九州大学学術情報リポジトリ
Kyushu University Institutional Repository
浮体式海洋構造物の位置制御システムの開発研究
百留, 忠洋
九州大学総合理工学研究科大気海洋環境システム学専攻
https://doi.org/10.11501/3166891
出版情報:Kyushu University, 1999, 博士(工学), 課程博士 バージョン:
浮体式海洋構造物の
位置制御システムの開発研究
平成12年 1月
百留 忠洋
論文の目次
第一章 緒言 1
1.1 研究の背景と目的 1
1.2 論文の構成 3
第二章 浮体式海洋構造物の波浪中の運動方程式 6
2.1 座標系とオイラ一角 7
2.2 運動方程式 8
2.2.1 復万力 9
2ユ2 慣性流体力(付加質量項) 9
2.2.3 潮流の影響 11
2ユ4 運動方程式のマトリックス表現 12
2.2.5 粘性及び造波減衰力 13
2.2.6 係留ラインによる外力 14
付図CFig. 2.1 ,...., Fig. 2.7) 20
第三章 係留された浮体式海洋構造物の位置保持制御 25
3.1 2次苅係留システム 26
3.1.1 運動方程式 26
3.1.2 スラスター配置及び制御力 27
3.1.3 実験方法 28
3.1.4 運動方程式の検証 29
3.1.5 制御系の検討 30
3.1.5.1 コントローラの設計 30
3.1.5.2 コントローラによる周波数特性 35
3.1.5.3 実験方法 36
3.1.5.4 実験結果及び考察 37
3.1.6 鎖による係留の場合の位置保持実験 38
3.2 3次元係留 39
3.2.1 スラスター配置及び制御力 39
3.2.2 コントローラの設計 39
3.2.3 設計された各コントローラによる周波数特性 43 3.2.4 定常力に対する係留ライン張力の制御 44
3ユ5 実験方法 45
3ユ6 実験結果及び考察 46
3.3 結果のまとめ 48
付表CTable 3.1, Table3.2) 49
付図CFig. 3.1 ,...., Fig. 3.56) 50
第四章 無係留浮体式海洋構造物のスラスターによる位置制御 106 4.1 固定式スラスターによる位置制御 106
4.1.1 線形数学モデル 106
4.1.2 コントローラの設計 108
4.1.3 実験方法 109
4.1.4 実験結果及び考察 109
4.2 ゲインスケジューノレドH∞コントローラによる
固定式スラスターを用いた位置制御 111
4.2.1 線形数学モデル 111
4.2.2 コントローラの設計 114
4.2.3 コントローラのスイッチング 118
4.2.4 実験方法 119
4ユ5 実験結果及び考察 120
4.3 首振り式スラスターによる位置制御 121
4.3.1 コントローラの設計 121
4ふ2 制御力の配分法 122
4.3.3 スラスターダイナミックス 124
4.3.4 実験方法 125
4.3.5 実験結果及び考察 125
4.4 結果のまとめ 126
付図(Fig. 4.1 ,._ Fig. 4.53) 128
第五章 結言 181
謝辞 183
参考文献 184
図表一覧 186
第一章 緒言
1.1研究の背景と目的
本格的な浮体式海洋構造物の歴史は、6000年の歴史を持つ船と比べるとはる かに新しく、1950年代の石油掘削装置に始まると考えられる。 その後、浮体式 海洋構造物は多種多様な海洋空間の利用に伴い目覚しく発達していき、海底石 油の開発以外の方面においてもパルププラント、海 水淡水化プラント、 水産養 殖プラント、海上ホテル、ヘリポート等々で利用されてきた。 さらに近年では、
海上空港や浮体式原子力発電所としての利用計画が提案されている。
これらの浮体式海洋構造物は、海の上に浮遊しているという性質上、風・ 潮 流・波等の外乱 を受ける。 しかし、海上空港建設工事・海橋敷設工事などの海 洋土木工事用の作業台や、海底資源探査・石油掘削のためライザー管を海底下 に設置している洋上プラットフォーム等で使用される浮体式海洋構造物は、一 定の範囲内でその位置を保持することが要求される。 位置保持のシステムとし
ては現在、 次のようなものが使用されている。 (
1 )鎖等により係留する方法。,2),3),九この方法は係留作業に手聞がかかるものの、スラスターなどの推進器を 取り付ける必要がなく位置保持のためのエネルギーを必要としない利点を持つ。
しかしながら、波の変動漂流力と係留システムとの共振現象として長周期動揺 といわれる係留系の固有周期での大振幅運動が生じる。 (2 )係留による位置 保持と浮体に取り付けたスラスターによる位置保持を組み合わせたシステム (Thruster assisted mooring system)を用いる方法。 この方法では係留システ ムを 潮流・風等の準定常外乱成分に対する位置保持に使用し、スラスターは長 周期動揺などの変動成分を防止するために使用する。 これにより、係留システ ム単独の場合と比較して格段の位置保持性能を期待できる。 また、係留鎖の数 を少なくすることが可能で係留系を簡略化できる。 さらに、スラスターは起振 力の小さい長周期動揺に抗して位置を保持するだけで良いことになり、位置保 持のためのエネルギーを大幅に減らせる。 (3 )浮体にスラスター等の推進器 を取り付け、それらを制御することによって位置を保持する方法制み8),9),10)。 こ の方法では係留索を必要としないので、大水深の海域で‘の位置保持方法として 有効である。しかし、この方法では、水深による制限は受けないものの、潮流・
風などの準定常外力に対して常にスラスターを駆動し続けなければならず、位 置保持のために大きなエネルギーを必要とする。 したがって、実際にはく1 )、
(2 )、 (3 )のシステムを目的によって選択することになる。
本論文では、 高精度の位置制御が可能と考えられる(2)、 ( 3)の位置保 持システムのための、 効率的なスラスターコントローラの設計手法を開発する ことを目的とする。
1.2論文の構成
「第一章序論」では、研究の背景と目的を述べている。
「第二章浮体式海洋構造物の波浪中の運動方程式」では、 構造物の波浪中 の運動方程式を記述している。 モデルベースのスラスターコントローラを設計 するためには、 浮体式海洋構造物の運動方程式が必要となる。 この運動方程式 を基にスラスターコントローラの設計に必要な線形数学モデルが作られる。
「第三章係留された浮体式海洋構造物の位置保持制御」では、 係留された 浮体式海洋構造物の位置保持システムについて記述している。
海底と掘削用のライザー管で結ぼれている浮体式海洋構造物は、 ライザー管 を破損しないために風・潮流・波等の外乱下でもその位置を保持する事が要求 される。 このような位置保持を行う場合、 係留ラインとスラスター制御による 位置保持を組み合わせたシステムが経済的に有利で、ある。 このシステムでは係 留は潮流・風等の準定常外乱成分に対する位置保持に使用し、 スラスターは波 の変動漂流力と係留システムの共振現象である長周期動揺などの変動成分を防 止するために使用する。 波周期の運動は振幅が高々波高と同程度であり、 ライ ザー管などの許容範囲である上に、 起振力が大きく、 スラスター程度の制御力 では制御できず、 スラスターが波周期の運動に反応すると、 エネルギーの無駄 遣いになると考えられる。 そこで、 エネルギー効率の良い制御を行うためには、
波周波数領域の運動に反応しない位置制御コントローラの設計が必要となる。
本論文では、 このような効率的なスラスターコントローラを設計することを目 的とする。
浮体の位置制御を行うために従来用いられている制御系は、 海洋構造物のサ ージ、 スウェイ、 ヨーの3方向の運動の成分を、 それぞれ独立した1入力1出 力系として取り扱い、 各方向の制御をフィルターとPID制御により行う方法で ある。 この方法は、 現場でのチューニングが容易に行え、故障など対応するこ とが容易であるという利点を持つ。 しかしながら、 この方法では、 1)フィル ターによる位相遅れが生じ、 制御性能が劣化する。 2)浮体の運動を独立させ て1入力l出力系として扱う為、 スラスターの取り付け配置に制約を受ける。
3)ロール、 ピッチへの影響を考慮、できない、 などの問題を生じる。 このため、
精度の良い制御を行うためには、 これらの影響を考慮、可能な多入力多出力系と して取り扱う必要がある。 そこで、 本論文では、 まず現代制御理論であるLQI (Linear Quadratic with Integral)制御を取り上げる。 この方法では、 多入 力多出力系が扱え、 スラスターの取り付け配置への制約を受けず、 ロール、 ピ ッチへの影響も考慮、に入れてコントローラを設計することが可能である。 また、
カルマンフィルターと等価な働きをする全状態オブザーバーを使用し、観測出 力から波周波数成分を除去する事が可能であり、 制御系が位相遅れを補正でき るフィルター効果を持ち、 制御性能の劣化が少ない。 しかしながら、 この制御 理論では、 重み行列の設定や極配置の結果が、 周波数特性の改良と直感的に結 ばれにくいという面がある。 よって次に、 コントローラの設計に時間がかかる ものの、特定帯域の外乱を選択的に抑制する問題に有利で、 高度な周波数特性 の整形が可能であるH∞制御理論を取り上げた。 この方法も、 多入力多出 力系 が扱え、 スラスターの取り付け配置への制約を受けず、 ロール、 ピッチへの影 響も考慮、に入れてコントローラを設計することが可能である。 また、 この制御 理論で設計した制御系も位相遅れを補正できるフィルター効果を持ち、 制御性 能の劣化が少ない。 これら2種の制御理論より設計したコントローラと、 従来 用いられてきたPIDコントローラによる模型実験を行い、 その性能を比較した。
その結果、 H∞コントローラの制御性能が優れていることが検証された。
また、 スラスターアシステッドモアリングシステムでは、 潮流等の準定常外 乱が変化した場合、 スラスターが定常的にまわり出す。 このため、 その変動に 応じて係留ラインの長さを調節する事により、 係留張力を制御し、位置を保持 するためのスラスター推力を減少させ、 エネルギー節約の手法を提案し、 大幅 な位置保持エネルギーの減少が期待できることを検証した。
「第四章 無係留浮体式海洋構造のスラスターによる位置制御」では、 係留 ラインがない場合の浮体式海洋構造物の位置制御システムについて記述してい る。
大水深の海域で、稼動する石油掘削リグや、 海底資源探査のための試掘船や海 上工事で使用される台船などは、係留索を使用せずスラスター等の推進器を制 御することで、 風・潮流・波等の外乱のもと2次元平面内において一定位置が 保持でき、 かっ、 ある範囲内で精度よく位置を調節できることが要求される。
洋上において浮体が受ける力は、波・潮流・風による漂流力及び波による線形 波浪外力であるが、 エネルギー効率の良い制御を行うためには、波周波数領域 の運動に反応しない位置制御コントローラの設計がここでも必要となる。
使用するスラスターの種類としては固定式のものと首振り式のものが考えら れる。 固定式のスラスターを用いると複雑な可動部分を無くすことが出来、 コ ントローラの設計も比較的簡単になるという利点がある。 他方、 首振り式スラ スターを用いると、 波・潮流等の外乱の向きに全推力を集中させる事が出来、
固定式のものに比べて効率の良い位置制御が可能になる。 実際にはこの二つの システムは、 目的に応じて選択されている。
本章では、 まず、 3方向(surge, sway, yaw)の運動を制御するため、 固定 式スラスターを使用し、特定帯域の外乱を選択的に抑制する問題に有利で、 高
度な周波数整形が可能であるH∞制御理論を用い、波周波数領域の運動に反応 しない位置制御用コントローラの開発を試み、数値シミュレーション及び模型 実験を行った。 その結果、設計されたコントローラを用いるとスラスターが波 周波数領域の運動にほとんど反応せず、エネルギーを無駄遣いすることなく精 度の良い位置制御が可能で‘あることが検証された。
しかし、 このコントローラは定点保持を主体として設計されており、回頭角 指令値が大きくなると応答が振動的になり、制御性能が劣化してしまう。 この ため、操業開始時や移動を要する場合等、 回頭角指令が大きくなる際には問題 を生じると考えられる。 そこで、コントローラの性能の向上を計るため、大き な回頭角指令に対応できる、ゲインスケジュールドコントローラの開発を続い て行い、シミュレーション計算・模型実験によりその性能を確認した。
さらに、波・潮流等の外乱の入射方向の変化に応じて、スラスターの方向 を 変えることのできる首振り式スラスターを用いて浮体の位置制御を、 固定式ス ラスターとの制御性能を比較検討した。
「第五章結言」では本研究で得られた成果をまとめた。
第二章浮体式海洋構造物の波浪中の運動方程式
本論文で開発される位置制御用スラスターコントローラは制御対象の線形数 学モデルを基にして設計される。 そのため、 浮体式海洋構造物の運動方程式が 必要となる。 本章では、 浮体式海洋構造物の運動方程式を導出する。
記号表
A Aij Aw bij bijv
CDx' CDy' CDz, CDM
F;cm � Mrm FZD~M由 F xwave1 � M zwavel F xwave2 � M zwave2 Fxr;, Fyr' M H
g GM GML lx:x, lyy, lzz
k
lx,ly
L
m
(0, X, y, z) (O,X, Y, z) p, q, r
T1 U, V, W Ua,νa' Wa Uc' Vc' Wc Uwc' VwC) Wwc K
(0,0, zG) Zr
:喫水線下の側面の投影面積x2 :浮体の付加質量
:浮体の水線面積 :浮体の造波減衰係数
:浮体の振動流成分に対する粘性抗力係数 :浮体の定常流成分に対する粘性抗力係数 :係留ラインによる外力
:粘性及び造波減衰力 :線形波浪外力
:変動波漂流力
: x,y軸方向及びz軸まわりの制御力
(スラスターが発生しなければならない制御力) :重力加速度
:浮体の横メタセンター高さ :浮体の縦メタセンター高さ :浮体の慣性モーメント :バネ定数
:バネの初期長さ
:定常流成分に対する粘性抗力の着力点の
。点からの距離 :浮体の全長 :浮体の質量 :物体固定座標系 :空間固定座標系
:物体固定座標系における角速度成分CFig.2.1) :バネの初期張力
:物体固定座標系における速度成分CFig.2.1) :相対速度成分
:物体固定座標系における潮流速度成分 :波粒子速度成分
:潮流速度 :重心の座標
:Z軸方向の原点。からスラスターまでの距離
。。
今、(), lf
P Q
ウMσb E且(mp
角角
行射一度換
のイの標 入ラ密変
波オ水座
2.1
座標系とオイラ一角
浮体式海洋構造物の運動方程式を導出するための座標系をFig. 2.1に示す。
空間固定座標系Q-XYZと、 浮体式海洋構造物の水線面積中心。点を原点にお いた物体固定座標系0-砂zは、t=O (sec)のとき一致しているとする。 また、 潮流 の速度をv:、 波・潮流が空間固定座標系のX軸となす角度をそれぞれ向、 αと する。
空間固定座標系と物体固定座標系との関係は、 オイラ一角妙、 θ、 vを用い て次のように与えられる。
(2.1)
I
cosθroslf c�θsin lf -sin() I
[0]
=I
siけsin() cos lf - cos ø sin lf sin ø sin () sin lf + ros ø cos lf siリCOSθ|
I
cosøsinθcos lf + sin ø sin lf cos ø sin () sin lf - siリcoslf cos ø cosθ|
(2.2) 物体固定座標系においてx,y,z軸方向の速度をU, V,Wとし、x,y,z軸回りの角 速度をp, q, rとすると、 空間固定座標系から見た海洋構造物の位置及びオイラ
一角は次式より求まる。
[rl叶:l
(2.3)fl [
1 Mtm MS4吋
θ =
10
cosø -sin砂 xl q (2.4)ψ o
sinゆsec() ∞sØsecθ r2.2運動方程式
浮体は位置指令により、 その位置を変化させる ので、 運動方程式は物体固定 の動座標系で考える。 また、 浮体に働く流体力を求める場合にも、 各種の係数 は物体に固定した座標系で表す方が便利なことが多い。 浮体式海洋構造物は前 後、 左右対称に設計されている場合がほとんどなので、 慣性乗積1xy, 1yz' 1x:zを ゼロとすると、 重心Gに原 点をおいた物体固定座標系での運動方程式は次式で 与えられる。
m(ú +qw-rv) = Fx m(v+ru -pw) = Fy m(ル+pv -qu) = Fz
1x:x戸+(1 zzーら)qr=MX 1 yyi}+(lx:x -lzz)ψ=My 1 zz; + (らーら)pq=Mz
(2.5) (2.6) (2.7)
(2.8) (2.9) (2.10)
次に、 座標系の原点を水線面積中心のo点(Fig. 21) に移す。 。点から見た ときの重心の座標を(0, 0, zc)とし 、 o点での速度を(uo, vo, wo)、 o点まわりの
モーメントを(Lo,Mo,No)とすると、 次式が成り立つ。
Uo = u -zcq I Vo =ν+zcpr Wo =w J
Lo = M x -ZCFy
I
M。二My +zcFxト No = Mz
J
(2.11)、(2.12)式を、(2.5) ,...., (2.10)式に代入すると次式のようになる。
(2.11)
(2.12)
mい。+zcq+qw。一昨。-zcp)} = Fx (2.13) mか。-zc戸+r(uo+zcq)-pWo}= Fy (2.14) m{wo + p(vo -zcp)-q(uo +zcq)}= Fz (2.15)
(1 x:x + mz�)β+
七
一(1yy +mz�)k
r -mzc(vo +町一pWo)= Lo (2.16) (1 yy + mz� )q +札
+mz� ) - 1 zz}
p + mz c (日。+qwo-rvo) =Mo (2.17)1 zz; + (1万一1x:x )pq = No (2.18)
o点を通るx軸、y軸まわり の慣性二次モーメントを改めてら,らと表し、uo,vo,
wo, Lo, Mo, Noも改めてU,v, w, Mx' My, Mz と表すと、次式のようになる。
2.2.1 復元力
mい+qw-rν+zG(pr +q)}=え m{v +
ru-
pw+
Z G (qr- þ)}
= Fym{w+ pv-quーら(p2 +
q2)}
= F z1;0戸+ (1 rz -1 yy
)qr - mZG(v
+ ru - pw)=
M x1 yyq + (1;0 -1rz)rp +mzG(u +qw-rv)
=M y1 rzr
+ (ら-1
;o)pqごM z(2.19) (2.20) (2.21)
(2.22) (2.23) (2.24)
次に重力成分(乙G,FyG' FzG,MxG,MyG,MzG)及び浮力成分(f必死B' F ZB' M XB' MYB' MzB) について考える。空間固定座標系で の重力(0,0,mg)、浮力(0,0,p 'ilg) は、
(2.1) 式によって次式のように物体固定座標系に変換される。
FxG
+
FxB= -(m
-pV)g sinθ (2.25) F YG+
FyB =(m
- pV)g sinゆ∞sθ (2.26) FZG+
F zB= (m
- pV)gcos砂∞sB (2.27) MxG +MxB =一(mzG - pVzB )gsinØcosB (2.28) M yG + M yB= -(mzG
- pVz B )g sin B (2.29)M zG
+
M ZB=
0 (2.30)ここでマは排水容積であり、(0,0, ZB) は浮心の位置である。 上式において、
久ZBは 浮体の運動に伴って時々刻々変化するため、 これらを正確に計算する ことは困難で・ある。 そこで、 文献[11]に示されている浮体の運動方程式を参考 に次の近似を導入する。
FxG +FxB = 0 F YG +FxB = 0 FZG
+
F ZB=
-pgAwZMxG +MxB =一mgGMsinØ M YG +M YB =一 mgGMLsinB
2.2.2 慣性流体力 〈付加質量項)
(2.31) (2.32) (2.33) (2.34) (2.35)
(2.13) '" (2.18)式の右辺の外力のうち、慣性流体力(九], F YI' F ZI' M;cb MYI' M ZI)
について考える。 これは、 文献[12] �ご以下のような公式が与えられている。
Fj = -UjAjj
-e〆Jjo.A;'Au (2.36)
M j = -UjA j+3,i - e
jA;JU jo.A; A
l+3
•j - ejぷJjUA;Au (2.37)
ここでiは1---6をとり、j,
k,
1は1---3をとる。 また、U1=u, U2=V, U3= w 0.1 =U4 = p, 0.2 =U5 =q, 0.3 =U6 =r
1+1 jkl = (123,23l,312) e
jk1=イ-1 jkl = (132,213,321)
I 0 j =k,k=l,l=j
ここで、 添字1は前後揺、 2は左右揺、 3は上下揺、 4は横揺、 5は縦揺、
6は船首揺を表す。
海洋構造物の断面形状は左右対称、 前後対称であるので、 流体力の連成力の
うち微少であるとして無視できる項がいくつかある。 これらを考慮、して、 この
公式を、具体的に書き下すと次のようになる。
F1 = FxJ
=ーい11+ qwA33 -rvA22 -p叫 (2.38)
F2 = Fyl
= -{vA22 + ru.A11 - PWA33 + qrA15 +戸vt24} (2.39) F3 = Fzl
=ーい33+ P的-qu.Au + P2A24 -q 2 A15} (2.40)
Ml=MxJ
--抑制+qr (ゐ-A55) + VA42 -ru.A51 -pwA24 + V W (A33 -A22)} (2.41) M2 =MYl
= -{I似55+伊(A44-A66) + ûA51 + qwA15 + rvA42 + uw(An -A33)} (2.42) M,,=M _,
u= - { M “+pq(A55- 4)+pu(A51+AM) -qv (A42+Au)+W(An-An)) (2 43)
潮流の影響
2.2.3
次に潮流がある場合について考える。 潮流の影響は、運動方程式を相対速度 及び相対加速度の関数として表すことにより組み入れる事ができる。 潮流は、
空間固定座標系での速度予2と入射角αで‘与えられるが、それらをx、y平面内 で考えると物体固定座標系で潮流速度成分(Uc' VC)
w
Jは、(2 ,1) 式より(2.44)
「lilll111l」
α
s
c ω・m α
nu v
cv
c一 一 FIll--lal--』 × 、E・・・』 bL 一一 寸111BIlli--J
do d ν ν
「ーー111111L × 可・1』 Q r・--L 一一 寸1111111111」 u
c「lillit--・・lsl」 h w
c(2.45)
Uc = -Vc
c
osθcos('I'-α) 1
h=一川sin砂sinθ∞s('I' - α) - cosØsi的/ーα)
}ト
Wc=-
け
∞søsin B∞s('I' -α) + sinゆsin('1'-α) }J
したがって、
浮体式海洋構造物と潮流との相対速度 (Ua, Va, Wa) は、次式のようになる。
(2.46) Ua =
u
-u
c Iva=ν-Vc � Wa =W- WcJ
次に、相対加速度はVc' a が0であると仮定すると次式のようになる。
(2.47) uc=一(qwc - rvc)
1
oc=一(r
u
c- pWc)ト
ルc 一(pVc - quc)
J
Ua=U-Uc' Va =V-Vc' Wa =WーれFC
(2.38)
,._
(2.43)式を(2.19),._
(2.24)式に代入して潮流の影響を考慮して整理 すると、運動方程式は次式のようになる。(m + An)U + (mzG + A1S)4 =え (2.48)
FL=一(m + A33)qwa + (m
+
A22)町一(mzG - A24 )pr - (m + An )(qwc - rv c) (2.49) (m + A22)v + (-mzG + A24)Þ = Fy (2.50) Fy=一(m + An)ru
a + (m + A33)PWa 一 (mzG + A1S)qr - (m + A22)(ru
c - pWc) (2.51)(m+Aρル= Fz (2.52) Fz=一(m+ A22) pv a + (m + All )qu a + (mz G -A24 ) P 2 + (mz G + Aρq2
一(m+A33)(PVc -quc)-pgAwZ (2.53)
一(mzG.-A24)v + (1.n: + A44)戸= M-l (2.54) M -l = (mzG + AS1)rua一(mzG-A24)pwa -
k
1 zz + A“)一(lyy+ Ass)}J
r一(A33-A22)vawa + (mzG -A42)(ruc -pWc)一mgGMsin ø (2.55)
(mzG + A1S)Ú + (1刀+Ass)q = M y (2.56) My =一(mzG+Aρqwa + (mzG -A42)rv a一(All -A33)ua wa
一{(I.n:+A44)-(lzz +A“) }rp -mgGML sin () (2.57) 一(mzG+ AS1)(qwc -rvc)
(1 zz + A“)が= Mz (2.58)
Mz = -
k
1刀+Ass)一(1.n:+ A44)}
pq一(A22 -All )u a九一(A24+ AS1)pua + (A1S + A42)qva (2.59)
2.2.4運動方程式のマトリックス表現
(2.48)、(2.50)、(2.52)、(2.54)、(2.56)、(2.58)式の右辺に粘性及び造波減衰力、
線形波浪外力、 変動波漂流力、 係留ラインによる外力、 スラスターによる流体 力を加え、 マトリックス表現すると次式のようになる。
m+All 。 。 。 mZG +A1S 。 u F-l
。 m+A22 。 -mzG +A24 。 。 ν Fy
。 。 m+A33 。 。 。 w Fz
× 一一
。 -mzG +A42 。 1.n: + A44 。 。 p MJ
mZG +ASl 。 。 。 1 yy + Ass 。 q M)
。 。 G 。 。 1zz +A“ r M2
(2.60)
FZ= 一(m+ A33)qwa + (m + A22)rva
一(mzG -A24)pr-(m+All)(qwc -rvc) (2.61) + F zl) + F xwavel + F xwave2 + F xm + F;
Fy= 一(mzG +Aρqr + (m + A33)PWa 一(m+ A22 )(ruc -pWc)一(m+ All)rua + FyD + F )"NQvel + F )"NQve2 + Fym + Fyr
Fz = -(m + A22)pνa + (m + An)qu a + (mz G -A2A ) P 2 + (mzG + A15)q 2一(m+ A33)(PVc -quc) -pgAwZ +FzD +F:川町1+ F zwave2 + F zm
Mx= 一(mzG-A2A)pwa -k1 zz + A“)一(1刀+Ass)}Jr 一(A33-A22)νa Wa + (mzG -A42)(ruc -pWc) + (mzG + AS1)rua一mgGMsinrþ
+M必+M xwavel + M xwaνe2 + M X17I -ZrFyr Mv ' = 一(mzG + A1S)qwa + (mzG -A42)rva
-(A11-Aぉ)uaWa-{(1.a +A44)-(1zz +A“)}pr 一(mzG + AS1)(qwc -rvc)一mgGMLsinB
+M_yD .... +M_____' �'A )"NQνel _. +九f' �'A �匂ve2今 +. M�.-ym .._ + z...F ' -1"
M z = -
k
1 yy + Ass )一(1.a +A44)}pq一(A2A+ AsJpua + (A1S + A42)qv a一(A22-Al1)(uv -uvc -ucv) + M ZD + M zwavel + M zwave2 + M zm + M(2.62)
(2.63)
(2.64)
(2.65)
(2.66)
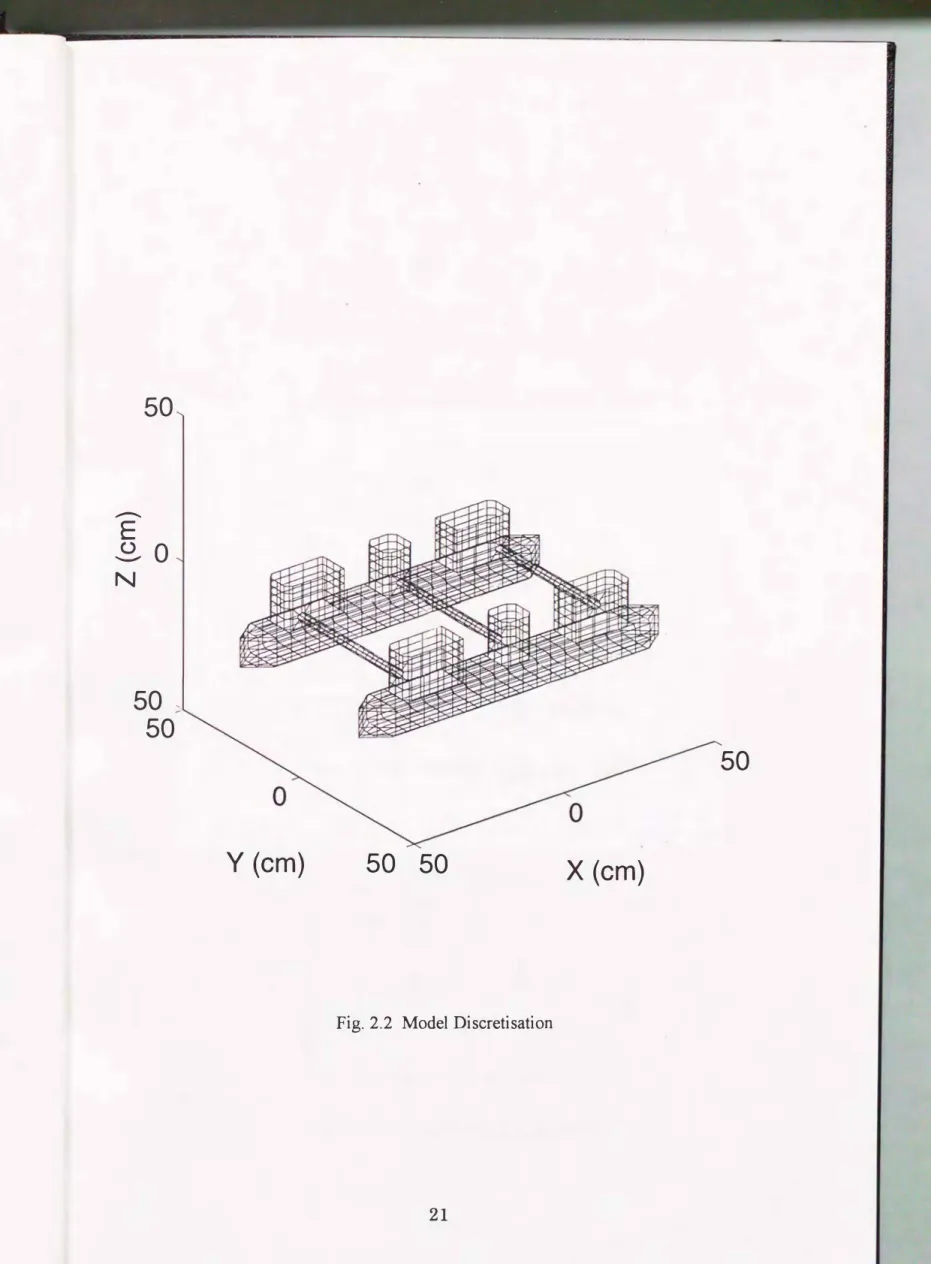
浮体の付加質量及び波浪外力は、 三次元特異点分布法的を用いて計算した。
Figユ2に計算に使用したパネル分割〈要素数=1564)を示す。 不規則波中の線 形波浪外力は、不規則波をフーリエ級数展開を利用して成分波に分解して、 各 成分波ごとの線形波浪外力を重ね合わせることにより求めた。 また、 変動波漂 流力はHsuの方法叫均に従った。 この方法は、不規則波の連なりを半波長ごと に波高と周期が異なる規則波の連なりとみなし、 半波長ごとの規則波の漂流力 の連なりを変動波漂流力とする方法である。 減衰力 FxD ,_ MzD、 係留ラインに よる外力FX17I ,_ Mzmについてはそれぞれ以下のように示す。
2ム5 粘性及び造波減衰力
減衰力は、 粘性抗力及び造波減衰力の和として表される。 粘性抗力は潮流速 度と浮体運動速度との相対速度を使用して表すべきであるが功、 次式のように 定常流成分と振動流成分の和としてモデル化できると仮定した。
F泊=-b1ん-b1Sq+ 1 � pACDx叫ん 1-buv (u -uwc)
2 (2.67)
1 . � I
FyD = -b'22Ya一九q+
E PAC均VcIvc卜b22v (νーにc) 九=-M+
;
μωcl
wc卜
b33v (w - wwc) Mψ= -b44P - b4242 V 一r a 2�1 pA C [)y v cI
v c1I
x一九νP均CI C
M vD = -bssq -bs仇 キス1 ACDxp uc
ヤふ
-bssvqL.
Mru-
i
pAC山?+か九r(2.68) (2.69) (2.70) (2.71) (2.72)
造波減衰力係数は、三次元特異点分布法13)を使って計算した。造波減衰力係 数の値は、周波数により大きく異なり、粘性抗力係数は波周波数領域の値と長 周期動揺(長周期動揺が波周波数運動及び波と共存する場合〉の値で異なる功。
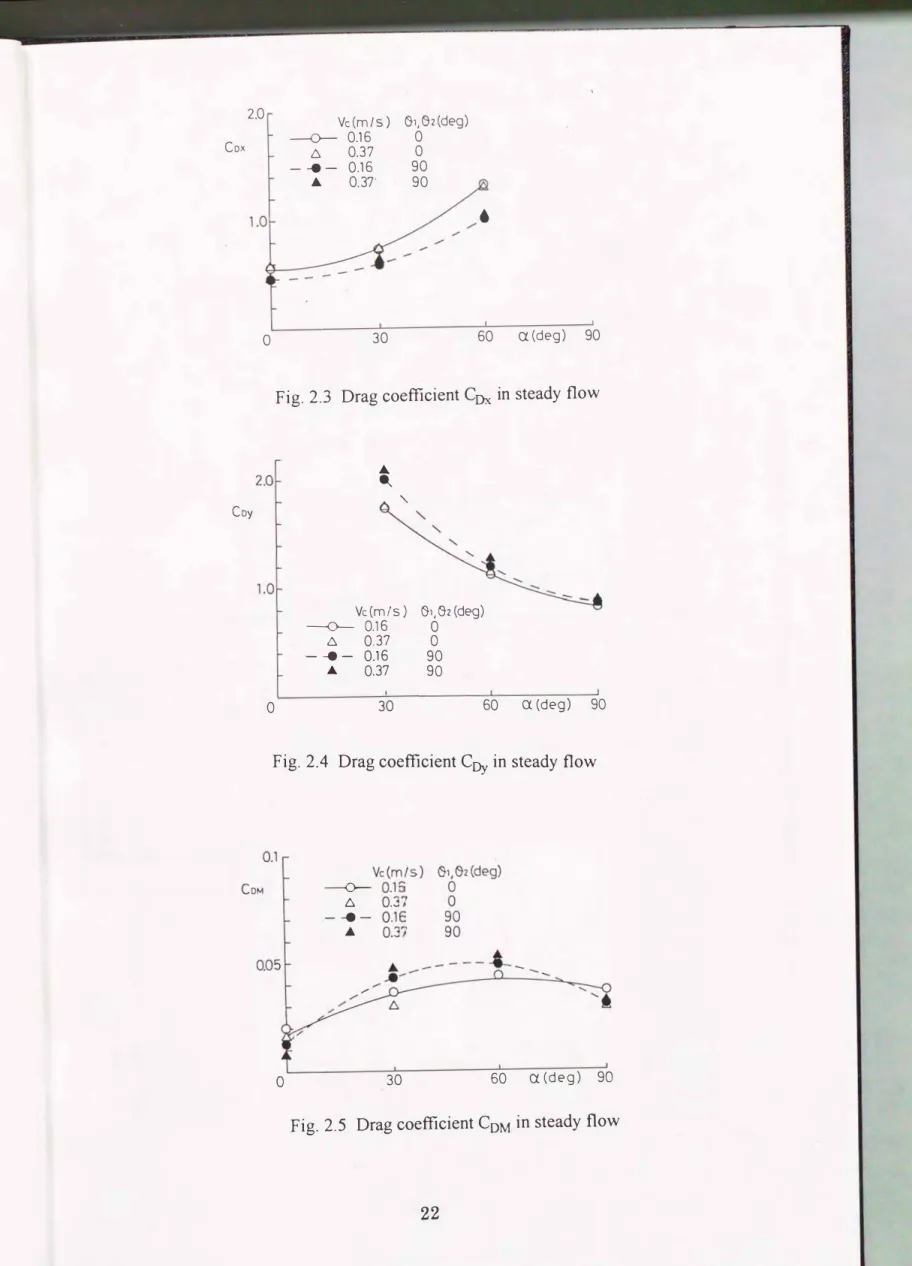
本研究では、長周期動揺周波数での値を使用する事にする。減衰力が運動に影 響を及ぼすのは、主に共振時であるので、代表周波数をどの値(平均波周波数 または長周期動揺周波数〉にしても、計算で使用した半潜水式海洋構造物の場 合、波周波数領域での応答はほとんど変わらない令。bllν � b66v などの振動流 成分に対する粘性抵抗係数の値は、 自由動揺試験の結果より求めた。定常流中 の粘性抵抗係数は抵抗試験により次式で求めた値を使用した日)。
C九一一 Fxexp 山 0.5pA�う2COS2α C九一一 Fye勾 .
勾 0.5ρ4FC2siI12α (2.73)
C nll =
__!_1
ze却D M - 0.5ρ4LK2
但し、F見守, Fya:p, M zapは、それぞれ実験により計測されたx,y軸方向の力、
z軸まわりのモーメントである。結果をFig. 2.3�2.5に示す。数値シミュレー ションには、それぞれの外力の入射角αにおける値を使用した。また、CDzに ついて垂直方向の潮流成分は小さいと考えられるのでoとする。
また、無係留浮体の場合、 ロール、 ピッチの振動流成分に対する粘性抵抗係 数の値は、 自由動揺試験の結果より推定した値を使用し、他の値は係留浮体の 場合の値を流用した。定常流中の粘性抵抗係数については、それぞれの外力の 入射角αにおける値を使用して数値シミュレーションを行った。
2ム6 係留ラインによる外力
無係留浮体では係留ラインの影響がないのでこの項はOとなる。
[係留鎖を使用して係留する場合]
不規則波中の係留浮体の運動を解く場合、係留鎖の動的変動張力をランプ ド・ マス法のような数値計算法を用いて計算すると非常に長い計算時聞を必要 とする。周波数領域の計算では係留鎖の動的変動張力を求めるのに簡易計算法問 が計算時間も短く、 精度も良いことが検証されているので、この手法を時間領
域の計算で適用できるように変形したものを使用した。
Fig.
2.6において鎖の単位長さあたりの要素に働くみ方向の流体力LlFvdは慣
性力、抗力の和として次式で求められる。
ð.FVd = -zc(ð.M +舛VC A)-"2〆DM 1
coωlJZcJzc (2.74)
ただし、LlM は単位長さあたりの鎖の質量、LlVは単位長さあたりの鎖の体 積、LlA は単位長さあたりの鎖の投影面積、Gは鎖の付加質量係数、 CDは鎖の 抗力係数、 ρは水の密度で、ある。
したがって、 係留鎖全体に働く流体力F凶はカテナリーの長さをSwとすると
ん= J: w�叫V阿d
=
Jo(sw[-Ec(AM+凶VG)
L L " , n "- 1〆DM∞ωl 2 JZcJZJゐ
(2.75)
となる。LlM、LlV...LlA、 CρCDは係留鎖全体にわたって一定であるとし、さ らに
。唱.. 二tan-1
!!_
y WO
とすると、(2.75)式は次のようになる。
(2.76)
Fw=-(AM+PUCA) 拘 S V-ゐ 1〆DM∞伐 c- -- 2
r -U 1C itc i tcゐ (2.77)
J
ここで、
Em= 訂 wEcゐ (2.78)
|らJZm= 訂 WJ人Jzcゐ (2.79)
とおくと(2.77)式は
ん=一例+ pVCA)2mー
ド
DAc刈
iml
im (2.80)となる。た だし、 M=ð.MxSw 、V=LlVxSw、 A=ム4xSwである。
次にら、 2mを求める。時刻tにおける平均の高さzLは次式で表される。
z� =土 rSwlztds '" SwJO
=笠主任 s凶 笠-5凶 空 : +笠)
SwO l 4 a f a I 2a I )
(2.81)
、しだた
〆=(T HO + CyyLlYmL - Cyz tJ_ mL) / Wc (2.82)
丸山
(2.83)Sw =
�
(h - tJ_mL)(h - tJ_� +ゐ) (2.84) CYY' Cyzは係留鎖の等価線形バネ定数、Wcは係留鎖の単位長さあたりの水中 重量、THOは初期水平張力、S刈は初期状態、のカテナリーの長さである。(2.81) 式においてz;を求めるときにS凶で割っているのは、 初期状態のカテナリーの 移動を常に考えていることを意味している。L1YmL、 L1ZmL は空間固定座標系に おける波下側の係留点の初期状態からの移動量である。この係留点の位置は次 のように表される。「1111111Jvl U F b
m m VJ Z
「Ill111lL × Q ,・・・・a--
+「Ill1114
YZ
FI--ll'l」
一=一寸|lll11!.lJ F M F u
m m
Y一Z
FtE1it--ーーし
(2.85)
(ymL' ZmL)は物体固定座標系における波下側の係留点である。
波下側の係留鎖変動張力の垂直成分F比は
F陀=-CZZtJ_mL +C}ZLlYmLzz ... '-' mL ' '-'yz�'" mL -F;附L (2.86) となる。また 、 係留鎖に働く垂直方向の流体力が連成バネ定数Cyzにより水平 方向に伝えられると考えると、 変動張力の水平成分F庇は次式で表される。
Fm=-HL c aY +C '-'yy�'" mL ' '-'yz
AZ
'--"'LJ mL+EE
'_" L E
(2.87)波上側の変動張力 の垂直成分Fvwと水平成分FHWも同様にして計算できる。
空間固定座標系における張力(�肋FVL)、(F}[W, Fvw)を物体固定座標系の張力(Fymu FzmL)、 (FymW'Fzmw)に変換すると、
[21-hi×[2]
[どJ=ドlx[::J
となる。 よって係留鎖による張力は次のようになる。
(2.88)
(2.89)
Fym
=
2F戸+ 2Fymw (2.90)F zm
=
2F ZmL + 2F zmW (2.91)M xm = -2ZmLFymL -2zmWFymw + 2y叫FzmL + 2YmwF zmW (2.92)
[線形バネを使用して係留する場合]
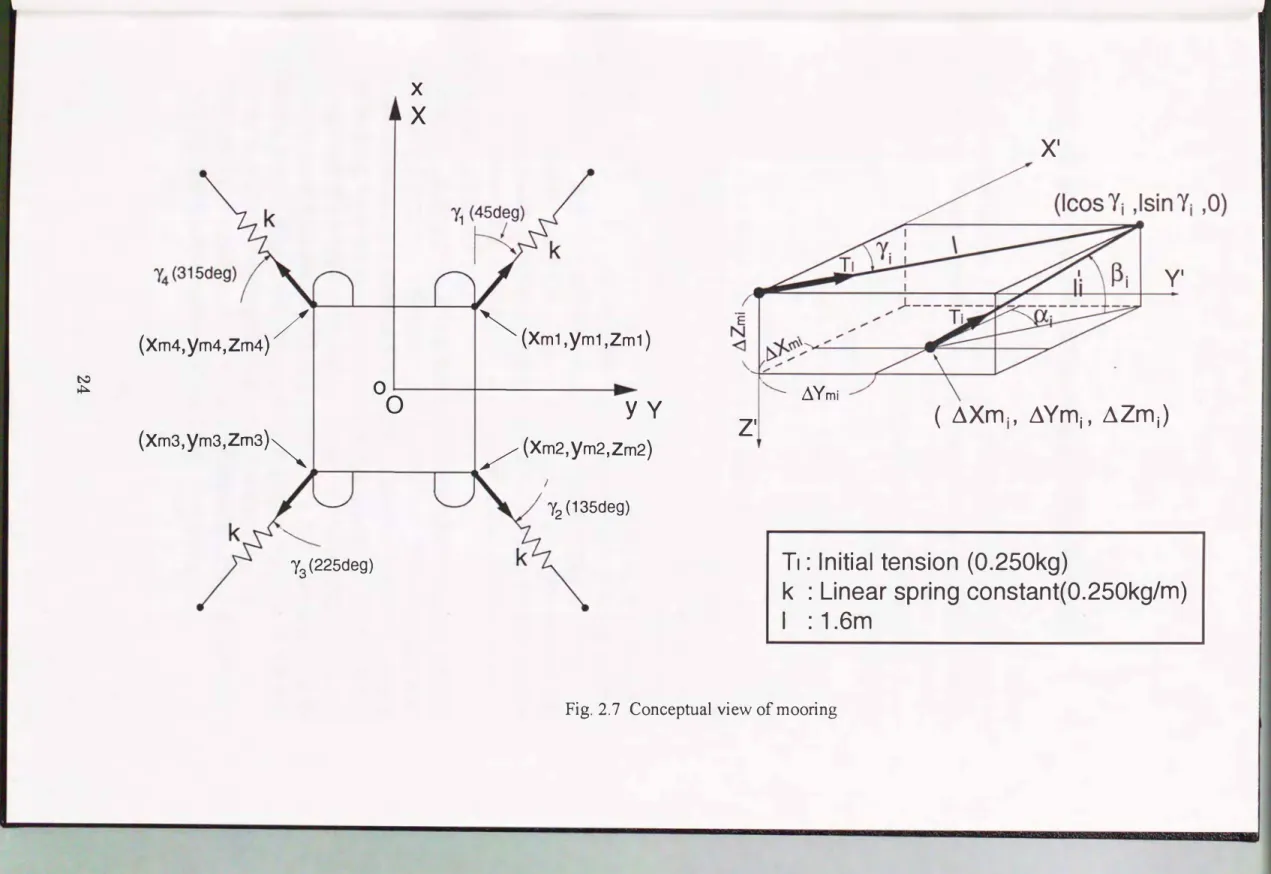
係留点の空間固定座標系CFig. 2.7)における位置(Xmi 'Ymi ,Z mi )は次式で与え られる。
(2.93)
(i=1'"-4)
(Xmi 'Ymi ,Z開)は物体固定座標系における係留点の座標である。 係留点の空間 固定座標における位置が初期位置から(Mmi'�Ymi'�mi)移動したとすると、 張
力 (TXi,TYi,TZi)は次式で表される。
TXi = 1'; cosßi∞sα入 TYi =ξcosβi sinaiト TZi = -1'; sinβi J ξ= T1 + (/; -/)k + �1';
ト
J(l
∞sri -Mmi)2 + (1 sinri _�Ymi)2 +(Oi -�mJ2(2.94)
(2.95) (2.96)
l sinri -�Ymi smαi =
[<ï
∞sri -Mmi)2 + (lsinri一企九)2OSα 1 cosri -Mmi
I
�
(I∞sri -M mi)2 + (1 sin ri -�YmJ2叫 =
半
n ゾ(1∞syi-AXmi)2+(1 sin ri -�Ymi)2
cos Pi = 1
(2.97)
(i=l "-' 4)
また、 �T;は後に示す ように係留ラインを巻き取ったときの張力変化分であ る。 求まった張力(TxpTypTzJを物体固定座標系に変換すると
(i=1"-'4)
となる。 従って、係留ラインによる外力は以下のようになる。
F xm = F xml + F xm2 + F xm3 + F xm4 Fym = F.川+FYm2 + F ym3 + Fym4 F zm = F zml + F zm2 + F zm3 + F zm4
M xm = -ZmlFyml - Zm2Fym2 - Zm3Fym3 -yml ....m2.... ym2 Zm4Fy.
+YmlFzml +ym2Fzm2 +Ym3Fzm3 +Ym4Fzm4
M ym = zmlF xml + zm2F xm2 m2'" :0胃2+ zm3F xm3 + zm4�
- xm1F zml - xm2F zm2 zm2 - xm3F zm3 - xm4F zm4
M zm = -ym1Fxm1 - Ym2Fxm2 - Ym3Fxm3 - ym4Fxm4 +x_.F._. +X巧F.2'" ym2 ' ""'m3.... ym3 _"+x_"F...." +X ' ""'m4.... y .F
(2.98)
(2.99) (2.100) (2.101) (2.102) (2.103) (2.104)
第三章では、数学モデルの簡単な線形ノくネによる2 次元状態係留システムに ついて位置制御用スラスターコントローラを設計し、数値シミュレーション及 び模型実験により、制御手法を検討する。 長周期動揺に関しては浮体の減衰力
が非常に小さいために係留鎖に働く抗力が運動の減衰力の重要な部分を占め、
長周期動揺に大きな 影響を及ぼす。 このため、係留鎖の動的影響を無視するこ とは出来ない。 そこで次に、鎖による係留システムについて位置保持実験を行 い、係留鎖の動的影響が制御性能に与える影響を検討する。 最後に3 次元状態
たコントローラが有効に働くことを検討する。 そのため、 係留鎖による外力は 2次元状態のみ記述し、線形ノくネによる外力は3次元状態で記述している。
gω判的hmω 一戸時ロロピ00υ目 . N ・ ∞一同
(。〉)日一 (J)ω
50
nv (ε0)N
50、
50
50
Y (cm) 50 50 X (cm)
Fig. 2.2 Model Discretisation
2.0 Vc (m /5) C:h, 62 (deg)
一一-0-ー 0.16 0
ム 0.37 0
- -e- 0.16 90 企 0.37・ 90 Cox
•
。 30 60 α(deg) 90
Fig. 2.3 Drag coefficient CDx in steady flow
(oy
 ._
\
\
Vc(m!s) c:11,θ2 (deg) 一-0一一 0.16 。
ム 0.37 。
- -e- 0.16 90
d‘ 0.37 90
。 30 60 α(deg) 90
Fig. 2.4 Drag coefficient
C同/
in steady flowd
ae i
e一
MW
一一
命 ))
OO 一 一 h pftrtnヨQu . 戸、 -
3
J U
リ6げ6η/小 引 rh 引 ぶ
企
S
?? Vψ
ハU
FU
。 30 60 α(deg) 90
Fig. 2.5 Drag coefficient CDM in steady flow
ヘ
エニ
t、D�
(X叫抑制)ノ
(Xm3,ym3,加)�
"{3
(225deg)
。。
x
x
'" (Xm1 ,ym1 ,Zm1)
YY
〆/ (Xm2, ym2,Zm2) 五(135deg)
X'
Y'
qw?と/
Z'
t,.Ymi
( �Xmj, �Ymj,企Zmj)
TI: Initial tension (O.250kg)
k : Linear spring constant(O.250kg/m) I : 1.6m
Fig. 2.7 Conceptual view of mooring
一一一一一一一」
第三章 係留された浮体式海洋構造物の位置保持制御
海洋石油の掘削や資源探査のためには、浮体式の構造物の使用が不可欠であり、
多くの浮体式海洋構造物が稼働中である。 これらの浮体式海洋構造物は、海底とラ イザー管によって結ぼれているため、ライザー管を破損しないためには、潮流・風・
波等の外乱下でも、水深の5%以下の精度で位置を保持することが要求される。 こ のような位置制御を行う場合、 係留ラインと、スラスター制御による位置保持を組 み合わせたシステムが経済的に有利であると考えられる。
本章では係留による位置保持と、スラスター制御による位置保持を組み合わせた システム〈スラスターアシステッドモアリングシステム〉のスラスターコントロー ラの設計・ 数値シミュレーション及び模型実験について述べる。 このシステムでは、
係留を 潮流 ・ 風等の準定常外乱成分に対する位置保持に使用し、スラスターは長周 期動揺を防止するために使用する。 これによりスラスターは、風・波等による変動 漂流 力などの変動成分に抗して、位置を保持するだけの推力を発生するだけで良い ことになり、 位置保持のためのエネルギーを大幅に減らし、かっ、 係留単独の場合 に比較して格段の位置保持性能を期待できる。 ただし、波周期の運動は起振力が大 きく、スラスター程度の制御力では制御できず、ライザー管等の支持装置や稼動条 件の設定などで対処するべきであり、 スラスターが波周期の運動に反応すると、 エ ネルギーの無駄遣いになると考えられる。 そこで、エネルギー効率のよい位置保持 制御を行うためには、波周波数領域の運動にスラスターが反応しないようコントロ ーラを設計する必要がある。本章ではこのような効率的なスラスターコントローラ を設計することを目的とする。
まず最初に、通常行われるように、数学モデルの簡単な線形ノくネによる2次元状 態係留システムについて、 位置制御用スラスターコントローラをPID、Iβ1I (Line訂 Quadratic with Integral)、見。制御理論を用いて設計し、数値シミュレーション計算及 び模型実験によりそれぞれのコントローラの性能を比較検討した。長周期動揺に関 しては浮体の減衰力が非常に小さいために、係留鎖に働く抗力が運動の減衰力の重 要な部分を占め長周期動揺に大きな影響を及ぼす均。 このため、 係留鎖の動的影響 を無視することは出来ない。 そこで次に、鎖による係留システムについて位置保持 実験を行い、 係留鎖の動的影響が制御性能に与える影響を検討した。
最後に3次元状態での数値シミュレーション及び模型実験を行い、横波以外の外 乱下でも本章で開発したコントローラが有効に働くことを検討した。
25
一一一一一一一」
3.1
2次元係留システム
まず、数学モデルが簡単な2次元係留状態〈構造物に対して、外力が900 の方向 から入射する場合で、スウェイ、ヒープ、 ロールのみのy-z平面での運動になる。〉
において、係留鎖の動的影響を考慮、に入れて構築した運動方程式の精度を確認し、
制御方法について検討を加えた。
3.1.1
運動方程式
第二章の運動方程式より、 y、 z軸およびx軸回りのモーメント成分を取りだす と、 浮体式海洋構造物の2次元状態における運動方程式は以下のようになる。
空間固定座標系と物体固定座標系との関係は、 オイラ一角併を用いて次のように 与えられる。
l; J =わlxl�J 叫:;立!
(3.1)
(3.2)
また、空間固定座標系から見た構造物の位置及びオイラ一角は次式のように表せ る。
「ESIlli---v w
FIllip-ーし × bt 一一 寸l111114 ・
・Z Y
「lIll1111」
(3.3)
中=p
(3.4)次に、 係留された浮体の運動方程式を示す。
m叫
。
一一' ー
。
(3.5)
m+A33
0
一一一一一一一一一一一一一圃一一一一・・圃幽・回・
一一ー�ー‘==・・旬圃圃司剛.圃白=志 一司ー I
ーーーーー』 ーー一一一一→一一一----一ー一一一一ーーーー一一一一一一一一一ーー ニE二--ニ--.・・圃 圃園田
Fy = (m + A33)PWa -(m +ゐ)qwc + F yu n + -F_ �匂vel__ _. + -F�惚νeL.司+-F.._ +F'L ym rn
FL= 一(m+A22)pνa + (mzG - A24)p 2 + (m + Aρpνc -pgAwZ + F ZD + F zwavel + F zwave2 + F zm
MX= 一(mzG - A24)pwa - (mzG - A42)PWc 一(A33 - A22)九円一mgGMsinゆ
+ M XD + M xwavel + M xwave2 + M xm -ZTFtlr 添字2は左右揺 3は上下揺4は横揺を表す。
3.1.2 スラスター配置及び制御力
(3.6)
(3.7)
(3.8)
実験には1/100模型を使用した。模型実験に使用した浮体式海洋構造物模型〈全 長: 1 m、 全幅: 0.64 m、排水量: 38.0 Kg)を Fig.3.1 に示す。 スラスター配置に 関しては、一般的には4機以上の複数のスラスターを用いることが多いと思われる が、 実験装置の都合上2機とし、 対角線上に推力がy軸と平行になるように配置し た。 1機のスラスターは、少なくとも2機分の推力を発生しえる大きさのものをこ こでは想定している。 そのため、 プロペラの直径が大きくなっている。 また、 スラ スターの1機あたりの最大推力は、実機に換算して100tonのものを想定している。
模型スラスターについて性能試験を行い、Fig.3.2に示す結果を得た。横軸はスラ スターへの流体流入速度予ミである。推力が0.1kg 以下では流体流入速度影響は小さ く、 最小自乗法により次に示すスラスターへの入力電圧と推力の近似式を得た。
九=5.4377
Ji可
×んII
Ftlrl
(3.9)模型スラスターの場合、入力電圧に対する推力は入力とほぼ同時に発生する〈時 定数が非常に小さしリが、実機の場合は大きな時定数を持つ。そこで実機の儲�21)を 考慮、し、 時定数Tt}r =0.7秒の一次遅れで推力が発生するようにして実験を行った。
27
d _ 1 � 1
�F,ι= 一�Fth +.: ftJt
dt In 乙 ." T',,, 山
一 一一一一一一一
(3.10)
ここで、んはスラスターダイナミクスの伝達関数への入力であり、Ft" は出力である。
Y軸方向の推力は次式のように表される。
Fyr = Fth (3.11)
3.1.3 実験方法
実験には前節に記述した1/100 模型を使用した(Fig.31)。
鎖を 用いた係留システムの状態図を Fig. 3.3、 3.4 に示す。 係留鎖の影響を議論す るためには、係留鎖に加わる流体力と構造物に加わる流体力の比を模型の場合と 実 機の場合でできるだけ等しくしなければならない。係留鎖に働く抗力の大きさは、
係留鎖の直径に比例するので 1/100 模型の場合、 鎖の直径を 1/100 にすればよい。
その場合、単位長さあたりの重量の比は1/10000 となる。 大型海洋構造物の係留鎖 としてよく用いられる76mm級chainの重量は115kg/m である。模型の スケールに 直すと、 単位長さあたりの重量は11. 5 g/m、 直径は1.3mm となる。 ここで、 通常行 われるように8点係留を考えると、模型 実験ではスペースの都合で 4点係留になる から、模型の係留鎖の一本は実機の係留鎖2本を代表することになるので、単位長 さあたりの重量は11. 5 g/m X 2=23.0g/m、直径は1.3mmX 2=2.6mm となる(Fig. 3.4)。
水平初期張力は左右揺の長周期動揺が20秒になるような等価線形バネ定数をカテ ナリ理論22)より求めた。 これは実機で約3.5分に相当する。
実験は九州大学応用力学研究所の深海機器実験水槽(長さ 60mX幅5mX深さ 7m)で・行った。模型の運動〈左右揺、上下揺、横揺)は摩擦などの影響を受けない 非接触式の光学式運動計測装置で計測し、 実時間で・ディスプレイ上に表示した。 波 は造波機により発生され、容量式波高計により計測される。 係留鎖の水平方向変動 張力は張力計により計測した。Fig.3.5に計測システムを 示す。運動計測装置からの アナログ出力はAD変換されパ、ノコンに入力される。
一一一一一
3.1.4 運動方程式の検証
運動方程式の精度を確認するために波浪中の応答試験を行い、数値シミュレーシ ョンによる結果と比較を行った。
まず、規則波中試験の結果を示す。
Fig.3.6に入/B=12の規則波中における、模型の運動の実験結果と計算結果の時系 列の比較を示す。 図は上からJI債 に入射波、左右揺、上下揺、横揺、波上側水平方向 変動張力、波下側水平方向変動張力を表している。また、実線が実験結果を、破線 が計算結果を表している。計算結果による横揺の振幅が、実験結果に比べて若干小
さいものの、実験と計算の振幅は良い精度で一致していることがわかる。
Fig. 3.7、3.8、3.9に左右揺、上下揺、横揺に関する周波数応答を示す。 0が実験 結果を、実線が数値シミュレーションによる結果を示している。数値シミュレーシ ョンは、実験で計測したそれぞれの周波数での規則波をもとに波力を生成し、この 波力データを用いて(3.3)、(3.4)、(3.5)の非線形運動方程式を使用して行った。左右 揺、上下揺の計算結果は実験結果と良い精度で一致している。Fig.3.9よりνBが11 以上で横揺の実験結果が、計算結果より大きくなっていることがわかる。これは波 の振幅が大きいために、係留鎖 の張力計測用のゲージ・スラスターへの信号伝達及 び電力供給用のケーブルが、運動に影響を及ぼしたものと考えられる。しかし、入/B が11以上の範囲は、不規則波実験で使用する波の周波数領域から外れているので、
実験結果に影響はないものと思われる。
Fig.3.10 、3.11に波上側と波下側の係留鎖変動張力の水平方向成分の実験結果と計 算結果を示す。 上下揺の固有周期(入/B=6.8)で計算結果が、若干大きくなるもの の、振幅、 位相ともに良く一致している。
次に、 不規則波中の応答試験の結果を示す。
Fig. 3.12は模型実験で使用した平均波周期1.0秒、有義波高0.04mの不規則波の JONSWAP型パワースペクトル、時系列である。実機ではそれぞれ10秒、4mに相
当する。
Fig. 3.13に鎖により係留した場合の運動の時系列と、そのパワースペクトルを示 す。 図は上からJI債に左右揺、横揺の(A)が実験結果、(B)がシミュレーション 結果を示している。なお、シミュレーションは(3.3)、(3の、(3勾式に示す非線形運 動方程式を使用して行った。左右揺に対して長周期動揺が顕著に現れていることが 確認することができる。また、不規則波中でも実験と計算は良く一致し、モデルの 精度が良いことが確認できた。
29
パワースペクトルの図 (Fig.3.13)の点線は、等価線形ノくネを用いて行った計算結 果である。 これより係留鎖の動的影響を考慮に入れなければ、左右揺の長周期動揺 が大きくなってしまうことがわかる。係留鎖の減衰力は長周期動揺の運動に大きく 寄与していることがわかる。 Fig.3.14に係留鎖の波下側水平方向変動張力の時系列 を示す。簡易計算法を用いた計算結果と実験結果が良く一致しているが、等価線形 バネ定数を用いて行った計算結果は、実験結果とは大きく異なった結果になってい る。係留鎖の動的影響を考慮にいれない場合の張力変動及び最大張力は、動的影響 を考慮、にいれたものよりも小さいことがわかる。係留システムの設計を考える場合、
係留鎖の動的影響を考慮、に入れることが重要であることがわかる。
3.1.5 制御系の検討
前節の波浪中試験の結果より、運動方程式の精度が確認できたので、数学モデル のより簡単な線形ノくネ係留について制御系の検討を行う。 制御方法の開発は、コン トローラの設計に要する時間が短い簡単なモデルについて、まず行うことが望まし いと考えられる。 また、線形バネを使用した係留システムの方が、 鎖で係留した場 合に比べて長周期動揺が大きしこれを抑止するようなコントローラを設計すれば 安全側の設計であるといえる。 コントローラの設計には、従来から良く使われてい る古典制御理論に基づく PID制御、全状態、オフ。ザーパを使用し、観測出力から波周 波数成分を除去することが可能な現代制御理論であるLQI制御、高度な周波数特性 の整形が可能な凡棚酷令を郎、た
3.1.5.1コントローラの設計
( 1) PIDコントローラの設計
概念図を Fig.3.15に示す。コントローラには係留点位置における、左右揺子、が 入力される。この入力に対して PIDコントローラがy軸方向の制御力fYTを算出する。
模型スラスターの時定数は非常に小さいため、アクチュエーターダイナミックスを 付加することにより、実機のスラスター特性を持つ模型実験が可能となる。 コント ローラが最終的に出力する制御力は2等分され各スラスター推力に置き換えられ、
さらに(3.9)式を用いて入力電圧が計算され、スラスター駆動用サーボパックに入力 される。PIDコントローラの比例・積分・微分ゲインは限界感度法23)を用い、Fig.3.15
に示すコントローラを(3.3)、(3.4)、(3.5)の非線形運動方程式につないで・数値シミュ レーションすることにより決定した。設計されたコントローラは状態空間表現に直 され、 離散化することによりディジタルPIDとして実装した。
(2) LQIコントローラの設計
(3.5)式を 、ジ,伊,V,pについて解き、スラスター特性(3.9)式とともに平衡点まわり で線形化すると、 浮体式海洋構造物の5次線形数学モデルが(3.12)式のように得ら れる。
(3.12)
(3.13) 九(Y,ムν,P,fyr)
f2σ,ø,v,p,ん)
= I f3(Y,仇ν,P,fyr) 人σ,ø,ν,P,fyr) fs(y'ムv,P,fyr)
u a B
+
x x aM A flJlL MνJ ・X-- 一一
C・4y
-V・P-
ん
(3.14)
。fi
a =一一一一
向 。X,
,
IX=X ,J4=ub_aり..
= -
θa fi U,1,
IX=X ,J4=u。的baijはマトリックスAa,Ba の要素、x\〆は平衡点における状態変数、入力の 値である。xは状態変数、uは操作入力、YMは観測出力であり、次式で表される。
(3.15) py
や ν
V Fy ~Y 一一 一一 一一
xuMνd r・--11111〈Ill11L
この線形システムは以下により可制御、 可観測である。
31
rank[Âl-
Aa Ba] =
5 (Vλ(A))rank[Âlー イ C�]=
5 (Vλ(A))制御目的は、非制御関数をY、定置目標入力をYcとすると
e=yc-y →o (t→∞)
(3.16) で表される。 ここで、{:ー-0.12Ø
yc =民=0
(3.17)
LQIコントロール、ンステムの概念図をFig.3.16に示す。 これは積分動作を含み次 式で表される加),25)
νJ 『lili--」 。 一 「ll1111」 + 寸111111J X
1パ | 」x × 1111lJ 「Ill1116し vha
vha rH 』 「ll1111」
・ B0×
「lilll111J
. OR
F
一
B
C
FC
dA 一
「111111FIll---L 一一 一一 「BElli--J -Illi--lJ
巧「川γ以」 X
「Illi--1l」
d一la
(3.18)このシステムに対して、次式で表される2次形式評価関数を最小にするゲイン行 列F、F[を求める。
J
= r (yT (ì物(t) +内)Ru(t))dt
(3.19)Q、Rは重み行列である。解は周知のように次式で与えられる。
ド
F[]=
R-1l
BToþ
(3.20)ここで、 Hは次式で示すようにRicωti方程式の解である。
、‘E/噌iゥ“ 司4d/E1 nu 一一 「lil--」
Q O nu nu
「Illi--L + H 寸,Ill1114
nu nU
TA B
→ O
R B rill--ーし H H 『alli---J 干ac o mt nU A 「lIll1111」 + 「lIll111J
nu nU A C
「IIlli--L 日
スラスターコントローラの目的は長周期動揺を抑止することにある。したがって、
スラスターの推力は波周期によって大きく変動しないことが望ましい。スラスター の推力程度では元来波周期の動揺を抑止することは不可能であり、振幅も小さいの で制御の必要がなく、波周期の動揺に対してスラスターが反応することは多大なエ ネルギーの損失であるといえる0・そこで、 フィルターを用い観測できる信号Yか
ら波周期成分を除去し、長周期動揺成分のみを取り出す必要がある。本研究では全 状態オブザーバーを使用し、観測できない状態変数だけでなく子の値にも推定値を 用いることにした。 これはYの値からカルマンフィルターを用いて波周期成分を
除去し、 長周期動揺成分のみを取り出すのと等価である26)。
実際のモデルはスラスターダイナミックスを含まないので、 Fig. 3.17に示すよう に設計された5次のコントローラにアクチュエーターダイナミックスをつなぎ、 7 次のコントローラを作り制御性能の検討を行う必要がある。これにより、実機のス ラスター特性を持つLQI制御による模型実験が可能となる。
(3) H∞コントローラの設計
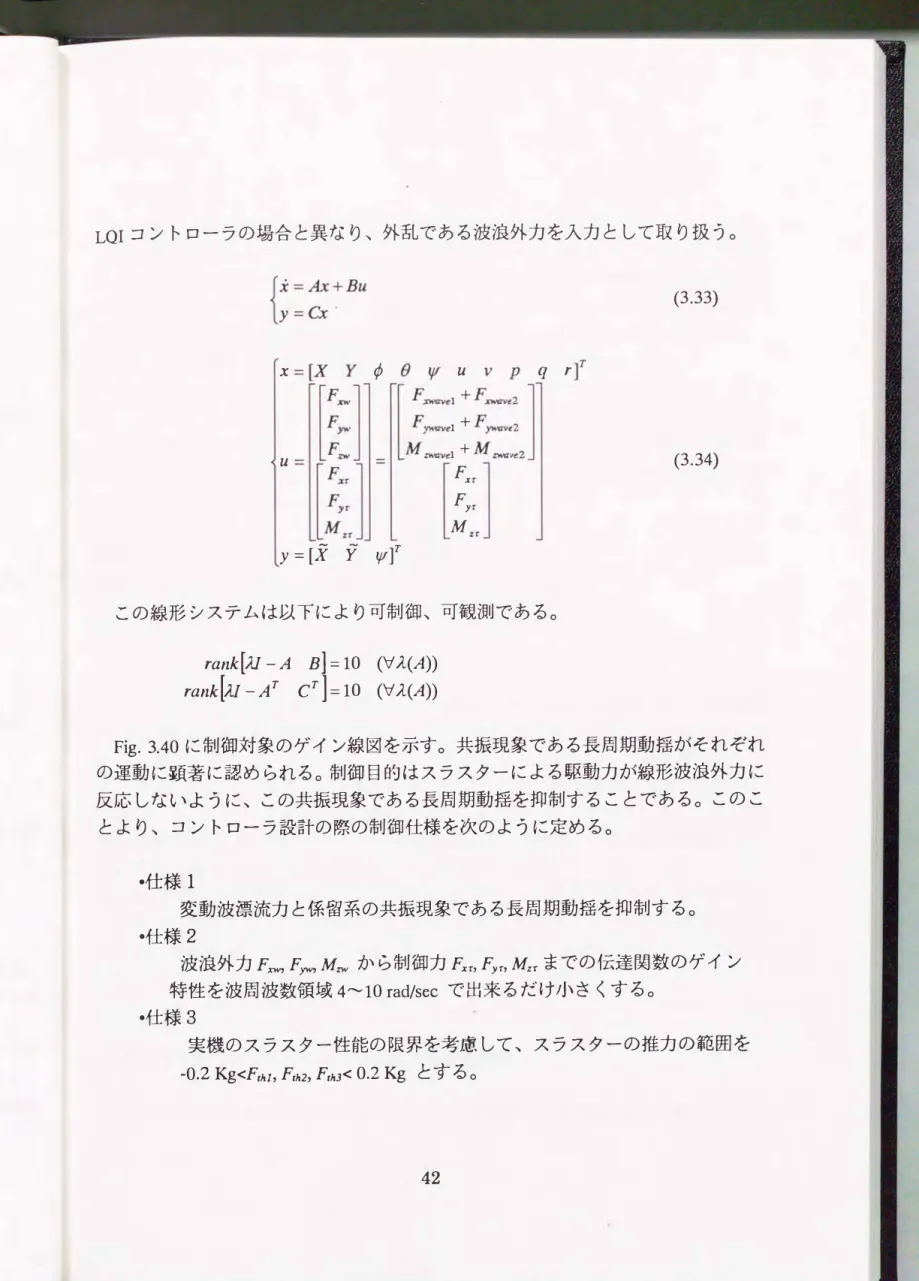
スラスターのダイナミックスを含まないモデル本来の4次線形数学モデルが非線 形運動方程式から(3.12)式と同様にして得られる。 ただし、 H∞コントローラの場合 はLQIコントローラの場合と異なり、外乱である波浪外力を入力として取り扱う。
(3.22)
u=
l :: J
=ト ? っ
= y = Y -0.12Ø
(3.23)
この線形システムは以下により可制御、 可観測である。
ra!lk[Âl -A B]=
4(Vλ(A)) rankい-AT CT]=
4(Vλ(A))
Fig. 3.18に制御対象のゲイン線図を示す。 共振現象である長周期動揺が顕著に認 められる。制御目的はスラスターによる駆動力が線形波浪外力に反応しないように、
この共振現象である長周期動揺を抑制することである。このことより、コントロー ラ設計の際の制御仕様を次のように定める。
-仕様1
変動波漂流力と係留系の共振現象である長周期動揺を抑制する0
・仕様2
波浪外力Fywから制御力Fyrまでの伝達関数のゲイン特性を波周波数領域
4""'" 1 0 rad/secで出来るだけ小さくする。
・仕様3
実機のスラスター性能の限界を考慮、して、 スラスターの推力の範囲を
・0.2 Kg<FrJ,< 0.2 Kg とする。
Fig.3.19にH∞コントロールシステムの相互結合系を示す幻),28)。コントローラιct は積分動作とアクチュエータダイナミックスを含む。 アクチュエータダイナミック スはスラスターダイナミックスを持たないモデルを、 実機と同じスラスターダイナ ミックスを持つかのように動作させるために必要なもので・ある。 実機と同じ動特性 を持つ模型スラスターを作ることが可能であればいらないものであるが、 そのよう な模型スラスターを作ることは困難であると思われる。
プラントの伝達関数Gは次式で計算できる。
G
= C
(sI 4-A)
-1B (
3.24)
またWzとW2は重み関数で、 トレードオフの関係にある、 波力 F からYまでyw の共振周波数付近における共振特性(長周期動揺〉を取り除くことと、 波力から制 御力Fyrまでのゲイン特性を波周波数領域で、十分小さくすることを、 共にできるだ け高い次元で満足させるように決定する。 本節ではFig.3.23に示すような重み関数 を選択した。
以上の準備のもとで、Fig.3.20に示す制約下、 できるだけ小さなァ>0に対して、
Fywから[Zl Z2Yまでの伝達関数のH∞ノルムを最小にするコントローラ K を求 める。
γ'
<∞
'A 't・
,ι・ ?ι・ pilli--L → w F T
( 3.25)コントローラの設計にはMatlabのLMI Control Toolbo�9)を使用した。 重み関数 眠、院はそれぞれ4、4次の関数なので、コントローラKは 12次となり、積分器、
アクチュエーターダイナミックスを付加した最終的なコントローラ ιctは 16次と なる。 設計されたコントローラιctは状態空間表現に直され、離散化することによ り実装した。 離散化のタイムステップは、使用する AD、DA変換機の性能やCPU の能力、コントローラの次数によって決まり、本実験の場合約0.007秒である。 最 初Fig.3.2 0に示す制約を付けずに解いたところ、閉ループ系とコントローラの極に 10の4乗のオーダーのものが現れた。このままではハイゲインのためノイズを増幅 してしまい、スタートアップができず、高速サンプリングが必要となる。 そこで、
設計に要する時間は長くなるが、前記制約を付け、0.007秒のサンプリング周期でス タートアップ可能とした。
3.1ふ2 コントローラによる周波数特性
設計されたそれぞれのコントローラによる周波数特性をFig. 3.21、 3.22、 3.23 に 示す。 それぞれ図の上側は制御対象の波浪外力から左右揺へのゲ、イン線図、下側は 波浪外力から制御力へのゲ、イン線図と波力のパワースペクトルである。 波力は実験 で計測した不規則波をもとに生成したものを使用した。 また、 閉ループは制御をか けない場合、 閉ループは制御をかけた場合の特性である。
PID コントロールの場合(Fig.3.21)、波力から運動までの共振周波数付近におけ る共振特性( 長周期動揺〉は取り除くことができるが、波力から制御力までのゲイ ン特性を波周波数領域(4<ω<10)で・十分小さくすることができない。 これは位相 補償のための微分動作により、高域で制御力が大きくなるためである。 従って、無 駄なエネルギーを使わない制御を行うには、フィルターにより低域の観測信号のみ を取り出して使う必要がある。 ローパスフィルターはこの場合、 カットオフ周波数 が非常に小さいので、位相遅れが大きくなり適当とはし、えず、 カルマンフィルター