アクティブ動吸振器の振動子モデルを用いた制御手法に関する研究
○嘉村泰光 田川泰敬(東京農工大学)
Control of active mass damper by utilizing an oscillator model
* Y. Kamura, and Y. Tagawa (Tokyo University of Agriculture and Technology)
Abstract- This paper presents a novel controller for active mass dampers (for short, AMD). The
controller is composed of a conventional compensator, an oscillator model, and a mixer. The mixer sums up the two signals from the conventional compensator and the oscillator to generate the command for AMD. The proposed controller allows AMD to keep working within its limited length. In this paper, the simulation of a structure with AMD under seismic excitation was carried out to verify the effectiveness of the proposed controller. The results showed that AMD reduced the amplitude of the swaying structure by 40 % in RMS with the proposed controller, as it was kept working within a stroke-limitation in almost all the time.
Key Words: Seismic excitation, Active structural control, AMD, self-excitation, Vibration Control
1 緒言
近年,増加している高層建物は,建物の固有周期 の長周期化の為,長周期地震動によって大きく揺れ る可能性がある.建物の揺れを抑制するために,既 に制振装置としてアクティブ動吸振器(Active Mass Damper 以下,AMD)を設置している場合がある 1). AMD とは一定方向に動くマスと,このマスを動か すアクチュエータから構成される制振装置の一種で ある.マスを動かすときの反力を建物に加えること で,建物の揺れを抑制する. しかし,風による建物の揺れの抑制や中・小規模 地震時の制振を目的とした小型の AMD の場合は, 長周期地震動による大きな揺れを十分に抑制するこ とは困難である.可動マスの質量は,大型のもので は建物の質量の 3%を超える場合もあるが,小型の ものでは 0.5%程度1)である.建物の揺れが大きい場 合,可動マスが軽い AMD では,可動マスを移動さ せる距離が長くなり,装置の範囲内に収まらなくな るからである.この場合,従来は AMD を停止させ ていたが,地震時・地震後の制振効果を十分に得る ことができないという課題があった 2).また,可動 マスの大型化は,建物の耐荷重や設置スペースの関 係で制限される場合がある1). そこで,小型 AMD で地震時・地震後の制振効果 を得るために,装置に収まる距離で可動マスを動か し続ける必要がある. 常に装置の許す範囲に可動マスの移動距離を収め る方法のひとつとして,制御器のゲインを揺れの大 きさに合わせて切替えることが提案されてきた 3). 地震を再現したシミュレーションや実験で,この手 法を用いて常に AMD を動かせることが報告されて いる.しかし,ゲインを切替えるときに AMD への 指令値が不連続となるため,一時的に必要以上に強 い力が AMD から建物に加わるという課題が報告さ れている4). そこで本研究では,建物に衝撃的な力を与えるこ となく,常に装置の許す範囲に可動マスの移動距離 を収めることで,小型 AMD で地震時・地震後の制 振効果を得ることを目的とする.強い揺れに対応す る制御器と弱い揺れに対応する制御器を設け,2 種 類の制御器の AMD 指令値を,揺れの大きさによっ て比率を変化させながら足し合わせる手法を提案す る. 2 種類の制御器について特徴を説明した後, AMD 指令値を足し合わせる手法について説明する. 最後に提案手法を用いて行ったシミュレーションに ついて概要と結果を述べ,提案手法の有効性を示す.2 提案手法
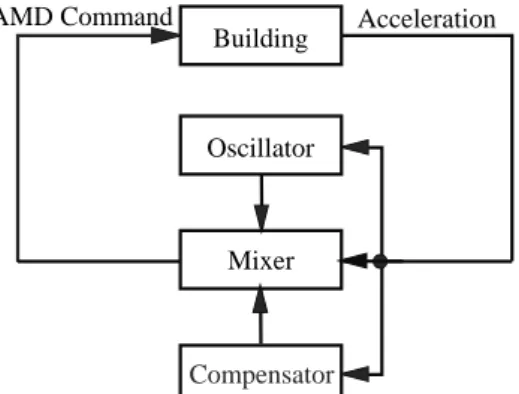
提案手法を含めた制御システムの全体図を Fig.1.1 に示す.建物の揺れは加速度センサによって取得さ れ,振動子を用いた制御器(Oscillator)と従来型の 制御器(Compensator)と 2 種類の制御器の出力を足 し合わせる部分(Mixer)に入力される.AMD 指令 値は,予め設定した可動マスの移動距離の限界内に 収まるように,足し合わせる際に調整される.以下 で,2 種類の制御器と,2 種類の制御器の出力を足し 合わせる部分それぞれについて説明する. 2.1 振動子型の制御器 本研究では,強い揺れに対応する制御器として, 振動子をモデル化したものを利用した.振動子とは, 外部からのエネルギー供給を受けて自励振動を生じ るシステムである.振動子には,入力信号の振幅が 変化しても,出力の振幅が変化しにくい性質がある. したがって,この性質を利用すれば建物の揺れの振 幅の変化が AMD の指令値に現れにくい制御器が実 現できると考えられる.本研究では振動子として, 栗田らの提案した可変速度フィードバック型自励振Fig. 2.1 Outline of whole system
Oscillator
Compensator
Mixer Building
AMD Command Acceleration
第60 回自動制御連合講演会(2017 年 11 月 10 日~ 12 日・東京) 17PR0002/0000-1591 © 2017 SICE
動子5)を制御器として利用した.van der pole 振動子 や神経振動子6)と比べ,振動波形が正弦曲線に近く, AMD の指令値に適していると考えたからである. 2.2 従来型の制御器 一方で,弱い揺れに対応する制御器は,AMD の 過剰な稼動による加振の危険を避ける為,従来使用 されてきた揺れの大きさと制御力の大きさが比例す る制御器を利用した.本研究では従来型の制御器と して,制御対象の極の減衰率を任意に設定でき、1 次のローパス特性を備える伝達関数形式の制御器を 用いた.制御器の設計は田川らが提唱したモデルマ ッチング法7)によって行なった. 2.3 2 種類の制御器の出力を足し合わせ方法 2 種類の制御器の欠点を補い,利点を活かす為, 振動子型の制御器によって得られた出力と,従来型 の 制 御 器 に よ って 得 ら れた 出 力 を 足 し 合わ せ て AMD の指令値とした.振動子型の制御器の利点は, 揺れが強い場合にも,可動マスを装置の許す範囲内 で常に動かし続けることを可能にする点である.一 方で欠点としては,揺れが弱い場合にも可動マスを 揺れが強い場合と同じ距離だけ動かすので,建物に 必要以上の制御力を与え,加振するという点である. 従来型の制御器の利点は,振動子型の制御器と異 なり,揺れの大きさに応じて制御力が変化するとい う点である.揺れに比例した制御力を発揮するよう な AMD 指令値を出力する為,弱い揺れの場合に AMD による加振を避けられる.一方で欠点として は,揺れが強い場合には,より強く制振する為に, 可動マスを動かす距離が装置の大きさを越える危険 があるという点である. この 2 種類の制御器の出力を足し合わせて AMD の指令値とすることで,揺れの強さに応じて両者の 利点を活かすことが可能となる. また,従来型の制御器のゲインだけを単純に切替 えて可動マスの移動距離を抑制する場合と異なり, AMD 指令値の不連続な変化によって AMD が衝撃 的な力を建物に与える危険性が低下すると考えられ るからである. このような制御方法を用いれば,風揺れ制振用や 中小地震用の小型 AMD を,弱い揺れの場合に限ら ず,強い揺れの場合でも可動域内で稼動させること ができると考えられる. 以下で,可変速度フィードバック型自励振動子の 概要,従来型の伝達関数形式の制御器の設計方法, そして 2 種類の制御器の出力を足し合わせる方法に ついて詳しく述べる.
3 可変速度フィードバック型自励振動子
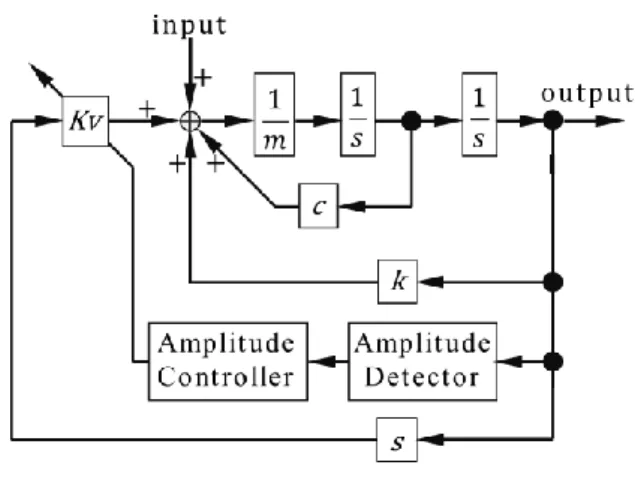
本研究では振動子として,栗田らの提案した可変 速度フィードバック型自励振動子を制御器として利 用した.可変速度フィードバック型自励振動子のブ ロック線図を Fig.3.1 に示す.可変速度フィードバッ ク型自励振動子はバネ・マス・ダンパ系に速度フィ ードバックの閉ループを組合せた形をしている.こ の振動子の運動方程式を以下に示す. m𝑥̈ + (𝑐 − 𝐾𝑣)𝑥̇ + 𝑘𝑥 = 0 (3.1) 減衰に関わる速度項の係数が可変という特徴がある. 速度項の係数の状態により,振動子の挙動は 3 つに 大別される. 𝑐 − 𝐾𝑣< 0 𝑐 − 𝐾𝑣= 0 (3.2) 𝑐 − 𝐾𝑣> 0 速度フィードバックゲイン Kvの値が c よりも大き い場合は,振動は拡大していく.一方で,Kvよりも c が大きい場合,振動は減衰していく.Kvと c が等 しい場合,振動は拡大も減衰もせずに持続する.こ のように,速度フィードバックゲイン Kvが変化する ことによって,振動子の自励振動の振幅が制御され る.速度フィードバックゲイン Kvは与えられた目標 振幅で常に振動子が振動するように,振幅コントロ ーラによって調整される.振幅コントローラは目標 振幅と現在の振幅の差を求める部分とその差を小さ くするように速度フィードバックゲイン Kv を決定 する PID 制御器からなる.現在の振幅は振幅検出器 によって逐次求められる. 3.1 振幅検出器 振幅検出器は,可能な限り位相遅れを伴わずに振 動の包絡線を求めるため,入力信号の 2 乗とノッチ フィルタを組合せる方法を用いた.固有角振動数, 振幅 A の信号を 2 乗すると,次のように計算できる. (A sin 𝜔𝑡)2=𝐴(1 − cos 2𝜔) 2 = 𝐴 2− 𝐴 2cos 2𝜔 (3.3)Fig. 3.1 Block diagram of variable feedback velocity oscillator
2 乗することで,入力信号の半分の振幅の直流成 分と,2 倍の固有角振動数を持つ交流成分に分ける ことができる.振動の包絡線は直流成分に当たるの で,振幅検出器は直流成分のみを抽出すればよい. Fig.3.2 に振幅検出器のブロック線図を示す. ノッチフィルタは次の式で表されるものである. 𝑁 =𝑠 2+ 2ζ 𝑛ω𝑠 + 4𝜔2 𝑠2+ 2ζ 𝑑ω𝑠 + 4𝜔2 (3.4) ここで,は建物の揺れの固有角振動数である.n, dはn > dの関係を満たす任意の定数である.入力 信号を 2 乗し,入力信号の 2 倍の周波数の成分をノ ッチフィルタで取り除くことで,直流成分のみを抽 出する. ただし,この直流成分の振幅は入力信号の半分に なっている上,2 乗したことで歪みを含んでいる. したがって,得られた直流成分を 2 倍して,1/2 乗す ることで,入力信号の包絡線を得ることができる.
4 従来型の制御器の概要
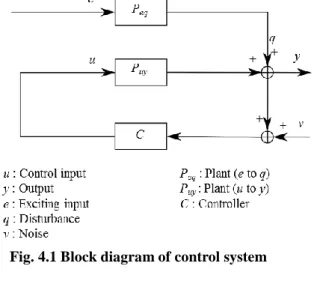
Fig.4.1 に,本研究で扱うシステムのブロック線図 を示す.従来型の制御器はモデルマッチング法によ って設計する.モデルマッチング法は,ノイズ抑制 特性と外乱抑制特性を任意に設定し,設定した特性 を実現するフィードバック制御器を設計する制御器 設計方法である.モデルマッチング法には,あらか じめ必要なフィルタの周波数特性を考慮して設計す ることが可能なので,所望の制御性能を得やすいと いう利点がある為,この方法で制御器を設計した. 外乱 q から出力 y までの閉ループ伝達関数を Wqy,ノ イズ v から出力 y までの閉ループ伝達関数を Wvyと 定義する. Wqy,Wvyの伝達関数の特性多項式は, どちらもシステム全体の特性多項式で表される.シ ステム全体の特性多項式を Dsとおく.今,特性多項 式 Dsの次数を n とすると,特性多項式 Dsは次のよ うに表される. 𝐷𝑠= (𝑠 − 𝑝1)(𝑠 − 𝑝2) ⋯ (𝑠 − 𝑝𝑛) (4.1) ここで,piはシステムに含まれる極である.また, Fig.4.1 のブロック線図より,Wqyと Wvyは C と Puy を用いてそれぞれ以下のように表される. 𝑊𝑞𝑦=1 − 𝐶𝑃1 𝑢𝑦 (4.2) 𝑊𝑣𝑦= 𝐶𝑃𝑢𝑦 1 − 𝐶𝑃𝑢𝑦 (4.3) 更に,Wqy,Wvuの特性多項式に Dsを用いて整理する. Wqyの分子は Puyの全ての極を含んでいる.また, Wvyの特性多項式は Puyの全ての零点を含んでいる. そこで,Puyを次のように分子と特性多項式に分解す る. 𝑃𝑢𝑦 = 𝑁𝑝 𝐷𝑝 (4.4) Wqyの分子をDpと,それ以外の零点に分けて次のよ うに変形する. 𝑊𝑞𝑦= 𝐷𝑝𝑁̂𝑞𝑦 𝐷𝑠 (4.5) Wvyの分子を Npと,それ以外の零点に分けて次のよ うに変形する. 𝑊𝑣𝑦= 𝑁𝑝𝑁̂𝑣𝑦 𝐷𝑠 (4.6) したがって,制御器 C は次のように求められる. 𝐶 =𝑁̂𝑣𝑦 𝑁̂𝑞𝑦 (4.7)5 制御器の出力の足し合わせ
Fig. 4.2 に制御器の出力を足し合わせ,AMD 指令 値を得る部分のブロック線図を示す.振動子型の制Fig. 4.1 Block diagram of control system
御器から得られた出力と,従来型の制御器から得ら れた出力を,割合を変化させながら足し合わせ, AMD 指令値としている.割合を変化させるため, 建物の揺れの大きさに合わせて,0 から 1 の係数を 得られる関数が必要である.そこで本研究では,シ グモイド関数を採用し,2 種類の制御器それぞれに シグモイド関数を用意した.2 つのシグモイド関数 の式を下に示す.式(5.1)が振動子型の制御器の出力 を揺れの大きさによって調整するための関数で,式 (5.2)が従来型の制御器の出力を調整するための関数 である.x の値に応じて y1,y2が係数を出力する.
𝑦
1=
1
2
∙
1 − 𝑒
−ℎ2−ℎ2 1𝑎(𝑥−ℎ2+ℎ2 1)1 + 𝑒
−ℎ2−ℎ2 1𝑎(𝑥−ℎ2+ℎ2 1)∙
1 − 𝑒
𝑎1 + 𝑒
𝑎+
1
2
(5.1)
𝑦
2=
1
2
∙
1 − 𝑒
−ℎ2−ℎ2 1𝑎(𝑥−ℎ2+ℎ2 1)1 + 𝑒
−ℎ2−ℎ2 1𝑎(𝑥−ℎ2+ℎ2 1)∙
1 − 𝑒
−𝑎1 + 𝑒
−𝑎+
1
2
(5.2)
ここで,h1と h2は曲線部分の始点と終点である.建 物の揺れの振幅に対して h1と h2を設定することで, 揺れの強さによって h1と h2の間で滑らかに y の値が 変化するようにしている.式(5.1)の振動子型の制御 器用のシグモイド関数では,x が大きくなるに連れ て,y1は 0 から 1 に近づく.一方,式(5.2)の従来型 の制御器用のシグモイド関数では,x が大きくなる に連れて,y2は 1 から 0 に近づく. 建物の揺れの振幅は,振幅検出器とピーク・フィ ルタの組み合わせによって計算している.ピーク・ フィルタは次の式で表されるものである. 𝐺1= 𝑠2+ ζ 1𝑛ω𝑠 + 𝜔2 𝑠2+ ζ 1𝑑ω𝑠 + 𝜔2 (5.3) 振幅検出器単体では,加速度信号に含まれる不要な 信号を除去できないため,ピーク・フィルタによっ て,建物の固有振動数の揺れだけを抽出している. 振幅検出器は,Fig.3.2 に示した可変速度フィードバ ック型自励振動子内に含まれる振幅検出器と同一の 方法で、パラメータも等しい.6 シミュレーション
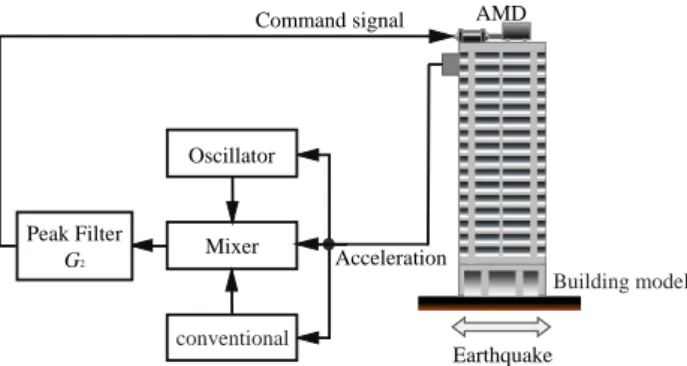
6.1 シミュレーションの概要 提案手法の有効性を示す為に Fig. 6.1 のように高 層建物が地震によって加振される状況をシミュレー ションした.ただし,簡単化の為に,22 階建ての建 物を 1 次モードに着目して作ったバネ・マス・ダン パによる Fig. 6.2 に示す等価 1 質点モデルを制御対 象とした.Table 6.1 に等価 1 質点モデルのパラメー タを示す. 等価 1 質点モデルを地震波で加振し,AMD を提案 手法で稼動させた場合の建物の応答と,制振しなか った場合の応答を比較し,制振性能を評価する.Fig. 6.1 Block diagram of simulation
Oscillator conventional Building model Earthquake AMD Mixer Command signal Acceleration Peak Filter G2
Fig. 6.2 1 DOF model of building with AMD
Table 6.1 Parameters of model with AMD
Weight M [kg] 2963 × 103 Stiffness K [N/m] 4.19 × 107 Damping C [Ns/m] 2.10 × 105 AMD Mass ma [kg] 15.0 × 103
Table.6.2 Parameters of actuator
Gain K 1 Natural Frequency ω𝑎[rad/s] 31.4
Damping Ratio ζ 0.2
Table 6.3 Parameters of peak filter G2 Resonance Frequency ω [rad/s] 3.76 Damping Ratio in Numerator ζ2𝑛 100 Damping Ratio in Denominator ζ2𝑑 1
更に,AMD を提案手法で稼動させた場合の AMD の移動距離と,従来型の制御器だけで稼動させた場 合の移動距離を比較し,AMD の移動距離の抑制効 果を確認する. 地震波の入力として,気象庁が東日本大震災時に 仙台市内で観測したデータ 8)を用いた.サンプリン グ周波数は 100 Hz で全シミュレーション時間は 360 秒の加速度データである.質点の揺れは絶対加速度 として加速度計で計測できる状態を想定し,質点の 絶対加速度を制御器に入力として与えた.制御器の 出力は AMD の操作電圧で,AMD に変位指令を与え ている.本シミュレーションでは AMD の重りの移 動距離を±1 m 以内に収めることを目標とした. AMD の質量は 15 t としている.これは等価質量 の約 0.5 %にあたるが,この質量比を選択した理由 は小型 AMD の重りの質量は制御対象の一般化質量 の 0.5 %程度が一般的だからである1). 6.2 従来型の制御器の設計 地震波と AMD による制御力を受ける場合のモデ ルの運動方程式を式(3.1.2)に示す. (𝑀 + 𝑚𝑎)𝑥̈ + 𝐶𝑥̇ + 𝐾𝑥 = 𝑓𝑎− 𝑀𝑧̈ (6.2.1) ここで,faは AMD による制御力で,次の式で与え られる. 𝑓𝑎= −𝑚𝑎(𝑢̈ + 𝑥̈ + 𝑧̈) (6.2.2) 制御器から見て,制御対象は,AMD 変位指令値 u によって AMD が作動し,建物の絶対加速度𝑥̈ + 𝑧̈と なるまでの伝達関数である.AMD の変位指令値 u が建物の絶対加速度𝑥̈ + 𝑧̈となるまでの伝達関数は 次の様に求められる. 𝑋̈ + 𝑍̈ 𝑈 = −𝑚𝑎𝑠4 (𝑀 + 2𝑚𝑎)𝑠2+ 𝐶𝑠 + 𝐾 (6.2.3) ここで,U は AMD 変位指令値 u をラプラス変換し たものである.更に,AMD が変位指令値を受けて から実際に目標値に達するに遅れが存在する.本研 究では,AMD が Table 6.2 のような特性の 2 次遅れ 系として近似して,制御対象の一部として含める. AMD の伝達関数を式(6.2.4)に示す. 𝑈 𝑈𝑖𝑛= 𝜔2 𝑠2+ 2𝜁𝜔𝑠 + 𝜔2 (6.2.4) ここで,Uinはラプラス変換した変位指令値をである. 加えて,建物の揺れの固有振動数の信号だけを取り 出すために,取得した加速度に Table 6.3 の特性を持 つピーク・フィルタ G2を掛けている. 𝐺2=𝑠 2+ ζ 2𝑛ω𝑠 + 𝜔2 𝑠2+ ζ 2𝑑ω𝑠 + 𝜔2 (6.2.5) したがって,AMD 指令値から建物の加速度までの 伝達関数は次の式で表される. 𝑃𝑢𝑧= 𝑋̈ + 𝑍̈ 𝑈 ∙ 𝑈 𝑈𝑖𝑛∙ 𝐺2= −𝑚𝑎𝑠4 (𝑀 + 2𝑚𝑎)𝑠2+ 𝐶𝑠 + 𝐾∙ ω𝑎2 𝑠2+ 2𝜁ω𝑎𝑠 +ω𝑎2∙ 𝑠2+ ζ 𝑛ω𝑠 + 𝜔2 𝑠2+ ζ 𝑑ω𝑠 + 𝜔2 (6.2.6) したがって,プラントの伝達関数は 6 次の特性多項 式を持つといえる.本研究では,取得できる状態量 は質点の絶対加速度だけである.したがって,自由 に極配置を行うためには,更に 5 個の極が必要であ る.加えて,カットオフ周波数 0.8 Hz の 1 次ローパ スフィルタを含めて設計した為,1 個の極が追加さ れる.ローパスフィルタは実験で使用されるノイズ 対策のローパスフィルタを模擬するためのものであ る.以上より,システム全体の特性多項式を Dsの次 数は 12 次となる. 𝐷𝑠= (𝑠 − 𝑝1)(𝑠 − 𝑝2) ⋯ (𝑠 − 𝑝12) (6.2.7) 各項の極 p1~p12の数値は Table 6.4 の通りである. 最後に,制御器 C を求める.求める性能に応じて, Wqu,Wvuの分子の次数を決定する.本研究ではWqu にフィルタ特性を持たせることはないので,分母・ 分子の次数が等しくなるように分子の次数を調整し た.一方で,Wquに1 次のローパスフィルタ特性を 持たせるので,分母より分子の次数が1 次だけ多く なるように分子の次数を調整した.よって, 𝑁̂𝑞𝑦=𝑐6𝑠6+ 𝑐5𝑠5+ 𝑐4𝑠4+ 𝑐3𝑠3+ 𝑐2𝑠2+ 𝑐1𝑠1+ 𝑐0 (6.2.8) 𝑁̂𝑣𝑦=𝑛5𝑠5+ 𝑛4𝑠4+ 𝑛3𝑠3+ 𝑛2𝑠2+ 𝑛1𝑠1+ 𝑛0 (6.2.9) したがって,フィードバック制御器 C は次のように 求められる. 𝐶 = 𝑛5𝑠 5+ 𝑛 4𝑠4+ 𝑛3𝑠3+ 𝑛2𝑠2+ 𝑛1𝑠1+ 𝑛0 𝑐6𝑠6+ 𝑐5𝑠5+ 𝑐4𝑠4+ 𝑐3𝑠3+ 𝑐2𝑠2+ 𝑐1𝑠1+ 𝑐0 (6.2.10) 6.3 振動子型の制御器の定数 振動子型の制御器のパラメータを Table 6.5 に示す. 建物の揺れの周波数で AMD を±1m 動かす指令値を 出力するように目標振幅を設定した.振動子のパラ メータ m,k は振動子の固有振動数と等価 1 質点モ Table 6.4 Parameters of p1-p12 nth Pole Value
p
1, p
2−0.750 ± 3.68j
p
3, p
4−1.88 ± 3.26j
p
5, p
6−6.28 ± 30.8j
p
7, p
8−0.750 ± 3.68j
p
9-p
12-5.03
デルの固有振動数である 0.59 Hz が一致するように 決定した.c は自励振動の様子を観察しながら決定 した. 振動子型の制御器のノッチフィルタの定数は, 建物の固有振動数と一致させた.また,𝜁𝑛と𝜁𝑑は, 周波数 2でのゲイン低下が極力大きくなるように 決定した. 振幅コントローラの PID ゲインは,AMD の振幅 が±1 m 以内に収まり,かつ建物の揺れの変動が振 動子の振幅に極力現れないように試行錯誤的に調整 した. 6.4 2 種類の制御器の出力を足す部分の定数 振幅検出器には,式(5.3)に示したピーク・フィル タ G1を通して建物の絶対加速度出力を与えた.ピー ク・フィルタ G1の各定数は Table 6.6 の通りである. 各定数は試行錯誤的に選んだ. 振幅検出器によって得られた建物の揺れの包絡線 の値は,式(5.1)と式(5.2)に示したシグモイド関数の 引数となる.シグモイド関数に含まれる各定数は Table 6.7 の通りである.各定数はシミュレーション を繰り返すことで試行錯誤的に選んだ.Fig.6.3 にシ グモイド関数 y1と y2を示す.
7 シミュレーション結果
Fig.7(a)に質点の加速度時刻歴を示す.黒が制御し ていない場合で,赤が提案手法を用いて制御した場 合である.提案手法を用いた場合の方が制御してい ない場合よりも小さくなっている.揺れが顕著な 150 秒から 350 秒までの RMS 値を計算すると,制御 していない場合は 0.670 m/s2 で,制御した場合は 0.391 m/s2という結果が得られ,41.6 %の低減が確認 できた. このときの AMD の変位を Fig.7(b)に示す.青が従 来型の制御器だけを用いて制御した場合の AMD の 変位である.一方,赤が提案手法で制御した場合の AMD の変位である.2 本の黒の破線は目標値として 設定した±1 m を表している.提案手法によって, AMD 変位を抑制することが出来たと言える.従来 型の制御器を用いた場合は±1 m を大きく超えて最 大値は 5.03 m であったが,提案手法で制御した場合 は殆どの時間で目標値である±1 m 前後に収まって いるからである.目標値を超えた場合の最大値は 1.22 m であった.目標値を超えて AMD が動作した 原因は後に考察する. 一方,本研究で提案したシグモイド関数による 2 種類の指令値の足し合わせの手法によって,滑らか に 2 種類の指令値を切替えることができると分かっ た.Fig.7(a)の加速度時刻歴を見ると,約 190 秒付近 を除き、衝撃的な力が加わったときに見られるパル ス状の加速度応答は見られず,また Fig.7(b)の AMD 変位の時刻歴を見ても不連続的な変化が見られない からである. ここで、Fig.7(a)の約 190 秒でパルス的な加速度応 答が見られた原因を考察する。パルス的な応答は、 建物の揺れの大きさが急に変化したことに起因する ものと考えられる。シグモイド関数を用いても、揺 れの大きさが急に変化する場合、制御器が素早く切 り替わることで、僅かながら衝撃的な力を建物に加 えることが考えられるからである。 次に,目標値を超えて AMD が動作した原因につ いて考察する.Fig.7(b)の AMD 変位の時刻歴を見る と,最も AMD 変位が 1m を超えている 200 秒付近 であることが分かる.200 秒付近は建物の揺れが大 きい時間帯で,主に振動子型の制御器の出力が変位 指令値として AMD に入力される時間帯である.こ の時間帯では,AMD 変位が全体的にマイナス側へTable.6.6 Parameters of peak filter G1 Resonance Frequency ω [rad/s] 3.76 Damping Ratio in Numerator ζ1𝑛 100 Damping Ratio in Denominator ζ1𝑑 1
Table.6.7 Parameters of sigmoid Functions
y1 y2
h1 0.2 0.1 h2 0.6 0.6
a 5 4
Fig.6.3 Trajectories of both sigmoid functions
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 C o ef ficien t Acceleration [m/s2] Compensator Oscillator
Table 6.5 Parameters of oscillator
m
1
k
14.2
c
10
𝜁𝑛0
𝜁𝑑94.1
𝜔3.76
P
80
I
2
D
20
Reference Amplitude [m]
1
偏っている.したがって,建物の大きな揺れの影響 を振動子が十分に抑圧できなかったと考えられる. 振動子の振幅を制御するのは振幅コントローラなの で,目標値を超えて AMD が動作した原因は振幅コ ントローラの PID 制御器にあったのではないかと考 えられる.より外乱抑圧特性の高い制御器に変更す れば,この問題は解決されると考えられる. 以上の結果から,振動子型の制御器の出力と,従 来型の制御器の出力を揺れの大きさによって比率を 変化させながら足し合わせて AMD 指令値を生成す る方法によって,可動マスの移動距離を大幅に抑制 することに成功したといえる.また,振幅コントロ ーラの改良によって,装置の許す範囲内で可動マス を収められる可能性がより一層高まると予測される.
9 結言
振動子型の制御器の出力と,従来型の制御器の出 力を,揺れの大きさによって比率を変化させながら 足し合わせて AMD 指令値を生成する方法を提案し た.振動子型の制御器には可変速度フィードバック 型自励振動子を利用した.また,従来型の制御器に はモデルマッチング法によって設計した制御器を利 用した.2 種類の制御器から得られた出力の足し合 わせにはシグモイド関数を利用した.1 質点に低次 元化した建物のモデルが,地震波によって加振され る状況をシミュレーションし,提案手法によって大 幅に可動マスの移動距離を制限することが可能であ ることを示した.10 参考文献
1) 日本建築学会編,建築構造物の振動制御入門, (2010),p.30,pp.61-79 2)本宮潤一,射場大輔,中村守正,森脇一郎,神経 振動子を用いたアクティブ動吸振器の地震入力 に対する応答解析,日本機械学会 Dynamics and Design Conference 2011 CD-ROM 論文集,(2011) 3)川井伸泰,大塚将,稲葉金正,持丸昌巳,栗本雅 裕,アクティブ制振システムの開発(その 3:可 変ゲイン制御による振動台試験結果),日本建築 学会学術講演梗概集.B,構造I(1994) 4)鈴木哲夫,蔭山満,野畑有秀,岡田宏,福井宏治, 中高層建物のアクティブ制振システム(その 14. 可変ゲイン制御結果),日本建築学会学術講演梗 概集.B,構造I(1993) 5)栗田裕,松村雄一,後伸昌,村岸恭次,可変フィ ードバックで制御された自励振動子群の引き込 み現象,機械学会論文集 C 編,(2004),vol.70, no.690,pp.349-355 6)仙田群,本宮潤一,射場大輔,中村守正,森脇一 郎,構造物の応答と同期した神経振動子を用いた 動 吸 振 器 の 位 置 制 御 , Dynamics and Design Conference 2012 USB 論文集,(2012)7)Yasutaka Tagawa, Ryozaburo Tagawa, David Stoten, Characteristic transfer function matrix-based
linearfeedbackcontrol system analysis and synthesis, pp. 585-602, (2009), Taylor & Francis
8)気象庁|強震波形 http://www.data.jma.go.jp/svd/eqev/data/kyoshin/jish in/110311_tohokuchiho-taiheiyouoki/index.html 9)芳村敏夫,横山隆,日野順市,基礎振動工学[新 訂版],(2010),pp.29-34,共立出版 10)栗田裕,村岸恭次,安田均,可変フィードバッ クゲインによる自励振動形振幅機械の振幅一定 制御,機械学会論文集 C 編,(1996),vol.62,no.598, pp.2140-2146
Fig.7 Results of simulation under seismic excitation (a) Time history of building acceleration