,前面投影面積が増加しないように
Area Ruleを適用すれば遷音速域において
10〜25%程度の抗力削減が見込まれる.4.2. 飛行実験の実現可能性の検討
風洞試験で得られた基礎空力特性データと,同機に搭載される予定の小型ターボジェットエン ジンの性能推算値[7](地上静止状態の推力:141 [kgf])に基づいて,K2006 機体,M2006 機体お
よび
O2006機体の
3つの機体の推力余裕を検討し, 到達可能飛行マッハ数を予測した. その結果,
各機体の到達可能飛行マッハ数は表
4のように推測された.
表4 各機体の到達可能飛行マッハ数.
到達可能飛行マッハ数
KL形態 0.94
K2006機体
KH形態 1.04
M2006機体 1.58以上
O2006機体 0.85
5
まとめ
本研究では,小型超音速無人機の第
2次機体設計案として,亜音速巡航性能と超音速巡航性能
の両立を目指した可変後退翼式の
K2006機体形状と,超音速飛行データの取得を最優先項目とし
て加速飛行性能を重視した
M2006機体形状,Closed Coupled Canard や
Area Ruleなどの要素研究
を目的とした
O2006機体形状の
3つを提案した.そして,JAXA 宇宙科学研究本部の高速気流総
合実験設備を利用して風洞試験を行うことによって,それらの機体の基礎空力特性データを取得
した.その結果,K2006 機体については,機体コンフィグレーションの変更によって,遷音速域 から超音速域にかけて大きな抗力低減効果が得られることが確認できたが,縦の静安定が得られ ていないことがわかった.M2006 機体の揚力係数は亜音速域よりも超音速域のほうが高いが,揚 抗比で見ると抗力が大きいため,亜音速域より超音速域の方が揚抗比は低くなることがわかった.
また,O2006 機体については,Area Rule を適用した形状の方が,抗力係数が大きくなっており,
前面投影面積が増加しないように
Area Ruleを適用する必要があることがわかった.
更に,風洞試験で取得した空力特性データに基づいて, K2006 機体,
M2006機体,O2006 機体を 用いた飛行実験の成立性を検討した.その結果,K2006 機体および
O2006機体については,到達 可能飛行マッハ数は
0.85〜1.04程度にとどまることが推測された.M2006 機体については,到達 可能飛行マッハ数は
1.58以上となり,当飛行実験において超音速飛行を達成することが可能であ ると推測された.
謝辞
この度,JAXA 宇宙科学研究本部の高速気流総合実験設備を利用して風洞試験を実施するにあ たり,同宇宙科学研究本部の入門朋子様より,多大なるご協力とご助言を賜りました.
また,本風洞試験で使用した機体模型の製作においては,アジア模型株式会社様,有限会社馬 場機械製作所の馬場義則様と同製作所の従業員の皆様,日鋼デザイン株式会社の山田富士夫様,
佐々木和之様,室蘭テクノセンターの花岡裕様より,多大なるご協力とご尽力を賜りました.
この場をお借りして深く感謝の意を表します.
参考文献
[1] 溝端一秀,湊亮二郎,棚次亘弘,木村博幸,姫野武洋,小林弘明,小島孝之,麻生茂,谷泰寛,新井隆景,
「大学連携による小型超音速無人飛行機の開発構想」,第49回宇宙科学技術連合講演会,3E05,広島,2005 年11月.
[2] Digital DATCOM, Public Domain Aeronautical Software (PDAS) CD-ROM, www.pdas.com.
[3] USAF Stability and Control DATCOM, McDonnell Douglas Corporation and Air Force Flight Dynamics Laboratory, 1978.
[4] 谷泰寛,麻生茂,溝端一秀,湊亮二郎,棚次亘弘,木村博幸,羽田尚太,本郷素行,「小型超音速無人飛行 機の機体空力設計と風洞試験」,第49回宇宙科学技術連合講演会,3E07,広島,2005年11月.
[5] 羽田尚太,棚次亘弘,溝端一秀,湊亮二郎,木村博幸,工藤摩耶,麻生茂,谷泰寛,新井隆景,「小型超音 速飛行実験のための有翼機体の空力設計と風試結果」,平成18年度宇宙輸送シンポジウム,相模原,2007年1 月.
[6] 新井隆景,坂上昇史,岩崎裕之,楠亀拓也,溝端一秀,棚次亘弘,湊亮二郎,「小型超音速飛行実験のため の低速域空力性能改善手法の提案」,平成18年度宇宙輸送シンポジウム,相模原,2007年1月.
[7] 湊亮二郎,戸倉郁夫,棚次亘弘,姫野武洋,小島孝之,小林弘明,「小型超音速無人飛行機のための小型タ ーボジェットエンジンの予備設計」,第49回宇宙科学技術連合講演会,3E06,広島,2005年11月.
ዊဳήੱ㖸ㅦ㘧ⴕᯏ䈱㘑ᵢ⹜㛎↪ᯏᮨဳ䈱⸳⸘㩷 㵨㩷 ႎ๔㩷
㩷
㩷 ⠀↰㩷 ዏᄥ㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷㩷 Ꮏ⮮㩷 ⡍㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷 䂾㩷 ╣ጊ㩷 ኈ⾗㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷
㩷 Ḵ┵㩷 ৻⑲㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ഥᢎ䋩㩷
㩷 ᰴ㩷 ਗ਼ᒄ㩷 䋨⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥ䉶䊮䉺䊷㐳䋬ᢎ⢒⎇ⓥ╬ᡰេᯏ᭴㩷 ᢎ䋩㩷
㩷
1
風洞試験用機体模型
2006
年度の宇宙航空研究開発機構宇宙科学研究本部(JAXA/ISAS)における風洞試験の実施に あたり,設計した
3つの機体(K 型機体形状,M 型機体形状,O 型機体形状)の風洞試験用機体 模型を製作した.それらの詳細を以下に示す.
1.1. K型機体模型(可変後退角翼式)
K
型機体形状の風洞試験用機体模型の概観を図
1に示す.同図(a)は主翼前縁後退角が
30 deg.となる亜音速飛行形態(KL 形態) ,同図(b)は同後退角が
56 deg.となる超音速飛行形態(KH形態)
の写真である.この機体模型のスケールは
1/8である(その諸元については表
1を参照) .この機 体模型の可変パラメータとして,上述の主翼後退角(30, 56 deg.) ,カナードの舵角(0, 5 deg.)を 設けた.可変後退角翼の模擬方法としては後退角が異なる
2種類の主翼を付け換える方法を,カ ナードの舵角の変更方法は,胴体とカナードの間にスペーサーを挟む方法をとった.また,エン ジン部は加工上,流路を開口することができなかったため,閉塞状態とし,胴体と一体化させた.
主翼およびカナード翼はねじで胴体に固定した.この機体模型の材料としては,胴体部とエンジ ン部にアルミニウム材料を,翼に真鍮材料を採用した.㩷
㩷 㩷 㩷
図1 K型機体(可変後退角翼式機体)の機体模型(スケール1/8). (a) 亜音速飛行形態(KL,主翼前縁
後退角30 deg.)
(b) 超音速飛行形態(KH,主翼前 縁後退角56 deg.)
1.2. M型機体模型(固定後退角翼式)
M
型機体形状の風洞試験用機体模型の概観を図
2に示す.この機体模型のスケールは
1/5.7であ る(その諸元については表
1を参照) .この機体模型では,空力試験だけでなく,模擬エンジンに かかる抗力の測定を行った.そのため,模擬エンジンはエンジン内の抗力を測定するためのピト ー管を設置した抗力試験用と,ピトー管を設置していない空力試験用を製作した.
機体模型の製作に関しては,胴体の製作を容易にするために,胴体形状を楕円形状から長径を 直径とした円形状とした.また,水平尾翼は垂直尾翼に取り付けた際,水平尾翼と垂直尾翼との 間に隙間と段差が生じるので,その隙間をパテで埋めた.この機体模型の材料は,胴体前部をア ルミニウム材料,胴体中部をステンレス材料,胴体後部,翼,模擬エンジンは真鍮材料を採用し た.
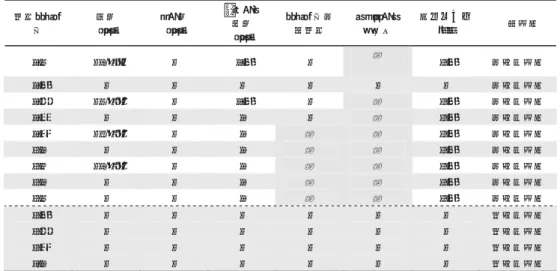
表1 風洞試験用機体模型の仕様等一覧.
㩷 㪢 ဳᯏᒻ⁁㩷 㪤 ဳᯏᒻ⁁㩷 㪦 ဳᯏᒻ⁁㩷
㩷 㖸ㅦ㘧ⴕᒻᘒ䋨㪢㪣䋩 㖸ㅦ㘧ⴕᒻᘒ䋨㪢㪟䋩 㩷 㩷
↪ᄤ⒊㩷 㪍 ಽജౝⵝᄤ⒊䋨㪥㫆㪅㪈㪃㩷 㱢㪉㪌㩷㫄㫄䋩㩷
ᮨဳ䈱䉴䉬䊷䊦㩷 㪈㪆㪏㩷 㪈㪆㪌㪅㪎㩷 㪈㪆㪎㪅㪉㪎㩷
ో㐳㪃㩷㫄㩷 㪇㪅㪋㪈㪇㩷㩿㪊㪅㪉㪏㪀㩷 㪇㪅㪋㪈㪇㩷㩿㪊㪅㪉㪏㪀㩷 㪇㪅㪌㪋㪎㩷㩿㪊㪅㪈㪈㪍㪀㩷 㪇㪅㪋㪋㪊㩷㩿㪊㪅㪉㪉㪀㩷
⢵ᓘ㪃㩷㫄㩷 㪇㪅㪇㪊㪉㪌㩷㩿㪇㪅㪉㪍㪀㩷 㪇㪅㪇㪊㪉㪌㩷㩿㪇㪅㪉㪍㪀㩷 㪇㪅㪇㪊㪌㩷㩿㐳ᓘ䋺㪇㪅㪉䋬⍴ᓘ䋺㪇㪅㪈㪏㪀㩷 㐳ᓘ䋺㪇㪅㪇㪌㩿㪇㪅㪊㪏㪀㩷 㩷 㩷 㩷
⍴ᓘ䋺㪇㪅㪇㪊㩿㪇㪅㪉㪋㪀㩷
⠢㪃㩷㫄㩷 㪇㪅㪊㪌㩷㩿㪉㪅㪏㪋㪀㩷 㪇㪅㪉㪊㪎㪌㩷㩿㪈㪅㪐㪀㩷 㪇㪅㪉㪏㪉㩷㩿㪈㪅㪍㪇㪐㪀㩷 㪇㪅㪊㪇㪊㩿㪉㪅㪉㪀㩷 㜞䈘䋨㔌⌕㒽ⵝ⟎䉕㒰䈒䋩㩷 㪃㩷㫄㩷 㪇㪅㪈㪇㪋㩷㩿㪇㪅㪏㪊㪉㪀㩷 㪇㪅㪈㪇㪋㩷㩿㪇㪅㪏㪊㪉㪀㩷 㪇㪅㪇㪐㪈㩷㩿㪇㪅㪌㪉㪈㪀㩷 㪇㪅㪇㪐㪈㩿㪇㪅㪍㪍㪀㩷
ⓨജᐔဋ⠢ᒏ䋨㪤㪘㪚䋩㪃㩷㫄㩷 㪇㪅㪇㪍㪌㩷㩿㪇㪅㪍㪌㪋㪀㩷 㪇㪅㪇㪎㪈㩷㩿㪇㪅㪎㪊㪊㪀㩷 㪇㪅㪈㪋㪇㩷㩿㪇㪅㪎㪐㪍㪀㩷 㪇㪅㪈㪊㪌㩿㪇㪅㪐㪏㪀㩷
⠢㕙Ⓧ㪃㩷㫄㪉㩷 㪇㪅㪇㪈㪍㩷㩿㪈㪅㪌㪌㪀㩷 㪇㪅㪇㪈㪊㩷㩿㪈㪅㪉㪍㪀㩷 㪇㪅㪇㪉㪐㩷㩿㪇㪅㪐㪌㪌㪀㩷 㪇㪅㪇㪊㪈㩿㪈㪅㪍㪋㪀㩷
ਥ⠢೨✼ᓟㅌⷺ㪃㩷㪻㪼㪾㪅㩷 㪊㪇㩷 㪌㪍㩷 㪍㪍䋬㪍㪈㩷 㪌㪊㪅㪈㩷
ਥ⠢䉝䉴䊕䉪䊃Ყ㩷 㪋㪅㪉㪏㩷 㪉㪅㪌㪐㩷 㪉㪅㪇㪉㩷 㪉㪅㪐㪌㩷
ᮨᡆ䉣䊮䉳䊮䈱ή㩷 䈭䈚㩷 䈅䉍㩷 䈭䈚㩷
นᄌ䊌䊤䊜䊷䉺㩷 䊶ਥ⠢೨✼ᓟㅌⷺ䋨㪊㪇㪃㩷㪌㪍㩷㪻㪼㪾㪅䋩㩷
䊶䉦䊅䊷䊄⥽ⷺ䋨㪇㪃㩷㪌㩷㪻㪼㪾㪅䋩㩷 䈭䈚㩷 䈭䈚㩷
↪᧚ᢱ㩷 䊶⢵䋬䉣䊮䉳䊮䋺䉝䊦䊚䊆䉡䊛᧚ᢱ㩷
䊶ਥ⠢䋬䉦䊅䊷䊄⠢䋬ု⋥የ⠢䋺⌀㎕᧚ᢱ㩷
䊶⢵೨ㇱ䋺䉝䊦䊚䊆䉡䊛᧚ᢱ㩷 䊶⢵ਛㇱ䋺䉴䊁䊮䊧䉴᧚ᢱ㩷 䊶⢵ᓟㇱ䋬⌀㎕᧚ᢱ㩷 䊶⠢䋬䉣䊮䉳䊮䋺⌀㎕᧚ᢱ㩷
䊶䉝䊦䊚䊆䉡䊛᧚ᢱ㩷
⸳⸘⠪㩷 Ꮊᄢቇ䋬ቶ⯗Ꮏᬺᄢቇ㩷 ቶ⯗Ꮏᬺᄢቇ㩷 ᄢ㒋ᐭ┙ᄢቇ㩷
⠪㩷 䉝䉳䉝ᮨဳᩣᑼળ␠㩷
䇾㪏㪈㪈㪄㪉㪉㪇㪎㩷 ጟ⋵☺ደᔒ↸ᄢሼධ㉿ 㪈㪉㪋㪄㪈㩷
㒢ળ␠㚍႐ᯏ᪾ᚲ㩷
䇾㪇㪌㪇㪄㪇㪇㪎㪋㩷 ቶ⯗Ꮢਛፉ↸ 㪋㪄㪈㪎㪄㪐㩷 ᄢ㒋ᐭ┙ᄢቇ㩷 㶎ਛ⻉ర䈱ᒐౝ䈱ᢙ୯䈲ታᯏ䈱⻉ర䋮
2 M 1/5.7).
㩷
1.3. O型機体模型(固定後退角翼式)
大阪府立大学の設計による
O型機体形状の風洞試験用機体模型の概観を図
3に示す.この機体 模型のスケールは
1/7.27である(その諸元については表
1を参照) .この機体模型は,空力試験に より
Close Coupled Canardと
Area Ruleの効果の測定を行っている.そのため,胴体は
Area Ruleを適用した場合としていない場合について製作した.
機体模型の製作に関しては,エンジン部の流路を開口できなかったため,流路は閉塞状態とし,
胴体と一体化している.この機体模型の材料は,全てアルミニウム材料を採用している.
図
3 O型機体(固定後退角翼式機体)の機体模型(スケール
1/7.27).
2
機体模型の設計・製作に関する反省・改善項目
㩷
・
M型機体模型について,納入後の機体形状,寸法が設計図面と異なっていた.
→模型の加工方法,加工精度について再検討する必要がある.
→模型の加工プログラムに問題がないか検討する.
⻢ㄉ㩷
本風洞試験で使用した機体模型の製作においては,アジア模型株式会社様,有限会社馬場機械 製作所の馬場義則様と同製作所の従業員の皆様,日鋼デザイン株式会社の山田富士夫様,佐々木 和之様,室蘭テクノセンターの花岡裕様より,多大なるご協力とご尽力を賜りました.
ご支援,ご協力を頂きました全ての皆様に,深く感謝の意を表します.
㪡㪘㪯㪘 ቝቮ⑼ቇ⎇ⓥᧄㇱ䈱㜞ㅦ᳇ᵹ✚วታ㛎⸳䉕↪䈚䈢㘑ᵢ⹜㛎㩷 㵨㩷 ታᣉႎ๔㩷
㩷
㩷 ⠀↰㩷 ዏᄥ㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷㩷 Ꮏ⮮㩷 ⡍㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷 䂾㩷 ╣ጊ㩷 ኈ⾗㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥቶ䋩㩷
㩷 Ḵ┵㩷 ৻⑲㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ഥᢎ䋩㩷 㩷 Ḋ㩷 ੫ੑ㇢㩷 䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ഥᚻ䋩㩷
㩷 ᰴ㩷 ਗ਼ᒄ㩷 䋨⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥ䉶䊮䉺䊷㐳䋬ᢎ⢒⎇ⓥ╬ᡰេᯏ᭴㩷 ᢎ䋩㩷
㩷
1
試験の概要
1.1. 試験題目
「模擬エンジンを搭載した可変翼小型超音速無人機の空力特性の測定」
1.2. 試験の目的
航空宇宙機システム研究センター(APReC)では,国内
4大学(室蘭工業大学,東京大学,九 州大学,大阪府立大学)による連携の下,小型無人超音速飛行機の研究開発プロジェクトを進め ている[1].昨年度より同プロジェクトでは,その機体形状案として,2 つのタイプの機体形状を 提案し,それらの空力設計を進めてきた.本試験では,昨年度の機体形状を改良した
2つのタイ プの機体形状(K 型機体,M 型機体)と,Close Coupled Canard と
Area Ruleの効果を測定するた めに新たに設計された機体形状(O 型機体)の風洞試験用供試体模型を用いて,基礎空力特性デ ータを取得する.
1.3. 試験実施期間
平成
18年
9月
19日(火)〜9 月
22日(金) ,
平成
18年
9月
25日(月)〜9 月
29日(金) (述べ
9日間) .
1.4. 試験従事者
本風洞試験の従事者を表
1に,宇宙科学研究本部内共同研究者および風洞試験設備利用補佐者 を表
2にまとめる.
表1 風洞試験従事者
᳁ฬ㩷 ᚲዻ㩷 ⡯ฬ䋯ቇᐕ㩷 ⠨㩷 ᓥᦼ㑆㩷
ᰴ㩷 ਗ਼ᒄ㩷 ቶ⯗Ꮏᬺᄢቇ㩷 ⥶ⓨቝቮᯏ䉲䉴䊁䊛⎇ⓥ䉶䊮䉺䊷㩷 䉶䊮䉺䊷㐳䊶ᢎ ⎇ⓥઍ⠪㩷 㩷
ᣂ㩷 㓉᥊㩷 ᄢ㒋ᐭ┙ᄢቇ㩷 ᄢቇ㒮Ꮏቇ⎇ⓥ⑼㩷 ⥶ⓨቝቮᶏᵗ♽ኾ㩷 ᢎ㩷 㩷 㪐 㪉㪈 ᣣ䌾㪐 㪉㪉 ᣣ
Ḵ┵㩷 ৻⑲㩷 ቶ⯗Ꮏᬺᄢቇ㩷 ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ഥᢎ㩷 㩷 㪐 㪉㪈 ᣣ䌾㪐 㪉㪉 ᣣ
⼱㩷 ᵏኡ㩷 Ꮊᄢቇ㩷 ᄢቇ㒮Ꮏቇ⎇ⓥ㒮㩷 ⥶ⓨቝቮᎿቇㇱ㐷㩷 ⻠Ꮷ㩷 㩷 㩷
Ḋ㩷 ੫ੑ㇢㩷 ቶ⯗Ꮏᬺᄢቇ㩷 ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ഥᚻ㩷 ⹜㛎ᓥ⽿છ⠪㩷 㪐 㪈㪐 ᣣ䌾㪐 㪉㪐 ᣣ
⠀↰㩷 ዏᄥ㩷 ቶ⯗Ꮏᬺᄢቇ㩷 ᄢቇ㒮Ꮏቇ⎇ⓥ⑼㩷 ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 ୃ჻⺖⒟ 㪉 ᐕ㩷 㩷 㪐 㪈㪐 ᣣ䌾㪐 㪉㪐 ᣣ ጤፒ㩷 ਯ㩷 ᄢ㒋ᐭ┙ᄢቇ㩷 ᄢቇ㒮Ꮏቇ⎇ⓥ⑼㩷 ⥶ⓨቝቮᶏᵗ♽ኾ㩷 ୃ჻⺖⒟ 㪉 ᐕ㩷 㩷 㪐 㪈㪐 ᣣ䌾㪐 㪉㪉 ᣣ Ꮏ⮮㩷 ⡍㩷 ቶ⯗Ꮏᬺᄢቇ㩷 ᄢቇ㒮Ꮏቇ⎇ⓥ⑼㩷 ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 ୃ჻⺖⒟ 㪈 ᐕ㩷 㩷 㪐 㪈㪐 ᣣ䌾㪐 㪉㪐 ᣣ
2
試験設備・試験機器等
2.1. 試験装置
本試験では,宇宙航空研究開発機構宇宙科学研究本部(JAXA/ISAS)の高速気流総合実験設備
[2](図 1)内に設置されている遷音速風洞試験装置(図 2(a))と超音速風洞試験装置(図 2(b))
を使用した.当設備の主な仕様[3]を表
3に示す.両風洞試験装置は共に間欠吹き出し式風洞であ り,前者の試験マッハ数は
0.3〜1.3,後者の試験マッハ数は 1.5〜4.0である.いずれも最大通風 計測時間は
30秒以上,測定室の寸法は
600 mm×600 mm(矩形)である.㩷
㪉㪅㪉㪅
風洞試験用機体模型㩷本風洞試験の実施にあたり,上述の
3つの機体の風洞試験用機体模型を製作した.対象とする
表2 宇宙科学研究本部内共同研究者,および風洞試験設備利用補佐者
᳁ฬ㩷 ᚲዻ㩷 ⡯ฬ㩷 ⠨㩷
ᧄㇹ㩷 ⚛ⴕ㩷 ቝቮ⥶ⓨ⎇ⓥ㐿⊒ᯏ᭴㩷 ቝቮ⑼ቇ⎇ⓥᧄㇱ㩷 ᛛቭ㩷 ᧄㇱౝห⎇ⓥ⠪㩷
㐷㩷 ሶ㩷 ቝቮ⥶ⓨ⎇ⓥ㐿⊒ᯏ᭴㩷 ቝቮ⑼ቇ⎇ⓥᧄㇱ㩷 ᛛቭ㩷 ⹜㛎⸳↪㩷
⮮㩷 ᷡ㩷 ቝቮ⥶ⓨ⎇ⓥ㐿⊒ᯏ᭴㩷 ቝቮ⑼ቇ⎇ⓥᧄㇱ㩷 ᛛቭ㩷 ⹜㛎⸳↪㩷
図2 JAXA宇宙科学研究本部 高速気流総合実験設備.
(c) 風洞試験装置の中央制御盤 (a) 遷音速風洞試験装置 (b) 超音速風洞試験装置
図1 JAXA宇宙科学研究本部 高速気流総合実
験設備の全体図.
表3 JAXA宇宙科学研究本部 高速気流総合実験設備の
主な仕様[2], [3].
ⵝ⟎䈱ฬ⒓ ㆫ㖸ㅦ㘑ᵢ⹜㛎ⵝ⟎㩷 㖸ㅦ㘑ᵢ⹜㛎ⵝ⟎㩷
㘑ᵢᒻᑼ㩷 㑆ᰳ็䈐ਅ䈚ဳ㩷 㑆ᰳ็䈐ਅ䈚ဳ㩷
䋨䉣䉳䉢䉪䉺ឃ᳇ᑼ䋩㩷
᷹ቯㇱኸᴺ 㪍㪇㪇㩷㫄㫄㬍㜞䈘 㪍㪇㪇㩷㫄㫄㩷 㪍㪇㪇㩷㫄㫄㬍㜞䈘 㪍㪇㪇㩷㫄㫄 䊙䉾䊊ᢙ▸࿐ 㪇㪅㪊㩷 䌾㩷 㪈㪅㪊㩷 㪈㪅㪌㩷 䌾㩷 㪋㪅㪇㩷
⸘᷹ᤨ㑆㩷 㪊㪇 ⑽એ㩷 㪊㪇 ⑽એ㩷
ⓨ᳇Ḯ⸳
䊶ⓨ᳇❗ᯏญജ䋺㩷 㪈㪈㩷㫂㪾㪆㪺㫄㪉㪞㩷 䊶⾂᳇ᮏജ䋺㩷 㪐㪅㪌㩷㫂㪾㪆㪺㫄㪉㪞㩷 䊶⾂᳇ᮏኈⓍ䋺㩷 㪈㪃㪎㪍㪎㫄㪊㩷
ᄌⷺ▸࿐㩷 ㄫⷺ䋬ᮮṖ䉍ⷺ㩷
㫧㪈㪌㩷㪻㪼㪾㪅એౝ㩷
ㄫⷺ䋬ᮮṖ䉍ⷺ㩷 㫧㪈㪌㩷㪻㪼㪾㪅એౝ㩷
․ᓽ㩷
㪈㪅㩷 ᮨဳᄌⷺ䈮ኻ䈚䈩৻ቯ 䊙䉾䊊ᢙᓮ㩷
㪉㪅㩷 ᮨဳ৻ቯᆫⷺ䈮ኻ䈚 䈩䊙䉾䊊ᢙ䉴䉟䊷䊒น⢻㩷
䉣䉳䉢䉪䉺૬↪䈮䉋䉍㩷 ૐᆎേน⢻㩷
小型無人超音速飛行機の機体形状,および設計コンセプトについては,本書「小型無人超音速機 の空力特性に関する研究」 , 「小型無人超音速飛行機の風洞試験用機体模型の設計製作」を参照さ れたい.
3
試験方法と試験項目
本風洞試験では,上述の
K型機体模型,M 型機体模型,O 型機体模型を供試体として,それら に作用する空気力を測定した.空気力の測定にはφ25 mm の
6分力内装天秤(図
3)を使用し,今回の試験では特に遷音速域と超音速域の空気力データを重点的に取得した.測定項目としては,
機体模型に作用する空気力(6 分力,図
4参照) ,測定室の空気の状態量(全温,全圧,静圧) , 機体模型の姿勢角(迎角,ヨー角,バンク角) ,機体模型のベース部(図
5)の圧力(4点)を設 けた(表
4).
本風洞試験における通風条件を表
5〜表8に示す.表
5と表
6は
K型機体模型を用いた試験の 通風条件,表
7は
M型機体模型を用いた試験の通風条件,表
8は
O型機体模型を用いた試験の通 風条件である.測定室の全圧
Ptは遷音速風洞では
1.5 atm,超音速風洞では2.0 atm(一部2.2 atm)とした.K 型機体模型を用いた通風試験のマッハ数は亜音速飛行形態で
0.3〜1.1,超音速飛行形態で
0.7〜1.3とし,
M型機体模型については
0.3〜2.0,O型機体模型については
0.3〜1.5とした.
全機体模型に関して,亜音速域の通風試験における迎角範囲は-2〜14 deg.程度,遷音速域/超音 速域の通風試験における迎角範囲は-2〜6 deg.程度とした.横力特性試験におけるヨー角範囲は-2
〜2 deg.とした.また,全試験を通してシュリーレン映像を撮影した.
K
型機体模型に関しては,カナードの舵角の効果を調べるための通風試験を,M 型機体模型に
関してはエンジン内の抗力を測定するための通風試験を実施した (表
5,表
6,表
7,表
8を参照) .
表4 風洞試験における測定項目.
ⓨ᳇ജ䋨㪍 ಽജ䋩㩷
ゲജ㪝㪯㩷㪃㩷㫂㪾㩷 ゲജ㪝㪰㩷㪃㩷㫂㪾㩷 ゲജ㪝㪱㩷㪃㩷㫂㪾㩷 䊝䊷䊜䊮䊃㪤㪯㩷㪃㩷㫂㪾㫄㩷 䊝䊷䊜䊮䊃㪤㪰㩷㪃㩷㫂㪾㫄㩷 䊝䊷䊜䊮䊃㪤㪱㩷㪃㩷㫂㪾㫄㩷
ⓨ᳇䈱⁁ᘒ㊂㩷
᷹ቯቶ䈱ో᷷㩷㪫㫋㩷㪃㩷㪢㩷
᷹ቯቶ䈱ో㩷㪧㫋㩷㪃㩷㫂㪧㪸㩷
᷹ቯቶ䈱㕒㩷㪧㫊㩷㪃㩷㫂㪧㪸㩷
ᮨဳ䈱ᆫⷺ㩷
ㄫⷺ㩷α㩷㪃㩷㪻㪼㪾㪅㩷 䊣䊷ⷺ㩷β㩷㪃㩷㪻㪼㪾㪅㩷 䊨䊷䊦ⷺ㩷γ㩷㪃㩷㪻㪼㪾㪅㩷
ᯏᮨဳ䈱䊔䊷䉴ജ㩷
䊔䊷䉴ജ 㪈㩷㪧㪹㪈㩷㪃㩷㫂㪧㪸㩷 䊔䊷䉴ജ 㪉㩷㪧㪹㪉㩷㪃㩷㫂㪧㪸㩷 䊔䊷䉴ജ 㪊㩷㪧㪹㪊㩷㪃㩷㫂㪧㪸㩷 䊔䊷䉴ജ 㪋㩷㪧㪹㪋㩷㪃㩷㫂㪧㪸㩷 図3 6 分力内装天秤;機体模型
の内部に固定.
図4 機体模型に作用する6分力(内装天秤に作用する軸力).
㪝㪯㩷㪔㩷㪯 ゲᣇะ䈮↪䈜䉎ゲജ 㪝㪰㩷㪔㩷㪰 ゲᣇะ䈮↪䈜䉎ゲജ 㪝㪱㩷㪔㩷㪱 ゲᣇะ䈮↪䈜䉎ゲജ 㪤㪯㩷㪔㩷㪯 ゲ䉁䉒䉍䈱䊝䊷䊜䊮䊃㩷 㪤㪰㩷㪔㩷㪰 ゲ䉁䉒䉍䈱䊝䊷䊜䊮䊃㩷 㪤㪱㩷㪔㩷㪱 ゲ䉁䉒䉍䈱䊝䊷䊜䊮䊃㩷
図5 機体模型のベース圧力測定位置(後方視点).
![図 2 K 型機体形状(K2006 機体)の概観図(KL 形態,後退角 30deg./KH 形態,後退角 56deg.) .2 小型無人超音速機の空力設計 小型無人超音速機の第2次機体設計案として,以下の3つの機体形状を設計した.これらの機体形状の空力設計においては,空力推算ツールのDATCOM[2],[3]等を利用し,翼形状に関するパラメトリックスタディ等を実施した. (1) 機体設計案1:K型機体形状(可変後退翼式) 九州大学と室蘭工業大学の共同により,K型機体形状の第1次形状(K2005機体)[4]](https://thumb-ap.123doks.com/thumbv2/123deta/6899081.2257345/7.892.238.658.500.774/Kとしてこれらツールに関するパラメトリックスタディにより.webp)

![図 4 風洞試験結果 1:K 型機体の基礎空力特性とシュリーレン可視化結果 (気流のレイノルズ数:7.5×10 5 〜2.15×10 6 ,主翼 MAC 基準) . (c) シュリーレン映像(Mach 1.1,迎角0 deg.)(左:KH形態,右:KL 形態) .‑0.16‑0.12‑0.08‑0.040.000.040.080.120.16 1086420‑2‑4‑6ALPHA [deg.]](https://thumb-ap.123doks.com/thumbv2/123deta/6899081.2257345/11.892.167.688.124.570/風洞試験結果型機体シュリーレンレイノルズシュリーレン.webp)