論 文
除雪車運行支援のためのタブレットシステムの開発と実証実験・
評価 *,**
久保田祐介
†山本 寛
†山崎 克之
†Development and Experimental Evaluation of Tablet System for Snow-Blower Support
∗,∗∗Yusuke KUBOTA
†, Hiroshi YAMAMOTO
†, and Katsuyuki YAMAZAKI
†あらまし 除雪車による除雪作業は豪雪地帯において必要不可欠である.しかしながら,降雪による視界不良 が原因で除雪車は道路付帯設備を破壊してしまうことがあり除雪作業の負担となっている.そこで本研究では,
雪のない景色を除雪オペレータに提示する除雪車支援システムを提案する.提案するシステムは除雪車の現在位 置と進行方向を推定し,雪に埋もれていない現在地の道路画像(雪なし画像)を表示する機能を備えている.更 に,除雪車では後退・Uターンが多いため,これらに対応する位置推定アルゴリズムを開発した.実験を通して,
1秒間隔での雪なし画像でも,除雪オペレータによる除雪作業に十分に効果を発揮することなどを確認した.ま た,GPSログデータの解析と3Dグラフ化によって,狭い道や建物が密集している地域など,除雪に時間がか かっている場所を見える化できることを示した.この結果,降雪や積雪量よりも住宅の密集具合などの環境が除 雪に与える影響が大きいことを示した.
キーワード Android,地理情報システム(GIS:Geographic Information System), 仮想現実 (VR:Virtual Reality), GPS
1.
ま え が き新潟県長岡市のような豪雪地域では,除雪車による 除雪活動は非常に重要である.しかしながら,除雪に 不慣れな除雪オペレータは道路設備(マンホール,グ レーチング,消火栓など)の破壊や,除雪車が路肩に 乗り上げてしまうことをおそれるあまりに,円滑な除 雪作業を行えずにいる.この原因は積もった雪が道路 を覆ってしまうことで可視性が低下することにあり,
もし除雪オペレータが道路設備の位置関係や道路の幅,
カーブの向き・角度などの道路状況を把握することが できればこの問題を回避することができる.
また,除雪費用に関する課題も存在している.除雪 作業は除雪管理者が土木業者などへ委託する形で行わ れており,現状その支払金額は単純に走行距離と走行
†長岡技術科学大学,長岡市
Nagaoka University of Technology, 1603–1 Kamitomioka- machi, Nagaoka–shi, 940–2188 Japan
*本論文は,インターネットアーキテクチャ(IA)研究専門委員会推 薦論文である.
**本論文は,システム開発・ソフトウェア開発論文である.
時間により算出されており,除雪対象の降雪量などは 考慮されていない.除雪作業の管理を行っている自治 体の担当者は,議会や地域住民へ除雪費用算出の根拠 を説明することが求められているが客観的なデータが 不足しており,除雪作業の見える化,すなわち除雪作 業に伴う定量的・客観的なデータと解析を必要として いる.
これらの解決策としてカーナビゲーションシステ ム
[1]
〜[4]
の利用が考えられるが,既存のものは自動 車向けに開発されており,除雪車が注意すべき道路設 備などの位置情報を提供するまでには至っていない.また,除雪車向けのシステムとして除雪車の位置情報 を提供する地理情報システム
[5], [6]
が開発されている が,除雪活動の管理のみに留まっている.そこで,我々はこれらの問題を解決する除雪車支援 システムの研究を行っている
[7], [8]
.特に本論文では,Android
タブレットを用いた新たな除雪車向け運用・管理システム(タブレットシステム)を提案する.こ のシステムは,
GPS
による位置情報とジャイロスコー プセンサを利用して除雪車の現在地と進行方向を推定し,
Android
タブレットの画面上で雪に埋もれていな い時期に事前に撮影した道路状況の画像を提供する.また,除雪作業の見える化のために除雪車の運用状況 を
GPS
の位置情報として保存する機能も備えている.以下,
2.
では研究背景と関連技術について述べ,3.
では提案するシステムの概要を示す.また,
4.
では除 雪車の固有動作の特定方法について,5.
では提案した システムの評価実験について述べ,最後に6.
にて結 論を述べる.2.
研究背景と関連技術2. 1
除雪作業が抱える課題除雪車による除雪作業は雪国では必要不可欠である が,時々道路設備を壊してしまうことがある
[9]
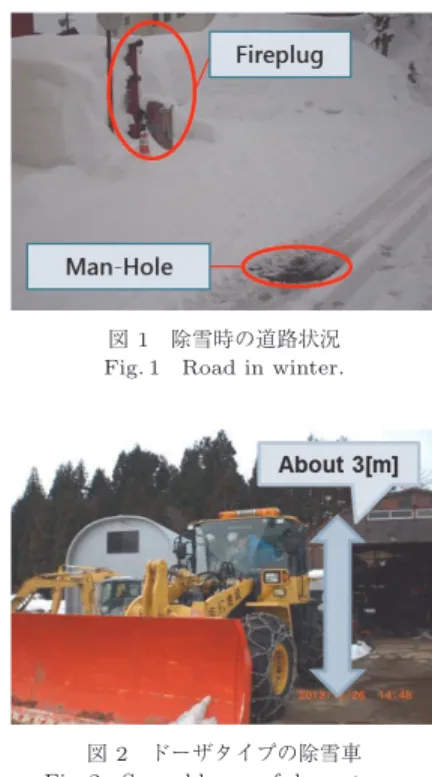
.この 問題の原因は雪が道路を覆ってしまい,道路上にある 設備などの位置関係が把握できないことに起因する.図
1
は冬場の道路状況の例を示している.この図か ら分かるように,マンホールや消火栓が雪によって隠 れてしまうと,具体的に設備の位置を判定するのは難 しい.そのため,道路設備の破壊をおそれるあまり,道路 上に雪を少し残した状態での除雪作業になってしまう ことがあり,地域住民の生活にも影響を及ぼしている.
もし除雪オペレータが雪のない道路状況を把握するこ とができれば,この問題は解決すると考えられる.
加えて,除雪費用に関する問題も存在している.除 雪車の出動判断は降雪量をもとに行われており(例:
降雪量が
10[cm]
以上の場合,除雪車は出動),降雪量 は毎年異なるため除雪費用も毎年異なっている[10]
. 新潟県長岡市においても,例年補正予算を組むことに よりその違いに対応している[11]
.また,除雪作業は除雪管理者が土木業者などへ委託 する形で行われており,現状その支払金額は走行距離 と走行時間により算出されている.つまり,降雪量や 除雪業者のスキルを反映しておらず,必要以上の走行 距離・時間を要しているのではないか,など自治体の 担当者と除雪業者の間で議論となることが多い.また,
同一の自治体内であっても,地域ごとに走行距離と走 行時間は大きく異なり,除雪費用が安い地域と非常に 高い地域が存在する場合があるが,降雪量に依存する のかスキルに依存するのかの判断は難しい.更に,雪 捨場の数が十分でなく除雪作業が効率的に行えていな い場所も存在するが,その場所を特定できる客観的な データがない.以上のように,除雪費用の削減,適正
図1 除雪時の道路状況 Fig. 1 Road in winter.
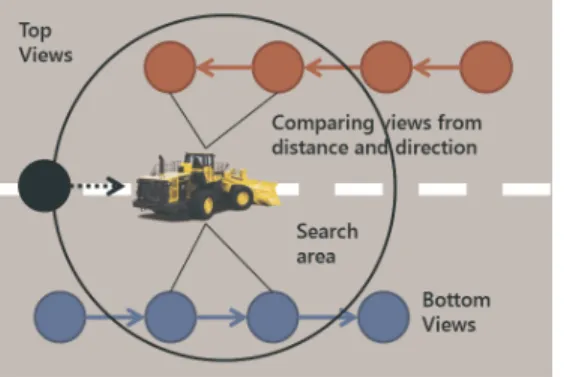
図2 ドーザタイプの除雪車 Fig. 2 Snow-blower of dozer type.
か否かの判断,雪捨て場整備などの施策のためには客 観的なデータが不足しており,除雪作業の見える化,
すなわち除雪作業に伴う定量的・客観的なデータと解 析が必要となる.
そのため,除雪管理者は地方議会ひいては地域住民 に除雪車や除雪費用について説明する必要があり,除 雪作業そのものの客観的・定量的な情報による見える 化が重要となっている.
2. 2
既存のナビゲーションシステムナビゲーションに利用される代表的な地理情報シス テム(
GIS:Geographic Information System
)としてGoogle Maps [13]
やGoogle Street View [14]
が挙げ られる.Google Maps
はインターネットを通して詳 しい道路地図を提供するシステムであるが,経路案内 にのみ特化しており,道路設備の位置などを確認する ことはできない.一方,
Google Street View
は様々な地点における 歩行者若しくは自動車の視点によるパノラマ画像を表 示するシステムであり,画像で道路状況を示してくれ るが,除雪オペレータ向けの視点ではない.図2
に示 すように,除雪車の運転席は自動車や歩行者とは比べ 物にならないぐらいに背が高く,視線も大きく違う.また,
Google Maps
やStreer View
は除雪対象道路全てを対象にしているわけではなく,都市部以外の 地域は未だカバーしきれていない.これらの理由から,
除雪車向けのナビゲーションに両システムを利用する ことは難しい.
加えて,拡張現実
(AR: Augmented Reality)
を利 用したカーナビゲーションシステム[4]
も開発されて いるが,自動車向けに特化していることや,現在のフ ロントカメラ映像を使用するため,雪が積もっている 映像を見ながらのナビゲーションになり,この問題の 解決にはならない.その一方で,除雪車向けの
GIS
も開発されてい る[5], [6]
.しかしながら,除雪活動の管理を目的に開 発されており,除雪車の位置情報を記録するだけに留 まっている.同様に,除雪車向けのナビゲーションシ ステム[15]
も開発されているが,ロータリタイプの除 雪車向けに設計されており,路肩に雪を運ぶために頻 繁に前後進を繰り返すドーザタイプの除雪車には対応 できていない.一方,近年,加速度や角速度などの物理量を計測 する複数のセンサ(加速度センサ,ジャイロスコープ センサなど)や
GPS
を搭載したAndroid
タブレット(
Sony Xperia Tablet Z SO-03E [16]
など)が登場し ている.Android
タブレットはセンサとGPS
を併用 することで現在地を推定することができ,大きな画面 をもっているため視覚的な情報の提供もできる.なに より,高い処理能力と大容量のストレージを兼ね備え ており,容易に機能やデータの追加が可能である.これらの理由から様々なナビゲーションシステムが スマートフォンだけでなく大画面のタブレットを利用 して開発されており
[17]
〜[19]
,特にAndroid OS
が 搭載されたタブレット(Android
タブレット)は除雪 作業を支援するためのGIS
と親和性が高いと考えら れる.2. 3
本研究の目的以上の状況を踏まえて,道路設備の破壊のような事 故を起こさず除雪オペレータが安全に除雪車を運転で きること,道路設備を適切に把握することで除雪をき れいに実施できることを目的に,雪が積もっていない ときの道路状況を撮影した画像を提供する仮想現実
(VR:Virtual Reality)
を活用した除雪車向け運用・管 理システムを提案する.特に本論文では,
Android
タブレット内部のジャイ ロスコープセンサとGPS
を使用して除雪車の位置と 進行方向を推定し,図3
のように現在地付近の雪のな図3 除雪中に雪なし画像を表示 Fig. 3 Real scene of snow-blower front window.
い道路状況を示す機能を備える.更に,除雪作業の見 える化を図るための
GPS
ログデータを収集するシス テムを実装する.3.
提案システム3. 1
システム概要提案する運用・管理システムのナビゲーション機能 の概要を図
4
に示す.本システムは,主に二つの機能 で構成される.一つはAndroid
タブレットで表示する ための詳しい道路状況を撮影する撮影機能であり,も う一つは除雪車の現在地を推定しその位置と方向に適 合する近辺の道路画像を表示する雪なし画像表示機能 である.なお,本論文において,この撮影機能によっ て生成した位置情報付き画像を“
雪なし画像”
と呼ぶ.提案システムのブロック図を図
5
に,また,それぞれ の機能の動作順序を以下に示す.撮影機能(雪が積もっていない時期に行う):
(
1
)PC
,GPS
,Web
カメラを設置した自動車で 除雪対象道路を走行する.なお,除雪車に搭乗する 除雪オペレータ視点の道路状況を撮影できるように,Web
カメラは地上から3[m]
の位置で固定している.(
2
) 定期的(例:1
秒ごと)に位置情報と道路状 況を撮影した画像の組を生成して保存する.(
3
) これらのデータをもとに雪なし画像データ ベースを構築する.雪なし画像表示機能(除雪作業時):
(
1
) 構築した雪なし画像データベースをインス トールしたAndroid
タブレットを除雪車に設置する.(
2
)GPS
とジャイロスコープセンサから除雪車 の現在地と進行方向を推定する.(
3
) 推定した位置情報から現在地に対応する道路 画像を決定し,表示する.(
4
) 推定された位置情報をGPS
ログデータとし図4 提案システムの利用シーン Fig. 4 Overview of proposed system.
図5 位置推定と画像表示処理のブロック図 Fig. 5 Block diagram of location search and showing
image.
図6 アラート機能の概要図 Fig. 6 Overview of alert function.
て
Android
タブレットに挿入したSD
カードに保存 する.また,除雪オペレータの記憶違いによる事故を減ら すためにアラート音を再生する機能を備えている.図
6
はこの機能の概要である.除雪オペレータは除雪作 業経路の雪なし画像を確認しながら,マンホールなど の注意すべき道路設備のあるポイントで登録をし,除 雪中にそのポイントに近づいたら音を鳴らすという機 能である.3. 2
雪なし画像の生成除雪オペレータへ視認性の高い画像を提供するため に,雪なし画像にはパノラマ画像を使用する.撮影時 に
2
台のWeb
カメラを用い,撮影を終えた後に2
枚 の画像からパノラマ画像を作成する.その後,作成さ れたパノラマ画像と位置情報の組を生成して,雪なし図7 現在地付近の推定と雪なし画像の探索 Fig. 7 Method of current location search.
画像データベースを構築する.
こ の パ ノ ラ マ 画 像 は
OpenCV [20]
を 利 用 し て ,SURF
アルゴリズムにより作成する.また,雪なし画 像データベースにはSpatiaLite [21]
を採用している.SpatiaLite
は位置情報を使った検索に対応したデータ ベース管理システムであり,Android
でも利用するこ とができるSQLite [22]
をもとに構築されている.位 置情報とパノラマ画像を紐づけるために,雪なし画像 を撮影した地点ごとに,SpatiaLite
のデータベース上 には位置情報とパノラマ画像のファイルパスの両方を 含むエントリが生成される.3. 3
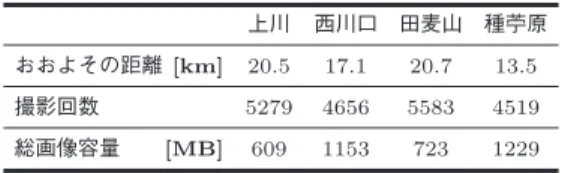
雪なし画像の探索図
7
に本システムにおける現在地付近の雪なし画像 の探索方法を示す.本システムでは,除雪車の進行方 向と位置情報,それぞれの雪なし画像と現在地との距 離から表示する画像を決定する.まず,図のように
GPS
から得られる除雪車の現在 地を中心とした円状(例:半径10[m]
)の探索範囲を 設定する.次に,除雪車の進行方向とデータベース上 に存在する雪なし画像の方向を比較し,探索範囲に属 している同方向の雪なし画像を抜粋する.最後に,抜 粋された雪なし画像と除雪車の現在地との距離を比較 し,最も近傍に存在する画像を現在地の雪なし画像で あると決定する.3. 4
アラート処理アラート処理のブロック図を図
8
に示す.除雪経路 や除雪オペレータによって,危険箇所や特に気をつけ なければならない箇所(例:マンホールなど)は異な る.例えば,初心者の除雪オペレータに対しては道路 設備の位置を覚えてもらうために,全ての道路設備に ついてアラートを出す(音を鳴らす)ように設定する図8 アラート処理のブロック図 Fig. 8 Block diagram of Alert Method.
必要がある.一方,熟練の除雪オペレータは全ての道 路設備の位置を覚えているため,全ての道路設備につ いて音を鳴らしていると除雪作業への集中を妨げる 要因となる.そのため,特に危険な道路設備について のみ,その位置を再確認するために音を鳴らす程度と した方が良い.そこで,事前に除雪オペレータが除雪 中に音を鳴らして欲しい箇所を選ぶことで,それぞ れの危険箇所に対応する.つまり,除雪オペレータは
Android
タブレット上で撮影した雪なし画像を確認しながら,マンホールや崖などの特に注意したい箇所を 登録する.
除雪作業中に設定した箇所に近づくと,
Android
タ ブレットから注意喚起を促すアラート音声が再生され る.このアラート機能によって,除雪オペレータは危 険箇所や,忘れやすい道路設備の箇所での道路状況の 確認を促すことができる.4.
除雪車の固有動作への対応図
9
に除雪中の除雪車の様子を示す.除雪車は個人 の敷地などへ乗り入れることができないという制約上,雪を捨てられる場所が限られ,その場所へ道路上の積 雪を運ぶために,前後進を繰り返す傾向がある.特に ドーザタイプの除雪車においてこの動作が顕著であり,
画像検索の追従性を高めるために,前進であるか後退 であるかということを判定する必要がある.除雪車の 作業対象は前方であるため,雪の運び残しがないよう に一時的に後退しているときでも,除雪オペレータに 提示されるべき画像は除雪車の前方である.後退を正 しく判定できなかった場合,後退中に後方の画像が除 雪オペレータに提示される結果となる.
しかしながら,
GPS
による位置情報だけでその判 定を行うのは難しいため,本システムではGPS
とと図9 除雪車の固有動作
Fig. 9 Action of snow-blower when removes snow.
もにジャイロスコープセンサを使って後退とターン検 出を行っている.以下にそれぞれの検出方法を述べる.
4. 1
ターン検出GPS
のみでは位置情報は分かっても車体が向いて いる方向を判断するのは難しい.一方,ジャイロス コープセンサは角速度を検知することができ,そこか ら旋回した角度を求めることができる.また,車体が180[deg]
近く旋回したということが分かれば,この動 作がターンであることを判定できる.そこで,ジャイロスコープセンサから得られた旋回 角がターン検出へ利用できるか判断するために,自動 車とジャイロスコープセンサ付き
Android
タブレッ トを用いた実験を行った.使用したAndroid
タブレッ トはXperia Tablet Z [16]
であり,自動車のダッシュ ボード上に設置して,同じ角度のターンについて5
回 試行した.図
10
は自動車の動作例であり,図11
が実際にAn-
droid
タブレットのジャイロスコープセンサから導出された旋回角である.ターンを始めると旋回角は上昇 し始め,ターンが終わると
180[deg]
付近で収束してい ることが分かる.しかしながら,図
10
のような動作の場合,90[deg]
付近でも一度収束している.よって,旋回角が非定常 状態の間に
180[deg]
付近(例:150[deg]
)のしきい値 を超えたらターンであると検出し,しきい値を超え る前に収束してしまった場合は,一定時間以上(例:10[sec]
)定常(例:変化が5[deg]
以内)であればター ン以外(右左折,急なカーブなど)であるとした.4. 2
後 退 検 出除雪車の進行方向は複数回続けて取得した
GPS
座標 から求めることができるが,その移動方向が180[deg]
図10 クイックターン Fig. 10 Quick turn.
図11 ジャイロスコープターン時特性 Fig. 11 Gyroscope values during turning by a vehi-
cle.
近く変更するという状態はターン若しくは後退以外に ないと考えられる.すなわち,ターンしていないのに もかかわらず進行方向が大きく変化した場合は,後退 であると判定できる.そこで,以下の手順で進行方向 を決定する(図
12
).(
1
)GPS
から現在の座標を得たとき,ログデー タから前回と前々回得た二つの座標を抜き出す.(
2
) 三つの座標から最小2
乗法により線形関数を 求める.(
3
) 導出された線形関数,前々回と現在の座標に よって移動方向を決定する.また,この進行方向の変位から後退検出を行えるか 判断するために,自動車と
GPS
・ジャイロスコープセンサ付き
Android
タブレットを用いた実験を行った.使用した
Android
タブレットはXperia Tablet Z
で あり,ダッシュボード上に設置して,前後進の繰り返 しを5
回施行した.図
13
は実験中のジャイロスコープセンサから導出 された旋回角であり,図14
は進行方向の変化量を表 したものである.図13
から分かるように,旋回角は ほぼ0
に等しく前後進では自動車の旋回が検出されな い.また,図14
より進行方向は前進と後退が切り替 わるたびに180[deg]
付近まで変化することが分かる.図12 位置情報を利用した最小2乗法による移動方向の 導出
Fig. 12 Derivation of direction angle by least-squares method.
図13 前後進ジャイロ特性
Fig. 13 Gyroscope values during going and backing.
図14 進行方向の変化
Fig. 14 Change amount of direction angle during go- ing and backing.
この結果,ターンが検出されずに進行方向が
180[deg]
付近まで変化したら後退であると判断できることが分 かった.
そこで,移動方向を
GPS
位置情報が新たに得られ るたびに逐次導出し,以前導出された移動方向との角 度が180[deg]
付近になり,ターンが検出されていな い場合,後退であると検出する.また同様の方法で,後退状態から前進状態へ移ることを検出することがで きる.
図15 画像探索の状態遷移図
Fig. 15 State machine diagram of snow-blower navi- gation.
4. 3
提案システムの状態遷移除雪車のターン・前後進検出に対応した画像探索の 状態遷移図を図
15
に示す.図から分かるように,四つ の状態で構成されており,雪なし画像を検索するタイ ミングに合わせて状態を変更する.以下にそれぞれの 状態の処理動作を示す.なお,初期状態は“Re-load”
である.
• Front search:
前回表示した画像よりも前方に存在する画像を検索対象にする.
• Back search:
前回表示した画像よりも後方に存在する画像を検索対象にする.
• Re-load:
移動方向に関係なく除雪車の現在地に一番近い画像を選択する.
• Not found:
現在地付近に撮影した画像が存在しないことを表示し,
“Re-load”
と同様の処理を行う.5.
実 証 実 験提案したシステムの有効性を評価するために,新潟 県長岡市川口地域・山古志地域の除雪業者の協力を得 て,
2013
年12
月から2014
年2
月までと2014
年12
月から2015
年1
月まで評価実験を行った.まず,シ ステム構築のために除雪経路の撮影実験を行い,その データをもとに雪なし画像データベースを作成した.また,データベースを組み込んだ
Android
タブレット 向けアプリケーションを開発し,実証実験を行った.5. 1
雪なし画像撮影5. 1. 1
撮影実験の作業内容撮影実験は,
2
台のWeb
カメラ(Logitec HD We- bcam C615 [23]
)とGPS
受 信 機(GlobalSat BU- 353S4 [24]
)をノートPC
にUSB
接続して行った.図16 生成したパノラマ画像の例 Fig. 16 Example of panorama image.
表1 撮影実験の結果
Table 1 Result of recording experiment.
上川 西川口 田麦山 種苧原 おおよその距離[km] 20.5 17.1 20.7 13.5 撮影回数 5279 4656 5583 4519 総画像容量 [MB] 609 1153 723 1229
3. 1
で述べたように,除雪業者が普段除雪している 経路を巡る形で自動車で走行し撮影を行った.また,除雪車の視点と同じ高さになるように,
Web
カメラ は3[m]
の高さに合わせて自動車の屋根に設置した.GPS
データの取得タイミングである1[sec]
ごとに撮 影を行い,Web
カメラの撮影範囲に入らなかった路 面がないよう密に画像データを生成できるように平均20[km/h]
で走行した.このため,道路画像は約6[m]
ごとに生成された.撮影後に
3. 2
の方法でパノラマ画 像を生成した.5. 1. 2
撮影実験の結果図
16
は生成したパノラマ画像の例である.パノラ マ画像から,除雪オペレータが現在地の詳しい道路状 況を把握できることが分かる.とりわけ,マンホール の位置や道路の幅,建物の位置関係などを広い視認性 により簡単に理解することができる.撮影実験の結果を表
1
に示す.上川地域において撮 影実験中に走行した距離は約20.5[km]
であり約1.5[h]
かかった.また,総画像サイズが
623[MB]
であるた め,Android
タブレットの内蔵ストレージのみでも雪 なし画像データベースを組み込むことができた.こ れらの地点全てを統合しても3714[MB]
であり,十分Android
タブレットの内蔵ストレージに組み込むことができる.
5. 2
雪なし画像システムの表示5. 2. 1
表示実験の作業内容撮影実験のデータをもとに,
Android
タブレット(
Xperia Tablet Z [16]
)にアプリケーションを構築し,図17 提案システムの様子
Fig. 17 Situation of Snow-Blower Navigation.
除雪車へ設置した.除雪オペレータには普段どおり に除雪をしてもらい,除雪中にアプリケーションを利 用してもらう.そして,実験を終えてから,除雪オペ レータへのインタビューを通してシステムの有効性の 評価を行う.
5. 2. 2
表示実験の結果図
17
に設置したシステムの様子を示す.実験を通 して除雪オペレータから肯定的な意見を頂いており,特に,まだ除雪経路を完全に記憶しきれていない若手 の除雪オペレータに効果的であるという評価を得た.
また,
1[sec]
ごとの画像表示でも十分に効果を発揮す ることが分かった.システムへの要望としては,雪捨 場の詳細な画像や除雪車後方部を確認できるバックカ メラが欲しいという意見を頂いた.5. 3
走行ログによる除雪作業の見える化実証実験を通して,
Android
タブレットを使って作 業中の除雪車の位置情報をログ出力した.除雪管理の 観点から扱いやすい情報として提供するために,除雪 ログデータを時空間的に解析した.また,アラート機 能の有効性を評価するために,アラート機能のログを 解析した.なお,ここで使用している降雪量データは 同時期に実験を行っていた[25]
の研究成果を参考にし ている.5. 3. 1
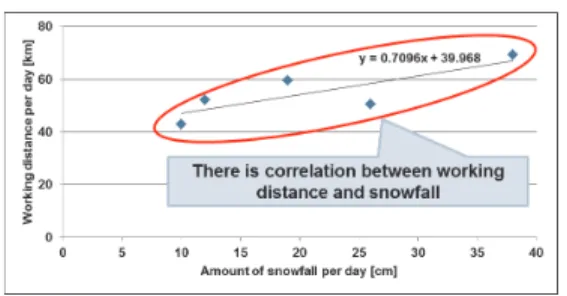
降雪量と走行距離の定量化図
18
は日ごとの降雪量と日ごとの除雪車走行距離 との関連を示す散布図である.2013
年から2014
年の 間に上川地域の除雪車が出動した12/19
,1/18–1/20
,2/5
のデータから構成されている.なお,2013
年度冬 季は例年より雪の降った日が少なく,走行距離のデー タが正しく取得できたのは上記の5
日のみであった.図から分かるように,走行距離と降雪量には正の相 関(相関係数
=0.81
)があり,ある日の走行距離から1
日の降雪量を類推することができる.また,降雪量 に対して走行距離が大きい場合には何かしらの異常が 発生していることを,この散布図によって除雪管理者図18 除雪車の走行距離と降雪量の関係 Fig. 18 Working distance vs. amount of snowfall.
図19 除雪車の走行トラッキングログ(2013/12/29) Fig. 19 Tracking data of snow-blower’s work (2013/12/29).
も把握することができる.
5. 3. 2
除雪困難箇所の見える化図
19
に12/29
の除雪車走行ログをプロットした地 図を示す.作業中の全ての座標をプロットしているが,特に集中している地域に注目してみると,非常に多く の前後移動を繰り返していることが分かる.これは,
図中の現場写真からも分かるように,道が狭く建物が 集中していることが原因であり,
4.
でも述べた除雪車 自身が走行するための場所の確保や限られた場所へ雪 を運ぶために前後移動を繰り返すためである.しかしながら,この地図では地域差が判別できず,
プロットも密集してしまいあまり直感的ではない.そ こで,見える化を図るために,このデータをもとにそ れぞれの地域ごとに除雪にかかった時間から作成した
3D
グラフを図20
に示す.この
3D
グラフは除雪対象地域内を30 × 30[ m
2]
ご とに分割し,分割した地域内に存在するプロット数を 数え上げたものである.GPS
は1[sec]
ごとに定期的 に位置情報を計測し,計測のたびにログデータに3D
グラフ上の1
プロット分の位置情報が記録される.こ のように,除雪車の作業時間が1[sec]
長くなるたびに ログデータに生成されるプロットの数が1
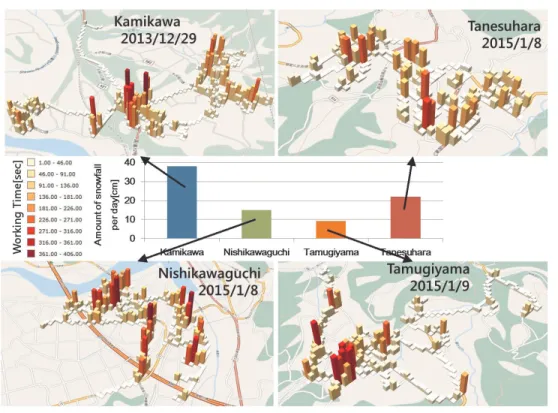
増加するた め,除雪作業に長く時間がかかっている場所ほど多く図20 それぞれの地域における除雪車滞在時間と出動日の降雪量 Fig. 20 Each heavy load area for Snow-Blowers and snowfall.
のプロットが存在する結果となる.このグラフから除 雪に多くの時間がかかっている地域を判断することが でき,雪捨場の整備などの施策への参考となる.
また,西川口について注目してみると,それ以外の 地域では密集していた除雪困難箇所が広い範囲に点在 している.これは,他の地域に比べて西川口に住宅街 が多いことが原因であると考えられる.
また降雪量においても,西川口は他の地域に比べて 少なめであり,積雪量も他の地域よりも少ない.除雪 対象道路の延長も他の地域よりも一番少ないが,困難 箇所の多さを省みると一番手間がかかっているのは西 川口であると考えられる.このことから,積雪量や降 雪量の違いよりも除雪対象地域の環境が除雪作業に与 える影響が大きいことが予想できる.
したがって,雪捨場の整備などの除雪環境を整える ことで円滑かつ安全に除雪作業が行えることが分かる.
5. 3. 3
アラート機能の利用状況今回の実証実験では,上川地域で除雪作業を担当し ている一つの除雪業者の
1
名の除雪オペレータに,ア ラート機能を使っていただいた.図21
に,この除雪業 者の除雪オペレータが上川地域の除雪経路においてア図21 除雪経路とアラート登録された地点 Fig. 21 Map of alert point and snow removal route.
ラート登録した地点を地図上で表している.実験中の 登録数は
15
箇所であり,内容はマンホール14
箇所,グレーチング
1
箇所であった.なお,グレーチングと は鋼材を格子状に組んだ溝蓋であり,道路の排水路に かける蓋としてよく使われている.図20
と比較して みると,特定の地域で滞在が長い地域ともある程度合 致するため,危険箇所での作業が続くことが予想され図22 マンホール登録地点のパノラマ画像 Fig. 22 Dangerous man-hole in panorama image.
図23 グレーチング登録地点のパノラマ画像 Fig. 23 Dangerous grating in panorama image.
る.このことからも,危険箇所の通知は役に立ってい ると考えられる.
図
22
,23
に,地図上に示した地点のマンホール,グレーチングを撮影したパノラマ画像を示す.パノラ マ画像上で,道路の端からマンホールまでの距離,グ レーチングの長さなどを視認することができ,アラー ト機能に重ねて雪なし画像を利用することでより安全 性を高められることが分かる.また,これらの情報を 記録することができるため,除雪作業に慣れていない 若手の除雪オペレータに危険箇所を伝えることにも利 用でき,教育的効果も見込まれる.
6.
む す び本論文では,除雪車の安全な運用・管理を目的に,
Android
タブレットを用いたシステムを提案した.提案システムは,
GPS
とジャイロスコープセンサか ら除雪車の現在地と進行方向を推定し,雪が積もって いないときの道路状況を記録した画像を提供する.特 に,提案システムは除雪車の特徴的な動作(例:前後 進の繰り返し)に対してセンサデータを使ってターン と前後進を検出することで位置推定を行っている.ま た,除雪作業の見える化のためにGPS
位置情報をロ グデータとして保存する.加えて,道路設備等に除雪 車が近づいた際に注意喚起をするアラート機能も備え ている.豪雪地帯における提案システムの評価実験を通して,
除雪経路を記憶しきれていない初心者の除雪オペレー タに効果的であることが分かった.提案システムは豪 雪地帯のみならず,例年はあまり雪が降らず除雪オペ レータの習熟が困難な地域では特に効果的と考えられ る.また,
GPS
のログデータの解析から,除雪車の1
日の走行距離とその日の降雪量には正の相関があるこ とを定量的に明らかにした.更に
3D
グラフを使った見える化により,特に除雪 に時間がかかっている地域を割り出し,道路幅が短く 建物が集中している地域においてより時間がかかって いることが分かった.このような除雪困難箇所の見え る化によって,除雪に多くの時間がかかっている地域 を判断することができ,雪捨場の整備などの施策への 参考となる.加えて,積雪量や降雪量の違いよりも除雪対象道路 の環境が除雪に与える影響が大きいことが分かり,雪 捨場の完備など除雪環境を整えることで円滑かつ安全 に除雪車による除雪を行えることを示した.
アラート機能の利用状況の確認から,一つの除雪対 象地域について
15
箇所危険箇所が存在し,その内14
箇所がマンホール,1
箇所がグレーチングであること を明らかにした.このように,除雪車により破壊され る可能性のある道路設備の位置を,熟練した除雪オペ レータの知見などに基づき事前に登録することで,初 心者でも除雪作業中に危険箇所を把握することができ,教育的効果も見込まれる.
今後は,オンライン化を図り,
Web
上で容易に走行 ログの解析結果が確認できるような,除雪車の集中管 理機能について検討する.最後に,本研究にご支援頂いた,長岡市川口支所,
長岡市山古志支所,(有)綱建設,(株)川口土建,(有)
大渕商事,(株)大久保土建,金井度量衡(株)の各位 に感謝致します.なお,本研究費の一部は平成
25
年 度地域ICT
振興型SCOPE
の支援(132304002
)を 受けて実施した.文 献
[1] 沢田 輝,林 国勝,平嶋善隆,“HTML5による車載 HMI開発,”富士通テン技報,vol.31, no.1, pp.28–30, 2014.
[2] 小島祥子,目黒淳一,鈴木徳祥,寺本英二,“汎用GPS と車載カメラ画像を用いた高精度地図生成手法の提案:基 本概念と可能性検討,”信学技報,ITS2010-73 March 2011.
[3] 今井 武,柘植正邦,菅原愛子,“インターナビ・フロー
ティングカーシステムと渋滞予測について,”国債交通安 全学会誌vol.31, no.1, pp.39–45, 2006.
[4] 廣瀬智博,山崎 理,伊藤宏平,高橋克彦,市原尚彦,“AR と画像認識を搭載したナビゲーションシステムの開発,” PIONEER R&D, vol.21, no.1, pp1–10, 2012.
[5] 秋 田 県 秋 田 市 ,“除 雪 作 業 車 両 追 跡 MAP,” http://
akitashi-jyosetsu.ndsoft.jp/public/map/, accessed Oct. 26, 2014.
[6](株)桑原測量社,“除雪管理システム,” http://www.
kuwa-soku.co.jp/sysimg/sys presen/4 1.pdf, accessed Oct. 26, 2014.
[7] 山本 寛,久保田祐介,西間木哲,久蔵 健,山崎克之,
“Androidを活用した除雪車支援アプリケーションの検討,” 信学技報,IA2013-10, June 2013.
[8] 久保田祐介,山本 寛,星 立人,山崎克之,“タブレット を活用した除雪車支援システムの開発と実証実験・評価,” 信学技報,IA2014-89, Jan. 2015.
[9](一社)日本建設機械施工協会,“経験者から学ぶ除雪車運 転操作上達のかんどころ,” http://www.niigata-inet.or.
jp/jcmahoku/hokuriku/bunken.htm, accessed Oct.
26, 2014.
[10] 国土交通省,“効果的・効率的な除雪,” http://www.mlit.
go.jp/road/ir/ir-council/yukimichi/pdf/18.pdf, ac- cessed Jan. 20, 2015.
[11] 長 岡 市 ,“平 成 26 年 2 月 20 日 専 決 補 正 予 算 の 概 要 ,” http://www.city.nagaoka.niigata.jp/shisei/
cate03/zaisei/file/h25h-07 0220.pdf, accessed Jan.
20, 2015.
[12] 島田 悟,東 佑亮,池田克也,庭野和浩,“除排雪経費 に係る基本料金支払い精度の導入について,”平成26年 度 北陸地方整備局 事業研究発表会V VI, no.13, July 2014.
[13] Google, Inc., “Google Maps,” https://maps.google.
com/, accessed Oct. 26, 2014.
[14] Google, Inc., “Street view – Google maps,” https:
//www.google.com/maps/views/streetview, accessed Oct. 26, 2014.
[15] 浦澤克己,藤巻 聡,“ロータリ除雪車の情報化施行技術の 開発,”建設マネジメント技術,2014年7月号,pp.71–75, 2014.
[16] Sony Mobile Communication Inc., “Xperia(TM) Tablet Z,” http://www.sonymobile.com/global-en/
products/tablets/xperia-tablet-z/, accessed Oct. 26, 2014.
[17] R. Hoang, J. Hegie, and F.C. Harris Jr., “Scrybe: A tablet interface for virtual environments,” 23rd In- ternational Conference on Computer Applications in Industry and Engineering (CAINE) 2010, SNA 2010 Workshop, pp.105–110, Nov. 2010.
[18] 鈴木友基,梶 克彦,河口信夫,“クラウドソーシングによ る屋内構造地図情報の構築と収集,”信学技報,MoMuC 2011-27, Nov. 2011.
[19] 青木僚児,山本 寛,井口惠一,山崎克之,“Androidと PHSを利用した病院内ガイダンスシステムの開発と評価,” 信学技報,IA2013-68, Jan. 2014.
[20] Intel Willow Garage, “OpenCV,” http://opencv.jp/, accessed Oct. 28, 2014.
[21] A. Furieri, “SpatiaLite,” http://www.gaia-gis.it/
gaia-sins/, accessed Oct. 28. 2014.
[22] D.R. Hipp, “SQLite,” http://www.sqlite.org/, ac- cessed Oct. 28.
[23] Logitech Inc., “HD Webcam C615,” http://www.
logitech.com/en-us/product/hd-webcam-c615?crid=34, accessed Oct. 28.
[24] GlobalSat WorldCom Co., “BU–353 Cable GPS with USB interface,” http://www.globalsat.com.tw/
products-page.php?menu=2&gs en product id=2&gs en product cnt id=28, accessed Oct. 28.
[25] 小林誠也,山本 寛,星 立人,山崎克之,“降積雪セン サーネットワークの開発と実証実験・評価,”信学技報,
IA2014-86, Jan. 2015.
(平成27年1月26日受付,5月24日再受付)
久保田祐介 (学生員)
平25長岡技術科学大学・電気電子情報 工学課程卒.現在,長岡技術科学大学大学 院・工学研究科・修士課程在籍中.
山本 寛 (正員)
平18九工大・大学院情報工学研究科情報 システム専攻博士後期課程修了.博士(情 報工学).同年(株)富士通研究所入社.平 22から長岡技術科学大学電気系助教.セ ンサネットワーク技術,オーバレイネット ワーク技術,グリッドコンピューティング 技術の研究に従事.IEEE会員.
山崎 克之 (正員:フェロー)
昭55電通大・通信卒.博士(情報工学).
KDD(現KDDI)(株)においてNo.7,
ISDN,ATM,IP,携帯,ユビキタスなど 情報通信ネットワーク及びマルチメディア 通信応用の研究開発・実用化と国際標準化 に従事.(株)KDDI研究所研究戦略室長を 経て平18から長岡技術科学大学電気系教授.