修 士 論 文 の 和 文 要 旨 研究科・専攻 大学院 情報理工学研究科 情報・ネットワーク工学専攻専攻 博士前期課程 氏 名 姫野 杏菜 学籍番号 1931122 論 文 題 目 Modified WHCDM に適した AFC 方式の検討 要 旨 ヘリコプター衛星通信では,ローターブレードによる周期的遮断がビット誤り率 (BER: Bit Error Rate) 特性を劣化させる.ウォルシュ・アダマール符号分割多重化(WHCDM:
Walsh-Hadamard Code Division Multiplexing)方式は時間ダイバーシチ効果を持つため,周 期的遮断の影響を低減するのに有効である.WHCDM と明示的時間ダイバーシチ (ETD: Explicit Time Diversity) を組み合わせることで周期的遮断環境下においても優れた BER 特性を達成するが,周波数利用効率が低下する.MWHCDM(Modified WHCDM) は ETD を用いた WHCDM と同等の BER 特性を示す上,ETD を用いるよりも周波数利用効率が 優れている.
しかし, WHCDM においてドップラーシフトによる周波数オフセットが存在すると WH 符号の 直交性が崩れてコード間干渉(ICI:Inter-Code Interference)が生じ,BER 特性が劣化する ため,自動周波数制御 (AFC: Automatic Frequency Control)が必要となる.
先行研究では 1 次変調に BPSK(Binary Phase Shift Keying) を用いる WHCDM に適応可 能な,チップ間の位相回転に基づく AFC 方式 (以下,従来方式 1) が提案された.しかし, この方式は一次変調が M 値 PSK である場合には適用できないため,先行研究 では,多 重分離後の信号振幅分散に基づく AFC 方式 (以下,従来方式 2) が提案された. 従来方式 2 は MWHCDM にも適用可能だが,キャリア周波数オフセットに対しては ETD を 用いた WHCDM よりもロバスト性が低くなり,周波数オフセット検出範囲が狭くなる. そこで本研究では,まず MWHCDM の信号の構造に着目した,キャリア周波数オフセットに 対してよりロバストな MWHCDM 用 AFC 方式(以下,提案方式 1)を検討する. また,従来方式 1 に先行研究の搬送波再生方式の理論を用いた,MWHCDM に適応可能な チップ間の位相回転に基づく AFC 方式(以下,提案方式 2 を検討する. 計算機シミュレーションの結果,提案方式 1 は従来方式 2 と比較して周波数オフセット検出 範囲が拡大し,提案方式 2 では非常に広範囲で動作可能な AFC が実現されたことを確認 した.
令和
2
年度
修士学位論文
Modified WHCDM
に適した
AFC
方式の検討
電気通信大学 情報理工学研究科
博士前期課程 情報・ネットワーク工学専攻
1931122
姫野杏菜
指導教員 小島 年春 准教授
副指導教員 来住 直人 教授
提出 令和
3
年
3
月
25
日
目 次
1 序章 3 1.1 本研究の背景と目的 . . . . 3 1.2 本論文の構成 . . . . 4 2 MWHCDM 5 2.1 序言 . . . . 5 2.2 MWHCDM の原理 . . . . 5 2.3 MWHCDM のシステムモデル . . . . 7 2.4 結言 . . . . 8 3 ヘリコプター衛星通信における時間変動周波数オフセット環境 9 3.1 序言 . . . . 9 3.2 時間変動周波数オフセットのモデリング [12] . . . . 9 3.3 結言 . . . . 10 4 WHCDM 用 AFC 方式 11 4.1 序言 . . . . 11 4.2 AFC の構成 . . . . 11 4.3 従来方式 1 [8] . . . . 13 4.4 従来方式 2 [9] . . . . 15 4.5 結言 . . . . 16 5 MWHCDM 用 AFC 方式 18 5.1 序言 . . . . 18 5.2 提案方式 1 [10] . . . . 18 5.3 提案方式 2 . . . . 21 5.4 結言 . . . . 22 6 計算機シミュレーション 24 6.1 序言 . . . . 246.2 シミュレーション条件 . . . . 24 6.3 提案方式 1 と従来方式 2 の BER 特性の比較 . . . . 25 6.4 提案方式 1 と提案方式 2 の比較 . . . . 26 6.4.1 固定周波数オフセットを与えた場合 . . . . 26 6.4.2 時間変動周波数オフセットを与えた場合 . . . . 27 6.4.3 周波数オフセットをシンボル毎に直接推定する方式 . . . . 30 6.5 結言 . . . . 32 7 結論 33
第
1
章
序章
1.1
本研究の背景と目的
ヘリコプター衛星通信では,ローターブレードによる回線の周期的遮断がビット誤り率 (BER: Bit Error Rate) 特性を劣化させる [1]-[7].ウォルシュ・アダマール符号分割多重化 (WHCDM: Walsh-Hadamard Code Division Multiplexing) 方式は時間ダイバーシチ効果 を持つため,周期的遮断の影響を低減するのに有効である.WHCDM と明示的時間ダイ バーシチ (ETD: Explicit Time Diversity) を組み合わせることで周期的遮断環境下におい ても優れた BER 特性を達成するが [6],周波数利用効率が低下する.MWHCDM(Modified WHCDM) は ETD を用いた WHCDM と同等の BER 特性を示す上,ETD を用いるより も周波数利用効率が優れている [7].しかし,WHCDM においてキャリア周波数オフセット が存在すると WH 符号の直交性が崩れてコード間干渉(ICI:Inter-Code Interference)が 生じ,BER 特性が劣化するため,自動周波数制御 (AFC: Automatic Frequency Control) が必要となる.
先行研究 [8] では 1 次変調に BPSK(Binary Phase Shift Keying) を用いる WHCDM に適応可能な,チップ間の位相回転に基づく AFC 方式 (以下,従来方式 1) が提案され た.しかし,この方式は一次変調が M 値 PSK である場合には適用できないため,先行 研究 [9] では多重分離後の信号振幅分散に基づく AFC 方式 (以下,従来方式 2) が提案 された.従来方式 2 は MWHCDM にも適用可能だが,キャリア周波数オフセットに対し ては ETD を用いた WHCDM よりもロバスト性が低くなり,周波数オフセット検出範囲 が狭くなる. そこで本研究では,まず MWHCDM の信号の構造に着目した,キャリア周波数オフ セットに対してよりロバストな MWHCDM 用 AFC 方式 [10] (以下,提案方式 1) を検討 する.しかし,シンボル単位で処理するこの方式は,従来方式 1 のようにチップ間の位 相差を検出する方式と比較すると検出範囲内の特性は優れているものの,検出範囲は狭 いものとなる.そこで,さらに先行研究 [11] の搬送波再生方式のように提案方式 1 とは 異なる観点から MWHCDM の信号の構造に着目し,MWHCDM に適応可能なチップ間
の位相回転に基づく AFC 方式 (以下,提案方式 2) を検討する. 計算機シミュレーションの結果,提案方式 1 は従来方式 2 と比較して周波数オフセット 検出範囲が拡大し,提案方式 2 では非常に広範囲で動作可能な AFC が実現されたことを 確認した.
1.2
本論文の構成
本論文では,第 2 章で MWHCDM について,第 3 章でヘリコプター衛星通信における 時間変動周波数オフセット環境について説明する.第 4 章で WHCDM 用 AFC 方式に ついて,第 5 章で MWHCDM 用 AFC 方式について説明する.第 6 章にて計算機シミュ レーションを行い,結果について考察を述べる.最後に第 7 章で本論文の結論を述べる.第
2
章
MWHCDM
2.1
序言
本章では,本研究に用いる MWHCDM について述べる.2.2
MWHCDM
の原理
WHCDM は拡散符号にウォルシュ· アダマール (WH: Walsh-Hadamard) 符号を用い た符号分割多重化 (CDM: Code Division Multiplexing) 方式である.MWHCDM とは, BPSK 変調した信号を半分に分割し,後半の信号を π/2 位相回転させることで ICI を低 減する WHCDM である [7].WH 符号は WH 行列の各列からなる直交符号であり,N 次 WH 行列 HNは次式で表される. H1 = [1] (2.1) H2N = [ HN HN HN −HN ] (2.2) 拡散符号 cnを各列に持つ行列 C を以下のように表す. C = [ c1 c2 · · · cN ] (2.3) ここで C = √1 NHN (2.4)とすると,式 (2.2) より H は対称行列であることから,次式が成り立つ. C = CT = √1 NHN (2.5) 多重化前のデータ系列を表す列ベクトル x と,多重分離後データ系列を表す列ベクトル ˆ x を以下のように表す. x = [ x1 x2 · · · xN ] (2.6) ˆ x = [ ˆ x1 xˆ2 · · · ˆxN ] (2.7) 多重化により生成される信号である多重化シンボルを y とすると,x,ˆx と y の関係は以 下のように表される. y = Cx = √1 NHNx (2.8) ˆ x = CTy = √1 NHNy = (C TC)x (2.9) 式 (2.8), (2.9) に示す変換は,WH 行列を用いた直交変換であるウォルシュ· アダマール変 換 (WHT: Walsh-Hadamard Transform) である.CTC = I N の時, ˆx = x が成立する. WH 符号の直交性により直列の送信信号を WHT によって多重化・多重分離することで, 伝送速度を保ったまま信号長を遮断継続時間より長くすることができる.これにより周 期的遮断の影響が軽減され,BER 特性が改善される.
2.3
MWHCDM
のシステムモデル
Information data BPSK modulator WHT Transmitted signal ai bi S si j B� S / P P / S B� Receivedsignal WHT Coherentdetector Recieveddata
ri S R b^i a^i / P P / S �j B� B� ^ ^ 図 2.1: MWHCDM の構成 図 2.1 に MWHCDM の構成を示す.以下多重数を N とする.図 2.1 において,送信 データ ai ∈ {0, 1} から BPSK 変調により一次変調信号 biを次式により生成する.Ebは 1 ビット当たりの信号エネルギーである. bi = √ Ebcos aiπ (2.10) 一次変調信号 biが直並列変換されることにより生じる一次変調シンボル B0, B1はそれぞ れ次式のように表される. B0 = [ b1 b2 · · · bN/2 ] B1 = [ bN/2+1 bN/2+2 · · · bN ] (2.11) B0, B1を WHT することで得た送信シンボル S は次式のようになる. S = √1 NHN [ B0 jB1 ] (2.12) 送信シンボル S の要素を送信信号 siとし,次式のように表す. S = [ s1 s2 · · · sN ] (2.13) 同様に,受信シンボル R の要素を受信信号 riとし,次式のように表す. R = [ r1 r2 · · · rN ] (2.14)
受信シンボル R を WHT することで得た多重分離シンボル ˆB0, ˆB1は次式のようになる. [ ˆ B0 ˆ B1 ] = √1 NHNR (2.15) 多重分離シンボル ˆB0,−j ˆB1を直並列変換し,得られた信号 ˆbiを同期検波することで受 信データ ˆai ∈ {0, 1} が得られる.
2.4
結言
本章では,本研究の基礎となる MWHCDM の原理,変調,復調について述べた.次に ヘリコプター衛星通信における時間変動周波数オフセット環境について説明する.第
3
章
ヘリコプター衛星通信における時間変動
周波数オフセット環境
3.1
序言
ヘリコプター衛星通信ではヘリコプターが移動しながら通信を行うため,キャリア周 波数の変動が問題となる.ヘリコプターは旋回や上昇・下降といった加速度運動を行う ことも多いため,ドップラーシフトによる周波数オフセットは一定ではなく時間変動す る.本章ではその解説を行い,シミュレーションを行う上で必要となる値の設定を示す.3.2
時間変動周波数オフセットのモデリング
[12]
周波数オフセットの変動具合はヘリコプターの移動の仕方によって決まる.本研究で は時間変動周波数オフセットを与える場合,周波数オフセットが最大となる状態と,そ の時間変化率の絶対値が最大となる状態の両者を含めた,以下の飛行状況を想定する. 1. 衛星方向に最高速度で飛行する (すなわち周波数オフセット最大) 状態から減速 (負の 加速) を開始する. 2. 徐々に負の加速度の絶対値を増し,絶対値が最大 (すなわち周波数変化率の絶対値も 最大) の状態に達した後,徐々に負の加速度の絶対値を減ずる. 3. 負の加速度の絶対値を 0 まで減じつつ静止状態 (すなわち周波数オフセットなし) に 達した後,加速を開始する. 4. 徐々に加速度を増し,最大加速度 (すなわち周波数変化率最大) に達した後,徐々に 加速度を減ずる. 5. 加速度を 0 まで減しつつ最高速度での飛行に戻る.このような飛行状況下での周波数オフセットの変動推移を,最大ドップラー周波数 fD, 変動周期 TP で正弦波状に変動する周波数オフセット f f = fDcos2 π Tp t (3.1) として与えることとし,図 3.1 に示す.ここで,最大ドップラー周波数 fD及び変動周期 fD Tp/ � Tp/ � �Tp/ � Tp Frequency Time 図 3.1: 時間変動周波数オフセットのモデル TP は,ヘリコプターの最高速度を V ,キャリア周波数を fC,光速を c,ヘリコプターの 加速度の最大絶対値を A として,次の通りに設定する. fD = V cfc (3.2) TP = V Aπ (3.3)
3.3
結言
本章ではヘリコプター衛星通信における時間変動周波数オフセットのモデル化及び数 式化に関して解説した.次章では WHCDM 用 AFC 方式について説明する.第
4
章
WHCDM
用
AFC
方式
4.1
序言
本章では,WHCDM 用 AFC 方式について述べる.まず,本研究で検討する AFC につ いて説明する.次に,先行研究である 2 種類の方式ついて説明する.4.2
AFC
の構成
本研究で検討する AFC を図 4.1 に示す.FED
Offset removed
exp(�j )
Digital VCO
T
c�
~LF
Received
signal
r
ir
iE
�
isignal
�
i 図 4.1: AFC の構成 受信信号 ri にデジタル電圧制御発振器 (VCO:Voltage-controlled oscillator) から生成 された周波数補償信号 γiを乗算することでオフセット除去信号 ˜riを得て,それを基に周波数誤差検出器 (FED:Frequency Error Detector) によって周波数誤差信号 E が算出さ れる.AFC の性能はこの周波数誤差信号の特性に依存する.ループフィルタ (LF:Loop
Filter) では周波数誤差信号 E が平滑化される.VCO は次のように周波数補償信号 γiを 生成する。 γi = exp(−jϕi) (4.1) この AFC を用いた受信機の構成を図 4.2 に示す.回線上において周期的遮断とドップ ラーシフトによる周波数オフセット ∆f が発生する. 受信信号は,この周期的遮断と周 波数オフセットを受けた後に,片側雑音電力密度 N0の加法性白色ガウス雑音(AWGN:
Additive White Gaussian Noise) niが加えられる.受信信号 riは,チップ間隔を Tcとす
ると,
ri = siexp(j2π∆f Tci) + ni (4.2)
と表される.AFC により周波数オフセット ∆f の影響を除去し,オフセット除去信号 ˜ri
を得る.その後は MWHCDM の受信側と同様である.
Received
signal WHT Coherentdetector Recieveddata
ri R bi ai AFC r~i ^ ^ S / P P / S �j D� D� 図 4.2: 受信機の構成
4.3
従来方式
1 [8]
従来方式 1 は,一次変調が BPSK の場合に適応可能な,チップ間の位相差を用いた方 式である.WHT は加減算のみで処理を行うため,一次変調が BPSK の WHCDM の場合 変調信号は実数成分のみとなる.二逓倍することで多重分離前においても変調成分を取 り除くことができ,チップ間の位相差推定が可能である. 周波数オフセットを受けた i 番 目の受信信号を ri,AWGN を niとすると,ri, ri − 1は次式で表せる. ri = siexp(jψi+ j2π∆f iTc) + ni ri−1 = si−1exp{jψi−1+ j2π∆f (i− 1)Tc} + ni−1 (4.3) ただし,ψiは多重後の信号点の位相,∆f は周波数オフセット,Tcはチップ間隔とする. 受信信号の集合平均は,E[ri] = siexp(jψi + j2π∆f iTc) + E[ni] = siexp(jψi+ j2π∆f iTc) (4.4)
のように表される.ri − 1の共役をとり riと乗算すると,AWGN は独立であることから
次のようになる.
E[ri· r∗i−1] = E[ri]E[ri∗−1]
= sis∗i−1exp{j(ψi− ψi−1) + j2π∆f Tc} (4.5) しかし, この場合 sis∗i−1と (ψi − ψi−1) が残ってしまうため正しく周波数誤差を検出する ことができない. ここで,ψiの取り得る位相について考える. 多重前の信号点の位相は BPSK 変調であることから [0, π] である. WHT は実数のみによる加減算しか行わないため 多重後の信号点の位相 ψiも{ψi} ∈ {0, π} となり,{2(ψi− ψi−1)} ∈ {±2π, 0} = {0}(mod 2π) となる. 式 (5.11) を 2 乗した値 εiの集合平均は,
E[εi] = E[ri· r∗i−1]E[ri· r∗i−1]
=|si|2|si−1|2exp{j2(ψi− ψi−1) + j4π∆f Tc} =|si|2|si−1|2exp(j4π∆f Tc) (4.6) となる.これより、次式の関係を得る. 1 4πarg E[εi] = ∆f Tc (4.7)
よって、次式の E を正規化周波数オフセット ∆f Tcの推定値とすることができる. E = 1 4π N ∑ i=2 εi (4.8) この原理を FED 構成に適用すると図 4.3 のようになる.
T
c*
( )
2 �i �arg( )
E
Received
signal
r
i�
��
�
�
i i=2 N 図 4.3: 従来方式 1 の FED 構成 従来方式 1 の周波数誤差信号を図 4.4 に示す.このように,−0.25 ≤ ∆fTc≤ 0.25 と広 範囲の FED 動作範囲を実現している. −���� −��� −���� −��� −���� � ���� ��� ���� ��� ���� −��� −��� −��� � ��� ��� ���Normalized error signal
Normalized frequency offset �fTc 図 4.4: 従来方式 1 の周波数誤差信号
4.4
従来方式
2 [9]
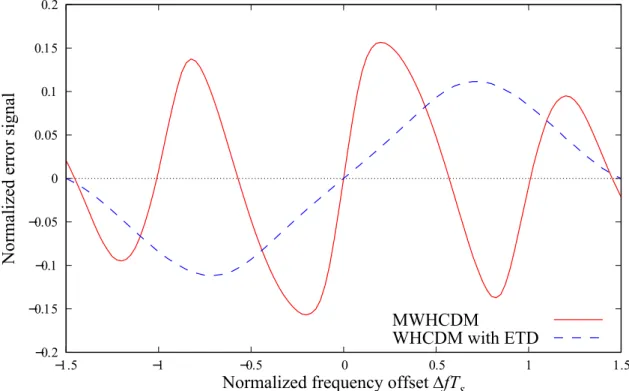
ri exp( j ���iTc) S/P S/P rUi RU BU RL BL �L� rLi E � Offset removed signal � ~ Variance Amplitude � �U� Frequency error signal ^ ~ ^ ~ Variance Amplitude WHT N WHT N 図 4.5: 従来方式 2 の FED 構成 従来方式 2 は,一次変調が M 値 PSK の場合に適応可能な多重分離後の信号の振幅分散 を用いた方式である.WHCDM では 1 次変調が PSK の場合,受信機における多重分離信 号は均一な信号振幅を持つ.しかし,周波数オフセットによって ICI が生じ,多重分離が 不完全なものとなる. 周波数オフセット ∆f の掛かった受信信号を多重分離すると,そ の信号振幅分散は周波数オフセットがない時の分散値 0 を中心に U 字となる特性を持つ. 図 4.5 における信号処理の流れを説明する.まず,オフセット除去信号 ˜riに周波数ず れ±δ を与え,上側シフトチップを ˜rLi,下側シフトチップを ˜rLiとする.次に,上側シフ トチップ ˜rUiと下側シフトチップ ˜rLi(i = 1, 2,· · · , N) をそれぞれ直並列変換し,以下のよ うに上側シフトシンボル RUと下側シフトシンボル RLを得る. RU = [ ˜ rU 1 r˜U 2 · · · ˜rU N ] RL = [ ˜ rL1 r˜L2 · · · ˜rLN ] (4.9) ここで,k = 0, 1 である.その後,上側シフトシンボル RU,下側シフトシンボル RLを それぞれ WHT プロセッサへ入力し,上側多重分離シンボル ˆBU,下側多重分離シンボル ˆ BLは信号 ˆbiを用いて次式のように表せる. ˆ BU = [ ˆbU 1 ˆbU 2 · · · ˆbU N] ˆ BL= [ ˆb L1 ˆbL2 · · · ˆbLN ] (4.10)そして,ˆbiの信号振幅 Aiを用いて,次式の通り信号振幅の分散値 σU2, σL2 を求める. σ2U = 1 N N ∑ i=1 A2U i− ( 1 N N ∑ i=1 AU i )2 (4.11) σL2 = 1 N N ∑ i=1 A2Li− ( 1 N N ∑ i=1 ALi )2 (4.12) そして,σ2 U, σL2 を用いて次式の通り検出値 E を得る. E = σU2 − σL2 (4.13) このように従来方式 2 では周波数誤差信号 E を 1 シンボルにつき 1 回更新する.この方 式は MWHCDM にも適用可能であるが,MWHCDM のシンボル間隔は係数 2 の ETD を 用いる WHCDM の 2 倍であるため,周波数誤差信号 E の更新回数が半減し,応答性が低 下する. 図 4.6 に MWHCDM と ETD を用いる WHCDM の周波数誤差信号を比較する.これを見 ると,MWHCDM の FED の動作範囲が狭くなっていることが分かる.また,MWHCDM のシンボル間隔を Ts,ETD を用いる WHCDM のシンボル間隔を Ts′とすると,キャリア 周波数オフセット ∆f については ∆f Ts = 2∆f Ts′の関係が成り立つ.これは,シンボル 間隔で正規化されたキャリア周波数オフセットが MWHCDM では 2 倍になることを示し ている.つまり,MWHCDM において,FED で処理するシンボルのシンボル間隔を半分 にすることで,これらの問題を解決することが可能であると推測される.
4.5
結言
本章では,WHCDM 用 AFC 方式及び従来方式について説明した.次章では MWHCDM 用 AFC 方式について説明する.−��� −���� −��� −���� � ���� ��� ���� ��� −��� −� −��� � ��� � ���
Normalized error signal
Normalized frequency offset �fTs MWHCDM
WHCDM with ETD
第
5
章
MWHCDM
用
AFC
方式
5.1
序言
本章では,MWHCDM 用 AFC 方式について,本研究で提案する 2 種類の方式を説明 する.5.2
提案方式
1 [10]
提案方式 1 は,MWHCDM の信号の構造に着目することで従来方式 2 の FED の動作 範囲を広げた方式である.式 (2.2) の WH 行列の構造に注目する.式 (2.2) と (2.12) から, 送信シンボル S は次式のように表される. S = √1 N [ HN/2 HN/2 HN/2 −HN/2 ] [ B0 jB1 ] = √1 NHN/2 [ B0+ jB1 B0− jB1 ] = [ SQ SQ∗ ]T (5.1) ここで, SQ = 1 √ NHN/2(B0+ jB1) (5.2) とする.式 (5.2) より,B0と B1の要素は同じエネルギーの BPSK 信号であることから,サブシンボル SQと SQ∗は一次変調が QPSK (Quaternary Phase-Shift Keying) で多重数
N/2 の WHCDM の多重化シンボルであることがわかる.そして,受信シンボル R も送
信シンボル S と同様の構造を持つ.つまり,MWHCDM では,受信シンボル R を 2 つ の WHCDM シンボルに分割して FED で処理することができる.これにより,周波数誤
差信号 E を 1 シンボルあたり 2 回更新することが可能となり,AFC の応答性を向上させ ることができる.図 5.1 に提案方式 1 における FED の構成を示す.構成は従来方式 2 の FED と同様だが,処理する多重化シンボルの長さが半減したことで,WHT 次数も従来 の半分である N/2 となっている.図 5.1 では,上側シフトチップ ˜rUiと下側シフトチップ ˜ rLiから以下のように上側シフトシンボル RUと下側シフトシンボル RLが生成される. RU = [ ˜ rU kN/2+1 r˜U kN/2+2 · · · ˜rU kN/2+2/N ] RL= [ ˜ rLkN/2+1 ˜rLkN/2+2 · · · ˜rLkN/2+2/N ] (5.3) ここで,k = 0, 1 である.これらが次数 N/2 の WHT により多重分離シンボル ˆBU, ˆBL となり,次式のように表される. ˆ BU = [ ˆb U kN/2+1 ˆbU kN/2+2 · · · ˆbU kN/2+2/N ] ˆ BL = [ ˆb LkN/2+1 ˆbLkN/2+2 · · · ˆbLkN/2+2/N ] (5.4) そして,ˆbiの信号振幅 Aiを用いて,次式の通り信号振幅の分散値 σU2, σL2 を求める. σU2 = 2 N N/2 ∑ i=1 A2U kN/2+i− 2 N N/2 ∑ i=1 AU kN/2+i 2 (5.5) σ2L = 2 N N/2 ∑ i=1 A2LkN/2+i− 2 N N/2 ∑ i=1 ALkN/2+i 2 (5.6) そして,σ2 U, σL2 を用いて次式の通り検出値 E を得る. E = σU2 − σL2 (5.7) ri exp( j ���iTc) S/P S/P rUi RU BU RL BL �L� rLi E � Offset removed signal � ~ Variance Amplitude � �U� Frequency error signal ^ ~ ^ ~ Variance Amplitude WHT N/� WHT N/� 図 5.1: 提案方式 2 の FED 構成
−��� −���� −��� −���� � ���� ��� ���� ��� −��� −� −��� � ��� � ���
Normalized error signal
Normalized frequency offset �fTs Proposed Conventional 図 5.2: 提案方式 1 と従来方式 2 の周波数誤差信号 図 5.2 に MWHCDM における提案方式 1 と従来方式 2 の周波数誤差信号の比較を示す. 図 5.2 より,提案方式 1 では従来方式 2 と比べて FED の動作範囲が 2 倍に拡大しているこ とが分かる.これにより AFC の周波数引き込み範囲も 2 倍に拡大することが予想される.
5.3
提案方式
2
提案方式 2 は,先行研究 [11] の搬送波再生方式のように,提案方式 1 とは異なる観点 から MWHCDM の信号の構造に着目することで,MWHCDM においてもチップ間の位 相差を検出可能にした方式である.式 (2.13), (5.1) より,送信信号 siと si+ N/2 につい て次式が成立する. si+N/2 = s∗i (5.8) 周波数オフセットを受けた場合,受信信号 riは,AWGN を niとすると次式により与え られる. ri = siexp(j2π∆f iTc) + ni (5.9) 受信信号の集合平均は,E[ri] = siexp(jψi + j2π∆f iTc) + E[ni] = siexp(jψi+ j2π∆f iTc) (5.10)
のように表される.riと ri+N/2の積 diの集合平均は,AWGN が独立であることから次の
ようになる.
E[di] = E[ri]E[ri+N/2]
= sisi+N/2exp{j2π∆fTc(2i + N/2)}
=|si|2exp{j2π∆fTc(2i + N/2)}
(5.11)
diと di−1の共役との積を εiとすると,εiの集合平均は次式のようになる.
E[εi] = E[di]E[d∗i−1] =|si|2|si−1|2exp(j4π∆f Tc) (5.12)
これにより変調成分が取り除かれ,二逓倍と同じ効果が得られる.さらに次式により正 規化周波数オフセット ∆f Tcを得ることができる. ∆f Tc= 1 4πarg(εi) (5.13) これより、次式の関係を得る. 1 4πarg E[εi] = ∆f Tc (5.14)
よって、次式の E を正規化周波数オフセット ∆f Tcの推定値とすることができる. E = 1 4π N/2 ∑ i=2 εi (5.15) この原理を FED 構成に適用すると図 5.3 のようになる. Tc * arg( ) � �� E Received signal ri Ts/2 di �i �
�
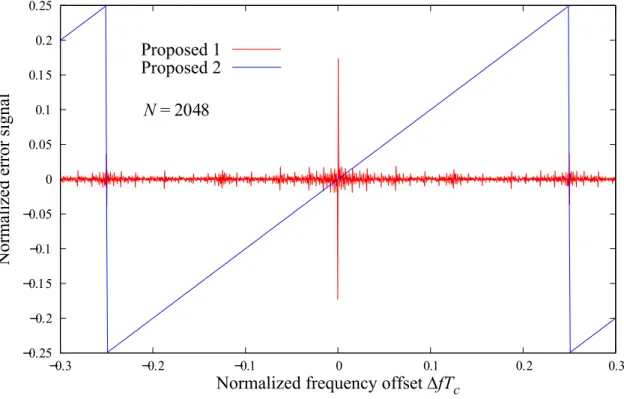
�i i=2 N/2 図 5.3: 提案方式 2 の FED 構成 提案方式 2 の周波数誤差信号を提案方式 1 と比較したものを図 5.4 に示す.提案方式 1 はシンボル単位で処理することから,Ts= N Tcの関係より N が大きくなるほど FED 動 作範囲は狭くなる.一方,チップ単位で処理する提案方式 2 では MWHCDM においても N によらず従来方式 1 のような広範囲で動作する FED を実現することができる.図 5.5 に図 5.4 の ∆f Tc = 0 付近の図を示す.この図より,提案方式 1 は FED 動作範囲は狭い ものの,範囲内における精度が高いことが分かる.このように,提案方式 1 と 2 はトレー ドオフの関係にある.5.4
結言
本章では,提案する MWHCDM 用 AFC 方式について説明した.次章では計算機シミュ レーションの結果を示す.−���� −��� −���� −��� −���� � ���� ��� ���� ��� ���� −��� −��� −��� � ��� ��� ��� N = ����
Normalized error signal
Normalized frequency offset �fTc Proposed 1 Proposed 2 図 5.4: 提案方式 1, 2 の周波数誤差信号 −��� −���� −��� −���� � ���� ��� ���� ��� −����� −������ −����� −������ � ������ ����� ������ ����� N = ����
Normalized error signal
Normalized frequency offset �fTc Proposed 1
Proposed 2
第
6
章
計算機シミュレーション
6.1
序言
本章では,計算機シミュレーションによって提案方式の有効性,ならびに 2 方式の特性 の違いを評価する.6.2
シミュレーション条件
シミュレーション条件を表 6.1 にまとめる. ブレード-アンテナ間の距離D[m] 3.70 ローターブレードの回転数ω[rev/s] 6.45 ブレードの枚数M 4 ブレードの幅W [m] 0.5 最高速度V [m/s] 6.84×10 加速度の最大絶対値A[m/s2] 3.09 周波数オフセット変動周期TP[s] 6.95× 10 最大ドップラー周波数fD[Hz] 2.85×103 伝送速度 [kbps] 64 多重数 N 2048 表 6.1: シミュレーション条件6.3
提案方式
1
と従来方式
2
の
BER
特性の比較
��−� ��−� ��−� ��−� ��−� ��−� ��� −�� −� � � �� �fTs= ��� BER Eb/N�[dB] Proposed Conventional Theory 図 6.1: 提案方式 1 と従来方式 2 の BER 特性 周波数オフセットとして ∆f Ts = 0.8 を与えた場合の提案方式 1 と従来方式 2 の BER 特性を図 6.1 に示す.提案方式 1 において,Eb/N0 >−10dB における各 BER 値は,キャ リア周波数オフセットのない理想的な値と同じである.一方,従来方式 2 では Eb/N0に 関わらずすべての BER が 0.5 となっている.図 5.2 における ∆f Ts = 0.8 は,提案方式 1 では FED の動作範囲内であり,従来方式 2 では周波数誤差信号の極性が反転している. つまり提案方式 1 では周波数引き込みに成功し,従来方式 2 では失敗していると考えら れる.これらの結果より,提案方式 1 は従来方式 2 と比べて BER 特性の劣化を低減する ことができると言える.6.4
提案方式
1
と提案方式
2
の比較
6.4.1
固定周波数オフセットを与えた場合
��−� ��−� ��−� ��−� ��−� ��−� ��� −�� −� � � �� � fTc=��� (� fTs= �����) BER Eb/N�[dB] Proposed 1 Proposed 2 Theory 図 6.2: 固定周波数オフセットを与えた場合の BER 特性 提案方式 1 の周波数オフセット検出範囲外かつ提案方式 2 の検出範囲内である固定周 波数オフセット ∆f Tc = 0.1 を与えた場合の BER 特性を図 6.2 に示す.提案方式 1 では 全ての Eb/N0領域で BER が 0.5 となっている一方,提案方式 2 は Eb/N0 <−1dB では若 干の劣化が見られるものの,ほぼ周波数オフセットのない理想的な値と一致している.6.4.2
時間変動周波数オフセットを与えた場合
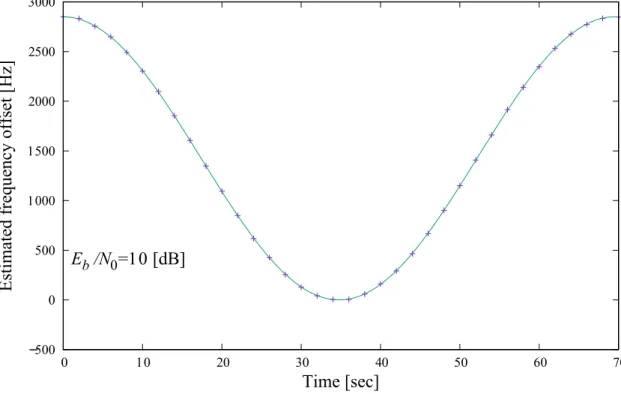
図 6.3, 6.4 に提案方式 1 と提案方式 2 の時間変動周波数オフセット追跡特性をそれぞ れ示す.どちらも追跡には成功しているが,提案方式 2 は提案方式 1 と比較すると追跡の 精度が低い.これは,提案方式 1 は提案方式 2 と比較して FED 動作範囲内における周波 数オフセット検出感度が高く,時間に対するオフセットの変動量が微小な時間変動周波 数オフセットにおいては提案方式 1 の方が優位であるからと言える. さらに,時間変動周波数オフセット追跡特性の精度を定量的に評価するため,図 6.5 に提案方式 1 と提案方式 2 の推定周波数オフセットの RMSE (Root-Mean-Square Error) 特性を示す.提案方式 1 は Eb/N0 = −4dB で大幅に特性が向上する一方,提案方式 2 は Eb/N0が高くなるにつれても緩やかにしか特性が向上していかないことがわかる. −��� � ��� ���� ���� ���� ���� ���� � �� �� �� �� �� �� �� Eb/N�=�� [dB]Estimated frequency offset [Hz]
Time [sec]
−��� � ��� ���� ���� ���� ���� ���� � �� �� �� �� �� �� �� Eb/N�=�� [dB]
Estimated frequency offset [Hz]
Time [sec] 図 6.4: 時間変動周波数オフセット追跡特性 提案方式 2 ��� ��� ��� ��� ��� ��� ��� −�� −� � � �� RMSE [Hz] Eb/N�[dB] Proposed 1 Proposed 2 図 6.5: 時間変動周波数オフセットを与えた場合の RMSE
��−� ��−� ��−� ��−� ��−� ��−� ��� −�� −� � � �� BER Eb/N�[dB] Proposed 1 Proposed 2 Theory 図 6.6: 時間変動周波数オフセットを与えた場合の BER 特性 図 6.6 に時間変動周波数オフセットを与えた場合の提案方式 1 と提案方式 2 の BER 特性 を示す.提案方式 1 は RMSE が大幅に減少する Eb/N0 >−5dB の範囲で周波数オフセッ トのない理想的な値とよく一致している.一方,提案方式 2 は Eb/N0 >−2dB で BER が 僅かに減少しているものの,ほぼ 0.5 に近い値となっており,正しく補正することができ ていないことは明らかである.これらの結果より,提案方式 1 は FED の動作範囲が狭い 代わりに周波数オフセットの時間変動に強い方式であり,提案方式 2 は時間変動に弱い 代わりに FED の動作範囲が広い方式であると言える.
6.4.3
周波数オフセットをシンボル毎に直接推定する方式
Offset removed
exp(�j�� )
~Received
signal
r
ir
kE
signal
FED
Proposed 2
T
c 図 6.7: オープンループ制御型 AFC 提案方式 2 では式 (5.11) より,シンボル毎に ∆f Tcを直接推定することが可能である. よって今まで検討してきたクローズドループ制御型の AFC ではなく,周波数オフセット を直接推定して除去するオープンループ制御型の AFC を用いてシミュレーションを行 う.図 6.7 における信号処理の流れを説明する.提案方式 2 の FED を用いて受信信号 ri(i = 1, 2,· · · , N) から周波数誤差信号 E を生成する.この周波数誤差信号 E は ∆fTcの 推定値であることから,オフセット除去信号 ˜riは E を用いて次式のように生成される. ˜ ri = riexp(−j2πiE) (6.1)図 6.8 に ∆f Tc= 0.1 を与えた場合の引き込み特性を示す.完全に理論値とは一致しな いものの,推定値はいずれも誤差 3% 以内に収まっている.また,周波数オフセットを直 接推定する方式のため,1 シンボル目から与えられた周波数オフセットの値に近い値を算 出することができる. ���� ����� ���� ����� ��� ����� ���� ����� ���� � ��� ��� ��� ��� ���� Eb/N�=�� [dB] N=���� Estimated � fT c Symbols 図 6.8: 引き込み特性 図 6.9 に多重数 N ごとの BER 特性を示す.いずれの値においても,理論値とは大きく 外れ,0.5 に近い値となっている.これは,推定した ∆f Tcによって生じる補正位相の誤 差が時間経過により増大することに由来すると考えられる.例えば多重数 N が 2048 の場 合,最大で ∆f Tcが 2048 倍されることになるため,誤差が僅かでも正しい補正が不可能 となる.よって,図 6.9 からも分かるように,多重数 N が小さくなると特性が改善する. しかし,多重数 N が小さくなるとノイズの影響を受けやすくなるため,著しい改善は見 られない.したがって,この方式を周波数オフセット追跡に適用させるのは現実的ではな い.しかし,この方式では 1 シンボル目から与えられた周波数オフセットに近い値を算 出できるため,そこで提案方式1の FED 動作範囲内まで引き込むことができれば,その 後提案方式 1 に切り替えることで迅速かつ正確な周波数オフセットの検出が期待される.
��−� ��−� ��−� ��−� ��−� ��−� ��� � � � � � �� BER Eb/N�[dB] N=2048 N=128 N=8 Theory 図 6.9: 多重数 N ごとの BER 特性
6.5
結言
本章では,提案方式と従来方式の AFC について計算機シミュレーションを行い,その 結果を示し検討を行った.次章では,本章のシミュレーション結果と検討をまとめ,本 論文の結論を述べる.第
7
章
結論
ヘリコプター衛星通信では,WHCDM がローターブレードによる回線の周期的遮断に 有効である.しかし,WHCDM においてキャリア周波数オフセットが存在すると ICI が 生じて BER 特性が劣化するため,AFC が必要となる.従来方式の AFC は WHCDM を前 提とする方式であり,MWHCDM においては FED 動作範囲が狭くなってしまう.そこで 本研究では MWHCDM に適した AFC 方式を 2 方式提案した.提案方式 1 は MWHCDM 信号の構造に着目し,FED で処理するシンボルのシンボル間隔を半分にする方式であり, 提案方式 2 は提案方式 1 とは異なる観点から MWHCDM 信号の構造に着目し,チップ間 の位相差を検出する方式である.計算機シミュレーションの結果,以下のことが明らか になった. 提案方式 1 は,従来方式 2 と比較すると MWHCDM における FED の動作範囲が拡 大し,BER 特性が向上した. 提案方式 1 は FED の動作範囲が狭い代わりに周波数オフセットの時間変動に対し て強く,提案方式 2 は時間変動に弱い代わりに FED の動作範囲が広い. 提案方式 2 は周波数オフセットの直接推定が可能であり,提案方式 1 と組み合わせ ることで迅速かつ正確な周波数オフセットの検出が期待される. 以上の結果から,提案方式 1 と提案方式 2 はトレードオフの関係にあり,2 方式を組み 合わせることで高性能な MWHCDM 用 AFC の実現が期待できると言える.
謝辞
本研究を行うにあたり,情報通信の基礎からご指導していただきました電気通信大学 情 報理工学研究科 情報 · ネットワーク工学専攻の小島年春准教授に心より感謝申し上げま す.また日頃の研究活動において,ご指導していただきました小島研究室の先輩方,並 びに共に助け合った研究室の皆様に心より感謝申し上げます.
文献
[1] T. Kojima, C. Batzorig, and T. Fujino, “Pre-detection time diversity combining with accurate AFC for helicopter satellite communications,” in Proc. ATC 2008, Hanoi, Vietnam, Oct. 2008, pp. 305–308.
[2] E. Lemos, M. Garc´ıa, A. Vazquez, and S. Garc´ıa, “Measurement, characterization, and modeling of the helicopter satellite communication radio channel,” IEEE Trans. on Antennas and Propag., July 2014, vol. 62, no. 7, pp. 3776–3785.
[3] H. Yuejia and Z. Shenghua, “ A carrier tracking technology under helicopter rotor occlusion, ” in Proc. ICCC 2019, Chengdu, China, Dec. 2019, pp. 1069–1074.
[4] H. Jia, Z. Ni, L. Kuang, and J. Lu,“ Joint occlusion detection and phase estimation algorithm for helicopter satellite communication, ” IEEE Trans. Aero. Elec. Sys., Feb. 2020, vol. 56, no. 1, pp. 687–697.
[5] P. Wang, L. Yin, and J. Lu, “ Efficient helicopter–satellite communication scheme based on check-hybrid LDPC coding, ” Tsinghua Sci. Technol., June 2018, vol. 23, no. 3, pp. 323–332.
[6] T. Kojima and S. Fujiwara, “Performance of Walsh-Hadamard code division multi-plexing in helicopter satellite communications,” in Proc. ATC 2015, Ho Chi Minh City, Vietnam, Oct. 2015, pp. 662–665.
[7] T. Kojima and G. Muto, “A low inter-code interference Walsh-Hadamard code di-vision multiplexing for helicopter satellite communications,” in Proc. ATC 2018, Ho Chi Minh City, Vietnam, Oct. 2018, pp. 1–4.
[8] 土居 勇太郎, “WHCDM 用 AFC 回路の簡略化に関する検討”, 平成 26 年度学士学位 論文,2015 年
[9] T. Kojima, Yuki Kanamaru and Anna Himeno, “An Accurate AFC Scheme for Walsh-Hadamard Code Division Multiplexing,” in Proc. ATC 2019, Hanoi City, Vietnam, Oct. 2019, pp. 79–83.
[10] A. Himeno and T. Kojima, “ An Improved AFC Scheme for Modified Walsh-Hadamard Code Division Multiplexing, ”in Proc. ATC 2020, Nha Trang, Vietnam, Oct. 2020, pp. 79-83. [11] 山村洋太, “初期捕捉機能を備えた Twisted WHCDM 用搬送波再生方式”, 令和元年 年度学士学位論文,2019 年 [12] 小島年春,打木達也,大久保政二,谷口順,“ 時間ダイバーシチを利用したヘリコ プタ衛星通信用高精度 AFC 方式 ”,電子情報通信学会論文誌 B,vol.J85-B,no.10 pp.1728-1737,Oct.2002
![図 6.8 に ∆f T c = 0.1 を与えた場合の引き込み特性を示す.完全に理論値とは一致しな いものの,推定値はいずれも誤差 3% 以内に収まっている.また,周波数オフセットを直 接推定する方式のため, 1 シンボル目から与えられた周波数オフセットの値に近い値を算 出することができる. ��������������������������������������� � ��� ��� ��� ��� ����Eb/N�=��[dB]N=����Estimated �fTc Symbols 図 6.8](https://thumb-ap.123doks.com/thumbv2/123deta/7723914.1711214/33.892.130.761.232.633/引き込み一致し収まっオフセット接推定シンボルオフセット近い値.webp)
