公共測量のためのマルチ
GNSS 測量マニュアル(案)の制定
Publication of a draft manual on Multi-GNSS Surveying
測地観測センター
山尾裕美・鎌苅裕紀・万所求
1・古屋智秋・辻宏道・後藤清
Geodetic Observation Center
Hiromi YAMAO, Yuki KAMAKARI, Motomu MANDOKORO,
Tomoaki FURUYA, Hiromichi TSUJI and Kiyoshi GOTO
要 旨 国土地理院では,平成23 年度から平成 26 年度ま での国土交通省総合技術開発プロジェクト「高度な 国土管理のための複数の衛星測位システム(マルチ GNSS)による高精度測位技術の開発」の研究成果 や外部有識者による検討を踏まえ,GPS,GLONASS, Galileo 及び準天頂衛星システムといった GNSS の信 号を単独もしくは複数組み合わせて用いる測量によ り,新点である基準点の位置を定める作業方法を示 した「マルチGNSS 測量マニュアル(案) -近代 化GPS,Galileo 等の活用-」を制定した. 本稿では,マルチGNSS 測量マニュアル(案)の 概要等について報告する. 1. はじめに 近年,米国のGPS だけでなく,ロシアの GLONASS, 欧州連合のGalileo,日本の準天頂衛星システム(以 下「QZSS」という.)といった各国の衛星測位シス テム(GNSS)(以下「衛星系」という.)の利用が 可能になり,複数の測位衛星や新たな周波数帯の信 号が利用できる「マルチ GNSS」の環境が整いつつ ある. 測量分野でも,こうしたマルチGNSS の信号を賢 く活用することで,ビル街や山間部等といった上空 視界に制約があり GPS だけでは測量が難しい地域 でも,測量できる場所や時間の拡大が期待されてい る.また,新しい L5 周波数帯の信号(以下「L5」 という.)を利用して3 周波測位を行うことで,従来 と同じ精度をより短い観測時間で達成することも期 待されている. このような期待に応えるべく,国土地理院が国土 交通省総合技術開発プロジェクト「高度な国土管理 のための複数の衛星測位システム(マルチ GNSS) による高精度測位技術の開発(平成 23~26 年度)」 (国土地理院,2014)(以下「総プロ」という.)に おいて行った技術開発や実証実験に基づき,現在配 備中のGNSS や L5 の今後の利用の進展を想定し, GPS,GLONASS,Galileo 及び QZSS といったマル チGNSS の信号を単独若しくは複数組み合わせて用 いる測量(以下「マルチ GNSS 測量」という.)に より,新点である基準点の位置を定める作業方法を 示すために平成27 年 5 月 29 日にマルチ GNSS 測量 マニュアル(案)(国土地理院,2015)(以下「マニ ュアル案」という.)を制定した.さらに,その後日 本の準天頂衛星システムを明示するため,平成 27 年7 月 22 日に一部改正した. 2. マニュアル案の概要 2.1 マニュアル案制定の背景 総プロでは,GLONASS の系統誤差を除去する方 法,近代化GPS 及び QZSS の系統誤差を除去する方 法,異なる衛星系間で発生する受信機の系統誤差を 除去する方法,新しい周波数帯(L5)の信号を利用 する解析手法等の開発を行った.また,学術用の解 析ソフトウェア RTKLIBver2.4.2(Takasu,2013)を ベースに上記の技術を実装するマルチGNSS 解析ソ フトウェア GSILIB を開発した(古屋ほか,2014). 以上の結果を公共測量に適用するため,本マニュア ル案を制定した. 2.2 マニュアル案の目的 本マニュアル案は,公共測量作業規程の準則(国 土交通省,2013)(以下「準則」という.)第17 条(機 器等及び作業方法に関する特例)第3 項に規定され るもので,マルチGNSS 測量の標準的な作業方法を 定め,その規格を統一するとともに,必要な精度を 確保することを目的としている. 2.3 マニュアル案の特徴 本 マ ニ ュ ア ル 案 で は , 準 則 で 使 用 可 能 な GPS,QZSS 及び GLONASS に加えて,Galileo の使用 についても規定している.これにより使用可能衛星 数が増加することによる測位精度の向上や,ビル街 等で可視衛星数が増加することによる測量可能な場 所や時間帯の拡大が期待される. また,L1,L2 の 2 つの周波数帯の信号に加えて, 新たにL5 の使用についても規定している.L5 を使 用することにより,Galileo を用いた測量においても 現所属:1地理空間情報部
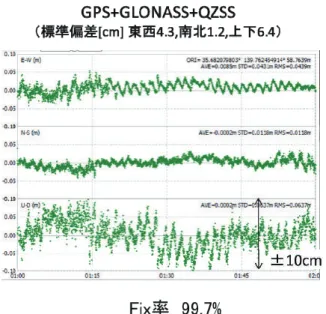
2 周波測位が可能となるほか,L1,L2 及び L5 の 3 周波測位を行うことにより,従来の2 周波測位と同 等の精度をより短い観測時間で達成することが可能 となる. 本マニュアル案に基づく測量において使用可能な 衛星系と周波数帯を以下に示す(図-1). 図-1 本マニュアル案で使用可能な衛星系と周波数帯. (赤枠内が新たに使用可能となった衛星系と周波 数帯.) さらに本マニュアル案では,従来の同じ衛星系間 でのみ位相差をとる解析(以下「混合処理」という.) に加えて,上空視界に制約があるビル街等の観測条 件の厳しい場所での利用を想定した,異なる衛星系 間で位相差をとる解析(以下「統合処理」という.) についても規定している.混合処理で複数の衛星系 を利用する場合,各衛星系の衛星を最低2 機観測す る必要があるため,GPS3 機と Galileo1 機で計 4 機 の衛星を観測できたとしても Galileo を測位に利用 することができず,合計3 機となり,測位ができな い.これに対して統合処理で複数の衛星系を利用す る場合は,合計4 機以上の衛星が観測できればよい ため上述の例でも測位が可能である.そのため,統 合処理を導入することにより,上空視界の制限が厳 しく可視衛星数が極めて限られた環境であっても測 位できる可能性が拡大することが期待される. 2.4 マルチ GNSS の利用により期待される効果 前項で述べたように,GPS,QZSS 及び GLONASS に加えて Galileo を使用することで利用可能な衛星 数が増加するため,上空視界に制約がありGPS だけ では測量が難しい地域でも,測量できる場所や時間 が拡大することが期待される.さらに統合処理を行 うことにより,上空視界の制限が極めて厳しい状況 においても測位が可能となることが期待される.マ ルチ GNSS の利用により期待される効果について, 都市部で行った試験観測による実証結果を以下で紹 介する. 写真-1 は,上空視界に制約のある都市部の約 1.5km 離れた 2 地点において試験観測を行ったとき の,観測地点における上空状況の写真である. 写真-1 都市部における試験観測時の上空状況. 写真-1 から,高層ビルにより上空視界が制限され ている状況が確認できる.また,2 地点において共 通で観測されたGalileo は 1 衛星だけであった. 写真-1 の 2 地点における試験観測データを用いた 検証結果を図-2,図-3 及び図-4 に示す.解析手法は L1 のみを用いたキネマティック法を実施し,信号強 度マスクを用いてマルチパスの影響を受けた信号を 除去するなど,誤差要因を取り除く処理を行ってい る. 図-2 GPS のみによる解析結果.
図-3 マルチ GNSS を用いて混合処理を行った場合の解 析結果. 図-4 マルチ GNSS を用いて GPS-Galileo 間で統合処理 を行った場合の解析結果. 図-2 は GPS のみによる解析結果,図-3 はマルチ GNSS(GPS,GLONASS,QZSS 及び Galileo)を用 いた解析(混合処理)を行った場合の解析結果,図 -4 はマルチ GNSS(GPS,GLONASS,QZSS 及び Galileo)を用いた解析(GPS-Galileo 間に統合処理を 適用)を行った場合の解析結果である.なお,本試 験観測において 2 地点で共通して観測した Galileo は1 機しかなかったため,結果的に図-3 の混合処理 においてGalileo は使用されていない. GPS のみによる解析では全観測時間のうち半分程 度しか測位ができていないが,マルチGNSS を用い た解析(混合処理)を行うことにより,ほぼ全ての 観測時間において測位結果を得られることが確認で きた. さらに統合処理を行うことにより,共通して観測 したGalileo が 1 機しかない場合でも解析に使用する ことができ,位相差をとる組み合わせが増えたため 標準偏差が改善した. 3. マニュアル案に規定する内容の検討 マニュアル案に規定する内容については,マルチ GNSS 測量マニュアル案作成に関する検討委員会を 設置し,GNSS 比較基線場等における試験観測の結 果を踏まえて技術的な検討を行った. 3.1 GNSS 比較基線場等における試験観測の概要 マニュアル案に規定する内容について精度検証等 を 行 うた め, つ くば 市に あ る国 土地 理 院長 距離 GNSS 比較基線場及び短距離 GNSS 比較基線場(図 -5)において,測量機器性能検定要領に基づく検定 に準じた観測・解析を実施し,結果を基線場の成果 と比較して検証した.試験観測は,公共測量に適用 することを想定し,準則第37 条第 2 項第二号イで規 定されている観測方法について実施した.ただし, ネットワーク型RTK 法については検証していない. 観測データの解析は,GSILIB 又は Galileo の混合 処理が可能なRTKLIB 改造版を用いて行った.解析 結果は GNSS 比較基線場の公称成果値と比較して, 表-1 の許容範囲内かどうかを評価した. 図-5 国土地理院長距離 GNSS 比較基線場及び短距 GNSS 比較基線場位置図.
表-1 GNSS 比較基線場における試験観測の許容範囲 区分 許容範囲 基線ベクトル 水平(⊿N・⊿E) 15mm 高さ(⊿U) 30mm 検証は,以下の項目について行った. GPS と Galileo の組み合わせ(混合処理) GPS と Galileo の組み合わせ(統合処理) L5 を用いた 1 周波解析及び 2 周波解析 3 周波解析 GPS と GLONASS の組み合わせ(統合処理) GLONASS の単独利用 3.2 Galileo の利用について Galileo は平成 27 年 7 月現在 3 機が使用可能とな っているが,2016 年に 16 機体制,2017 年には 26 機体制で運用されることが計画されている.今後数 年以内に多数の衛星が利用可能になると期待される ため,公共測量における利用可能性について検討を 行った. 3.2.1 GPS と Galileo の組み合わせ(混合処理) Galileo を利用する場合の標準的な手法として, GPS との混合処理を行った場合の測位精度を検証し た(表-2). 表-2 GPS と Galileo の混合処理を行った場合の検証結果 観測方法 周波数 dN(m) dE(m) dU(m) スタティック 1級2周波 (11.7km) L1+L5 0.006 0.009 0.023 スタティック 1級1周波 (1km) L1 0.006 0.004 0.001 スタティック 2級1周波 (500m) L1 0.001 0.002 0.001 スタティック 3級1周波 (200m) L1 0.002 0.001 0.003 スタティック 4級1周波 (30m) L1 0.001 0.001 0.002 短縮スタティック 3級1周波 (200m) L1 0.002 0.001 0.004 キネマティック 3級1周波 (200m) L1 0.003 0.002 0.002 RTK 3級1周波 (200m) L1 0.003 0.001 0.003 成果から差の絶対値_平均 試験観測は,Galileo が 2 機以上観測できる時間帯 に行い,2 周波の解析(L1+L5)には GPS BLOCK IIF と Galileo を,1 周波の解析(L1)には全ての GPS と Galileo を利用した.全ての観測方法において, GNSS 比較基線場の公称成果値との較差の絶対値の 平均値が許容範囲内であることが確認できたため, GPS と Galileo の混合処理を本マニュアル案に規定 した. 3.2.2 GPS と Galileo の組み合わせ(統合処理) 上空視界に制限があるなど,より観測条件が厳し い場合に採用する手法として,統合処理を行った場 合の測位精度についても検証した(表-3). 表-3 GPS と Galileo の統合処理を行った場合の検証結果 観測方法 周波数 dN(m) dE(m) dU(m) スタティック 1級2周波 (11.7km) L1+L5 0.012 0.015 0.017 スタティック 1級1周波 (1km) L1 0.003 0.003 0.004 スタティック 2級1周波 (500m) L1 0.002 0.001 0.002 スタティック 3級1周波 (200m) L1 0.001 0.001 0.003 スタティック 4級1周波 (30m) L1 0.002 0.001 0.004 短縮スタティック 3級1周波 (200m) L1 0.001 0.001 0.003 キネマティック 3級1周波 (200m) L1 0.002 0.002 0.002 RTK 3級1周波 (200m) L1 0.003 0.002 0.003 成果からの絶対値_平均 試験観測は,Galileo が 1 機以上観測できる時間帯 に行い,2 周波の解析(L1+L5)には GPS BLOCK IIF と Galileo を,1 周波の解析(L1)には全ての GPS と Galileo を利用した.全ての観測方法において, GNSS 比較基線場の公称成果値との較差の絶対値の 平均値が許容範囲内となることが確認できたため, GPS と Galileo の統合処理を本マニュアル案に規定 した. なお,異なる受信機間で統合処理を行う場合,衛 星系間受信機ハードウェアバイアス(Inter System Bias. 以下「ISB」という.)を補正する必要がある. GPS-Galileo 間の ISB は受信機の組み合わせ毎にあ らかじめ推定しておいた値を用いて補正することが 可能であるため,マニュアル案では観測着手前及び 全観測完了後の計 2 回,受信機間の ISB を推定し, 推定結果に大きな差異が無いことを確認した上で, 観測着手前に推定したISB を用いて統合処理を行う こととした.ISB の推定方法は本マニュアル案の解 説で詳細に説明されている. 3.3 L5 の利用について 平成27 年 7 月現在,L5 を発信している衛星は全 部で13 機ある.その内訳は,GPS BLOCK IIF9 機, QZSS1 機,Galileo3 機となっている.現状では,L1 及び L5 を発信する衛星を 4 機以上観測できる時間 は1 日約 15 時間,L1,L2 及び L5 を発信する衛星 を4 機以上観測できる時間は一日約 9 時間である. しかし数年後には L5 を発信する衛星が多数利用 可能になると期待されるため,公共測量におけるL5
の利用可能性について検討を行った. 3.3.1 L5 を用いた 1 周波解析及び 2 周波解析 L5 は信号強度が強いためマルチパス耐性が高く, 観測点周辺環境の影響を受けづらいという利点があ る.またL5 を使用することにより,Galileo を用い た測量においても2 周波解析が可能となる.そこで L5 を用いた 1 周波解析及び 2 周波解析の測位精度に ついて,公共測量での利用を想定した検証を行った (表-4). 表-4 L5 を用いた 1 周波解析及び 2 周波解析の検証結果 観測方法 周波数 dN(m) dE(m) dU(m) スタティック 1級2周波 (11.7km) L1+L5 0.006 0.005 0.020 スタティック 1級1周波 (1km) L5 0.004 0.005 0.006 スタティック 2級1周波 (500m) L5 0.001 0.001 0.005 スタティック 3級1周波 (200m) L5 0.003 0.002 0.005 スタティック 4級1周波 (30m) L5 0.002 0.001 0.002 短縮スタティック 3級1周波 (200m) L5 0.004 0.002 0.008 キネマティック 3級1周波 (200m) L5 0.004 0.001 0.004 RTK 3級1周波 (200m) L5 0.008 0.003 0.001 成果からの絶対値_平均 試験観測はGalileo が 1 機以上観測できる時間帯に
行い,GPS BLOCK IIF,QZSS 及び Galileo を用いて
解析を行った.なお,Galileo は他の衛星系と統合処 理を行っている.表-4 の検証結果より,全ての観測 方法において,GNSS 比較基線場の公称成果値との 較差の絶対値の平均値が許容範囲内であることが確 認できた. 上述のGNSS 比較基線場での試験観測は,各観測 方法における標準的な点間距離を想定して行ってい るが,L5 は,L1 及び L2 に比べて周波数が低いため 電離層の影響を受けやすいという懸念があることか ら,電子基準点データを用いて1 周波測位の上限で ある点間距離約 10km の基線における検証も併せて 行った.結果を以下に示す(表-5). 表-5 電子基準点間(基線長 10km 前後)におけるスタテ ィック1 周波解析結果と,F3 解から計算した基線 ベクトルとの較差の絶対値の平均
基線長 dN(m) dE(m) dU(m) dN(m) dE(m) dU(m)
10.3km 0.005 0.007 0.019 0.004 0.004 0.016 9.3km 0.007 0.005 0.010 0.005 0.004 0.005 9.6km 0.010 0.007 0.014 0.007 0.006 0.009 L5 L1 F3からの絶対値_平均 表-5 は,点間距離が 10km 前後の電子基準点間の 基線における1 周波解析の結果と,日々の座標値(以 下「F3 解」という.)から計算した基線ベクトルの 値の較差の絶対値の平均を求めた結果である.比較 のため,L5 を用いた 1 周波解析の結果に加えて L1 を用いた1 周波解析の結果についても示してある. L5 を用いた 1 周波解析の結果は,L1 を用いた 1 周波解析の結果と比べるとF3 解との較差が大きく, 各日間のバラつきも大きいことが分かった.これは, L5 を発信する衛星の数が少ないことに加えて,L5 が L1 に比べて電離層の影響を受けやすいことに起 因すると考えられる. L5 を用いた 1 周波解析が L1 を用いた 1 周波解析 に比べて電離層の影響を受けやすいと考えられるこ と,L5 を発信している衛星は L1 も発信しているた め同じ衛星を用いてL1 の 1 周波解析が可能であり, L5 の 1 周波解析の必要性が低いことから,L5 を用 いた1 周波解析についてはマニュアル案への規定を 見送った.L1 及び L5 を用いた 2 周波解析について は,表-4 の結果から精度に問題ないことが確認され ており,Galileo を用いる測量において 2 周波解析を 行う必要性もあることから,本マニュアル案に規定 した. 3.3.2 L5 を用いた 3 周波解析 L1,L2 及び L5 を用いた 3 周波解析は L1 及び L2 を用いた 2 周波解析の拡張として規定するため,1 級基準点測量で基線長が 10km 以上の場合に適用さ れる観測方法のみにおいて検証した(表-6). 表-6 基線場(基線長約 11.7km)における従来の 2 周波 解析(L1+L2)と L5 を加えた 3 周波解析(L1+L2+L5) の比較結果 試験観測はGPS BLOCK IIF 及び QZSS が合計 4 機以上観測される時間帯に実施した.また解析には GPS BLOCK IIF 及び QZSS を用いた.いずれの解析 結果も許容範囲内におさまっていること,L1,L2 及びL5 を用いた 3 周波解析は,従来の L1 及び L2 を用いた2 周波解析と同等の精度が得られることを
確認できた. さらに解の収束に要する時間を確認するため,基 線長約10km 前後の基線において解析時間 120 分で 得られた座標値との差の RMS を解析時間毎に整理 した(表-7 及び図-6). 表-7 GNSS 比較基線場(基線長約 11.7km)における L5 を加えた3 周波解析(L1+L2+L5)の解の収束状況. L1+L2+L5 解析時間 dN(m) dE(m) dU(m) 120分 0.000 0.000 0.000 110分 0.001 0.001 0.007 100分 0.002 0.002 0.010 90分 0.002 0.003 0.010 80分 0.005 0.005 0.012 70分 0.006 0.006 0.016 60分 0.013 0.005 0.060 観測時間120分での座標値からの差の絶対値_rms 図-6 GNSS 比較基線場(基線長約 11.7km)における L5 を加えた3 周波解析(L1+L2+L5)の解の収束状況. 表-7 及び図-6 の結果から,L1,L2 及び L5 を用い た3 周波解析により得られる座標値は,解析時間 90 分以上であれば解析時間120 分で得られる座標値と の差が各成分1cm 未満となることが確認できた. L1,L2 及び L5 を用いた 3 周波解析については, L1 及び L2 を用いた 2 周波解析と同等の精度を得ら れることに加え,解の収束に要する時間が短いため 測量の効率化に資すると考えられることから,標準 的な観測時間を 90 分以上として本マニュアル案に 規定した. 3.4 GLONASS の利用について 現行の準則には,GPS と GLONASS の統合処理や, GLONASS 単独での利用については規定されていな いが,現在 GLONASS は 24 機が運用可能となって いるため,それらの公共測量における利用可能性に ついて検討を行った.なお,GLONASS の信号を処 理する場合に問題となるGLONASS 受信機チャンネ ル間バイアス(Inter Frequency Bias.以下「IFB」と いう.)は市販のソフトウェアを用いる場合は自動的 に補正されるが,検証に用いた GSILIB には自動補 正機能がないため,あらかじめ受信機の組み合わせ 毎に推定しておいたIFB を用いて基線解析を行った. 3.4.1 GPS と GLONASS の組み合わせ(統合処理) GPS-GLONASS 間で統合処理を行った場合の検証 結果を以下に示す(表-8).なお,異機種受信機間で 統合処理を行う場合は ISB の補正が必要になるが, GPS-GLONASS 間においては,ISB は受信機再起動 により変動するなど受信機の組み合わせ毎のISB の 値が一定ではなく,変動の要因も不明である.この ため本試験観測においてはISB が受信機再起動によ り変動しないことが確認されている受信機のみを用 いて観測したデータの統合処理を行った. 表-8 GPS と GLONASS 間の統合処理を行った場合の検 証結果 観測方法 周波数 dN(m) dE(m) dU(m) スタティック 1級2周波 (11.7km) L1+L2 0.008 0.003 0.023 スタティック 1級1周波 (1km) L1 0.002 0.003 0.005 スタティック 2級1周波 (500m) L1 0.002 0.001 0.003 スタティック 3級1周波 (200m) L1 0.002 0.001 0.003 スタティック 4級1周波 (30m) L1 0.002 0.001 0.003 短縮スタティック 3級1周波 (200m) L1 0.002 0.001 0.004 キネマティック 3級1周波 (200m) L1 0.002 0.001 0.005 RTK 3級1周波 (200m) L1 0.002 0.001 0.005 成果からの絶対値_平均 解析は GPS と GLONASS を用いて行った.表-8 の検証結果より,全ての観測方法において,GNSS 比較基線場の公称成果値との較差の絶対値の平均値 が許容範囲内であることが確認できた.しかし ISB が受信機再起動により変動する要因が不明確である ことから,本マニュアル案でGPS-GLONASS 間の統 合処理について規定することは見送った. 3.4.2 GLONASS の単独利用について GLONASS を単独で使用した場合について,公共 測量での利用を想定し,各観測方法における標準的 な点間距離で検証を行った結果を以下に示す(表-9).
表-9 GLONASS を単独で利用した場合の検証結果 観測方法 周波数 dN(m) dE(m) dU(m) スタティック 1級2周波 (11.7km) L1+L2 0.009 0.005 0.016 スタティック 1級1周波 (1km) L1 0.002 0.004 0.004 スタティック 2級1周波 (500m) L1 0.000 0.001 0.010 スタティック 3級1周波 (200m) L1 0.001 0.000 0.007 スタティック 4級1周波 (30m) L1 0.002 0.001 0.005 短縮スタティック 3級1周波 (200m) L1 0.002 0.001 0.006 キネマティック 3級1周波 (200m) L1 0.003 0.001 0.010 RTK 3級1周波 (200m) L1 0.005 0.002 0.014 成果からの絶対値_平均 解析はGLONASS のみを用いて行った.表-9 の検 証結果より,全ての観測方法において,GNSS 比較 基線場の公称成果値との較差の絶対値の平均値が許 容範囲内であることが確認できた. さらに表-9 の検証に加えて,電子基準点データを 用いて1 周波測位の上限である点間距離約 10km の 基線における検証も併せて行った(表-10). 表-10 電子基準点間(基線長 10km 前後)における GLONASS を用いたスタティック 1 周波解析結果 と,F3 解から計算した基線ベクトルとの較差の絶 対値の平均
基線長 dN(m) dE(m) dU(m) dN(m) dE(m) dU(m)
10.3km 0.001 0.002 0.006 0.001 0.002 0.009 9.3km 0.004 0.003 0.004 0.004 0.004 0.002 9.6km 0.010 0.008 0.007 0.007 0.007 0.009 F3からの絶対値_平均 GLONASS L1 GPS L1 表-10 は,点間距離が 10km 前後の電子基準点間の 基線におけるGLONASS を用いた 1 周波解析の結果 と,F3 解から計算した基線ベクトルの値の較差の絶 対 値 の平 均を 求 めた 結果 で ある .比 較 のた め, GLONASS を用いた 1 周波解析の結果に加えて GPS を用いた1 周波解析の結果についても示してある. 結果は全て許容範囲内であり,GLONASS を用いた 1 周波解析と GPS を用いた 1 周波解析の精度に差が ないことが確認できた. 表-9 及び表-10 の結果から,GLONASS の単独利用 について精度に問題ないことが確認されたため,本 マニュアル案に規定した. 4. まとめ 国土地理院では,平成23 年度から平成 26 年度ま での国土交通省総合技術開発プロジェクト「高度な 国土管理のための複数の衛星測位システム(マルチ GNSS)による高精度測位技術の開発」の研究成果 や外部有識者による検討を踏まえ,GPS,GLONASS, Galileo 及び QZSS といった GNSS の信号を単独もし くは複数組み合わせて用いる測量により,新点であ る基準点の位置を定める作業方法を示したマルチ GNSS 測量マニュアル(案)を制定し,平成 27 年 5 月29 日に施行・公開した.なお,その後日本の準天 頂衛星システムを明示するため,平成27 年 7 月 22 日に一部改正した.本マニュアル案では,Galileo の 使用,L5 の使用に加えて異なる衛星系間で位相差を とる統合処理についても新たに規定している.本マ ニュアル案を活用することにより,ビル街等で使用 可能な可視衛星数が増加することによる測量可能な 場所や時間の拡大,新しい周波数帯の信号を利用す ることによる測量作業の効率化が実現すると期待さ れる.また,本マニュアル案に基づくマルチ GNSS 測量の円滑な実施に資するため,本マニュアル案を 使用する場合の手続きやマルチGNSS 測量の技術的 な解説に加え,本マニュアル案の条文に準則の条文 を補完した「解説」も国土地理院ホームページで公 開している. 今後は本マニュアル案に基づく実証作業を重ね, 精度の検証やマニュアル案の普及に努めていく. 謝辞 本マニュアル案の作成にあたっては,次の有識者 から貴重な助言をいただいた(五十音順,平成 27 年3 月 31 日現在):五百竹義勝氏(電子基準点を利 用したリアルタイム測位推進協議会利用促進WG 座 長),枝克夫氏(全国測量設計業協会連合会技術委員 会特別委員),木寺幸司氏(日本測量協会測量技術セ ンター測地基準情報部部長代理),久保信明准教授 (東京海洋大学海洋工学部),小松崎弘道氏(日本測 量調査技術協会位置情報・応用計測部会副部会長), 佐田達典教授(日本大学理工学部交通システム工学 科),橋本靖彦氏(日本測量機器工業会GPS 測量機 器部門会委員),森下淳氏(国土交通省大臣官房技術 調査課課長補佐).ここに記して感謝する. (公開日:平成27 年 9 月 1 日) 参 考 文 献 古屋智秋,酒井和紀,万所求,辻宏道,畑中雄樹,宗包浩志,川元智司(2014):GSILIB の開発,国土地理
院時報,125,125-131.
国土地理院(2014):高度な国土管理のための複数の衛星測位システム(マルチ GNSS)による高精度測位技 術の開発,http://www.gsi.go.jp/eiseisokuchi/gnss_main.html (accessed 21 Jul. 2015).
国土地理院(2015):マルチGNSS 測量マニュアル(案) -近代化 GPS,Galileo 等の活用- 及び同解説. 国土交通省(2013):作業規程の準則(平成 20 年国土交通省告示第 413 号[最終改正平成 25 年 3 月 29 日国土
交通省告示第286 号]).
Takasu, T. (2013): RTKLIB: An Open Source Program Package for GNSS positioning, http://www.rtklib.com/rtklib.htm (accessed 21 Jul. 2015).