1
第
1 章 序章
1.1 研究背景
工学分野の基幹となる構造物は,従来は機能性や性能,快適性を考慮し剛構造に設計す る事を主眼に置かれていた。しかし近年の技術的進歩や人口の過密化による土地の効率的 使用の観点から,建築物や橋梁といった構造物の高層化,長大化,軽量化が進んでいる。 これらの傾向に起因して構造物が柔軟化し構造物の振動問題が顕在化してきている。 振動問題は構造物の信頼性,精度,品質,寿命などを低下させるばかりでなく,安全性, 居住性,人体に与える振動障害や騒音公害など様々な問題を生じさせる。近年の機械・装 置や構造物の軽量・柔軟化傾向に伴い,より複雑な振動に対する制振技術が求められてい る。 また,産業ロボットや精密作業機械などの機械構造物の剛性問題に対してシステム的要 因も存在する。従来のロボットマニピュレータは運動学的制約が少なく,大きな作業領域 が確保できるシリアルリンク構造システムを採用してきた。シリアルリンク構造システム のマニピュレータは,ベースからエンドエフェクタまで 1 自由度のジョイントが直列に配 置され,それらすべてのジョイントが駆動される。この片持ち梁形状のマニピュレータシ ステムは,ジョイント部の角変位誤差がエンドエフェクタで拡大,累積されること,アー ムの曲げ剛性が低いこと,アクチュエータ・減速機の質量がアームの質量に加算されるこ とで慣性負荷が増加することが要因となり,精度や可搬重量,固有振動数が著しく低いと いう問題がある。2
1.2 研究目的
以上の背景より,本研究では橋やビルなどの構造物の振動制御とロボットや 6 自由度テ ーブルなどの構造物の高精度制御の2 つの問題について扱う。 振動の抑制に対して有効な技術として,圧電アクチュエータを用いた制振制御が研究さ れている。圧電アクチュエータを用いた平板の能動遮音に関する研究[2], [3]や,天井面を圧電 アクチュエータにより制振し,階上からの騒音を低減する制御システム[4]などがある。本研 究では圧電素子によるセルフセンシングアクチュエータを用いてセンサレスでの制振制御 を行うことを目的とする。セルフセンシングアクチュエータにより,アクチュエータ自身 がセンサの役割を担えるようになることで,低コスト,省スペース,センサとアクチュエ ータの完全な供配置によるコロケーションの問題の解消が実現できる。 また,マニピュレータシステムの高精度制御に対する従来の改善方法は,軽量・高強度, 高剛性の材料やアクチュエータの開発,または構造物の振動を抑制する制御システムの構 築[17], [18]である。近年,マニピュレータシステムそのものに対する改善が発案されている。 パラレルリンク構造システムと呼ぶ多自由度閉ループ機構を採用したシステムである。シ リアルリンク構造システムにはない高剛性,高精度,高い固有振動数が得られ,位置・姿 勢の6 自由度制御可能として,半導体や MEMS センサの製造装置などの精密作業機械の分 野において期待されている[21],[22]。しかし,閉ループ機構の幾何学的問題より順運動学を求 めることは非常に困難である。この問題から StewartPlatform 型パラレルリンク構造の順運 動学を求める研究[24],[25]や,アクチュエータ分解能から手先分解能を求める研究[26]などの研 究が行われている。本研究では CMOS イメージセンサ製造のためのパラレルリンク構造に よる 6 自由度ステージの開発を目的とする。チップの製造工程として,チップをテーブル に乗せてマシンビジョンからの絶対座標情報を基にアライメントをあわせてモールドする 作業が必要である。同様な工程の IC 製作では配線の導通をとることが目的であったが, CMOS センサ製作では,傾斜を含め座標系を確実に合わせこむ必要がある。この工程を高 精度で実行可能とする6 自由度テーブルの開発を目指す。 そこで本論文では柔軟構造システムに対するモデリングと制振制御とパラレルリンク構 造システムに対するモデリングと制御の 2 つの問題について研究を行う。本研究では制御 対象とする柔軟構造システムとして,ロボットマニピュレータや建築,土木の構造物に多 く採用される片持ち梁形状を使用した。この片持ち梁を対象とした能動的な振動減衰を目 的とする。手法としては直接速度フィードバックを用いた制振制御を行い,圧電アクチュ エータにより機械構造物の振動抑制に電気的減衰を付加する方法を用いる。また,パラレ ル リ ン ク 構 造 シ ス テ ム に StewartPlatform 型 パ ラ レ ル リ ン ク 構 造 を 使 用 し た 。 こ の StewartPlatform 型パラレルリンク構造を対象として,モデリングと制御法の開発を目的とす る。手法としては StewartPlatform 型パラレルリンク構造モデルに対し,パラレルリンク構3 造システムの課題点である分解能問題について検証を行う。 本論文は以下のような構成となっている。まず第 2 章で使用する片持ち梁と圧電アクチ ュエータについて述べ,片持ち梁振動実験装置の製作を行う。次に第 3 章で圧電アクチュ エータを用いた制振制御を行い,制振性能の比較検証を行う。第 4 章でパラレルリンク構 造システムと StewartPlatform 型パラレルリンク構造の概要と運動特性について述べる。最 後に第 5 章でパラレルリンク構造実験装置のモデリングを行い,制御における手法の解説 と分解能問題及び最大可動領域における検証を行う。 以上から,圧電アクチュエータを用いた制振制御方法と StewartPlatform 型パラレルリン ク構造のモデリングと制御方法を検討し,第6 章でまとめを述べる。
4
第
2 章 柔軟構造システム
第2 章では,柔軟構造システムについて述べる。2.1 節では柔軟構造システムの概要につ いて,2.2 節では本研究で使用する柔軟構造システムである片持ち梁の概要について述べる。 2.3 節では圧電アクチュエータの概要について述べ,2.4 節では本研究で使用する片持ち梁 振動実験装置を製作し,2.5 節で片持ち梁振動実験装置のゲイン特性を正弦波掃引法により 導出する。2.1 柔軟構造システムの概要
工学分野の基幹となる構造物は,従来において機能性や性能,快適性を考慮し剛構造に 設計する事を主眼に置かれていた。しかし近年の技術的進歩や人口の過密化による土地の 効率的使用から,建築物や橋梁といった構造物の高層化,長大化,軽量化が進んでいる。 これらの傾向に起因して構造物が柔軟化し構造物の振動問題が顕在化してきている。第 2 章及び第3 章ではこのような構造物を研究の対象とする。 柔軟構造システムの特徴として,外部からの入力に関わらない,構造物の持つ各振動モー ドに対応する固有周波数,減衰率,波動形が存在する。振動モードとは振動の形態を言い, 最低次の固有周波数で振動するモードを1 次モード,順次 2 次モード,3 次モードと呼ぶ。 固有周波数とは構造物が共振を起こす周波数であり,構造物の質量と剛性にのみ依存する, 構造物に固有のパラメータである。減衰率とは振動エネルギーの消散を表し,構造物の自 由振動応答が減衰していく割合を示すパラメータである。波動形は構造物がとある固有周 波数で振動するときの変位形状パターンである。5
2.2 片持ち梁の概要
本研究では制御対象とする柔軟構造システムに片持ち梁を使用し,この片持ち梁を対象 とした能動的な振動減衰について研究を行う。制振対象となる片持ち梁の寸法を図2.1 に示 す。梁の寸法は Jeffrey J. Dosch 氏らにより使用されている共振周波数を基に決定した[6]。 片持ち梁の固定方法は,2 枚の金属(30 × 30 × 6 [mm])で片持ち梁を挟み,片持ち梁と 2 枚の金属に開けた半径5.2 [mm]のネジ穴に直径 5 [mm]のネジを通しクランプした。 図2.1 片持ち梁の寸法6
2.3 圧電アクチュエータの概要
圧電セラミックスはチタン酸ジルコン酸鉛(Pb(Zr,Ti)O3)などを主な材料とし,PZT(ピ エゾ)と略され呼ばれている。変位分解能が高く,発生力が大きいといった特徴を持ち,ア クチュエータの他,ブザーや,センサ,マイク・スピーカーなどの音響変換子,超音波振 動子などの分野で用いられている。片持ち梁構造の圧電アクチュエータは電圧を加える事 で先端が変位し,位置決め素子として使用できる。本研究ではこの特性を利用し,制振制 御を行った。 そこで本節では,2.2.1 節から 2.2.3 節において圧電セラミックスについての基礎的性質 を説明する。後に2.2.4 節で本研究において使用した圧電アクチュエータについて説明する。2.3.1 圧電セラミックの基本動作
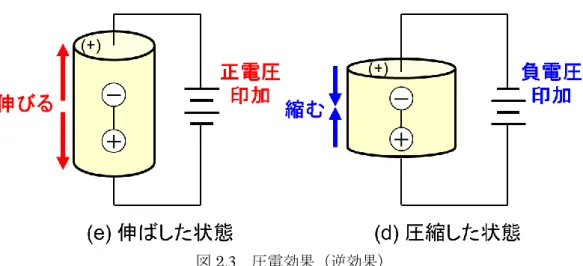
圧電素子とは機械的エネルギーを電気エネルギーに変換する圧電効果と,電気エネルギ ーを機械的エネルギーに変換する逆圧電効果の 2 つの特性を持つ素子である。圧電効果を 図2.2 に,逆圧電効果を図 2.3 に示す。圧電効果は外部から加えた歪みに対し電荷が生じる 現象である。また応力が加えられた際,応力比例の電界が発生する。反対に逆圧電効果は, 外部から加えた電荷に対し内部に歪みが生じる現象である。また電界を加えた際,電界比 例の歪みが発生する。 図2.2 圧電効果(正効果)7
8
2.3.2 バイモルフ型エレメントの構造
バイモルフ型圧電素子とはシムとよばれる金属弾性箔を2 枚の圧電セラミックスで挟ん だ構造をしている。そのため,力 F で屈曲させると一方が伸び,一方が縮むことで両素子 に電荷が発生し,それを電気的に取り出すように結線されている。バイモルフ型エレメン トにはシリーズ型とパラレル型がある。図2.4 にそれを示す。本研究ではシリーズ型エレメ ントを用いた。 図2.4 バイモルフ型エレメントの構造9
2.3.3 バイモルフ型エレメントの特性
表1 にバイモルフ型エレメントの特性を示す。本研究では片端固定のシリーズ型が該当 する。これらの関係式は3.3 節セルフセンシングアクチュエータによる DVFC にて使用し た。 表2.1 バイモルフ型エレメントの特性10
2.3.4 本研究で用いた圧電アクチュエータの概要
本研究にてアクチュエータとして使用したバイモルフ圧電素子の寸法と仕様を図 2.5 と 表2.2 に示す。 表2.2 圧電アクチュエータの仕様 PAB4010 変位量 500 [μm] at100 [V] 静電容量 450 [nF] 誘電損失 ≤ 3.0% 絶縁抵抗 ≥ 100 [MΩ] 形状 40 × 10 × 0.55 [mm] 図2.5 バイモルフ圧電素子の寸法11
2.4 片持ち梁振動実験装置の概要
この節では,片持ち梁振動実験装置の設計を行う。制振制御は厚さ 0.3 [mm]のアルミ板 を用いた片持ち梁に圧電アクチュエータを貼付することで行う。圧電アクチュエータの位 置は片持ち梁の応力が最大となる片持ち梁の固定端に貼付した。また実験における便宜性 のため,外乱振動用の圧電アクチュエータを制振用アクチュエータとは反対の面に貼付し た。 図2.6 に片持ち梁振動実験装置の概要,図 2.7 に外観を示す。 図2.6 片持ち梁振動実験装置概要 図2.7 片持ち梁実験装置外観12
2.5 正弦波掃引法による片持ち梁振動実験装置の共振周波
数の導出
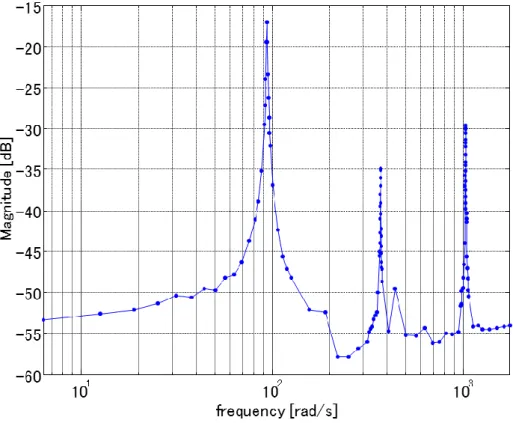
この節では,正弦波掃引法による片持ち梁振動実験機の共振周波数の導出を行う。表2.3 に片持ち梁の振幅測定において使用したマイクロレーザセンサの仕様を,表2.4 に実験条件 を示す。また,図2.8 に正弦波掃引法により導出した,片持ち梁振動実験機の周波数特性を 示す。正弦波掃引法を用いた共振周波数導出実験により,表2.5 に示す通り,1 次から 3 次 までの共振周波数が導出された。 本研究における制振対象は,騒音問題として挙げられる低域の周波数である 1 次共振と する。 表2.3 マイクロレーザセンサの仕様 ANR1250 測定範囲 ±10 [mm] スポット径(測定中心距離における代表値) 0.6 × 1.1 [mm] サンプリング周期 1 [kHz] 分解能 (2σ) 10 [μm] 表2.4 実験条件 入力信号 正弦波 入力振幅 10 [V] 出力 片持ち梁自由端の振幅 [mm] 計測周波数 1 – 300 [Hz] 表2.5 正弦波掃引法により導出した片持ち梁振動実験装置の特性の定量評価 共振周波数 [rad/s] ゲイン [dB] 1 次共振 93.62 -17.08 2 次共振 369.5 -34.89 3 次共振 1029 -29.6313
14
第
3 章 柔軟構造システムに対する制振制御
第3 章では柔軟構造システムに対する制振制御について述べる。 3.1 節ではシステム同定を行い片持ち梁振動実験装置の周波数特性を導出する。3.2 節で は前節で導出した周波数特性から直接速度フィードバック制御(DVFC)を用いた制振制御実 験を行う。3.3 節では前節の DVFC を用いたセルフセンシングアクチュエータによる制振制 御実験を行う。3.1 システム同定
プラントモデリングとは物理現象を支配する法則や数式を抽出し,様々な数式で系の挙 動を記述することである。モデリングは大別すると3 つに分けられる。第 1 に系を支配す る数式が明白であるホワイトボックスモデル,第 2 にモデルの内部構造に一部不明な点が 存在するグレーボックスモデル,第 3 にモデルの内部構造が不明であるブラックボックス モデルである。本研究では制御対象である柔軟構造物を第3 のブラックボックスと見立て, 入力信号と出力信号の実験データから系の数式モデルを作成する,システム同定法よりモ デリングを行う。 まず節3.1.1 で同定入力の選定について,次に節 3.1.2 で ARX モデルについて説明する。 そして節3.1.3 で M 系列信号によるシステム同定により,片持ち梁振動実験装置の周波数 特性を導出する。15
3.1.1 同定入力の選定
同定入力は同定精度に大きく影響するため,その選定作業は慎重に行わなければならな い。同定入力の選定には,対象の持つすべてのモードを励起できる周波数特性と対象の持 つ不感帯と飽和,センサ性能の SN 比を考慮した振幅特性について考慮しなければならない。 周波数特性について考慮した際,多数の周波数成分を含む白色性入力が望ましいが,理想 的な白色雑音は物理的に実現できない。そこで多くのシステム同定では,人為的にある規 則に基づいて生成された疑似不規則信号が使用される。特に線形システム同定を行う場合, 取り扱い易さから2 つの値のみを持つ 2 値信号が利用される。さまざまな擬似白色2 値信号(PRBS:Pseudo Random Binary Signal)が存在するが,そので もシステム同定入力信号として最もよく知られ,古くから利用されているものが M 系列 (Maximum-length linear shift register sequence)である。M 系列信号の作り方を以下に説明する。 周期 2n1 N の M 系列は,次式より生成することができる。 n k n k k k
a
x
a
x
a
x
x
1 1
2 2
1 (3.1) ただし,
は2 を法とする和を表す。16
3.1.2 ARX モデル
ARX モデル (autoregressive model with exogenous input) は,制御システムの同定に用いら れるモデルである。本項では,ARX モデルについて説明する。 差分方程式
)
(
)
(
)
1
(
)
(
)
1
(
)
(
k
a
1y
k
a
y
k
n
b
1u
k
b
u
k
n
e
k
y
n a n b b a
(3.2) において,外乱項 e(k)を白色雑音w(k)と仮定すると,)
(
)
(
)
1
(
)
(
)
1
(
)
(
k
a
1y
k
a
y
k
n
b
1u
k
b
u
k
n
w
k
y
n a n b b a
(3.3) が得られる。出力 y(k)は)
(
)
(
)
(
k
k
w
k
y
T
(3.4) と表現でき,ここで2 つの多項式 a a n nq
a
q
a
q
A
(
)
1
1 1
(3.5) a b n nq
b
q
b
q
B
(
)
1 1
(3.6) を導入する。ただし,A(q)とB(q)は既約なシフトオペレータ q の多項式である。式(3.5), (3.6)を用いて, ) ( ) ( ) ( ) ( ) (q y k B q u k wk A (3.7) この式で表されるモデルを ARX モデルという。これはシステム同定においてしばしば利用 される重要なモデルである。ARX モデルのブロック図を図 3.6 に示す。 図3.1 ARX モデル17
3.1.3 M 系列信号によるシステム同定
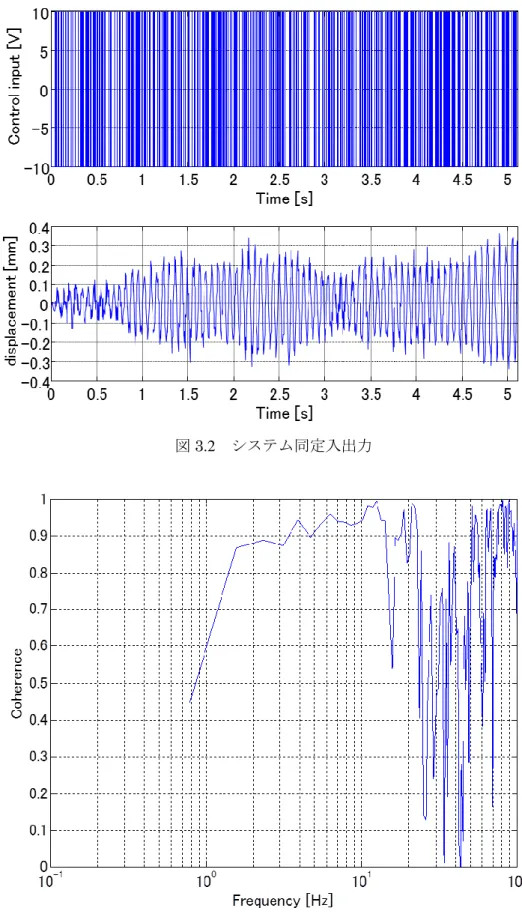
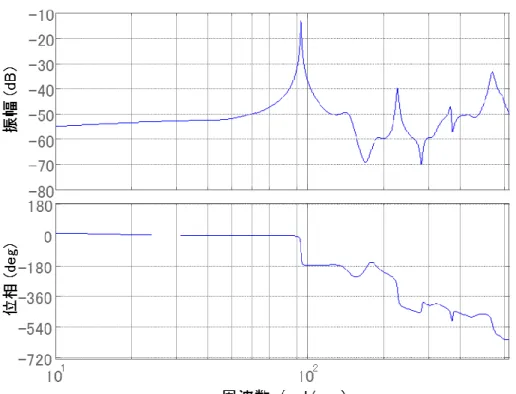
この項では第2 章で作成した片持ち梁振動試験機に対し,前節を基に同定実験を行う。 同定結果に関する図表を以下に示す。表3.1, 3.2 に実験条件を示す。図 3.8 は入出力信号の グラフ,図3.9 は入出力信号の相関を表すコヒーレンス,図 3.10 は同一入力に対する同定 出力と導出した ARX モデル(30 次)の出力結果を比較したグラフ,図 3.11 には ARX モデ ルの周波数応答特性を示している。図3.9 より,今回の制振対象である 1 次共振周波数付近 で高い相関が見られる。図3.10 より,ARX モデルのシミュレーション結果と実際の同定出 力はほぼ一致しているため,同定対象の特性がよく近似できていることが確認できる。図 3.11 からは,およそ 93.7 [ rad/s]で振動モードが確認できる。 以上の様に,片持ち梁振動実験機の30 次モデルが導出され,周波数特性を図示した。 表3.1 実験条件 サンプリング時間 5 [ms] 入力信号 PRBS 入力振幅 ± 10 [V] 加振時間 5.1 [s] 同定時間 12.6 [s] 周期 28-1 の 4 周期分 出力 片持ち梁の2 次モードの節における振幅 [mm] 表3.2 同定条件 同定モデル ARX model 次数決定法 クロスバリデーション モデル次数 30 次18
図3.2 システム同定入出力
19
図3.4 同定出力と ARX モデル出力比較
20
3.2 直接速度フィードバック制御(DVFC)
3.2.1 DVFC の概要
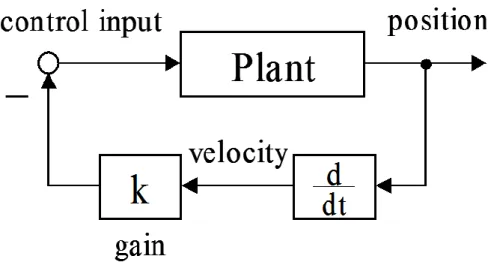
直接速度フィードバック制御(DVFC:Direct velocity feedback control)とは,コロケーシ ョンが成立する条件下において,速度情報を直接入力に負帰還するものである。これを施 すことにより減衰係数が増加し,減衰特性の向上が可能となる。また,速度は変位の微分 値,加速度の積分値とそれぞれの中間的なパラメータとなり,エネルギー散逸が基本であ る振動制御においては適応例が多い。DVFC の主な特長としては,機械的ダンパと同等の効 果があることや,全ての観測可能な振動モードが減衰できること,また,制御用モデルが 不要であり,モデル化誤差に対しても安定であるという点があげられる。図3.11 に片持ち 梁振動実験装置における DVFC 理論を示す。 今回使用した片持ち梁振動実験機においての数式モデルと安定条件を以下で導出する。 まず圧電アクチュエータ,平板系の運動方程式を (𝑀𝑠+ 𝑀𝑝)𝑦̈ + (𝐾𝑠+ 𝐾𝑝)𝑦 = 𝐹 + 𝑄𝑉𝑉𝑎 (3.8) と置く。ここで,𝑦は変位 [m],𝑀𝑠, 𝑀𝑝は片持ち梁,圧電アクチュエータの質量,𝐾𝑠, 𝐾𝑝は片 持ち梁,圧電素子のばね定数 [N/m],𝐹は片持ち梁に加えられる外力 [N],𝑉𝑎は印加電圧 [V], 𝑄𝑉は電気機械結合係数 [N/V]である。 (𝑀𝑠+ 𝑀𝑝)𝑦̈ − 𝑄𝑉𝑉𝑎+ (𝐾𝑠+ 𝐾𝑝)𝑦 = F (3.9) ここで,入力電圧𝑉𝑎を 𝑉𝑎= −𝐺𝑉𝑦̇ (3.10) とおく。𝐺𝑉は制御電圧の増幅係数である。これにより (𝑀𝑠+ 𝑀𝑝)𝑦̈ + 𝑄𝑉𝐺𝑉𝑦̇ + (𝐾𝑠+ 𝐾𝑝)𝑦 = F (3.11) となり,システムに減衰を付加することができる。 振動方程式(3.9)の 1 次項の係数 (𝑄𝑉𝐺𝑉) が正であれば DVFC によって振動を増幅すること は無い。すなわち安定条件は 𝑄𝑉𝐺𝑉> 0 (3.12) となる。
21
22
3.2.2 バンドパスフィルタを用いた DVFC
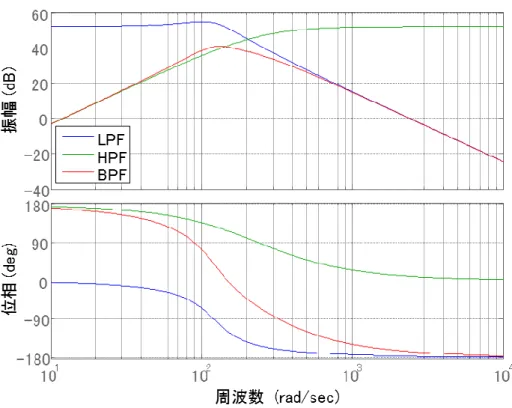
本実験装置の構成ではマイクロレーザセンサで計測した位置信号を速度信号に変換する 必要がある。位置から速度への変換は微分器を補償器に使用すれば良いが,それでは高周 波ノイズが増幅され,制御性能の劣化に繋がる。 そこで,制振対象の周波数付近のみ微分,すなわち DVFC を行い,それ以外の周波数帯 は信号の増幅を行わないようにする工夫としてバンドパスフィルタを用いた。バンドパス フィルタを,共振周波数付近で微分器特性,すなわち位相が90 度となり,かつゲインが他 の帯域より広帯域となるよう設計すれば,制振対象の周波数のみに DVFC を行うことがで きる。 設計においては,片持ち梁の1 次共振でのゲインを片持ち梁の振幅を 1/10 倍,すなわち 20 [dB]低減させることを目標としている。 バンドパスフィルタを設計する上で用いたローパスフィルタの伝達関数は 𝜔𝑙𝑐2 𝑠2 + 0.7654𝜔 𝑙𝑐𝑠 + ωlc2 (3.13) と設計した。また,ハイパスフィルタの伝達関数は 𝑠2 𝑠2+ 1.8478𝜔 ℎ𝑝𝑓𝑠 + 𝜔ℎ𝑝𝑓2 (3.14) と設計した。これより,バンドパスフィルタは 𝜔𝑙𝑐2𝑠2 (𝑠2 + 0.7654𝜔 𝑙𝑐𝑠 + 𝜔𝑙𝑐2)(𝑠2+ 1.8478𝜔ℎ𝑐 𝑠 + 𝜔ℎ𝑐2) (3.15) として設計される。なお,バンドパスフィルタには設計のし易さから,バターワース多項 式の係数を参照した。2 次のローパスフィルタと 2次のハイパスフィルタを直列に接続して, 4 次のバンドパスフィルタとしたので,バターワース多項式は 4 次の係数を参照した。 表3.3 にバンドパスフィルタの特性を示し,図 3.12 にバンドパスフィルタの周波数特性 を示す。 表3.3 バンドパスフィルタの特性 制振対象の共振周波数 90 [rad/s] LPF のカットオフ周波数𝜔𝑙𝑐 242.70 [rad/s] HPF のカットオフ周波数𝜔ℎ𝑐 121.35 [rad/s] 共振周波数における BPF の位相 90 [deg] 共振周波数における BPF のゲイン 54.8 [dB]23
24
3.2.3 DVFC による制振実験
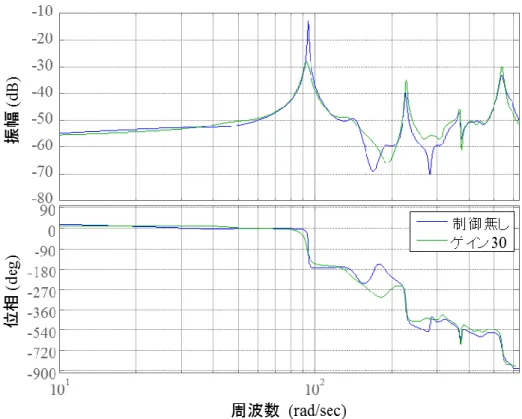
柔軟構造物に対するバンドパスフィルタを用いた DVFC の制振効果を実験を基に確認す る。表3.4, 3.5 に実験条件を,図 3.13 に実験結果として,制振制御を行わない場合と,バ ンドパスフィルタを用いた DVFC での制振を行う場合の片持ち梁振動実験機の周波数特性 の比較を,表3.6 にその定量評価を示す。図 3.13 と表 3.6 より,バンドパスフィルタを用 いた DVFC でピーク時のゲインを 15.41 [dB]低減させることができた。 表3.4 実験条件 サンプリング時間 5 [ms] 入力信号 PRBS 入力振幅 ± 10 [V] 加振時間 5.1 [s] 同定時間 12.6 [s] 周期 28-1 の 4 周期分 出力 片持ち梁の2 次モードの節における振幅 [mm] DVFC ゲイン Kp1 30 表3.5 同定条件 同定モデル ARX model 次数決定法 クロスバリデーション モデル次数 30 次 / 30 次 表3.6 実験結果の定量評価 ピーク時の周波数 [rad/s] ピーク時のゲイン [dB] 制御無し 93.75 -13.07 バンドパスフィルタを用いた DVFC 92.48 -28.4825
26
3.3 セルフセンシングアクチュエータを用いた DVFC
3.3.1 セルフセンシングアクチュエータの概要
セルフセンシングアクチュエータとは,単一素子にセンサとアクチュエータの機能を付 加させる技術である。本研究では2.2 節で述べた,圧電素子の圧電効果をセンサとして,逆 圧電効果をアクチュエータとして利用しセルフセンシングアクチュエータを組み込んだ。 このシステムの利点として,外部のセンサを必要としないため,軽量・小型化,低コスト であることや,センサとアクチュエータが完全な供配置となるため,コロケーションを考 慮する必要がないことが挙げられる。 図3.14 にセルフセンシングアクチュエータの概略を示す。ここで,f は外乱用圧電アクチ ュエータからの外力 [N],f’は制振用アクチュエータからの制振力 [N], y’は片持ち梁の変 位 [mm],Vpは圧電アクチュエータの圧電効果による電圧 [V],Vsは速度に比例した電圧 [V], u は制振信号[V],Vcはブリッジ印加電圧 [V],Vaは圧電アクチュエータへの印加電圧 [V] である。まず外力として f が加えられると圧電アクチュエータにひずみが生じ,圧電電圧と して Vpが起電する。それをブリッジ回路により,センサ電圧とアクチュエータ電圧が混在 する圧電電圧から,Vsとしてセンサ電圧を抽出する。そして DSP を用いたコントローラに より制振信号 u を出力し,ブリッジ印加電圧 Vcをブリッジ回路に印加する。ブリッジ回路 により,ブリッジ印加電圧に比例したアクチュエータ電圧を圧電アクチュエータに印加す ることができ,制振された結果として変位 y’を出力する。 図3.14 セルフセンシングアクチュエータ概略27
3.3.2 RC ブリッジ回路
一枚の圧電素子をセンサとアクチュエータとして用いる圧電素子を用いたセルフセンシ ングアクチュエータでは,圧電電圧にセンサ電圧とアクチュエータ電圧が混在する。そこ のため,ブリッジ回路を用いて両電圧を分離する必要がある。ブリッジ回路の種類によっ て抽出する信号が変化する。具体的には,CC ブリッジ回路と呼ばれる回路はひずみ信号, RC ブリッジと呼ばれる回路はひずみ速度信号を抽出する。今回の制振制御は DVFC を用い るので,ブリッジ回路は RC ブリッジ回路を用い,ひずみ速度を抽出した。 図3.15 に RC ブリッジ回路の回路図を示す。ここで,Vpを圧電素子の等価電圧源,Cpを 圧電素子の等価キャパシタンス,Vcをブリッジ印加電圧,Vaをアクチュエータ電圧,C を ダミーキャパシタンス,R1を抵抗,R2をブリッジ平衡条件のための調整抵抗としている。 この時,ブリッジ回路のセンサ電圧 Vsとアクチュエータ電圧 Vaは次式で与えられる。まず, 分圧式より V1, V2は 𝑉1= 𝑅1𝐶𝑝𝑠 1 + 𝑅1𝐶𝑝𝑠(𝑉𝑐+ 𝑉𝑝) (3.16) 𝑉2= 𝑅2𝐶𝑠 1 + 𝑅2𝐶𝑠𝑉𝑐 (3.17) と求められる。ここでセンサ電圧 Vsは 𝑉𝑠= 𝑉1− 𝑉2= 𝑅1𝐶𝑝𝑠 1 + 𝑅1𝐶𝑝𝑠𝑉𝑝+( 𝑅1𝐶𝑝𝑠 1 + 𝑅1𝐶𝑝𝑠− 𝑅2𝐶𝑠 1 + 𝑅2𝐶𝑠)𝑉𝑐 (3.18) であり,ブリッジ平衡条件 R2𝐶𝑝=R1C (3.19) が成立する時, 𝑉𝑠= 𝑅1𝐶𝑝𝑠 1 + 𝑅1𝐶𝑝𝑠𝑉𝑝 (3.20) となる。ここで,片持ち梁の振動の各周波数が 𝜔 ≪ 1 𝑅1𝐶𝑝 (3.21) となる時, Vs≈ 𝑅𝐶𝑝sVp (3.22) となる。センサ電圧Vsはひずみに比例して発生する圧電電圧Vpの一階微分であり,すなわ ちひずみ速度の検出ができることが分かる。 また,アクチュエータ電圧 Vaは分圧式より 𝑉𝑎= 1 1 + 𝑅𝐶𝑝𝑠𝑉𝑐 (3.23)28 となり,センサ電圧 Vsと同様に 𝜔 ≪ 1 𝑅𝐶𝑝 (3.24) である時, 𝑉𝑎≈ 𝑉𝑐 (3.25) となる。すなわちブリッジ印加電圧とほぼ同様のアクチュエータ電圧を印加できることが 分かる。 図 3.15 RC ブリッジ回路図
29
3.3.3 セルフセンシングアクチュエータによる制振実験
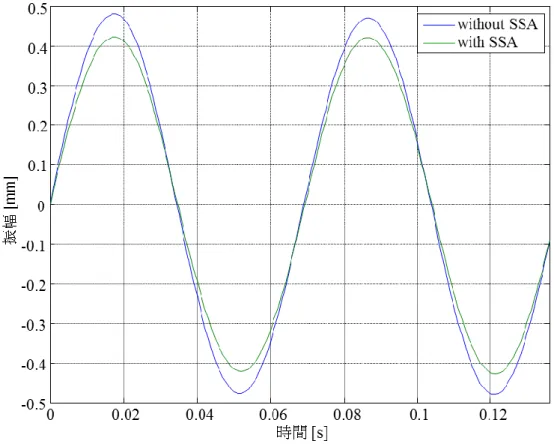
柔軟構造物に対するセルフセンシングアクチュエータを用いた DVFC の制振効果を実験 を基に確認する。表3.7 に実験条件を示す。そして図 3.16 に実験結果を,その定量評価を 表3.8 に示す。結果としてセルフセンシングアクチュエータを用いた制振制御により,片持 ち梁の振幅を 12.5%低減できた。現在は制御器として比例器のみ使用しているため,圧電 アクチュエータ,ブリッジ回路,電圧増幅器のみで制振制御が可能であると言える。 本研究ではブリッジ平衡条件(3.19)式を成立するために,抵抗𝑅1に可変抵抗を使用した。 そのため,平衡条件が完全ではなく(3.18)式における印加電圧𝑉𝑐の成分がセンサ電圧𝑉𝑠に残 ってしまった結果,制振精度に影響が出てしまったことが考えられる。この問題に対して, 外気の温度や湿度で大きく変化する圧電素子のキャパシタ𝐶𝑝に適応し,ブリッジ平衡条件 を常に保つ事が可能となるシステムの構築を今後の検討課題とする。 表 3.7 実験条件 制御対象 片持ち梁先端の振幅 サンプリング時間 1 [ms] 入力 制振用圧電素子への電圧 [V] ゲイン Kp1 30 出力 片持ち梁自由端の振幅 [mm] 表3.8 セルフセンシングアクチュエータを用いた DVFC の制御実験結果の定量評価 振幅 [mm] 制御無し 0.4823 DVFC with SSA 0.422230
31
第
4 章 パラレルリンク構造システム
第 4 章ではパラレルリンク構造システムの概要と StewartPlatform 型パラレルリンク構造 システムにおける概要及び運動学,そしてパラレルリンク構造実験装置について述べる。 4.1 節ではパラレルリンク構造システムの概要について述べ,4.2 節では本研究で使用する StewartPlatform 型パラレルリンク構造及び座標系について説明を行う。そして 4.3 節では本 研究で用いるパラレルリンク構造実験装置の概要について述べる。4.1 パラレルリンク構造システムの概要
ロボットマニピュレータ機構の多くはシリアルリンク構造と言う複数のリンクがジョイ ントを介し直列に連結し,先端部分にエンドエフェクタがある開リンク機構である。身近 な例で言えば人間の腕がある。上腕,前腕がリンクにあたり,肘や手首といった関節部分 がジョイント,そして手がエンドエフェクタにあたる。特徴として運動学的制約が少ない ことや大きな作業領域が確保できることがある。また自然界に存在する構造物の多くはシ リアルリンク機構であるため,直感的に構造や性質を理解し易い。 この機構とは逆にエンドエフェクタを複数のリンク機構を並列に駆動することで制御す る構造をパラレルリンク構造と呼ぶ。この構造は従来のマニピュレータ機構にはない,高 精度,高負荷,高剛性,高速性などの特徴を持ち,シリアルリンク構造では達成できなか った分野において期待されている [17]。図4.1 にシリアルリンク構造とパラレルリンク構造 を示す。表4.1 にパラレルリンク構造とシリアルリンク構造の比較を示す。 図4.1 シリアルリンク構造とパラレルリンク構造32 表 4.1 パラレルリンク構造とシリアルリンク構造の比較 パラレルリンク構造 シリアルリンク構造 作業領域 小さい 大きい 順運動学 困難 容易 逆運動学 容易 困難 順静力学 容易 困難 逆静力学 困難 容易 位置誤差 平均化 累積 力誤差 累積 平均化 最大力 全アクチュエータの出力の加算 最小アクチュエータにより制限 剛性 高い 低い 動力学 非常に複雑 複雑 慣性 小さい 大きい
33
4.2 StewartPlatform 型パラレルリンク構造
パラレルリンク機構の代表として StewartPlatform と呼ばれる構造がある。これは 1965 年 に D.Stewart が the Institution of Mechanical Engineers (UK)で公表した構造である[15]。本研究
ではこの StewartPlatform 型パラレルリンク機構を導入しパラレルリンク構造システムにつ いて研究を行う。
4.2.1 StewartPlatform 型パラレルリンク構造の概要
StewartPlatform とは独立に駆動する 6 本のリンクとリンクによって支えられた出力端であ るエンドエフェクタ及び基準座標系に固定されたベースプラットフォームによって構成さ れるパラレルリンク構造のひとつである。図4.2 に StewartPlatform 型パラレルリンク構造を 示す。リンクの両端はユニバーサルジョイントで接続されており,6 本のアクチュエータの 長さを独立に制御することによって,エンドエフェクタの位置・姿勢の6 自由度を空間内 で制御する事ができる。 以下に StewartPlatform における主な記号,座標系について説明する。 ・記号 𝐵𝑚 :ベースプラットフォームに接続されたリンクの中心の XYZ 座標 𝐶 :エンドエフェクタの重心の位置・姿勢を表す XYZ 座標系ベクトル 𝐸𝑚𝑜 :エンドエフェクタに接続されたリンクの中心の XYZ 座標 𝐸𝑚𝑒 :エンドエフェクタに接続されたリンクの中心の𝑋𝑒𝑌𝑒𝑍𝑒 座標 𝑙𝑚 :アクチュエータの長さ(𝐸𝑚𝑜 − 𝐵𝑚間の距離) 𝑚 :リンク番号を示す添え字 𝑂 :𝐵𝑚を通る円の中心(XYZ 座標原点) 𝑂𝑒 :𝐸𝑚eを通る円の中心 𝑅𝑜 :O を中心とした𝐵𝑚を通る円の半径 𝑅𝑒 :𝑅𝑒を中心とした𝐸𝑚を通る円の半径 𝑥, 𝑦, 𝑧 :C の XYZ 座標 γ, β, α :エンドエフェクタの姿勢を表す Z-Y-X オイラー角 𝜃𝑚, ∅𝑚 :𝐸𝑚𝑒の極座標系パラメータ 𝜓𝑚, 𝜑𝑚 :𝐵𝑚の極座標系パラメータ ・座標系 XYZ 座標系 :𝑂を中心とする基準座標系 𝑋𝑒𝑌𝑒𝑍𝑒 座標系 :C を中心とするエンドエフェクタ上の座標系34 ・ベクトル 𝐵𝑚 :[𝐵𝑚𝑥 𝐵𝑚𝑦 𝐵𝑚𝑧]T C :[𝑥 𝑦 𝑧 𝛼 𝛽 𝛾]T 𝐸𝑚𝑜 :[𝐸𝑚𝑥𝑜 𝐸𝑚𝑦𝑜 𝐸𝑚𝑧𝑜 ]T 𝐸𝑚𝑒 :[𝐸𝑚𝑥𝑒 𝐸𝑚𝑦𝑒 𝐸𝑚𝑧𝑒 ]T 図4.2 StewartPlatform 型パラレルリンク構造
35
4.2.2 StewartPlatform 型パラレルリンク構造の逆運動
学
シリアルリンク構造とパラレルリンク構造の双対性のひとつである,運動学の問題につ いて述べる。シリアルリンク構造では容易な順運動学の計算はパラレルリンク構造では困 難である。しかし,シリアルリンク構造では困難な逆運動学の計算は,パラレルリンク構 造では幾何学的条件から比較的容易に求めることができる。 逆運動学とは,作業空間におけるエンドエフェクタの状態からアクチュエータ空間での 状態,すなわちアクチュエータ変数の具体的数値を求める計算である。本研究で対象とな る StewartPlatform 型パラレルリンク構造では,エンドエフェクタの位置姿勢からアクチュ エータの変位を求める。以下にその計算を示す。図4.3 に StewartPlatform の座標系を示す。 XYZ 座標系は固定座標系でベースプラットフォーム上に固定する。𝑋𝑒𝑌𝑒𝑍𝑒 座標系は XYZ 座 標系に対して移動する座標系で,エンドエフェクタ上に固定する。図4.3 に示すパラメータ 𝑅𝑜, 𝜓𝑚, 𝜑𝑚を用いて極座標で表すと,ベースのジョイント位置は XYZ 座標系で以下のように 表せる。ただし𝑚 = 1~6とし,リンク番号を表す。 図4.3 StewartPlatform の極座標系36 𝐵𝑚= ( 𝐵𝑚𝑥 𝐵𝑚𝑦 𝐵𝑚𝑧 ) = ( 𝑅𝑜sin (𝜓𝑚)cos (𝜑𝑚) 𝑅𝑜sin (𝜓𝑚)sin (𝜑𝑚) 𝑅𝑜cos (𝜓𝑚) ) (4.1) 同様にエンドエフェクタのジョイントの位置をパラメータ𝑅𝑒, 𝜃𝑚, ∅𝑚を用いて極座標で表 すとエンドエフェクタのジョイントの位置は𝑋𝑒𝑌𝑒𝑍𝑒 座標系で以下のように表せる。 𝐸𝑚𝑒 = ( 𝐸𝑚𝑥𝑒 𝐸𝑚𝑦𝑒 𝐸𝑚𝑧𝑒 ) = ( 𝑅𝑒sin (𝜃𝑚)cos (∅𝑚) 𝑅𝑒sin (𝜃𝑚)sin (∅𝑚) 𝑅𝑒cos (𝜃𝑚) ) (4.2) 次に XYZ 座標系から𝑋𝑒𝑌𝑒𝑍𝑒 座標系の原点であり,エンドエフェクタの重心の位置を𝑥, 𝑦, 𝑧 と し, 姿勢をγ, β, αとすると,エンドエフェクタの位置・姿勢を表すベクトルは𝐶 = [𝑥 𝑦 𝑧 𝛼 𝛽 𝛾]𝑇となる。ここでγ, β, αはそれぞれ𝑋 𝑒𝑌𝑒𝑍𝑒 座標系の𝑋𝑒軸,𝑌𝑒軸,𝑍𝑒軸周 りに対する回転角を表す。ここで,ベクトル𝑋𝑐,行列 T を以下のように定義する。ただし, 𝑠𝑖𝑛(𝛼) = 𝑠𝛼, 𝑠𝑖𝑛(𝛽) = 𝑠𝛽, 𝑠𝑖𝑛(𝛾) = 𝑠𝛾, 𝑐𝑜𝑠(𝛼) = 𝑐𝛼, 𝑐𝑜𝑠(𝛽) = 𝑐𝛽, 𝑐𝑜𝑠(𝛾) = 𝑐𝛾とした。 𝑋𝑐 = ( 𝑥 𝑦 𝑧) (4.3) 𝑇 = ( 𝑐𝛼𝑐𝛽 𝑐𝛼𝑠𝛽𝑠𝛾 − 𝑠𝛼𝑐𝛾 𝑐𝛼𝑠𝛽𝑐𝛾 + 𝑠𝛼𝑠𝛾 𝑠𝛼𝑐𝛽 𝑠𝛼𝑠𝛽𝑠𝛾 + 𝑐𝛼𝑐𝛾 𝑠𝛼𝑠𝛽𝑐𝛾 − 𝑐𝛼𝑠𝛾 −𝑠𝛽 𝑐𝛽𝑠𝛾 𝑐𝛽𝑐𝛾 ) (4.4) ここで,行列 T は Z-Y-X オイラー角の回転行列である。このベクトル𝑋𝑐と行列 T を用い ると𝑋𝑒𝑌𝑒𝑍𝑒 座標系で表されたエンドエフェクタのジョイントの位置𝐸𝑚𝑒は XYZ 座標系で次式 のように表せる。 𝐸𝑚𝑜 = 𝑇𝐸𝑚𝑒 + 𝑋𝑐 (4.5) ここで,𝐸𝑚𝑜 =[𝐸𝑚𝑥𝑜 𝐸𝑚𝑦𝑜 𝐸𝑚𝑧𝑜 ]𝑇はエンドエフェクタのジョイントの位置を XYZ 座標系で表 したものであり,各要素は以下のように表せる。 𝐸𝑚𝑥𝑜 = (𝑐𝛼𝑐𝛽)𝐸𝑚𝑥𝑒 + (𝑐𝛼𝑠𝛽𝑠𝛾 − 𝑠𝛼𝑐𝛾)𝐸𝑚𝑦𝑒 +(𝑐𝛼𝑠𝛽𝑐𝛾 + 𝑠𝛼𝑠𝛾)𝐸𝑚𝑧𝑒 + x (4.6) 𝐸𝑚𝑥𝑜 = (𝑠𝛼𝑐𝛽)𝐸𝑚𝑥𝑒 + (𝑠𝛼𝑠𝛽𝑠𝛾 + 𝑐𝛼𝑐𝛾)𝐸𝑚𝑦𝑒 +(𝑠𝛼𝑠𝛽𝑐𝛾 − 𝑐𝛼𝑠𝛾)𝐸𝑚𝑧𝑒 + 𝑦 (4.7) 𝐸𝑚𝑥𝑜 = (−𝑠𝛽)𝐸𝑚𝑥𝑒 + (𝑐𝛽𝑠𝛾)𝐸𝑚𝑦𝑒 + (𝑐𝛽𝑐𝛾)𝐸𝑚𝑧𝑒 + 𝑧 (4.8) m 番目のアクチュエータの長さ𝑙𝑚はそれぞれ m 番目のエンドエフェクタのジョイント𝐸𝑚𝑜 とベースプラットフォームのジョイント𝐵𝑚の距離であるので, 𝑙𝑚2 = 𝑙𝑚𝑥2 + 𝑙𝑚𝑦2 + 𝑙𝑚𝑧2 (4.9) 𝑙𝑚= √𝑙𝑚𝑥2 + 𝑙𝑚𝑦2 + 𝑙𝑚𝑧2 (4.10) と表せる。ただし 𝑙𝑚𝑥= 𝐸𝑚𝑥𝑜 − 𝐵𝑚𝑥 (4.11) 𝑙𝑚𝑦= 𝐸𝑚𝑦𝑜 − 𝐵𝑚𝑦 (4.12)
37 𝑙𝑚𝑧 = 𝐸𝑚𝑧𝑜 − 𝐵𝑚𝑧 (4.13) である。 ここで,(4.10)式の右辺はエンドエフェクタの位置・姿勢を表す𝐶 = [𝑥 𝑦 𝑧 𝛼 𝛽 𝛾]𝑇 の関数であり,与えられたエンドエフェクタの位置・姿勢に対し,各アクチュエータの長 さ𝑙𝑚を求める事ができる。そこで,6 本のアクチュエータの長さ𝑙1, 𝑙2, 𝑙3, 𝑙4, 𝑙5, 𝑙6をベクトル を用いて𝑙 = [𝑙1 𝑙2 𝑙3 𝑙4 𝑙5 𝑙6]Tと表し,𝑓を逆運動学計算を行う関数として定義する ことで,エンドエフェクタの位置・姿勢と各アクチュエータ長さの関係をまとめて次式で 表す。 𝑙 = 𝑓(𝐶) (4.14)
38
4.2.3 StewartPlatform 型パラレルリンク構造の動力学
StewartPlatform 型パラレルリンク構造の動力学について Jacobian を用いて説明する。 Jacobian とはアクチュエータの微小運動とエンドエフェクタの微小運動との間の関係を示 す概念である。この概念によりマニピュレータの操作性の検討や外部環境とアクチュエー タとの関係を検討する事ができる。またマニピュレータの動的な特性を理解することに繋 がるので,制御系の構築に対しても重要な意味を持つ。ただし,パラレルリンク構造では シリアルリンク構造と異なり逆運動学によりエンドエフェクタの状態とアクチュエータの 状態との関係式を導いた。これにより,パラレルリンク構造の Jacobian は一般に Jacobian と呼ばれるシリアルリンク構造の Jacobian とは定義が異なり,シリアルリンク構造の Jacobian の逆行列に相当するものとなっている。 以下にその計算を示す。(4.14)式の両辺を時間に関して全微分すると 𝑙̇ = 𝐽(𝐶)̇ (4.15) 𝐽 ≡𝜕{𝑓(𝐶)} 𝜕𝐶 (4.16) となる。更に(4.9)式より(4.15)式を整理すると ( 𝑙1̇ 𝑙2̇ 𝑙3 𝑙4̇ 𝑙5̇ 𝑙6̇ ̇ ) = 𝐽 ( 𝑥̇ 𝑦̇ 𝑧̇ 𝛼̇ 𝛽̇ 𝛾̇) (4.17) を得る。ここで,𝐽の要素𝐽𝑚𝑛は次式で計算できる。ただし,𝑚 = 1~6でリンク番号を表し, 𝑛 = 1~6である。𝐽𝑚𝑛は𝐽の𝑚行𝑛列の要素を表す。 𝐽𝑚1= 𝑙𝑚𝑥 1 𝑙𝑚 (4.18) 𝐽𝑚2= 𝑙𝑚𝑦 1 𝑙𝑚 (4.19) 𝐽𝑚3= 𝑙𝑚𝑧 1 𝑙𝑚 (4.20) 𝐽𝑚4= (𝑙𝑚𝑥((−𝑠𝛼𝑐𝛽)𝐸𝑚𝑥𝑒 + (−𝑠𝛼𝑠𝛽𝑠𝛾 − 𝑐𝛼𝑐𝛾)𝐸𝑚𝑦𝑒 + (−𝑠𝛼𝑠𝛽𝑐𝛾 + 𝑐𝛼𝑠𝛾)𝐸𝑚𝑧𝑒 ) + 𝑙𝑚𝑦((𝑐𝛼𝑐𝛽)𝐸𝑚𝑥𝑒 + (𝑐𝛼𝑠𝛽𝑠𝛾 − 𝑠𝛼𝑐𝛾)𝐸𝑚𝑦𝑒 + (𝑐𝛼𝑠𝛽𝑐𝛾 + 𝑠𝛼𝑠𝛾)𝐸𝑚𝑧𝑒 ))𝑙1 𝑚 (4.21)39 𝐽𝑚5= (𝑙𝑚𝑥((−𝑐𝛼𝑠𝛽)𝐸𝑚𝑥𝑒 + (𝑐𝛼𝑐𝛽𝑠𝛾)𝐸𝑚𝑦𝑒 + (𝑐𝛼𝑐𝛽𝑐𝛾)𝐸𝑚𝑧𝑒 ) + 𝑙𝑚𝑦((−𝑠𝛼𝑠𝛽)𝐸𝑚𝑥𝑒 + (𝑠𝛼𝑐𝛽𝑠𝛾)𝐸𝑚𝑦𝑒 + (𝑠𝛼𝑐𝛽𝑐𝛾)𝐸𝑚𝑧𝑒 ) + 𝑙𝑚𝑧((−𝑐𝛽)𝐸𝑚𝑥𝑒 + (−𝑠𝛽𝑠𝛾)𝐸𝑚𝑦𝑒 + (−𝑠𝛽𝑐𝛾)𝐸𝑚𝑧𝑒 )) 1 𝑙𝑚 (4.22) 𝐽𝑚6= (𝑙𝑚𝑥((𝑐𝛼𝑠𝛽𝑐𝛾 + 𝑠𝛼𝑠𝛾)𝐸𝑚𝑦𝑒 + (−𝑐𝛼𝑠𝛽𝑠𝛾 + 𝑠𝛼𝑐𝛾)𝐸𝑚𝑧𝑒 ) + 𝑙𝑚𝑦((𝑠𝛼𝑠𝛽𝑐𝛾 − 𝑐𝛼𝑠𝛾)𝐸𝑚𝑦𝑒 + (−𝑠𝛼𝑠𝛽𝑠𝛾 − 𝑐𝛼𝑐𝛾)𝐸𝑚𝑧𝑒 ) + 𝑙𝑚𝑧((𝑐𝛽𝑐𝛾)𝐸𝑚𝑦𝑒 + (−𝑐𝛽𝑠𝛾)𝐸𝑚𝑧𝑒 )) 1 𝑙𝑚 (4.23) 𝐽は 6 行 6 列の偏導関数行列であり,この行列を 6 自由度パラレルリンク構造の Jacobian と呼ぶ。(4.16)式で定義される Jacobian は C だけの関数であるが,(4.18)~(4.23)で表され る Jacobian は C と𝑙の関数である。この Jacobian を用いる事によって一般的な形状の StewartPlatform 型パラレルリンク構造における各アクチュエータの速度とエンドエフェク タの速度を関係付ける事ができる。
40
4.3 パラレルリンク構造実験装置の概要
本研究で設計したパラレルリンク構造実験装置の概要について説明する。図4.4 にパラレ ルリンク構造実験装置の概要,図4.5 にパラレル実験装置のジョイント配置を示す。そして 表4.2 にパラレルリンク構造実験装置のパラメータ,表 4.3 にアクチュエータの仕様につい て示す。 図4.4 パラレルリンク実験装置概要41 図4.5 パラレルリンク構造実験装置のジョイント配置 表4.2 パラレルリンク構造実験装置のパラメータ Ro 50.25mm Re 39.75mm εb 19.78° εe 20.3° z @初期化時 118mm 表4.3 アクチュエータの仕様 ストローク 20mm 定格推力 1.5kgf 分解能 0.5um 最大速度 4mm/s 寸法 L 77mm
42
第
5 章 StewartPlatform 型パラレルリンク構造
の制御
第5 章では StewartPlatform 型パラレルリンク構造の制御方法,課題点について述べる。 5.1 節ではパラレルリンク構造実験装置に対するモーションコントロールについて述べ, 5.2 節では前節を基に Matlab を用いてパラレルリンク構造実験装置のモデルを作成する。 5.3 節では StewartPlatform 型パラレルリンク構造の課題点について述べ考察を行う。5.4 節 ではエンドエフェクタの可動領域の可視化について述べる。5.1 モーションコントロール
パラレルリンク構造実験装置におけるモーションコントロールの概要を図 5.1 に示す。こ こ で ,𝐶𝑟= [𝑥𝑟 𝑦𝑟 𝑧𝑟 𝛼𝑟 𝛽𝑟 𝛾𝑟]Tは エ ン ド エ フ ェ ク タ の 位 置 ・ 姿 勢 目 標 値 , 𝑙𝑟= [𝑙𝑟1 𝑙𝑟2 𝑙𝑟3 𝑙𝑟4 𝑙𝑟5 𝑙𝑟6]𝑇はアクチュエータの変位量を表す。パラレルリンク構造 実験装置のモーションコントロールは,逆運動学計算から各アクチュエータの変位量を求 め,モーションコントロールボードに動作指令として入力する。そしてコントロールボー ド内で指令からパルス信号を作成し,モータドライバユニットに入力することでモータを 制御する。 図5.1 パラレルリンク実験装置におけるモーションコントロールの概要43
5.1.1 直線補間機能
シリアルリンク構造では直列的,並列的に複数のモータが駆動しても目標値に到達する ことが可能である。しかしパラレルリンク構造では,幾何学的問題からすべてのアクチュ エータを同期して並列的に駆動しなければならない。そこで,本研究ではパラレルリンク 構造実験装置のモーションコントロールに直線補間機能を付加した。図5.2 に直線補間機能 の概要を示す。直線補間機能とは X 軸,Y 軸の 2 軸制御を行うとき,両軸を同期制御しな がら,合成軌跡が直線となるように目標値へ移動する機能である。この機能を入力が 6 変 数であるパラレルリンク構造実験装置に当てはめて考える。求められる機能は,6 本のアク チュエータの速度及び変位量の比率を一定に保ち,各目標値に同時に到達することである。 そこで6 本のアクチュエータの中で最も移動距離の長いアクチュエータをマスタ,残りの 5 本のアクチュエータをスレイブとし,マスタの指定移動距離を𝐷𝑀,任意のスレイブの指定 移動距離を𝐷𝑆,マスタの現在移動位置を𝑃𝑀,任意のスレイブの現在位置を𝑃𝑆とすると,マ スタとスレイブの関係は以下の式で表せる。 𝑃𝑀: 𝑃𝑆= 𝐷𝑀: 𝐷𝑆 (5.1) 図5.2 直線補間機能44
5.1.2 6 軸台形速度制御
本研究ではマニピュレータへの負荷を考慮し,6 軸補間機能に台形速度制御を使用した。 速度信号に台形波形を用いることで,アクチュエータの変位を S 字特性で駆動することが できる。図5.3 に台形速度制御による 6 軸直線補間機能の概要を示す。マスタの移動量を𝑙𝑀, スレイブの移動量を𝑙𝑆,マスタの速度を𝑉𝑀,マスタの加/減速度を𝐴𝑀とすると,加速終了時 間𝑡1,減速開始時間𝑡2は以下の値となる。 𝑡1= 𝑉𝑀 𝐴𝑀 (5.2) 𝑡2=𝑉𝑙𝑀 𝑀 (5.3) (5.1)式より,スレイブの速度𝑉𝑆及びスレイブの加/減速度𝐴𝑆は, 𝑉𝑠 =𝑡𝑙𝑠 2 (5.4) 𝐴𝑠= 𝑉𝑠 𝑡1 (5.5) となる。 図5.3 台形速度制御による 6 軸直線補間機能45
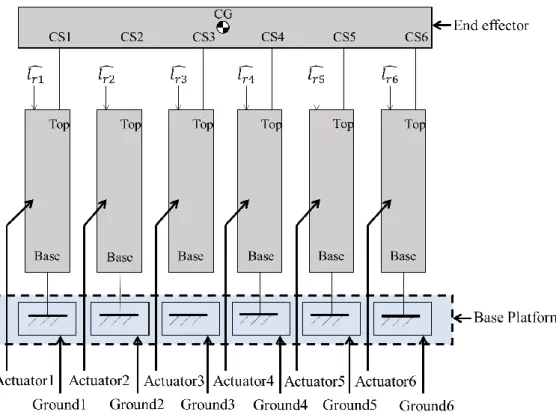
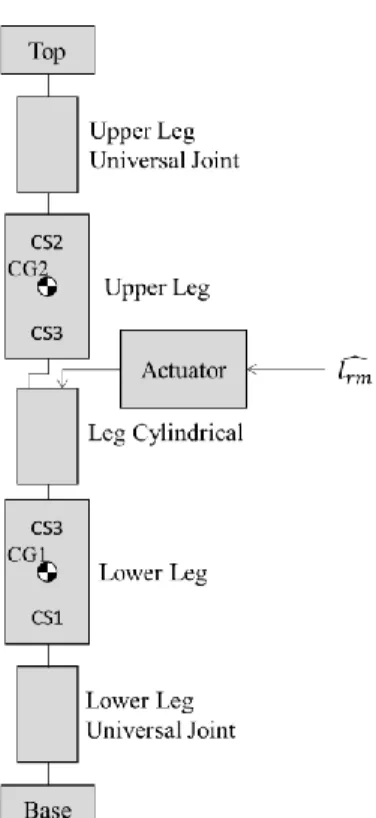
5.2 Matlab を用いたパラレルリンク構造実験装置モデル
第4 章及び 5.1 節で述べた仕様より Matlab を用いてパラレルリンク構造実験装置のモデ ル作成を行う。図5.4 にパラレルリンク構造実験装置のモデルの概要を示す。以下にその説 明を行う。まず 4.2.2 項で述べた逆運動学よりエンドエフェクタの位置・姿勢目標値 𝐶𝑟= [𝑥𝑟 𝑦𝑟 𝑧𝑟 𝛼𝑟 𝛽𝑟 𝛾𝑟]Tから目標値におけるアクチュエータの長さを求め,移動前 のアクチュエータの長さ𝑙 = [𝑙1 𝑙2 𝑙3 𝑙4 𝑙5 𝑙6]Tを引くことで,アクチュエータの移動 量𝑙𝑟= [𝑙𝑟1 𝑙𝑟2 𝑙𝑟3 𝑙𝑟4 𝑙𝑟5 𝑙𝑟6]𝑇を求める。次に 5.1 節で述べた台形速度制御による 6 軸 直 線 補 間 機 能 よ り , 6 本 の ア ク チ ュ エ ー タ の 台 形 速 度 信 号 𝑙̂ = [𝑙𝑟 ̂ 𝑙𝑟1 ̂ 𝑙𝑟2 ̂ 𝑙𝑟3 ̂ 𝑙𝑟4 ̂ 𝑙𝑟5 ̂]𝑟6 𝑇 を作成する。最後に信号を StewartPlatform モデルに入力 することでエンドエフェクタの制御を行う。 以下に StewartPlatform モデルの説明を行う。図 5.5 に StewartPlatform モデル,図 5.6 に𝑚番 目のリニアアクチュエータモデルを示す。図5.5 における CS1~CS6 はそれぞれアクチュエ ータとエンドエフェクタの接続座標であるので𝐸𝑚𝑜の値が入り,Ground1~Ground6 はそれぞ れアクチュエータとベースプラットフォームの接続座標であるので𝐵𝑚の値が入る。CG はエ ンドエフェクタの重心であるので𝐶の値が入る。図 5.6 は図 5.5 におけるアクチュエータの 内部を表している。CS2 はアクチュエータ可動部(Upper Leg)のエンドエフェクタ側の頂点 座標を表し,CS1 はアクチュエータ固定部(Lower Leg)のベースプラットフォーム側頂点座 標を表す。CS3 はアクチュエータ可動部のベースプラットフォーム側頂点と固定部のエン ドエフェクタ側頂点の繋ぎ目の座標である。 エンドエフェクタ,ベースプラットフォーム,アクチュエータ固定部,アクチュエータ 可動部の質量をそれぞれ𝑀e, 𝑀b, 𝑀l1, 𝑀l2,直径をそれぞれ𝐷𝑒, 𝐷𝑏, 𝐷𝑙1, 𝐷𝑙2,高さをそれぞれ ℎe, ℎ𝑏, ℎ𝑙1, ℎ𝑙2とすると各剛体の慣性テルソン𝐼kは, 𝐼𝑘= [ 𝜋𝐷𝑘𝑀𝑘(3𝐷𝑘2+ ℎ𝑘2) 12 0 0 0 𝜋𝐷𝑘𝑀𝑘(3𝐷𝑘 2+ ℎ 𝑘2) 12 0 0 0 𝜋𝐷𝑘 3𝑀 𝑘 2 ] (5.6) となる。ここで添え字 k は各剛体を表す文字である。 図5.7 にアクチュエータの回転,直動軸の概要を示す。𝑚番目のアクチュエータの単位ベ クトルを𝑙𝑣𝑒𝑐𝑚= [𝑙𝑚𝑥 𝑙𝑚𝑦 𝑙𝑚𝑧]𝑇とすると,𝑙𝑣𝑒𝑐𝑚の回転軸は, 𝑋𝑚′ = 𝑙𝑣𝑒𝑐𝑚× 𝑧𝑢𝑛𝑖𝑡 |𝑙𝑣𝑒𝑐𝑚× 𝑧𝑢𝑛𝑖𝑡| (5.7) 𝑌𝑚′ = − 𝑋𝑚′ × 𝑙𝑣𝑒𝑐𝑚 |𝑋𝑚′ × 𝑙𝑣𝑒𝑐𝑚| (5.8)46
となる。ここで,𝑧𝑢𝑛𝑖𝑡は𝑍軸方向の単位ベクトルである。直動軸は次式で表せる。
𝑍𝑚′ = 𝑙𝑣𝑒𝑐𝑚 (5.9)
図5.4 パラレルリンク構造実験装置モデル概要
47
図5.6 𝑚番目のリニアアクチュエータモデル
48
5.3 StewartPlatform 型パラレルリンク構造のエンドエフ
ェクタ分解能問題
パラレルリンク構造システムは構造的特徴から順運動学計算が非常に困難であり,それ によって幾つかの問題が生じる。そのひとつにエンドエフェクタの分解能問題がある。本 節ではこの問題について述べる。 一般的なシリアルリンク構造におけるアクチュエータとエンドエフェクタの運動変換の 比率は1:1 である。しかしパラレルリンク構造におけるアクチュエータとエンドエフェク タの運動変換の比率は1:1 とはならず,アクチュエータの運動を拡大または縮小してエン ドエフェクタに伝達する。アクチュエータの分解能は使用するアクチュエータの性能によ って決定されるが,対象となるエンドエフェクタの分解能はアクチュエータの分解能やエ ンドエフェクタの位置・姿勢によって変化するため,単純に求めることはできない。精密 作業機械の分野において活用するためには,エンドエフェクタの分解能に基づいた設計が 必要とされる。 エンドエフェクタ分解能検証の手法を説明する。エンドエフェクタの可動空間内に測定 座標点を定め,その座標点におけるアクチュエータの長さを初期値として定める。測定座 標点からエンドエフェクタを移動させ,移動後のアクチュエータの長さからストロークを 求める。このときストロークが (a)「すべてのアクチュエータが 1 分解能以上変位した」 もしくは, (b)「すべてのアクチュエータの変位が 1 分解能以上,もしくは変位 0 であった。ただし, すべて0 は除く」 となるときの,エンドエフェクタの最小移動量をエンドエフェクタの最小分解能と定義す る。この(a)または(b)をストローク判別条件とする。 図5.8 にエンドエフェクタ分解能検証フローチャートを示す。以下に𝑥軸方向を例に説明 を行う。まず初期値となる測定座標点𝐶st= [𝑥𝑠𝑡 𝑦𝑠𝑡 𝑧𝑠𝑡 𝛼𝑠𝑡 𝛽𝑠𝑡 𝛾𝑠𝑡]𝑇を定め,逆運動 学計算より測定座標点におけるアクチュエータ長さ𝑙𝑠𝑡= [𝑙𝑠𝑡1 𝑙𝑠𝑡2 𝑙𝑠𝑡3 𝑙𝑠𝑡4 𝑙𝑠𝑡5 𝑙𝑠𝑡6]𝑇 を求める。次にエンドエフェクタを測定分解能∆𝑑分𝑥軸方向に移動させる。移動後の座標点 𝐶𝑒𝑑は𝐶𝑒𝑑 = [𝑥𝑠𝑡+ ∆𝑑 𝑦𝑠𝑡 𝑧𝑠𝑡 𝛼𝑠𝑡 𝛽𝑠𝑡 𝛾𝑠𝑡]𝑇となる。そして,逆運動学計算より移動後 のアクチュエータ長さ𝑙𝑒𝑑= [𝑙𝑒𝑑1 𝑙𝑒𝑑2 𝑙𝑒𝑑3 𝑙𝑒𝑑4 𝑙𝑒𝑑5 𝑙𝑒𝑑6]𝑇を求める。そして移動後の アクチュエータ長さ𝑙𝑒𝑑から測定座標点におけるアクチュエータ長さ𝑙𝑠𝑡を引き,アクチュエ ータのストロークを求める。この時,アクチュエータが負の方向へ変位することもあるの で値に絶対値を設けている。最後にストローク判別式によりストロークが駆動可能であっ た場合,すなわち判別条件を満たした場合,次の測定座標点へ移動し,ストロークが駆動49 不可であった場合,𝑥軸方向の移動量を 1 測定分解能分増やし再度計算を行う。 ス ト ロ ー ク 判 別 式 に つ い て 説 明 す る 。 ア ク チ ュ エ ー タ の ス ト ロ ー ク 𝑠𝑡𝑟𝑜𝑘𝑒 = [𝑠𝑡𝑟𝑜𝑘𝑒1 𝑠𝑡𝑜𝑟𝑜𝑘𝑒2 𝑠𝑡𝑟𝑜𝑘𝑒3 𝑠𝑡𝑟𝑜𝑘𝑒4 𝑠𝑡𝑟𝑜𝑘𝑒5 𝑠𝑡𝑟𝑜𝑘𝑒6]Tは次式で表せる。 𝑠𝑡𝑟𝑜𝑘𝑒 = |𝑙𝑒𝑑− 𝑙𝑠𝑡| (5.10) ここで𝑚番目のアクチュエータのストロークを𝑠𝑡𝑟𝑜𝑘𝑒𝑚とする。 パラレルリンク構造実験装置の全てのアクチュエータの分解能を𝑅𝑎,アクチュエータの 変位が0 であるとみなす閾値を𝜀とすると,ストローク判別条件(a)は 𝑠𝑡𝑟𝑜𝑘𝑒𝑚≥ 𝑅𝑎 (5.11) と表すことができる。ストローク判別条件(b)は 𝑠𝑡𝑟𝑜𝑘𝑒𝑚≥ 𝑅𝑎 | 𝑠𝑡𝑟𝑜𝑘𝑒𝑚≤ 𝜀 (5.12) となる。ただし,すべてのアクチュエータのストロークに対し 𝑠𝑡𝑟𝑜𝑘𝑒𝑚≤ 𝜀 (5.12) が成立する場合を除く。 測 定 座 標 点 𝐶st= [𝑥𝑠𝑡 𝑦𝑠𝑡 𝑧𝑠𝑡 𝛼𝑠𝑡 𝛽𝑠𝑡 𝛾𝑠𝑡]𝑇 は , 初 期 位 置 座 標 点 を 𝐶0= [0𝑚𝑚 0𝑚𝑚 128𝑚𝑚 0° 0° 0°]𝑇としたとき,𝑥𝑦平面において𝑥𝑠𝑡と𝑦𝑠𝑡ともに -5mm から 2.5mm 刻みで+5mm までの 25 点,さらに高さ𝑧𝑠𝑡において+123mm から 2.5mm 刻みで133mm までの 5 点で計 125 点の計測を行った。図 5.9 に測定座標点の概要を示す。 以上の𝑥軸方向に対するエンドエフェクタの分解能検証を𝑦軸,𝑧軸に対しても同様の手法 を用いて検証を行った。表5.1 にエンドエフェクタ分解能測定条件を示す。エンドエフェク タ分解能測定結果を以下の表に示す。表5.2,表 5.3,表 5.4,表 5.5,表 5.6 はそれぞれ測 定座標点の𝑥軸の値が𝑥 = 5𝑚𝑚, 𝑥 = −2.5𝑚𝑚, 𝑥 = 0𝑚𝑚, 𝑥 = 2.5𝑚𝑚, 𝑥 = 0𝑚𝑚の座標におけ る測定結果を示している。測定結果より, ・測定座標点の𝑧軸が増加するほど運動変換の比率は増加する ・𝑥軸方向の運動変換の比率は測定座標点の𝑥の値によって概ね値が決まる ・𝑦軸方向の運動変換の比率は測定座標点の𝑦の値によって概ね値が決まる ・𝑧軸方向の運動変換の比率は概ね 1:1 である という傾向があることを確認できた。 測定座標点𝐶stの𝑥軸の値が-2.5mm のとき,𝑥軸負方向の最小移動量が 600μm 以上となっ ている。この問題に対し,アクチュエータ分解能𝑅𝑎は0.5μm のまま変更せず,閾値𝜀を 10% 相当の0.05μm に変更した条件と,アクチュエータ分解能𝑅𝑎を 0.1μm,閾値𝜀は 1%相当の 0.001μm に変更した 2 つの測定条件で再度検証を行った。表 5.7 に𝑥 = −2.5𝑚𝑚における𝑥軸 負方向移動量検証結果を示す。この結果より,アクチュエータのパラメータを変更するこ とでこの問題を改善できることが確認できた。 本節では StewartPlatform 型パラレルリンク構造実験装置に対するエンドエフェクタの分 解能検証を行った。その結果,エンドエフェクタの分解能検証アルゴリズムとそれを実行 するプログラムを開発した。付録 a に示す。
50
51 図5.9 測定座標点概要 表5.1 エンドエフェクタ分解能測定条件 アクチュエータ分解能 𝑅𝑎 0.5um 閾値 𝜀 0.005um (𝑅𝑎の1%相当) 測定分解能 ∆𝑑 0.01um
52 表5.2 𝑥 = 5𝑚𝑚におけるエンドエフェクタ分解能測定結果 x [mm] y [mm] z [mm] 正方向 負方向 正方向 負方向 正方向 負方向 5 5 123 8.06 -8.07 23.70 -23.49 0.52 -0.52 5 5 125.5 8.21 -8.22 24.18 -23.95 0.52 -0.52 5 5 128 8.37 -8.38 24.65 -24.42 0.52 -0.52 5 5 130.5 8.53 -8.54 25.13 -24.89 0.52 -0.52 5 5 133 8.68 -8.69 25.61 -25.36 0.52 -0.52 5 2.5 123 8.03 -8.03 12.11 -12.08 0.52 -0.52 5 2.5 125.5 8.18 -8.19 12.35 -12.32 0.52 -0.52 5 2.5 128 8.34 -8.35 12.59 -12.56 0.52 -0.52 5 2.5 130.5 8.50 -8.51 12.83 -12.80 0.51 -0.51 5 2.5 133 8.66 -8.67 13.08 -13.04 0.51 -0.51 5 0 123 8.00 -8.01 8.14 -8.14 0.51 -0.51 5 0 125.5 8.16 -8.17 8.30 -8.30 0.51 -0.51 5 0 128 8.31 -8.32 8.47 -8.47 0.51 -0.51 5 0 130.5 8.47 -8.48 8.63 -8.63 0.51 -0.51 5 0 133 8.63 -8.64 8.79 -8.79 0.51 -0.51 5 -2.5 123 8.03 -8.03 12.08 -12.11 0.52 -0.52 5 -2.5 125.5 8.18 -8.19 12.32 -12.35 0.52 -0.52 5 -2.5 128 8.34 -8.35 12.56 -12.59 0.52 -0.52 5 -2.5 130.5 8.50 -8.51 12.80 -12.83 0.51 -0.51 5 -2.5 133 8.66 -8.67 13.04 -13.08 0.51 -0.51 5 -5 123 8.06 -8.07 23.49 -23.70 0.52 -0.52 5 -5 125.5 8.21 -8.22 23.95 -24.18 0.52 -0.52 5 -5 128 8.37 -8.38 24.42 -24.65 0.52 -0.52 5 -5 130.5 8.53 -8.54 24.89 -25.13 0.52 -0.52 5 -5 133 8.68 -8.69 25.36 -25.61 0.52 -0.52 y 軸移動量[μm] z 軸移動量[μm] 測定座標点[x y z ] x 軸移動量[μm]
53 表5.3 𝑥 = 2.5𝑚𝑚におけるエンドエフェクタ分解能測定結果 x [mm] y [mm] z [mm] 正方向 負方向 正方向 負方向 正方向 負方向 2.5 5 123 11.83 -11.86 23.76 -23.54 0.52 -0.52 2.5 5 125.5 12.06 -12.09 24.23 -24.01 0.52 -0.52 2.5 5 128 12.29 -12.32 24.71 -24.48 0.51 -0.51 2.5 5 130.5 12.52 -12.55 25.19 -24.95 0.51 -0.51 2.5 5 133 12.75 -12.78 25.66 -25.41 0.51 -0.51 2.5 2.5 123 11.79 -11.81 12.14 -12.11 0.51 -0.51 2.5 2.5 125.5 12.02 -12.04 12.38 -12.35 0.51 -0.51 2.5 2.5 128 12.25 -12.28 12.62 -12.59 0.51 -0.51 2.5 2.5 130.5 12.48 -12.51 12.86 -12.83 0.51 -0.51 2.5 2.5 133 12.71 -12.74 13.11 -13.07 0.51 -0.51 2.5 0 123 11.75 -11.77 8.16 -8.16 0.51 -0.51 2.5 0 125.5 11.98 -12.01 8.32 -8.32 0.51 -0.51 2.5 0 128 12.21 -12.24 8.49 -8.49 0.51 -0.51 2.5 0 130.5 12.44 -12.47 8.65 -8.65 0.51 -0.51 2.5 0 133 12.67 -12.70 8.81 -8.81 0.51 -0.51 2.5 -2.5 123 11.79 -11.81 12.11 -12.14 0.51 -0.51 2.5 -2.5 125.5 12.02 -12.04 12.35 -12.38 0.51 -0.51 2.5 -2.5 128 12.25 -12.28 12.59 -12.62 0.51 -0.51 2.5 -2.5 130.5 12.48 -12.51 12.83 -12.86 0.51 -0.51 2.5 -2.5 133 12.71 -12.74 13.07 -13.11 0.51 -0.51 2.5 -5 123 11.83 -11.86 23.54 -23.76 0.52 -0.52 2.5 -5 125.5 12.06 -12.09 24.01 -24.23 0.52 -0.52 2.5 -5 128 12.29 -12.32 24.48 -24.71 0.51 -0.51 2.5 -5 130.5 12.52 -12.55 24.95 -25.19 0.51 -0.51 2.5 -5 133 12.75 -12.78 25.41 -25.66 0.51 -0.51 測定座標点[x y z ] x 軸移動量[μm] y 軸移動量[μm] z 軸移動量[μm]
54 表5.4 𝑥 = 0𝑚𝑚におけるエンドエフェクタ分解能測定結果 x [mm] y [mm] z [mm] 正方向 負方向 正方向 負方向 正方向 負方向 0 5 123 22.29 -22.47 23.82 -23.61 0.52 -0.52 0 5 125.5 22.72 -22.91 24.30 -24.08 0.52 -0.52 0 5 128 23.15 -23.35 24.77 -24.54 0.51 -0.51 0 5 130.5 23.59 -23.79 25.25 -25.01 0.51 -0.51 0 5 133 24.02 -24.23 25.73 -25.48 0.51 -0.51 0 2.5 123 22.20 -22.38 12.17 -12.14 0.51 -0.51 0 2.5 125.5 22.64 -22.82 12.41 -12.38 0.51 -0.51 0 2.5 128 23.07 -23.27 12.65 -12.62 0.51 -0.51 0 2.5 130.5 23.51 -23.71 12.90 -12.86 0.51 -0.51 0 2.5 133 23.94 -24.15 13.14 -13.10 0.51 -0.51 0 0 123 22.13 -22.30 8.18 -8.18 0.51 -0.51 0 0 125.5 22.56 -22.75 8.35 -8.35 0.51 -0.51 0 0 128 23.00 -23.19 8.51 -8.51 0.51 -0.51 0 0 130.5 23.44 -23.63 8.67 -8.67 0.51 -0.51 0 0 133 23.87 -24.08 8.83 -8.83 0.51 -0.51 0 -2.5 123 22.20 -22.38 12.14 -12.17 0.51 -0.51 0 -2.5 125.5 22.64 -22.82 12.38 -12.41 0.51 -0.51 0 -2.5 128 23.07 -23.27 12.62 -12.65 0.51 -0.51 0 -2.5 130.5 23.51 -23.71 12.86 -12.90 0.51 -0.51 0 -2.5 133 23.94 -24.15 13.10 -13.14 0.51 -0.51 0 -5 123 22.29 -22.47 23.61 -23.82 0.52 -0.52 0 -5 125.5 22.72 -22.91 24.08 -24.30 0.52 -0.52 0 -5 128 23.15 -23.35 24.54 -24.77 0.51 -0.51 0 -5 130.5 23.59 -23.79 25.01 -25.25 0.51 -0.51 0 -5 133 24.02 -24.23 25.48 -25.73 0.51 -0.51 z 軸移動量[μm] 測定座標点[x y z ] x 軸移動量[μm] y 軸移動量[μm]
55 表5.5 𝑥 = −2.5𝑚𝑚におけるエンドエフェクタ分解能測定結果 x [mm] y [mm] z [mm] 正方向 負方向 正方向 負方向 正方向 負方向 -2.5 5 123 162.03 -610.73 23.90 -23.69 0.52 -0.52 -2.5 5 125.5 164.64 -610.69 24.37 -24.15 0.51 -0.51 -2.5 5 128 167.24 -610.64 24.85 -24.62 0.51 -0.51 -2.5 5 130.5 169.82 -610.60 25.32 -25.08 0.51 -0.51 -2.5 5 133 172.39 -610.56 25.80 -25.55 0.51 -0.51 -2.5 2.5 123 161.53 -610.72 12.21 -12.18 0.51 -0.51 -2.5 2.5 125.5 164.15 -610.68 12.45 -12.42 0.51 -0.51 -2.5 2.5 128 166.76 -610.64 12.69 -12.66 0.51 -0.51 -2.5 2.5 130.5 169.35 -610.60 12.93 -12.90 0.51 -0.51 -2.5 2.5 133 171.93 -610.56 13.17 -13.14 0.51 -0.51 -2.5 0 123 161.07 -610.71 8.21 -8.21 0.51 -0.51 -2.5 0 125.5 163.70 -610.67 8.37 -8.37 0.51 -0.51 -2.5 0 128 166.32 -610.63 8.53 -8.53 0.51 -0.51 -2.5 0 130.5 168.93 -610.59 8.70 -8.70 0.51 -0.51 -2.5 0 133 171.52 -610.55 8.86 -8.86 0.51 -0.51 -2.5 -2.5 123 161.53 -610.72 12.18 -12.21 0.51 -0.51 -2.5 -2.5 125.5 164.15 -610.68 12.42 -12.45 0.51 -0.51 -2.5 -2.5 128 166.76 -610.64 12.66 -12.69 0.51 -0.51 -2.5 -2.5 130.5 169.35 -610.60 12.90 -12.93 0.51 -0.51 -2.5 -2.5 133 171.93 -610.56 13.14 -13.17 0.51 -0.51 -2.5 -5 123 162.03 -610.73 23.69 -23.90 0.52 -0.52 -2.5 -5 125.5 164.64 -610.69 24.15 -24.37 0.51 -0.51 -2.5 -5 128 167.24 -610.64 24.62 -24.85 0.51 -0.51 -2.5 -5 130.5 169.82 -610.60 25.08 -25.32 0.51 -0.51 -2.5 -5 133 172.39 -610.56 25.55 -25.80 0.51 -0.51 測定座標点[x y z ] x 軸移動量[μm] y 軸移動量[μm] z 軸移動量[μm]
56 表5.6 𝑥 = −5𝑚𝑚におけるエンドエフェクタ分解能測定結果 x [mm] y [mm] z [mm] 正方向 負方向 正方向 負方向 正方向 負方向 -5 5 123 28.81 -28.44 23.99 -23.77 0.52 -0.52 -5 5 125.5 29.38 -28.99 24.46 -24.23 0.52 -0.52 -5 5 128 29.95 -29.54 24.93 -24.70 0.52 -0.52 -5 5 130.5 30.51 -30.09 25.41 -25.16 0.52 -0.52 -5 5 133 31.08 -30.65 25.88 -25.63 0.52 -0.52 -5 2.5 123 28.70 -28.33 12.25 -12.22 0.52 -0.52 -5 2.5 125.5 29.27 -28.89 12.49 -12.46 0.52 -0.52 -5 2.5 128 29.84 -29.44 12.73 -12.70 0.52 -0.52 -5 2.5 130.5 30.41 -29.99 12.97 -12.94 0.51 -0.51 -5 2.5 133 30.98 -30.55 13.21 -13.18 0.51 -0.51 -5 0 123 28.60 -28.24 8.24 -8.24 0.52 -0.52 -5 0 125.5 29.17 -28.79 8.40 -8.40 0.51 -0.51 -5 0 128 29.74 -29.35 8.56 -8.56 0.51 -0.51 -5 0 130.5 30.31 -29.90 8.72 -8.72 0.51 -0.51 -5 0 133 30.89 -30.46 8.88 -8.88 0.51 -0.51 -5 -2.5 123 28.70 -28.33 12.22 -12.25 0.52 -0.52 -5 -2.5 125.5 29.27 -28.89 12.46 -12.49 0.52 -0.52 -5 -2.5 128 29.84 -29.44 12.70 -12.73 0.52 -0.52 -5 -2.5 130.5 30.41 -29.99 12.94 -12.97 0.51 -0.51 -5 -2.5 133 30.98 -30.55 13.18 -13.21 0.51 -0.51 -5 -5 123 28.81 -28.44 23.77 -23.99 0.52 -0.52 -5 -5 125.5 29.38 -28.99 24.23 -24.46 0.52 -0.52 -5 -5 128 29.95 -29.54 24.70 -24.93 0.52 -0.52 -5 -5 130.5 30.51 -30.09 25.16 -25.41 0.52 -0.52 -5 -5 133 31.08 -30.65 25.63 -25.88 0.52 -0.52 測定座標点[x y z ] x 軸移動量[μm] y 軸移動量[μm] z 軸移動量[μm]