九州大学学術情報リポジトリ
Kyushu University Institutional Repository
二重反転プロペラ装備船の実船馬力推定精度向上に 関する研究
犬飼, 泰彦
https://doi.org/10.15017/1866310
二重反転プロペラ 装備船の実船馬力推定 精度向上に関する研究
平 成 2 9 年 6 月
目次
第 1 章 緒 論
··· 1
1.1 研究の背景 ··· 1
1.2 二重反転プロペラに関する従来の研究 ··· 4
二重反転プロペラの歴史 ··· 4
1.2.1 単独性能の推定法 ··· 6
1.2.2 二重反転プロペラと船体および舵との干渉 ··· 7
1.2.3 実船馬力推定法 ··· 8
1.2.4 1.3 本研究の目的 ··· 10
1.4 本研究の構成 ··· 12
第 2 章 二 重 反 転 プ ロ ペ ラ の 単 独 性 能 推 定 法
··· 14
2.1 緒言 ··· 14
2.2 計算法 ··· 16
SQCMの概要 ··· 16
2.2.1 基礎式 ··· 17
2.2.2 後流渦のモデル化 ··· 27
2.2.3 計算に用いる仮定 ··· 29
2.2.4 2.3 舵非装備時の計算例 ··· 30
計算対象 ··· 30
2.3.1 計算結果 ··· 31 2.3.2
第 3 章 二 重 反 転 プ ロ ペ ラ 装 備 船 の 自 航 試 験 解 析 法
··· 54
3.1 緒言 ··· 54
3.2 実船馬力推定における自航試験解析の位置づけ ··· 55
3.3 従来の自航試験解析法 ··· 59
二重反転プロペラ単独性能を用いる解析法 ··· 60
3.3.1 二重反転プロペラ作動状態における前後プロペラ単独性能を用いる解析法 ··· 61
3.3.2 前後プロペラの単独性能を用いる解析法 ··· 63
3.3.3 3.4 新しい自航試験解析法 ··· 67
従来法の問題点 ··· 67
3.4.1 等価作動状態 ··· 68
3.4.2 後プロペラの等価前進速度と等価回転数の算出方法 ··· 70
3.4.3 新しい解析法の手順 ··· 73
3.4.4 3.5 単純モデルを用いた自航解析例 ··· 79
プロペラ要目 ··· 81
3.5.1 後プロペラ流入速度V2が前プロペラ流入速度V1の 9 割の場合 ··· 81
3.5.2 後プロペラ流入速度V2が前プロペラ流入速度V1の 8 割の場合 ··· 86
3.5.3 3.6 自航試験の自航解析例 ··· 88
供試模型 ··· 88
3.6.1 解析結果 ··· 89
3.6.2 3.7 結言 ··· 92
第 4 章 二 重 反 転 プ ロ ペ ラ 装 備 船 の 有 効 伴 流
··· 93
4.1 緒言 ··· 93
4.2 完全流体中の回転体周りの流れ ··· 95
計算対象 ··· 95 4.2.1
計算結果 ··· 105
4.3.4 4.4 船体周りの流れ ··· 113
CFD計算手法 ··· 113
4.4.1 計算対象 ··· 113
4.4.2 計算結果 ··· 115
4.4.3 4.5 結言 ··· 120
第 5 章 実 船 馬 力 計 算 法
··· 121
5.1 緒言 ··· 121
5.2 実船馬力推定法 ··· 122
伴流修正法 ··· 122
5.2.1 従来の実船馬力推定法の流れ ··· 127
5.2.2 新しい実船馬力推定法 ··· 132
5.2.3 5.3 実船馬力推定例 ··· 136
供試船および供試プロペラの要目 ··· 136
5.3.1 供試船および供試プロペラの模型試験結果 ··· 137
5.3.2 舵伴流率 ··· 139
5.3.3 各推定法の推定馬力比較 ··· 139
5.3.4 5.4 試運転結果との馬力曲線の比較 ··· 149
建造船の要目 ··· 149
5.4.1 Ship Aの試運転結果 ··· 151
5.4.2 Ship Bの試運転結果 ··· 153
5.4.3 他推定法による推定馬力との比較 ··· 155
5.4.4 5.5 試運転結果との前プロペラ馬力分担比の比較 ··· 156
前プロペラ馬力分担比の推定法 ··· 156
5.5.1 建造船の要目 ··· 157 5.5.2
謝 辞
··· 167
参 考 文 献··· 168
表 図 題 一 覧··· 172
記 号 一 覧
C :粘性伴流尺度修正係数 CD : 粘性抗力係数
CF :平板摩擦抵抗係数 CL : 揚力係数
CT :プロペラ荷重度 CW : 造波抵抗係数
Ct :全抵抗係数 C : 循環修正係数
) (r
c :プロペラのスパン方向分割断面rにおける翼弦長 )
(z
c :舵のスパン方向分割断面zにおける翼弦長 dw :前後プロペラに流入する舵伴流率の差
D :プロペラ直径 EHP :有効馬力 FD : 摩擦修正量 H : 形状係数
hs : 流線座標系s方向の尺度 hn : 流線座標系n方向の尺度
J :プロペラ前進係数 K : プロペラ翼数
K1 : 前プロペラ翼数、または流線座標系n方向の測地的曲率 K2 : 後プロペラ翼数、または流線座標系s方向の測地的曲率 KQ : トルク係数
KT : 推力係数 KTR : 舵推力係数 k : 形状影響係数
NB :プロペラキャンバー面のコード方向分割数
NR : 舵面のコード方向分割数 n :プロペラ毎秒回転数
n2E : 後プロペラ等価毎秒回転数
nI2 :後プロペラの見掛けの回転数増加量 xr
o : プロペラ固定の円筒座標系 xyz
o :プロペラ固定座標系 sn
o : 物体表面の流線座標系 PB :所要馬力
PD : 馬力
p :境界層外端の圧力 pB : プロペラ表面の圧力 p0 :基準となる静圧 pR : 舵表面の圧力 Q :プロペラトルク
QD : プロペラトルクの粘性成分
QP :プロペラトルクのポテンシャル成分 R : プロペラ半径、または船体抵抗
Re :レイノルズ数
r : プロペラ半径位置、または回転軸からの距離 r :プロペラ翼における番目の分割位置半径 SB : プロペラ翼表面
SR :舵表面
T : プロペラ推力
TD :プロペラ推力の粘性成分
TP : プロペラ推力のポテンシャル成分
TR :舵推力
T : 舵推力の粘性成分
ue :回転体の有効伴流の軸方向速度 ui : 軸方向のプロペラ前方誘起速度
uSA :プロペラ自身による誘起速度の軸流成分 uST : プロペラ自身による誘起速度の回転流成分 uIA :他プロペラからの誘起速度の軸流成分 uIT : 他プロペラからの誘起速度の回転流成分 VA :プロペラ前進速度
VEA : 等価プロペラ前進速度 VR :舵流入速度
Vr : 半径方向流速成分 VX :軸方向流速成分
V : 周方向流速成分 V :合速度ベクトル
VA : プロペラ前進速度ベクトル VI :流入速度ベクトル
Vfar : 前プロペラから 2 回転後方に離れた後流渦位置における速度 ベクトル
V : 吹出しによる誘起速度ベクトル V :渦による誘起速度ベクトル
S
V : 後流渦節点でのプロペラ周りの流れを表す特異点分布による 誘起速度ベクトル
v : 流線座標系n方向の速度
ve :回転体の有効伴流の半径方向の速度 vi : 半径方向のプロペラ前方誘起速度
v :キャンバー面上の に位置する単位強さの馬蹄渦による 誘起速度ベクトル
11
V :前プロペラの吹出しが前プロペラに誘起する速度ベクトル V : 後プロペラの吹出しが前プロペラに誘起する速度ベクトル
23
V :後プロペラの吹出しが舵に誘起する速度ベクトル
33
V : 舵の吹出しが舵に誘起する速度ベクトル
11
V :前プロペラの馬蹄渦が前プロペラに誘起する速度ベクトル
21
V : 後プロペラの馬蹄渦が前プロペラに誘起する速度ベクトル
31
V :舵の馬蹄渦が前プロペラに誘起する速度ベクトル
12
V : 前プロペラの馬蹄渦が後プロペラに誘起する速度ベクトル
22
V :後プロペラの馬蹄渦が後プロペラに誘起する速度ベクトル
32
V : 舵の馬蹄渦が後プロペラに誘起する速度ベクトル
13
V :前プロペラの馬蹄渦が舵に誘起する速度ベクトル
23
V : 後プロペラの馬蹄渦が舵に誘起する速度ベクトル
33
V :舵の馬蹄渦が舵に誘起する速度ベクトル w : 有効伴流率、または流線座標系方向の 速度 wO1 :後プロペラから前プロペラへの平均誘起速度係数 wO2 : 前プロペラから後プロペラへの平均誘起速度係数 wH :有効伴流率中の船体ポテンシャル伴流成分
wI : 有効伴流率中の前後プロペラ干渉成分 wp :有効伴流率中のポテンシャル成分 wR : 有効伴流率中の舵伴流成分
wex :有効伴流率から前後プロペラ干渉成分を除いた成分 w : 有効伴流率中の粘性成分
1-t :推力減少係数 1-w : 有効伴流係数
:前後プロペラの荷重分担比
: キャンバー面上の に位置する馬蹄渦の単位強さ
:舵翼厚比、または境界層厚さ
1、2 : 排除厚さ
:プロペラ回転角度(基準位置からの角度)
、 : 運動量厚さ
) (
L z :舵高さ方向断面の前縁 )
(
L r : プロペラ半径方向断面の前縁 )
(
T z :舵高さ方向断面の後縁 )
(
T r : プロペラ半径方向断面の後縁
R :船後プロペラ効率比
x
Re : 他プロペラからの干渉影響を除いた船後プロペラ効率比
1
RO :後プロペラから前プロペラへの船後プロペラ効率比の干渉 係数
2
RO :前プロペラから後プロペラへの船後プロペラ効率比の干渉 係数
:流体密度
: 吹出し強さ
s :流線座標系s方向の摩擦応力
n : 流線座標系n方向の摩擦応力
:吹出しによる撹乱速度ポテンシャル
: プロペラ回転角速度
:流線上に沿った渦度 添字
1 : 前プロペラ 2 :後プロペラ
C : 二重反転プロペラ試験時の前後プロペラおのおのの特性、
プロペラ推力およびトルク
E : 後プロペラ等価回転数で無次元化した後プロペラの特性 および前進速度
m : 模型船
O :プロペラ単独試験時の特性、プロペラ推力およびトルク P : 自航試験時の特性、プロペラ推力およびトルク
s :実船
第 1章 緒論
研究の背景
1.1
燃費の改善、温室効果ガス排出量の削減はいずれも船の推進性能に携わる者 にとって古くからの課題である。燃費改善は使用燃料削減を意味し、燃料使用 量削減は温室効果ガス排出量の削減に直結することから両者は同一の課題であ るといってよい。この課題は船の推進効率、輸送効率の改善により解決される ものであり、昔から継続的にその改善努力が続けられている。そして実際に大 幅に改善されてはいるものの、地球環境はそれを上回る速度で変容している。
国連気候変動に関する政府間パネル(IPCC)第 5 次評価報告書によれば、この 100 年間気温は右肩上がりに上昇しており、大気中の二酸化炭素、メタン、一 酸化二窒素は過去 80万年間で前例がないほど増加している[1]。気温上昇の原 因とされる温室効果ガスの排出に関して 2015 年にパリ協定が締結され、21 世 紀後半に産業革命前からの気温上昇を2 度未満に抑えることを目標として排出 削減策を講じることが宣言された[2]。高い目標ではあるが、地球温暖化が世界 中の人々の生活に深刻な影響を与えるという報告は枚挙にいとまがなく、温室 効果ガス削減はすぐに取り組まなければならない最優先課題として世界共通の 認識となっている。
造船・海運業界でも輸送貨物量・輸送距離に対するCO2排出量を定めるエネ ルギー効率設計指標(EEDI)を強制化する海洋汚染防止条約(MARPOL 73/78)附 属書Ⅵの改正案が採択され 2013 年に発効された。2013 年以降に建造契約が結 ばれた EEDI 対象船については、船種ごとに定められた基準値を満たさなけれ ばならず、試運転でその基準値を満たさないことが確認された場合には運航が 認められなくなってしまう。この基準値は 2015年から 2025年までに 5年ごと
ペラ(Contra Rotating Propellers, CRP)を取り扱う。二重反転プロペラは 1838年 にスウェーデン技師 Ericsson が特許を取得して以来、長年に渡って多くの研究 者が取り組んできた省エネ技術である。通常、船の推進装置として一基のプロ ペラが船尾に装備されるが、プロペラの回転に伴い推進に寄与しない回転流が プロペラ後方に放出されるため、推進効率が低下してしまうという問題がある。
Fig. 1.1 に示すように二重反転プロペラでは同軸上に反転する二基のプロペラ
を配置することで、前プロペラ後方に生じる回転流を後プロペラが推力に変換 して高い推進効率を得ることができる。多くの研究によりその省エネ効果は明 らかになっており、実船でも試運転で約 15%という高い燃費改善効果が報告さ れている[3][4][5][6]。
Fig. 1.1 Picture of contra rotating propellers installed for bulk carrier
このように通常のシングルプロペラに対する性能優位性は実証されているも のの、同軸に反転機構を持たせなければならない軸系装置の複雑さや製造コス トの高さなどの理由により二重反転プロペラの採用数は多くはない。現在、総
そうした状況ではあるが、日本では 2005年に国土交通省が独立行政法人鉄道 建設・運輸施設整備支援機構(JRTT)と連携してスーパーエコシップの建造促進 政策を開始し、二重反転プロペラ採用にあたり発生する建造コストの増加分を 負担する施策が講じられた[8]。この施策は2002年に国土交通省が「次世代内 航海運ビジョン~21 世紀型内航海運を目指して~」を定め、その中で効率的で 安全かつ環境にやさしい輸送サービスの構築を目標にした方針が定められたこ とに端を発する。JRTTには、内航海運事業者とJRTTが共同オーナーとなって 船を建造し、共有期間中は JRTT の持ち分額に対して事業者が船舶使用料を納 付し、共有期間満了時に事業者が残存簿価で買い取るという船舶共有建造制度 がある。その中で、国土交通省の定める省エネ政策に適合する船に対し、2005 年から2009年にかけては船価上昇分の2/3相当額を共有期間を通じて船舶使用 料から控除し、さらに省エネ設備に対して設備費用の1/3相当額を国立研究開 発法人新エネルギー・産業技術総合開発機構が補助する仕組みが適用された。
したがって船価上昇分の事業者負担は実質ゼロで省エネ設備を採用できること になった。2009 年以降は JRTT による船舶使用料の控除は金利優遇処置に代 わっているが、この制度の活用により、商船では 2000年以前には4隻しか存在 しなかった二重反転プロペラ装備船が、現在は一桁多い 30隻以上にまで増加し ている。こうして実績が増えることで、これまで二重反転プロペラの実船採用 を阻んでいた二重反転機構の信頼性への不安や、製造コストの高さといった課 題が解決されて、一気に二重反転プロペラ装備船の実績数が増えることが期待 される。
著者は幸運にも 20隻以上の実船設計に携わる機会に恵まれた。そこで得られ た豊富な模型試験および実船試運転結果を基に、二重反転プロペラ装備船の実 船馬力推定精度の向上を図り、今後増加するであろう二重反転プロペラ装備船 の普及の技術基盤を固めることを本研究の目的とする。
二重反転プロペラに関する従来の研究
1.2
二重反転プロペラの歴史
1.2.1
二重反転プロペラの歴史はスウェーデン技師のEricssonが1836年に特許を取 得した頃にさかのぼる。この特許は二重反転プロペラの省エネ性能に着目した ものではなく、シングルプロペラのトルクアンバランスによる針路不安定性を 解消することが目的であった。その後、二重反転プロペラの省エネ性能の優位 性を示す研究例が Rota[9]や Luke[10]により発表されたが、基本的には針路安 定性に対する優位性という観点から魚雷に採用されることが多かったようであ る[11]。
1950年代にシングルプロペラに関する理論設計法が発達してくると、それに あわせて二重反転プロペラに関する理論設計法が研究されるようになる。1955
年に Lerbs[12]により二重反転プロペラの理論設計法が発表され、1960 年には
Morgan ら[13]がその具体的な手順を示した設計法を発表している。この設計法
はその後の二重反転プロペラ設計の礎となり、現在でも頻繁に参照される重要 なものになっているが、この頃から二重反転プロペラに対する理論的な研究が 本格化してくる。
1970年代にオイルショックが起きると、各種省エネ技術に関する研究が盛ん に行われるようになり、省エネ効果の高い技術の一つとして二重反転プロペラ への注目も俄然大きくなる。また、船が高馬力化してくるにつれ、シングルプ ロペラでは馬力を吸収しきれなくなるのではないかという予測の下、その代替 案として二重反転プロペラや多軸プロペラへの注目が高まっていった。実用化 を念頭に 1980年代には設計法、単独性能推定法、馬力計算法など多岐にわたる 研究がなされるようになり、ついに 1988年に自動車運搬船“とよふじ 5”[3]、
1989年に 37,000DWTバラ積み船“JUNO”[4]、と相次いで一般商船への二重
反転プロペラ搭載が実現することとなった。さらに 1993 年には 2 隻の VLCC
(IHI建造“沖ノ嶋丸”[5]および三菱重工業建造 “コスモデルフィナス”[6])
た。
しかし、2004年にその欠点を解決する手段として電気式ポッド推進器と従来 のディーゼル推進器を組み合わせたハイブリッド型二重反転プロペラポッド推 進システムを持つ高速フェリー“はまなす”[14]が三菱重工業により開発され た。すでに技術が確立されたポッド推進とディーゼル推進の組み合わせにより 二重反転プロペラ効果を生み出せるため、実用化への導入障壁が低くなり二重 反転プロペラへの関心が再び高まる画期的な発明となった。一方、同軸二重反 転プロペラ推進システムも就航から何年も経ち、問題なく航行しているという 実績が着実に蓄積されつつあった。
そうした中、二重反転プロペラ採用にあたりもう一つの課題となっていたコ ストに関して、前述のように日本国内では国土交通省によるスーパーエコシッ プの建造促進政策により船主が採用を決断しやすい環境が整った。その結果、
二重反転プロペラ装備船の隻数は年々確実に増加し、Fig. 1.2に示すように現在 30 隻以上の商船が実際に就航することとなっている。
0 5 10 15 20 25 30 35 40 45
1836 1867 1895 1926 1956 1987 2017
Cumulative number of merchant vessel with CRP
Year
このように長い年月をかけ二重反転プロペラが一般商船に装備されるように なったわけであるが、それを支えてきた二重反転プロペラの研究成果の一例を ここで述べることにする。二重反転プロペラの研究は理論設計、単独性能、キャ ビテーション性能、操縦性、ベアリングフォースなど多岐にわたるが、特に本 研究で述べる単独性能、船体とプロペラの干渉、実船馬力推定法に絞って概説 する。
単独性能の推定法
1.2.2
まず、単独性能の推定法については1980年代以降に多くの研究成果が発表さ れている。Nakamura[15]はシングルプロペラを対象に開発された揚力面計算法 の一種であるQCM(Quasi-Continuous vortex lattice Method)を二重反転プロペラ に適用して定常計算を行い、実験値と単独性能が良く一致することを示してい る。同様に QCM を用いた手法により佐々木ら[16]は定常計算だけでなく非定 常計算を行った例を示している。Nakamuraや佐々木らは後流渦の変形やボスの 影響などを考えていなかったが、Yang ら[17][18]はそれらの影響を考慮し、
VLM(Vortex Lattice Method)を用いて定常計算および非定常計算を行った。ボス が推力とトルクの積分値に及ぼす影響は小さいが、プロペラ翼根の循環分布に 与える影響は大きいことを指摘している。
QCMやVLMなどの揚力面理論ではプロペラ面形状を厚みのないキャンバー 面として表すが、Ghassemi[19]や Liu[20]はプロペラ幾何形状をより正確に表 すためにパネル法を用いた解法を示している。両者とも前後プロペラ合計の推 力やトルクに関しては実験値と良く一致した解を得ている。しかし、Liu は前 後プロペラおのおのの荷重分担について実験と比較した場合は実験値と乖離が あることを示し、推定精度改善のためには適切に後流渦をモデル化する必要で あると結論付けている。
また近年ではポテンシャル法だけでなく CFD(Computational Fluid Dynamics) を 用 い た 二 重 反 転 プ ロ ペ ラ 特 性 の 考 察 へ の 取 り 組 み も 報 告 さ れ て い る 。
影響を良く捉えられることを示している。Paikら[22]は RANS方程式を用いた CFD 解 析 に よ り 船 尾 の 二 重 反 転 プ ロ ペ ラ 後 流 を 推 定 し SPIV(Stereoscopic
Particle Image Velocimetry)を用いた計測結果と比べている。CFDでは計測流場
と良く一致した結果を得ているが、船尾では通常のシングルプロペラに比べ二 重反転プロペラは複雑な流場となるため、後流渦形状を仮定する必要があるポ テンシャル法では、そのモデル化に十分な注意が必要であることを指摘してい る。
二重反転プロペラと船体および舵との干渉
1.2.3
次に二重反転プロペラと船体および舵との干渉については理論よりも実験の 報告が多い。例えば Manenら[23]はタンカーと高速貨物船を対象としてシング ルプロペラと二重反転プロペラの自航試験を実施し、プロペラ単独性能では二 重反転プロペラの効率改善量は 2%程度であるが、自航時の推進性能の改善に よりタンカーでは満載状態で 4.5%、バラスト状態で 8.0%、コンテナ船では 6.5%の馬力削減が期待できるという結果を得ている。小久保ら[24]もタンカー や高速コンテナ船を対象として Morgan の方法を改良した設計法により二重反 転プロペラを設計し、そのプロペラを用いて単独性能試験および自航試験を実 施している。どちらの船種でも二重反転プロペラの方がシングルプロペラに比 べて推力減少率tおよび有効伴流率wが大きくなるという結果が示されている。
フルード則に従って自航試験を実施するため、二重反転プロペラでは自航時の 回転数が低くなり、粘性影響を受けやすい傾向にあることから、プロペラ前縁 に粗さをつけた影響や小容量動力計と大容量動力計を用いた場合の検討をして いる。粗さを付けた場合、単独性能に及ぼすレイノルズ数影響が軽減され、船 後プロペラ効率比や有効伴流率も粗さなしの場合と若干差が見られることを示 している。また動力計の違いにより自航要素に違いが見られ、低回転の自航試 験では試験計測精度にも十分注意が必要であることが示されている。
佐々木ら[16]が行った研究は船体および舵との干渉を理論的に検討した数少
る傾向にあることに触れている。この中で、推力減少率 tの増加については二 重反転プロペラでは後流中の回転成分がなくなるためシングルプロペラに比べ て舵抵抗が大きくなることに起因することを理論的に示している。有効伴流率 wが大きくなる原因については、船体に働く Lagally Forceがシングルプロペラ と二重反転プロペラで大差ないことから船体との干渉ではなく舵による影響で はないか、と示唆している。
一方、Inukai ら[28]は舵非装備時にもシングルプロペラに比べて二重反転プ
ロペラの有効伴流率 wが大きくなることから、シングルプロペラと二重反転プ ロペラの前方の流場の違いに着目し、前方の吸い込み範囲が二重反転プロペラ ではシングルプロペラよりも狭くなるためではないかと考察している。また運 動量理論から求まる流管径内の公称伴流積分値と有効伴流率にまとまりが見ら れることを示している。
実船馬力推定法
1.2.4
最後に、実船馬力推定法については 21stITTC[29]の調査にあるように、従来 シングルプロペラで広く採用されている推定法[30]を二重反転プロペラの実船 馬力推定に用いることが多い。すなわち二重反転プロペラを一つの推進器とみ なしてシングルプロペラと同様に解析を進める推定法である。
これに対し佐々木[25]は前後プロペラおのおのの特性を用いて自航試験の解 析を行い、実船馬力を推定する推定法を提案している。この推定法では前後プ ロペラ個々に流入する有効伴流について独立して尺度影響を考えることができ、
二重反転プロペラを一つの推進器とみなす場合には得られない前後プロペラそ れぞれの作動状態を得ることができる。また先に述べたように舵との干渉計算 法を利用して前後プロペラに流入する舵伴流の違いを求め、その違いに起因し て生じる単独性能試験と自航試験の前後プロペラ間の干渉の違いを考慮してい るところがこの推定法の独自的な点である。
佐々木は二重反転プロペラとして作動している時の前後プロペラの単独性能
で得られる有効伴流率 wから干渉成分を分離するようにしている。佐々木の推 定法に対して、前後プロペラ間の干渉をより明確に考慮して、それぞれの作動 状態を把握しようとする狙いである。
Ohら[32]は二重反転プロペラ一体の特性を利用する場合、佐々木のように二 重反転プロペラとして作動している時の前後プロペラの特性を利用する場合、
石田のように前後プロペラ単独の特性を利用する場合の 3ケースについて実船 馬力の推定差を比較している。ただし、佐々木や石田らと違って前後プロペラ 間の干渉については考慮していない。推定法間の違いにより実船の推定馬力に
最大2%の差が生じる結果を報告している。
本研究の目的
1.3
先に述べたように、本研究の目的は今後増加するであろう二重反転プロペラ の需要に対応すべく、その実船馬力推定精度の改善を図ることにある。
船の馬力(Delivered power)を推定するには、Fig. 1.3に示すように①船体の抵 抗(Resistance)、 ② プ ロ ペ ラ の 性 能 を 示 す 単 独 効 率(Propeller open water efficiency)、 ③ 船 体 と プ ロ ペ ラ の 干 渉 影 響 を 示 す 自 航 要 素(Self propulsion factors)を知る必要があり、このうち二重反転プロペラとシングルプロペラで異 なるのは②と③である。
Fig. 1.3 Composition of delivered power
プロペラ単独性能は二重反転プロペラ装備船の性能を決定づけるものであり、
設計段階において高精度で推定できる計算法が必要となる。二重反転プロペラ では前後プロペラが互いに干渉するためにシングルプロペラに比べて高度な計 算が要求される。Liu[20]が指摘しているように単独性能の推定精度向上には後 流渦の精緻なモデル化が不可欠である。前述のように過去に多くの研究者が単 独性能計算法の研究を行っているものの、後流渦の変形に経験式を用いていた り、プロペラ後縁近傍における変形までは取り扱っていない点で依然推定精度 改善の余地があると考えられる。そこで本研究ではまず二重反転プロペラの単 独性能推定精度の向上を図る。
次に自航要素については、確立された自航試験解析法が存在しないのが現状 である。二重反転プロペラを一つの推進器とみなすか、二つのプロペラの組合
Propeller open water efficiency
Hull efficiency (Self propulsion factors) Delivered
power
Ship speed Resistance
効伴流率 w がシングルプロペラに比べて大きくなる事例が多く報告されてい る。有効伴流率 wの増加による船殻効率改善がプロペラ単独効率の改善量に匹 敵するような場合もあるにも関わらず、それに対して考察を十分に行っている 研究はこれまでにほとんど見られない。有効伴流率 wは自航要素の中で尺度影 響を受けるパラメータであり、その性質について考察することは実船馬力を推 定する上でも重要である。そこで、本研究では二重反転プロペラ装備時にシン グルプロペラに比べて有効伴流率 wが大きくなる理由について考察し、その原 因を明らかにする。
最後に、実船馬力の推定法について検討し、その推定精度の向上を図る。
以上、二重反転プロペラ装備船の実船馬力推定精度向上のために以下につい て検討を行う。
(1) 精度良い単独性能計算法の開発 (2) 自航試験解析法の確立
(3) 有効伴流利得の原因解明 (4) 実船馬力推定法の確立
本研究の構成
1.4
第1章は緒論であり、二重反転プロペラ研究の歴史と本研究の目的を述べる とともに、本研究の必要性ならびに関連する研究について概説し、本研究の構 成を示す。
第2章ではまず、二重反転プロペラの単独性能計算法について述べる。九州 大学で開発されたパネル法である SQCM(Source and Quasi-Continuous vortex lattice Method )[33]をベースとして後流渦を適切に表現することができる単独 性能推定法を開発し、従来よりも精度良い性能推定が可能であることを示す。
さらに、舵が前後プロペラの特性に及ぼす影響は推進性能上無視できないため、
舵とプロペラを組み合わせた状態の単独性能計算法についても取り扱い、模型 試験との比較から推定精度の検証を行う。
第3章では、二重反転プロペラと船体および舵の干渉影響(自航要素)を模 型試験の中でどのように解析して求めるか、という船の推進性能を考える上で 最も基本的な事項についての標準的な解析法が存在しないという現状を踏まえ、
これまでに提案された解析法を整理し、より正確に自航要素を表すことができ る新しい自航試験解析法を提案する。さらに、単純化したプロペラ作動状態の 解析を第 2章で開発した計算法を用いて行い、他手法に比べ本手法は自航要素 を適切に解析できることを示す。
第4章ではまず、自航要素のうち、船速に対するプロペラ流入速度の減少量 の比を表す有効伴流率が二重反転プロペラ装備船ではシングルプロペラ装備船 に比べ大きくなることが多いことを述べる。有効伴流率は尺度影響を大きく受 けるパラメータであり、実船馬力推定法を考える上で、その性質について考察 することは重要であるため、プロペラ前方に配置した物体周りの流れと二重反 転プロペラの干渉について、ポテンシャル法、境界層理論、CFDにより検討し、
有効伴流率が大きくなる原因について考察を行う。
第5章ではまず、第 3章で示した新しい自航試験解析法に基づく実船馬力推
後プロペラの回転数比を変更した実船試運転結果との比較から第 2章で示した 単独性能推定法により精度良く推定可能であることを確認する。
第6章では、本研究の成果を結論として示し、今後取り組むべき課題につい て述べる。
第 2章 二重反転プロペラの単独性能推定法
2.1
緒言プロペラの単独性能は二重反転プロペラ(Contra Rotating Propellers, CRP)装 備船の性能を決定づけるものであり、二重反転プロペラ適用船種の範囲を拡大 していくためには高い精度の性能推定法の開発が必須となる。
最近は RANS 方程式を用いた CFD 解析で推定する方法も発表されている [21]。この方法は従来のポテンシャル法に比べ粘性影響をより詳細に考慮する ことができることや後流渦形状をあらかじめ仮定する必要がないことから、高 精度な推定法として期待されている。しかし計算時間が多大になるため、現段 階ではシングルプロペラ設計でも広く用いられているポテンシャル法を応用す る手法が実際の設計ツールとしては現実的である。ポテンシャル法で単独性能 を推定する場合、どのような後流渦モデルを採用するかが一般に推定精度に大 きな影響を及ぼす。二重反転プロペラでは後プロペラが前プロペラの後流渦の 中で作動するということもあり、適切な後流渦のモデル化はシングルプロペラ 以上に重要な課題となる。前章に述べた通り、これまでに発表されている推定 法では後流渦の変形を考慮していない[15][16][19]、もしくは経験式を用いて いたり簡略化していたりする場合がほとんどであり[17][18][20]、推定精度の 改善にはまだ検討の余地が残っている状況である。
また二重反転プロペラ設計をする際に考えなければならない問題の一つにプ ロペラ性能に及ぼす舵の影響がある。舵との距離が前後二基のプロペラで異な るため、おのおの距離に応じて異なる舵伴流が流入し、前後プロペラの作動状 況は舵がない場合とは違ったものになる。したがって、舵の影響の正確な取り 扱いも二重反転プロペラのプロペラ特性を推定する上で重要な課題となる。
こ れ ら の 課 題を 解 決す る た め に 、 九 州 大学 で 開 発 さ れた パ ネル 法 で あ る
モデル化の手法と計算の仮定について述べる。次に舵非装備時の計算結果を実 験結果と比較し、後流渦の変形を考慮しない場合に比べ単独性能の推定精度が 大幅に改善されることを示す。さらに舵装備時の計算結果と実験結果を比較し、
舵の影響による前後プロペラの特性変化を精度良く捉えられることを示す。
2.2
計算法SQCM
の概要2.2.1
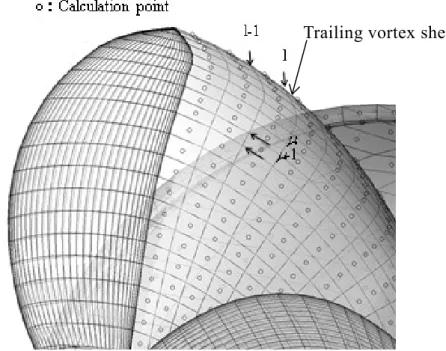
SQCMは、翼表面の上下面を同数に分割し、Hess and Smith法[34]による吹 出しパネルを配置させ、さらに Lan の QCM[35]に従って、キャンバー面上に 束縛渦を配置する。吹出しおよび渦分布は、翼表面上のパネル中心点および QCM の理論により定められるキャンバー面上のコントロールポイントにおい て、キャンバー面と翼表面上での垂直速度がゼロという条件から求められる。
Fig. 2.1は3次元翼のある断面を取り出して翼表面の吹出しパネルとキャンバー
上の渦、そしてコントロールポイントの位置関係を示したものである。ここに 示すように、キャンバー面上の渦の数を翼表面の上下面のパネル数よりも 1個 だけ多く選ぶことにより、翼表面上のコントロールポイントの直上および直下 に渦が配置されることがなくなり、特異性が回避され安定して計算を行うこと ができる。QCMの理論に従うと翼断面の最後端にキャンバー面上のコントロー ルポイントが配置され、この点上の垂直速度をゼロと置くことにより翼後端を 回り込む流れがなくなり、繰り返し計算を行わずに Kutta の条件を満足するこ とができる。このため、他のパネル法に比べて計算時間が短くて済むにも関わ らず、精度良い結果を得られることを特徴とする。
本研究ではこの理論をプロペラと舵にそれぞれ適用した計算法を開発する。
2.2.2
基礎式(1) プロペラおよび舵を表す座標系
前プロペラ、後プロペラの翼数がそれぞれ K1,K2であるプロペラが、非粘 性、非圧縮性の無限流体の一様流中で角速度1、2で回転し、プロペラ後流 中に舵がある場合を考える。ここで添字1、2はそれぞれ前プロペラと後プロペ ラを表す。x 軸をプロペラ回転軸に一致させ、x 軸上の前プロペラの Generator Line位置に原点をとる。そして、z軸を鉛直上向きに、y軸を直交座標系 o-xyz が右手座標系になるように選ぶ。この時の座標系を Fig. 2.2に示す。一様流は x 軸の正方向を向き、その速度を VAとする。前プロペラはプロペラ後方から見 て時計回りに、後プロペラは反時計回りの方向に回転している。さらに便宜上 プロペラ固定の円筒座標系 o-xrを導入する。この時、直交座標系o-xyzと円 筒座標系 o-xrの関係は、前プロペラと後プロペラでそれぞれ次式により表さ れる。
x
x 、 y rcos、z rsin for forward propeller (2.1) dx
x
x 、y rcos 、z rsin for aft propeller (2.2) ただし,
2
2 z
y r
y/z
tan
1
for forward propeller
y/z
tan1
for aft propeller dx :前後プロペラ間距離
はプロペラの回転方向と逆の向きを正とする。
Fig. 2.2 Coordinate systems of CRP and rudder
(2) プロペラと舵周りの流れを表す速度ベクトル
プロペラ翼表面 SB、舵表面 SRをそれぞれスパン方向に MB個,MR個、翼 断面の Face面とBack 面をそれぞれコード方向にNB個、NR 個,合計MB×2
NB 個、MR×2NR個のパネルに分割し、それぞれのパネル内で一定強さの吹 出し を分布させる。この時のパネル分割は翼の前縁、後縁およびハブ、チッ
x z
VA
Ω1 Ω2
y r
θ
o
V (2.3)
ただし、
z dS z y
y x
x
z y x
SB
( ')2 ( ')2 ( ')2
) ' , ' , '
(
for propellers
z dS z y
y x
x
z y x
SR
( ')2 ( ')2 ( ')2
) ' , ' , '
(
for rudder
次にキャンバー面を吹出しパネルの半径方向の分割位置に合わせ MB、MR 分割、コード方向をNB 、NR 分割し、MB×NB 個、MR×NR 個の馬蹄渦 を配置する。スパン方向の分割位置番号を(プロペラでは翼根→翼端、舵では 上端→下端)、コード方向の分割位置番号を(前縁→後縁)とし、キャンバー面 および後流渦に沿って軸を設定すると、プロペラの各半径位置(r断面)、舵 の各スパン方向位置(z断面)における束縛渦のコード方向位置 は QCM の 配置法に従って次式で表される。
B L
T
L N
r r r
2 1 1 2
2 ( ) cos
) ) (
(
=1,…,MB, =1,…,NB for propellers
R L
T
L N
z z z
2 1 1 2
2 ( ) cos
) ) (
(
=1,…,MR, =1,…,NB for rudder
(2.4)
ここで、L
r 、L
z およびT
r 、T
z はそれぞれスパン方向分割断面r、 zの前縁(L.E.)および後縁(T.E.)の位置を表している。渦分布による速度ベクトルVは次式により表される。
K
k
MB NB
v r
N c V
1 1 1
2
( ) sin
for propellers
K MR N
B
(2.5)
rc 、c
z : スパン方向分割断面rの翼弦長v は 1 本の束縛渦と自由渦および後流渦を構成する渦線分による単位渦強 さあたりの誘起速度ベクトルであり、個々の渦線分による誘起速度ベクトルは
Biot-Savart の法則により計算できる。Fig. 2.3 に示すような渦線分が図中の P
点に誘起する速度ベクトルv
は次式のように表される。
12 1 1 2 2 2 1
2 1
4
1 r
r r r r r r
r
v r
(2.6)
ここで、渦線分と計算点 Pが近づきすぎるような場合には過大な誘起速度が 計算されてしまうため、渦線分と計算点 Pの距離に最小値 r0を設け、これより 渦糸に近接した流れを回転流れとして扱う Rankine 渦モデル[36]を適用する。
本計算では前プロペラおよび後プロペラの r0は、プロペラ半径を R1、R2とし て、0.1R1および 0.1R2とした。また舵内部にあるプロペラ後流渦糸からの誘起 速度はゼロとしている。
r d r
r r
2 1
2
1 if d rO then d rO (2.7)
全体の速度ベクトルVi は次式により表される。
11 21 31 11 21 31 1 1
1
V V V V V V V r
V A
for forward propeller
12 22 32 12 22 32 2 2
2
V V V V V V V r
V A
for aft propeller
13 23 33 13 23 33
3 V V V V V V V
V A
for rudder
(2.8)
11
V : 前プロペラの吹出しが前プロペラに誘起する速度ベクトル
21
V : 後プロペラの吹出しが前プロペラに誘起する速度ベクトル
31
V : 舵の吹出しが前プロペラに誘起する速度ベクトル
12
V : 前プロペラの吹出しが後プロペラに誘起する速度ベクトル
22
V : 後プロペラの吹出しが後プロペラに誘起する速度ベクトル
32
V : 舵の吹出しが後プロペラに誘起する速度ベクトル
13
V : 前プロペラの吹出しが舵に誘起する速度ベクトル
23
V : 後プロペラの吹出しが舵に誘起する速度ベクトル
33
V : 舵の吹出しが舵に誘起する速度ベクトル
11
V : 前プロペラの馬蹄渦が前プロペラに誘起する速度ベクトル
21
V : 後プロペラの馬蹄渦が前プロペラに誘起する速度ベクトル
31
V : 舵の馬蹄渦が前プロペラに誘起する速度ベクトル
12
V : 前プロペラの馬蹄渦が後プロペラに誘起する速度ベクトル
22
V : 後プロペラの馬蹄渦が後プロペラに誘起する速度ベクトル
32
V : 舵の馬蹄渦が後プロペラに誘起する速度ベクトル
13
V : 前プロペラの馬蹄渦が舵に誘起する速度ベクトル
23
V : 後プロペラの馬蹄渦が舵に誘起する速度ベクトル V : 舵の馬蹄渦が舵に誘起する速度ベクトル
イントの半径方向位置riおよび舵のキャンバー面上のコントロールポイントの スパン方向位置 ziは束縛渦の両端を置いた断面の中央とし、ri断面でのコード 長c
ri および zi 断面でのコード長c
zi は束縛渦を置いた両断面の平均値とす る。さらに、ri、zi断面におけるコントロールポイントのコード方向の位置ijは、QCMの理論に基づいて以下の式で与えられる。
B i
L i T i L
ij N
j r
r (r ) ( ) cos )
( 1
2
i=1,…,MB, j=1,…,NB for propellers
R i
L i i T
L
ij N
j z
z (z ) ( ) cos )
( 1
2
i=1,…,MR, j=1,…,NR for rudder
(2.9)
プロペラ翼表面またはキャンバー面上の法線ベクトルをnとして、境界条件 は以下の式で与えられる。
1 0
1 n
V for forward propeller
2 0
2 n
V for aft propeller
3 0
3 n
V for rudder
(2.10)
この境界条件を同時に満たすように吹出し と渦分布 を求める。定常問題と して解くために、コントロールポイントにおける他方のプロペラまたは舵から の誘起速度を周方向平均して用いた。ただし、プロペラの翼表面およびキャン バー面における誘起速度の軸方向変化は大きくないので、計算時間短縮のため コード方向の誘起速度については翼弦中央における値で代表させている。
(4) プロペラ翼と舵表面の圧力分布および推力、トルク
吹出し と渦分布 が求まるとプロペラ翼表面圧力 pB は無限遠方での静圧 p0と流体の密度を用い、Bernoulliの定理より次式から求まる。
0 2 2
2 1
I A
B p V V
p (2.11)