平成
30
年度(2018
年度) 学位論文(修士)Pulsed Plasma Thruster の超小型衛星におけ る姿勢制御用アクチュエータとしての活用
Utilizing Pulsed Plasma Thruster as a attitude control actuator in microsatellite
首都大学東京大学院
システムデザイン研究科 システムデザイン専攻 航空宇宙システム工学域 博士前期課程
学修番号 17891529 氏名 森本 明浩 指導教員 佐原 宏典 教授
平成 31年(2019年)1月25 日
摘要
本論文では,Pulsed Plasma Thruster(PPT)を超小型衛星の姿勢制御用アクチュエータとして用い,高 精度姿勢制御手法の検討を姿勢制御シミュレータにより行う.PPTによる超小型衛星の制御の具体的な 検証を行うために,本研究室で開発を行っている超小型衛星“ORBIS”のモデルを用いて姿勢制御手法の 確立を目指す.
まず初めに人工衛星における一般的な制御系の制御フローを示し,本研究で用いたセンサのパラメー タや人工衛星のモデルを示す.次に姿勢制御シミュレータの軌道上での衛星の姿勢,位置,速度の算出 方法を説明し,軌道上での環境モデルを数学モデルから算出し,軌道上での姿勢の乱れの要因となる環 境外乱の妥当性の検討を行った.その後,PPTでの制御アルゴリズムを提案し,そのアルゴリズムを姿 勢制御シミュレータに実装,PPTにより高精度姿勢制御を達成し得ることを検証し,その制御精度の評 価を行う.また,超小型衛星の電力の制約やミッションの運用期間を考慮し,高精度姿勢制御を達成し 得るPPTのパラメータ要求を抽出する.さらにPPTの特性を踏まえ,超小型衛星とPPTの制約双方を 満足し高精度姿勢制御を達成する運用方法を提案し,その評価を行った.
目次
第 1 章 序論 1
1. 1 背景 ... 1
1. 2 目的 ... 2
第 2 章 人工衛星の姿勢制御 3 2. 1 人工衛星のシステム構成 ... 3
2. 2 姿勢決定系 ... 4
2. 2. 1 姿勢決定センサ ... 4
2. 2. 2 姿勢決定アルゴリズム ... 5
2. 3 姿勢制御系 ... 6
2. 3. 1 姿勢制御用アクチュエータ ... 6
2. 3. 2 姿勢制御アルゴリズム ... 8
第 3 章 姿勢制御シミュレータ 10 3. 1 人工衛星のダイナミクス ... 11
3. 1. 1 衛星モデル ... 11
3. 1. 2 座標系の定義 ... 11
3. 1. 3 姿勢表現 ... 12
3. 1. 4 衛星のキネマティクス方程式 ... 14
3. 1. 5 衛星のダイナミクス方程式 ... 14
3. 1. 6 姿勢角の算出 ... 15
3. 2 軌道計算 ... 15
3. 2. 1 TLE ... 15
3. 2. 2 SGP4 ... 16
3. 3 環境モデル ... 17
3. 3. 1 大気モデル ... 17
3. 3. 2 地球磁場モデル ... 18
3. 3. 3 蝕判定 ... 19
3. 4 環境外乱 ... 21
3. 4. 1 大気抵抗トルク ... 21
3. 4. 2 残留磁気トルク ... 22
3. 4. 3 重力傾斜トルク ... 23
3. 4. 4 太陽輻射圧トルク ... 24
3. 4. 5 環境外乱トルク ... 25
第 4 章 姿勢決定・制御 28 4. 1 理学観測衛星の姿勢制御系への要求 ... 28
4. 2 ノイズを考慮したセンサモデル ... 28
4. 2. 1 恒星センサ(STT) ... 28
4. 4 Pulsed Plasma Thruster駆動アルゴリズム ... 33
4. 5 Pulsed Plasma Thrusterによる衛星の3軸姿勢制御シミュレーション ... 35
4. 5. 1 環境外乱による衛星の姿勢変動... 36
4. 5. 2 Pulsed Plasma Thrusterによる3軸姿勢制御 ... 36
第 5 章 超小型衛星のPulsed Plasma Thrusterによる姿勢制御 39 5. 1 Pulsed Plasma Thrusterへのシステム要求の抽出 ... 39
5. 2 実現性を踏まえた運用方法の提案 ... 44
5. 3 今後の課題 ... 47
第 6 章 結論 48 6. 1 まとめ ... 48
参考文献 49
図目次
図 1.1 姿勢制御系システム構成図 ... 2
図 2.1人工衛星システム構成図7) ... 3
図 2.2 姿勢決定センサ7) ... 4
図 2.3 AxelStar-3外観9) ... 5
図 2.4 CHR02-025外観10) ... 5
図 2.5 カルマンフィルタ8) ... 6
図 2.6姿勢制御アクチュエータ8) ... 7
図 2.7 Pulsed Plasma Thrusterの推力発生メカニズム11) ... 8
図 2.8姿勢制御系ブロック線図 ... 9
図 3.1姿勢シミュレータ概略図 ... 10
図 3.2 ORBIS外観...11
図 3.3 座標系の定義 ... 12
図 3.4 環境外乱モデルフローチャート... 17
図 3.5波長10.7cm当たりの電波流速 ... 17
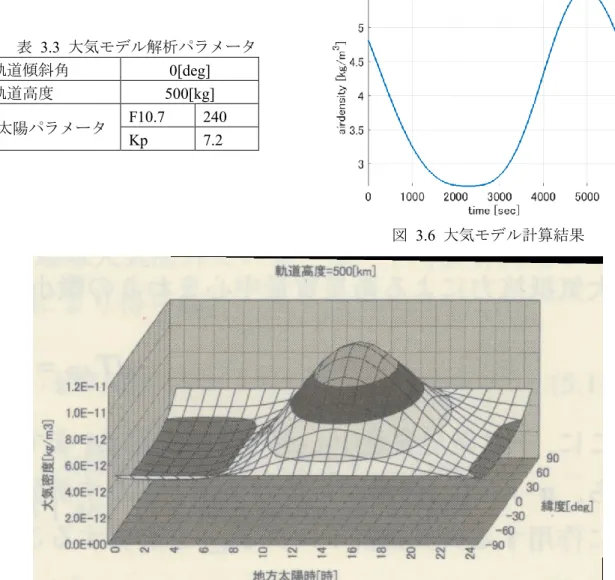
図 3.6 大気モデル計算結果 ... 18
図 3.7 高度500kmにおける大気密度8) ... 18
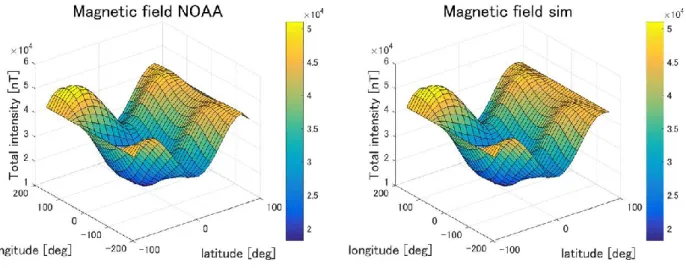
図 3.8 地磁場計算結果(左:NOAA,右:本シミュレータ) ... 19
図 3.9 蝕模式図 ... 20
図 3.10 高度550kmにおける大気抵抗トルク ... 21
図 3.11 高度550kmにおける残留磁気トルク ... 22
図 3.12 高度550kmにおける重力傾斜トルク ... 23
図 3.13 高度550㎞における太陽輻射圧トルク ... 25
図 3.14 高度550kmにおける環境外乱トルク ... 25
図 3.15 500kg級衛星に作用する環境外乱トルク8) ... 26
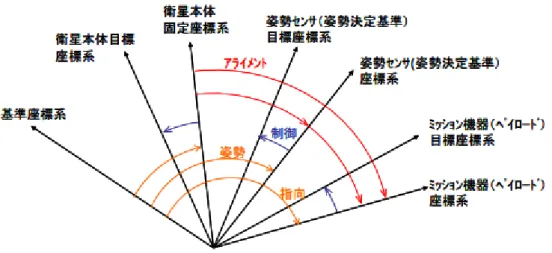
図 4.1 主要座標系間の関係18) ... 28
図 4.2 STTによる姿勢決定精度(ピッチ/ヨー) ... 30
図 4.3 STTによる姿勢決定精度(ロール) ... 30
図 4.4 PPT出力例(𝑛𝑚𝑎𝑥 = 10) ... 34
図 4.5 PPT制御モデル ... 35
図 4.6 TMU-PPT-5P外観11) ... 35
図 4.7 環境外乱による姿勢変動(左:姿勢角,右:姿勢角速度) ... 36
図 4.8 PPT搭載位置 ... 36
図 4.9 PPTの1放電の出力 ... 36
図 4.10姿勢指向精度の時間分布と確率密度関数(𝑛𝑚𝑎𝑥 = 9,𝐼𝑏𝑖𝑡 = 48.2[μNs]) ... 38
図 4.11姿勢安定度の時間分布と確率密度関数𝑛𝑚𝑎𝑥 = 9,𝐼𝑏𝑖𝑡 = 48.2[μNs]) ... 38
図 5.1 軌道1周分の各サブシステムの消費電力 ... 40
図 5.2 最大放電回数𝑛𝑚𝑎𝑥と指向精度の関係 ... 41
図 5.3 最大放電回数𝑛𝑚𝑎𝑥と姿勢安定度の関係 ... 41
図 5.4姿勢指向精度の時間分布と確率密度関数(𝑛𝑚𝑎𝑥 = 4,𝐼𝑏𝑖𝑡 = 24.1[μNs]) ... 42
図 5.7姿勢安定度の時間分布と確率密度関数(𝑛𝑚𝑎𝑥 = 4,𝐼𝑏𝑖𝑡 = 32.13[μNs],閾値0.00001) .... 46
表目次
表 1.1 人工衛星の姿勢制御精度の例1), 2), 3), 4),5) ... 1
表 2.1 AxelStar-3諸元9) ... 5
表 2.2 CHR02-025諸元10) ... 5
表 3.1 ORBSI諸元...11
表 3.2 超小型衛星ORBIS想定軌道 ... 15
表 3.3 大気モデル解析パラメータ ... 18
表 3.4 高度550kmにおける環境外乱トルクのオーダー... 26
表 4.1 最適制御パラメータ ... 33
表 4.2 TMU-PPT-5P諸元11) ... 35
表 4.3 PPTの発生するトルク... 37
表 4.4 スケーリングパラメータ,形状パラメータ(𝑛𝑚𝑎𝑥 = 9,𝐼𝑏𝑖𝑡 = 48.2[μNs]) ... 38
表 5.1 発電力計算パラメータ21) ... 39
表 5.2 各サブシステムの使用機器と消費電力 ... 40
表 5.3 𝐼𝑏𝑖𝑡を変化させた場合の総放電回数,指向精度及び安定度(𝑛𝑚𝑎𝑥 = 4) ... 42
表 5.4 スケーリングパラメータ,形状パラメータ(𝑛𝑚𝑎𝑥 = 4,𝐼𝑏𝑖𝑡 = 24.1[μNs]) ... 43
表 5.5 PPT放電回数(𝑛𝑚𝑎𝑥 = 4,𝐼𝑏𝑖𝑡=24.1[𝜇𝑁𝑠])... 43
表 5.6 高精度姿勢制御達成のためのPPTへのシステム要求 ... 44
表 5.7 閾値と総放電回数(𝑛𝑚𝑎𝑥 = 4) ... 45
表 5.8 各PPTの放電回数(𝑛𝑚𝑎𝑥 = 4,𝐼𝑏𝑖𝑡 = 32.13[𝜇𝑁𝑠],閾値0.00001) ... 46
表 5.9 RWと併用し高精度姿勢制御を達成するためのシステム要求... 47
第 1 章 序論
1. 1 背景
1950年代に世界初の人工衛星が打ち上げられて以降,地球観測衛星を始めとして様々な用途の人工衛 星が打ち上げられ,生命の起源の解明,地上における我々の生活の向上などいろいろな場面で貢献して いる.そのような人工衛星であるが,限られた打ち上げ機会の有効活用のために機能充実化が行われ,
人工衛星の大型化が進む一方で2000年代に入り超小型衛星と呼ばれる質量 100kg 以下の人工衛星が大 学をはじめとする各研究機関における研究が盛んにおこなわれるようになった.超小型衛星は,大型人 工衛星と比べて低コストで短期開発が可能というメリットがある他,1 つのミッションへ専念できる専 有性を持っている.その性質から新たな技術実証の場として用いられることに加えて,近年では天体観 測や地球観測など理学観測の場としての利用も期待されている.理学観測衛星では多くの場合,観測対 象を捉えるために人工衛星の姿勢を高精度に制御することが求められる.一方で,超小型衛星では電力 の確保等の制約があるため,少ない電力で高精度な姿勢制御を達成することが要求される.表1.1にこ れまでの大型衛星,小型衛星で達成,もしくは要求されている姿勢指向精度及び安定度を示す.
表 1.1 人工衛星の姿勢制御精度の例1), 2), 3), 4),5)
衛星名 質量[kg] 開発機関 打上年 指向精度[deg] 姿勢安定度[arcsec/sec]
れいめい 60 JAXA 2005 0.05 14.4
ひので 900 JAXA 2006 - 0.002
きく8号 2,800 JAXA 2006 0.05 -
ほどよし3号 60 東京大学 2014 0.5 -
ひさき 35 JAXA,他 2013 0.025
Nano-JASMINE 35 東京大学,他 未定 0.05 0.72
CIBER-2/EXZIT 複数 JAXA,他 未定 0.1 0.06
宇宙赤外線背景放射 50 JAXA,他 未定 0.1 0.1
ORBIS 50 首都大学東京,他 未定 0.1 -
GEO-X 300 首都大学東京,他 未定 0.01 1
HiZ-GUNDAM 400 JAXA 未定 0.02 10
通常,人工衛星の姿勢制御系は内界センサ,外界センサを用いて現在の姿勢を決定する姿勢決定系と アクチュエータを用いて所望する姿勢に制御する姿勢制御系に分かれている.各系の詳細な説明は次節 で行う.現在の超小型衛星の姿勢制御系のシステムブロックの例を図1.1に示す.
一般的に超小型衛星において高精度な姿勢制御が求められる場合,姿勢制御アクチュエータとしてリ アクションホイール(以下 RW)が使用されている.RW はきめ細やかな制御が可能であり,非常に高 精度な制御が可能である.しかし,消費電力が大きく,比較的高価であること,稼働による角運動量の 蓄積により飽和した際には他のアクチュエータによるアンローディングが必要となる等運用上の制約 が多い.そこで本研究では姿勢制御アクチュエータに RW を用いるのではなく電気推進の一つである
Pulsed Plasma Thruster(以下PPT)を用いて超小型衛星の姿勢制御を行うことを提案する.PPTは低コス
トかつ低電力での運用が可能であり,任意の時間間隔で微小推力を発生させることが出来る.このPPT
型衛星でしか成しえなかったミッション,大型衛星では成しえなかったミッションが可能となり更なる 宇宙利用の拡大と発展につながると期待される.
関連研究では2016年に興津によりPulsed Plasma Thrusterを用いた超小型衛星の高精度姿勢制御につ いて研究が行われており,その際の結果ではPPTを用いて超小型衛星の姿勢制御を行うことにより指向 精度についてはRWと同等程度,安定度についてはRWより劣るという結果が得られている.また,PPT へのシステム要求も抽出しており,その中の作動保証回数は1,141,050,973回の噴射が求められている6). しかしながらPPTは動作原理の都合上約1000万回の噴射が上限であり,約11.5億回の噴射は不可能で あるという結果が得られている.以上を踏まえPPTによる姿勢制御性能の向上と超小型衛星の制約だけ でなくPPTの制約も踏まえた運用方法が求められている.
1. 2 目的
本論文では,Pulsed Plasma Thrusterの超小型衛星における姿勢制御用アクチュエータとしての活用と して,以下を目的とする.
PPTを姿勢制御用アクチュエータとして使用し,前研究で達成しえなかった姿勢安定度の向上と指 向精度の更なる向上をすること.
超小型衛星に搭載することを想定し,電力等の制約を踏まえたうえで高精度姿勢制御を達成するた めのPPTのシステム要求を提案すること.
超小型衛星の制約だけでなくPPTの制約も踏まえたうえで実現可能な運用方法を提案し,それを達 成するためにPPTのシステム要求を提案すること.
なお,超小型衛星に搭載することを想定し衛星固有のパラメータを含む具体的な検証を行うために本 論文における PPT の搭載対象は本研究室で開発を行っている超小型衛星“ORBIS”を前提としている.
ORBISに関する詳細は第2章及び第3章に記載する.
図 1.1 姿勢制御系システム構成図
第 2 章 人工衛星の姿勢制御
本章では,人工衛星のシステム及び姿勢の制御方法についてを示す.
2. 1 人工衛星のシステム構成
人工衛星のシステム構成としては電力,通信,姿勢制御等,人工衛星の基本的な機能として必要なバ ス機器.そして通信,地球観測や科学データの収集などの人工衛星ごとのミッションのために必要なミ ッション機器の2つから構成されている.人工衛星のシステム構成の1例を図2.1に示す7).
バス部には,様々な役割を担うサブシステムが存在し,例えばバッテリや太陽電池等を用いて電力収支 を管理するサブシステムを電源系,通信機器を用いて地上とのコマンドの送受信を行うサブシステムを 通信系と呼ぶ.姿勢制御を行うサブシステムは姿勢系と呼ばれ,姿勢系は姿勢決定系と姿勢制御系の 2
図 2.1人工衛星システム構成図7)
節に姿勢決定系で用いられるセンサ及びアルゴリズム,姿勢制御系で用いられるアクチュエータやその アルゴルズムを紹介するとともに,本研究において用いたセンサやアクチュエータ,姿勢決定・制御ア ルゴリズムについて述べる.
2. 2 姿勢決定系
2. 2. 1 姿勢決定センサ
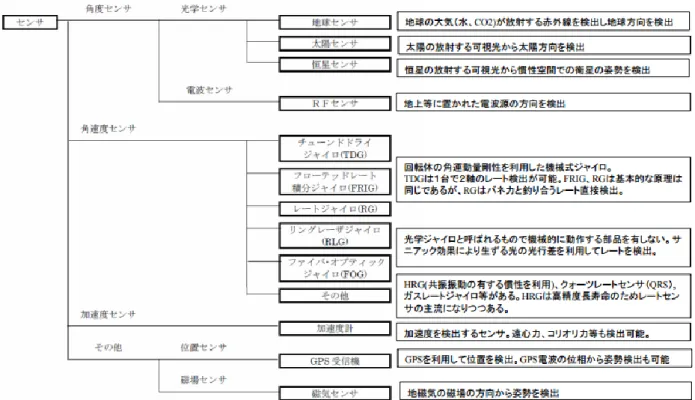
姿勢決定に用いられるセンサは外界センサと内界センサの2つの種類に分類される.外界センサは地 球や恒星といった人工衛星外部の環境を測定し,基準方向に対する衛星の姿勢を検出するものであるが,
外界センサは蝕の間計測できない期間があり,観測データの取得には数秒から数十秒の時間間隔を要す る.その間の姿勢決定を補完し,精度を高めるために内界センサを用いて衛星の角速度等のパラメータ を計測し,時間経過による姿勢の変化を検出する.図2.2に人工衛星において用いられる姿勢決定セン サの例を示す7).
姿勢決定センサには数多くの種類が存在するが,本研究において姿勢角の検出は,高精度な姿勢決定 が必要な場合に多く用いられている恒星センサ(STT)を用いる.角速度の検出には,理学観測などの 高精度な姿勢検出が必要な衛星には,光ファイバジャイロ(FOG:Fiber Optical Gyro)が用いられるこ とが多いが,1軸あたり100万円オーダーと機械式ジャイロに比べて高価であり,比較的消費電力も大 きいという超小型衛星には適さない欠点があることに加えて,更に温度変化により計測誤差が生じると いった欠点もある.そこで本研究では,MEMS(Micro Electro Mechanical Systems)ジャイロを用いるこ とを想定している.ここ数十年間において半導体微細加工技術の発達により,電子回路やセンサなどを シリコンチップ上に制作することが可能となってきた.この技術を MEMS と呼び,それを利用して製 作されたジャイロをMEMSジャイロと呼ぶ.近年MEMS技術の発達や検出器の性能向上により,FOG に匹敵するMEMSジャイロが開発されるようになってきた.加えて3軸で10万円オーダーとFOGに
図 2.2 姿勢決定センサ7)
比べて非常に低価格であり,小型で温度制御が不要であるなど精度以外の面において MEMS ジャイロ の優位性は明らかなものとなっている.
表2.1及び図2.3に本研究で用いたAxelSpace社製の恒星センサであるAxelStar-3の諸元と外観を,表 2.2及び図2.4にシリコンセンシング社製のMEMSジャイロであるCRH02-025の諸元と外観を示す.
表 2.1 AxelStar-3諸元9) 精度
n
ピッチ/ヨー 7[arcsec](3σ)
ロール 77[arcsec](3σ)
視野角 8[deg]×8[deg]
更新周期 1,0.5,0.2[Hz]
太陽除外角(ロングフード) 35[deg]
質量(ロングフード) 516[g]
寸法(ロングフード) 150×80×75[mm]
消費電力 3.0[W](typ.)
動作温度 -20~50[℃]
表 2.2 CHR02-025諸元10)
ランダムノイズ 2.26e-3[rad/√sec]
ランダムウォークノイズ 5e-7[rad/(√sec2)]
質量 45[g]
寸法 33×33×25.4[mm]
消費電力 0.3[W]
s計測範囲 ±25[deg/sec]
2. 2. 2 姿勢決定アルゴリズム
高精度姿勢決定が要求される理学衛星では恒星センサとジャイロセンサを用いた姿勢決定が一般的 であるが,STT及びジャイロの出力にはランダムノイズやバイアス,ドリフトといったノイズが含まれ る.高精度姿勢決定を行うためにはセンサの出力からこれらのノイズを取り除き真の値を推定する必要 がある.そこでよく用いられる姿勢決定アルゴリズムとして,カルマンフィルタがある.
カルマンフィルタは1960年代にR. E. Kalmanによって提唱された状態推定アルゴリズムである.時 系列的な変化をするデータ履歴から次に取りうる値を予測するフィルタであり,姿勢伝搬と観測更新と いう2つの処理から構成される.姿勢伝搬は現在の姿勢とジャイロの角速度によって次の姿勢を予測す る処理のことであるが,ジャイロが示す角速度にはランダムなノイズが含まれており,これが推定値の 誤差として蓄積される.その誤差をSTTの観測値によって修正する処理が観測更新である.これらの姿 勢伝搬と観測更新を繰返すことで姿勢推定制度を高めるものである.図2.5にカルマンフィルタによる 処理のアルゴリズムを示す.
図 2.3 AxelStar-3外観9)
図 2.4 CHR02-025外観10)
2. 3 姿勢制御系
2. 3. 1 姿勢制御用アクチュエータ
姿勢制御に用いられるアクチュエータは,衛星本体と角運動量を交換することを通して,角運動量の 時間変化率としてトルクを発生させる内力アクチュエータと,外力としてトルクを発生させる外力アク チュエータの2つに大別される.内力アクチュエータの例としては,衛星構体に固定されたホイールを 有するモーメンタムホイールやリアクションホイール,ジンバル機構により角運動量ベクトルの発生方 向を変化させることが出来るコントロールモーメンタムジャイロ(CMG)などが挙げられる.また,外 力アクチュエータには燃料の放出によりトルクを発生させるスラスタや,衛星の周囲の場との相互作用 を利用する磁気トルカやロッドなどがある.図2.6に代表的なアクチュエータの例を示す.
図 2.5 カルマンフィルタ8)
従来,高精度な姿勢制御が要求される衛星には,内力アクチュエータの一つであるRWが広く用いら れてきた.しかし1.1 節で述べたようにRWは消費電力が大きく,比較的高価であること,角運動量が 飽和した際に他のアクチュエータによるアンローディングが必要といった運用上の制約もある.そこで 本研究ではRWではなく外力アクチュエータであり,電気推進の一つであるPulsed Plasma Thruster(PPT)
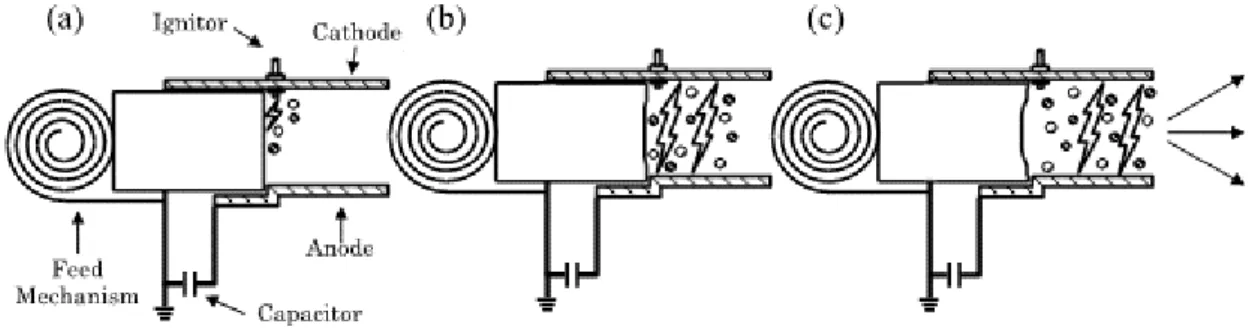
を用いて人工衛星の姿勢制御を行い,その際の制御性能の向上を目的の一つとしている.図2.7にPPT の推力発生メカニズムを示すとともに以下に説明する.
PPTは主に,2枚の電極(アノード及びカソード),固体プロペラント,プロペラント用のフィード機 構,点火装置としてのイグナイタ,主放電エネルギー充電用のコンデンサ,イグナイタ用パルス電源,
主放電電源のみで構成されており,構造が非常に簡易であるという特徴がある.
1) イグナイタにより印加された高電圧の火花放電が少量の固体,または液体のプロペラントを昇華 させ,その一部をプラズマ化させる(図2.7(a)).
2) 一部のプロペラントの昇華により生じたプラズマは,アノード・カソードの両電極間に広がり,
高導電性の領域を作る.この領域により両電極間が短絡され,両電極間につながれたキャパシタ 内の電荷が一斉に流れ,主放電が形成される(図2.7(b)).
3) この手法電による電流成分はジュール加熱によってプロペラントにエネルギーを与え昇華させ る.消化したプロペラントは,高温気体の膨張による空気力学的加速を受け,一部は電離してプ ラズマとなり,主放電電流とその自己誘起磁場が作るローレンツ力による電磁的加速を受ける
(図2.7(c))
4) 電磁気的・空気力学的加速を受けたプラズマは,下流方向に加速され,その放電領域を広げつつ,
スラスタ外へ排出される.
5) 消費量と同量のプロペラントがフィード機構によって自動的に供給され,新たな放電チャンネル を形成する.
以上のサイクルを1ショットとし,任意の時間間隔で駆動して推力を発生することができる.1サイ クルとなる主放電は数10μsecの減衰振動波形を示す.
本研究では,このPPTを用いることにより,超小型衛星の高精度姿勢制御の実現を目指す.
図 2.6姿勢制御アクチュエータ8)
2. 3. 2 姿勢制御アルゴリズム
ここでは,人工衛星の姿勢制御アルゴリズムについて説明する.モーメンタムホイールのバイアス角 運動量の変化により1軸を制御し,他の軸はジャイロ効果によって安定化を図る制御方式をバイアスモ ーメンタム方式と呼ぶのに対して,複数のアクチュエータを用いてロール軸(x軸),ピッチ軸(y軸),
ヨー軸(z 軸)を独立に制御する方式をゼロモーメンタム方式と呼ぶ.本研究の場合スラスタを制御用 アクチュエータとして用いており,3 軸独立して制御する必要があるため,制御方式としてゼロモーメ ンタム方式を用いる.以下にゼロモーメンタム方式の制御アルゴリズムについて述べる.なお,座標系 の定義やダイナミクスに関しては第3章で説明を行う.
衛星の姿勢角を[𝛷 𝜃 𝜓]𝑇,軌道レートを𝜔0,主慣性モーメントを[𝐼𝑥 𝐼𝑦 𝐼𝑧],スラスタにより生 じるトルクを[𝑇𝑐𝑥 𝑇𝑐𝑦 𝑇𝑐𝑧]𝑇,環境外乱トルクを[𝜏𝑥 𝜏𝑦 𝜏𝑧]𝑇とする.衛星が定常状態にあり姿勢角の 変動が微小であると仮定し,運動方程式を線形化すると次式のように示される8).
[
𝐼𝑥𝛷̈ 𝐼𝑦𝜃̈ 𝐼𝑧𝜓̈
] + [
𝜔02(𝐼𝑦−𝐼𝑧)𝛷
0
𝜔02(𝐼𝑦−𝐼𝑥)𝜓
] + [
𝜔0(𝐼𝑦−𝐼𝑧−𝐼𝑥)𝜓̇
0
𝜔0(𝐼𝑦−𝐼𝑥− 𝐼𝑧)𝛷̇
] + [ 0 0 0 ]
= [
−3𝜔02(𝐼𝑦−𝐼𝑧)𝛷
−3𝜔02(𝐼𝑥−𝐼𝑧)𝛷
0
] + [
𝜏𝑥 𝜏𝑦 𝜏𝑧] + [
𝑇𝑐𝑥 𝑇𝑐𝑦 𝑇𝑐𝑧
]
(2.1)
軌道レートを微小として無視すると式(2.1)は次式のように表される.
[
𝐼𝑥𝛷̈ 𝐼𝑦𝜃̈ 𝐼𝑧𝜓̈
] = [
𝜏𝑥 𝜏𝑦 𝜏𝑧] + [
𝑇𝑐𝑥 𝑇𝑐𝑦 𝑇𝑐𝑧
] (2.2)
バイアスモーメンタム方式では,ロール軸とヨー軸のカップリングがあり,互いに干渉しあうが,ゼ ロモーメンタム方式では式(2.2)に示すようにカップリング項及び,重力傾斜トルクが無視できるとする と,各軸を独立して設計,制御することが可能である.更にゼロモーメンタム方式は3軸が同一の式の 形で表されているため,1軸周りに注目して設計を進めることができる.例としてロール軸に注目し,
その運動方程式を抽出すると次式で表される.
𝐼𝑥𝛷̈ =𝜏𝑥+𝑇𝑐𝑥 (2.3)
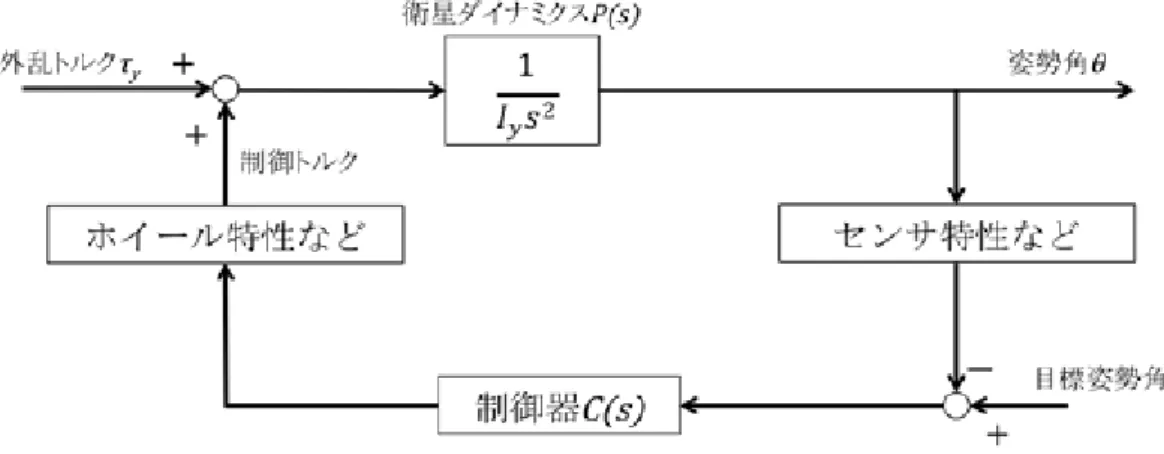
式(2.3)が衛星のダイナミクスであり,姿勢制御系は姿勢決定系が推定する姿勢角をフィードバックし,
所望の姿勢に制御するために必要なトルクの算出を行う.図2.8に姿勢制御系のブロック線図を示す.
図 2.7 Pulsed Plasma Thrusterの推力発生メカニズム11)
図 2.8姿勢制御系ブロック線図
第 3 章 姿勢制御シミュレータ
本研究ではPPTをアクチュエータとして用いた超小型衛星の姿勢制御の検証をMATLAB/Simulink®を 用いて開発した姿勢シミュレータを用いて行う.姿勢シミュレータとは,軌道上での姿勢の決定及び制 御を模擬するシミュレータであり,任意の軌道上,開始時刻からの軌道上の環境外乱を考慮し,衛星ダ イナミクスから算出した姿勢角を姿勢決定センサの値からフィルタリングし,姿勢決定を行い,RW な どのアクチュエータを用いて姿勢制御を模擬するものとなっている.これを用いることにより,軌道パ ラメータを任意の値に設定することで様々な軌道上外乱やその軌道における衛星の姿勢変化,消費電力 の時間履歴を求めることが可能となる.
このシミュレータは環境モデル,衛星ダイナミクスモデル,センサモデル,姿勢決定・制御アルゴリ ズム,アクチュエータモデルから構成され,環境モデルと衛星ダイナミクスのブロックにより,環境外 乱から衛星の真の姿勢情報を得ることができる.実際に運用される衛星では真の姿勢情報ではなく,セ ンサによって観測された値から得られる推定値を利用するため真の姿勢情報を取得するセンサを模擬 したセンサモデルを組み込み,それらのノイズやバイアス,ドリフトといった雑音情報を真の姿勢情報 に付加しセンサの値を模擬している.この値を用いて姿勢決定アルゴリズムにおいて衛星の姿勢情報の 推定を行っている.姿勢制御アルゴリズムでは,姿勢決定アルゴリズムにより決定した衛星の姿勢情報 の推定値から各種アクチュエータへ所望の姿勢へ制御するための制御パラメータをアクチュエータモ デルへ出力し,アクチュエータモデルにおいて,本研究ではPPTを模擬したものであるが要求されたト ルクを姿勢制御アルゴリズムから送られてきたパラメータに準ずる駆動を行う.図3.1に姿勢シミュレ ータの概略図を示す.
本章では,本研究でPPTの搭載を仮定している超小型衛星ORBISの衛星モデルについて述べ,座標 系の定義ともに,衛星のダイナミクスについて説明を行う.また,姿勢変化の原因となる環境モデルに ついても述べる.
図 3.1姿勢シミュレータ概略図
3. 1 人工衛星のダイナミクス
3. 1. 1 衛星モデル
本研究では,衛星モデルとして本研究室で開発を行っている超小型衛星 ORBIS のモデルを用いてい る.いかにORBISの諸元及び外観を示す.
表 3.1 ORBSI諸元
寸法 498×498×444[mm]
(パドルサイズ:420×440[mm])
質量 50[kg]
重心*1 X:3.4,Y:6.3,Z:238.5[mm]
*1) X軸については体心から観測窓方向,Z軸は分離面基準,
Y軸については体心からX軸,Z軸の右手系正方向
慣性モーメントIは太陽電池パドル展開後の値を3DCADを用いて計算した値を用いる.
𝐼 = [
1.508 −0.0105 0.0126
−0.0105 1.4630 0.0079 0.0126 0.0079 1.3910
] [kg・m2] (3.1)
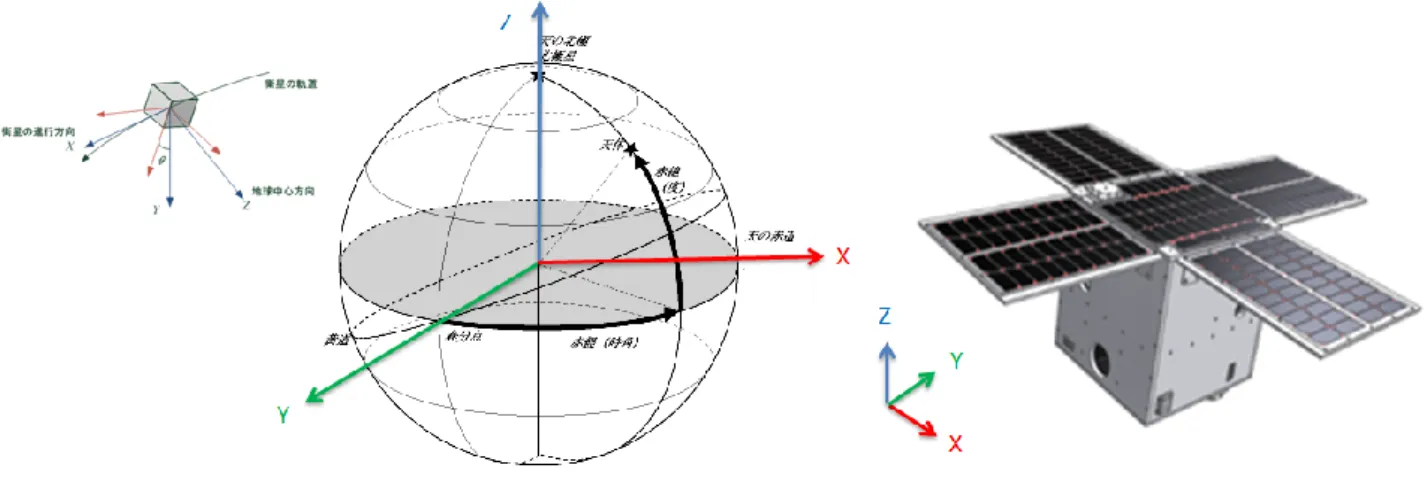
3. 1. 2 座標系の定義
軌道上での姿勢角や一の表現のために,次の3つの座標系を定義する.
1) J2000.0赤道面座標系
地球を中心とする地心慣性座標系であり,西暦2000年の春分点方向をX軸正方向,北極点方向を Z軸正方向としてX軸,Z軸を基準とした右手系座標となるようY軸を定めたもの.慣性空間にお ける衛星の軌道上における位置はこの座標系で表現される
2) 軌道座標系
軌道上の速度ベクトル方向をX軸,地球中心方向をZ軸とし,これらを基準としてY軸を定めた もの.
3) 機体座標系
機体の重心を中心とし,観測窓方向をX軸正方向,太陽電池パドル方向をZ軸正方向とし,それら を基準として右手系座標となるようY軸を定めた機体に固定された座標系.
本論文では次項より座標系の表現にJ2000.0赤道面座標系を{N}系,軌道座標系を{O}系,機体座標系 を{B}系と定義する.
図 3.2 ORBIS外観
3. 1. 3 姿勢表現
衛星の姿勢表現にはいくつかの方法があるが,ここでは代表的な方向余弦行列,オイラー角,クオー タニオン表現について説明する.
まず方向余弦行列であるが,これは任意の2つの座標系の変換を表す行列である.任意の2つの座標 系については,ここではJ2000.0赤道面座標系と機体座標系を例にして説明を行う.J2000.0赤道面座標 系の基底ベクトルを[𝒙𝒏 𝒚𝒏 𝒛𝒏],機体座標系の基底ベクトルを[𝒙𝒃 𝒚𝒃 𝒛𝒃]とすると,これら 2つの 基底ベクトルと方向余弦行列Cの関係は次式となる.ここで本論において基準座標系{N}系に対して{B}
系の方向余弦行列を𝑪𝑵𝑩と定義する.
[
𝑥𝑏 𝑦𝑏 𝑧𝑏] = [
𝐶11 𝐶12 𝐶13 𝐶21 𝐶22 𝐶23 𝐶31 𝐶33 𝐶33
] [
𝑥𝑛 𝑦𝑛
𝑧𝑛] =𝑪𝑵𝑩[
𝑥𝑛 𝑦𝑛
𝑧𝑛] (3.2)
衛星の姿勢は基準となる座標系と衛星重心座標系,ここでは機体座標系との方向余弦行列として定義 される.しかし,この行列そのものからは姿勢を直感的に把握しにくいため,オイラー角やクオータニ オンと呼ばれる姿勢表現がある.J2000.0赤道面座標系を Z軸周り,Y 軸周り,X 軸周りに回転させる と,回転後の軌道座標系は機体座標系と一致する.このときのZ軸,Y軸,X軸それぞれについての回 転角をオイラー角とし,また,これらの角度をX,Y,Zの順にΦ(ロール角),θ(ピッチ角),ψ(ヨー 角)と呼ぶ.オイラー角は回転軸の選び方と順番によって 12 通りの表現が考えられるが,特に上記の 順序で回転させるものを3-2-1系のオイラー角と呼ぶ.
方向余弦行列と3-2-1系のオイラー角との間には以下の関係が成立する.
𝑪 = [
1 0 0
0 cos𝛷 sin𝛷 0 −sin𝛷 cos𝛷
] [
cos𝜃 0 −sin𝜃
0 1 0
0 −sin𝜃 cos𝜃 ] [
cos𝜓 sin𝜓 0
−sin𝜓 cos𝜓 0
0 0 1
]
= [
cos𝜃cos𝜓 cos𝜃sin𝜓 −sin𝜃
sin𝛷sin𝜃cos𝜓 − cos𝛷sin𝜓 sin𝛷sin𝜃sin𝜓 + cos𝛷cos𝜓 sin𝛷cos𝜃 cos𝛷sin𝜃cos𝜓 + sin𝛷sin𝜓 cos𝛷sin𝜃sin𝜓 − sin𝛷cos𝜓 cos𝛷cos𝜃 ]
(3.3)
方向余弦行列と3-2-1系との関係は以下のとおりである.
図 3.3 座標系の定義
Φ =tan−1𝐶22
𝐶33 (−𝜋 ≦ 𝛷 ≦ 𝜋) θ=tan−1 𝐶13
√𝐶232+𝐶332
(−𝜋
2≦ 𝜃 ≦𝜋 2)
ψ=tan−1𝐶12
𝐶11 (−𝜋 ≦ 𝜓 ≦ 𝜋)
(3.4)
cosθ = 0のとき,すなわちθ = ±π/2のとき特異点を持ち,計算することができない.オイラー角を使用 する場合には,この特異点に留意する必要がある.
オイラー角の 3 変数で表現したときに生ずる数学的特異点を回避することができる姿勢表現として,
クオータニオン(オイラーパラメータもしくは四次元数と呼ばれることもある)が存在する.クオータ ニオンは座標系の回転がある直線周りの一つの回転とみなして表現するオイラーの定理を更に発展さ せて表現される.このときの直線をオイラー軸と呼ぶが,オイラー軸の方向単位ベクトルλを
𝛌 = 𝜆𝑥𝑒𝐵𝑥+ 𝜆𝑦𝑒𝐵𝑦+ 𝜆𝑧𝑒𝐵𝑧 (3.5) とし,この直線周りの回転角度(1直線に向きを与え,右回りを正の角度とする)をθとすると,クオ ータニオン𝐪 = [𝑞1 𝑞2 𝑞3 𝑞4]𝑇は次式で定義される.
𝑞1= 𝜆𝑥𝑠𝑖𝑛𝜃 2 𝑞2= 𝜆𝑦𝑠𝑖𝑛𝜃 2 𝑞3= 𝜆𝑧sin𝜃
2 𝑞4= cos𝜃
2
(3.6)
式(3.6)に示すようにクオータニオンは4個のパラメータを用いて定義されるが,制約条件として
𝑞12+ 𝑞22+ 𝑞32+ 𝑞42= 1 (3.7)
があるため,実質的には3個の自由度を有することとなる.また,方向余弦行列とクオータニオンには 以下の関係がある.
C = [
𝑞12− 𝑞22− 𝑞32+ 𝑞42 2(𝑞1𝑞2+ 𝑞3𝑞4) 2(𝑞1𝑞3− 𝑞2𝑞4) 2(𝑞2𝑞1− 𝑞3𝑞4) 𝑞12− 𝑞32− 𝑞12+ 𝑞42 2(𝑞2𝑞3+ 𝑞1𝑞4) 2(𝑞3𝑞1+ 𝑞2𝑞4) 2(𝑞3𝑞1− 𝑞1𝑞4) 𝑞32− 𝑞12− 𝑞22+ 𝑞42
] (3.8)
逆に方向余弦行列からクオータニオンを求める際にはまず式(3.7)の制約条件から方向余弦行列の対 角項を用いてクオータニオンの1変数を算出し,その求めた1変数を用いて残りの変数を求める.1例 として対角項から𝑞4を求めた際の関係を示す12)
𝑞1=1
2√1 + 𝐶11+ 𝐶22+ 𝐶33 𝑞2= 1
4𝑞4(𝐶23− 𝐶32) 𝑞3= 1
4𝑞4(𝐶31− 𝐶13) 𝑞4= 1
4𝑞4
(𝐶12− 𝐶21)
(3.6)
3. 1. 4 衛星のキネマティクス方程式
衛星の角速度ベクトルをω = [𝜔𝑥 𝜔𝑦 𝜔𝑧]𝑇とすると,角速度ベクトルωとクオータニオンqの間には 次式の関係が成立する.
𝑑 𝑑𝑡𝒒̂ =1
2𝛀(𝛚)𝒒̂
=1 2[
−𝑞1𝜔𝑥− 𝑞2𝜔𝑦− 𝑞3𝜔𝑧 𝑞4𝜔𝑥− 𝑞3𝜔𝑦+ 𝑞2𝜔𝑧 𝑞3𝜔𝑥+ 𝑞4𝜔𝑦− 𝑞1𝜔𝑧
−𝑞2𝜔𝑥+ 𝑞1𝜔𝑦− 𝑞4𝜔𝑧
]
(3.10)
ここで,𝒒̂及び 𝛀(𝛚)は次式で定義される
𝒒̂ = [𝑞4 𝑞1 𝑞3 𝑞3]𝑇 (3.11)
𝛀(𝛚) = [ 0 −𝝎𝑻 𝝎 −𝝎̃]
=[
0 −𝜔𝑥 𝜔𝑥 0
−𝜔𝑦 −𝜔𝑧
𝜔𝑧 −𝜔𝑦 𝜔𝑦 −𝜔𝑧
𝜔𝑧 𝜔𝑦 0 𝜔𝑥
−𝜔𝑥 0
] (3.12)
式(3.12)をキネマティクス(運動学)方程式と呼ぶ.ここで𝝎̃は以下の式で定義される12).
𝝎̃ = [
0 −𝜔𝑧 𝜔𝑦 𝜔𝑧 0 −𝜔𝑥
−𝜔𝑦 𝜔𝑥 0
] (3.13)
3. 1. 5 衛星のダイナミクス方程式
衛星に作用するトルクを𝝉 = [𝜏𝑥 𝜏𝑦 𝜏𝑧]𝑇,慣性モーメントをIとすると,トルクτによって衛星 に生じる角速度は次式を解くことにより求められる.
𝑰𝝎̇ + 𝝎̃ 𝑰𝝎 = 𝝉 (3.14)
式(3.14)をダイナミクス(動力学)方程式と呼ぶ12).
3. 1. 6 姿勢角の算出
本研究で用いたシミュレータでは式(3.14)のダイナミクス方程式から入力されるトルク τ を用いて衛 星の角速度ωを算出しており,その角速度ωをもとに,式(3.10)のキネマティクス方程式からクオータ ニオンを算出している.算出したクオータニオンを式(3.4),(3.8)を用いて方向余弦行列やオイラー角に 適宜変換し,用いている.
3. 2 軌道計算
人工衛星は地球の周りを周回しており,ORBIS では軌道高度を550km としている.軌道上では地球 の重力ポテンシャルの影響や太陽,月,惑星といった他天体の引力を受けるため一定の高度で一定の速 度で周回することはできない.この現象のことを軌道の摂動というが,本シミュレーションでは摂動の 影響も加味し,軌道上の位置,速度を TLE(Two-Line Element)13)の要素を基準にシミュレーションの 時間経過とSGP4(Simplified General Perturbations Satellite Orbit Model 4)14)を用いて算出している.この 説ではTLEとSGP4について説明し,本シミュレーションにおける軌道位置,速度の算出方法について 述べる.表3.2に本シミュレーションで用いているORBISの想定軌道を示す.
表 3.2 超小型衛星ORBIS想定軌道
高度 550[km]
傾斜角 31[deg]
昇交点赤経 0[deg]
離心率 0
平均回転運動 15.05534468[周/日]
軌道1周周期 5760[sec]
3. 2. 1 TLE
TLEは2行要素とも呼ばれ,平均軌道要素の一つであり,2行のデータにより軌道情報を表すことか らそう名付けられている.以下にORBISのTLEを例として挙げる.なおORBISの打ち上げは未定であ り,まだ打ち上げられていないため次項で説明するSGP4に必要な要素だけをシミュレータ開始条件に 合わせて設定し,シミュレータに組み込んでいる.
ORBIS
1 99999U 16999 17001.00000000 +.00000000 +00000-0 63538-3 0 00005
2 99999 31.0000 000.0000 0000000 000.0000 000.0000 15.05534468
1行目 a bbbbbc ddeeefff gghhh.hhhhhhhh +.iiiiiiii +jjjjj-j +kkkkk-k 1 mmmmmn
2行目 o bbbbb ppp.pppp qqq.qqqq rrrrrrr sss.ssss ttt.tttt uuu.uuuuuuuuvvvvvw
![表 4.2 より, TMU-PPT-5P の充電時間は 0.1[sec] であり,放電時間は 15[μsec] となっているため, 1 秒](https://thumb-ap.123doks.com/thumbv2/123deta/10132486.1966374/45.892.153.692.143.369/表42よりTMUPPT5Pの充電時間は1secであり放電時間はとなっいるため.webp)
 発生トルク](https://thumb-ap.123doks.com/thumbv2/123deta/10132486.1966374/47.892.76.817.122.315/PPT発生トルクスラスタ取り付けベクトルトルク.webp)

