異常検知のための自己組織化ネットワークとその監視映像への適用
6
0
0
全文
(2) Vol.2015-MPS-105 No.5 2015/9/29. 情報処理学会研究報告 IPSJ SIG Technical Report. 南里らは立体高次局所自己相関特徴(Cubic High-order. Node Network. Local Auto-Correlation; CHLAC)特徴 [4] を用いて,人物 の歩行動作を正常動作,走行動作と転倒動作を異常動作と. input stimuli. 定義した実験において,複数の人物が映る動画像から異常 output. 動作を検出することに成功している [5].Xiang らは屋内と 屋外で撮影された動画像内での人物の行動パターンについ. Input Image. Network Layer. Network. てのモデルを学習し,学習データにはなかった行動パター. 図 1: 提案手法の構造例. ンを異常として検出する手法を提案している [6].また,近. Fig. 1 The structure of the proposed method.. 年では人が多く存在する混雑シーンにおける異常検知の 研究 [7], [8], [9] も盛んに行われており,Mahadevan らは. 環境の正常性を表現するために利用していること,Staufer. mixture of dynamic textures[10] を用いて時空間特徴に関. らの手法では正常性の表現力に乏しいことから,映像内の. する正常モデルを構築し,歩道の混雑シーンにおいて車両. 背景が周期的に変動する旋回カメラなどで撮影された映像. などの異常を検出することができることを示している [11].. に対して適用することは困難が予想される.旋回カメラに. これら多くの先行研究では事前に構築された正常モデルが. よる異常検知が可能となれば,固定カメラより広範囲な監. 固定であり,異常検知の適用中に更新されることはない.. 視を行うことができたり,決まったルートを巡回する警備. しかし,現実世界での運用を考えると,天候によって照明. ロボットへの応用が行えるなど,より多種類の場面で適用. 条件が変わることで正常パターンが変化したり,学習デー. することが可能となりさらなる有用性が期待できる.. タには出現しなかった正常パターンが出現する場合など,. そこで本論文では,固定カメラと視点が移動する旋回カ. 事前に構築した固定の正常モデルだけでは正確に映像内の. メラを想定した 2 種類の監視映像を対象に異常検知を行. 正常性を表現することが難しいと考えられる.したがって,. う,より環境への適応性が高い自己組織化ネットワークを. 異常検知をより頑健に行うには,適用中の環境に応じてモ. 提案する.提案するネットワークは,環境からの入力刺激. デルの更新が行われる環境に適応的な手法が望まれる.そ. に応じてノードの生成,削除,またノード状態の更新を行. こで本論文では,異常検知の適用中にモデルの更新が行わ. うことで環境の正常性を表現する.実験では固定カメラと. れる手法を提案する.. 一定周期で視点が移動する旋回カメラを想定した 2 種類の. 環境に適応的な異常検知手法の例としては Masland ら. 監視映像を用いて,映像内に現れる歩行者と車両を異常と. の Grow When Required(GWR)ネットワークが挙げら. して定義した侵入物体検知問題に提案手法を適用し,従来. れる [12], [13], [14].GWR ネットワークでは頻繁に観測. 手法と比較することで性能の検証を行う.. される入力刺激に対して,馴化モデルである Stanley モデ ル [15] を用いてネットワークの出力を次第に減少させて いくことで環境の正常性を表現する.GWR ネットワーク. 2. 自己組織化ネットワークによる異常検知 2.1 概要. を移動ロボットに搭載し,ソナーセンサ情報を入力刺激と. 提案する異常検知モデルの構造例を図 1 に示す.提案手. して扱った実験では,ロボットがそれまで観測していた環. 法では,同一構造の自己組織化ネットワークが入力画像中. 境とは異なる環境に置かれるとネットワークが強い出力を. に格子状に整列している.本論文では m × n 画素に対して. 示すことが確認されている.また,Nehmzow らは GWR. 1 つのネットワークを配置しており,例えば入力画像サイ. ネットワークの入力刺激に画像情報を用いた異常検知実験. ズが M × N 画素の場合,入力画像中には. を行っている [16], [17].しかし,GWR ネットワークは単. トワークが配置される.. 純な構造のため,環境に変動が含まれるような場合に対し. M m. ×. N n. のネッ. 各ネットワークは複数のノードによって構成される.. て適用することは難しいと考えられる.武田らは環境から. ノード i は,重みベクトル v i ,時刻 t における馴化係数. の入力パターンに対する反応とそのパターンが生じる領域. hi (t),年齢 agei (t) をもち,重みベクトルは環境からの入. に対する反応の抑制によって,環境に変動を含む監視映像. 力刺激と同次元数の [0.0, 1.0] の実数値,馴化係数はノード. 内の侵入物体を検知するネットワークモデルを提案してい. がどの程度環境に馴化しているかを表す [0.0, 1.0] の実数. る [18].Staufer らは画素ごとに混合ガウス分布を用いて環. 値,年齢はノードの年齢を表す非負の整数値である.. 境の背景のモデル化を行っている [19].この手法では,混. 提案手法では,入力画像中の各格子領域から算出した画. 合ガウス分布を用いることで背景の揺らぎなどを多峰性の. 像統計量を入力刺激として対応する各ネットワークに入力. 分布で表現しつつ,パラメータ更新によって環境変化への. する.そして,ネットワーク内でその入力刺激と類似した. 適応も実現している.これらの手法は固定カメラからの映. 重みベクトルをもつノードの選択を行い,選択されたノー. 像を用いた侵入物体検知問題に対して優れた性能を示して. ドの年齢と馴化係数の更新を行う.さらに選択されたノー. いる [18].しかし,武田らの手法では映像内の位置関係を. ドの入力刺激との類似度と馴化係数の値に応じて,ネット. ⓒ 2015 Information Processing Society of Japan. 2.
(3) Vol.2015-MPS-105 No.5 2015/9/29. 情報処理学会研究報告 IPSJ SIG Technical Report. ワーク内にノードを追加することで環境の正常性を表現す. t Initialize. る構造を構築していく.そして,ノードの類似度を用いて 環境内の刺激に対する応答値をネットワークごとに非負の Input image. 実数値で出力することで異常検知を行う.. 2.2 処理の流れ 図 2 に提案手法の処理の流れを示す.処理の詳細につい. Compute stimuli. Update nodes. Select nodes. Create a new node?. N. Y Update age of selected nodes. ては次の通りである.. Create node. 1 全てのネットワークを次の手順で初期化する. Compute output. (a)ネットワークに I 個のノードを生成する.. Delete nodes. (b)各ノードの重みベクトルをあらかじめ算出した入力 Normal or Abnormal. 刺激からランダムに選択する. (c)各ノードの馴化係数 hi (0) を 1.0 にする.. 図 2: 提案手法の処理の流れ. (d)各ノードの年齢 agei (0) を 0 にする.. 2 全てのネットワークについて,入力動画像の 1 フレー ム毎に以下の(a)から(h)の処理を繰り返す. (a)ネットワークが配置された格子領域から入力刺激を. Fig. 2 Flowchart of the proposed method.. 判定する. (e)ネットワーク内で最大の類似度 Dmax であるノード. 算出し,ネットワークに入力する.入力刺激は格子. max の馴化係数 hmax (t) を式(4)によって更新する.. 領域内の画素値から算出した平均,中央値などの画. なお,max = arg max(Di ),γ は定数である.. 像統計量を用いる.全ての入力刺激は [0.0, 1.0] に正 規化される. (b)ネットワーク内のすべてのノードについて,入力刺 激との類似度が大きい上位 S 個のノードを選択する. ノード i における類似度 Di の算出には式(1)を用 いる.. i. hmax (t + 1) = hmax (t) − γDmax. (4). ここで,馴化係数 h(t) はそのノードが環境の入力刺 激に対してどの程度馴化しているかを表す指標であ り,処理ステップ(g)において新たなノードをネッ トワークに追加するか否かの指標となる.馴化係数 の更新式(4)には入力刺激との類似度を用いており,. Di = exp(−|x − v i |). (1). ここで,Di はノード i の入力刺激 x との類似度,v i はノード i がもつ重みベクトルである.式(1)は, 類似度 Di が大きいノードほど入力刺激と類似した重. 環境からの入力刺激と類似した重みベクトルをもつ ノードの馴化係数は 0 に近づいていく. (f)現フレームで選択された上位 S 個以外のノードの. agei を式(5)によって更新する. agei (t + 1) = agei (t) + 1. みベクトルをもっていることを示す. (c)選択された S 個のノードの年齢 agei (t) を 0 にする. 式(2)における i は選択された S 個のノードのイン デックスを表す.. agei (t) = 0. (2). (d)各格子領域に対するネットワーク l の出力値 Ol は. (5). (g)式(6)を満たす場合,新たなノード k をネットワー クに追加する.. D. max. < Dthr. hmax < Hthr. (6). このとき,ノード k の重みベクトルは入力刺激 x と. 選択された S 個のノードの類似度を用いて,式(3). ノード max の重みベクトル v max との平均値とし,馴. によって算出される.. 化係数の初期値 hk (0) は 1.0,年齢の初期値 agek (0). D c(1) Ol = ∑ S−1 D i=1. は 0 とする.ネットワークが式(6)を満たすことは,. (S = 1) c(i) Dc(i+1). (3). (otherwise). ある程度ネットワークの更新が行われているにも関 わらず環境からの入力刺激を表現するノードがネッ. c(i) は現フレームで選択された上位 S 個のノードの. トワーク内に存在しないことを示している.このこ. インデックスのうち,i 番目に類似度が大きいノード. とから,環境の刺激をより正確に表現するために,環. のインデックスである.本論文では映像内における. 境の入力刺激を利用して新たなノードをネットワー. 出現頻度が少ない刺激や特徴が大きく異なる刺激を. クに追加する操作を行っている.. l. 異常として定義しているため,出力値 O がしきい値. Othr より小さい場合,その格子領域を異常であると ⓒ 2015 Information Processing Society of Japan. (h)agei の値がしきい値 agethr より大きい場合,ノー ド i をネットワークから削除する.. 3.
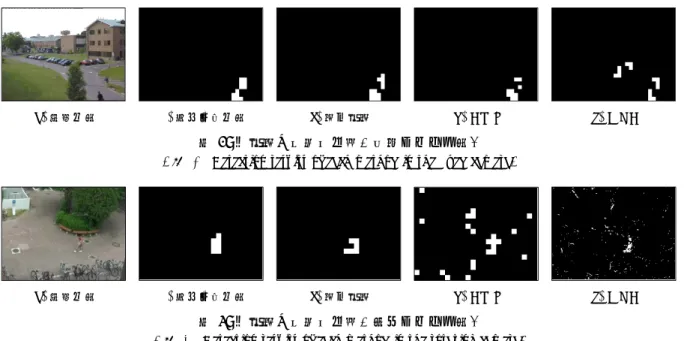
(4) Vol.2015-MPS-105 No.5 2015/9/29. 情報処理学会研究報告 IPSJ SIG Technical Report. 3. 固定カメラと旋回カメラを想定した映像か らの侵入物体検知実験. 表 1: 提案手法に関するパラメータ Table 1 Parameter settings for the proposed method.. 3.1 概要. パラメータ. 提案する自己組織化ネットワークの有効性を検証するた め,屋外監視映像内に現れる歩行者と車両を異常として定 義した侵入物体検知問題に提案手法を適用し,先行研究と の比較を行う.対象とした屋外監視映像は,固定カメラか. 固定. 旋回. 初期化時のノード数 I. 20. ノードの選択数 S. 1. 馴化係数の更新係数 γ. 0.1. ノード追加の馴化係数しきい値 Hthr. 0.1. 最大年齢 agethr. 800. ら撮影された監視映像と一定周期で視点が移動する旋回カ. ノード追加の類似度しきい値(モデル適用時)Dthr. メラを想定した 2 種類の監視映像である.比較に用いた手. ノード追加の類似度しきい値(モデル構築時)Dthr. 0.6. 0.925. 法は,文献 [12] で提案された GWR ネットワーク(以下,. 出力値のしきい値 Othr. 0.76. 0.7. 0.1. GWR),Stauffer らの手法 [19] に対して直近の入力フレー ムを重視した更新を行う混合ガウス分布を用いた背景モデ. 3.3 固定カメラからの監視映像による侵入物体検知. ルの手法 [20](以下,MOG)を用いた.. 3.3.1 実験設定. 各実験で用いた提案手法のパラメータを表 1 に示す.こ. 固定カメラからの監視映像には,PETS2001 データセッ. れらのパラメータは次節 3.2 で説明する F 値が最大となる. ト中の DATASET2 TESTING CAMERA1 を使用した.. ように,事前に行った実験によって決定した.提案手法と. 用いた画像は 320 × 240 画素のカラー画像である.提案手. GWR の入力刺激には,格子領域内の画素値の平均,最大. 法と GWR では 10 × 10 画素に 1 つのネットワークを配置. 値,最小値,レンジ,中央値,第一四分位数,第三四分位. したため,画像サイズからネットワーク数は 768 である.. 数の 7 種類の統計量を RGB カラー画像,RGB エッジ画像. この動画像では手前の樹木が風によって揺れており,また. のそれぞれから算出した計 42 次元の特徴量を用いた.. 背景にちらつきなどのノイズがみられる.固定カメラ映像 の例を図 3a に示す.. 3.2 評価方法. 歩行者と車両が現れない開始から 300 フレームまでを提. まず,異常検知性能の定量評価を行うために,監視映像. 案手法と比較手法のモデル構築期間とし,301 フレームか. 内に現れる歩行者と車両を対象に正解画像を作成した. さ. ら 1800 フレームまでをモデル適用期間とする.なお,正. らに,提案手法と GWR では画像内の格子領域単位の出力. 解格子画像は 301 フレームから 1800 フレームまで 10 フ. であるため,作成した正解画像から正解格子画像を作成し. レームおきに作成し,計 150 フレーム分を用意した.. た.正解格子画像は,正解画像を提案手法および GWR と. 3.3.2 実験結果. 同様のサイズの格子領域に分割し,格子領域内に占める正. 図 3 に各手法による検出結果例を示す.なお,MOG は. 解画素の割合が 0.1 以上の格子領域を正解格子領域とする. 格子領域単位に変換した結果を示している.図 3 の結果か. ことで作成した.1 つの格子領域サイズが 10 × 10 画素と. ら,提案手法では手前の揺れている樹木領域への過検出を. した場合の正解格子画像の例を図 3b,図 4b に示す.ま. 抑制しつつ,歩行者を検出できていることがわかる.MOG. た,画素単位で出力する MOG と評価方法を揃えるために,. では樹木領域で生じる多様な入力パターンを適切にモデル. MOG による検出画像を同じサイズの格子領域で分割し,. 化できなかったため,樹木領域に対して過検出してしまっ. 格子領域内に占める検出画素の割合が同じく 0.1 以上の格. ている.GWR は提案手法と同様に樹木領域に対して過検. 子領域を MOG による検出格子領域と定義する.. 出を抑制できているが,歩行者に対して検出漏れをしてし. 本論文では作成した正解格子画像をもとに,式(7)で示 される再現率(R) ,適合率(P ) ,F 値(F )の指標を用い. まう場合が多くみられた. 再現率,適合率,F 値による定量評価結果を表 2 に示す.. て定量評価を行う.なお,過剰な過検出結果をノイズとし. なお,正解格子領域数は正解画像 150 フレーム分に対して. て除外するために,物体の侵入によって生じた過検出格子. 1732 である.表 2 から提案手法は GWR と比べて再現率,. 領域は検出格子領域から除外した.. 適合率において優れており,MOG と比べると適合率で同 等程度の性能を示していることがわかる.しかし,再現率. R=. C C 2·R·P , P = , F = Ca A R+P. において提案手法は MOG より低い値となっている.これ. (7). は,背景と類似した色情報をもつ歩行者領域に対して検出 漏れをしてしまっていることが原因だと考えられる.提案 手法では映像内の色情報をもとに映像内の正常性を記述す. C は正しく検出した格子領域数,Ca は正解格子領域数,A. るため,背景の色情報と類似している侵入物体に対しては. は検出した格子領域数である.. 検出が抑制されてしまう.これは今後,入力刺激に時空間. ⓒ 2015 Information Processing Society of Japan. 4.
(5) Vol.2015-MPS-105 No.5 2015/9/29. 情報処理学会研究報告 IPSJ SIG Technical Report. (a) 入力画像. (b) 正解格子画像. (c) 提案手法. (d) GWR. (e) MOG. 図 3: 各手法の検出結果例(固定カメラ映像) Fig. 3 Detection results of each method in the fixed camera.. (a) 入力画像. (b) 正解格子画像. (c) 提案手法. (d) GWR. (e) MOG. 図 4: 各手法の検出結果例(旋回カメラ映像) Fig. 4 Detection results of each method in the rotating camera.. 表 2: 検出結果に対する定量評価(固定カメラ映像). 表 3: 検出結果に対する定量評価(旋回カメラ映像). Table 2 Recall, Precision and F-measure on the fixed camera.. Table 3 Recall, Precision and F-measure on the rotating camera.. Proposed. GWR. MOG. 再現率. 0.838. 0.656. 0.897. Proposed. GWR. MOG. 適合率. 0.868. 0.758. 0.874. 再現率. 0.806. 0.553. 0.567. 0.885. 適合率. 0.825. 0.639. 0.684. F値. 0.815. 0.593. 0.620. F値. 0.853. 0.703. 特徴を使用し,入力刺激の時間的な変化も考慮することで 解決が可能であると考える.. つつ,侵入物体である歩行者を検出できていることがわか る.一方で,GWR と MOG では変動する背景領域に対し. 3.4 旋回カメラを想定した映像による侵入物体検知. て過検出する場合が多くみられた.これは変動する背景の. 3.4.1 実験設定. 多様な状態を適切にモデル化できなかったためだと考えら. 本論文では,固定カメラから撮影された映像を用いて擬. れる.. 似的な旋回カメラ映像を作成した.具体的には,一定速. 次に再現率,適合率,F 値による定量評価結果を表 3 に. 度のウィンドウによって固定カメラ映像内から画像を切. 示す.なお,正解格子領域数は正解画像 100 フレーム分に. り出すことで,擬似的な旋回カメラ映像(以下,旋回カメ. 対して 566 である.表 3 から提案手法は再現率,適合率,. ラ映像)を用意した.今回は 320 × 240 画素の動画像から. F 値において他の 2 手法と比べて高い値を示していること. 240 × 180 画素の動画像を作成した.対象とした環境では. がわかる.再現率は比較手法と比べて約 24%以上,適合率. 映像内の左右上下から歩行者が映像内に出現する.図 4a. は約 14%以上優れている.以上の結果から,提案手法は旋. に旋回カメラ映像の例を示す.. 回カメラ映像において比較手法より高い異常検知性能を示. 3.3 の実験と同様に提案手法と GWR では 10 × 10 画素. すことが確認された.. に 1 つのネットワークを配置したため,画像サイズから ネットワーク数は 432 である.歩行者が出現しない開始か. 3.5 考察. ら 1000 フレームまでを各手法のモデル構築期間とし,歩. 固定カメラでの実験において,提案手法は図 3 に示し. 行者が出現する 1001 フレームから 2000 フレームまでを. たように風によって揺れている樹木領域への過検出を抑制. モデル適用期間とする.正解格子画像は 1001 フレームか. しつつ,侵入物体を検知できている.このことを定量的に. ら 2000 フレームまで 10 フレームおきに作成し,計 100 フ. 評価するため,手前の樹木領域における過検出数を 301 フ. レーム分を用意した.. レームから 1800 フレームの 1500 フレーム分について調べ. 3.4.2 実験結果. た.その結果,過検出数が提案手法では 179,GWR では. 図 4 に各手法における検出結果例を示す.図 4 の結果. 301,MOG では 402 となった.このことから,提案手法は. から,提案手法では変動する背景領域への過検出を抑制し. 他の 2 手法と比べて変動が生じる領域への過検出を抑制で. ⓒ 2015 Information Processing Society of Japan. 5.
(6) Vol.2015-MPS-105 No.5 2015/9/29. 情報処理学会研究報告 IPSJ SIG Technical Report. きていることがわかる.固定カメラ映像における樹木領域 への過検出の抑制結果と旋回カメラ映像における評価結果. [3]. から,提案手法は他の 2 手法と比べてより環境の変化に頑 健に異常検知を行うことができることが確認された.. [4]. このように提案手法が環境の変化に対して頑健に異常検 知を行えるのは,環境からの入力刺激との類似度を考慮し て環境の正常性を表現している点にある.まず,提案手法 では入力刺激と類似しているノードがネットワーク内に存. [5]. 在しない場合,入力刺激と類似したノードをネットワーク 内に追加することで環境の変化に適応する.固定カメラ映. [6]. 像における樹木領域や,旋回カメラ映像における背景領域 のように様々な入力刺激が観測される環境では,このノー. [7]. ド追加の操作によって環境の状態を表現するネットワーク を構築していく.次に,提案手法ではこの構築されたネッ トワーク内のノードと入力刺激との類似度を用いて出力値. [8]. を算出するため,環境内で特徴の異なる入力刺激に対して 出力値の正常度を抑制することができる.GWR では入力 刺激との類似度ではなく,出現頻度を考慮して異常判定を. [9]. 行うため,モデルの入力刺激に対する表現力が弱いといえ る.また MOG については,変動領域で観測される様々な. [10]. 入力パターンを背景として適切にモデル化できなかったこ とが過検出結果の原因だと考えられる.. [11]. 4. まとめ 本論文では,環境から入力される刺激に基づいて環境の. [12]. 正常性を表現し,異常検知を行うネットワークモデルを提 案した.提案手法では,環境からの入力刺激との類似度に. [13]. 応じてノードの追加,削除,状態の更新,また出力値を算 出することで環境の正常性を表現する.提案手法を固定カ メラと旋回カメラを想定した 2 種類の監視映像からの侵入. [14]. 物体検知問題に適用し,先行研究と比較を行った結果,環 境内の日常的な変動や周期的な変動がある領域への過検出 を抑制しつつ,異常である侵入物体を検知できることが確. [15]. 認された. 今後の課題として,長時間の監視映像への適用実験と, その実験を通じての精度向上が挙げられる.さらに,提案. [16] [17]. 手法の拡張として人物の異常動作検知や,混雑シーンにお ける適用などを検討したい.. [18]. 謝辞 本研究は,株式会社半導体理工学研究センター (STARC)の助成を受けて行われたものである.. [19]. 参考文献 [1]. [2]. Adam, A., Rivlin, E., Shimshoni, I. and Reinitz, D.: Robust real-time unusual event detection using multiple fixed-location monitors, IEEE Trans. PAMI, Vol. 30, No. 3, pp. 555–560 (2008). Basharat, A., Gritai, A. and Shah, M.: Learning object motion patterns for anomaly detection and improved object detection, Proc. IEEE International Conference on. ⓒ 2015 Information Processing Society of Japan. [20]. CVPR, pp. 1–8 (2008). Zhong, H., Shi, J. and Visontai, M.: Detecting unusual activity in video, Proc. IEEE International Conference on CVPR, Vol. 2, pp. 819–826 (2004). Kobayashi, T. and Otsu, N.: Action and simultaneous multiple-person identification using cubic higher-order local auto-correlation, Proc. the 17th International Conference on Pattern Recognition, Vol. 4, pp. 741–744 (2004). 南里卓也,大津展之:複数人動画像からの異常動作検出, 情処学論, コンピュータビジョンとイメージメディア, Vol. 46, No. 15, pp. 43–50 (2005). Xiang, T. and Gong, S.: Video Behavior Profiling for Anomaly Detection, IEEE Trans. PAMI, Vol. 30, No. 5, pp. 893–908 (2008). Mehran, R., Oyama, A. and Shah, M.: Abnormal crowd behavior detection using social force model, Proc. IEEE International Conference on CVPR, pp. 935–942 (2009). Saxena, S., Br´emond, F., Thonnat, M. and Ma, R.: Crowd behavior recognition for video surveillance, Advanced Concepts for Intelligent Vision Systems, pp. 970–981 (2008). Saligrama, V. and Chen, Z.: Video anomaly detection based on local statistical aggregates, Proc. IEEE Conference on CVPR, pp. 2112–2119 (2012). Chan, A. B. and Vasconcelos, N.: Modeling, clustering, and segmenting video with mixtures of dynamic textures, IEEE Trans. PAMI, Vol. 30, No. 5, pp. 909–926 (2008). Mahadevan, V., Li, W., Bhalodia, V. and Vasconcelos, N.: Anomaly detection in crowded scenes, Proc. IEEE International Conference on CVPR, pp. 1975– 1981 (2010). Marsland, S., Shapiro, J. and Nehmzow, U.: A selforganising network that grows when required, Neural Networks, Vol. 15, No. 8, pp. 1041–1058 (2002). Marsland, S., Nehmzow, U. and Shapiro, J.: Detecting novel features of an environment using habituation, Proc. Simulation of Adaptive Behavior, pp. 189–198 (2000). Marsland, S., Nehmzow, U. and Shapiro, J.: Environment-specific novelty detection, From Animals to Animats, the 7th International Conference on Simulation of Adaptive Behaviour, pp. 36–45 (2002). Stanley, J. C.: Computer simulation of a model of habituation., Nature, Vol. 261, pp. 146–147 (1976). Nehmzow, U. and Neto, H. V.: Novelty-based visual inspection using mobile robots, Proc. TAROS (2004). Nehmzow, U. and Neto, H. V.: Visual attention and novelty detection: Experiments with automatic scale selection, Proc. TAROS, pp. 139–146 (2006). 武田真人,矢田紀子,長尾智晴:映像監視のための環境 に適応的な異常検知ネットワーク,電子情報通信学会論 文誌,Vol. J94-D, No. 10, pp. 1631–1639 (2011). Stauffer, C. and Grimson, W. E. L.: Adaptive background mixture models for real-time tracking, Proc. IEEE International Conference on CVPR, Vol. 2 (1999). KadewTraKuPong, P. and Bowden, R.: An Improved Adaptive Background Mixture Model for Realtime Tracking with Shadow Detection, Proc. 2nd European Workshop on Advanced Video-Based Surveillance Systems (2001).. 6.
(7)
図

関連したドキュメント
わからない その他 がん検診を受けても見落としがあると思っているから がん検診そのものを知らないから
※ 硬化時 間につ いては 使用材 料によ って異 なるの で使用 材料の 特性を 十分熟 知する こと
・Squamous cell carcinoma 8070 とその亜型/変異型 注3: 以下のような状況にて腫瘤の組織型が異なると
と言っても、事例ごとに意味がかなり異なるのは、子どもの性格が異なることと同じである。その
【オランダ税関】 EU による ACXIS プロジェクト( AI を活用して、 X 線検査において自動で貨物内を検知するためのプロジェク
注)○のあるものを使用すること。
FSIS が実施する HACCP の検証には、基本的検証と HACCP 運用に関する検証から構 成されている。基本的検証では、危害分析などの
そして,我が国の通説は,租税回避を上記 のとおり定義した上で,租税回避がなされた
