[No.12-79]日本機械学会 第 19 回鉄道技術連合シンポジウム講演論文集[2012-12.5~7.東京]
<3416> 直流電気鉄道の省電力運転のための
ブレーキ力制御と運転支援の提案
学[電]〇楊 哲 (東京大) 学[電] 渡邉 翔一郎 (東京大)
正[電] 古関 隆章 (東京大) 正[電] 水間 毅 (交通安全環境研究所)
非[機] 濱崎 康宏 (新京成電鉄)
Proposal of train operation assistance for energy saving of DC-electrified trains
Zhe YANG*, Shoichiro WATANABE, Takafumi KOSEKI , Univ. of TokyoTakeshi MIZUMA, National Traffic Safety and Environment Laboratory Yasuhiro HAMAZAKI, Shin-Keisei Electric Railway Co., Ltd.
This paper presents a manual train control assistance method for braking power-limiting energy-saving train operation. Braking assistance command would be generated from a “dictionary” prepared in advance to improve the regenerative braking availability, together with a safe and timekeeping stopping. The parameters of the proposed mechanism are discussed, and the energy saving effect is examined in a simulation.
Keywords : energy saving, DC-electrified train, operation assistance
1.はじめに パワーエレクトロニクス技術の進歩により、1968 年に 回生ブレーキ車が初めて量産化(1)し、現在では、回生ブ レーキ車が電車全体の 75.7%を占めている(2)。回生ブレ ーキを活用することで、回生電力の有効活用による省エ ネルギー効果・機械ブレーキの使用を抑えることによる 部品摩耗の低減・電車操作性能の向上による乗り心地の 改善などを図っている。 しかしながら、架線電圧が極めて高い場合や付近に回 生電力を消費する電車がいない場合では、回生失効や回 生絞込みが発生し、回生ブレーキを有効に利用すること ができない。これに対し、近年では、図 1 に示すように、 回生電力を吸収する機能を持つ変電所の設置、車上や地 上に、二次電池、二重層キャパシタ、フライホイールな どの電力貯蔵装置の導入が検討されている。一方、新た な設備を設置しなくても、運転方法を工夫し、大きな回 生電力を出すことを防げれば、回生機能を有効に利用す ることが可能となる。
Fig. 1 Application of regenerative brake
電車の運転方法として、筆者らは省エネルギーに適す 最大制動パワー制限ブレーキパターンを提案した(3)。そ の後の研究グループの中での議論と検討を通じ、運転へ の適用に必要な具体的支援とデータ作成の考え方を導入 した。本稿では、運転の安全と駅間走行時分の正確さを 保ち、リアルタイム情報に基づき速やかに具体的操作方 法を決め、且つ運転士に提示する運転支援方法を紹介す る。 2.回生ブレーキの活用 2.1 パワー制限ブレーキ
Fig. 2 Braking force recorded in experiment in March 2012 回生ブレーキとは、電車の制動の時に電動機を発電機 として使い、電車の運動エネルギーを電力に変換して饋 電線に返却するブレーキである。ただし、図 2 のように、 0 5 0 2 4 6 60 80 100 No tc h A ss istanc e B rake Co m m an d B rake Fee d b ac k Time (s)
Brake Command Brake Feedback Notch Assistance
回生車が返却しようとする電力が大きく近傍に十分な負 荷の無い場合、饋電線の電圧が高くなり、車両の主回路 制御装置が電力変換装置を保護するため、回生ブレーキ の絞込みを行い、エネルギー回収効果が低くなってしま う。高速走行時に大きな回生電力の発生を回避すれば、 回生失効や回生絞込みを抑え、回生ブレーキを有効活用 することが出来る。 このような考えに基づき提案する「パワー制限ブレー キパターン」(3)を図 3 に示す。実線は従来しばしば用い られてきた「最大ブレーキパターン」で、速度に関わら ず最大ブレーキ力を出すことができる。このパターンを 応用すると、電車を短時間短距離で止めることができ、 操作も簡単なため、広く使われてきた。破線は「パワー 制限ブレーキパターン」で、低速域で最大ブレーキ力を 出す一方で、電動機/発電機性能に合わせ高速域で速度 の二乗に反比例し低下する。すなわちこれにより、電動 機の弱め界磁領域(高速域)での機械ブレーキ使用を抑 制できる。点線は「離散化パワー制限ブレーキパターン」 で、最大ブレーキ力を N 等分し、パワー制限パターンの 内側に合わせた階段状のブレーキパターンとなっている。 ある速度範囲で一定な制動力指令を出すため、適切な支 援があれば、運転士が実行できるブレーキパターンと考 えられる。この(離散化)パワー制限ブレーキパターン において𝑣0は制動力を低下させ始める速度で、図 4 に示 すように、𝑣0を小さくすれば「制限」が強くなり、パワ ー最大値𝑃𝑚𝑎𝑥= 𝐹𝑚𝑎𝑥× 𝑣0が小さくなる。その逆、𝑣0を大 きくすれば「制限」が弱くなり、最大パワーが大きくな りる。従って、𝑣0を小さくし、弱いブレーキをかければ、 大きな電力を出すことを避け、回生失効や回生絞込みを 低減することができる。このようにしても周囲状況が悪 くき線電圧が上昇する時に回生絞込みを完全に回避する ことはできないが、周辺の電車との細かい情報交換がで きない一般的な条件において、回生制動の最大活用を可 能とする方法である。
Fig. 3 Power limited brake
Fig. 4 Regenerative power output
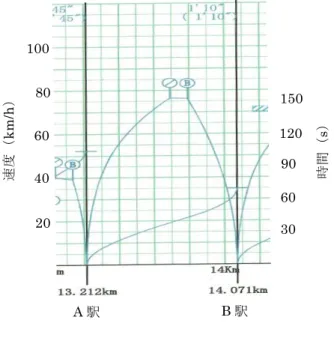
電車の運転においては、安全性と定時性が最優先であ る。先述の省エネルギーを実現するため𝑣0を小さくし弱 いブレーキをかけると、制動距離と制動時間が伸び、オ ーバーランもしくは到着遅れの恐れが出る。従って、以 下では、安全性と定時性を守りながらどのように省エネ ルギー効果を最大限引き出すかを考える。 2.2 緩いブレーキの制約 図 5 のような一般的な基準運転曲線を考える。電車が A 駅から発車し、13.70km のところに目標速度を達成し 惰行に入る。13.80km から制動し、B 駅に停止する。
Fig. 5 Run curve
本例の区間の基準運転時分は 1 分 10 秒であるが、これ は電車の最低性能で走ると想定した運転時分である。饋 電線電圧が極めて低い場合を除けば、電車はより早く走 ることができる。以前のある現車実験の結果によると、 基準運転時分が 100 秒の区間での実際の運転時分は 90 秒だった。そのため、運転時分を守る前提で、基準運転 曲線より早く走った余裕時間を、省エネルギー運転に利 用することが考えられる。 従来、電車が次駅にオーバーランしないために、惰行 距離を縮め、早めに比較的強いブレーキに入るのが一般 的であった。これに対し図 3、図 4 で提唱したパワー制 限ブレーキでは高速で早めに緩いブレーキ動作に入り、 その後徐々にブレーキ力を増してゆく。制動にかける時 間が増えるが、走行の前半に時間余裕があれば全体の走 行時分を守ることができる。 以上のように、基準運転より余った時間余裕を生かす 緩いブレーキは、安全性、定時性、省エネルギー効果の 間にバランスを取る、エコ的な電車運転手段である。 3.運転支援提案 2.1 に論じたパワー制限ブレーキは電車速度により制 動力が違い従来より操作が難しいため、運転士に対する 支援が重要である。また、有人運転の支援に基づき、将 来 ATO が搭載した車両に直接に電車をコントロールす ることも可能である。以下は、支援運転を構成する三つ の部分、電車の運転情報の収集、支援意思の決定、ブレ 0 2 4 6 8 10 20 30 40 50 60 70 80 90 M ax r e ge n e rativ e p o we r (M W) vo (km/h)
Max power limited by v0 Max power by motors
A 駅 B 駅 20 40 60 80 100 速 度 ( k m /h ) 30 60 90 120 150 時 間 ( s)
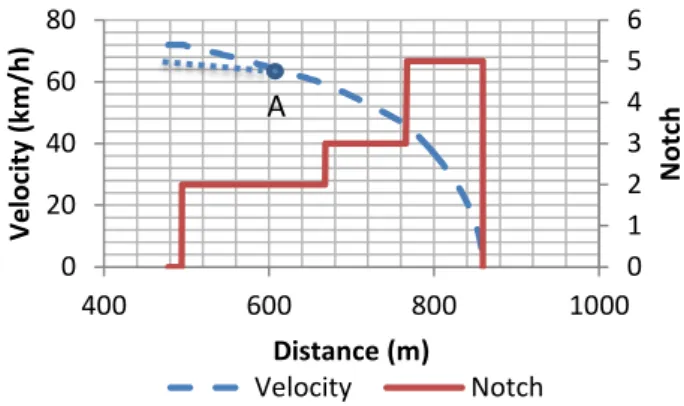
ーキの操作支援を紹介する。 3.1 運転情報の収集 運転情報の収集とは、電車の速度、位置、走行時間、 き線電流電圧などの情報を収集することである。これら の情報に基づき、採用すべきブレーキパターンを決定す ることを、ブレーキパターンの修正や、及び省エネルギ ー効果を可視化するために利用する。本研究における現 車試験では、GPS による電車速度、位置のデータ収集を はじめ、車上搭載の記録装置からデータをリアルタイム に読み取った。速度、位置情報以外にも、ブレーキ指令、 電気ブレーキ出力、き線電圧、き線電流、応荷重など、 電車の走行状態を反映する様々な情報を収集することで、 異なる状況での運転支援効果を全面的に分析することが 可能となる。 支援システムの意思決定に有効な情報とは、電車の将 来の運転状態を比較的正確に推測し、かつブレーキ動作 に入る前に収集できる情報である。したがって、ブレー キ動作以前の力行、或いは惰行の二つ運転状態の中では、 架線電圧の影響を受けない惰行時に意思決定を行うほう が好ましい。 3.2 支援意思の決定 本稿の支援意思の決定とは、既に収集した電車の走行 情報に基づき、基準運転時分以内で駅に到着し、かつオ ーバーランなしに停止するとの前提で、最も緩いブレー キパターンを決定することである。 リアルタイム意思決定なので、できるだけ計算時間と 計算量が少ないアルゴリズムが要求される。筆者の提案 は、リアルタイムにシミュレーションではなく、オフラ インであらゆる可能な状況に対し対応すべきブレーキパ ターンを用意し、容易に検索できる「辞書」として、支 援開始点における通過速度と残り時間を index とするテ ーブルを用意することで、運転支援を行う時に電車の走 行状態をこの辞書から選択し、適切なブレーキパターン を速やかに見つけること。 理論的には、惰行状態におけるあらゆる位置、あらゆ る速度、あらゆる残り時間をカバーする辞書を用意し、 各ケースにおける最も緩いブレーキの制動パターンを収 録すればよい。ただし、ここに注意を払うべきなのは、 データベースのサイズである。リアルタイム支援にはデ ータの通信速度を確保する必要があるため、あまり大き なデータベースでは検索時間も通信時間も長くなり、リ アルタイム支援ができない恐れがある。従って、電車の 走行状態を全面的にカバーしつつ、適切に小さな辞書を 準備することが鍵となる。 そこで支援開始位置を固定する。すなわち支援開始位 置を複数の既定値にし、電車がその位置を通過する時の 速度と残り時間から、最も緩いブレーキパターンを選択 する。この方法の優位点は、事前に容易に予測できる電 車の惰行区間に支援開始位置を設ければ、電車がその点 を惰行で通過することがほぼ確実になることである。ま た、過去の現車実験でわかった多様な運転状況に柔軟に 対応するため、支援開始位置を複数設ける。電車の加速 性能が優れ予定より早く加速終了した場合に、早い段階 で支援運転に入ることができ、より多くの残り時間を活 かして緩いブレーキパターンを選択する。一方、電車が 何らかの原因で速度を低下させ余裕時間が少なくなった 場合、次の支援開始点で新たな情報に基づく支援ブレー キパターンを更新すれば、到着時分を守ることができる。 各𝑣0に適するブレーキパターンを作るには、決められ たブレーキ出力に従って、次駅から制動曲線を逆引きし、 支援開始点での通過速度まで支援運転曲線を作成しても よいが、異なる通過速度に該当する支援指令の違いは制 動開始点の位置だけなので、それらの支援指令をすべて に収録することは冗長となる。そこで、支援開始点の各 通過速度に合わせて支援指令を用意するのではなく、図 6 のように、支援開始点での想定した最大速度まで制動 曲線(破線)と支援指令(実線)を用意し、実際の電車 運転曲線(点線)を監視しながら、支援曲線(破線)と ぶつかる点(A 点)から支援指令(実線)をアクティブ にすれば、同じ𝑣0に該当するすべての通過速度を一つの 制動支援軌道データで対応できる。 これにより、辞書とデータベースのサイズを抑えなが ら必要な支援情報をカバーし、リアルタイムの支援意思 決定が可能となる。
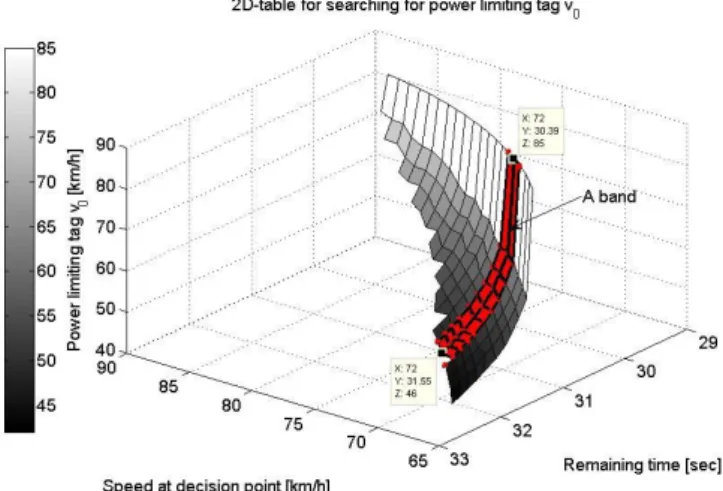
Fig. 6 Application of brake pattern 3.3 ブレーキの操作支援 本稿におけるブレーキの操作支援とは、決定したブレ ーキパターンを運転士に伝達することである。運転士に 指令に円滑に従ってもらうためには、指令の種類ができ るだけ単一で、操作が簡単で、かつ連続する二つの指令 の間に時間の余裕を十分に考慮することが重要である。 そこで、運転台に 10 インチの汎用携帯端末の液晶モニタ を設置し、その画面にノッチ指令を数字と扇形の図で同 時に出すとともに、スピーカを設置し、雑音があっても 聞き取りやすい女性の音声でノッチ指令を読み上げるこ とにした。ノッチ指令は運転士の習慣を考慮し、通常の ノッチ操作範囲内の三つに絞った。さらに、保安のため に、支援指令の最大ブレーキ力を実際の最大ブレーキ力 の 5/7 程度にし、支援指令で止まれない場合のより強い 制動を可能とした。 4.ケーススタディとシミュレーション ケーススタディとして、図 5 の区間の基準運転曲線の 力行終了点を支援開始位置とし、電車がそこを通過する 時の速度と残り時間に基づき、最も弱いブレーキを提示 する𝑣0を計算する。その結果が図 7 に示す。図 7 は、電 車が支援開始位置を通過する速度を x 軸、残り時間を y 軸に、二次元のテーブルを用意し、その上に各(x, y)に適 用する一番小さな𝑣0を z 軸プロットした「辞書」である。 x 軸(速度)の幅は、基準運転曲線の速度±10km/h の範 囲に設定し、電車が支援開始位置での通過速度の可能な 範囲とする。「A band」と表示された部分は、ある通過速 0 1 2 3 4 5 6 0 20 40 60 80 400 600 800 1000 N o tc h Veloc ity (k m /h ) Distance (m) Velocity Notch
A
度に異なる残り時間が与えられた場合に、採用可能な一 番小さな𝑣0であり、上の辺では残り時間が少なく大きい 𝑣0を、下の辺では残り時間に余裕があり小さい𝑣0を採用 する。もしも残り時間が上の辺より少なければ、ぎりぎ りまで惰行し最大ブレーキをかけたとしても駅間走行時 分を守ることはできず遅延を生じてしまう。一方、残り 時間が下の辺より多かったとしても、保安上の理由から 𝑣0を下げたより緩いブレーキ操作は行わない。 上記の二次元のテーブルにあるすべての𝑣0に対して、 電車が支援開始位置から停車駅まで、𝑣0に一意に対応し た出力のパターンに基づき、図 8 のように次駅から逆引 き計算をし、ブレーキ開始位置と各ブレーキノッチの入 れる位置とを求め、支援操作パターンを用意する。電車 の速度が支援速度より低い時にはまず惰行指令を出して おき、図 6 の A 点で示した通り電車速度が支援速度と一 致した時に支援指令をアクティブにする。
Fig. 7 2D-table for searching for power limiting tag
Fig. 8 Braking command and velocity 以上のように𝑣0を探す二次元の「辞書」と該当のブレ ーキパターンを含めた𝑣0による一次元データベースを独 立に用意すれば、実際電車が支援開始位置を通過する時 の状態に基づき、リアルタイムに適切なブレーキ指令を 出すことが可能となる。動作確認のため、このデータベ ースを交通安全環境研究所が開発した運転支援システム に実装し、現車試験で記録された走行データを用いてそ の動作を模擬検証した。その一部の結果を図 9 に示す。 図 9 に、12150m から発車した電車(青線、B)が、基 準運転曲線(赤線、A)より高い加速度で力行し、支援 開始位置(黄緑点)の前に惰行に入る。支援開始位置を 通過する速度 72km/h は基準速度 76km/h よりやや低いが、 その差が図 7 の辞書にカバーされるので支障が生じない。 基 準 運 転 曲 線 よ り 速 く 走 っ て 稼 い た 時 間 か ら𝑣0= 46km/h が適切なパワー制限速度だと辞書から判断し、支 援システムが𝑣0= 46km/h に該当する支援運転曲線(緑 線、C)を提示する。その運転支援曲線をもとに、電車 の位置に基づき運転士に適切な指令が送られ、既定の緩 いブレーキパターンのもとに運転士のノッチ操作を支援 する。また、図 4 によると𝑣0= 46km/h の時の最大回生 電力は約 3.7MW で、電動機の最大パワー6.57MW を大き く下回るので、C 線に従って運転すれば回生失効や回生 絞込みを有効に抑えることが可能となる。 この実走行データを用いたシミュレーションを通じ、 本稿で提案している辞書・ブレーキパターンというデー タベースを利用し、余裕時間を生かしリアルタイムで適 切な緩いブレーキパターンを提示することが可能なこと が確認された。実際の支援における、多様な線路状況、 運転士の操作、電圧の変動、回生電力量の変化に関する 考察を、2012 年 10 月の現車実験で行う。
Fig. 9 Simulation with recorded run curve 5.まとめ 以上が、電車の省エネルギー運転のためのブレーキ出 力制御とリアルタイムの運転支援方法を提案した。これ を通じ回生失効や回生絞込みを低減し、回生ブレーキを より活用することができる。 今後は、本提案に基づき、支援データを現車システム に実装し、実際の路線で実験を行うことにより、提案手 法の性能と効果の検証を進めていく予定である。 なお、本研究は鉄道建設・運輸設備整備支援機構の「運 転分野における基礎的な研究推進制度」採択研究課題と して実施されたものである。同機構、交通安全環境研究 所、新京成電鉄、セントラルエンジニアリングの関係者 各位、および有益なご指導をいただいた千葉大学近藤圭 一郎先生に謝意を表する。 参考文献 1) 電気車研究会「鉄道ピクトリアル」1999 年 2 月号、 No. 665, P. 48-53 2) 日本民営鉄道協会、環境パンフレット「環境と鉄道」、 2008. 10 3) 古関隆章ら:直流電気鉄道回生エネルギー有効活用 のための運転支援と高度なブレーキ力制御、電気学 会研究会資料、pp59-64、2012. 07 0 1 2 3 4 5 6 0 20 40 60 80 400 600 800 N o tc h Veloc ity (k m /h ) Distance (m) Velocity Notch V el oc it y (k m /h ) Distance 20 40 60 80 0 A、基準計画 B、実績 C、支援
TER-13-006 PHS-13-010 1/6
回生有効活用で省エネルギーを図るブレーキ制御と
その支援の実証研究
楊 哲* 渡邉 翔一郎 古関 隆章 (東京大学)
水間 毅 (交通環境安全研究所)
濱崎 康宏 (新京成電鉄)
Theoretical and Experimental Studies on Braking Assistance for Energy-saving Train Operation with Effective Usage of Regenerative Brake
Zhe YANG*, Shoichiro WATANABE, Takafumi KOSEKI (University of Tokyo)
Takeshi MIZUMA, National Traffic Safety and Environment Laboratory Yasuhiro HAMAZAKI, Shin-Keisei Electric Railway Co., Ltd.
Regeneration cancelling limits the energy saving effect of regenerative brake. To solve this problem, this paper presents a manual train control assistance method for braking power-limiting train operation. An experimental driving with assistant system based on this theory is carried out on a real train, whose result shows an improved energy recycling ratio with time-keeping driving.
キーワード:直流電気鉄道,省エネルギー,回生ブレーキ,回生失効,運転支援,基準運転時分
(DC electric railway, Energy saving, Regenerative brake, Regeneration cancellation, Driving assistance, Regular running time) 1. はじめに パワーエレクトロニクス技術の進歩により、1968 年に回 生ブレーキ車が初めて量産化(1)し、現在では、回生ブレーキ 車が電車全体の 75.7%を占めている(2)。回生ブレーキを活用 することで、(1) 回生電力の有効活用による省エネルギー効 果 (2) 機械ブレーキの使用を抑えることによる部品摩耗の 低減 (3) 電車操作性能の向上による乗り心地の改善などを 図っている。 しかしながら、架線電圧が極めて高い場合や付近に回生 電力を消費する電車がいない場合では、回生失効や回生絞 込みが発生し、回生ブレーキを有効に利用することができ ない。これに対し、近年では、回生電力を吸収する機能を 持つ変電所の設置、車上や地上に、二次電池、二重層キャ パシタ、フライホイールなどの電力貯蔵装置の導入が検討 されている。一方、新たな設備を設置しなくても、運転方 法を工夫し、大きな回生電力を出すことを防げれば、回生 機能を有効に利用することが可能となる。 電車の運転方法として、筆者らは省エネルギーに適す最 大制動パワー制限ブレーキパターンを提案し、運転への適 用に必要な具体的支援とデータ作成の考え方を導入した(3)。 本稿では、その提案に基づいた現車実験を行い、実験成果 から支援の有効性を実証する。 2. ブレーキ力制御と運転支援 〈2・1〉 回生ブレーキの活用のためのブレーキ力制御 回生ブレーキとは、電車の制動の時に電動機を発電機と して使い、電車の運動エネルギーを電力に変換して饋電線 に返却するブレーキである。ただし、回生車が返却しよう とする電力が大きく近傍に十分な負荷の無い場合、饋電線 の電圧が高くなり、車両の主回路制御装置が電力変換装置 を保護するため、回生ブレーキの絞込みを行い、エネルギ ー回収効果が低くなってしまう。高速走行時に大きな回生 電力の発生を回避すれば、回生失効や回生絞込みを抑え、 回生ブレーキを有効活用することができる。 このような考えに基づいて提案する「パワー制限ブレー キパターン」(3)を Fig. 1 に示す。実線は従来しばしば用いら れてきた「最大ブレーキパターン」で、速度に関わらず最 大ブレーキ力を出すことができる。破線は「パワー制限ブ レーキパターン」で、低速域で最大ブレーキ力を出す一方 で、電動機/発電機性能に合わせ高速域で速度の二乗に反 比例し低下する。すなわちこれにより、電動機の弱め界磁 領域(高速域)での機械ブレーキ使用を抑制できる。点線 は「離散化パワー制限ブレーキパターン」で、最大ブレー キ力を N 等分し、パワー制限パターンの内側に合わせた階 段状のブレーキパターンとなっている。ある速度範囲で一 定な制動力指令を出すため、適切な支援があれば、運転士 が実行できるブレーキパターンと考えられる。この(離散 化)パワー制限ブレーキパターンにおいて𝑣0は制動力を低 下させ始める速度で、𝑣0を小さくすれば「制限」が強くな り、パワー最大値𝑃𝑚𝑎𝑥= 𝐹𝑚𝑎𝑥× 𝑣0が小さくなる。その逆、
2/6 𝑣0を大きくすれば「制限」が弱くなり、最大パワーが大き くなる。従って、𝑣0を小さくし、弱いブレーキをかければ、 大きな電力を出すことを避け、回生失効や回生絞込みを低 減することができる。このようにしても周囲状況が悪くき 線電圧が上昇する時に回生絞込みを完全に回避することは できないが、周辺の電車との細かい情報交換ができない一 般的な条件において、回生制動の最大活用を可能とする方 法である。 図 1 パワー制限ブレーキパターン Fig. 1. Brake pattern with limited power
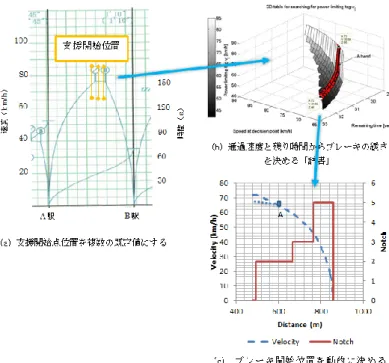
先述の省エネルギーを実現するため𝑣0を小さくし弱いブ レーキをかけると、制動距離と制動時間が伸びる問題があ る。ただし、列車運転に守る必要がある基準運転時分は、 列車の最低性能で走ると想定したものであるため、一般的 に列車はこれより早く走ることができる。そのため、惰行 距離を縮め、早めに緩いブレーキ動作に入っても、走行の 前半に時間余裕があれば全体の走行時分を守ることができ る。 〈2・2〉 運転支援の提案 〈2.1〉に論じたパワー制限ブレーキは電車速度により制 動力が違い従来より操作が難しく、また運転余裕時間によ ってブレーキのかけ方が違うため、運転士に対する適切な 支援が重要である。 運転支援は、電車運転情報の収集、支援意思の決定、ブ レーキの操作支援という三つのステップから組み合わせて いる。 (1) 運転情報の収集 運転支援は情報の収集から始まる。運転情報の収集とは、 電車の速度、位置、走行時間、架線電圧、回生電流などの 情報を収集することである。その手段としては、GPS、車 上搭載の記録装置、地上子などの方式がある。GPS の場合 では電車速度、位置など簡単な情報が得られる。一方、車 上記録装置の場合では列車の制御系統まで触れるのができ るため、運転士の操作指令、モータ電流・トルク、架線電 圧、回生電流、応荷重など、電車の走行状態を反映するな ど様々な情報を収集することができる。 支援システムの意思決定に有効な情報とは、電車の将来 の運転状態を比較的正確に推測し、かつブレーキ動作に入 る前に収集できる情報である。したがって、ブレーキ動作 以前の力行、或いは惰行の二つ運転状態の中では、架線電 圧の影響を受けない惰行時に意思決定を行うほうが好まし い。 (2) 支援意思の決定 運転情報の収集がおわった後は、運転支援が支援意思の 決定に移行する。支援意思の決定とは、既に収集した電車 の走行情報に基づき、基準運転時分以内で駅に到着し、か つオーバーランなしに停止するとの前提で、最も緩いブレ ーキパターンを決定することである。 リアルタイムの支援意思決定では、できるだけ計算時間 が少ないアルゴリズムが必要である。これに対して筆者ら の提案は、リアルタイムにブレーキパターンを計算するの ではなく、オフラインであらゆる可能な状況に対し対応す べきブレーキパターンを用意し、支援開始点における通過 速度と残り時間を index として「辞書」を作る。そして、 運転支援を行う時に電車の走行状態に応じた適切なブレー キパターンを辞書から速やかに選択する。 理論的には、惰行状態におけるあらゆる位置、あらゆる 速度、あらゆる残り時間をカバーする辞書を用意し、各ケ ースにおける最も緩いブレーキの制動パターンを収録すれ ばよいのだが、もう一つ考慮すべきことは、データベース のサイズである。リアルタイム支援でデータの通信速度を 確保する必要があるため、あまり大きなデータベースでは 検索時間も通信時間も長くなり、リアルタイム支援に支障 が生じる恐れがある。従って、電車の走行状態を全面的に カバーしつつ、適切な大きさの辞書を準備することが鍵と なる。 そこで支援開始位置を固定する。すなわち支援開始位置 をFig. 2 (a) に示すように複数の既定値にし、電車がその位 置を通過する時の速度と残り時間から、最も緩いブレーキ パターンを選択する。この方法の優位点は、事前に容易に 予測できる電車の惰行区間に支援開始位置を設ければ、電 車がその点を惰行で通過することがほぼ確実になることで ある。また、過去の現車実験でわかった多様な運転状況に 柔軟に対応するため、支援開始位置を複数設けることで、 電車の加速性能が優れて予定より早く加速終了した場合 に、早い段階で支援運転に入ることができ、より多くの残 り時間を活かして緩いブレーキパターンを選択することが できる。一方、何らかの原因で列車の速度が低下し、余裕 時間が少なくなった場合でも、次の支援開始点で新たな情 報に基づき支援ブレーキパターンを更新すれば、到着時分 を守ることができる。 電車が決めておいた支援開始点を通過する時の速度と残 り時間から、最も緩いブレーキ、つまり𝑣0を検索する辞書 をFig. 2 (b) に示す。Fig. 2 (b) は、電車が支援開始位置を 通過する速度をx 軸、残り時間を y 軸に展開して二次元の テーブルを用意し、その上に各(x, y) に適用する一番小さな 𝑣0を z 軸にプロットした「辞書」である。速度の展開範囲 は基準運転速度±10km/h に設定し、運転士個人操作による 速度差異をカバーする。「A band」と表示された部分は、あ る通過速度に異なる残り時間が与えられた場合に、採用可
3/6 能な一番小さな𝑣0であり、上の辺では残り時間が少なく大 きい𝑣0を、下の辺では残り時間に余裕があり小さい𝑣0を採 用する。もしも残り時間が上の辺より少なければ、ぎりぎ りまで惰行して最大ブレーキをかけたとしても駅間走行時 分を守ることはできず遅延を生じてしまう。一方、残り時 間が下の辺より多かったとしても、保安上の理由から𝑣0を 下げるより緩いブレーキ操作は行わない。 各𝑣0に適するブレーキパターンを作るには、決められた ブレーキ出力に従って、次駅から制動曲線を逆引きし、支 援開始点での通過速度まで支援運転曲線を作成してもよい が、異なる通過速度に該当する支援指令の違いは制動開始 点の位置だけなので、それらの支援指令をすべてに収録す ることは冗長となる。そこで、支援開始点の各通過速度に 合わせて支援指令を用意するのではなく、Fig. 2 (c) のよう に、支援開始点での想定した最大速度まで制動曲線(破線) と支援指令(実線)を用意し、実際の電車運転曲線(点線) を監視しながら、支援曲線(破線)とぶつかる点(A 点) から支援指令(実線)をアクティブにすれば、同じ𝑣0に該 当するすべての通過速度を一つの制動支援軌道データで対 応できる。支援指令をアクティブしてから、指令曲線が平 らな区間では一定のブレーキ力指令を、指令曲線が階段の 部分では該当のブレーキ力変更指令を運転士に送れば良 い。 これにより、辞書とデータベースのサイズを抑えながら 必要な支援情報をカバーし、リアルタイムの支援意思決定 が可能となる。 図 2 支援意思の決定
Fig. 2. Decision making of driving assistance
(3) ブレーキの操作の指令支援 本稿におけるブレーキの操作支援とは、決定したブレー キパターンを運転士に伝達することである。運転士に指令 に円滑に従ってもらうためには、指令の種類ができるだけ 単一で、操作が簡単で、かつ連続する二つの指令の間に時 間の余裕を十分に考慮することが重要である。また、保安 のために、支援指令の最大ブレーキ力を常用最大ブレーキ 力以下に設定し、万が一支援指令で止まれない場合でもよ り強い制動を可能とする必要がある。 以上のように𝑣0を探す二次元の「辞書」と該当のブレー キパターンを含めた𝑣0による一次元データベースを独立に 用意すれば、実際電車が支援開始位置を通過する時の状態 に基づき、リアルタイムに適切なブレーキ指令を出すこと が可能となる。そしてこの提案を、回生失効や回生絞り込 みをどのくらい抑え、回生エネルギーの最大化と機械ブレ ーキの低減にどのくらい貢献できるかに基いて、次章の現 車実験を通じて評価する。 3. 運転支援による運転実験 運転支援の提案を実際の電車走行における性能と効果を 検証するために、交通安全環境研究所、新京成電鉄、東京 大学の共同研究グループが、2012 年 10 月 13~14 日にわた って、千葉県新京成線で、上り方向で新津田沼駅から八柱 駅まで、支援なし通常運転で一回、支援運転で三回の走行 実験を行った。実験当時の天気について、13 日が晴れ、気 温20~24℃、風向北西、風速 1~3m/s で、14 日が曇、気 温17~18℃、風向北東、風速 1~2m/s で、穏やかな天気で ある。 そこで、駅間における、支援なし運転と支援あり運転の 時の電力、エネルギーの使用状況と運転時分を分析して、 異なる線路状況における支援支援の動作と効果を確認す る。 〈3・1〉 分析対象 データ分析では、全区間のデータを羅列するのではなく、 様々な線路状況と運転パターンから、汎用的な運転状況を 反映できる、典型的な運用を選別して評価する。新京成線 では線路状況が複雑で様々な駅間走行パターンが応用され ている。その特徴を活かして代表的な運用を選んで分析す れば、実験線路に限らずより一般的な線路状況でもの支援 効果を示すことができる。 したがって、Table. 1 に示す 4 つの駅間を本論文のデータ 分析に取り上げる。その中に、最高速度まで許す区間や、 駅間が短く十分力行できない区間、急カーブが多く速度制 限が厳しい区間など様々な路線状況が含まれている。また 区間線路状況に合わせて最大力行-惰行-ブレーキという 一般的な走行パターンのほか、速度制限で二段力行・二段 ブレーキなど特別な走行パターンも検討できる。一般的な 線路状況と常用の運転方式をカバーできるので、その評価 結果は汎用的な参考になると考えられる。 その 4 つの区間での運用を簡単に表現するために、Table. 2 に示すように、駅間番号(I、II、III、IV)に支援なしの N (Not assisted) あるいは支援ありの A (Assisted) を付けて略 記する。
4/6
表 1 データ分析駅間
Table. 1. Selection of running operation for analysis
地理状況 運転パターン 駅間 I 前原 ↓ 薬園台 勾配 上り カーブ 緩い 速度制限 なし 駅間距離 長い 線路状況が簡単 なため、フル加速 して高速運転を行 う。 力行-惰行-ブレ ーキ 駅間 II 習志野 ↓ 北習志野 勾配 水平 カーブ 急 速度制限 あり 駅間距離 短い 駅間距離短いた め、フル加速せず 低速運転を行う。 力行-惰行-ブレ ーキ 駅間 III 新津田沼 ↓ 前原 勾配 上り カーブ 急 速度制限 あり 駅間距離 長い 速度制限に合わ せて二段力行を行 う。 力行-惰行-力行 -惰行-ブレーキ 駅間 IV 北初富 ↓ くぬぎ山 勾配 水平 カーブ 急 速度制限 あり 駅間距離 長い 速度制限に合わ せて二段力行及び 二段ブレーキを行 う。 力行-惰行-力行 -惰行-ブレーキ -惰行-ブレーキ * 駅間の半分が上り勾配に占められる場合に「勾配 上り」、上り勾配と 下り勾配も半分以下に占められる場合に「勾配 水平」と表記 ** 駅間で半径が300m以下のカーブがある場合に「カーブ 急」、ない場 合に「カーブ 緩い」と表記 *** 駅間距離が1000m以上の場合に「駅間距離 長い」、1000m以下の場 合に「駅間距離 短い」と表記 **** 運転パターンの「惰行」という表現にはノコギリ運転(惰行による 速度低下を補償する最力行操作)に伴って行うことがある 表 2 駅間運用の表記
Table. 2. Abbreviation of operation 駅間 I 前原- 薬園台 駅間 II 習志野- 北習志野 駅間 III 新 津 田 沼 -前原 駅間 IV 北初富- くぬぎ山 支援なし 運用 I_N 運用 II_N 運用 III_N 運用 IV_N 支援あり 運用 I_A 運用 II_A 運用 III_A 運用 IV_A
N: Not assisted. A: Assisted.
〈3・2〉 支援効果 (1) 省エネルギー効果・電力利用率の向上 駅間 I-IV のブレーキエネルギー回収状況は Fig. 3 に示 す。Fig. 3 (c) では、III_A は運転支援によりブレーキエネ ルギーの回生ブレーキ担う割合がIII_N より大幅に上昇し、 機械ブレーキの使用割合を半分以下に抑え、架線に通じて エネルギーの再利用を達成できた。Fig. 3 (b) では、II_A は 軽負荷回生におけても、運転支援により回生失効を回避し たほか、ブレーキ力の変更を抑えることで、初込めブレー キを抑制し、重負荷回生のII_N よりも優れなエネルギー回 収効果が実現できた。従って、2.1 に提案した「ブレーキ力 を制限することによる回生絞込みの回避」が確認できた。 ただし、情報収集や運転士の反応、列車の反応などの無 駄時間の原因で、Fig.3(a) に示す I_A のように回生失効率 が従来のままのケースもあった。その他に、個別な二段制 動を採用する区間では、運転士従来の操作に合わなかった ため不評判とされていて、Fig.3(d) に示す IV_A のように省 エネルギー効果を引き出すことができなかった。この二点 に関しては〈3・3〉に再議論する。 列車の走行エネルギー回収効果を高めるほかに、惰行距 離を縮めて緩いブレーキに引き換えることで、Fig. 4 に示す ようにブレーキパワーの最大値を抑えて出力を平均化する ことができる。さらに上記の無駄時間に対策すれば、最大 電力をさらに抑えることが考えられる。それにより回生電 力が穏やかになり、将来電力貯蔵システムを設置する場合 でも、必要な負荷を軽く見積もり、導入コストを抑えられ ると考えられる。 (2) ブレーキ力制御と定時運転の両立 各運用の運転時分はFig.5 に示す。支援のない時では、運 転士が強いブレーキをかけ、走行時分に余裕を持って駅に 到着する。一方、支援があるとき、運転士が緩いブレーキ をかけても基準時分を守ることができる。過保護な減速に より低速惰行を挿入したII_A を除けば、全体が計画運転時 分に収まることが確認できる。 従って、運転支援を通じて、従来に実現できなかった、 列車の速度と余裕時分に基づき高速時に弱いブレーキ・低 速時に強いブレーキという運転法が実現できた。車上装置 で必要な情報を収集し、停車駅に定時到着できるブレーキ パターンをリアルタイムに選別して支援指令を出力する。 運転士は従来のように運転に集中し、指令の元に操作すれ ば定時到着することができる。それによって〈2・1〉のブレ ーキ力制御提案を、従来に運転条件に支障なくプラグイン できることが実証された。 (3) 乗り心地の良さ 従来のブレーキパターンは「一段緩め」と呼ばれ、高速 時に強いブレーキをかけ、速度を落としてからブレーキを 緩めて駅の位置に合わせて停車する方式である。このブレ ーキパターンだと、初めのブレーキ力を大きく出したり、 駅の位置に合わせてブレーキ力調整したりするので乗り心 地を悪化させる可能性がある。支援運転におけては、ブレ ーキ距離を伸ばし緩いブレーキをかけるため、従来よりブ レーキ力が小さく、乗客に与える慣性負担を低減できる。 また、ブレーキ力の階段状にあがり、急なブレーキ力変化 がなく、ブレーキ力の変更回数が少ないため、さらに乗り 心地を良くすることができる。
5/6 (4) 自動運転(ATO)への応用 現在では運転士が列車を操作するのが一般的だが、新交 通や地下鉄を始め、自動運転の導入が進められている。実 験においてFig. 6 のように、運転支援機能がリアルタイム に勾配・カーブなどの路線状況を考慮して正しい支援指令 を運転士に送ることから、自動運転の場合では指令を駆動 装置に入力すれば動作可能と考えられる。また、自動運転 では機械への指令から人が操作するまでの遅延がなく、純 電気信号で列車を制御することができるため、より高い精 度で計画ブレーキパターンにしたがって停車できると考え ている。 (5) 支援効果まとめ 以上、現車実験を通じ、提案したブレーキ力制御及び運 転支援アルゴリズムが、多様な駅間走行に応用できること を明らかした。運転支援が列車の状態から適切なブレーキ パターンで支援するため、従来では難しいとされる運転法 が容易になっている。緩いブレーキパターンを採用するこ とで、列車の回生失効率を低減して走行エネルギーの回収 効果を上げることと、電力貯蔵システムが設けられる場合 にブレーキパワーを抑制することで系統の負担を低減する ことができる。さらに、支援システムの無駄時間などの問 題点を対策すれば、支援効果をさらに大きくすることが考 えられる。 図3 機械・回生ブレーキのエネルギーの分担状況 Fig.3. Regenerative/Mechanical ratio of braking
en-ergy
図 4 各運用のブレーキパワー最大値・平均値 Fig.4. Maximum/Average of regenerative power
図 5 駅間走行時分
Fig.5. Running time for each station section
図 6 運転支援の車上装置動作(例) Fig.6. Sample of real-time execution
Assistance starting point Braking assistance Vel ocit y (k m /h) (a) 駅間 I (b) 駅間 II (c) 駅間 III (d) 駅間 IV (a) 駅間 I (b) 駅間 II (c) 駅間 III (d) 駅間 IV
6/6 〈3・3〉実験からわかった問題点と対策 (1) 無駄時間 現車実験の時、支援における無駄時間のため支援効果が 落ちることは〈3・2〉に示した。支援における無駄時間とい うのは、列車の走行状態に適用な指令信号を列車の駆動装 置まで伝達際の遅延時間である。計画ブレーキパターンよ り過走することは支援効果の悪化に直接につながるため、 より安定的な運転支援効果を得るためには無駄時間に対策 をうつ必要がある。 そこにFig.7 に示すように、今現在の速度情報を使って閾 値T 秒後の速度と位置を予測し、その予測結果から現在の 操作を決める「先読み機能」を支援システムに導入するこ とで、無駄時間の影響が抑えられると考えている。 図7 支援指令の先読み機能 Fig.7. Order outputting with prediction
(2) 二段制動 二段制動というのは、速度制限区間前の減速操作と駅前 のブレーキ操作が組み合わせた操作である。二度の制動の 間には列車を惰行させるために、ブレーキを一旦抜く必要 がある。 提案したブレーキパターンでは、Fig.8(a) に示すように、 低速域では強いブレーキをかける方針である。それにより 二段制動の場合では惰行からいきなり強いブレーキをかけ る指令があり、運転士に心理負担を負わせるほか、乗り心 地を悪化する可能性もある。そこに、Fig.8(b) に示すように、 第二段階のブレーキ力を調整する。低速時にブレーキを立 ち上がるときは中間程度のブレーキ力で行う。このように ブレーキ距離を伸ばし弱いブレーキをかけることで、運転 士の心理負担を低減し、少々過走しても修正する余裕があ る。また、惰行状態から立ち上がったブレーキ力が小さい ので、乗り心地を良くすることができる。 4. 結論 以上により、本論文では直流電気鉄道の回生ブレーキを 活用するブレーキ力制御及びそのための支援方法を提案し た。実路線での現車実験を通じて、列車の運転状況に合わ せるリアルタイムの支援機能の正常動作、及び回生エネル ギーをより多く回収する省エネルギー効果を確認し、提案 の有効性を確認した。そして実験から新たにわかった問題 点に対策をうち、省エネルギー効果を一層上げることを目 指している。 なお、本研究は鉄道建設・運輸設備整備支援機構の「運 転分野における基礎的な研究推進制度」採択研究課題とし て実施されたものである。同機構、交通安全環境研究所、 新京成電鉄、セントラルエンジニアリングの関係者各位、 および有益なご指導をいただいた千葉大学近藤圭一郎先生 に謝意を表する。 (a) 不評判とされたパターン (b) 改良パターン 図8 二段制動の改良
Fig.8. Improvement of braking pattern
文 献
(1) 電気車研究会: “鉄道ピクトリアル”, 1999 年 2 月号、No. 665, P. 48-53
(2) 日本民営鉄道協会、環境パンフレット「環境と鉄道」、2008.10 (3) Z.Yang, S.Watanabe, T.Koseki, T.Mizuma, Y.Hamazaki, “Proposal
of train operation assistance for energy saving of DC-electrified trains”, J-RAIL, Sendai, Japan, 2012.12, No.3416 (in Japanese)
直流電気鉄道の省エネルギー運転における電力
制限回生ブレーキの効果と回生率の影響評価
渡邉 翔一郎
*,古関 隆章 (東京大学)
Evaluation of Effects of Regeneration Ratio and Power-Limiting Brakes in Energy-Saving DC-Train Operations Shoichiro Watanabe, Takafumi Koseki (The University of Tokyo)
1.2 つの省エネルギー運転方法と比較する動機 直流電気鉄道において省エネルギー運転を実現するには ノッチオフ速度を下げる,回生ブレーキを精一杯使うなど といった方法がある。ノッチオフ速度を下げると力行に必 要なエネルギーを減らすことができ,回生ブレーキを精一 杯使うと力行で使ったエネルギーの一部を回収することが できるため,全体で見ると消費するエネルギーを少なくす ることができる。しかし,ダイヤ通りに運行するためには 走行時分を守らなければならない。そこで走行時分を守る という制約を考えると,省エネルギー運転の方法は次の 2 つに絞られる。 (Ⅰ) ノッチオフ速度を下げ,強いブレーキをかける (Ⅱ) ノッチオフ速度を下げずに,回生ブレーキを早い時点 からかけはじめる これらの運転方法を取り入れた場合の運転曲線を図 1 に示 す。(Ⅰ)ではノッチオフ速度を下げて時間がかかった分を強 い機械ブレーキをかけて補い,(Ⅱ)では機械ブレーキよりも 緩い回生ブレーキを使って時間がかかった分を最初の力行 で補っている。これらはいずれも有効な手段ではあるが, 一般に走行時分と消費電力量はトレードオフの関係にある ため,両者を同時に実現することは不可能である。また, 直流電気鉄道においては,変電所の整流器にダイオードが 図 1 走行時分を守って省エネルギー運転を実現した場合 の運転曲線
Fig.1. Run curve for energy-saving operation in a standard running time 用いられているため,回生ブレーキで得られた電力は同一 き電区間の他の力行車で消費しなければならない。そこで, 回生電力が失効する場合,つまり電力制限回生ブレーキを 考えて,(Ⅰ)(Ⅱ)の運転手法を様々な路線ケースでシミュレ ーションし,どちらが省エネルギー効果が大きいのかを考 察した。 2.運転曲線とエネルギーの計算方法 今回の検討では通勤電車をモデルに,2km の駅間を力行-惰行-制動で運行し,再力行などは行わないものと仮定した。 また,走行時分と消費電力量の対応を見るために,ノッチ オフ速度を変化させて測定した。そして,この駅間の路線 では (i)勾配 (ii)ブレーキのかけ方 のそれぞれを変化させ て組み合わせて,シミュレーションを行った。まず,(i)で は 0‰と上り 2‰,下り 2‰を準備し,路線環境の変化によ る影響を調べた。(ii)では機械ブレーキで減速した場合,回 生ブレーキで減速した場合,そして電力制限回生ブレーキ で減速した場合を準備した。ここで,電力制限回生ブレー キでは回生電力の 50%が失効した場合を想定している。機 械ブレーキの強さは常用最大ブレーキの減速度 3.5km/h/s に 設定した。なお,回生ブレーキもこの減速度を超えない範 囲で制動している。 消費電力量 Ep [kWh]と回生電力量 Er [kWh]の計算には式 (1)~(3)を用いた。 𝐸𝑝 = ∫ 𝐹𝑚𝑣 1 η𝑑𝑡 ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ (1) 𝐸𝑟 = ∫ 𝐹𝑚 𝑣 η 𝑑𝑡 ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ (2) η = 0.90 × 0.95 × 0.975 ⋯ ⋯ ⋯ (3) Fmは引張力[N],v は速度[km/h],ηはエネルギーの変換効率 で「モータの効率×インバータの効率×駆動装置の効率」 で定義する。 3.計算結果と得られる知見 定員乗車でシミュレーションした結果を図 2 に示す。各 図の凡例の「機械ブレーキ」が(Ⅰ)の手法に対応し,「電力 制限回生ブレーキ」と「回生ブレーキ」が(Ⅱ)の手法に対
応
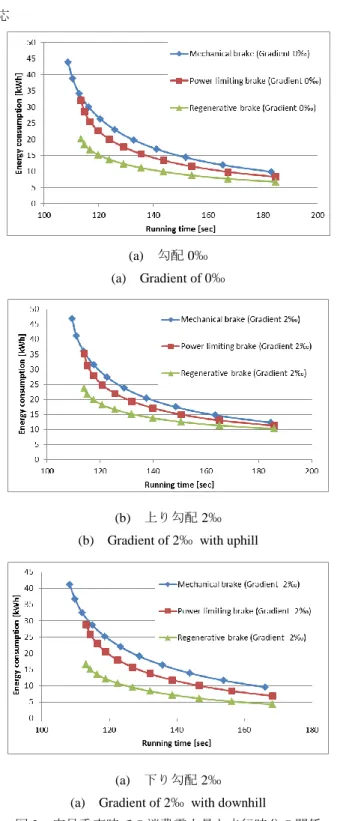
(a) 勾配 0‰ (a) Gradient of 0‰
(b) 上り勾配 2‰ (b) Gradient of 2‰ with uphill
(a) 下り勾配 2‰ (a) Gradient of 2‰ with downhill
図 2 定員乗車時での消費電力量と走行時分の関係 Fig.2. Relation between running time and energy consumption in
riding capacity of 100% している。 図 2 のグラフを見ると,駅間を早く走ろうとするほど消 費電力量が大きくなっている。そして,グラフの傾きに注 目すると,最短時間に近づくほど 1 秒縮めるのに必要なエ ネルギーが大きくなっている。 また,グラフの左端に注目すると,回生ブレーキを利用 した運転手法では機械ブレーキを利用した運転手法より 早く走ることができないことがわかる。 図 2~4 において同じ走行時分で見ると,どのケースで も機械ブレーキを用いるより回生ブレーキを用いた方が 消費電力量が少なくなっている。したがって,これらのケ ースでは(Ⅰ)の手法より(Ⅱ)の手法の方が省エネルギー効 果が大きいことがわかる。これらの結果から,今後列車の ATO を設計する際の思想として,回生ブレーキを精一杯活 用する設計が良いと結論付けられる。 図 2 において電力制限ブレーキを見ると,走行時分が短 くなるほど機械ブレーキのグラフに近づいていることが わかる。したがって回生失効の割合が増える列車の運転間 隔が長い路線や,列車運行で遅延が発生した時など,走行 時分を短くしたい場合では(Ⅰ)の手法の方が優れるケース があることも予想される。 走行時分が短いところでのグラフの傾きの絶対値を見 ると,図 2 の(b),(a),(c)の順に大きくなっている。これは 上り勾配が下り勾配に比べて力行時に扱う電力量が増え, ブレーキ時に扱う電力量が減っているためにこのような 結果になったものと考えられる。 一方で走行時分が長いところでの 3 つのグラフの間隔に 注目すると,図 2 の(c),(a),(b)の順に開いている。これは 前述の場合とは逆に,下り勾配が上り勾配に比べて力行時 に扱う電力量が減り,回生ブレーキで扱う回生電力量が増 えるためにこのような結果になったものと考えられる。 今後は電力制限回生ブレーキの回生失効率を変化させ た場合や,勾配の大きい場合についてシミュレーションし, 電力制限回生ブレーキの効果と回生率の影響をより深く 評価していく予定である。なお,本研究は(独)鉄道建設・ 運輸施設整備支援機構の「運輸分野における基礎的研究推 進制度」平成22年度採択課題(2010-04)「持続可能な低コ スト・省エネルギー鉄道のためのパワーマネージメント」 の一環として行われている。(独)鉄道建設・運輸施設整 備支援機構の御支援に感謝する。 文 献
(1) Takafumi Koseki , Yuto Takahashi , and Zhe Yang, “Energy-Saving Operation of an Electric Train at Multiple Service Section Based on Sensitivity Analysis of Energy Consumption to Running Time”, ICEMS2012, October 2012, Sapporo, Japan
(2) Masafumi Miytake, “A method of Generating Energysaving Train Scheduling by Means of Mathematical
Programming”, Trans. IEE of Japan, vol.131-D, No.6, pp.860-861, 2010
TER-13-005 PHS-13-009 1/5
省エネルギー運転法の相違による
消費エネルギーと走行時分変化の傾向分析
渡邉 翔一郎
*楊 哲 古関 隆章(東京大学)
Analysis of the Relationship between Energy Consumption and Train Running Time Depending on Different Energy-Saving Train Operation Method
Shoichiro Watanabe*, Zhe Yang, Takafumi Koseki (The University of Tokyo)
For an energy-saving train operation, mainly we have two options. One is applying a low notch-off speed with a strong brake. The other one is applying a fully regenerative brake with an ordinary notch-off speed. We compare these two methods to find the evaluation indicators of energy consumption for the optimization of train sched-uling.
キーワード:電気鉄道,回生ブレーキ,省エネルギー,回生失効,電力制限ブレーキ,走行時分
(Electric railway, Regenerative brake, Energy-saving, Regeneration cancelation, Power-limiting brake, Running time) 1. はじめに 現在の日本の鉄道ダイヤは保守的に決められており,乗 客の乗車時間が最優先に考慮されている。事業者は省エネ ルギー問題への取り組みとして鉄道車両や電気設備におい て電気機器の効率化などの改良を行なってきたが,列車運 行の方法の改善によって消費エネルギーを大きく低減でき る可能性のあることが既に知られている(1)。この方法はソフ トウェア的な手法であるため,ハードウェアに手を加える ような設備改造が不要である。したがって,事業者側にと っては安価で取り組みやすい手法である。そこで運行計画 や運転整理の議論に省エネルギーの視点を入れることを目 標にし,本稿ではそのための基礎的な考察を述べる。 2. 運転法の比較を行うことの意味 直流電気鉄道において省エネルギー運転を実現するには ノッチオフ速度を下げる,回生ブレーキを精一杯使うなど といった方法がある。ノッチオフ速度を下げると力行に必 要なエネルギーを減らすことができ,回生ブレーキを精一 杯使うと力行で使ったエネルギーの一部を回収することが できるため,全体で見ると消費するエネルギーを少なくす ることができる。そして,走行時分に余裕があるほど惰行 時間が伸びるため,消費電力量を減らすことができること が知られている(2)(3)。しかし,本稿の目的である運行計画や 運転整理の議論に省エネルギーの視点を入れるには運行ダ イヤを守らなければならない。つまり,走行時分を守るこ とは運転法を考える上で重要である。そこで走行時分を守 るという制約を考えると,省エネルギー運転の方法は次の2 つに絞られる。 (Ⅰ) ノッチオフ速度を下げ,強いブレーキをかける (Ⅱ) ノッチオフ速度を下げずに,回生ブレーキを早い時 点からかけはじめる これらの運転方法を取り入れた場合の運転曲線を図1 に示 す。(Ⅰ)ではノッチオフ速度を下げて時間がかかった分を強 いブレーキをかけて補い,(Ⅱ)では(Ⅰ)のブレーキよりも緩 い回生ブレーキのみを使って時間がかかった分を最初の力 行で補っている。これらはいずれも有効な手段ではあるが, 先述の通り一般に走行時分と消費電力量はトレード・オフ の関係にあるため,両者を同時に実現することは不可能で ある。そこで,これら 2 つの手法を比較検討していくこと にする。 3. 列車運転のモデル化とエネルギーの計算方法 〈3・1〉運転モデル 今回の検討では通勤電車をモデルに,図 1 に示すような 2km の駅間を力行-惰行-制動で運行することを考える。 ここでは,再力行は行わない。そして,走行時分と消費電 力量の対応を見るために,ノッチオフ速度を変化させた場 合に,消費電力量がいくらになるのかを計算した。また,
2/5
図1 走行時分を守って省エネルギー運転を実現した場 合の運転曲線
Fig.1. Possible run curves for energy-saving operation in a standard running time
平坦な路線の他に勾配をつけた路線も考えた。 〈3・2〉勾配を考える意味 列車が駅間を走行する際にエネルギーを損失する一因と して走行抵抗がある。その中でも本稿では勾配抵抗に注目 し,上り勾配2‰,平坦,下り勾配 2‰を設定し,それぞれ でシミュレーションを行った。その理由は,まず勾配抵抗 は列車の加速度に大きく影響することにある。上り勾配で あれば力行時にエネルギーを大きく消費する要因になる が,制動時には減速の手助けになる。下り勾配はその逆で ある。本稿で検討する 2 つの運転手法はエネルギーの観点 で見れば, (Ⅰ)力行エネルギーを削減する運転手法 (Ⅱ)制動時にエネルギーを効率よく回収する運転手法 の比較であるため,勾配が影響するところが大きいと考え る。 また,勾配は列車の位置エネルギーを変化させる。上り 勾配であれば力行エネルギーの一部は列車の位置エネルギ ーになり,下り勾配であれば列車の位置エネルギーが列車 の力行エネルギーと回生エネルギーになる。 また,走行時分の観点では列車の引張力は応荷重装置が 働く場合であれば車重で決まるため,勾配は加速に要する 時間にも影響を与えることになる。 〈3・3〉ブレーキのかけ方 (Ⅰ)の運転手法では遅れ込め制御の入った電空協調ブレ ーキを用いる。電空協調ブレーキとは電気ブレーキと機械 ブレーキを同時もしくは切り替えて制動力を得るブレーキ である。本稿ではこの電気ブレーキを回生ブレーキとして 用い,遅れ込め制御により要求する制動力を優先的に回生 ブレーキに負担させている。機械ブレーキは列車の運動エ ネルギーを全て摩擦熱として捨てることになるが,確実に 制動力を得ることができ,この制動力は回生ブレーキより も大きいため,走行時分を縮める上では有効である。今回 の 電 空 協 調 ブ レ ー キ の 減 速 度 は 常 用 最 大 ブ レ ー キ の 3.5km/h/s に設定した。 (Ⅱ)の運転手法では回生ブレーキを用いる。回生ブレーキ は列車の運動エネルギーを電気エネルギーに変換できるた め,力行エネルギーの一部を回収することができる。しか し,制動力は機械ブレーキより小さいため減速するのに時 間を要する。 〈3・4〉回生失効と電力制限ブレーキ 直流電気鉄道においては,多くの変電所の整流器にダイ オードが用いられているため,回生ブレーキで得られた電 力を利用するには同一き電区間の他の力行車で消費しなけ ればならない。同一き電区間に力行車が居ない場合には回 生エネルギーを消費できないため,回生失効が生じる。ま た,他の力行車がいても回生エネルギーが大きい場合には その一部しか再利用されず,回生絞り込みが行われる。こ れらの制約を考慮して,電力制限ブレーキを用意した。こ れはある列車が回生ブレーキを使って生み出した回生エネ ルギーの一部が回生エネルギーとして利用された場合を想 定したパターンである。本稿では,はじめの検討としてま ず(Ⅱ)の運転手法時における電力制限回生ブレーキを考え, 50%と 30%が回生された場合を検討した。 〈3・5〉エネルギーの計算方法 消費電力量Ep [kWh]と回生電力量Er [kWh]の計算には 式(1)~(3)を用いた。 𝐸 = ∫ 𝐹 𝑣1 η𝑑𝑡 ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ (1) 𝐸 = ∫ 𝐹 𝑣 η 𝑑𝑡 (6 ≤ 𝑣) ⋯ ⋯ ⋯ ⋯ (2) η = 0.90 × 0.95 × 0.975 ⋯ ⋯ ⋯ (3) Fmは引張力[N],vは速度[km/h],ηはエネルギーの変換 効率で「モータの効率×インバータの効率×駆動装置の効 率」である。ηは架線電圧,電流,列車速度等を引数にする 関数であるが,ここでは簡単のため(3)式のように定数で与 えている。 (2)式において,6km/h 以下では回生ブレーキによって得 られる電力が小さいため,その領域ではEpは0 にしている。 4. 計算結果と得られる知見 定員乗車でシミュレーションした結果を図 2 に示す。各 図の凡例の「機械ブレーキ」と「電空協調ブレーキ」が(Ⅰ) の手法に対応し,「電力制限回生ブレーキ」と「回生ブレー キ」が(Ⅱ)の手法に対応している。ここで機械ブレーキとは, 電空協調ブレーキの機械ブレーキのみを利用したモデルで ある。また〈3・4〉で述べた通り,本稿では電力制限ブレー キをまず(Ⅱ)の運転手法時において考える。 〈4・1〉走行時分を縮めるのに必要なエネルギー 走行時分を縮めるのに必要なエネルギーについて考え る。図2 はノッチオフ速度を変化させた時の各勾配・ブレ ーキ毎の消費電力量と走行時分の関係である。ここで消費 0 20 40 60 80 100 0 1 2 Sp e e d [km /h ] Distance[km]
Ⅰ
Ⅱ
3/5
(a) 勾配 0‰ (a) Gradient of 0‰
(b) 上り勾配 2‰ (b) Gradient of 2‰ with uphill
(c) 下り勾配 2‰
(c) Gradient of 2‰ with downhill 図 2 定員乗車時での消費電力量と走行時分の関係 Fig.2. Relation between running time and energy
con-sumption at full number of passengers
電力量に注目すると,駅間を早く走ろうとするほど消費電 力量は大きくなっている。そして,グラフの傾きに注目す ると,最短時間に近づくほど1 秒縮めるのに必要なエネル ギーが大きくなっている。これは惰行時間が短くなるため に見られる普遍的な傾向である。 また,グラフの左端に注目すると,回生ブレーキを利用 した運転手法では機械ブレーキを利用した運転手法より早 く走ることができないことがわかる。これは回生ブレーキ の減速度が機械ブレーキの減速度に及ばないためである。 〈4・2〉回生失効しない場合における回生ブレーキの大きな 優位性 回生ブレーキが列車の省エネルギー運転に貢献する優位 性を考える。図2 の(a)~(c)は,各勾配における消費電力量 と走行時分の関係である。図2 の各グラフにおいて同じ走 行時分で見ると,回生失効しない場合ではどのケースでも 回生ブレーキを用いた方が,消費電力量が少なくなってい る。したがって,回生失効しない路線では(Ⅰ)の手法より(Ⅱ) の手法の方が,省エネルギー効果が非常に大きい。この結 果から,今後列車のATO を設計する際の思想として,回生 ブレーキを精一杯活用する設計が良いと結論付けられる。 〈4・3〉勾配抵抗が与える影響 勾配抵抗が列車の加減速,走行時分ならびに消費電力量 に与える影響を考える。 ここで図2 の(a)~(c)において,走行時分が短いところで のグラフの傾きの絶対値を見ると,図2 の(b),(a),(c)の順 に大きくなっている。これは上り勾配の場合,列車の力行 エネルギーは運動エネルギーだけでなく位置エネルギーに もなるため,力行時に扱う電力量が増え,ブレーキ時は扱 う電力量が減っているためである。 一方で走行時分が長いところでの 3 つのグラフの間隔に 注目すると,図2 の(c),(a),(b)の順に開いている。これは 前述の場合とは逆に,下り勾配は列車の力行エネルギーの 他に列車の位置エネルギーが運動エネルギーになるため, 力行時に扱う電力量が減り,回生ブレーキで扱う回生電力 量が増えるためである。 〈4・4〉回生失効が回生ブレーキの優位性に与える影響 〈4・2〉において,回生失効しない場合においては回生ブ レーキを使った運転はいかなる条件においても省エネルギ ー運転法に有効であるということを明らかにした。しかし, 現実には回生失効が起こりうるのでその影響を簡易なケー ススタディを通して分析する。 ここで,図 2 の(a)~(c)において電力制限ブレーキの消 費電力量と走行時分の関係を見ると,走行時分が短くなる ほど機械ブレーキのグラフに近づいている。そして,回生 失効の割合が多くなると消費電力量は機械ブレーキを使っ た(Ⅰ)の手法のほうが少なくなり,走行時分によっては優位 性がなくなることがわかる。 0 5 10 15 20 25 30 35 40 45 50 100 150 200 En e rg y Co n su m p tion [kWh ]
Running Time [sec]
Mechanical Brake Power-Limiting Brake 30% Power-Limiting Brake 50% Cooperation Control of Air Brake and Electric Brake
Regenerative Brake 0 5 10 15 20 25 30 35 40 45 50 100 150 200 En er gy Con sum p ti on [kW h ]
Running Time [sec]
Mechanical Brake Power-Limiting Brake 30% Power-Limiting Brake 50% Cooperation Control of Air Brake and Electric Brake
Regenerative Brake 0 5 10 15 20 25 30 35 40 45 50 100 150 200 En er gy Con sum p ti on [kW h ]
Running Time [sec]
Mechanical Brake Power-Limiting Brake 30% Power-Limiting Brake 50% Cooperation Control of Air Brake and Electric Brake