4.結 論 ショットピーニング加工が SUS316 鋼の疲労き裂の発生 および進展挙動に対する時間依存性を評価するために,シ ョットピーニングの Zr ビーズ直径を変化させて実験を行 った結果得られた結論は以下の通りである. 1)ショットピーニング加工は,疲労き裂の発生寿命に及ぼ す時間依存性がある.この時間依存性は,大荷重ではき裂 の発生寿命改善の効果は小さくなるが,切欠先端に有効な ショットが投射できるビーズ径において,Zr ショット直径 の増大に伴い付与される残留応力が拡大し,き裂発生の遅 延効果が向上する. 2)ショットピーニング加工は,疲労き裂の進展挙動に及ぼ す時間依存性がある.疲労き裂発生後の挙動については, 疲労き裂のき裂開口挙動と進展速度で異なる性質を示した. Zr ビーズ直径の増加に伴い,試験片の深さ方向の残留応力 層と硬度上昇領域が拡大し,き裂開口変位は小さくなる. その反面,一端発生した開口量の小さなき裂はショットピ ーニングなしの状態と比較して,き裂進展速度が増加する. このことは,ショットピーニング加工材が加工なしの状態 と比較して,き裂の進展速度が大きくなることを表す. 参 考 文 献
1) Honda, T., Yamaguti, A., Kobayashi, A. S. and Ramulu, M.: Effect of
surface roughness on fatigue strength of shot peened aluminum alloy, JSME MECJ-06, (2006), 783-784.
2) Takahashi, K., Amano, T., Hanaori, K., Ando, K. and Takahashi, F.: Improvement of fatigue limit by shot peening for high strength steel specimens containing a crack-like surface defect, The Society of Materials Science, (2009), 1030-1036.
3) Nishikawa, M., Takakuwa, O. and Soyama, O.: Evaluation of yield stress distribution in the surface layer and fatigue properties of the stainless steel modified by cavitation peening, Trans. Japan Soc. Mech. Eng., Series A 76-770, (2010), 1367-1372.
4) Kuroda, M., Akita, Y., Kobayashi, Y. and Tsuji, T.: Prediction of the surface characteristics of shot-peened stainless steels by statistical design of experiments, Trans. Japan Soc. Mech. Eng., 84- 65, (2018), 18-00150.
5) Takahashi, S., Hashimoto, M., Hirose, H. and Sasaki, T.: Effect of shot-peening process on fatigue strength of austenite stainless steel, Trans. Japan Soc. Mech. Eng., Series A 66- 646 (2000), 1172-1177 6) Ochi, Y, Akashi, A., Masaki,K., Miura, T., Internal Crack Initiation
and Propagation Behaviors in High Cycle Fatigue of HSP-treated SUS 316L Steel, Trans. Japan Soc. Mech. Eng., Series A 66- 642, (2000), 320-325.
7) Ikeda, N. Shozu, M. Murotani, T., Hirose, H., Study on Residual Stresses Induced by Shot Peening Process of Austenite Stainless Steel SUS 304, Journal of the Japanese Society for Strength and Fracture of Materials., 37-3, (2003), 47-53.
8) Izawa, S. and Kobayashi, A. S.: Fatigue of stainless steel SENB specimen - A CTOA interpretation, CD-ROM Proc. of the 2005 SEM Annual Conf. and Exposition on Experimental and Applied Mechanics (2005).
9) Izawa, S., Effect of Zr shot peening on fatigue crack growth and crack opening in SUS316 SENB specimens, DVD-ROM Proc. of the International Conference on Advanced Technology in Experimental Mechanics 2015, (2015).
大菱中手関節の MRI による 3 次元生体内接触動態解析
森 清 友 亮
*,坂 本 信
**,坂 上 勇 太
*風 間 清 子
***,小 林 公 一
**,田 邊 裕 治
*Three-dimensional In Vivo Analysis of the Trapeziometacarpal Joint
Contact Behavior
Using Magnetic Resonance Imaging
Yusuke MORISE, Makoto SAKAMOTO, Yuta SAKAGAMI
Kiyoko KAZAMA, Koichi KOBAYASHI and Yuji TANABE
Trapeziometacarpal joint (TMC joint) of thumb is one of the joints having a complicated shape which enables to generate a wide variation of finger movements in daily life. It is important to clarify the accurate in vivo contact behavior of healthy TMC joint when evaluating post-operative joint movements. Thus, author analyzed TMC joint contact behavior in 4 different finger positions of 8 healthy adult males using magnetic resonance imaging (MRI) system. From MR images, three-dimensional bone models were constructed and a three-dimensional coordinate system was defined by the characteristic shape of each bone model. Then, three bone axial angles and three-dimensional bone motion of each 4 positions in the TMC joint were calculated: abduction-adduction, extension-flexion, pronation-supination, and Euler angles. Furthermore, contact areas of the articular cartilage in each of 4 positions were clarified from MR images. Results have shown that, the contact area changed with changing of the thumb position and it was maximum oat the thumb extension. In addition, it was clarified that the contact area moved according to the thumb position.
Keywords: Biomechanics, Thumb, Trapeziometacarpal joint, MRI, Contact area, Contact centroid, Articulating surface
motion, Joint coordinate system 1.緒 言
ヒトの母指は他4 本の指に対して向き合う方向に運動で
きることが特徴である.これによりヒトは日常において物 を握る(Grasping),つまむ(Pinching)といった動作が可 能になっている.母指を構成する関節として指節間関節 (Interphalangeal joint: 以下 ,IP 関 節), 中 手指 節関 節 (Metacarpophalangeal joint: 以下,MCP 関節),大菱中手関 節(Trapeziometacarpal joint: 以下,TMC 関節)の 3 つの関 節がある.TMC 関節(Fig. 1)は大菱形骨(Trapezium: 以 下,TRZ)と中手骨底部(Metacarpal base: 以下,MCB)か らなる2 軸性の可動関節であり,両関節面が鞍の背面様の 形状を持つ鞍関節として分類される1).鞍形状は凸と凹形 状が3 次元的に直交する形状であり,その複雑な形状をも って伸展屈曲,内外転および描円運動が可能になる.この ような形状を持つ TMC 関節は,他指に比しても高い自由 度を有し,その機能により母指は対立運動を可能とし,日 常生活における複雑な動作を可能にする. ヒト手指関節の接触運動をバイオメカニクスに基づい て解析することは,関節リウマチをはじめとする疾患に対 する治療法,人工関節の設計や5 本指ロボットハンドを開 発する上で重要である.しかし,これまでに複雑な手指の 接触動態について検討した例は多くはない.これは生体内 部に存在する関節の接触運動を測定する手法が限定されて いることに起因している. TMC 関節の生体外(屍体)実験のバイオメカニクスの先 駆的研究としては,Momose ら2)による18 屍体指を用いた 研究があげられる.彼らはTMC 関節に約 10 N の牽引力を
Fig. 1 X-ray and MR images of the right hand
TMC joint TRZ MCB MCP joint IP joint 原稿受付 2019 年 10 月 24 日 * 正会員 新潟大学大学院自然科学研究科(〒950-2181 新 潟県新潟市西区五十嵐2 の町 8050) ** 正会員 新潟大学医学部(〒951-8518 新潟県新潟市中央 区旭町通2-746) ***新潟手の外科研究所病院(〒957-0117 新潟県北蒲原郡聖 籠町大字諏訪山997) 実験力学 Vol. 20, No. 1 pp.39―44(2020 年 3 月)
与えて,関節内部にシリコンゴムを注入し,キャスティン グすることで,関節の接触面積を測定した.Koff ら3)は25 の切断肢の関節運動を再現するとともに,ステレオフォト グラメトリ 4)を用いて関節軟骨の接触面積を求めた. Chenowethra ら5)は,6 屍体の大菱形骨および中手骨にピン を挿入し,その角度を測定することによって関節動揺性と 軟部組織の関係を明らかにした.最近では,Kawano ら6) が 6 屍体の母指に対して,関節周りの筋に張力を作用させ, TMC 関節の固定が母指の可動域に与える変化を示した.こ れら切断肢を用いた研究は,様々な条件設定によるシミュ レーションが可能である反面,生体内での力学的環境を模 擬することが極めて困難であることから,臨床的な結果の 解釈が難しい場合がある. 一方,生体内の条件においての解析は極めて少なく, D'Agostino ら 7)に よ る X 線 コ ン ピ ュ ー タ 断 層 撮 影 (Computed Tomography: 以下,CT)により得られた画像 から構築した3DCT 骨モデルの関節面曲率を用いて,健常 16 例および変形性関節症患者 6 例の骨表面形状を評価する とともに,同モデル関節面近接量からTMC 関節の軟骨接 触領域分布をシミュレーションした研究があげられる程度 である.この研究では,CT 画像には軟骨情報が含まれな いためにTRZ および MCB 表面に均一な厚さの擬似軟骨を 付加して,軟骨間同士の近接量によって接触領域分布傾向 を示しているが,軟骨接触面は推定計算値である. これに対して著者ら 8)は先に,軟骨描写に優れた核磁気
共鳴画像法(magnetic resonance imaging 以下,MRI)を用
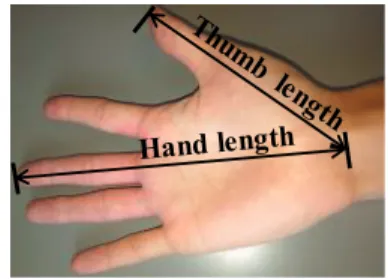
いて関節軟骨形状を考慮し,健常者8 名の日常動作におけ る母指IP および母指 MCP 関節の生体内での 3 次元接触領 域分布,接触面積および関節の回内運動について明らかに した.本研究では,われわれのMRI による研究手法を利用 して,母指TMC 関節の内転,外転,伸展および屈曲の 4 肢位での3 次元接触動態を明らかにすることを目的とした. 2.方 法 2.1 対象および撮像方法 本研究は成人男性8 名の右手(平均年齢 23.1 ± 2.0 歳, 平均手長187.1 ± 6.2 mm,平均母指長 136.1 ± 8.8 mm)TMC 関節を対象とした.なお,手長と母指長はFig. 2 に示すよ うに手首中央から各指の先端までの直線距離として定義し た. 母指のMR 撮像には四肢専用の 1.5T-MRI 装置(Healthcare Optima MR430s,GE)を使用し,直径 123 mm の円形 RF コイルを用いて関節部の矢状断画像を撮影した.設定肢位 は内転(Adduction: 以下,ADD),外転(Abduction: 以下, ABD),伸展(Extension: 以下,EXT),屈曲(Flexion: 以 下,FLEX)(Fig. 3)とした.撮像時,アクリル製固定具を 用いて肢位の固定を行い無負荷状態とした. 撮像シーケンスは3D-GRE T1 Fatsat を使用し,撮像条件
は,TR(repetition time): 60 ms, TE(echo time): 13.4 ms, flip angle: 20°, Slice thickness: 1.5 mm, Matrix size: 512 × 512, Imaging time ≈ 13 min とした.脂肪抑制を行うシーケンスを 使用していることから,その影響により皮膚表面近傍が不 鮮明な画像になることを防ぐために ,クリスタルゲル (CRG-N0502,タナック)で対象部位の皮膚表面を被覆し た.本研究は新潟大学倫理委員会の承認を受けて行った(承 認番号2017-0073). 2.2 測定および解析 軟骨接触領域の判定は画像解析用ソフト(ImageJ,NIH) を用いて,TMC 関節近傍部の MR 画像輝度プロファイルに より決定した(Fig. 4)8). 3D-GRE 法による脂肪抑制 T1 強調像画像は,関節軟骨を 白く(高輝度)描出し,関節液を黒く(低輝度)描出する. Fig. 4(a)に示すような一峰性プロファイルは接触とした.ま
Fig. 4 Contact definition of MRI signal intensity profile of cartilage image (a) One peak profile was defined as contact, (b) 2-peak profile (P2/P1 ≥ 0.85) was defined as contact, (c) 2-peak profile (P2/P1< 0.85) was defined as non-contact
(a) contact (b) contact (c) non-contact Distance P1 P2 P1 P2 a b c In te n sit y
Fig. 3 MR imaging positions of TMC joint
① ABD
② ADD
③ EXT
④ FLEX
③
ABD - FLEX - ADD EXT - FLEX
④
④
②
①
Fig. 2 The definition of hand length and thumb length
た,Fig. 4(b),(c)に示すような二峰性プロファイルの場合 には,プロファイルの谷部分の輝度値 P2が最大輝度値 P1 の85%以上(P2/ P1 ≥ 0.85)であるときを接触とし,85%未 満(P2/ P1 < 0.85)のときを非接触と判定した.取得した MR 画像全スライスにおいて各スライスにおける接触部の 長さを取得し,接触長さの総計にスライス厚1.5 mm を乗 じることで接触面積とした(Fig.5).本手法を用いて算出 する接触面積は著者らによる以前の研究8)において十分な 再現性が得られることを確認している. 一方,骨を3 次元的に表示するために,MR 画像から医
療用3 次元再構築ソフト(Zed View 9.3,LEXI),および
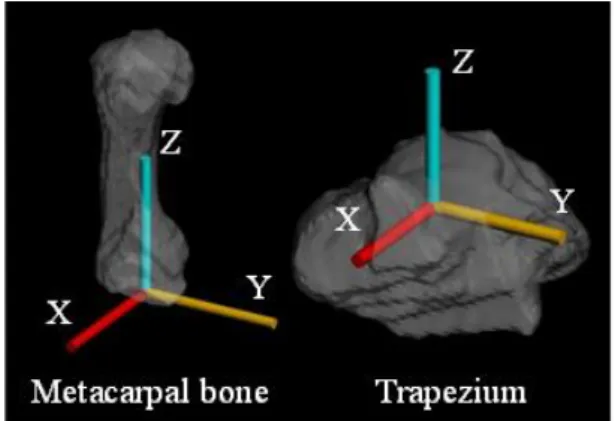
CAD ソフトウェア( Rhinoceros 5.0 ,Robert McNeel & Associates)を用いて,中手骨,大菱形骨および TMC 関節 軟骨を3D モデル化した.ここで,大菱形骨と中手骨の相 対的な3 次元運動を評価するため,MCB および TRZ に骨 座標系を設定した(Fig. 6). MCB 座標系において,主成分分析法により算出した第一 主成分をZ 軸とした.また,中手骨モデル表面上において 掌側および背側のそれぞれの最近位点を特徴点として目視 で判別し,その2 点を結ぶ直線を仮の Y 軸とした.X 軸は, 仮のY 軸と Z 軸との外積とし,Y 軸は,Z 軸と X 軸との外 積として定義した.TRZ 座標系は,関節面となる鞍形状部 において,橈尺側それぞれの最遠位となる2 点を結ぶ直線 をX 軸とし,同様に掌背方向においてはそれぞれ最前後方 向の2 点を参照点として,2 点を結ぶ直線を仮 Y 軸と定義 した.Z 軸,Y 軸は MCB 座標系と同様にそれぞれの軸の 外積を用いて定義した.座標系原点は,それぞれの仮Y 軸 構築に用いた2 点の中点においた.Z 軸は遠位方向,X 軸 は尺側方向,Y 軸は手掌方向を,それぞれ正とした.さら に骨座標系を用いて,関節の内外転角度(内転を正),屈曲 伸展角度(屈曲が正),回内外角度(回内が正)を算出した (Fig. 7). 内外転角度はTRZ 座標系の Z 軸と同 YZ 平面に投影した MCB 座標系 Z 軸のなす角,屈曲伸展角度は TRZ 座標系 Z 軸と同XZ 平面へ投影した MCB 座標系 Z 軸のなす角,回 内外角度は TRZ 座標系の X 軸と同 XY 平面に投影した MCB 座標系 X 軸のなす角として定義した.さらに本研究 では構築したそれぞれの骨座標系を用いてEXT から FLEX,
ABD から FLEX,FLEX から ADD への 3 次元運動を TRZ
座標系に関して X-Y’-Z”の順で計算されるオイラー角を用 いて評価を行った. 3.結 果 こ こ で は Fig. 3 を 参 考 に ABD-FLEX-ADD お よ び EXT-FLEX をそれぞれ同一平面内の動きと考えて結果を示 す.初めに,被験者8 名の TMC 関節各肢位における関節 外転角度,屈曲角度,外旋角度の平均を示した(Fig. 8). ABD から ADD における肢位変化に伴い関節外転角度は単 純増加し,ABD と ADD 間では有意に内転角度が増加した. 屈曲角度は単純減少傾向であった.外旋角度は ABD から ADD においても単純減少した.外転角度と同様に,ABD
とADD 間においては有意差が確認された.EXT から FLEX
においては外転角度および外旋角度は減少したが屈曲角度 は有意な増加が確認された. Fig. 9 に MCB および TRZ の 4 肢位の画像から算出した 関節軟骨表面積を示した.平均関節軟骨表面積はMCB に おいて120.6 ± 20.2 mm2,TRZ において 152.7 ± 20.0 mm2 で あり,TRZ 軟骨のほうが MCB に比して 1.3 倍程度広いこ とが確認された.
Fig. 7 Definition of the flexion-extension, abduction-adduction and pronation-supination angles in the two coordinate systems
Fig. 6 Three-dimensional coordinate system of the metacarpal bone and the trapezium
Contact length Slice thickness
Fig. 5 The yellow line indicates contact between MCB and TRZ. Contact area is determined by measuring the length of contact in each slice, multiplying this length by slice thickness of 1.5-mm, and summing these values
Flexion / Extension Pronation / Supination Abduction / Adduction +Abduction +Flexion +Pronation TRZ MCB TRZ MCB TRZ MCB TRZ MCB
与えて,関節内部にシリコンゴムを注入し,キャスティン グすることで,関節の接触面積を測定した.Koff ら3)は25 の切断肢の関節運動を再現するとともに,ステレオフォト グラメトリ 4)を用いて関節軟骨の接触面積を求めた. Chenowethra ら5)は,6 屍体の大菱形骨および中手骨にピン を挿入し,その角度を測定することによって関節動揺性と 軟部組織の関係を明らかにした.最近では,Kawano ら6) が 6 屍体の母指に対して,関節周りの筋に張力を作用させ, TMC 関節の固定が母指の可動域に与える変化を示した.こ れら切断肢を用いた研究は,様々な条件設定によるシミュ レーションが可能である反面,生体内での力学的環境を模 擬することが極めて困難であることから,臨床的な結果の 解釈が難しい場合がある. 一方,生体内の条件においての解析は極めて少なく, D'Agostino ら 7)に よ る X 線 コ ン ピ ュ ー タ 断 層 撮 影 (Computed Tomography: 以下,CT)により得られた画像 から構築した3DCT 骨モデルの関節面曲率を用いて,健常 16 例および変形性関節症患者 6 例の骨表面形状を評価する とともに,同モデル関節面近接量から TMC 関節の軟骨接 触領域分布をシミュレーションした研究があげられる程度 である.この研究では,CT 画像には軟骨情報が含まれな いためにTRZ および MCB 表面に均一な厚さの擬似軟骨を 付加して,軟骨間同士の近接量によって接触領域分布傾向 を示しているが,軟骨接触面は推定計算値である. これに対して著者ら 8)は先に,軟骨描写に優れた核磁気
共鳴画像法(magnetic resonance imaging 以下,MRI)を用
いて関節軟骨形状を考慮し,健常者8 名の日常動作におけ る母指IP および母指 MCP 関節の生体内での 3 次元接触領 域分布,接触面積および関節の回内運動について明らかに した.本研究では,われわれのMRI による研究手法を利用 して,母指 TMC 関節の内転,外転,伸展および屈曲の 4 肢位での3 次元接触動態を明らかにすることを目的とした. 2.方 法 2.1 対象および撮像方法 本研究は成人男性8 名の右手(平均年齢 23.1 ± 2.0 歳, 平均手長187.1 ± 6.2 mm,平均母指長 136.1 ± 8.8 mm)TMC 関節を対象とした.なお,手長と母指長はFig. 2 に示すよ うに手首中央から各指の先端までの直線距離として定義し た. 母指のMR 撮像には四肢専用の 1.5T-MRI 装置(Healthcare Optima MR430s,GE)を使用し,直径 123 mm の円形 RF コイルを用いて関節部の矢状断画像を撮影した.設定肢位 は内転(Adduction: 以下,ADD),外転(Abduction: 以下, ABD),伸展(Extension: 以下,EXT),屈曲(Flexion: 以 下,FLEX)(Fig. 3)とした.撮像時,アクリル製固定具を 用いて肢位の固定を行い無負荷状態とした. 撮像シーケンスは3D-GRE T1 Fatsat を使用し,撮像条件
は,TR(repetition time): 60 ms, TE(echo time): 13.4 ms, flip angle: 20°, Slice thickness: 1.5 mm, Matrix size: 512 × 512, Imaging time ≈ 13 min とした.脂肪抑制を行うシーケンスを 使用していることから,その影響により皮膚表面近傍が不 鮮明な画像になることを防ぐために ,クリスタルゲル (CRG-N0502,タナック)で対象部位の皮膚表面を被覆し た.本研究は新潟大学倫理委員会の承認を受けて行った(承 認番号2017-0073). 2.2 測定および解析 軟骨接触領域の判定は画像解析用ソフト(ImageJ,NIH) を用いて,TMC 関節近傍部の MR 画像輝度プロファイルに より決定した(Fig. 4)8). 3D-GRE 法による脂肪抑制 T1 強調像画像は,関節軟骨を 白く(高輝度)描出し,関節液を黒く(低輝度)描出する. Fig. 4(a)に示すような一峰性プロファイルは接触とした.ま
Fig. 4 Contact definition of MRI signal intensity profile of cartilage image (a) One peak profile was defined as contact, (b) 2-peak profile (P2/P1 ≥ 0.85) was defined as contact, (c) 2-peak profile (P2/P1< 0.85) was defined as non-contact
(a) contact (b) contact (c) non-contact Distance P1 P2 P1 P2 a b c In te n sit y
Fig. 3 MR imaging positions of TMC joint
① ABD
② ADD
③ EXT
④ FLEX
③
ABD - FLEX - ADD EXT - FLEX
④
④
②
①
Fig. 2 The definition of hand length and thumb length
た,Fig. 4(b),(c)に示すような二峰性プロファイルの場合 には,プロファイルの谷部分の輝度値 P2が最大輝度値 P1 の85%以上(P2/ P1 ≥ 0.85)であるときを接触とし,85%未 満(P2/ P1 < 0.85)のときを非接触と判定した.取得した MR 画像全スライスにおいて各スライスにおける接触部の 長さを取得し,接触長さの総計にスライス厚1.5 mm を乗 じることで接触面積とした(Fig.5).本手法を用いて算出 する接触面積は著者らによる以前の研究 8)において十分な 再現性が得られることを確認している. 一方,骨を3 次元的に表示するために,MR 画像から医
療用3 次元再構築ソフト(Zed View 9.3,LEXI),および
CAD ソフトウェア( Rhinoceros 5.0 ,Robert McNeel & Associates)を用いて,中手骨,大菱形骨および TMC 関節 軟骨を3D モデル化した.ここで,大菱形骨と中手骨の相 対的な3 次元運動を評価するため,MCB および TRZ に骨 座標系を設定した(Fig. 6). MCB 座標系において,主成分分析法により算出した第一 主成分をZ 軸とした.また,中手骨モデル表面上において 掌側および背側のそれぞれの最近位点を特徴点として目視 で判別し,その2 点を結ぶ直線を仮の Y 軸とした.X 軸は, 仮のY 軸と Z 軸との外積とし,Y 軸は,Z 軸と X 軸との外 積として定義した.TRZ 座標系は,関節面となる鞍形状部 において,橈尺側それぞれの最遠位となる2 点を結ぶ直線 をX 軸とし,同様に掌背方向においてはそれぞれ最前後方 向の2 点を参照点として,2 点を結ぶ直線を仮 Y 軸と定義 した.Z 軸,Y 軸は MCB 座標系と同様にそれぞれの軸の 外積を用いて定義した.座標系原点は,それぞれの仮Y 軸 構築に用いた2 点の中点においた.Z 軸は遠位方向,X 軸 は尺側方向,Y 軸は手掌方向を,それぞれ正とした.さら に骨座標系を用いて,関節の内外転角度(内転を正),屈曲 伸展角度(屈曲が正),回内外角度(回内が正)を算出した (Fig. 7). 内外転角度はTRZ 座標系の Z 軸と同 YZ 平面に投影した MCB 座標系 Z 軸のなす角,屈曲伸展角度は TRZ 座標系 Z 軸と同XZ 平面へ投影した MCB 座標系 Z 軸のなす角,回 内外角度は TRZ 座標系の X 軸と同 XY 平面に投影した MCB 座標系 X 軸のなす角として定義した.さらに本研究 では構築したそれぞれの骨座標系を用いてEXT から FLEX,
ABD から FLEX,FLEX から ADD への 3 次元運動を TRZ
座標系に関して X-Y’-Z”の順で計算されるオイラー角を用 いて評価を行った. 3.結 果 こ こ で は Fig. 3 を 参 考 に ABD-FLEX-ADD お よ び EXT-FLEX をそれぞれ同一平面内の動きと考えて結果を示 す.初めに,被験者8 名の TMC 関節各肢位における関節 外転角度,屈曲角度,外旋角度の平均を示した(Fig. 8). ABD から ADD における肢位変化に伴い関節外転角度は単 純増加し,ABD と ADD 間では有意に内転角度が増加した. 屈曲角度は単純減少傾向であった.外旋角度は ABD から ADD においても単純減少した.外転角度と同様に,ABD
とADD 間においては有意差が確認された.EXT から FLEX
においては外転角度および外旋角度は減少したが屈曲角度 は有意な増加が確認された. Fig. 9 に MCB および TRZ の 4 肢位の画像から算出した 関節軟骨表面積を示した.平均関節軟骨表面積はMCB に おいて120.6 ± 20.2 mm2,TRZ において 152.7 ± 20.0 mm2 で あり,TRZ 軟骨のほうが MCB に比して 1.3 倍程度広いこ とが確認された.
Fig. 7 Definition of the flexion-extension, abduction-adduction and pronation-supination angles in the two coordinate systems
Fig. 6 Three-dimensional coordinate system of the metacarpal bone and the trapezium
Contact length Slice thickness
Fig. 5 The yellow line indicates contact between MCB and TRZ. Contact area is determined by measuring the length of contact in each slice, multiplying this length by slice thickness of 1.5-mm, and summing these values
Flexion / Extension Pronation / Supination Abduction / Adduction +Abduction +Flexion +Pronation TRZ MCB TRZ MCB TRZ MCB TRZ MCB 実験力学 Vol. 20, No. 1(2020 年 3 月)
Fig. 10(a)には,関節軟骨表面積と母指長の関係,Fig. 10 (b)に関節軟骨表面積と手長の関係を示し,Spearman の 順位相関係数ρ を求めた.TRZ 軟骨表面積と母指長さの間 にρ = –0.228 と低い負の相関がみられた(p = 0.583).TRZ 軟骨表面積と手長の間にはρ = 0.563 と正の相関がみられ た(p = 0.134). MCB 軟骨表面積と母指長,手長の間では それぞれρ = –0.120(p = 0.775),ρ = 0.156(p = 0.701)の相 関係数が得られ,ほとんど相関がなかった.いずれにおい ても統計的に有意な相関は確認されなかったが,TRZ 軟骨 表面積と手長の間にのみ比較的高い相関傾向が確認された. これより,関節軟骨表面積は TRZ 軟骨表面において軟骨接 触面積に影響を及ぼす可能性が考えられる.そこで,Fig. 11 に関節軟骨接触面積を各被験者の TRZ 関節軟骨表面積で 除した関節軟骨接触面積比を示した.ABD-FLEX-ADD 位 における接触面積比はほとんど変化が認められなかった. EXT-FLEX にかけては接触面積比が有意に減少した. TMC 関節における FLEX 位を基準とし,EXT-FLEX, ABD-FLEX,FLEX-ADD でのオイラー角を用いた相対的な 屈曲,内転,外旋角度変化を Fig. 12 に示す.EXT-FLEX 間においては,わずかな外転および外旋運動が認められる が,屈曲角度が 21.2 ± 10.7°であり,3 軸の中では最大の角 度変化であった.ABD-FLEX-ADD 面では運動に伴い内転 運動だけではなく同程度の内旋運動が認められた.また, ABD-FLEX では屈曲伸展運動がほぼ認められない が, FLEX-ADD では約 10°の伸展運動が生じている. TMC 関節における FLEX 位を基準とし,EXT-FLEX, ABD-FLEX,FLEX-ADD でのオイラー角を用いた相対的な 屈曲,内転,外旋角度変化を Fig. 12 に示す.EXT-FLEX 間においては,わずかな外転および外旋運動が認められる が,屈曲角度が 21.2 ± 10.7°であり,3 軸の中では最大の角 度変化であった.ABD-FLEX-ADD 面では運動に伴い内転 運動だけではなく同程度の内旋運動が認められた.また, ABD-FLEX では屈曲伸展運動がほぼ認められない が, FLEX-ADD では約 10°の伸展運動が生じている. Fig. 13 に典型例として,被験者 8 名中 2 名(#1,#2)の TMC 関節骨表面における各肢位の 3 次元軟骨接触領域分 布を示す.赤色の領域が接触面を示す.また,Fig. 14(a)に は ABD-FLEX-ADD における接触領域図心点の平均位置を 示し,Fig. 14(b)に EXT-FLEX における接触領域図心点の平 均位置を示した. (b)
Fig. 10 (a) Relationship between the articular cartilage surface areas of the TMC joint and the thumb length, (b) Relationship between the articular cartilage surface areas of the TMC joint and the hand length
(a) 60 80 100 120 140 160 180 200 110 130 150 A r ti c u la r c a r ti la g e a r e a [ m m 2] Thumb length [mm] MCB TRZ ρ = –0.23 ρ = –0.12
Fig. 9 Average articular cartilage surface area of 4 positions for MCB and TRZ 0 20 40 60 80 100 120 140 160 180 200 MCB TRZ A r ti c u la r c a r ti la g e s u r fa c e a r e a [ m m 2] (a) (b)
Fig. 8 Bone adduction, flexion and pronation angle for the ABD, ADD, FLEX and EXT positions, (a) Comparison between ABD, FLEX and ADD, (b) Comparison between EXT and FLEX 60 80 100 120 140 160 180 200 170 180 190 200 A r ti c u la r c a r ti la g e a r e a [ m m 2] Hand length [mm] MCB TRZ ρ = 0.56 ρ = 0.16 -30 -15 0 15 30 45
ABD FLEX ADD
B o n e a n g le [ o] ADD/ABD FLEX/EXT SUPI/PRO
*
p < 0.05*
*
-30 -15 0 15 30 45 EXT FLEX B o n e a n g le [ o] ADD/ABD FLEX/EXT SUPI/PRO*
p < 0.05*
被験者ごとの接触領域図心点位置座標や肢位間の変位 量は被験者の骨の大きさやアスペクト比によって異なり, 単純比較はできないと考えられるため,各被験者ごとの骨 座標系構築時に取得した特徴点を用いて接触図心点位置を 基準化した後に平均化している.ABD から ADD への肢位 変化に伴い,TRZ 骨表面においては接触領域の図心点が Dorsal(背側)から Volar(掌側)へと骨の凹形状に沿って 移動した.このとき ABD - FLEX において,平均図心位置 の Dorsal - Volar 方向への変化を確認した. MCB において は大きな図心位置の変化はみられなかった.EXT-FLEX に おいては Radial(橈側)から Ulnar(尺側)へと MCB 骨表 面凹形状に沿って図心点の移動が確認された.TRZ 表面で は大きな変化はみられなかった. 4.考 察 Fig. 10 では TRZ 関節軟骨表面積は手長と正の相関があ り,母指長とは低い負の相関があることを示した.MCB と手長,母指長においてはいずれも相関がみられなかった. これまで著者らによる研究 6)では母指を構成する指節骨お よび中手骨遠位部関節軟骨表面積はすべて手長と高い正の 相関を示しており,本研究が対象としたMCB および TRZ においては異なる結果となった.本結果は指節骨によって 構成される関節軟骨表面積は手長に依存するが,手根骨に よって構成される関節はその限りではない可能性を示唆し ており,さらなる検討が必要である. Fig .11 に各肢位における関節軟骨接触面積比の結果よ り,EXT 位において最大接触面積を示した.今回設定した EXT 位は Pinching や Grasping をはじめとした日常生活動作 (Activity of daily life: ADL)時において頻出する動きに対 応した肢位となっている.著者らの以前の研究において母 指IP,MCP 関節に対して同様の手法を用いて接触動態を明 らかにしたが,それらの関節においても同様に高負荷がか かると考えられる肢位において最大接触面積となった.母 指を構成するいずれの関節においても,一般に関節に力が 作用するとされる ADL 肢位において最大接触面積となる 結果が得られたことは,母指を構成する各関節の形状は高 負荷時に関節に作用する力を相互に分散する能力を有して いると推測できる. EXT-FLEX 運動面は屈曲伸展運動を主とした運動面とし て評価した.Fig.14 の結果より,EXT-FLEX 運動時,MCB 表面上では骨の凹方向に沿った動きをしており,TRZ 骨表 面上ではほとんど動きがみられない.Fig. 12 の結果から EXT-FLEX 肢位間の関節角度変化は屈曲角度変化が最大でFig. 14 3D points of the average centroid of the cartilage contact area in the four positions
MPB
TRZ
EXT FLEX ABD ADD VOLAR DORSAL ULNAR RADIAL DORSAL VOLAR DORSAL DORSAL ULNAR RADIAL ULNAR
RADIAL RADIAL ULNAR
#1
#2
Fig. 13 Typical 3D distributions of the contact area on the cartilage of the TMC joint in two subjects
Fig. 12 Relative joint angle change for the movements from EXT to FLEX, ABD to FLEX and FLEX to ADD
-20 -10 0 10 20 30 40 ADD(+)/ABD(-) FLEX(+)/EXT(-) PRONATION(+)/SUPINATION(-)
EXT→FLEX ABD→FLEX FLEX→ADD
R o ta ti o n a l a n g le [ o ] (a) (b)
Fig. 11 Normalized articular cartilage contact area for the ABD, ADD, FLEX and EXT positions, (a) Comparison between ABD, FLEX and ADD, (b) Comparison between EXT and FLEX
*
0 20 40 60 80 100ABD FLEX ADD
C a r ti la g e c o n ta c t r a ti o [ % ]
*
p < 0.05 0 20 40 60 80 100 EXT FLEX C a r ti la g e c o n ta c t r a ti o [ % ]*
p < 0.05 MPB TRZEXT FLEX ABD ADD
VOLAR DORSAL DORSAL ULNAR RADIAL ULNAR RADIAL MPB TRZ
EXT FLEX ABD ADD
VOLAR DORSAL DORSAL ULNAR RADIAL ULNAR RADIAL
Fig. 10(a)には,関節軟骨表面積と母指長の関係,Fig. 10 (b)に関節軟骨表面積と手長の関係を示し,Spearman の 順位相関係数ρ を求めた.TRZ 軟骨表面積と母指長さの間 にρ = –0.228 と低い負の相関がみられた(p = 0.583).TRZ 軟骨表面積と手長の間にはρ = 0.563 と正の相関がみられ た(p = 0.134). MCB 軟骨表面積と母指長,手長の間では それぞれρ = –0.120(p = 0.775),ρ = 0.156(p = 0.701)の相 関係数が得られ,ほとんど相関がなかった.いずれにおい ても統計的に有意な相関は確認されなかったが,TRZ 軟骨 表面積と手長の間にのみ比較的高い相関傾向が確認された. これより,関節軟骨表面積は TRZ 軟骨表面において軟骨接 触面積に影響を及ぼす可能性が考えられる.そこで,Fig. 11 に関節軟骨接触面積を各被験者の TRZ 関節軟骨表面積で 除した関節軟骨接触面積比を示した.ABD-FLEX-ADD 位 における接触面積比はほとんど変化が認められなかった. EXT-FLEX にかけては接触面積比が有意に減少した. TMC 関節における FLEX 位を基準とし,EXT-FLEX, ABD-FLEX,FLEX-ADD でのオイラー角を用いた相対的な 屈曲,内転,外旋角度変化を Fig. 12 に示す.EXT-FLEX 間においては,わずかな外転および外旋運動が認められる が,屈曲角度が 21.2 ± 10.7°であり,3 軸の中では最大の角 度変化であった.ABD-FLEX-ADD 面では運動に伴い内転 運動だけではなく同程度の内旋運動が認められた.また, ABD-FLEX では屈曲伸展運動がほぼ認められない が, FLEX-ADD では約 10°の伸展運動が生じている. TMC 関節における FLEX 位を基準とし,EXT-FLEX, ABD-FLEX,FLEX-ADD でのオイラー角を用いた相対的な 屈曲,内転,外旋角度変化を Fig. 12 に示す.EXT-FLEX 間においては,わずかな外転および外旋運動が認められる が,屈曲角度が 21.2 ± 10.7°であり,3 軸の中では最大の角 度変化であった.ABD-FLEX-ADD 面では運動に伴い内転 運動だけではなく同程度の内旋運動が認められた.また, ABD-FLEX では屈曲伸展運動がほぼ認められない が, FLEX-ADD では約 10°の伸展運動が生じている. Fig. 13 に典型例として,被験者 8 名中 2 名(#1,#2)の TMC 関節骨表面における各肢位の 3 次元軟骨接触領域分 布を示す.赤色の領域が接触面を示す.また,Fig. 14(a)に は ABD-FLEX-ADD における接触領域図心点の平均位置を 示し,Fig. 14(b)に EXT-FLEX における接触領域図心点の平 均位置を示した. (b)
Fig. 10 (a) Relationship between the articular cartilage surface areas of the TMC joint and the thumb length, (b) Relationship between the articular cartilage surface areas of the TMC joint and the hand length
(a) 60 80 100 120 140 160 180 200 110 130 150 A r ti c u la r c a r ti la g e a r e a [ m m 2] Thumb length [mm] MCB TRZ ρ = –0.23 ρ = –0.12
Fig. 9 Average articular cartilage surface area of 4 positions for MCB and TRZ 0 20 40 60 80 100 120 140 160 180 200 MCB TRZ A r ti c u la r c a r ti la g e s u r fa c e a r e a [ m m 2] (a) (b)
Fig. 8 Bone adduction, flexion and pronation angle for the ABD, ADD, FLEX and EXT positions, (a) Comparison between ABD, FLEX and ADD, (b) Comparison between EXT and FLEX 60 80 100 120 140 160 180 200 170 180 190 200 A r ti c u la r c a r ti la g e a r e a [ m m 2] Hand length [mm] MCB TRZ ρ = 0.56 ρ = 0.16 -30 -15 0 15 30 45
ABD FLEX ADD
B o n e a n g le [ o] ADD/ABD FLEX/EXT SUPI/PRO
*
p < 0.05*
*
-30 -15 0 15 30 45 EXT FLEX B o n e a n g le [ o] ADD/ABD FLEX/EXT SUPI/PRO*
p < 0.05*
被験者ごとの接触領域図心点位置座標や肢位間の変位 量は被験者の骨の大きさやアスペクト比によって異なり, 単純比較はできないと考えられるため,各被験者ごとの骨 座標系構築時に取得した特徴点を用いて接触図心点位置を 基準化した後に平均化している.ABD から ADD への肢位 変化に伴い,TRZ 骨表面においては接触領域の図心点が Dorsal(背側)から Volar(掌側)へと骨の凹形状に沿って 移動した.このとき ABD - FLEX において,平均図心位置 の Dorsal - Volar 方向への変化を確認した. MCB において は大きな図心位置の変化はみられなかった.EXT-FLEX に おいては Radial(橈側)から Ulnar(尺側)へと MCB 骨表 面凹形状に沿って図心点の移動が確認された.TRZ 表面で は大きな変化はみられなかった. 4.考 察 Fig. 10 では TRZ 関節軟骨表面積は手長と正の相関があ り,母指長とは低い負の相関があることを示した.MCB と手長,母指長においてはいずれも相関がみられなかった. これまで著者らによる研究 6)では母指を構成する指節骨お よび中手骨遠位部関節軟骨表面積はすべて手長と高い正の 相関を示しており,本研究が対象としたMCB および TRZ においては異なる結果となった.本結果は指節骨によって 構成される関節軟骨表面積は手長に依存するが,手根骨に よって構成される関節はその限りではない可能性を示唆し ており,さらなる検討が必要である. Fig .11 に各肢位における関節軟骨接触面積比の結果よ り,EXT 位において最大接触面積を示した.今回設定した EXT 位は Pinching や Grasping をはじめとした日常生活動作 (Activity of daily life: ADL)時において頻出する動きに対 応した肢位となっている.著者らの以前の研究において母 指IP,MCP 関節に対して同様の手法を用いて接触動態を明 らかにしたが,それらの関節においても同様に高負荷がか かると考えられる肢位において最大接触面積となった.母 指を構成するいずれの関節においても,一般に関節に力が 作用するとされる ADL 肢位において最大接触面積となる 結果が得られたことは,母指を構成する各関節の形状は高 負荷時に関節に作用する力を相互に分散する能力を有して いると推測できる. EXT-FLEX 運動面は屈曲伸展運動を主とした運動面とし て評価した.Fig.14 の結果より,EXT-FLEX 運動時,MCB 表面上では骨の凹方向に沿った動きをしており,TRZ 骨表 面上ではほとんど動きがみられない.Fig. 12 の結果から EXT-FLEX 肢位間の関節角度変化は屈曲角度変化が最大でFig. 14 3D points of the average centroid of the cartilage contact area in the four positions
MPB
TRZ
EXT FLEX ABD ADD VOLAR DORSAL ULNAR RADIAL DORSAL VOLAR DORSAL DORSAL ULNAR RADIAL ULNAR
RADIAL RADIAL ULNAR
#1
#2
Fig. 13 Typical 3D distributions of the contact area on the cartilage of the TMC joint in two subjects
Fig. 12 Relative joint angle change for the movements from EXT to FLEX, ABD to FLEX and FLEX to ADD
-20 -10 0 10 20 30 40 ADD(+)/ABD(-) FLEX(+)/EXT(-) PRONATION(+)/SUPINATION(-)
EXT→FLEX ABD→FLEX FLEX→ADD
R o ta ti o n a l a n g le [ o ] (a) (b)
Fig. 11 Normalized articular cartilage contact area for the ABD, ADD, FLEX and EXT positions, (a) Comparison between ABD, FLEX and ADD, (b) Comparison between EXT and FLEX
*
0 20 40 60 80 100ABD FLEX ADD
C a r ti la g e c o n ta c t r a ti o [ % ]
*
p < 0.05 0 20 40 60 80 100 EXT FLEX C a r ti la g e c o n ta c t r a ti o [ % ]*
p < 0.05 MPB TRZEXT FLEX ABD ADD
VOLAR DORSAL DORSAL ULNAR RADIAL ULNAR RADIAL MPB TRZ
EXT FLEX ABD ADD
VOLAR DORSAL DORSAL ULNAR RADIAL ULNAR RADIAL 実験力学 Vol. 20, No. 1(2020 年 3 月)
あり,外転や外旋は屈曲変化に比して小さいことがわかる. 本研究を行う上で定義した骨座標系は皮膚表面を目視で捉 えた角度変化と対応が高く,関節角度変化が理解しやすい 座 標 系 を 構 築 し た と 言 え る . こ れ に 対 し て ABD-FLEX-ADD 面上の運動では,MCB 骨表面上はわずか な移動がみられるが,TRZ 表面上においては肢位変化に伴 いDorsal から Volar へ TRZ の凹形状に沿って移動している. また,図心点より,ABD-FLEX に比して FLEX-ADD の移 動が少ないことが読み取れる.ABD から FLEX においては 単純な内転運動を想定していたが,肢位変化に伴い中手骨 長軸周りの内旋が生じていることが認められた.FLEX か ら ADD に関しても単純内転を想定していたが,同様に内 旋が生じるだけでなく,10°程度の伸展角度変化も認められ た.ABD-ADD 運動面上で,ABD-FLEX においては手掌よ り外側で可動域が確保されているのに対し,FLEX-ADD で は手掌の影響により中手骨が Volar へと押し出されること が原因であり,多軸周りの運動を行うことが ABD-FLEX と FLEX-ADD 間で図心点移動量が異なることにも影響を与 えていると考えられる.TMC 関節は関節を構成する両骨が 鞍形状をしており,それぞれ凹方向に沿った関節運動では 接触領域が移動し,凸方向ではそれぞれの鞍点付近で移動 が生じていない.よって,TMC 関節は滑り運動を主体とし た関節である.しかしながら,単純な 2 軸回りの運動によ る滑りだけではなく,中手骨長軸方向周りの回転も生じて いることを考慮すべきである. D'Agostino ら7)は TMC 関節における OA 症状の悪化に伴 い,大菱形骨の Dorsal-Volar 方向において骨形状が平坦に なることを明らかにした.本研究の結果からも,同方向に おいては単純な滑りだけではなく 3 次元的な骨の回転運動 が含まれており,肢位に起因する関節に加わる力だけによ らない摩擦による影響があり,日常的な肢位変化において も極めて高い負荷が加わる部位であると推察される.TMC 関節は,あらゆる関節角度において高い形状的適合性を持 つわけではなく,高い自由度を持つために形状的適合は低 い関節であり,形状自体が関節症を引き起こすリスクとな り得ることを示唆している.これまで関節形態や OA と関 節形状の関連性評価のための有限要素モデルが開発9)-12)さ れているが,CT 画像を用いており,生体内における軟骨 形状や軟骨接触を直接考慮できていない.本研究の結果は 生体内での関節軟骨接触を直接測定しており,臨床的にも 重要な知見を与えるものと考えている. Marzke ら 13)はヒトを含めた現代の霊長類と霊長類化石 の TMC 関節面形状についてレーザースキャナを用いて 3 次元曲率で定量評価し,運動機能の違いについて述べてい る.関節可動域や手機能に対し,TMC 関節形状は大きな意 味を持つ.しかしながら本研究では,関節表面形状を定量 的に評価していないことから,3 次元軟骨表面形状の特徴 を考慮した関節接触動態の解析が今後の課題である. 5. 結 言 生体内における健常成人男性の母指TMC 関節の 4 肢位 における骨角度と軟骨接触面積をMR 画像と 3D モデルを 用いて解析し,以下のことを明らかにした.(1) TRZ 関節 軟骨表面積は手長と正の相関がある.MCB 関節軟骨表面積 と手長および母指長では,いずれも相関がない.(2) TMC
関節軟骨接触面積は EXT で最大となり,ADD, FLEX,
ABD では EXT に比べ有意に小さく,肢位間の差は少ない. (3) ABD-FLEX-ADD 肢位変化において,中手骨は内転運動 に加えて内旋運動と伸展運動の3 次元的な運動を示す.(4) 軟骨接触領域は MCB,TRZ いずれの骨表面上においても 凹形状方向に沿って大きく移動し,凸形状方向においては 移動が小さい.(5) TMC 関節は主に滑り運動を主体とした 関節であるが,中手骨長軸方向周りの回転も生じている. 参 考 文 献
1) Zancolli, E.A., Ziadenberg, C., and Zancolli, E. Jr.: Biomechanics of the trapeziometacarpal joint, Clin. Orthop. Relat. Res., 220 (1987), 14-26.
2) Momose, T., Nakatsuchi, Y. and Saitoh, S: Contact area of the trapeziometacarpal joint, J. Hand Surg. Am., 24-3 (1999), 491-495. 3) Koff, M.F., Shrivastava, N., Gardner, TR., Rosenwasser, M.P., Mow, V.C. and Strauch, R.J.: An in vitro analysis of ligament reconstruction or extension osteotomy on trapeziometacarpal joint stability and contact area, J. Hand Surg. Am., 31-3 (2006), 429-439.
4) Ateshian, G.A., Ark, J.W., Rosenwasser, M.P., Pawluk, R.J., Soslowsky, L.J. and Mow, V.C.: Contact areas in the thumb carpometacarpal joint, J. Orthop. Res., 13-3 (1995), 450-458. 5) Chenoweth, B.A., O’Mahony, G.D., Fitzgerald, C., Stoner, J.A.,
O’Donoghue, D.L. and Rayan, G.M.: Efficacy of dorsoradial capsulodesis for trapeziometacarpal joint instability: A cadaver study., J. Hand Surg. Am., 42-1 (2017), e25-e31.
6) Kawano, Y., Nakamura, T., Tada, M., Nagura, T., Matsumoto, M., Nakamura, M. and Sato, K.: Influence of the trapeziometacarpal joint fusion on thumb muscles and thumb-tip movement: A cadaveric study., Clin Biomech., 67 (2019), 8-14.
7) D'Agostino, P., Dourthe, B., Kerkhof, F., Van, Lenthe, G.H., Stockmans, F. and Vereecke, E.E.: In vivo biomechanical behavior of the Trapeziometacarpal joint in healthy and osteoarthritic subjects, Clin. Biomech., 49 (2017), 119-127.
8) Morise, Y., Sakamoto, M., Sugita, K., Kazama, K., Kobayashi, K. and Tanabe, Y.: Analysis of in vivo static contact surface motion of thumb interphalangeal joint, Advanced Experimental Mechanics, 3 (2018), 209-214.
9) Dourthe, B., D’Agostino, P., Stockmans, F., Kerkhof, F. and Vereecke, E.: In vivo contact biomechanics in the trapeziometacarpal joint using finite deformation biphasic theory and mathematical modelling, Med. Eng. Phys., 38-2 (2016), 108-114.
10) Lalone, E.A., Willing, R.T., Shannon, H.L., King, G.J. and Johnson, J.A.: Accuracy assessment of 3D bone reconstructions using CT: an intro comparison, Med. Eng. Phys., 37-8 (2015), 729-738. 11) Su, F.C., Lin, C.J., Wang, C.K., Chen, G.P., Sun, Y.N., Chuang,
A.K. and Kuo, L.C.: In vivo analysis of tapeziometacarpal joint arthrokinematics during multi-directional thumb motions, Clin. Biomech., 29-9 (2014), 1009-1015.
12) Halilaj, E., Laidlaw, D.H., Moore, D.C. and Crisco, J.J.: Polar histograms of curvature for quantifying skeletal joint shape and congruence, J. Biomech. Eng., 136-9 (2014), 0945031-0945036. 13) Marzke, M.W., Tocheri, M.W., Steinberg, B., Femiani, J.D., Reece,
S.P., Linscheid, R.L., Orr, C.M. and Marzke, R.F.: Comparative 3D quantitative analyses of trapeziometacarpal joint surface curvatures among living catarrhines and fossil hominins, Am. J. Phys. Anthropol., 141-1 (2010), 38-51.
進入車両停止装置(自動車用λ型強制制動体)における
制動機構の検討および制動性能評価
—アーム形状および長さが制動性能に与える影響—
西 村 尚 哉
*,杉 浦 捷 太 郎
**,深 津 椋 平
**Braking Mechanism and Performance Evaluation of
the λ-type Enforcement Braking Device for automobile
—The effect of an arm-shape and -length on the braking performance—
Naoya NISHIMURA, Shotaro SUGIURA and Ryohei FUKATSU
The λ type enforcement braking device (EBD) is a kind of an equipment designed to halt a vehicle, and in turn, prevent a potential traffic accident. The employment of EBD may considerably increase the safety protection of drivers and workers in any road construction region. For the performance improvement of EBD on the collision safety and reliability, it is necessary to evaluate the braking characteristics and optimize the structure of the device. This paper concerns the influence of the ‘arm’ which is an important EBD component on the device’s performance. In particular, the effect of the arm-shape and -length on braking characteristics is investigated by model collision test and respective theoretical calculations. The collisions with three different velocities were carried out using model of automobile and EBD with straight and bend arm shape. A general analysis of a braking distance was derived based on the conservation energy principle. In the model collision test, both straight and bend arm EBD brought us to the same braking distance result, which suggests the negligible effect of the arm shape on the braking. The output of our research was in good agreement with theoretical results. This paper demonstrates the theoretical prediction of the pertinent parameters of a collision behavior. Furthermore, the use of the long arm in the λ type EBD is effective for the shortening of the braking distance, given a proper arm structure optimization. This approach allows us to carry out the braking independent of an automobile driving system.
Keywords: Enforcement braking device, Collision safety, Road construction region, Simple model collision test,
Braking distance, Structural optimization 1.緒 論 今日,高速道路等において,車線規制中の道路工事現場 に車両が誤って進入してしまうといった事故が多発してい る1),2),3).作業員の安全確保を目的とした,誤進入車両を安 全かつ強制的に制動させる衝突安全対策が望まれている. 現在,自動車用強制制動体がいくつかある中で,ギリシャ 文字のλ型をした強制制動体(以下,λ型制動体と記述す る)が,侵入防止,車線変更案内に加え,誤進入車両を強 制的に制動,停止させる装置として,工事開始位置に設置 されている.このλ型制動体は,底部に摩擦部材が取り付 けられており,その摩擦部材と路面との接地面摩擦による 制動仕事により,車両の運動エネルギーを吸収し,強制停 止させるものである.実際の工事現場での設置状況をみる と,案内器具としてのみの使用やλ型制動体傍での作業が 見られ,設置,使用する作業者に対し本来の使用方法等の 周知が不十分といった問題もある.λ型制動体に関する研 究は少なく 4),5),工事現場の安全確保,利用拡大のために も,更なる制動性能の向上,最適な制動体構造の検討が必 要である. 本研究では,λ型制動体の制動性能向上に繋がるよう, 最適な制動体構造を検討し,性能評価の実施による効果の 検証を目的とする.制動体構造の最初の検討部品として, λ型制動体の構成部品の一つであるアームに着目した.既 存のλ型制動体のアームは折れ曲り形状をしており,スト レート形状のアームを有するλ型制動体との比較により, アーム形状が制動性能に与える影響について検討,評価を 試みた.さらに,対応可能車両の拡大として,車両が全て 乗り上がる,長いアームを有する制動体との比較により, アーム長さが制動性能に与える影響について評価を試み, 制動距離の短縮,長いアーム利用の有効性を検討した.λ 型制動体模型および車両模型を用いた衝突実験による制動 性能評価を実施するとともに,エネルギー保存則により理 論的に推定した制動距離と比較評価した. 2.模型による衝突実験 2.1 自動車用λ型強制制動体の制動挙動 自動車用強制制動体としては,大別すると,クッション ドラム6) やエイトガード7) といった,変形により衝突時の 衝撃を吸収,軽減する制動体と,λ型制動体8) やデルタク 原稿受付 2019 年 12 月 12 日 * 名城大学理工学部(〒468-8502 愛知県名古屋市天白区塩 釜口1-501) ** 名城大学大学院理工学研究科(〒468-8502 愛知県名古屋 市天白区塩釜口1-501)