数理物理学
(’19
年度版)
(到達目標)
物理学をはじめとする自然科学や情報科学を学ぶ上で必要となる数学 に関して、数理科学科の必修科目で学んだ内容の復習だけでなく、実際 に物理学等に登場する具体例を用いてより直感的な理解を深めてもらう ことを目指しています。更に、個々の物理学の講義では扱い切れない、少 し進んだ数学的な内容についても、有機的にまとめた議論を行うことで、
宇宙を記述する数学の深い魅力を少しでも伝えることも目指したいと思 います。
(参考書等)
「微分積分」薩摩順吉 著(理工系の基礎数学)岩波書店 そのほか必要に応じて紹介します。
(成績評価方法)
平常点
(授業への出席、ミニレポート提出)
と期末レポートにより総合的に評価する。
(ホームページ)
講義ノート、期末レポート問題等は、林の個人
HP
の「講義内容」http://lab.twcu.ac.jp/lim/sub4.html
の所に、また休講等の急なアナウンスは個人
HP
の「トップページ」http://lab.twcu.ac.jp/lim/index.html
に掲示するので活用して下さい。2
3
第
1
章 高階微分とテイラー・マ クローリン展開
1.1
微分と物理学
元々、ニュートンは瞬間的な速度を表そうとして微分の概念を発見し たと言われている。最も簡単な場合として、x 軸にそった直線運動を考 える。時刻
t
における運動する物体のx
座標をx(t)
と書こう。x(t)
をt
の関数としてグラフ(横軸にt、縦軸に x
をとる。x − t
図と呼ば れる)を書くと、同じ速さで運動する等速(直線)運動の時にはグラフは 直線になるが、速度はこの直線の傾きに他ならない。実際、時間が∆t
だ け経過した時に位置座標x
が∆x
だけ増加したとすると、図1.1
から分か る様に、直線の傾きは∆x ∆t
であるが、これは物体の速度v (v : velocity,
一 定)でもある:v = ∆x
∆t . (1.1)
しかし、一般的には速度は刻々と変わる。では、ある時刻
t
における瞬 間的な速度v(t)
はどの様に求めたら良いだろうか?速度が時間的に変化 する場合にはグラフは一般に図1.2
の様に曲線になるが、時刻t
の近辺(短い時間間隔)で考えれば、x
− t
図のグラフはt
におけるグラフの接 線で近似出来る。従って、この接線の傾きがt
における瞬間的な速度v(t)
に他ならない。接線の傾きは、図1.2
から分かる様に、∆x ∆t
において∆t
を限りなくゼロに近づけた時の極限値として求められるが、これが関数x(t)
のt
に関する微分dx dt
に他ならない:v(t) = dx
dt = lim
∆t → 0
∆x
∆t = lim
∆t → 0
x(t + ∆t) − x(t)
∆t . (1.2)
4
第1
章 高階微分とテイラー・マクローリン展開図
1.1:
等速直線運動のx − t
図同様に、xの関数
(function) f(x)
を微分した関数(導関数)f0 (x)
はf 0 (x) = df
dx = lim
∆x → 0
∆f
∆x = lim
∆x → 0
f (x + ∆x) − f (x)
∆x (1.3)
が定義。y
= f (x)
のグラフを考えると、f0 (x)
は点(x, f (x))
におけるグ ラフの接線の傾きに他ならない。(1.3)
より∆x
が十分小さい時にはf (x + ∆x) − f(x)
∆x ' f 0 (x) → f (x + ∆x) ' f(x) + f 0 (x)∆x (1.4)
が言える。ここで'
は近似的に等しい(nearly equal)という意味。ここ でx → 0, ∆x → x
と置き換え、x が十分に小さいとするとf (x) ' f (0) + f 0 (0)x (1.5)
の関係が得られる。右辺は、関数f (x)
の原点における接線を表す。つま り、この関係式は原点付近ではグラフが接線で近似できることを言って いるのである。1.1.
微分と物理学5
図
1.2:
一般的な運動のx − t
図と接線の傾きで与えられる瞬間的な速度例題
1.1 (1.5)
より、物理でも良く登場する以下の関数のx
が十分小さい時
(正確には | x | ¿ 1
の時) に成立する近似式を求めなさい:(a) (1 + x) n (b) sin x (c) e x
解(a)
については、f(x) = (1 +x) n
とすると、f0 (x) = n(1 + x) n − 1
なの でf (0) = 1, f 0 (0) = n
となり、(1.5)より(1 + x) n ' 1 + nx
が得られる。同様に
sin x ' x, e x ' 1 + x
と近似できる。2
関数の積f (x)g (x)
の微分dx d (f g)
は、(1.4)を用いればd
dx (f g) = lim
∆x → 0
f(x + ∆x)g(x + ∆x) − f(x)g(x)
∆x
= lim
∆x → 0
[f (x) + f 0 (x)∆x][g(x) + g 0 (x)∆x] − f(x)g(x)
∆x
= f 0 (x)g(x) + f(x)g 0 (x) (1.6)
となる。なお、最後の変形で分子の
(∆x) 2
の項を無視したことに注意し よう。6
第1
章 高階微分とテイラー・マクローリン展開1.2
テイラー展開
(1.4)
においてx → a, ∆x = b − a
と置き換えるとf(b) − f (a)
b − a ' f 0 (a) (1.7)
と書ける。これは近似式であるが、近似ではなく正確に成立する関係式 が存在する。即ち(a < b として)、
f (b) − f (a)
b − a = f 0 (c) (a < c < b) (1.8)
が言える。これを「平均値の定理」
と言う。これは、点
A(a, f(a)),
点B(b, f (b))
を結ぶ直線AB
に平行な、関 数f (x)
のグラフの接線が、区間(a, b)
に必ず(少なくとも一つ)
存在する ということを言っていて、c は接点のx
座標である。ここで関数として特に多項式の場合を考えてみよう。簡単な例として
1
次式f(x) = 3 + 2x
を考えると、f(0) = 3, f0 (0) = 2
なので、f(x) = f (0) + f 0 (0)x
が言える。つまり(1.5)
が近似ではなく正確に成り立つ。次 に2
次式、例えばf (x) = 3 + 2x + x 2
の場合を考えると、各次数の係数は3 = f (0), 2 = f 0 (0), 1 = f 00 (0)
2 (1.9)
であるので、
f(x) = f(0) + f 0 (0)x + f 00 (0)
2 x 2 (1.10)
と書くことが出来る。
こうした関係式は一般の多項式について言え、n 次の多項式について は
dx d
nnx n = n!
に注意するとf (x) = f (0) + f 0 (0)x + f 00 (0)
2! x 2 + . . . + f (n) (0)
n! x n . (1.11)
という関係式が正確に成り立つ。ここでf (n) (x)
はf (x)
をn
回微分して 得られる関数(n 階の導関数)である。では、多項式ではない場合にはどうなるであろうか?この場合には、
(1.11)
の様な、あるx
の(有限な)次数までの展開では正確に関数を表1.2.
テイラー展開7
せないはずである(表せるのなら、それは多項式になってしまう)。しかし、その
“誤差”については、上記の「平均値の定理」を用いて正確に表
すことが出来る。例えば
(1.8)
でa → 0, b → x
と置き換え、f(x)
ではな くf (2) (x)
に平均値の定理を適用するとf (2) (x) − f (2) (0)
x − 0 = f (3) (c)
→ f (2) (x) = f (2) (0) + f (3) (c)x (0 < c < x) (1.12)
が得られる。f(1) (x)
を得るために右辺を不定積分し、その際現れる積分 定数をf (1) (0)
で表すとf (1) (x) = f (1) (0) + f (2) (0)x + f (3) (c)
2! x 2 (1.13)
が得られる。同様にもう一度積分すると、最終的に
f (x) = f (0) + f (1) (0)x + f (2) (0)
2! x 2 + f (3) (c)
3! x 3 (1.14)
という展開が得られる。これは、関数f(x)
を2次式f 0)+f (1) (0)x+ f
(2)2 (0) x 2
で近似すると、x3
に比例する余りf
(3)3! (c) x 3
が出る、ということを言って いる。一般に
f (n) (x)
について、平均値の定理を用いた同様の議論をすること が出来るので、f (x) = f (0) + f (1) (0)x + f (2) (0)
2! x 2 + . . . + f (n) (0)
n! x n + f (n+1) (c) (n + 1)! x n+1
(0 < c < x) (1.15)
という
n + 1
次式までの展開が導かれる。最後の“余り”の項 f
(n+1)(n+1)! (c) x n+1
を
“ラグランジュ(Lagrange)
の剰余項”と言う。ここでn
を大きくした時に剰余項が小さくなる、即ち
n lim →∞
f (n+1) (c)
(n + 1)! x n+1 = 0 (1.16)
が言える場合には、(1.15)で
n → ∞
の極限をとったf (x) = f (0) + f (1) (0)x + f (2) (0)
2! x 2 + · · · =
∑ ∞ n=0
f (n) (0)
n! x n (1.17)
8
第1
章 高階微分とテイラー・マクローリン展開 が正確に成立することになる。ただし、f(0) (x) = f(x), 0! = 1
とする。こうした展開式を
「テイラー(・マクローリン)展開」
と呼ぶ。これは、多項式でない一般の関数でも
“無限級数” (無限の次数
の多項式) の形で表現できることを言っていて、極めて重要な関係式であ る。(1.5) は、このテイラー展開の式をx
の1
次の項までで近似したもの である。なお、同様の議論を行うと、より一般的には
f (x) = f (a) +f (1) (a)(x − a) + f (2) (a)
2! (x − a) 2 + · · · =
∑ ∞ n=0
f (n) (a)
n! (x − a) n
(1.18)
となる。テイラー展開の具体例を考えてみよう。まず、f
(x) = e x
の場合には、何回微分しても関数は変わらないので
f (n) (0) = 1
であり、従って、(1.17)
よりe x = 1 + x + 1
2! x 2 + 1
3! x 3 + . . . =
∑ ∞ n=0
1
n! x n (1.19)
と展開できる。例題
1.2 (1.17)
の公式を用いて、以下の関数のテーラー展開を求めなさい:
(a) sin x (b) cos x
解(a)
については、f(x) = sinx
とすると、奇関数の性質からf (0) = f 00 (0) = · · · = 0。また f 0 (0) = cos 0 = 1, f 000 (0) = − cos 0 = − 1, · · ·
となる。よって、(1.17) の公式を用いるとsin x = x − 1
3! x 3 + 1
5! x 5 + . . . =
∑ ∞ n=0
( − 1) n
(2n + 1)! x 2n+1 . (1.20)
同様に、cos x = 1 − 1
2! x 2 + 1
4! x 4 + . . . =
∑ ∞ n=0
( − 1) n
(2n)! x 2n . (1.21)
となる。
2
(N.B.)
一般には、テイラー展開は全てのx
の領域で意味を成すとは限らず、意味を成す
x
の領域が限定される場合がある事に注意しよう。例えば1
1 − x = 1 + x + x 2 + . . . (1.22)
1.3.
オイラーの公式9
、においては、|
x | < 1
の場合においてのみ右辺のテイラー展開は収束し 正しい答えを与えることが分かる(この場合にはラグランジュの剰余項 がn
無限大の極限で消える)。実際、右辺は公比x
の等比数列の無限和な ので、|x | > 1
では発散してしまうが、一方で、この場合でも左辺は有限 の(発散しない)値を与えるので、明らかにテーラー展開は意味を成さ ない事が分かる。1.3
オイラーの公式
e x
もsin x, cos x
も1,2回微分すると自分自身に戻る(符号を別に して)という似た性質がある。これらは実際次のように密接に関係して いる:e ix = cos x + i sin x. (1.23)
この関係を「オイラーの公式」と呼ぶ。実際、テイラー展開
(1.19)、(1.20)、(1.21)
を用いるとe ix =
∑ ∞ n=0
(ix) n n! =
∑ ∞ n=0
( − 1) n
(2n)! x 2n + i
∑ ∞ n=0
( − 1) n
(2n + 1)! x 2n+1 = cos x + i sin x (1.24)
が成立することが確かめられる。(1.23)より、逆に、三角関数を指数関数を用いて
cos x = e ix + e − ix
2 , sin x = e ix − e − ix
2i (1.25)
と書くことも出来る。
また、三角関数に良く似た性質を持つ「双曲線関数」は虚数の角度を 持った三角関数であると言える。つまり、(1.25)で
x
をix (x
は実数) に 置き換えるとcos(ix) = e x + e − x
2 ≡ cosh x, sin(ix) = i e x − e − x
2 ≡ i sinh x, tanh x ≡ sinh x
cosh x (1.26)
が得られるが、この
cosh x, sinh x
が双曲線関数と呼ばれるものである。物理では、例えば相対性理論に現れる「ローレンツ変換」は双曲線関数
10
第1
章 高階微分とテイラー・マクローリン展開 を用いて次の様に書かれる:( ct 0 x 0
)
=
( cosh θ − sinh θ
− sinh θ cosh θ
) ( ct x
)
. (1.27)
ここで、(t, x),
(t 0 , x 0 )
は二つの慣性系(等速で運動する観測者S, S’)
か らある出来事(“事象(event)”)を見た時の、時刻と位置座標(簡単のた
めx
座標のみ考える)であり、cは光速度。“ラピディティー”θ はtanh θ = u
c (1.28)
で与えられる。ここで
u
は二つの慣性系の間の相対速度(S
から見たS’
の速度)。
1.4
無限小量としてのdx, df
微分を表す
dx df
の記法はライプニッツによるものであるが(ニュートン は別の記法を用いた)、これは以下にみる様な優れた点を持ち、また便利 なものである。(1.4)
より、∆f = f (x + ∆x) − f(x)
として∆x、∆f
が小さい時には∆f ' df
dt ∆x (1.29)
であるが、∆x
→ 0、∆f → 0
の極限では両辺は正確に一致すると考えら れる。∆x、∆f が限りなくゼロに近づく極限で∆x → dx, ∆f → df (1.30)
の様に書くことにすると、(1.29) は、この極限で
df = df
dx dx (1.31)
という(微分を無限小量
dx, df
の割り算と見なせば)自明の関係式を表 すことになる。つまり、微分の記法dx df
は無限小量dx, df
の割り算を表 していると見なして良いのである。11
第
2
章 微分方程式
自然科学一般にそうであるが、特に物理学においては基本的な法則の 多くは未知関数の微分(あるいは
“偏微分”)
を含む方程式である「微分方程式」
の形で与えられる。典型例は古典的なニュートン力学において最も重要 な「運動方程式」
F = ma (2.1)
である。ここでは、簡単のため
x
軸に沿った物体(質量をm
とする)の 直線的な(1
次元的な)運動を想定し、力と加速度F, a
はそれぞれのベク トルのx
成分を表しているものとする。加速度a
は((1.2) を参照)a = dv
dt = d 2 x
dt 2 (2.2)
の様に書けるので、運動方程式は
x(t)
に関する(2
階の)微分方程式d 2 x
dt 2 = F
m (2.3)
の形で書かれる。これを満たす関数
x(t)
を求めることを“微分方程式を解
く”と言う。なお。(2.3)の様な、独立変数が一つの場合の“普通の微分”、
即ち常微分を用いた微分方程式を
「常微分方程式
(ordinary differential equation)」
と言う。これに対して偏微分(後述)を用いた微分方程式である「偏微分 方程式」も物理学では良く登場するが、この章では常微分方程式を扱う。
2.1
任意定数、一般解と特解
12
第2
章 微分方程式 数学の問題として考えるために、独立変数をx
として、その関数y = f (x)
を考えよう。例としてd 2 y
dx 2 = x 2 + 2x + 3 (2.4)
という
2
階の(常)微分方程式を考えよう。微分の逆演算は積分なので、基本的に
2
回(不定)積分すれば元の関数y
が求まるはずである。実際
(2.4)
をx
で順次2
回不定積分するとdy
dx =
∫
(x 2 + 2x + 3)dx = x 3
3 + x 2 + 3x + c 1 , y = x 4
12 + x 3 3 + 3
2 x 2 + c 1 x + c 2 (2.5)
の様にy
を求めることが出来る。ここで注意すべき重要なことは、2回不定積分したので解には二つの任 意定数(積分定数)c
1 , c 2
が含まれるということである。一般に「n 階の微分方程式の解は
n
個の任意定数を含む」ことになる。(2.5) で求めた解は、すべての解を網羅している(他には解 は有り得ない)最も一般的な解なので
「一般解」
と呼ばれる。自分が求めた解が一般解であるかどうかを判断するには任 意定数の数を見ると良い。2階の微分方程式で
2
個の任意定数を持つ解を 見つけたとすると、解はそれ以外にはあり得ず(これを数学的には“解の
一意性”という)、最も一般的な解を求めた事になる。これに対し、例えば
(2.5)
でc 1 = 0
としたy = x 12
4+ x 3
3+ 3 2 x 2 + c 2
も(2.4)
の解ではあるが、任意定数をc 2
一個しか含まないので一般解ではない。こうした微分方程式のある特別な解を
「特解(特殊解)」
と呼ぶ。
なお、力学において例えば重力を受け鉛直方向に運動する物体につい て考えると、時刻
t = 0
における物体の位置と速度という二つの初期条 件のとり方で、その後の運動が変わるが、逆にこうした二つの条件を与 えると物体の運動は一意的に決まることになる。同様に、今考えているx
の関数においても、x= 0
でのy
とdy dx
を与えるとc 1 , c 2
、従って解が完 全に決定される。このようなx = 0
で与えられる条件を「初期条件」
と呼ぶ。実際、(2.5)において、例えば
y(0) = 0, dx dy (0) = 1
と初期条件を2.2. 1
階の斉次微分方程式13
与えるとc 1 = 1, c 2 = 0
と固定され、解がy = x 12
4+ x 3
3+ 3 2 x 2 + x
と決ま るのである。所で、微分方程式は上記の様に容易に解けるとは限らず、解析的には 解けないことも多い(そうした場合でも、コンピュータを用いて数値的 に(近似的にではあるが)解くことが可能な場合もある)。例えば
d dx
2y
2+ 2x( dy dx ) 2 + 3x 2 y = 5x
といった場合には、(少なくとも直ぐには)解法は 見つからない。しかし、一定のタイプの微分方程式については、その系 統的な解法が知られている。以下の節で、それらの内のいくつかを紹介 する。2.2 1
階の斉次微分方程式
変数
x
の未知関数y
について同じ次数の項のみから成る微分方程式を「斉次(同次)微分方程式
(homogeneous differential equation)」
と言う。一番簡単な
1
階の斉次微分方程式は一般にa(x) dy dx + b(x)y = 0 (y, dy dx
に関して1
次式)と書けるが、両辺をa(x)
で割り、a b
を改めてa(x)
とするとdy
dx + a(x)y = 0 → dy
dx = − a(x)y (2.6)
と書ける。例えばa(x) = − 1
の様に定数であれば、微分して自分自身に 比例する関数としてはe x
があるので、容易にy(x) = ce x (2.7)
の様に、1個の任意定数
c
を持つ一般解が得られる。a(x)
が一般の関数の場合には、このような解の予想は難しいが、以下 に示すようにdy dx
を無限小量dx, dy
の割り算と見なすことで系統的に解 を求めることが出来る。まず、(2.6) を以下の様にx
に関係する部分とy
に関係する部分に分ける様に変形するdy
y = − a(x)dx. (2.8)
これに積分記号を付け、不定積分の形にすると(無限小量の足し合わせ に対応)
∫ 1
y dy = − ∫ a(x)dx → log | y | = − ∫ a(x)dx → y = ± e −
∫ a(x)dx
(2.9)
14
第2
章 微分方程式 の様に解y
を求めることが出来る。ここで不定積分∫ a(x)dx
に1個の任 意定数が現れるので、これが一般解である。なお、この微分方程式の様 に、独立変数(x)
と従属変数(y)
を( ∫ y 1 dy = − ∫ a(x)dx
の様に)左右両 辺に分離する事が出来るタイプの微分方程式を「変数分離型」の微分方程式 と呼ぶ。
例えば
a(x) = 2x + 1
の場合には、(2.9)よりy(x) = ± e −
∫ (2x+1)dx
= ± e − x
2− x − c = Ce − x
2− x (C = ± e − c ) (2.10)
の様に、1個の任意定数C
を含む一般解が求まる。例題
2.1
物理学における例として、x 軸に沿って運動する物体(質量 m)
に、速度v
に比例する“抵抗力” F = − kv (k :
比例定数, k >0)
が働く 場合を考える。この場合の運動方程式F = ma
を解いて、速度v(t)
を求 めなさい。ただし物体の初速度をv 0
とする。解
a = dv dt
より、運動方程式F = ma
は− kv = m dv
dt → dv
dt = − k
m v (2.11)
の様に、v に関する1階の斉次微分方程式が得られる。上で述べた解法 を用いると
∫ 1
v dv = − k m
∫
dt → log | v | = − k
m t + c → v = Ce −
mkt (2.12)
の様に解ける。ここでC = ± e c
は任意定数であるが、t= 0
でv(0) = C
なので、C は物体の初速度v 0
に他ならない。こうしてv = v 0 e −
mkt (2.13)
の様に速度が求まることになる。なお、これから
t → ∞
の極限で速度は ゼロとなるが、これは十分時間が経つと摩擦力のために物体が止まると いう常識的な事実を言っているに過ぎない。2
2.3
定数係数の2
階の斉次微分方程式
2.3.
定数係数の2
階の斉次微分方程式15
同じ斉次微分方程式でも2
階になると上述の様に一般的に解くことは 難しい。しかし、特に各項の係数が(上記のa(x)
の様ではなく)定数の 場合、つまり「定数係数の
2
階の斉次微分方程式」の場合には、系統的に解く方法が知られているので、その解法を紹介する。
定数係数の
2
階の斉次微分方程式は次の形に書ける:d 2 y
dx 2 + a dy
dx + by = 0 (a, b
:定数).(2.14)
ここで注意すべき大切なことは、この微分方程式の各項はy
に関して一 次であるということである。こうした微分方程式を「線形の微分方程式」
と言う。線形の斉次微分方程式では
「重ね合わせの原理」
が成立する。これは、特解の線形結合(重ね合わせ)もまた微分方程式 の解である、ということである。実際、微分方程式(2.14)の
y 1 , y 2
とい う二つの独立な(たがいに比例しない)特解が見つかったとすると、こ れらは当然d 2 y 1
dx 2 + a dy 1
dx + by 1 = 0, d 2 y 2
dx 2 + a dy 2
dx + by 2 = 0 (2.15)
を満たすが、これらの線形結合c 1 y 1 + c 2 y 2 (c 1,2 :
任意定数)(2.16)
も(2.14)を満たすことがわかる。それは、dx d
22(c1 y 1 +c 2 y 2 ) = c 1 d
2y
1dx
2+c 2 d
2y
2dx
2等より
d 2
dx 2
(c1 y 1 + c 2 y 2 ) + a d
dx
(c1 y 1 + c 2 y 2 ) + b
(c1 y 1 + c 2 y 2 )
= c 1 ( d 2 y 1
dx 2 + a dy 1
dx + by 1 ) + c 2 ( d 2 y 2
dx 2 + a dy 2
dx + by 2 )
= 0 + 0 = 0 (2.17)
が言えるからである。ここで
(2.15)
を用いた。上の議論で
c 1,2
は任意でよいので、(2.16)
の線形結合は二つの任意定数c 1 , c 2
を含む2階の微分方程式の解になっている。よって、これが一般解 なのである。こうして、何らかの方法で二つの特解(3階の微分方程式な16
第2
章 微分方程式 ら三つの特解)を見つけることが出来れば、それらの線形結合により一 般解を構成できることになる。そこで、特解として
y = e λx (λ :
定数)(2.18)
の形の解を想定してみよう。すると、この指数関数は微分すると自分に 比例するので(
dy dx = λe λx = λy、等)、(2.18)
を(2.14)
に代入するとλ 2 y + aλy + by = (λ 2 + aλ + b)y = 0, (2.19)
即ちy 6 = 0
とするとλ 2 + aλ + b = 0 (2.20)
という代数方程式(λ に関する
2
次方程式)が得られる。つまり、(2.18) の形にしたために、微分方程式が代数方程式に帰着したことになる。こ うした2
次方程式を「特性方程式」
と言う。
(2.20)の二つの解は
λ 1,2 = − a ± √
a 2 − 4b
2 (2.21)
で与えられる。(2.18)に代入すると二つの特解
y 1,2
が得られる:y 1,2 = e λ
1,2x . (2.22)
よって(2.14)
の一般解はy = c 1 e λ
1x + c 2 e λ
2x (λ 1,2 = − a ± √
a 2 − 4b
2 , c 1,2
:任意定数)(2.23)
と求まる。例題
2.2
バネ定数k
のバネに取り付けられ、x 軸に沿って振動する質量m
の調和振動子を考える。調和振動子に働く力は「フックの法則」よりF = − kx (x
は自然長の位置からの変位) と書ける。この調和振動子に関 する運動方程式を立て、その微分方程式を解いて、時刻t
の関数x
の一 般解を求めなさい。解
2.3.
定数係数の2
階の斉次微分方程式17
調和振動子に関する運動方程式より、− kx = ma → d 2 x
dt 2 = − k
m x → d 2 x dt 2 + k
m x = 0
(2.24)
の様にx
に関する2
階の微分方程式が得られる。(2.21) においてa = 0, b = m k
とするとλ 1,2 = ± √ − 4 m k
2 = ±
√
k
m i. (2.25)
よって、(2.24)の一般解は
ω =
√ k
m
としてx = c 1 e iωt + c 2 e − iωt (2.26)
となる。ここで、オイラーの公式
(1.23)
より、(2.26) は三角関数を用いて書き 直すことが出来、x = C 1 sin(ωt) + C 2 cos(ωt) (C 1 = i(c 1 − c 2 ), C 2 = c 1 + c 2 ) (2.27)
と書ける。更に三角関数の合成を用いるとx = A sin(ωt + ϕ 0 ) (A =
√
C 1 2 + C 2 2 , tan ϕ 0 = C 2
C 1 ) (2.28)
の様に、最終的に“振幅” A
と“初期位相” ϕ 0
を用いて書くことが出来る。2
19
第
3
章 偏微分と全微分
3.1
多変数関数の偏微分
今まで考えて来た関数は
x
という一変数のみの関数であるが、物理 学では、物理的な量(物理量)は、時刻や位置座標の関数である場合が 多い。例えば電位(クーロン・ポテンシャル)φ(t, ~r) (~ r = (x, y, z))
は4
つの独立変数の関数である。こうした関数を「多変数関数」
という。多変数関数の場合には、微分を考える際に、他の変数を固定し ながら、一つの変数のみに
“偏って”微分を行うことが可能である。例と
して2
変数x, y
の関数z = f (x, y) (z
は位置座標ではないので注意)を考 える。この時、例えば∆x lim → 0
f(x + ∆x, y) − f (x, y)
∆x (3.1)
を、関数
z
のx
に関する偏微分と言い、∂z
∂x (3.2)
と書く。
y
に関する偏微分も全く同様に定義できる。例としてz = f (x, y) = x 2 y
を考えると、定義に従って計算すれば∂z
∂x = lim
∆x → 0
f(x + ∆x, y ) − f (x, y)
∆x
= lim
∆x → 0
(x + ∆x) 2 y − x 2 y
∆x = lim
∆x → 0
(2x∆x + ∆x 2 )y
∆x
= 2xy (3.3)
と求まるが、これは
f (x, y) = x 2 y
においてy
を定数の様に見なしてx
で 微分したものと全く同じである。20
第3
章 偏微分と全微分3.2
全微分
では、x, yが
“無限小”
量dx, dy (変化量 ∆x, ∆y
を限りなくゼロに近 づけたもの)だけ変化した時の関数z
の“無限小”の変化 dz
はどう書ける であろうか。例えばz = xy 2
の場合について具体的に計算してみるとdz = (x + dx)(y + dy) 2 − xy 2
= (x + dx)(y 2 + 2ydy) − xy 2
= y 2 dx + 2xydy (3.4)
となる。ただし、ここで、
dx, dy
について2
次以上の項(“高次の微小量”)は無視した。実際、例えば
dxdy dx = lim ∆x,∆y → 0 ∆x∆y ∆x = 0
であるので、dx に比べdxdy
は無視できることになる。一方∂z
∂x = y 2 , ∂z
∂y = 2xy (3.5)
なので、(3.4)は
dz = ∂z
∂x dx + ∂z
∂y dy (3.6)
と書けることが分かる。(3.6)の関係式は、この関数に限らず一般に成立 し
「全微分の式」
と呼ばれる。(3.6) で例えば
dy = 0
とするとdz dx = ∂z ∂x
となるが、これは、y
を固定した時のz
の変化量をx
の変化量で割り、両者を無限小に持って 行くと、その割り算dz dx
が偏微分に一致するという当然の事を言っている。なお、全微分の式
(3.6)
は一変数の時の(1.31)
に対応するものである。物理学では、例えば円運動を考える時などに用いられる極座標を用い て運動を記述することがある。ここでは、全微分を用いて、無限小の距 離だけ離れた
2
点間の距離を極座標で表すことを考える。簡単のため平 面上で考え、まずx − y
座標(直交座標)を用いて点の位置を記述する。この時、無限小の距離離れた
2
点、(x, y) および(x + dx, y + dy)
の間の 無限小の距離dl
の2
乗は、単にピタゴラスの定理よりdl 2 = dx 2 + dy 2 (3.7)
3.2.
全微分21
で与えられる。今度は、極座標(r, θ)
で考えてみよう。直交座標と極座標 の間の関係はx = r cos θ,
y = r sin θ (3.8)
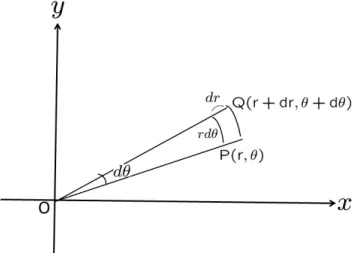
で与えられる。これ以降の導出は、以下の例題を参照して頂きたい。
例題
3.1
無限小の距離離れた2
点(r, θ)
および(r + dr, θ + dθ)
の間の距 離dl
をdr, dθ
を用いて表しなさい。解
極座標が
dr, dθ
だけ変化すると、全微分の式を用いると、直交座標は(3.8)
よりdx = ∂x
∂r dr + ∂x
∂θ dθ = cos θ dr − r sin θ dθ, dy = ∂y
∂r dr + ∂y
∂θ dθ = sin θ dr + r cos θ dθ (3.9)
だけ変化する。よって、(3.7)を用いるとdl
はdl 2 = dx 2 + dy 2 = dr 2 + r 2 dθ 2 (3.10)
が得られる。なお、この式の意味は図3.1
からも容易に理解可能である。P(r, θ)
と無限小離れたQ(r + dr, θ + dθ)
の間の距離は、dr, rdθ を2辺 とする直角三角形の斜辺の長さに等しいのである。2
22
第3
章 偏微分と全微分図
3.1:
極座標による2
点間の無限小の距離23
第
4
章 ベクトル場の線積分、面 積分と体積積分
4.1
線積分、面積分、体積積分
x
の関数f (x)
の定積分は、積分領域を微小な幅∆x
のN
個の区間に 分け、それぞれにおける関数値に幅∆x
を掛けて足し合わせることで定 義できる(図4.1
参照):∆x lim → 0
∑ N i=1
f(x i )∆x =
∫ b
a
f (x)dx. (4.1)
要するに、∆x
→ 0
の極限で∆x → dx, ∑ → ∫ (4.2)
と置き換えられると考えればよい。
∫ b
a f(x)dx
は、言わばx
軸という直線に沿った積分であるが、これを3
次元空間内の任意の曲線に沿った積分に一般化することができる。3次元 空間のある点P
から別の点Q
までの曲線の経路(contour)
をC
と呼ぶ。この経路に沿って位置座標
(x, y, z)
の関数F (x, y, z)
を積分することを考 える。具体的には、x 軸に沿った積分と同様に、経路C
をN
個の微小 区間に分け、i番目の区間の中のある点(例えば中点)(xi , y i , z i )
におけ る関数値F (x i , y i , z i )
に、その区間の幅∆r i
を掛けて足し合わせ、最後に∆r i → 0 (N → ∞ )
の極限をとって、この積分を定義する:∆r lim
i→ 0
∑ N i=1
F (x i , y i , z i )∆r i ≡ ∫
C
F (x, y, z)dr ( ≡
は定義を表す).(4.3)
24
第4
章 ベクトル場の線積分、面積分と体積積分図
4.1:
定積分の意味こうした曲線に沿った積分を
「線積分」
と呼ぶ。
もしも経路
C
が閉じた経路である場合には、線積分はI
C
F (x, y, z)dr (4.4)
の様に書かれる。
同様に、空間内の曲面
S
上での積分である「面積分」
も定義できる。面は閉じた面でも構わない。面
S
をN
個の微小な領域 に分け、そのi
番目の領域の面積を∆S i
、そこでの関数値をF (x i , y i , z i )
((x
i , y i , z i )
は領域内の例えば中点)とすると∆S lim
i→ 0
∑ N i=1
F (x i , y i , z i )∆S i ≡ ∫
S
F (x, y, z)dS (4.5)
として面積分を定義できる。4.2.
ベクトル場の積分25
更に、体積を持った領域V
を微小な体積を持った無数の微小領域に分 け、そこでの関数値に微小領域の体積を掛けて足し合わせ、最後に微小 体積をゼロとする極限として「体積積分」
を定義することが出来る:
∫
V
F (x, y, z)dV (4.6)
を定義出来る。
4.2
ベクトル場の積分物理では、電場(電界)
E(x, y, z) ~
の様に、位置座標の関数(実際には 時刻t
にも依る場合が多いが)として空間の各点ごとにベクトルが与えら れる事が多い。こうした物理量を「ベクトル場」
と呼ぶ。
物理では、ベクトル場に関する積分がよく登場する。まずベクトル場
V ~ (x, y, z)
の線積分を考えよう。ある点P
から別の点Q
までの曲線の経路C を考える。経路上のある点における、曲線の接線方向のベクトル場の成分V t
は、接線方向の単位ベクトルを~tとすると、V t = V ~ · ~t = | V ~ | cos θ (θ : V ~
と~tとの成す角) と書ける。このV t
を関数値とする線積分∫
C
V t dr =
∫
C
V ~ · ~t dr (4.7)
を考える。
(4.7)
で、~t dr は無限小の区間の始点から終点に向かうベクトルで、これを
d~ r
と書くと(d~r
は“線要素”と呼ばれる)、線積分は
∫
C
V ~ · d~ r (4.8)
とも書かれる。なお、線積分には方向性があり、d~
r
がP
からQ
に向かう 方向を向く場合に、この線積分はP
からQ
の方向への線積分であると言 い、経路C
に矢印を付けてその方向を明示したりする。経路C
と逆向き の、QからP
に向かう線積分を∫
C ¯
V ~ · d~ r (4.9)
26
第4
章 ベクトル場の線積分、面積分と体積積分 と書く事にすると、明らかに(同じ微小区間で、d~ r
の方向が逆なので)∫
C ¯
V ~ · d~ r = − ∫
C
V ~ · d~ r (4.10)
の性質がある。
物理における線積分の例として、位置エネルギーを挙げることが出来 る。位置ベクトル
~ r = (x, y, z)
の点P
における(物体に働く力F ~
によ る)物体の持つ位置エネルギーU (~ r)
=U (x, y, z)
は、基準点O(普通
は原点)から点P
へ、ある径路C
にそってF ~
に逆らって物体を運ぶ時の(人がする)仕事に等しいが、それは経路
C
の無限小の区間における仕 事− F ~ · d~ r
を足し合わせて得られるので、U (~ r) = − ∫
C
F ~ · d~ r (4.11)
という線積分で与えられる。
例題
4.1
力と位置エネルギーの間の基本的な関係式F ~ = − grad U (4.12)
を導きなさい。ただし、grad (gradient,勾配) は
grad U ≡ ( ∂U
∂x , ∂U
∂y , ∂U
∂z ) (4.13)
で定義される。
解
位置ベクトル
~ r = (x, y, z)
の点P
における位置エネルギーと、d~r = (dx, dy, dz)
だけ点P
から離れた点における位置ベクトルの差dU
は、全 微分の式((3.6)
参照)を用いるとdU = U(~ r + d~ r) − U(~ r) = U (x + dx, y + dy, z + dz) − U (x, y, z)
= ∂U
∂x dx + ∂U
∂y dy + ∂U
∂z dz
= ( ∂U
∂x , ∂U
∂y , ∂U
∂z ) · d~ r (4.14)
4.2.
ベクトル場の積分27
と書ける。一方、dUは、物体をF ~
に逆らってd~ r
だけ運ぶ時の仕事に等 しいのでdU = − F ~ · d~ r (4.15)
とも書ける。よって、(4.14)、(4.15)より、力と位置エネルギーの間の関 係式
F ~ = − grad U
が得られる。2
ナブラ
(nabla)・ベクトル
∇ ≡ ~ ( ∂
∂x , ∂
∂y , ∂
∂z ) (4.16)
を用いると
grad U = ∇ ~ U → F ~ = − ∇ ~ U (4.17)
とも書ける。なお、勾配という名称の由来は、例えば重力による位置エ ネルギー一定の線を地図の等高線の様に書いた時、重力は、位置エネル ギー一定の線と直角な、つまり勾配の一番きつい方向を向くが、これと 同様に、力は一般に位置エネルギーの勾配が一番きつい方向を向く、と いうことから来ている。次にベクトル場の面積分を考える。この場合には、ある曲面
S
上の点 で、そこでのベクトル場V ~
の面に垂直な方向(法線方向という)の成分V n
、即ち、そこでのベクトル場と、法線方向の単位ベクトル(法線ベク トル)~n
との内積を関数値として面積分を考える:∫
S
V n dS =
∫
S
V ~ · ~ n dS =
∫
S
V ~ · d ~ S (4.18)
ここで、d ~S ≡ ~ ndS
は面に垂直で、大きさが面積要素dS
であり、面積要 素ベクトルと呼ばれる。尚、法線方向は2
通りあり得るが、面S
が閉じ た面の場合には、面の内部から外側に向かう方向に法線方向をとる。例えば、点電荷を囲む閉曲面
S
において電場(電界)E ~
の面積分∫
S
E ~ · d ~ S (4.19)
は、