産業応用工学会全国大会 2019 講演論文集,2019 年 9 月 18-20 日 Proceedings of IIAE Annual Conference 2019, September 18-20, 2019
© 2019 The Institute of Industrial Applications Engineers, Japan.
3つのフォトダイオードと複数光源を用いた自己位置推定法
木下佳菜子
a楊世淵
a芹川聖一
a a九州工業大学 工学府 電気電子工学専攻
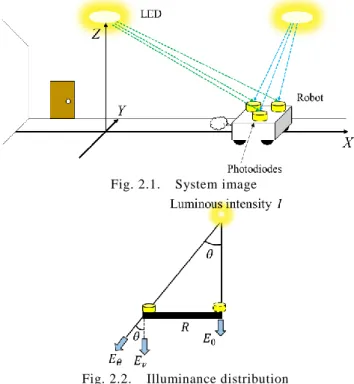
1. はじめに 近年、屋内の自律移動型ロボットに関する研究が進め られている。自律移動を可能とするためには正確な自己 位置推定が必要である。様々な場所で自己位置推定が行 えるように、本論文では LED 照明を活用した方法を提案 する。 2. 本研究システムの原理 2.1 研究システムの全体概要 本研究システムのイメージ図を Fig. 2.1 に示す。ロボ ットの頭に 3 つフォトダイオードを取りつけ LED 照明を 目印とし、自己位置を推定する。また、複数光源でも自 己位置を行えるように、2 つの光源の情報から自己位置 を推定する。 2.2 照度による位置検出 照 度 に 関 す る 距 離 の 逆 2 乗則と斜法入射光特性から cos 4 乗則を導く。 すると、以下のような式が 得られ る 。 𝐸𝑣= 𝐸𝜃cos4𝜃 (2.1) こ れ ら の 式 を 利 用 す る こ と で 照 度 に よ っ て 位 置 を 予 測することが可能となる。 続いて 3 つのフォトダイオードを任意に置く。また、 光源の真下を原点とする 。光源から原点までの距離を𝑍、 原 点 か ら フ ォ ト ダ イ オ ー ド ま で の 距 離 を そ れ ぞ れ 𝑅1、 𝑅2、𝑅3とする。 𝑅𝑖= 𝑍 tan {cos−1(√ 𝐸𝑣,𝑖 𝐸0 4 )} (𝑖 = 1,2,3) (2.2) よって、照度と光源から原点までの距離によりフォトダ イオードと原点までの距離を求められる 。 2.3 複数光源での位置検出 本節では、フォトダイオードで複数光源の同時受光を 可能にする非同期検出原理について述べる 。まず、使用 する LED 照明を異なる周波数に変調する。そして、それ らの光をフォトダイオードで受光した際 、フォトダイオ ードの出力信号は異なる周波数の正弦波の合成波となる 。 その合成波をフーリエ変換すると、周波数ごとに振幅ス ペクトルが得られる。LED 照明の変調周波数で得られた 振幅スペクトルの振幅を読み取ることで 、フォトダイオ ードでの各 LED 照明の受光量が分かる。 2.4 フォトダイオードと複数光源での位置検出原理 まず照明を任意の周波数に変調し、建物内の LED 照明 の位置と周波数が登録された地図データをロボットに与 える。そして、作成された位置に対する照度変化の予測 からロボットのフォトダイオード出力を読み取る 。ここ から 1 個の LED 照明の受光情報を利用すると、ある半径 の円周上にいるという位置特定が可能である 。 まず、2 つの LED 照明の情報から位置を座標として特 定する式を記述する。Fig。 2。3 のように 1 つの LED 照明の中心を原点とし、X 軸上にもう 1 つの LED 照明を 置く。そして、任意の位置に A 点を置く。A 点を(𝑥、𝑦) とすると以下のように 2 つの式ができる。 𝑥2+ 𝑦2= 𝑟 12 (𝑑 − 𝑥)2+ 𝑦2= 𝑟 22 (2.3) (2.4) これらの式を解くと 𝑥 =𝑟1 2− 𝑟 22+ 𝑑2 2𝑑 (2.5) y = √𝑟12− ( 𝑟12− 𝑟22+ 𝑑2 2𝑑 ) 2 (2.6) と表される。しかしながら、このままでは位置推定が 2 通り存在する。2 個の LED 照明から位置を検出するため に、フォトダイオードを 3 つ用いる。フォトダイオード A、B、C とそれぞれ仮定し、回転方向を 判断することで 位置を 1 つに特定することができる。Fig. 2.1. System image
Fig. 2.2. Illuminance distribution
Table. 3.1. Results of the experiment
© 2019 The Institute of Industrial Applications Engineers, Japan. 3. 本研究システムの原理 Fig.3.1 のように 2 つの LED 照明と 3 つのフォトダイ オードを置く。LED 照明はそれぞれ 2kHz と 9kHz の正弦 波に変調させる。 3.1 実験 3 つのフォト ダイオードの情報より 、自己位置を推定 した。また、3 つ目のフォトダイオード C は位置を 2 つ に絞ったのちに使用するだけなので 、位置検出にはフォ トダイオード A、B を用いる。 Table.3.1 より Y 軸の値が 0 のときは エラーとなった 。 この原因としては、(2.6)式を用いた際にルートの中がマ イナスとなってしまったためだと考えられる 。そのため、 システムとしてはエラー表示になった際は 0 とする。エ ラーの部分を 0 とみなしたグラフを Fig.3.2 に示す。 4. おわりに 本論文に示す方法により、高精度な位置検出のシステ ム を 確 立 で き た 。 ま た 、 複 数 光 源 の 中 で も 変 調 さ せ た LED 照 明 を 使 用 す る こ と で 必 要 な 光 の 情 報 の み を 抽 出 して位置検出のシステムに組み込むことが出来た 。また、 全体としての最大誤差も 3cm 以内に抑えることが出来た ので、実用性のある位置推定ができたと考えられる 。今 後はより精度を高めるためによりシンプルな式で位置推 定を行いたい。 文 献 (1) 大 西 康 介, 平 野 誠 大 , 楊 世 淵,「1 つ の フ ォト ダ イ オ ード と 複 数 LED 照明 を用 いた位 置検 出法 の提案 」,産業 応用工 学会 全国 大 会 2016 講 演論文 集, pp. 6-7, 2016.
(2) Yoshino Masaki , Shinichiro Haruyama , Masao Nakagawa : “ High-accuracy positioning system using visible LED lights and image sensor.”, 2008 IEEE Radio and Wireless Symposium. IEEE , pp.439-442, 2008.
(3) Nor Aida Mahiddin, Elissa Nadia Madi, Siti Dhalila, Engku Fadzli Hasan,Suhailan Safie and Noaizan Safie : “ User Position Detection In An Indoor Environment.”, International Journal of Multimedia and Ubiquitous Engineering, Vol.8, No.5, pp.303-312, 2013.
理論値 測定値 X Y X Y A 20 0 21。 60 error B 50 0 49。 52 error A 30 0 30。 48 error B 60 0 60。 53 error A 20 10 21。 79 7。67 B 50 10 50。 83 10。 90 A 30 10 30。 94 9。99 B 60 10 60。 10 11。 94 Fig. 2.3. Position detection in coordinates
Fig. 3.1. Image of experiment
Table. 3.1. Results of the experiment
Fig. 3.2. Results of the experiment