Title
有限要素法を用いた三次元電磁界解析の高速化に関する研
究( 本文(Fulltext) )
Author(s)
片桐, 弘雄
Report No.(Doctoral
Degree)
博士(工学) 甲第453号
Issue Date
2014-03-25
Type
博士論文
Version
ETD
URL
http://hdl.handle.net/20.500.12099/49022
※この資料の著作権は、各資料の著者・学協会・出版社等に帰属します。博
士 論 文
有限要素法を用いた三次元電磁界解析の高速化に関する研究
Acceleration of three-dimensional electromagnetic field analysis
using finite element method
平成
26 年 3 月
博
士 論 文
有限要素法を用いた三次元電磁界解析の高速化に関する研究
Acceleration of three-dimensional electromagnetic field analysis
using finite element method
平成
26 年 3 月
-i- 有限要素法を用いた三次元電磁界解析の高速化に関する研究 目 次 第1章 緒論 ··· 1 1.1 電気機器の三次元電磁界解析の高速化手法の動向と問題点 ··· 1 1.2 本研究の目的と意義 ··· 2 1.3 本研究の内容概略··· 2 第2章 辺要素有限要素法による三次元電磁界解析手法 ··· 4 2.1 緒言 ··· 4 2.2 電磁界解析法 ··· 4 2.2.1 基礎方程式 ··· 4 (1)静磁場 ··· 4 (2)時間依存場 ··· 5 (3)永久磁石を含む場 ··· 5 2.2.2 有限要素法による定式化 ··· 6 (1)ガラーキン法による残差方程式 ··· 6 (2)境界条件 ··· 8 (3)未知数の定義法 ··· 10 (4)一次四面体辺要素による離散化 ··· 12 (a)補間関数 ··· 12 (b)積分公式 ··· 14 (5)一次三角柱辺要素による離散化 ··· 15 (a)補間関数 ··· 15 (b)数値積分法 ··· 17 2.2.3 時間依存場計算法 ··· 19 2.2.4 非線形計算法 ··· 19 2.3 回路方程式との連立法 ··· 20 2.4 節点力法によるトルクの計算法 ··· 22 2.5 回転機の要素分割修正法 ··· 24 2.6 結言 ··· 25
-ii- 第3章 一次三角柱辺要素を用いた三次元電磁界解析への適用例 ··· 26 3.1 緒言 ··· 26 3.2 インバータで駆動される埋込構造永久磁石同期電動機の解析 ··· 26 3.2.1 コギングトルク解析 ··· 26 3.2.2 PWM インバータ駆動時の解析 ··· 28 3.3 非接触充電コイルの解析 ··· 31 3.3.1 一次三角柱辺要素と一次四面体辺要素による解析 ··· 31 3.3.2 二次コアの分割が二次コア中の渦電流損に及ぼす影響 ··· 35 3.4 結言 ··· 38 第4章 簡易TP-EEC 法を用いた三次元電磁界解析の過渡収束改善手法 ··· 39 4.1 緒言 ··· 39 4.2 TP-EEC 法··· 39 4.3 簡易TP-EEC 法 ··· 40 4.3.1 簡易TP-EEC 法の概要 ··· 40 4.3.2 簡易TP-EEC 法の補正効果 ··· 41 4.4 回転機解析のための簡易TP-EEC 法の拡張 ··· 42 4.4.1 同期電動機の場合 ··· 42 4.4.2 誘導電動機の場合 ··· 42 4.5 簡易TP-EEC-DC 法 ··· 43 4.5.1 半周期性の簡易TP-EEC-DC 法 ··· 43 4.5.2 一周期性の簡易TP-EEC-DC 法 ··· 43 4.6 結言 ··· 45 第5章 簡易TP-EEC 法を用いた三次元電磁界解析への適用例 ··· 46 5.1 緒言 ··· 46 5.2 回転機への簡易TP-EEC 法の適用 ··· 46 5.2.1 埋込構造永久磁石同期電動機への適用 ··· 46 5.2.2 誘導電動機への適用 ··· 50 5.3 IEEJ ベンチマークモデルへの簡易 TP-EEC-DC 法の適用 ··· 54 5.4 シールド板付きC 形コアへの簡易 TP-EEC-DC 法の適用 ··· 57 5.5 結言 ··· 60 第6章 結論 ··· 61 謝辞 ··· 63
-iii-
参考文献 ··· 64
- 1 -
第1章 緒論
1 . 1 電 気機 器の 三 次元 電 磁界 解 析に おけ る 高速 化 手法 の 動向 と問 題 点 近 年 の計 算 機の 性能 向 上と 数 値解 析 技術 の進 歩 に伴 い ,有 限 要素 法等 を 用い た 電磁 界 解 析技 術 の電 気機 器 への 実 用的 な 利用 能力 は 目覚 し く向 上 し, 試作 コ スト の 削減 や 開 発 期 間 の 短 縮 の た め の 強 力 な 道 具 と な っ て お り(1), 設 計 や 開 発 の 現 場 に 広 く 普 及 し て い る。 一 方 ,電 磁 界解 析 の 普 及に 伴 い, こ れま で解 析 が困 難 であ っ た複 雑か つ 大規 模 な問 題 が 解析 対 象と なる よ うに な った た め, 現在 の 計算 機 の性 能 をも って し ても , 計算 時 間 が 数週 間 から 数ヶ 月 以上 に 及ぶ 場 合も 珍し く ない 。 そ の ため , 高速 化計 算 の要 求 に一 段 と拍 車が か かり , 電磁 界 解析 のさ ら なる 高 速化 が 望 まれ て いる 。 電 磁 界解 析 では ,通 常 ,非 線 形反 復 計算 ルー プ の内 側 に線 形 化さ れた 連 立一 次 方程 式 を 解く た めのICCG法(2)の よ う な反 復法 の ループ を 含む 。し た がっ て,一 般 的な 電 磁 界 解 析は ,時間 ス テッ プ- 非 線形 反 復- 連立 一 次方 程 式の3重ループ構造となる。電磁 界 数 値解 析 の計 算時 間 を削 減 する た めに は ,3重ループのいずれかを高速化すればよい。 例 え ば , 連 立 一 次 方 程 式 の ル ー プ の 高 速 化 手 法 と し て , マ ル チ グ リ ッ ド 法(3)や 領 域 分 割 に よ る 並 列 計 算(4)な ど が あ げ ら れ る 。 非 線 形 反 復 の 収 束 特 性 の 高 速 ・ 安 定 化 手 法 と し て , 直 線 探 索(5)に 関 す る 研 究 が 盛 ん に 行 わ れ て い る 。 ま た , 時 間 ス テ ッ プ の ル ー プ の 高 速化 と して は, 複 素近 似 法が 挙 げら れる 。 時 間 ステ ッ プの ルー プ の新 た な高 速 化手 法の 一 つと し て, 渦 電流 を考 慮 した 電 気機 器 の 定常 解 析に おけ る 数値 解 析的 な 過渡 現象 を 抑え , 時間 ス テッ プ数 を 削減 で きる 簡 易time periodic-explicit error correction(TP-EEC)法(6)が 提 案 され て いる。この 手 法は 機 械 的 な 動作 を 伴わ ない 電 気機 器 の 電 磁 界解 析に 適 用さ れ てき た 。し かし , 本研 究 の開 始 時 に は,回転 機 のよ うに機 械 的な 周 期的 な動 作 を伴 う 電気 機 器へ の簡 易TP-EEC法の適 用 法 が報 告 され てい な かっ た 。さ ら に, 産業 応 用の 分 野で は 交流 に直 流 が重 畳 した 強 制 電 流を 流 す電 気機 器 もあ り ,こ れ らの 電気 機 器に は 直流 磁 界が 含ま れ るた め 磁界 の 半 周 期性 を 利用 する 従 来の 簡 易TP-EEC法はそのままでは適用できかった。そこで,本 研 究 では 回 転機 や直 流 分が 含 んだ 電 磁界 解析 に も適 用 でき る 過渡 収束 改 善法 を 提案 し, 時 間 ステ ッ プの ルー プ の高 速 化を 目 指す 。 ま た ,連 立 一次 方程 式 のル ー プの 高 速化 にお い ては , 有限 要 素の 要素 形 状を 検 討す る こ とも 考 えら れる 。 電気 機 器の 三 次元 電磁 界 解析 で は, 要 素分 割が 容 易で 複 雑な 三 次 元 形 状 に 柔 軟 に 対 応 で き る 一 次 四 面 体 辺 要 素(7)が 多 く 用 い ら れ て い る 。 一 次 四 面 体 辺 要 素を 用 いた 解析 で は, 薄 く扁 平 な要 素が あ る場 合 ,計 算 精度 が著 し く悪 化 する こ と が 報 告 さ れ て お り(8), 薄 膜 等 の 薄 い 形 状 の 部 品 を モ デ ル 化 す る 際 に は 厚 み 方 向 の 長 さ に 合わ せ てメ ッシ ュ を非 常 に細 か く分 割し な けれ ば なら ず 要素 数が 膨 大に な って し- 2 - ま う 問 題 が あ る 。 一 方 で , 一 次 三 角 柱 辺 要 素(9)を 使 え ば , 厚 み 方 向 に 薄 く 扁 平 な 要 素 で も 精度 が 悪化 しな い ため , 薄い 形 状の 部品 が ある 場 合で も 少な いメ ッ シュ で 精度 よ く 高 速に 計 算で きる と 考え ら れる 。 また ,モ ー タや 非 接触 充 電コ イル の よう に モデ ル 形 状 が単 純 で, 三次 元 メッ シ ュを 二 次元 の分 割 図か ら 積み 上 げて 作成 で きる 場 合に 限 れ ば ,三 角 柱辺 要素 で も容 易 に要 素 分割 がで き ,一 次 三角 柱 辺要 素に 優 位性 が ある と 考 え られ る 。そ こで 本 研究 で は, モ ータ や非 接 触充 電 コイ ル の電 磁界 解 析に 三 角柱 辺 要 素 を用 い るこ とで 未 知数 の 削減 やICCG法の収束性向上により,連立一次方程式のル ー プ の高 速 化を 目指 す 。 1 . 2 本 研究 の目 的 と意 義 本 研 究の 目 的は ,電 気 機器 の 電磁 界 解析 の高 速 化を 達 成す る こと であ る 。そ の ため に , 本研 究 では 以下 の3つの検討を行う。 一 次 三角 柱 辺要 素に よ る電 磁 界解 析 を用 い, 電 気機 器 の 電 磁 界解 析の 高 速化 を 達成 す る 。 回 転 機解 析 のた めの 簡 易TP-EEC法の適用法を開発し,回転機の 電磁界解析の高速化 を 達 成す る 。 直 流 磁界 を 含む 電気 機 器の 電 磁界 解 析の 数値 解 析的 な 過渡 を 取り 除く た めに , 従 来 の 簡 易TP-EEC法を拡張した簡易 simplified TP-EEC method for DC magnetic field method (TP-EEC-DC法)(10)を 開 発 し , 直 流 磁 界 を 含 む電 気機 器 の 電 磁 界 解 析 の高 速化 を 達 成 す る 。 こ の 目的 の 達成 によ り ,開 発 した 手 法が 電気 機 器の 設 計・ 開 発プ ロセ ス の効 率 化に 大 き く貢 献 する こと が 期待 さ れる 。 1 . 3 本 研究 の内 容 概要 本 研 究は 本 章を 含め6章からなる。 第2章では,電気機器の電磁界解析に必要な有限要素法について論述する。まず,マ ク ス ウェ ル の電 磁方 程 式を 磁 気 ベ ク トル ポテ ン シャ ル と電 気 スカ ラポ テ ンシ ャ ルを 使 っ て 一次 四 面体 辺要 素 およ び 一次 三 角柱 辺要 素 によ る 定式 化 を行 い, 時 間微 分 は後 退 差 分 近似 に よっ て離 散 化す る 。次 に ,鉄 など の 材料 の 透磁 率 の非 線形 性 を考 慮 する た め の 方法 と して ,ニ ュ ート ン ・ラ フ ソン 法を 用 いた 非 線形 問 題の 定式 化 につ い て述 べ る 。 さら に ,磁 界の 方 程式 と 回路 方 程式 を連 立 させ た 解析 手 法や 回転 機 のメ ッ シュ 修 正 法 およ び 電磁 力計 算 方法 に つい て 述べ る。 第3章では,一次三角柱辺要素と 一次四面体辺要素を用い て PWMインバータで駆 動 さ れ る埋 込 構造 磁石 電 動機 お よび 非 接触 充電 コ イル の 電磁 界 解析 を行 い ,計 算 精度 , 計 算 速度 の 観点 から 三 角柱 辺 要素 の 優位 性を 明 らか に する 。 第4章では,数値解析的な過渡を取り除き,高速に定常解を求められる簡易 TP-EEC
- 3 - 法 に つい て 述べ ると と もに そ の手 法 の回 転機 解 析の た めの 適 用法 につ い て述 べ る。 さ ら に , 直 流 成 分 を 含 む 磁 界 の 定 常 解 析 に 簡 易TP-EEC 法 を 適 用 す る た め , 簡 易 TP-EEC-DC法を提案する。 第5章では,回転機解析のための簡易 TP-EEC法 の適用法を埋込磁石構造形同期電動 機 と 誘導 電 動機 に適 用 し,提 案 手法 の 実用 的な 回転 機 に対 す る有 用性 を 明ら か にす る 。 さ ら に,簡 易TP-EEC-DC法を渦電流場数値計算技術調査専門委員会で提案されている 三 次 元 渦 電 流 解 析 検 証 用 標 準 ベ ン チ マ ー ク モ デ ル(11)の 線 形 磁 界 解 析 お よ び シ ー ル ド 板 付 きC形 コアの 非線 形磁 界解 析に 適用し ,簡 易 TP-EEC-DC法 に よ り,過渡 収束 改善 法 の 適用 範 囲を 更に 拡 げる こ とが で きる こと を 明ら か にす る 。 第6章では 2~5章で得られた成果を要約している。
- 4 -
第2章 辺要素有限要素法による三次元電磁界解析手法
2 . 1 緒 言 電 気機 器 の設 計・ 開 発に お ける 電 磁界 解析 技 術の 役 割は 大 きく ,ト ル クや 誘 起電 圧 の 算 出を は じ め ,損 失 や効 率 の算 出 など に盛 ん に用 い られ て いる 。 電 磁 界解 析 の多 く は 有 限要 素 法(12)を 利用 して お り ,そ こ に用 い られて い る基 礎 方程 式・定式化 お よび 離 散 化 を理 論 的に 示す こ とは , 非常 に 重要 であ る 。 そ こで 本 章で は, 三 次元 有 限要 素 法に よる 電 磁界 解 析 の 定 式化 を行 う 。ま ず ,マ ク ス ウ ェル の 電磁 方程 式 を磁 気 ベク ト ルポ テン シ ャル お よび 電 気ス カラ ポ テン シ ャル に よ っ て表 し ,一 次四 面 体辺 要 素と 一 次三 角柱 辺 要素 に よる 定 式化 を行 う 。ま た ,時 間 微 分 項は 後 退差 分近 似 によ っ て定 式 化す る。 次 に, 鉄 など の 材料 の透 磁 率の 非 線形 性 を 考 慮す る ため の方 法 とし て ,ニ ュ ート ン・ ラ フソ ン 法を 用 いた 非線 形 問題 の 解析 手 法 に つい て 述べ る。 さ らに , 磁界 の 基礎 方程 式 と回 路 方程 式 を連 立さ せ た解 析 法, 回 転 機 の要 素 分割 図作 成 法お よ び電 磁 力・ 損失 の 計算 方 法に つ いて 述べ る 。 2 . 2 電 磁界 解析 法(1),(12) 2 . 2. 1 基 礎方 程 式 ( 1 ) 静 磁場 電 磁界 の 現象 はマ ク スウ ェ ルの 電 磁方 程式 を 用い て 表す と 次式 とな る(13)。t
J
D
H
rot
(2.1)t
B
E
rot
(2.2)0
div
B
(2.3)
D
div
(2.4) こ こ でHは磁 界の強さ, Jは電流密度, Dは 電束密度 , Eは電界 の強さ, Bは 磁束密度 , は 電 荷 密 度で あ る。 また ,B,H,D,E,Jの間には次の関係がある。H
B
(2.5)E
D
(2.6)E
J
(2.7) こ こ では 透 磁 率 ,は 誘 電 率 ,は 導 電 率 で あ る 。(2.3)式よ り 次式 で 定義さ れ る 磁気 ベ ク トル ポ テン シャ ルA(14)を 導 入 す る。A
B rot
(2.8) 静 磁 場 問 題 で は 磁 気 ベ ク ト ル ポ テ ン シ ャ ルAを用い て (2.1)式 の時 間微 分項を 零 とす る と (2.1)式,( 2.5)式より解くべき静磁場の基礎方程式は次式のように表せる。- 5 -
A
J
A
rot
rot
rot
1
rot
(2.9) こ こ では磁気抵抗率である 。静磁界問題は (2.9)式を満足する磁気ベクトルポテンシ ャ ルAを求めて,(2.8)式より次のように磁束密度 Bのx,y,z方向の成分Bx,By,Bzを 求 め る こと に なる 。
y
A
x
A
B
x
A
z
A
B
z
A
y
A
B
x y z z x y y z x (2.10) ( 2 ) 時 間依 存場 磁 束が 時 間的 に変 化 する た め解 析 領域 内に あ る導 体 また は 磁性 体に 渦 電流 が 流れ , そ れ によ る 反作 用磁 界 が問 題 とな る 場合 につ い て考 察 する 。 ただ し, 低 周波 を 扱う 問 題 で は マク ス ウ ェル の 基礎 方 程 式の(2.1)式右辺の時間微分項の変位電流を無視するこ と が でき る 。(2.8)式を (2.2)式に代入すると次式を得ることができる。
grad
t
A
E
(2.11)こ こ で は 電気 ス カラ ポテ ン シ ャル であ り , grad は rot( grad)=0に 起 因 し て 生じ る 項 であ る 。こ れ より(2.7)式と(2.11)式から時間依存場の磁界の基礎方程式は次式で表 さ れ る。
rot
A
J
0
J
erot
(2.12)
grad
t
eA
J
(2.13) こ こ でJ0は 強 制 電 流 密 度 ,Jeは 渦 電 流 密 度 で あ る 。 な お , 辺 要 素 を 用 い る 場 合 は ゲ ー ジ 条 件 と し て =0を 選 択 で き る ため (2.13)式より 電 気 ス カラ ポ テ ンシ ャル を 削 除 す る こ とも で き(15),渦電 流場 の 定式 化 が簡 単に な る。た だし ,電気 スカ ラ ポテ ン シャ ル を未知とした場合,係数マトリクスの特異値 の分布が改善されるため,連立一次方 程 式 の 解 法 で あ るICCG法 の 収 束 特 性 が 改善 さ れ計 算 時 間 が 短 い とい う 利点 が あ る(16)。 ( 3 ) 永 久磁 石を 含 む場 外 部 か ら の 強 制 電 流 密 度J0と 渦 電 流 密 度Je以 外 に 磁 界 を 作 る 永 久 磁 石 が 存 在 す る 場 合 , 永 久 磁 石 の 磁 気 特 性 は 磁 化Mを用いて表現することになる。すなわち一般の磁性 体 の 磁気 特 性が(2.5)式で表されるのに対して,永久磁石の磁気特性は次式で表される。M
H
B
0
(2.14)- 6 - こ こ で0は 真 空 の 透 磁 率 で あ る 。 こ の よ うに 解 析領 域 内 に 一 般 の 磁性 体 と永 久 磁 石 が 混 在 し て い る 場 合 , 各 々 を 別 々 の 式 で 取 り 扱 う 。 永 久 磁 石 中 の 磁 気 特 性 は(2.14)式 に (2.12)式を適用すると次式となる。
B
M
J
0
J
e 01
rot
(2.15) 続 いて(2.15)式に(2.8)式を代入すると,永久磁石を含む場の基礎方程式は次式で表さ れ る 。
rot
A
J
0
J
e
J
mrot
(2.16)M
J
m
0rot
(2.17) こ こ で0 は真空の磁気抵抗率, Jmは 等価 磁化 電流 密 度と す る。 2 . 2. 2 有 限要 素 法に よ る定 式 化 ( 1 ) ガ ラー キン 法 によ る 残差 方 程式 前 項 の(2.16)式 に 後 述 す る 要 素 の 辺 で 定 義 さ れ る 磁 気 ベ ク ト ル ポ テ ン シ ャ ル Aの 補 間 関 数Niを 重み 関数 と して ,ガラ ー キン 法(12)を 適用 す ると 渦 電流 およ び 永久 磁 石を 考 慮 し た動 磁 場解 析の た めの 残 差Goiは 次式 で 定義さ れ 零と な る。0
0
li j i jei jmi oiG
G
G
G
G
(2.18) た だし ,(2.18)式右辺の各項は以下のようになる。
V i lidV
G
N
rot
rot
A
(2.19)
c V i i jdV
G
0N
J
0 (2.20)
e V i jeit
dV
G
N
A
grad
(2.21)
m V i jmidV
G
N
0rot
M
(2.22) こ こ でVは全領域,Vcは巻 線 の領 域,Veは 渦電 流が 流 れる 導 体の 領域 お よびVmは 永 久磁 石 の 領域 と する 。(2.19)式において磁気ベクトルポテンシャル Aは離散化の過程で要素 内 で は一 次 近似 され る ため ,回 転を2回適用すると恒等的に零となることから,このま ま の 形で は 離散 化で き ない 。 そこ で 次式 のベ ク トル 公 式お よ びガ ウス の 発散 定 理を 用 い て 変形 す る。
u
ν
u
ν
ν
u
rot
rot
div
(2.23)
S VdS
dV
u
n
u
div
(2.24)- 7 -
u
ν
w
u
ν
w
(2.25) (2.19)式にベクトル公式およびガウスの発散定理を適用すると次式が得られる。
S i V i V iA
dV
N
A
dV
N
A
n
dS
N
rot
rot
rot
rot
rot
(2.26)こ こ でnは 微 小 面 積 dSの外 向 き の 単 位 法 線ベ ク トル で あ る 。 (2.26)式 に おい て 右 辺 第 2 項 は 境界 積 分項 で固 定 境界 上 ではNi=0となり,磁界の強さ Hが境界面に垂直な場合は n ×H=0となるた め結局零とな る。したが って通常この 項を零,す なわち磁束は 境界に 対 し て平 行 また は垂 直 にし か 通ら な い も のと し て解 析 する 。 次 に(2.22)式において永久磁石の磁化 Mは要素内で一定として与えるために,その回 転 量 は恒 等 的に 零と な る。そ こ で(2.22)式にもベクトル公式およびガウスの発散定理を 適 用 する と 次式 が得 ら れる 。
m m m S i V i V iM
dV
N
M
dV
N
M
n
dS
N
0rot
rot
0
0 (2.27) (2.27)式の境界積分項も零として,境界上の磁化 Mは 垂 直ま たは 平 行であ る とす る 。 以 上 よ り 渦 電 流 お よ び 永 久 磁 石 を 考 慮 し た 動 磁 場 解 析 の た め の 残 差Goiは 次 式 で 定 義 さ れる 。 なお ,境 界 積分 項 も示 す 。
m m e c S i V i V i V i S i V i oidS
dV
dV
t
dV
dS
dV
G
n
M
N
M
N
A
N
J
N
n
A
N
A
N
0 0 0rot
grad
rot
rot
rot
(2.28) と こ ろで(2.28)式において電気スカラポテンシャルも 未 知変 数 とし た場 合 , 未知 変 数 はAの3成分との 合 計4変数となるが,(2.28)式の残差 Goiに は3成分の式しかないため 方 程 式 の 数 が 未 知 変 数 よ り も 少 な い こ と に な る 。 そ こ で 渦 電 流 密 度Jeに 対 し て 次 式 に 示 す 電荷 保 存則 の式 を 導入 す る。0
div
J
e
(2.29) (2.13)式と(2.29)式より,後述する要素の節点で定義される電気スカラポテンシャル の 補 間 関 数Niを 重 み 関 数 と し て ガ ラ ー キ ン 法 を 適 用 す る と 残 差Gdiは 次 式 で 定 義 さ れ 零 と なる 。0
div
e V e i diN
dV
G
J
(2.30) ま た ,(2.30)式にベクトル公式およびガウスの発散定理を適用す ると次式が得られる。
e e e V e i S e i V e idV
N
dS
N
dV
N
div
J
J
n
grad
J
(2.31) (2.31)式より渦電流が境界面に対して平行に流れる場合には,上式の右辺第一項の境- 8 - 界 積 分項 は 零に なる 。 また , 境界 面 に対 して 垂 直な 場 合, 磁 気ベ クト ル ポテ ン シャ ル Aと電気スカラポテンシャルは 固 定境 界と な るた め 零に な る 。し た がって こ の項 を 零, す な わち 渦 電流 は境 界 に対 し て平 行 また は垂 直 にし か 流れ な いも のと す る。 以 上よ り 磁 気 ベ ク ト ル ポ テ ン シ ャ ルAと 電 気 ス カ ラ ポ テ ン シ ャ ルを 未 知 数 と す る , い わ ゆ る A- 法を用いる場合, (2.28)式と(2.31)式の連立方程式を解くことで磁 束分布および渦 電 流 分布 を 解析 する こ とが 可 能と な る。 ( 2 ) 境 界条 件 図2.1に 示 すよ うな 透磁 率が 異 な る2つ の領域 間 の境 界 面上 の 磁 束 密 度B, 磁 界の 強 さHの連 続 性を 考 察する 。 ただ し ,境 界 面はx-y平 面 に 平 行 であ る と仮定 す る。 電 磁 界 にお い て磁 界が 満 足す べ き物 理 的な 境界 条 件は 次 式で 表 され る。
n
B
n
B
1
2
(2.32)n
H
n
H
1
2
(2.33) こ こ でB1お よ びB2は それぞ れ 領域1および領域 2の磁束密度,H1お よびH2はそ れ ぞれ 領 域1および領域 2の磁界の強さ,nは境界面 の単位法線ベクトルとする。(2.32)式は境 界 面 に 対 す る 磁 束 密 度Bの法線方向成分の連続条件,(2.33)式は磁界の強さ Hの接線方 向 成 分の 連 続条 件を 示 して い る。(2.33)式の磁界の強さ Hの接線方向成分の連続条件は, 前 述 の(2.26)式の右辺第 2項の境界積分項を零とすることで満たすことができる。また, 磁 束 密 度Bは 磁 気 ベ ク ト ル ポ テ ン シ ャ ル Aを 用 い て (2.8)式 で 表 さ れ る こ と か ら 磁 束 密 度Bの法線方向成分の連続性は,磁気ベクトルポテンシャル Aの連続条件を考えればよ い こ とに な る。(2.32)式と (2.8)式より上のAの分布に関して次式が得られる。y
A
x
A
y
A
x
A
y x y x
1 1 2 2 (2.34) (2.34)式 より上 でに 平 行 な2成分 AxとAyの み が 連 続 で あ れ ば 磁 束 密 度Bの 法 線 方向 成 分 の連 続 性が 満足 さ れる こ とを 示 して いる 。 次 に 有 限 要素 法 で は 有限 の 領 域 を 扱う こ と か ら(2.32)式および (2.33)式を満足する解 析 領 域の 取 り方 につ い て検 討 する 。(2.32)式および(2.33)式において領域 1を解析領域の 内 部 ,領域2を解析領域の外部とすれば,境界面上では境界面に沿った磁気ベクトルポ テ ン シャ ルAのみで磁束密度 Bおよび磁界の強さHが表される。境界面上の磁気ベクト ル ポ テン シ ャルAが零以外であれば,(2.8)式より磁束密度 Bは境界面に垂直になること が わ か る 。 こ れ よ り 通 常 境 界 面 上 の 磁 気 ベ ク ト ル ポ テ ン シ ャ ルAを未 知数と する と磁 束 密 度Bは境界面に対して必ず垂直となり,このような境界を自然境界と呼ぶ。また, 解 析 領 域 を 十 分 に 広 く 取 る と 磁 束 密 度Bは 近 似 的に 零 と な り (2.32)式お よび (2.33)式を 満 足 す る こ と が わ か る 。 こ の よ う な 境 界 を 遠 方 境 界 と 呼 ぶ 。 一 方 , 磁 束 密 度Bが 境 界 面 に 対 し て 平 行 な 場 合 , 境 界 面 に 沿 っ た 磁 気 ベ ク ト ル ポ テ ン シ ャ ルAは一定 値で なけ れ ば なら な い。 この よ うな 境 界を 固 定境 界と 呼 ぶ。 な お, 遠 方境 界に お いて も 境界 面- 9 - に 沿 っ た 磁 気 ベ ク ト ル ポ テ ン シ ャ ルAは 零と して与 える ため 遠方 境界 は固定 境界 の一 種 で ある こ とが わか る 。 続 いて 渦 電流 密度Jeと電 界 の強 さEの境界条件について検討する。磁界と同様に渦電 流 密 度Jeと 電 界の 強さEが満足すべき物理的な境界条件は次式で表される。
n
J
n
J
e1
e2
(2.35)n
E
n
E
1
2
(2.36) こ こ でJe1およ びJe2はそれ ぞ れ領 域1および領域 2の渦電流密度,E1お よびE2は そ れ ぞ れ 領 域1および領域 2の電界の強さとする。(2.35)式は境界面に対する渦電流密度 Jeの法 線 方 向 成分 の 連続 条件 ,(2.36)式は電 界の強さ Eの接線方向成分の連続条件を示している。 (2.35)式の渦電流密度 Jeの 法 線方 向 成分 の連 続 条件 は,前 述の(2.31)式の右辺第 1項の境 界 積 分 項 を 零 と す る こ と で 満 た す こ と が で き る 。 ま た , 電 界 の 強 さEは磁気 ベク トル ポ テ ン シ ャ ルAと 電 気 ス カ ラ ポ テ ン シ ャ ル を 用 い て (2.11) 式 で 表 さ れ る こ と か ら (2.36)式より上 のAと の分布に関して次式が得られる。
y
t
A
y
t
A
t
x
A
x
t
A
y y x x 2 2 1 1 2 2 1 1
(2.37) (2.37)式 よ り上 で に 平 行 な 2成 分 AxとAyお よ び が 連 続 で あ れ ば 電 界 の 強 さ Eの 接 線 方向 成 分の 連続 性 が満 足 され る こと を 示 し てい る 。 次 に領 域1を解析領域内部,領域 2を解析領域の外部とする有限領域について検討す る 。 渦 電 流 密 度Jeは(2.13)式より磁気ベクトルポテンシャル Aと電気スカラポテンシャ ル から表されるが,Aは磁束密度 Bの境界条件により決定されるため渦電流密度 Jeの 境 界 条件 は を用いて指定することができる。まず,境界面上の電気スカラポテンシ ャ ル を未知数とする,いわゆる自然境界とすると (2.31)式の右辺第一項を零とするこ と か ら , 渦 電 流 密 度Jeは 境 界 面 に 対 し て 平 行 と な る 。 ま た , 境 界 面 に 沿 っ た 電 気 ス カ ラ ポ テ ン シ ャ ル を零と する,いわゆる固定境界とすると渦電流密度 Jeは 境 界 面 に 対 し て 垂直 と なる 。Fig. 2.1 Boundary between two regions. Region1 Region2 n B1, H1, Je1, E1 B1, H1, Je1, E1 Boundary
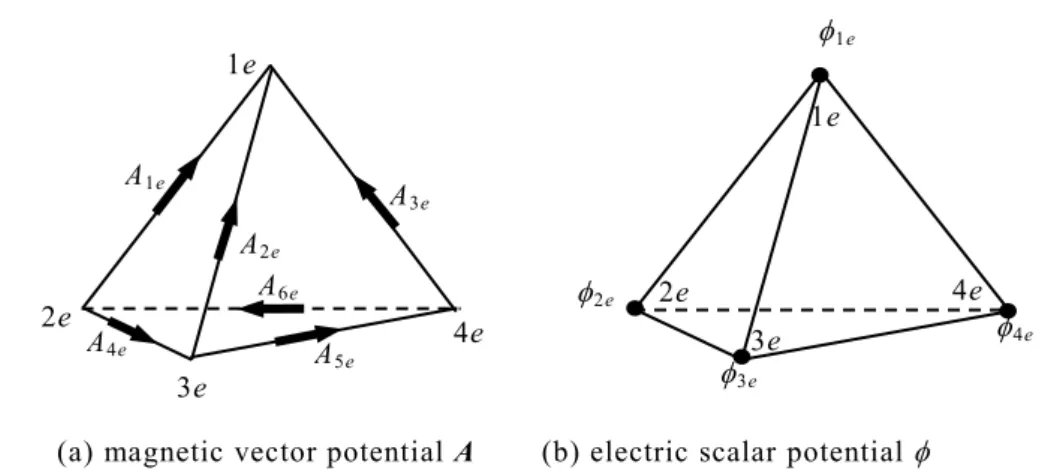
- 10 - 1e 2e 3e 4e A1e A4e A5e A3e A2e A6e ( 3 ) 未 知数 の定 義 方法 未 知 変 数 に は 磁 気 ベ ク ト ル ポ テ ン シ ャ ルAお よ び 電 気 ス カ ラ ポ テ ン シ ャ ルを 用 い る 。 図2.2に磁気ベクトルポテンシャル Aの未知変数の定義方法を示す。図中の矢印が 未 知 変数 を 表す 。従 来 の節 点 要素 で は図2.2(a)に示すように各節点における磁気ベクト ル ポ テン シ ャル のx,yおよび z方向成分を未知数とする。したがって,要素の境界面上 で は 磁気 ベ クト ルポ テ ンシ ャ ルのx,yおよびz方向の全成分が連続となる。しかしなが ら ,前 節 の(2.34)式より節点要素法における Aの全成分の連続性は本来不要であり,接 線 方 向 成 分 の み の 連 続 性 で 磁 束 密 度Bお よ び 磁 界 の 強 さ Hの 連 続 性 を 満 た し た 解 析 が で き る 。そ こ で辺 上の 磁気 ベ クト ル ポテ ンシ ャ ルを 未 知数 と する 辺要 素 を通 常 用い る 。 辺 要 素に お いて は境 界 面上 で 定義 さ れる 未知 変 数が 境 界面 に 沿っ た成 分 のみ で ある こ と か ら, 先 に述 べた 境 界条 件 を自 然 に満 たす こ とが で きる 。 一方 ,電 気 スカ ラ ポテ ン シ ャ ルに つ い て は , 未 知 数 を 節 点 上 で 定 義 す る 。 こ の と き , 要 素 の 境 界 面 上 で は , 電 気 スカ ラ ポテ ンシ ャ ルの 連 続 性 が保 証さ れ る。 以 上 よ り 一 次 四 面 体 辺 要 素 お よ び 一 次 三 角 柱 辺 要 素 の 未 知 変 数 は 図2.3お よ び 図 2.4 の よ うに 定 義す る。
(a) nodal element (b) edge element Fig. 2.2 Definition of unknown variables.
Az1e Ay1e Ax1e 1 2 3 4e
- 11 - 1e 2e 3e 4e A1e A4e A5e A3e A2e A6e
(a) magnetic vector potential A (b) electric scalar potential
Fig. 2.3 Definition of unknown variables in first -order tetrahedral edge elements.
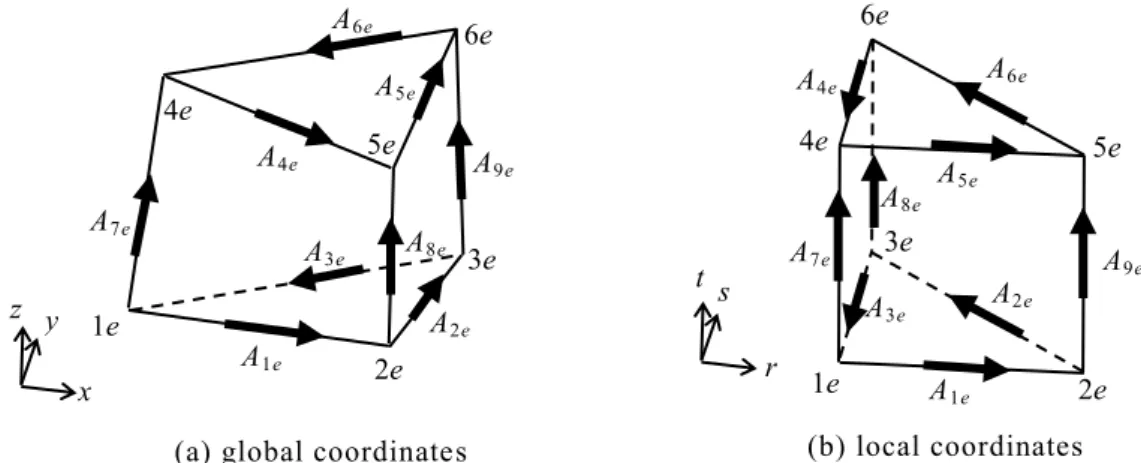
(a) magnetic vector potential A (b) electric scalar potential Fig. 2.4 Definition of unknown variables in first-order prismatic edge elements.
1e 2e 3e 4e 1e 2e 3e 4e 1 e 2e 3e 4e 5e 6e A6e A7e A4e A5e A2e A1e A3e A8e A9e 1 e 2e 3e 4e 5e 6e 1e 2e 3e 4e 5e 6e
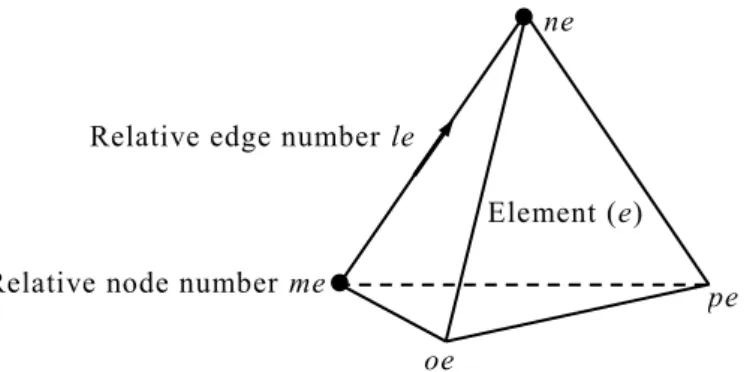
- 12 - ( 4 ) 一 次四 面体 辺 要素 に よる 離 散化 ( a) 補 間関 数 (2.28)式を一次四面体辺要素により離散化する際に,図 2.5に示す要素(e)において相 対 辺 番 号leに対応する相 対節点番号 me,neを定義 する。未知変数は図中に示す相対節 点 番 号meから相対節点番号 neへ向かう方向を正とする。このとき要素の辺で定義され る 磁 気ベ ク トル ポテ ン シャ ルAの補間関数 Nleは 次式 で 定義 さ れる(7)。 me ne ne me le
grad
grad
N
(2.38) こ こ でmeお よ びneは そ れ ぞ れ 相 対 節 点 番 号me, neに 対応 する 体 積座 標で あ る。 体 積 座 標 とは 相 対座 標の 一 種で 図2.6に示すように,相対節点番号 meに相対する面を底面と す る 斜線 部 の四 面体 の 体積Vmeと 要 素(e)の体積比で定義され次式で表される。
a
b
x
c
y
d
z
V
e me me me me me
6
1
(2.39) Veは 要 素(e)の体積で,次式で表される。
me
ne
oe pe
oe
pe ne
pe
ne oe
me me ex
y
z
z
y
z
z
y
z
z
V
4 11
6
1
(2.40) 式 中 のme,ne,oe,peは循環する相対節点番号を示し,例えば me=2の時ne,oe,peは そ れ ぞれ3,4,1に対応する。また, ame,bme,cme,dmeは 次 式 で表 され る。
ne
pe oe oe pe
oe
ne pe pe ne
pe
oe ne ne oe
me mex
y
z
y
z
x
y
z
y
z
x
y
z
y
z
a
1
(2.41)
ne
oe pe
oe
pe ne
pe
ne oe
me mey
z
z
y
z
z
y
z
z
b
1
(2.42)
ne
oe pe
oe
pe ne
pe
ne oe
me mez
x
x
z
x
x
z
x
x
c
1
(2.43)
ne
oe pe
oe
pe ne
pe
ne oe
me mex
y
y
x
y
y
x
y
y
d
1
(2.44) (2.39)式を( 2.38)式に代入すると次式が得られる。
k
j
i
y
d
c
d
c
x
d
b
d
b
d
a
d
a
z
c
d
c
d
x
c
b
c
b
c
a
c
a
z
b
d
b
d
y
b
c
b
c
b
a
b
a
V
N
me ne ne me me ne ne me me ne ne me me ne ne me me ne ne me me ne ne me me ne ne me me ne ne me me ne ne me e le
36
1
2 (2.45)こ こ でi,jおよびkはそれぞれ x,yおよびz方向の単位ベクトルである。辺 leは複数個の
要 素 に 共 有 さ れ て い る が , い ず れ の 要 素 で 求 め た 辺leの補間関数 を同一にする ため に
は ,辺leの両端の節点 meおよびneの絶対節点番号nmeお よ びnneが ,nme>nneと な るよ う に
相 対 節点 番 号を つけ れ ばよ い こと に なる 。要 素(e)内における磁気ベクトルポテンシャ ルA(e)は (2.45)式のベク トル補間関数 Nleを 用い て 次式 で 表さ れる 。
- 13 -
6 1 le le le eN
A
A
(2.46) こ こ でAleは要 素(e)の相対辺番号 leに沿った未知変数である。また,その単位はベクト ル 補 間関 数Nleの 単 位がm-1で あ る こと か らWbの次元を有する。すなわち,Aleと い う 未 知 変 数は 磁 気ベ クト ル ポテ ン シャ ル の単 位Wb/mよりも長さの次元だけ高く,ラプラス 問 題 など の 既知 の境 界 値を 与 える と きに は, 磁 気ベ ク トル ポ テン シャ ル 値に そ の辺 の 長 さ をか け たも のを 未 知変 数Aleに 与え な けれ ばなら な いの で 注意 を要 す る。以 上 より (2.45)式と(2.46)式を用いるこ とで, (2.28)式を離散化することができる。Fig. 2.5 Relationship between edge and node in tetrahedral edge element.
Fig. 2.6 Volume coordinates of relative node number me.
渦 電流 の 電荷 保存 則 の(2.31)式を離散化する際に,要素の節点で定義される電気スカ ラ ポ テン シ ャル の補間関数 Nneは 次 式 で定 義 され る 。
a
b
x
c
y
d
z
V
N
ne ne ne ne e ne
6
1
(2.47) こ れよ り 要素(e)内における電気スカラポテンシャル( e)は(2.47)式 を 用い て 次 式 と なる 。
4 1 ne ne ne eN
(2.48) 以 上よ り(2.47)式と(2.48)式を用いることで, (2.31)式を離散化することができる。 neRelative node number me Relative edge number le
Element (e) oe pe oe pe Vme Ve me ne
- 14 - ( b) 積 分公 式 (2.45)式,(2.47)式に示した通り,四面体要素では辺要素補間関数の各成分および節 点 要 素 補 間 関 数 は ,x,y,zの一次関数になる。よって,(2.28)式第1項,第 3項,第 4項, 第5項および (2.31)式右辺第 2項の体積積分は高々二次関数の体積積分となる。 本 稿で は ,こ れら の 体積 積 分に は 以下 の積 分 公式 を 用い 計 算す る。
4 1 2 2 4 1 4 1 2 2 4 1 4 1 2 2 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 2 2 220
1
,
20
1
,
20
1
,
20
1
,
20
1
,
20
1
,
4
1
,
4
1
,
4
1
,
le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le le e Vz
z
zz
y
y
yy
x
x
xx
x
z
x
z
zx
z
y
z
y
yz
y
x
y
x
xy
z
z
y
y
x
x
zz
j
yy
i
xx
h
zx
g
yz
f
xy
e
z
d
y
c
x
b
a
V
dV
jz
iy
hx
gzx
fyz
exy
dz
cy
bx
a
(2.49)- 15 - ( 5 ) 一 次三 角柱 辺 要素 に よる 離 散化 ( a) 補 間関 数 (2.28)式を一次三角柱辺要素により離散化する際に,図 2.7(a)に示す要素 (e)において 相 対 辺 番 号leに対応する 相対節点番号 me,neを定 義する。未知変数は図中に示す相対 節 点 番号meから相対節点番号 neへ向かう方向を正とする。このとき要素の辺で定義さ れ る 磁気 ベ クト ルポ テ ンシ ャ ルAの補間関数 Nleは次 式 で定 義 され る(9)。
7
9
2
1
)
,
,
(
6
1
)
,
,
(
l
t
L
t
s
r
l
N
L
N
L
t
s
r
ne le ne me me ne leN
N
(2.50) こ こ で,r,s,tは図2.7(b)に示す局所座標系の各成分である。なお, 0≦r, s≦ 1,-1≦t ≦1の範囲 をとる 。meおよ びneは そ れぞ れ 相対節 点 番号me,neに対応する節点補間関 数 ,Lmeお よ びLneは そ れ ぞ れ 相 対 節 点 番 号me, neに 対応 する 面内 補間 関数 であ る。 節 点 補 間関 数 およ び面 内 補間 関 数は そ れぞ れ(2.51)式および (2.52)式で定義される。)
1
(
2
1
)
,
,
(
r
s
t
L
t
t
N
me
i
i (2.51)s
r
s
r
L
i i i i(
,
)
1
2
3 (2.52) ここで,(2.51)式 および(2.52)式 で用 いたパラメータを表2.1に示 す。辺leは複 数 個 の要素 に共 有 されているが,いずれの要 素 で求 めた辺leの補 間 関 数 を同 一 にするためには,辺 leの両 端 の節 点meおよびneの絶 対 節 点 番 号 nmeおよびnneが,nme>nneとなるように相 対 節 点 番 号 をつければよいことになる。要 素(e)内 における磁 気 ベクトルポテンシャルA(e)は(2.50)式 のベクトル補 間関 数Nleを用いて次 式で表される。
6 1 le le le eN
A
A
(2.53) ここでAleは要 素(e)の相 対 辺 番 号 leに沿 った未 知 変 数 である。また,その単 位 はベクトル補 間関 数Nleの単 位がm-1であることからWbの次元を有する。すなわち,Aleという未 知 変数 は磁 気 ベクトルポテンシャルの単 位Wb/mよりも長 さの次 元 だけ高 く,ラプラス問 題 などの既 知 の境 界 値 を与 えるときには,磁 気 ベクトルポテンシャル値 にその辺 の長 さをかけたものを未 知 変 数Ale に与 えなければならないので注 意 を要 する。以 上 より(2.50)式 および(2.53)式 を用 いることで, (2.28)式を離散化することができる。- 16 -
(a) global coordinates (b) local coordinates Fig. 2.7 Relationship between edge and node in prismatic edge element.
Table 2.1 Parameters in interpolation. Node number i 1 i 2 i 3 ti 1 1 -1 -1 -1 2 0 1 0 -1 3 0 0 1 -1 4 1 -1 -1 1 5 0 1 0 1 6 0 0 1 1 渦 電流 の 電荷 保存 則 の(2.31)式を離散化する際に,要素の節点で定義される電気スカ ラ ポ テン シ ャル の補間関数は (2.51)式の節点補間関数で定義される。 こ れよ り 要素(e)内における電気スカラポテンシャル( e)は(2.51)式 を 用い て 次 式 と なる 。
4 1 ne ne ne eN
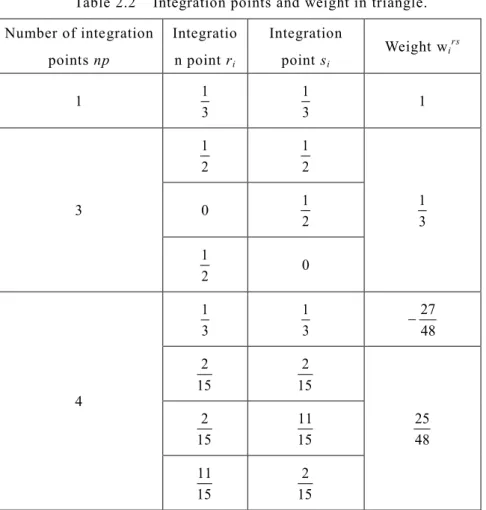
(2.54) 以 上よ り(2.51)式と(2.54)式を用いることで, (2.31)式を離散化することができる。 x y z t s r 1e 2e 3e 4e 5e 6e A9e A7e A8e A6e A4e A5e A1e A3e A2e 1e 2e 3e 4e 5e 6e A6e A7e A4e A5e A2e A1e A3e A8e A9e- 17 - ( b) 数 値積 分 法 三 角柱 辺 要素 では(2.28)式第1項,第3項,第4項,第 5項および (2.31)式右辺第 2項の体 積 積 分を 解 析的 に行 う のは 困 難で あ るの で, こ の積 分 はガ ウ スの 積分(17)を 用 い る。 次 式に 三 角形 面内 の ガウ ス の積 分 を示 す。
|
|
)
,
(
|
|
)
,
(
)
,
(
1 1 0 1 0J
s
r
f
w
drds
J
s
r
f
dxdy
y
x
f
np i i i rs i s
(2.55) 重みwirsと 積 分 点ri,siは 表2.2のように与えられる。 また ,(2.55)式のヤコビ行列 Jは次式で与えられる。
s
y
r
y
s
x
r
x
J
(2.56) 次 式にt 軸方向のガウスの積分を示す。dt
dx
t
f
w
dt
dt
dx
t
f
x
f
np i i t i
1 1 1)
(
)
(
dx
)
(
(2.57) なお, 重 みwitと 積 分 点tiは 表2.3のように与えられる。 三次 元有 限 要素 法で は体 積 積分 と なる が, 三角柱 辺 要素 で はガ ウス の 積分 公 式を 三 次 元 的に 拡 張す る。 関 数の 変 数変 換 と要 素の 座 標系 は 対応 し てい るの で 体積 積 分は 次 式 で 求め ら れる 。
npt l nprs m l m m t l rs mw
f
r
s
t
J
w
drdsdt
J
t
s
r
f
dxdydz
f
dV
z
y
x
f
1 1 1 1 1 0 1 0|
|
)
,
,
(
|
|
)
,
,
(
)
,
,
(
(2.58) こ こ で ,nptは t軸 方 向 の積 分 点 数 , nprsは 三 角 形面 内 の 積 分 定 数 ,w
mrsお よ びw
ltは 重 み ,rm,smお よ びtlは 積分 点 の座 標 ,Jは次式で与えられる,ヤコビ行列であ る。
t
z
s
z
r
z
t
y
s
y
r
y
t
x
s
x
r
x
J
(2.59)- 18 -
Table 2.2 Integration points and weight in triangle.
Table 2.3 Integration points and weight along t-axis.
Number of integration points np Integration point ti Weight wit
1 0 2 2 3 1 1 3 0 9 8 5 3 9 5 Number of integration points np Integratio n point ri Integration point si Weight wirs 1 3 1 3 1 1 3 2 1 2 1 3 1 0 2 1 2 1 0 4 3 1 3 1 48 27 15 2 15 2 48 25 15 2 15 11 15 11 15 2
- 19 - 2 . 2. 3 時 間依 存 場計 算 法 (2.13)式 の時 間 微 分 項で あ る ∂/∂tの 処 理 法 と して は , 差 分 近似 法 と 複 素数 近 似 法 の 2 種 類 ある 。 しか しな が ら, 磁 性体 の 透磁 率の 非 線形 性 を考 慮 する ため に は差 分 近似 法 を 用 いる 必 要が ある 。 なぜ な らば , 複素 数近 似 法で は 磁性 体 の透 磁率 の 時間 的 変化 が 考 慮 でき な いか らで あ る。 そ こで 本 論文 では 時 間微 分 項の 取 り扱 いに は 差分 近 似法 を 適 用 する 。 差 分 近 似 法 は 解 析 する時 間 領 域 を 微 小 時 間 幅tで小刻みに区切り,その区間 内では 現 象 が 直線 的 に変 化す るも の と 仮定 して 微 分方 程式 を 離 散化 してstep-by-step法により 計 算 する 手 法で ある 。 この 直 線の 勾 配の 決定 方 法に よ り前 進 ,後 退, 中 央差 分 法な ど が あ る。 こ の中 から 解 の収 束 性よ り 後退 差分 法 を用 い た。 後 退差 分法 は 時間 微 分項 を 次 式 に示 す よう に時 刻t+tにおける勾配で与える方法である。