博士学位論文
嚥下機能の医工学的評価に基づく
食物運搬機構を有する人工食道の開発研究
東北大学大学院 医工学研究科 医工学専攻
人工臓器医工学講座
平 恭紀
i
論文要旨
食道疾患患者数は、我が国で増加傾向にあることが知られている。それらの患者は、 生来の食道の持つ食物運搬機能が失われ、重篤な逆流性食道炎または逆流によって胃の 内容物が肺に入り込むことによって引き起こされる肺炎などが課題となっている。中で も食道がん患者は進行の程度によっては、食道の全摘出もしくは亜全摘出を行った後に 再建臓器として胃や小腸を用いる手術を行われる場合がある。これによって経口摂取に よる食事が可能となる一方で、依然として生来の食道の持つ蠕動機能は失われたままと なる。そこで本研究では、そのような患者への新しい治療方法として、能動的な食物運 搬機能を有する埋込可能な人工食道ステントの研究開発を行っている。新しい能動的な 食物運搬機構を構築するために、人間と同程度の体格を有する動物としてヤギの食道を 用いて食道の材料力学的特性試験を行って食道の蠕動運動と食道の材料力学的特性の 分布を医工学観点から人工食道の設計指標を定量化するとともに生体の食道機能医工 学的評価を行うことを目的とした。 第1 章では、食道がんを中心として背景や研究目的についてまとめた。 第2 章では、本研究で行った圧容積試験、食道引張試験、動的粘弾性試験および組織 染色についてまとめた。圧容積試験では、食道内に容積負荷として生理食塩水を注水し その時の内圧との変化からスティフネスパラメータβ を算出した。また食道引張試験は 作製したリング状試料に対して一定の速度で引っ張り、応力ひずみ曲線を得た。その後 非線形性粘弾性モデルを用いて解析を行った。また動的粘弾性試験においては、圧容積 試験と同様に分割を行い、蠕動運動と同程度の周波数の刺激を与えた。それらの結果か ら貯蔵弾性率と損失弾性率を求めた。これらの材料力学的解析の結果から、食道の材料 力学的特性分布を求めた。またElastica-Masson 染色を用いて食道の筋層の厚みを調べ、 材料力学的分布との比較を行い、食道の蠕動運動機構についての考察を行った。 第3 章では、生体の材料力学的試験の結果から、生体食道の蠕動運動の特性に基づく 人工食道ステントのための食物運搬機構を構築した。それらを具現化するためにPTFE シートとNi-Ti 系形状記憶合金線維を用いた構造物を作製した。 第4 章では、本デバイスの駆動制御として、加速度センサおよび 3 次元位置情報セン サを用いて嚥下挙動検知をヒトとヤギを対象として行った。 第5 章では、総合考察を行い、本研究の限界や将来展望などについて述べた。 本研究から食道の蠕動運動を高度に模擬する食物運搬機構を有する埋込可能な人工 食道ステントおよびそれを適切に駆動制御するための嚥下検知システムの開発を行い、ii
iii
目次
第 1 章 緒言
1.1 本研究の背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1 1.2 食道の解剖学的知見・・・・・・・・・・・・・・・・・・・・・・・・・ 3 1.3 食道の食物運搬機能・・・・・・・・・・・・・・・・・・・・・・・・・ 4 1.3.1 嚥下機能・・・・・・・・・・・・・・・・・・・・・・・・・・ 6 1.3.2 蠕動運動・・・・・・・・・・・・・・・・・・・・・・・・・・ 9 1.4 食道癌の治療方法の現状・・・・・・・・・・・・・・・・・・・・・・・ 9 1.4.1 頸部食道癌に対する手術・・・・・・・・・・・・・・・・・・・ 12 1.4.2 胸部食道癌に対する手術・・・・・・・・・・・・・・・・・・・ 12 1.4.3 腹部食道癌に対する手術・・・・・・・・・・・・・・・・・・・ 13 1.4.4 抗がん剤による治療・・・・・・・・・・・・・・・・・・・・・ 13 1.4.5 放射線治療・・・・・・・・・・・・・・・・・・・・・・・・・ 13 1.4.6 対症療法・・・・・・・・・・・・・・・・・・・・・・・・・・ 13 1.5 人工食道の先行研究・・・・・・・・・・・・・・・・・・・・・・・・・ 15 1.6 本研究の目的と医工学的意義・・・・・・・・・・・・・・・・・・・・・ 17 1.7 本論文の構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 17iv
第 2 章 生体を用いた材料試験
2.1 生体の材料試験の目的・・・・・・・・・・・・・・・・・・・・・・・・ 20 2.2 生体試料の試験・・・・・・・・・・・・・・・・・・・・・・・・・・・ 21 2.2.1 圧容積試験・・・・・・・・・・・・・・・・・・・・・・・・・・ 21 2.2.1.1 試験方法・・・・・・・・・・・・・・・・・・・・・・ 21 2.2.1.2 解析方法・・・・・・・・・・・・・・・・・・・・・・ 23 2.2.2 食道引張試験・・・・・・・・・・・・・・・・・・・・・・・・ 24 2.2.2 試験方法・・・・・・・・・・・・・・・・・・・・・・ 24 2.2.3 解析方法・・・・・・・・・・・・・・・・・・・・・・ 26 2.2.3 動的粘弾性試験・・・・・・・・・・・・・・・・・・・・・・・ 29 2.3.2.1 試験試料作製・・・・・・・・・・・・・・・・・・・・ 29 2.3.2.2 解析方法・・・・・・・・・・・・・・・・・・・・・・ 31 2.2.4 組織染色・・・・・・・・・・・・・・・・・・・・・・・・・・ 32 2.2.4.1 実験方法・・・・・・・・・・・・・・・・・・・・・・ 32 2.2.5 線維組織観察・・・・・・・・・・・・・・・・・・・・・・・・ 34 2.2.4.1 試験方法・・・・・・・・・・・・・・・・・・・・・・ 34 2.3 実験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 35 2.2.1 圧容積試験・・・・・・・・・・・・・・・・・・・・・・・・・・ 35v 2.2.2 食道引張試験・・・・・・・・・・・・・・・・・・・・・・・・ 38 2.2.3 動的粘弾性試験・・・・・・・・・・・・・・・・・・・・・・・ 43 2.2.4 組織染色・・・・・・・・・・・・・・・・・・・・・・・・・・ 44 2.2.5 組織線維観察・・・・・・・・・・・・・・・・・・・・・・・・ 47 2.4 生体の材料試験の考察・・・・・・・・・・・・・・・・・・・・・・・・ 49 2.4.1 本研究の妥当性・・・・・・・・・・・・・・・・・・・・・・・ 49 2.4.1.1 生理学的機能・・・・・・・・・・・・・・・・・・・・ 49 2.4.1.2 生理学的構造・・・・・・・・・・・・・・・・・・・・ 49 2.4.2 生体の材料力学学的考察・・・・・・・・・・・・・・・・・・・ 50 2.4.2.1 食道内圧試験・・・・・・・・・・・・・・・・・・・・ 50 2.4.2.2 食道引張試験・・・・・・・・・・・・・・・・・・・・ 51 2.4.2.3 粘弾性試験・・・・・・・・・・・・・・・・・・・・・ 52 2.4.3 組織工学的考察・・・・・・・・・・・・・・・・・・・・・・・ 52 2.5 小括・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 54
第 3 章 設計
3.1 生体食道の蠕動運動機構・・・・・・・・・・・・・・・・・・・・・・・ 55 3.2 部分構造設計・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 57 3.2.1 食物運搬機能の構築・・・・・・・・・・・・・・・・・・・・・ 57vi 3.2.1.1 人工食道のための食物運搬機構・・・・・・・・・・・・ 57 3.2.1.2 食物運搬機構を実現する部分設計・・・・・・・・・・・ 58 3.2.2 Ni-Ti SMA を用いた長軸方向の収縮・・・・・・・・・・・・・ 58 3.2.2.1 Ni-Ti SMA の基本特性・・・・・・・・・・・・・・・・ 58 3.2.2.2 多層シールディング Ni-Ti SMA コーティング・・・・・・ 60 3.2.3 PTFE シートを用いた円周方向収縮部・・・・・・・・・・・・・ 61 3.2.3.1 PTFE シートの基本特性 ・・・・・・・・・・・・・・・ 61 3.2.3.2 ねじれ狭窄構造部・・・・・・・・・・・・・・・・・・ 61 3.2.4 デバイスの全体設計・・・・・・・・・・・・・・・・・・・・・ 64 3.2.5 小括・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 64 3.3 機能評価・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 65 3.3.1 開閉試験・・・・・・・・・・・・・・・・・・・・・・・・・・ 64 3.3.1.1 開閉試験装置・・・・・・・・・・・・・・・・・・・・ 64 3.3.1.2 評価パラメータ・・・・・・・・・・・・・・・・・・・ 65 3.3.2 開閉試験結果・・・・・・・・・・・・・・・・・・・・・・・・ 65 3.3.3 考察・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 67 3.3.4 小括・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 67
vii
第 4 章 嚥下センシング
4.1 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 68 4.2 加速度センサについて・・・・・・・・・・・・・・・・・・・・・・・・ 69 4.2.1 使用機器について・・・・・・・・・・・・・・・・・・・・・・ 69 4.2.2 計測手法・・・・・・・・・・・・・・・・・・・・・・・・・・ 69 4.2.3 加速度センサの計測結果・・・・・・・・・・・・・・・・・・・ 71 4.2.4 考察・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 72 4.3 3 次元位置情報センサ・・・・・・・・・・・・・・・・・・・・・・・・ 72 4.3.1 摂取試料および使用機器について・・・・・・・・・・・・・・・ 72 4.3.2 計測手法・・・・・・・・・・・・・・・・・・・・・・・・・・ 72 4.3.3 嚥下挙動の解析手法・・・・・・・・・・・・・・・・・・・・・ 74 4.3.4 3 次元位置情報センサの計測結果・・・・・・・・・・・・・・・ 76 4.3.4 考察・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 81 4.4 嚥下検知手法の検討・・・・・・・・・・・・・・・・・・・・・・・・・ 82第 5 章 総括
5.1 総括・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 83 5.2 本研究の他分野への応用・・・・・・・・・・・・・・・・・・・・・・・ 84 5.3 本論文の限界・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 85viii 5.4 将来展望・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 86 5.5 まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 87
第 6 章 結語
謝辞
参考文献
研究業績
- 1 -
第 1 章 緒言
1.1 本研究の背景
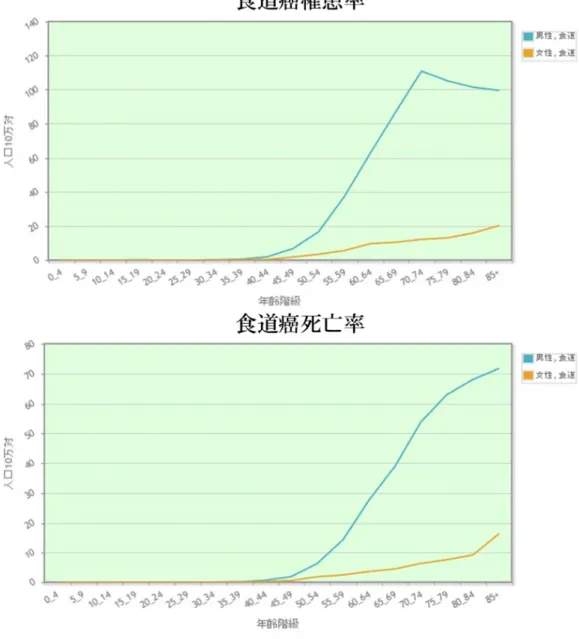
食道癌は、世界中で 8 番目に罹患患者の多い癌であり、2008 年に罹患した患者数が 48 万 2300 人であり、死亡者数が 40 万 6800 人であり[1]、我が国でも例外ではなく、国 立がん研究センターの報告によれば、2010 年のデータに基づいた試算によると、食道 癌の生涯リスクは、男性で2%、女性で 0.4%であると報告されている[2]。 我が国では、少子高齢化がすすんでおり、平成25 年における 65 歳以上の高齢者の人 口は3186 万人で、総人口に占める割合は 25.0%であり、高齢者人口は今後も上昇傾向 を示すと報告されている[3]。食道癌は、40 代から罹患患者数は増大し、罹患患者のほ とんどが高齢者である。食道癌男女別年齢階級別罹患率を見ると、男性の食道癌罹患率 は、2010 年では 65-69 歳でピークを迎えていた。特に男性の罹患率は増加傾向にあり、 食道癌は今後の我が国の課題の一つなっていくと考えられる。 食道癌に限らず、重度の嚥下障害を有する食道疾患の患者は、食塊や水を飲みこむこ とができず、点滴などで栄養素を摂取する必要がある。そのような患者に対して、人工 食道などの嚥下を補助するデバイスがあれば、患者のADL(Activities of daily living) の向上を望めると考えられる。- 2 -
図1.1 食道癌男女別年齢階級別罹患率(上)と食道癌男女別年齢階級別死亡率(下) (国立がん研究センターがん対策情報センターより一部改編)
- 3 -
1.2 食道の解剖学的知見
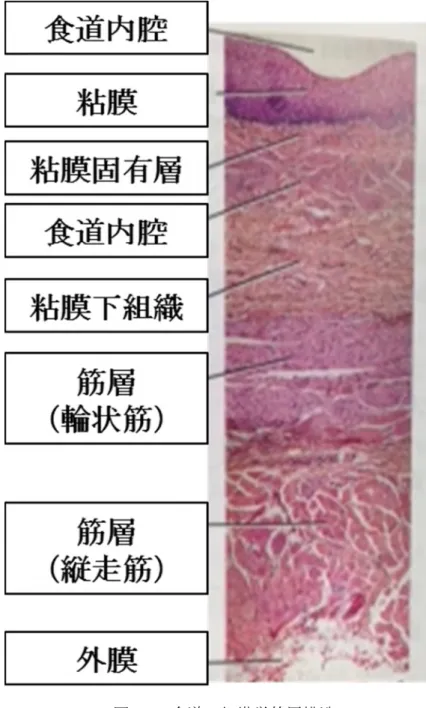
食道は、消化器系に含まれる管腔系臓器の一つである。消化管にはいくつかの機能が あるが(図1.2)、食道は消化酵素の分泌は行わず、吸収機能は存在しない[4]。粘液を 分泌し、経口摂取をした食塊を胃に送る機能がある。 図1.2 消化管の機能のまとめ (トートラ人体の機能と構造 第4 版より一部改編) 食道の長さは約25cm であり、咽頭口頭部で喉頭蓋によって気管と分離させられ、頸 部の内側を通り、横隔膜の食道裂孔を貫通し噴門と繋がっている。解剖学的には気管と 脊柱の間に位置し、胸部から腹部にかけて存在し、直径3 cm 程度のつぶれされた円 形をした筋組織で構成されている。食道の周辺臓器には心臓、肺、肝臓などが存在して いる。 食道の組織学的な層構造を図1.3 で示す。食道の構造は、大別すると内側から粘膜、 粘膜下組織、筋層、外膜の4 層構造から構成されている。 ・粘膜 粘膜とは消化管の最も内側に存在し、内側を覆っている。粘膜はさらに、非角化重層 扁平上皮、粘膜固有層(疎性結合組織層)、粘膜筋板(平滑筋)から構成されている[4]。 粘膜組織は、飲み込んだ異物による損傷から食道を保護している。また、食道の粘膜組 織は5~7 日間ごとに剥離し、新陳代謝されている。 ・粘膜下組織 粘膜下組織とは、粘膜と筋層の間に存在する組織である。食道の粘膜下組織には、疎 性結合組織、血管、粘膜腺が存在しているが、食道は消化活動を行わないためリンパ管 などは存在しない。 ・筋層 食道の筋層は横断面に並行している輪状筋層と、輪状筋層と垂直に走行している縦走- 4 - 筋層が存在する。人間の食道の場合、外側に縦走筋層が走行し、内側に輪状筋層が走行 している。また、一般的に食道上部は横紋筋で構成され、食道中部は横紋筋と平滑筋で 構成され、食道下部は平滑筋のみで構成されている(Fig.2.2)。また、食道の上下の隆 起部にはそれぞれ、上食道括約筋と下食道括約筋が存在している。上食道括約筋は骨格 筋性であり、下食道括約筋は平滑筋性である。 ・外膜 食道は一般的な消化管とは異なり、中皮で覆われた漿膜が存在せず、疎性結合組織か らなる外膜で覆われている。
- 5 -
図1.3 食道の組織学的層構造
- 6 -
1.3 食道の食物運搬機能
食道生理学的な機能は、粘液を分泌することと食物を口から胃まで運搬することであ る。口腔から食道までの食物運搬を嚥下といい、食道の食物運搬時の動きを蠕動運動と いう[4,5]。一般的にヒトをはじめとする雑食性の霊長類では口腔から胃までの流れは一 歩通行であることが知られている。1.3.1 嚥下運動
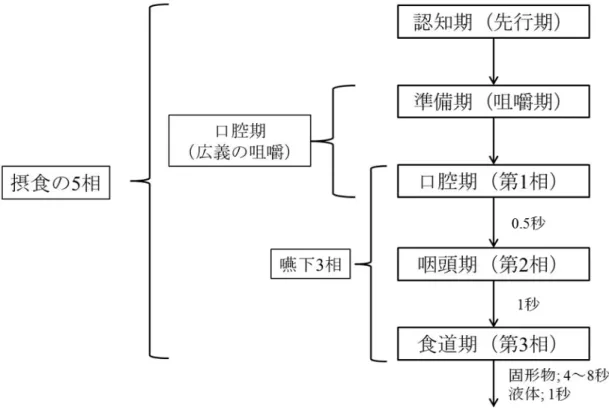
嚥下は口腔と咽頭、食道が関与する食物運送機能であり、唾液と粘液によって促進さ れ、食道の蠕動運動によって今で食物が送られることが知られている[4]。従来では、 嚥下は随意運動である口腔期と不随意運動の咽頭期、食道期で説明されていた。しかし 近年では、食物が口に取り込まれる前の認知がその後の動作に大きく影響することが報 告され、現在では先に述べた3 相に加えて認知期(先行期)、準備期を加えた 5 期で説 明されている[5]。 ・認知期(先行期) 認知期は先行期とも呼ばれ、食物を経口摂取する前の段階を指す。この段階で最も影 響が大きいのは摂食者の過去の経験である。例えば接触者の好物であれば、口腔内に入 れる前の段階で唾液が分泌され、消化の準備が開始される。逆に嫌悪感のある食べ物や、 満腹状態など摂食自体を忌避したい状況下であれば、嘔吐反射が発生し、強制的に口腔 内に入れても口腔諸器官の運動は活発に行われなく、嚥下もスムーズ無には行われない。 また、目の前の食塊の飲み込む量やスピード、準備期での咀嚼の回数を決定する段階で ある。 ・準備期(咀嚼期) 準備期は咀嚼期とも呼ばれ、前述の認知期で食物と判断されたものに対して口腔内に 入れ、食物を粉砕する段階を指す。口腔内に入れられた食物を咀嚼し唾液と混合するこ とで、口腔から食道までを運搬しやすい食塊に加工することでこれより以下の運動をし やすくするために行われる。また後述する口腔期とまとめて口腔期と呼ばれることがあ り、この場合の口腔期は広義の咀嚼と定義される場合がある。- 7 - ・口腔期 口腔期は、食塊を咽頭口部まで運搬する段階である。嚥下において咀嚼期とこの期の みが随意的に行われる段階であり、口腔期は約0.5 秒で口腔内の食塊は咽頭まで運搬さ せられる。 ・咽頭期 咽頭期は、食塊が咽頭部を通過する際に咽頭部の受容体を刺激し、嚥下中枢へ求心性 のインパルスが送られ、軟口蓋と喉頭蓋が移動させられ、咽頭鼻部と気管を封鎖するこ とで食塊の誤入を防ぐ。上部食道括約筋を弛緩させ、食道に食塊を送る。咽頭期は不随 意性の運動であり、職階は約0.7 秒で咽頭部を通過し食道に送られる。 ・食道期 食道期は、食塊が上部食道括約筋を通過すると開始する。食道相では、輪状筋と縦走 筋の収縮と弛緩を繰り返すことで蠕動運動を行い、食塊は胃へ運搬させられる。食道の 通過時間は、食塊の粘度によって異なるが、固形物は約4~8 秒、液体は約 1 秒で通過 する。
- 8 -
- 9 -
1.3.2 蠕動運動
消化管の運動は、主に付随性の運動の蠕動運動と分節運動を行う[4,6]。消化管の食物 運送は、大半を蠕動運動による。分節運動は、消化管の輪状筋を交互に収縮、弛緩させ ることで食塊を前後に動かし機械的消化を行う運動である(図1.5)。 図1.4 消化管の運動(A; 蠕動運動, B; 分節運動) (人体の構造と機能より一部改編)1.4 食道癌治療の現状
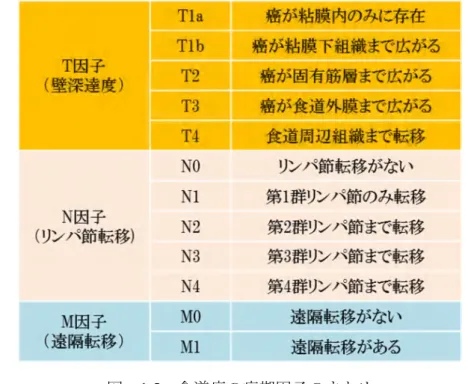
国立がん研究センターによると、食道癌の 5 年相対生存率は男性が 32.3%、女性が 41.3%であり、全がんの平均 5 年相対生存率は、男性で 55.4%、女性で 62.9%であると 報告されており、治療が難しい癌であることが示されている[7]。 食道癌の病期の因子としては癌の浸潤度(T 因子)、リンパ節転移の程度(N 因子) と遠隔転移の有無で表されており、病期によって治療方法が大きく異なる[8]。発見時 の病期によっては侵襲性の高い手術を行わなくとも、根治治療が可能なケースも存在す る。- 10 -
表1.1 全がんと食道癌の 5 年相対生存率[7]
(国立がん研究センターがん対策情報センターより一部改編)
図 1.5 食道癌の病期因子のまとめ
- 11 - 図 1.6 食道癌の病期のまとめ (日本食道学会編「臨床・病理 食道癌取扱い規約(第10 版)」より一部改編) 図 1.7 食道癌の臨床病期と治療手法のまとめ (日本食道学会編「食道癌診断・治療ガイドライン 2007 年 4 月版」より一部改変) 食道癌の5 年相対生存率が全がんの平均と比べて低いのは、診断面と治療面の両面か ら問題があると指摘されている[9]。 診断面の課題としては、食道癌は早期発見が難しいことが挙げられる。食道癌は自覚 症状がない場合が多く、健康診断の際に発見された場合は、無症状であるケースも存在 する。水が飲むことができないなどの自覚症状が顕著に表れてからの場合は、高度に食
- 12 - 道癌が進行してしまっていることがある[10]。 治療面の課題については、臨床病期ごとに用いられる治療手法毎に挙げる。 0 期の食道癌の場合、治療方法として侵襲性の少ない内視鏡による治療が適応できる。 内視鏡的粘膜切除術を行うことで0 期の食道癌の根治治療が可能である。また、0 期以 上の病期の場合でも、特別な事情がある場合には選択される。 臨床病期がⅠ期以上と診断された食道癌の場合、侵襲性の高い治療や対症治療しか選 択せざる負えないケースも存在する[11,12]。Ⅰ~Ⅲ期まで進行した食道癌の治療におい て、患者の健康状態を考慮した上で根治治療として侵襲性の高い外科手術が選択される 場合もあり、必要に応じて化学治療や、放射線治療を術前術後に行われることもある[11]。 外科手術を行う場合は、食道癌の病巣の位置によって3 つの手術方法に大別される。
1.4.1 頸部食道癌に対する手術
[13-16]
頸部食道癌は進行癌である発見されることが多く、リンパ節転移の可能性も高く加え て他の臓器への浸潤が発生しやすいことが知られている。しかし、頸部へのリンパ節転 移が比較的多いため根治手術の適応となる場合が多い。また咽頭部の切除を行うと術後 に発声が困難になるケースがあり、根治治療と術後の生活の質(Quality of life; QOL) への影響の利益と不利益を十分に考慮する必要のある手術である。病態や浸潤の程度な どによって大別して2 種類の手術が行われる。 頸部食道癌は、食道癌全体の約 5%であり、症例数が少ないために治療方法が十分に 検討されていない癌であると言われている。しかし、進行癌で発見される症例が多く、 他臓器への浸潤が容易である癌であり、 再建方法として、遊離空腸を用いた再建が行われている。現在では、根治的化学放射 線治療法の選択されている。1.4.2 胸部食道癌に対する手術
[17-20]
胸部食道癌は最も症例数の多い食道癌である。頸部から腹部まで広範囲にわたりリン パ節転移がみられるため、リンパ節郭清と胸腹部食道、加えて転移頻度の高い胃小彎部 のリンパ節を含めて切除する手術が行われる。 再建方法としては、胃管吻合術を行うことが一般的である。しかし、合併症として胃 がんが認められた場合や、胃の温存を望まれた場合は、回結腸や空腸などを再建臓器と- 13 - して用いる場合がある。また、胃管吻合術を行う場合は、逆流性食道炎が発生する場合 がある。
1.4.3 腹部食道癌に対する手術
[21-24]
腹部食道癌は、腹部食道から噴門に発生する癌であり、下部食道噴門胃側切除または 下部食道胃全摘出が行われ、再建方法として、胸部食道癌と同様に空腸などを用いる場 合と胃管吻合術が行われる。 外科手術の場合、再建臓器として空腸や胃などの他の消化器官を用いる。そのため侵 襲性は高くなり、加えて吻合不良などがあると、体内の清潔領域に体外が触れることに なるために重篤な感染症を引き起こすと考えられるため、いくつかの手法が検討されて いる[23,24]。1.4.4 抗がん剤による治療
[25-27]
抗がん剤治療(化学療法)は主に粘膜に病巣があり、リンパ節転移や遠隔転移が認め られる食道癌に対して行われる治療方法である。放射線治療や外科治療と併用して行わ れる場合も存在する[25-27]。1.4.5 放射線治療
[28, 29]
放射線治療は、体の外から放射線を照射する方法と、食道腔内から照射する方法が存 在する。どちらの場合でも、抗がん剤治療と併用して治療を行う場合が多く、対症治療 だけではなく、根治治療として用いられる場合もある[28, 29]。1.4.6 対症療法
[30, 31]
対症療法は、ステント術や食道バイパス手術などの姑息的治療と前述の抗がん剤治療、 放射線治療が該当する。姑息的治療は切除不能な病巣によって食事の経口摂取ができな い患者に対して行われる治療である。しかし、ステント術では食道内での出血やバイパ ス術では縫合不良が課題となっている[30,31]。- 14 - 表1.2 食道癌の病期別治療方法のまとめ[11-31] 治療方法 適応時期 特徴 内視鏡治療 0 期 癌の病巣が粘膜にとどまっておりかつリンパ節転移が認められていない場 合に根治治療として選択され、低侵襲的治療である。患者の病態によって は0 期以上であっても医師の判断により適応される場合がある。 外科手術 Ⅰ~Ⅲ期 遠隔転移が認められず、病巣が食道内にとどまっている場合に根治治療と して外科手術が選択される。食道摘出後の再建臓器として他の消化器官が 用いられることが多い。病巣の部位によっては術後のQOL や ADL に大き な影響を与える。 抗がん剤治療 (化学治療) Ⅰ~Ⅲ期, Ⅳa 期 (根治治療) 遠隔転移が認められない場合、放射治療と併用し根治治療として選択され る。また、外科手術の前後に行われる場合もある。壁深達度によって用いる 抗がん剤は異なり、粘膜内の癌ではcisplatin が用いられる。 放射治療 Ⅰ~Ⅲ期, Ⅳa 期 (根治治療) 抗がん剤治療とともに、遠隔の転移が認められない場合に抗がん剤治療と 併用して用いられる。体外、もしくは食道腔内から放射線の照射を行う。リン パ節転移が認められている場合でも、医師の判断により、リンパ節転移の予 防のために照射が行われる場合もある。 対症療法 Ⅳb 期 遠隔転移が認められ、患者の病態を考慮し根治治療が不可能と判断され た場合に行われる。食道ステントなどの姑息的治療が行われる場合と抗が ん剤治療、放射線治療を対症的にお行われる場合もある。
- 15 -
1.5 人工食道の先行研究
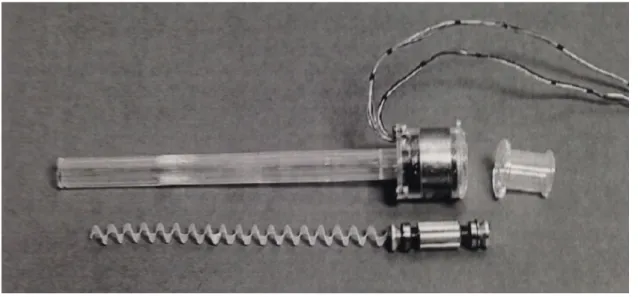
点滴による栄養素補給などの技術の発達のために必ずしも生命の維持に直結しない ことがあり、消化器系の臓器は循環器系の臓器などと比すると研究が十分に行われてい なかった歴史がある[9,10]。しかし、癌の病期と治療の成否によっては社会復帰が困難 となり、社会的な損害は大きくなると予測される。加えて、食道癌の外科的手術は消化 器官の他臓器を用いた再建を行う場合があり、患者の負担は大きい。そこで、患者の負 担の軽減のために他臓器を用いない食道の置換が求められている。他臓器が温存されれ ば、術後のADL は向上し患者の社会復帰へ貢献できると考えられる。そこで、人工食 道の研究が現在までに行われている。 人工食道は、再生医療の手法を用いた再生食道[32-34]と、機械的な人工食道[35,36] の手法から開発が行われていた。また本研究室でも、形状記憶合金線維を用いた人工食 道の開発が行われていた[37]。 ・再生食道[32-34] 再生医療の技術を用いて、食道組織を管腔形状に再生させることで生体の材料力学を 用いた人工食道の研究開発が進められている。スキャホールドとして、無細胞性である ポリエチレンやシリコン、合成材料やコラーゲンなどが用いられている。スキャホール ドから、成熟細胞、胎児細胞や人工多能性幹細胞を培養している。 図1.8 再生食道の作成方法[33]- 16 - ・機械的人工食道[35,36] 食道の機能である、能動的に食塊を送る機能について着目した人工食道である。本研 究室以外の研究機関の人工食道の報告として、螺旋状スクリューを用いた能動的蠕動機 能を有する人工食道の開発がある。胃部付近にモーターなどを設置し、余剰スペースが 少ない胸部へ埋込みも検討されている。また、様々な粘度を有する食塊を想定し、運送 実験の成功も報告されている。 図1.9 螺旋状スクリューを有する機械的人工食道[36] ・形状記憶合金線維を用いた人工食道[37,38]
本研究室では、Ni-Ti 形状記憶合金線維(Ni-Ti SMA)を用いた人工食道の研究開発を 行っている。Ni-Ti SMA を用いることで能動的な食物運搬機能を持たせることと、胸 腔内に埋込可能な省スペース化に成功した。
- 17 -
1.6 本研究の目的と医工学的意義
これまでの食道癌の外科手術後の食道再建や、摘出食道の代替物運用を目指した人工 食道の開発においては、食道の持つ蠕動運動の付加ができない場合が多く逆流性食道炎 や、再建臓器として他の消化管を用いるため消化不良の課題が残るなど術後のADL は 低いと考えられる。 本研究では、成山羊を用いた食道の生体の材料力学評価、および組織学評価を行うこ とで、生体食道の構造を明らかにし、明らかにした構造に基づく生体の蠕動運動の運動 機構の解明を行った。解明した運動機構から、人工食道のための新しい能動的食物運送 機構を構築し、Ni-Ti SMA などを用いて構築した機構を実現させた人工食道の開発を 行うことを目的とした。 本研究の開発デバイスは食道摘出手術適応の食道癌患者に対する新しい生体食道の 代替物としての適用、加えて同様の構造物をステント的に用いることで、現在姑息的治 療などの対症治療適応患者や食道アカラシアなどの他の食道疾患により重篤の嚥下障 害を持つ患者の適応することで、嚥下障害を持つ患者のADL の向上を目的としている。 本研究の持つ社会的意義は、重篤な嚥下障害を持つ患者の治療手法の選択肢として、 実用的な能動的食物運送機能を備えた人工食道を用い、社会復帰までを目指した治療の 選択ができるようになり得ることである。加えて、生体食道の生体の材料力学学的な知 見、および組織学的な知見から食道構造の解明を行う過程で、健常時の生体食道に関す る生体の材料力学、組織学的なデータの網羅的収集を行った。その網羅的なデータを活 用することで現在早期発見が難しいと言われる食道癌の診断技術の向上につながり得 ることも考えられる。1.7 本論文の構成
本論文の構成を図1.11 に示す。第 1 章では食道癌などに代表される食道疾患とその 治療方法の現状、および食道の基礎的な知見についてまとめ、人工食道の現在の動向、 本研究の持つ社会的意義について述べた。 第2章では、本研究で行った圧容積試験、食道引張試験、動的粘弾性試験および組織 染色についてまとめた。圧容積試験では、食道内に容積負荷として生理食塩水を注水し その時の内圧との変化からスティフネスパラメータβを算出した。また食道引張試験は 作製したリング状試料に対して一定の速度で引っ張り、応力ひずみ曲線を得た。その後- 18 - 非線形性粘弾性モデルを用いて解析を行った。また動的粘弾性試験においては、圧容積 試験と同様に分割を行い、蠕動運動と同程度の周波数の刺激を与えた。それらの結果か ら貯蔵弾性率と損失弾性率を求めた。これらの材料力学的解析の結果から、食道の材料 力学的特性分布を求めた。またElastica-Masson 染色を用いて食道の筋層の厚みを調べ、 材料力学的分布との比較を行い、食道の蠕動運動機構についての考察を行った。 第3 章では、生体の材料力学的試験の結果から、生体食道の蠕動運動の特性に基づく人 工食道ステントのための食物運搬機構を構築した。それらを具現化するためにPTFE シ ートとNi-Ti 系形状記憶合金線維を用いた構造物を作製した。 第4 章では、本デバイスの駆動制御として、加速度センサおよび 3 次元位置情報センサ を用いて嚥下挙動検知をヒトとヤギを対象として行った。 第5 章では、総合考察を行い、本研究の限界や将来展望などについて述べた。
- 19 -
- 20 -
第 2 章 生体を用いた材料試験
2.1 生体の材料力学試験の目的
本章では、新鮮摘出食道の生体物性の計測について記述する。食道の最も重要な機能 として、口から摂取した飲食物を胃へ送り込む蠕動機能が挙げられる。本研究デバイス である能動的人工食道ステントは、この機能を人工物で代替する機構を有することを目 的としている。 食道が有する食物運搬機能を高度に模倣する食物運搬機構を構築するために、本研究 では食道の生体力学的特性について詳細な解析を行い、部位と生体の材料力学的変化に ついて計測を行った。また食道の生体力学的特性を明らかにすることは、本研究デバイ スの開発のみならず、健常な食道壁の特性を明らかにすることで、現在早期発見が難し いといわれている食道癌に対する新しい検査方法のための基礎的なデータになり得る と考えられる。 他の研究機関による食道の生体の材料力学的特性解析に関する報告では、小腸なども 含めた消化器官の蠕動運動の周波数解析や一部分を対象として、詳細な検討をされてい る報告がある。 しかしながら食道は、第1 章で述べたように、頸部から腹部にまたがる巨大臓器であ るために解剖学的な位置によって食道壁の特性は異なると考えられ、本研究ではそれに 着目し計測を行った。また本研究の計測は一部の計測を除き、安楽死直後の成ヤギから 1 時間以内に食道の摘出を行い、12 時間以内にすべての計測を終了しているため、生 体中の食道壁に近い条件で計測を行った。 本計測では、圧容積試験、食道引張試験および動的粘弾性試験を行い、それぞれについ て得られ生体の材料力学的パラメータと試料摘出位置の比較検討を行った。- 21 -
2.2 生体試料の試験
2.2.1 圧容積試験
2.2.1.1 実験方法
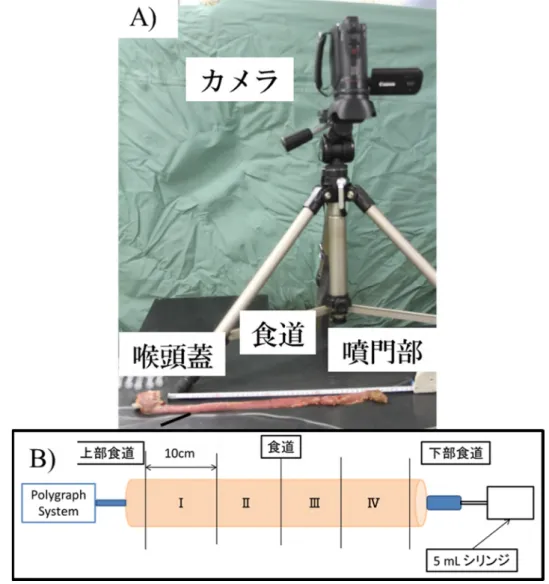
本実験は、摘出食道に生理食塩水を定量ずつ注水することで、食道内圧の変化と容積 の変化の関係を明らかにし、動脈硬化の指標として用いられるStiffness parameter ß を適 応して、生体食道の管腔形状での特性を調べた。 本研究では、他の動物実験後の健常成山羊の食道を摘出して行った。安楽死後、胃の 内容物を逆流させないために、胃の上部の結紮を行った。頸部の切開を行い、咽頭口部 と喉頭蓋の間を剪刀で切断した。食道外膜の剥離を行い、気管の切除を行った。剥離後、 噴門部を切除し、図3.1 に示すような食道の摘出を行った。健常成山羊の平均体重は 46.5 ± 12.7 kg であり、平均食道長は 45.1 ± 2.02 cm であった。摘出は安楽死後 1 時間以内に 行い、摘出食道を用いた生体の材料力学評価実験において、特筆しない限りすべての手 順を摘出後3 時間以内に計測を行った。 また本実験の全ての手順は、東北大学動物実験倫理委員会の承認に基づき行われた。 図2.1 摘出された成山羊食道(喉頭蓋から噴門部摘出) 摘出食道を、10 cm 毎の Segment に分けた。両端からカテーテルを挿入し、一端を 5 mL シリンジに連結し、もう一端を圧力トランスデューサと連結させた。その後 Segment の両端を糸で結紮した。1 秒以内に 5 mL の生理食塩水を食道内に注水し、15 秒間の静 置後、同様の手順を食道内圧が200 mmHg を超えるまで行い、その時の食道内圧の変化 を、レコーダー(TEAC 社;LX110)を用いて 1 kHz サンプリングで記録した。- 22 -
- 23 -
2.2.1.3 解析方法
得られた圧力の時間変化において、圧力変化のピークを生理食塩水注水時の食道内圧 として、食道内圧と食道容積の関係のプロットを行った。加えて、食道は管腔系臓器で あり、動脈硬化の指標として用いられているStiffness parameter ß [39]を用いて、食道の 円周方向のStiffness の定量評価を行った。 ・Stiffness parameter ß 血管におけるStiffness parameter ß は以下の式(式(2.1))で表される。𝐒𝐒𝐒𝐒𝐒𝐒𝐒𝐒𝐒 𝐩𝐩𝐩𝐩𝐩 𝐩𝐩𝐩𝐩 𝛃 =
𝐥𝐧(𝑷𝒔𝒚𝒔𝟓𝑷𝒅𝒊𝒂) (𝑫𝒔𝒚𝒔𝟓 𝑫𝒅𝒊𝒂) 𝑫𝒅𝒊𝒂 𝟓⋯ (2.1)
𝑷𝒔𝒚𝒔; 収縮期動脈圧, 𝑷𝒅𝒊𝒂; 拡張期動脈圧, 𝑫𝒔𝒚𝒔; 収縮期動脈径, 𝑫𝒅𝒊𝒂; 拡張期動脈圧 Stiffness parameter ß は収縮期血圧と拡張期血圧の比と、拡張時の血管径で規格化 した血管の収縮拡張時の血管径の変位の関係を表している[40]。この値が高値を示すほ ど、血管の円周方向の拘束力は強くなると考えられる(図2.2)。 本研究では食道Segment は円柱形であることと、10 cm で結紮しているため高さは 10 cm でほぼ一定であることを仮定すると、食道の容積変化は管腔断面積の変化のみで起 こり、容積変化は径変化とみなすことができる。加えて、結紮地点からの漏れは存在し ないすると食道の容積変化は注水生理食塩水の総量と同値である。 したがって、本研究ではStiffness parameter ß を生理食塩水注水時の食道内圧と食道 の容積変化から算出した。今後は特に断りがない限りStiffness parameter ß は以下の 式(式(2.2))で定義される値として用いる。𝐒𝐒𝐒𝐒𝐒𝐒𝐒𝐒𝐒 𝐩𝐩𝐩𝐩𝐩 𝐩𝐩𝐩𝐩 𝛃 =
𝐥𝐧(𝑷𝒊𝒏 𝒑𝒓𝒆𝟓 )𝑷𝟎 (𝑽𝒊𝒏 𝒗𝒐𝒍 𝟓 𝑽𝟎) 𝑽𝟎 𝟓⋯ (2.2)
𝑷
𝒊𝒏 𝒑𝒓𝒆; 生理食塩水注水時食道内圧, 𝑷𝟎; 生理食塩水𝟓 𝐦 𝐋注水時食道内圧- 24 -
𝑽
𝒊𝒏 𝒗𝒐𝒍; 生理食塩水注水総量, 𝑽𝟎; 𝟓𝐦 𝐋2.2.2 食道引張試験
2.2.2.1 実験方法
本実験では、前章で生体食道の管腔系臓器としての特性を計測したのに対し、食道壁 自体の生体の材料力学評価を行った。また、食道の部位分けを細分化することにより前 章で結果から得られた、生体食道では上部食道と下部食道では輪状筋層と縦走筋層の比 率に差異が存在するという知見のより詳細な検討を目的とした。 食道引張試験は、摘出食道を各Segment にリング状試料に切り出し、引張試験機を用 いて等速引張を行い、Stress-Strain 曲線、および引張終了後の応力緩和曲線を測定し、 食道壁の筋層の特性を調べた。 摘出食道を、図2.6 に示すように、5 cm 毎に切断し 8 つの Segment に分け、それぞ れできた7 つの切断面を試料採取位置とした。切断した各 Segment の上下端 1 cm を 切り取り、粘膜層および粘膜下組織を除去し、リング状試料の作成を行った。その後精 密電子天秤(Mettler Toledo 社 AB204-S)を用いて各リング状サンプルの重量を測定 した。リング状試料は、図2.4 に示す試験装置を用いて計測を行った。リング状試料はたわまない程度に引っ張った状態を初期状態とし、その時の食道試料 の長さを初期長さ、その時の応力を0 Pa として計測を行った。
引張試験機(Oriental motor 社 PWA-100)を用いて、試料の初期長さに対して の1%のひずみを毎秒与え 100 秒間の引張を行い、引張後 300 秒間静置し応力緩和をさ せた。ロードセル(Kyowa 社 LTS-2KA)、およびひずみゲージ増幅器(Kyowa 社 DPM-712B)を用いて、応力を計測し、レコーダー(Teac 社 Es8)を用いて、1 kHz サンプリングで記録した。
- 25 -
図2.6 リング状試料の採取位置
- 26 -
2.2.2.2 解析方法
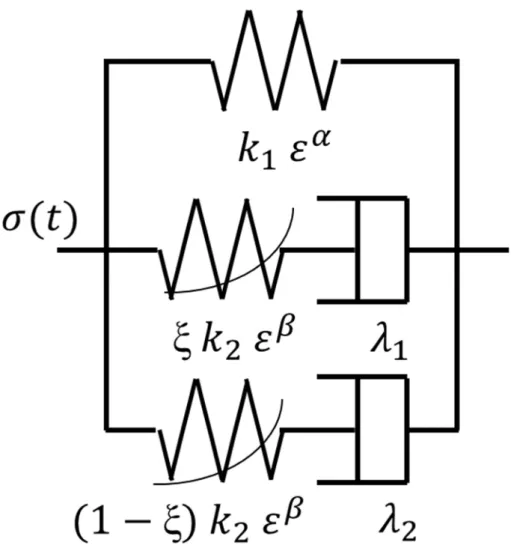
引張試験は引張終了時の最大応力と位置のプロットを行った。応力緩和の解析方法と して、非線形粘弾性モデルを採用した。図2.8 に示すように、非線形粘弾性モデルは、 直列に接続されたバネとダッシュポッドと、それと並列に接続されたバネから構成され ている[42]。 非線形粘弾性モデルは、以下の式(式(2.2.1))で表される。 𝛔(𝒕)= 𝒌𝟏 𝜺𝜶(𝒕) + 𝒌𝟐 𝟓 𝟓𝝃 𝒆𝒙𝒑𝟓−𝟓𝒕 ′− 𝒕𝟓 𝝀𝟏 𝟓 𝒕 𝟎 + (𝟏 − 𝝃)𝒆𝒙𝒑𝟓−𝟓𝒕′𝝀− 𝒕𝟓 𝟐 𝟓𝟓𝒅𝟓𝜺 𝜷(𝒕′)𝟓⋯ (𝟐. 𝟐. 𝟏) 𝝈(𝒕); 応力, 𝒌𝟏, 𝒌𝟐; 非線形弾性係数, 𝝀𝟏, 𝝀𝟐; 時定数 引張開始から引張終了(ts)までは一定のひずみ速 u で引張を行い、その後 t 秒間静置を 行うとすると、ひずみの時間微分は 𝜺̇(𝒕𝟓) = 𝒅𝜺 𝒅𝒙 = 𝐮 (𝟎 ≤ 𝐭≤ 𝐭𝐬) ⋯ (𝟐. 𝟐. 𝟐) 𝜺̇(𝒕𝟓) = 𝒅𝜺 𝒅𝒙 = 𝟎 (𝐭𝐬≤ 𝐭≤ 𝐭) ⋯ (𝟐. 𝟐. 𝟑) とそれぞれあらわすことができる。よって、積分区間を分けることで式(3.1)は下記の ように式変形される 𝛔(𝒕)= 𝒌𝟏 𝜺𝜶(𝒕) + 𝒌𝟐 𝟓 𝟓𝝃 𝒆𝒙𝒑𝟓−𝟓𝒕 ′− 𝒕𝟓 𝝀𝟏 𝟓+ (𝟏 − 𝝃)𝒆𝒙𝒑𝟓− 𝟓𝒕′− 𝒕𝟓 𝝀𝟐 𝟓𝟓𝒅𝟓𝜺 𝜷(𝒕′)𝟓 𝒕𝒔 𝟎 + 𝒌𝟐 𝟓 𝟓𝝃 𝒆𝒙𝒑𝟓−𝟓𝒕 ′− 𝒕𝟓 𝝀𝟏 𝟓+ (𝟏 − 𝝃)𝒆𝒙𝒑𝟓− 𝟓𝒕′− 𝒕𝟓 𝝀𝟐 𝟓𝟓𝒅𝟓𝜺 𝜷(𝒕′)𝟓 𝒕 𝒕𝒔 また、生体の材料力学については羊の羊膜試験の結果からξ=0.5、β=0.3 であると報告さ れており、上記の式は- 27 - 𝛔(𝒕) = 𝒌𝟏 𝜺𝜶(𝒕) + 𝒌𝟐 𝟓 𝟓𝒆𝒙𝒑𝟓−𝟐 (𝒕 𝟓− 𝒕) 𝝀𝟏 𝟓 + 𝒆𝒙𝒑𝟓− (𝒕𝟓− 𝒕) 𝝀𝟐 𝟓𝟓𝜺 𝟑(𝒕𝟓)𝜺̇(𝒕𝟓)𝒅𝒕′ 𝒕𝒔 𝟎 + 𝒌𝟐 𝟓 𝟓𝒆𝒙𝒑𝟓−𝟐 (𝒕𝟓𝝀− 𝒕) 𝟏 𝟓 + 𝒆𝒙𝒑𝟓− (𝒕𝟓− 𝒕) 𝝀𝟐 𝟓𝟓𝜺 𝟑(𝒕𝟓)𝜺̇(𝒕𝟓)𝒅𝒕′ 𝒕 𝒕𝒔 と示され、積分区間によるひずみの時間微分を考慮すると 𝛔(𝒕) = 𝒌𝟏 𝜺𝜶(𝒕) + 𝒖 𝒌𝟐 𝟓 𝟓𝒆𝒙𝒑𝟓−𝟐 (𝒕 𝟓− 𝒕) 𝝀𝟏 𝟓 + 𝒆𝒙𝒑𝟓− (𝒕𝟓− 𝒕) 𝝀𝟐 𝟓𝟓𝜺 𝟑(𝒕𝟓)𝒅𝒕′ 𝒕𝒔 𝟎 したがって、𝜀(𝑡𝟓) = 𝑢𝑡′ でありかつ静置時間区間(ts ≤ t ≤ t)において、ひずみは Constance (ε)であるため、最終的に式(2.2.1)は下記のように示される。 ・時間区間 0 ≤ t ≤ tsで積分 𝛔(𝒕) = 𝒌𝟏 𝜺𝜶(𝒕) + 𝒖 𝟒𝒌𝟐 𝟓 𝟓𝒆𝒙𝒑𝟓−𝟐 (𝒕 𝟓− 𝒕) 𝝀𝟏 𝟓 + 𝒆𝒙𝒑𝟓− (𝒕𝟓− 𝒕) 𝝀𝟐 𝟓𝟓(𝒕 𝟓)𝟑𝒅𝒕′ 𝒕𝒔 𝟎 ⋯ (𝟑. 𝟒) ・時間区間 ts ≤ t ≤ tで積分 𝛔(𝒕) = 𝒌𝟏 𝜺𝜶 ⋯ (𝟐. 𝟐. 𝟓) よってこの非線形粘弾性モデルでは、引張試験中のヒステリシス項を積分部分で示し ている。本研究では、静置後の応力緩和曲線に対して式(2.2.4)を用いて数値パラメータ 解析を行った。
- 28 -
- 29 -
2.2.3 動的粘弾性解析
2.3.2.1 試験試料作成
レオメーターを用いて粘弾性計測を行った。摘出食道をSegment に切取り、その後各 Segment の中央から円状試料を作成した。蠕動運動の振動周期に近い振動周期を与えた 時の粘弾性の計測を行った。また本計測は、早稲田大学Twins 藤江研究室 築根真理 子氏と共に行った。 摘出食道を、図2.13 に示すように 4 つの Segment に切取り、各 Segment の中央部か ら直径8 mm の円形状に食道壁を切り取り、粘膜層を除去して円状試料を作成した。 図2.14 に示す実験装置を用いて、計測試料のレオメーター(TA Instruments, RA Rheometer ARes-G2)による角周波数ごとの粘弾性計測を行った[1]。この計測は、食 道摘出後1 日以内に行われた。- 30 -
図2.13 円状試料の採取位置、および採取組織の模式図
- 31 -
2.3.2.2 解析方法
レオメーターを用いて、粘弾性の計測を行った。計測されたデータから、食道壁の各 部位の動的な粘弾性を貯蔵弾性率と損失弾性率を用いて表した。貯蔵弾性率と損失弾性 率は、計測試料に対して正弦波ひずみ(式(2.3.5))を与えた時に、𝜸(𝒕)
=
𝜸
𝟎𝐬𝐬𝐬𝝎 𝒕 … (2.3.5)
𝛄; 正弦波歪み, 𝜸𝟎; 初期歪み 以下の式(式(2.6))で示される応力応答をする。𝝈(𝒕)
=
𝝈
𝟎𝐬𝐬𝐬(𝝎 𝒕+ 𝜹) … (2.3.6)
𝛄; 応答応力, 𝜸𝟎; 初期応力, 𝛅; 位相遅れ 式(2.6)は次のように表すことができる。𝝈 = 𝟓
𝝈
𝜸
𝟎 𝟎𝐜𝐜𝐜𝜹𝟓 𝜸
𝟎𝐬𝐬𝐬𝝎 𝒕+ 𝟓
𝝈
𝟎𝜸
𝟎𝐬𝐬𝐬𝜹𝟓 𝜸
𝟎𝐜𝐜𝐜𝝎
𝒕
𝝈 = 𝟓
𝝈𝟎 𝜸𝟎𝐜𝐜𝐜𝜹𝟓 𝜸
𝟎𝐬𝐬𝐬𝝎 𝒕+ 𝟓
𝝈𝟎 𝜸𝟎𝐬𝐬𝐬𝜹𝟓 𝜸
𝟎𝐬𝐬𝐬(𝝎 𝒕+
𝝅 𝟐)… (2.3.7)
計測試料が、理想的な弾性体であった場合は正弦波ひずみに対して同位相で応力応答 をする。すなわち、位相遅れδ は 0 となる。逆に計測試料が理想的な粘性体であった場 合、正弦波ひずみに対して逆位相で応力応答をする。すなわち、位相遅れδ は𝟓 𝟓となる。 計測試料が粘弾性体である場合、位相遅れδ は中間値(0 < δ <𝟓 𝟓)を取り、ゼロに近い か𝟓 𝟓に近いかで、計測試料が弾性的か粘性的かを判断できる。 式(2.7)の右辺と、理想的な弾性体、および粘性体の正弦波ひずみに対する応答を比す ると、式(2.7)の第 1 項は弾性項、第 2 項は粘性項に対応していると考えられ、それぞれ の係数を𝐺𝟓, 𝐺𝟓𝟓とすると、𝑮
𝟓=
𝝈𝟎 𝜸𝟎𝐜𝐜𝐜𝜹 … (2.3.8)
𝑮
𝟓𝟓=
𝝈𝟎 𝜸𝟎𝐬𝐬𝐬𝜹 … (2.3.9)
と定義できる。𝐺𝟓を貯蔵弾性率、𝐺𝟓𝟓を損失弾性率であり、計測試料の動的弾性率は貯 蔵弾性率、動的粘性率は損失弾性率で表されている。- 32 -
2.2.4 組織染色
2.2.4.1 試験方法
本実験では摘出食道の病理標本を作製し、組織学的な構造を調べることを目標とした。 本実験では、生体食道の組織構造の中でも輪状筋層と縦走筋層が蠕動運動に大きく寄与 していると仮定し、各筋層の走行の仕方、および厚さを上部食道と下部食道で比較検討 を行うことを目的とした。特に輪状筋層と縦走筋層に着目し、上部食道と下部食道では それぞれの筋層の走行の仕方、及び厚さの比の差異の比較検討を行った。また、筋層線 維の走行の仕方について、酢酸を用いて筋層を剥離することで観察を行った。 また本実験は、病理標本の作製を共同研究者の東北大学 大学院 医学系研究科の神 谷蔵人氏および日本病理研究所と共に行った。 図2.16 に示すように、摘出食道を 10 cm 毎の Segment に切り分け、各 Segment の中 央から水平面と平行に食道組織を切断し、摘出食道1 つにつき 4 つの試料を得た。得ら れた試料に対して Elastica-Masson 染色法を用いて染色を行い[43]、結合組織、筋組織、 核の染色を行った。 染色試料の観察は、光学顕微鏡(DM 5000 B, Leica)により染色された組織切片につい て行った。さらに、光学顕微鏡に接続したデジタルカメラで画像デジタルデータを取得し、 データの定量解析用データを記録した。組織染色のための試料は、食道に対して短軸像で の包埋組織切片であり、縦走筋層は切片表面に対して垂直方向の走行となり、一方、輪状 筋層の走行は同表面に対して平行な方向をもつ。したがって、組織切片画像においては、 切片表面に垂直な方向をもつ線維組織はその組織の短軸径を小領域にもつ組織層構造を示 し、また切片表面に平行な方向をもつ線維組織は、その組織の長軸領域を断面組織として 示すため平行な組織の画像成分は、短軸像にくらべて大領域の画像を構成する。 本試験においては、食道筋層を解剖学的に構成する層構造の厚さを食道上部下部で比較 するため、包埋切片画像の染色筋組織について、食道短軸に対して平行な筋組織層を輪状 筋層、また、食道短軸に対して垂直な筋組織線維方向をもつ筋層を縦走筋層と定義し、画 像データから領域のクラスタリング処理を行い両筋層の比率を比較した。 画像クラスタリングにおいては、以下の評価項目を用いて画像解析を行った(Mathematica, Wolfram)。 i) 連続性がある領域を一様な筋組織構造として抽出すること ii) 隣り合う別境界とは Elastica-Masson 染色の線維組織染色によって区別されること- 33 - iii) 輪状筋層および縦走筋層の関心領域について境界をセグメントとして画像より領域 クラスタリングを行うこと この領域による筋層幅の比較については、以下の手順により解析を進めた。 a) 画像のクラスタリング b) 微小領域の削除 c) 領域のカラーリング(隣り合う領域区分を抽出用に色分けして弁別) d) 関心領域の選択 e) 関心領域の境界再抽出(skeleton transform による) さらに、輪状筋組織では短軸像において動径短縮方向の収縮方向ベクトルを求めることを 目的として、以下の方法により機能的収縮方向の係数比を算出した。 f) 原画像による包埋切片組織の平行線維方向の抽出(輪状筋層の線維方向成分 r について -π/2 < r < π/2 として成分を定義) 以上の方法による包埋組織の画像データ解析により、次の区別および領域抽出と短軸像に おける筋層厚さを定量評価する。 a) Elastica-Masson 染色による食道短軸像の筋層(輪状筋・縦走筋層)の抽出 b) 食道筋層(輪状筋・縦走筋層)全層厚さ La c) 摘出山羊食道の短軸像において再外側に構成される筋層の抽出(輪状筋層; 包埋切片 組織に対して平行な領域) d) 抽出領域の厚さ計測(輪状筋層)Lr これらの画像解析データより、輪状筋比率Rm=Lr/La を求め、食道部位に関してこれらの 比率を比較し、解剖学的な筋走行の比率差違を検討し、さらに短軸像での動径収縮方向の ベクトル平均から輪状筋収縮に関する短軸径収縮比rを求め、収縮ベクトル成分について も比較を行った。 図2.16 摘出食道と病理標本採取位置
- 34 -
2.2.5.1 試験方法
本研究では図2.20 に示すように、摘出食道を 2.2 節のリング状食道試料の採取位置と 同等の位置を含む7 つの segment を切り出し、7 つの筋線維観察試料を得た。得られた 試料を、沸騰した1 wt%の Acetic acid に 10 分間つけ、結合組織を溶かした。画像から 輪状筋層の線維方向の推定を行い、筋層の剥離を行った。 得られた筋層剥離試料の表面の円周方向の筋層の線維方向と、水平面方向のなす角を 画像解析から求めた。 図2.20 結合組織融解後の摘出食道- 35 -
2.3 実験結果
2.3.1 圧容積試験
図2.3 に、喉頭蓋直下の上部食道と噴門部直上の食道内圧と経過時間のグラフを示す。 15 秒ごとに生理食塩水を注水しているため、15 秒ごとに食道内圧のピークが存在する。 食道内圧のピークと、生理食塩水注水量のプロットを行うことで、図 2.4 に示す食道 内圧と容積の曲線を得た。加えて、式(2.2)を用いることで図 2.5 のような食道の各部位 毎の直線を得た。 図2.3 において、上部食道の食道内圧の上昇の開始は下部食道より遅れており、その 傾向は図2.4 でも同様に認められる。しかし、200mmHg まで到達するのは両者ともに 大差は認められなかった。 図2.4 で示されている食道内圧の範囲は健常成人の平均食道内圧(8~29 ± 5 mmHg)であり[41]、その範囲において食道内圧容積曲線には各部位ごとに差異が確認 された。また、食道内圧の上昇は体積増加に対して非線形な増加をしていた。食道容積 が20-40mL の間では、上部食道は下部食道と比して食道内圧が低値を示している。 図2.5 の直線の傾きがそれぞれの部位の Stiffness parameterß を示しており、上部食 道では下部食道に比して高値を示した。本実験の結果から、上部食道と下部食道は管腔 系臓器としての生体の材料力学的性質に差異があることが示唆された。- 36 -
- 37 -
図2.4 食道内圧と容積の関係
- 38 -
2.3.2 引張試験
図2.9 に本計測で得られた上部食道、中部食道および下部食道のそれぞれの代表値 のリング状食道試料の応力の時系列変化を示す。また図2.10-2.12 は引張終了時刻(100 秒)から300 秒間静置した時の応力緩和曲線に式(2.2.7)を用いて、非線形粘弾性モデル による数値パラメータ解析を行った結果である。 図2.9 に示すように、上部食道と下部食道はともに、引張時の応力と経時時間変化に 対してS 字カーブ状の曲線であることが認められた。引張終了時の静置においては、と もに応力緩和現象が認められた。また引張時の最大応力は、上部食道で3.19 MPa、中部 食道で1.17 MPa、下部食道で 0.680 MPa を示した。 図2.10 では k1の値と解剖学的位置の関係を示す。上部食道から下部食道に至るまで に減少傾向があり、またそれぞれのsegment 内でも局所的に上部から下部にかけて減少 傾向が見られた。 図2.11 では k2の値と解剖学的位置の関係を示す。k1と比して値は小さく、また解剖 学的位置との関係性は見られなかった。 また本研究で用いた解析モデル(式(2.2.5))では、ξ=0.5 であるため、図 2.8 の非線形ば ねおよび非線形ダッシュポッドを直列でつないでいる2 種の部分は時定数 λ1およびλ2 の数値の違いを除いて等しいため、本研究ではλ1 > λ2とした。 したがって図2.12 では青点が λ1を示し、赤点がλ2を示し、それぞれの値と解剖学的 位置を示した。k1と同様に上部食道から下部食道に至るまでに減少傾向があり、またそ れぞれのsegment 内でも局所的に上部から下部にかけて減少傾向が見られた。- 39 -
- 40 - 図2.10 非線形粘弾性モデルの k1とリング状試料の採取位置の関係
0
5
10
15
20
25
30
35
0.0
0.5
1.0
1.5
2.0
Portion Proximal Distal cm
k1
M
P
- 41 - 図2.11 非線形粘弾性モデルの k2とリング状試料の採取位置の関係
0
5
10
15
20
25
30
35
0.00
0.02
0.04
0.06
0.08
0.10
Portion Proximal Distal cm
k2
kP
- 42 - 図2.12 非線形粘弾性モデルのλ1およびλ2とリング状試料の採取位置の関係
0
5
10
15
20
25
30
35
0
10
20
30
40
50
Portion Proximal Distal cm
1
an
d
2
se
c
- 43 -
2.3.3 粘弾性試験
図2.15 はレオメーターを用いた𝐺𝟓、および𝐺𝟓𝟓と正弦ひずみの周波数の関係である。 実線部は貯蔵弾性率、破線部は損失弾性率を示している。 損失弾性率は正弦波ひずみの変化に対して上部食道および下部食道ともにはほとん ど変化を認められなかった。しかし、貯蔵弾性率は上部食道下部食道ともに増加傾向が あることが認められた。貯蔵弾性率の増大は、計測試料が条件変化によって弾性的性質 が優位になったことを示している。 図2.15 レオメーターを用いた𝐺𝟓、および𝐺𝟓𝟓と正弦波ひずみの周波数の関係- 44 -
2.3.4 組織染色
図 2.17 では、本実験を行う前に先行的に行った食道壁の一部を水平面に並行に切断 し、切り開き、加えて粘膜層の除去を行い、シート状に加工した食道試料である。図 2.18 は局所的病理標本の上部食道と下部食道のである。図 2.19 で示されているのは筋 層抽出を行ったデジタルデータについて、筋層の線維方向の分布を調べたものである。 線維方向の分布から得られた輪状方向の筋層の幅を表2.4.1 にまとめた。 図 2.17 で示された食道壁の筋層内に、白色の線維状の組織が認められた。これは 筋層間結合組織であると考えられ、筋層の層構造の存在が肉眼によっても確認できた。 注視を行うと、肉眼で筋層の線維方向が確認できた。 図 2.18 では組織標本のクラスタリングによる画像処理を行い、食道の輪状筋層の抽 出を行った。図2.19 は抽出した輪状筋層の線維方向の解析を行った結果である。横軸 は線維方向の傾きを示しており、縦軸はその線維方向の傾きを持った線維の量を示して おり、横軸ゼロ値は各抽出された輪状筋層と平行に走行する線維方向である。表 2.4.1 は図 2.19 を積分することで、各輪状筋層の厚さを計算した。上部食道では、下部食道 と比して輪状筋層の厚さが2.18 倍であった。 図2.17 シート状の食道壁の水平面断面- 45 -
- 46 -
図2.19 輪状筋層の線維方向の分布
- 47 -
2.3.5 組織線維観察
図2.21 では沸騰した 1 wt%の Acetic acid に 10 分間浸し、外側の筋層(輪状筋層)を 剥離した図を示す。図 A)中の点線が水平面方向を示し、実線が得られた試料の輪状筋 層の線維方向を示し、図中の θ はなす角を示している。図 B)では輪状筋層を剥離し、 縦走筋層と輪状筋層の走行を観察した。輪状筋層と縦走筋層の境目では、互いの層が入 り組んだ構造をしていることが示唆された。 図 2.22 では図 2.21A)のようにして得られた水平面方向と輪状筋層のなす角を解剖学 的位置との関係をまとめた。上部食道に比して下部食道では高値を示す傾向があった。 図2.21 A)得られた沸騰試料および水平面と輪状筋層のなす角,B)輪状筋層剥離- 48 - 図2.22 得られた水平方向と輪状筋層のなす角と解剖学的位置
0
5
10 15 20 25 30 35
0
5
10
15
20
Distance from epiglottis to stomach cm
O
ut
er
m
us
cl
e
la
ye
r
de
cl
in
at
io
n
an
gl
e
de
gr
ee
- 49 -
2.4 生体を用いた材料試験の考察
2.4.1 本研究の妥当性
本研究では能動型人工食道開発のために、ヤギの生体食道を用いて食道の生体の材料 力学的特性および組織工学的特性を明らかにした。しかし、ヤギと人間は動物種が異な るため、消化器官の組織工学的構造および機能においていくつか異なる点が存在する。 本節ではヤギと人間の食道の相違点をまとめ、ヤギの食道のバイオメカニクス的特性に 基づき人工食道の設計を行うことの妥当性について述べる。2.4.1.1 生理学的機能
本研究で採用している動物は、草食動物であるヤギである。したがって人間の食道と はいくつか異なる生理学的機能を有していることが知られている。その一つが反芻機能 である。ヤギやウシをはじめとするほとんどの草食動物は、反芻動物である[45]。一般 的に反芻動物は第四の胃まであることが知られている。反芻運動とは、食物を消化する 際にそれぞれの胃の中の内容物を口腔へ運搬し、別の胃へその内容物を送り込む消化器 官の一連の運動である。反芻運動を繰り返すことで、草食動物は経口摂取した食物から 消化を行い、たんぱく質などの栄養素を摂取することができる。ごく一部の例外を除き、 ヒトなどをはじめとする雑食性の霊長類は一般的に食物の消化および栄養を目的とし た反芻運動を行うことは報告されていない。2.4.1.2 生理学的構造
人間の食道筋層の構成は、食道を長軸方向に三等分した時の上部側は横紋筋のみで構 成されており、中部は横紋筋と平滑筋が半々で構成され、下部では平滑筋のみで構成さ れている[46]。しかし、ウシなどの草食動物の食道筋層はすべて平滑筋で構成されてい る[47]。人間の食道筋層は外側の縦走筋層が存在し内側に輪状筋層が存在しているが、 ヤギの食道筋層は外側に輪状筋が存在し内側に縦走筋層が存在している。加えてヤギの 筋線維の走行は後述するが輪状筋層の筋線維と縦走筋層の筋線維が複雑に入れ替わり ながら走行しているが、人間の筋線維は輪状筋層の筋線維と縦走筋層の筋線維が明確に 分かれて走行している特徴がある。- 50 - 現在の人工食道における課題点の一つは、生体食道における蠕動運動のような食物を 能動的に輸送する機能を付加していないことが挙げられる。ヤギと人間で動物種が異な るが、人工食道として求められる最も需要な機能である食物運送機能はヤギの食道も人 間の食道も備えている。また人工心臓の研究開発において、生体心臓のように拍動から 血液を循環させる拍動型ポンプと生体心臓の血液循環システムとは全く異なる血液循 環方法を用いる遠心型ポンプが存在するように[48]、人工食道の能動的食物運送機能に おいても生体食道と同様な蠕動運動を行う必要はないと考えられる。本研究ではヤギの 生体食道のバイオメカニクス的特性に基づく人工食道の食物運搬機構の構築を行った。