理 学 療 法 学
第
36
巻
第ユ号
9
〜
17
頁
(2009
年
〕研 究 論 文
能
動 的
知覚
に
応
じ
て
出
力す
る
運
動
課 題 実 施 成 績
の
評価 指
標
に 関
す
る
研 究
*反
復
練 習 効 果
の
検
出
か ら
一
金
子
文 成
1
)2
)#速
水
達 也
3
>横 井
孝
志
D
木 塚
朝 博
3
)要 旨
【
目的 】 本研 究
では,
今 囘 考 案
し た運 動 感 覚
の能 動 的 知 覚
に応 じて運動
出力
す
る 運動 負荷 方
法
で あ る運 動
平衡 保 持 (
K
−
E
) 法
に よ る練 習 介 入
を行
い,
我
々 が設 定 す
る変 数 が,
練 習 介
入の結 果 と して生 じ る機 能 的
変化 を 検 出
でき
る かど う
かを 明
ら か にす
る。ま
た,
従 来
か らの運 動 感 覚 機 能 評 仙 法
であ る再 現 法
に よ る検
査 成 績 と
K ・
E
法
に よ る検 査 成 績
との関 係 か ら
,
K
−E
法
の検 査 成 績
が,
再 現 法
に よっ て評 価
さ れ る機 能
と関
連 し てい るの かどう
かを
明 らか にする。
【
方 法
1
健 康
な成 人男 性
に対
し て,
K
−
E
法
に よ る練 習
を2
凵問 反復
さ せ, その前 後
にK −E
法
お よび
再現 法
に よ る検 査 を 実 施 した
。
運 動 は膝 関 節 伸 展 方 向
とし
た。【
結 果
】
K
−
E
法
で は,
練
習後
の検 査 成 績
が有 意
に向
上 し て おり
,
設 定
した 変 数
が運 動 感 覚
お よ び運 動 出力
の機 能 的
変 化 を 検 出 してい るこ と が 示 唆 さ れ た。
ま た,
K −
E
法の 検査
成 績 と再 現法
の検 査 成 績
と の間に は,
相 関
を認
め る変 数
の組
み合
わ せ が複
数
あっ た。
【
結 論
】
以 上の こ とか ら,我
々が設 定
し た変 数
は,K−E
課 題
の成
績
を示 す 指 標
と して妥
当で あ る もの と考 え た。
ま た,
K
−
E
法の成績
は 再 現法
の成 績
が 反映 す
る機 能
と独 立
で は なく
,
そ れ らの機 能
と係
わ り が あ る 可能
性 が 示 唆 さ れ た/
)
キ
ー
ワー
ド運 動 感 覚
,
体 性 感 覚
,
能 動 的 知 覚
(
ハ プテ ィクス) は じ め にtt
運動
感 覚
(
kinesthesia
)
”
という
用 讙1
はBastian
(
1888
)
が採
川 し た言 葉
で,皮 膚
,筋
や その他
の深部 器
官
(
腱
,
関 節 な
ど)
から も
たら
さ れ る“
印 象 (
impres−
sions
)
”
を 示 すも
の であ
っ た。
現在
で は, 運動 感
覚 およ び 固有 感 覚
⊂
proprioception
)
は,複 数
の感 覚
を包 含
す る意 味
で使 用
さ れ る。
そ
れ は,
関
節 位 置
お よ び 四肢 ま
たは体 幹
の動 き などの感 覚 (
kinesthetic
sense
;位 置
覚
,
*
Research
on
Examimation
hldic
ヨtor 〔,「Motor
Perfo
−’
nancc
Correspondi11g
Lo theActive
Kiiicsthetic
Perception
:from
Ule
Viewpoint
〔,f
Delec
亡ion
〔}f
Rcpetitivc
Pracrice
Effcct
1
) 独ウ行政法人 産業 技 術 総 合 研 究 所 入間福 祉 医工学 研 究 部 円
FLlmlnarL
Kanckc
,、
RPT
.
PhD
,
Takashi
Yokoi,
PhD :lnsLi匚11te 丘}
r
Huma
[1Scien
〔:e andBiomedical
Engimeering
、
Nationa
⊥lnstitute ofAdvanced
Industrial
S
じienca
andTechnoLog
,
y2
〕 北 海道 公 立 大 学 法人 札幌医科大 学 保健 医療学 部 理 学 療 法 学科 〔〒0608556
札 幌 巾 南1
条 西17
丁日>Fumi ロari
Kaneko
,
RPT
,
Pl
ユD
:Departmcnt
〔}f
Physical
Tllcrapy
,
School
of Health Sじi〔mces,
Sapporo
:ledTea
!Universi
’
Ly3
>筑 波 大 学 大学 院 人間 総 合 科 学 研 究科
Ta
’
tsuyaIlaya
皿i
、
MS
,
’
roTnohiro Kizukn,
PhD :IlcaLth a匚ユd
Sport
ScicrLces
、
Graduate
S
〔/hool
efC
(,mprehensL 丶・
e Hunlan Sciel1じes、
U
冂iversity
ofTsukuba
#
E
−
mail/f
.
ka
ロcko @sapmed.
ac.
jp
,
〔受 付日2007
年8
月20
日 /・
受理 日2008
年ll
月14日〕運 動 覚 )
,
努 力 感
,
筋
の張 力
,
重 量 そ
して ステ ィ フネ
スな
ど筋
の力
に関 連 し
た感 覚 (
sense ofeffort
も し く
はscnse
of
・heaviness
;力 覚)
,筋 収 縮
の タイミ ング に 関す
る感 覚
,
姿 勢
お よ び身体
図式
の大 き
さの感 覚
, の4
つであ
る1〕。
“
運 動 感 覚 信 号 (
kinesthetic
signa1)
”
と
いう
用 語 には, 末 梢の筋
, 腱, 関節
周 囲, 皮膚
などに 数多
く存 在
す る受 容
器 か らの入力
だ け で な く,同様
に巾枢
か らの 運動 指 令
入力 [
efference copy(
遠
心性
コ ピ→
,
corollarydischarge
(
随 伴 放 電 )
]
2)3 〕も含 ま
れ る。運 動
感
覚
が運 動 出 力
に果
たす 役 割
に関 す
る諸 家
の報 告
で は,
感 覚
を 遮断 す
る方 法
が多 く用
い られ,
感 覚 遮 断
の影 響
とし
て以 下の よう
にま
とめら
れ る4−
9,。串純 な筋 出 力
や関節 運 動 は可 能
であ
る.
複 数 関 節 問
の非 協 調
が起
こる。運
動 方 向
,
手
の予期 成 形
(
preshaping
)
などの正 確性
が低 下 す
る。歩 行
は可 能
であ
るが,
不規 則
で非 協 調
と な る。
運
動
中の環 境
へ の適
応 が障 害
さ れる 。 これ ら の こ と か ら,
運 動 感 覚 が 運動
パ フォー
マ ンス(
運動
の正 確 さ,求
め ら れ る 技能
の高
さ,
運動
成績
,
な
ど を含
む)
に影響 す
る こと は明
ら か で あ る。
し た がっ て, 運動
機 能 の向
上 を目的
と し た理 学 療 法
に おいて,
ど
の よう
に運 動
感 覚
と 運動
出力
と を統 合
し た機 能 (
体 性 感 覚
一
運 動 連 関)
10
理学 療 法 学 第36
巻 第⊥号 を向
上 させ るかは重 要 な 課 題であ る。
体 性 感 覚 と 運 動 が連 関 す
る機 能
に対 す
る介 入
の方 法
と し て は, い くつ かの方 法
が提 案
さ れて い る 10−
12)。 し か し,
いず
れの方 法
を 用いた と して も,
その実施
成 績 を 定 量 的 に 示 すこ と は 難 しい。 そこで我
々は,被 験 者
に 運動
感
覚
信 号
を 能動 的
に知 覚
さ せ,
その情 報
に基
づ いて運動
さ せ る た めの運動
負
荷
方 法
と し て,
“
運 動 平 衡 保 持 (Kinetic
−
Equi
]ibrating
:K
−E
)
法
”
を考 案
し た。
K
−
E
法
は,
能 動 的 な 触 覚
Cactive
touch
)
に より手
で触
れた物 休
の形 状
を知 覚 す
る の に類 似
して,
能 動 的
に運 動 感 覚
を知 覚
し,
そ
の情 報
に基づ い て運 動
IA
力 す
る方 法
であ り
,
その知 覚 過 程
はhaptic
sensing1 コ〕14〕に含 ま
れる と考 え
る。
本 研 究
で は,
K
−
E
法
に よ る運 動 課
題(
K
−
E
課
題)
を 用 いた 練 習 介
入を 行
い,
その前 後
でK −E
課 題の成 績
が向
上す
ること を 大前
提 と す る。
そ し て,K−E
法
で 採 用 し よう
とする変数
を 評価 指 標
と して, 成 績の向
ヒを検
出 で き た か否
かを
調べ る こ と で,
そ れ らの変
数 が検
査
の成績
を 示 す 指 標 と して妥 当であっ た か どう
か を 決 定 する。
ま た,
従 来
か ら運 動 感 覚
お よ び 運動 出力 機 能
の検
査 と して行
わ れてき
た再 現 法
に よ る課 題
の成 績
とK
−
E
課 題
の成 績
と の関
連 か ら,
K
−
E
課 題
の成績
が再 現 課 題
で検
査 し て いる運 動 感 覚 機 能 お よ
び運 動 出力 機 能
と係 わ りが あ
るか
どう
かを 明
らか
にす
る。
方
法
1
.
対象
対 象
は健 康 な 成 人 男 性
23 名
で(
年 齢
222
±3
,
6
歳,
身
長
170
,
5
±5
.
8
cm,
体
重64
.
1
±6
.
8
kg
)
,
自
己申 告
に よ り 運動
お よび感 覚 機 能
に問
題 を 生 じる よう
な現
症 お よ び 既往 症
のな
いも
の とし
た。ま
た,
測 定 側
は ボー
ル を蹴
る機
能 足
の反 対 側
と し た。本 研 究
は,
事 前
に筆 者
ら が所 属 す
る研 究 所 倫 理 委 員 会
に おいて承 認
さ れており
(
承 認 番
7v
36
−
06
−
20
),
被 験 者 は 十 分 な 説 明 を 受 け た 後 に 同 意 書 に 署名
し た。
2
.
実験 手
順木 研 究で は
,
初 口の 検 企 後 に2
円 問K
−
E
課 題 を 反 復 し て練 習 介
入 し, その後
に検
査 と して のK −E
課
題 お よ び 従 来 か ら おこな わ れて き た 運動 感 覚 検
査 を 実 施 し た(
表
1
)
。
練 習 介
入で実
施 し たK
−
E
課
題 は,
後
に説 明 す
る検
査で実 施
した方法
と同 様
であ
っ た。各 検
査 は 全て閉 眼
で実 施
し たが,
最 初
の練 習 介
人は,
は じめ に開 眼で行
っ た。
1
)
K
−
E
課 題
我
々 は,
これ まで にK
−E
課
題を 実 施 す
る た め に感 覚
運動 機 能 検 査 練
習装 置
〔名 称
:キ ネス テー
ジKineStage
)
を 開 発 して きてお り,本
研究
で は これ を使
用 した。
キ ネ ス テー
ジ は2
台のモー
タ に接
続 す る リン ク機 構
の 先端
に あ る 接 触 部 を 手で把 持 も し く は 足 部 を 固 定 す る な ど して使
用す
る もの であ る(
図1A
)
。
エ ン コー
ダ に よ るモー
タ 囘転 角
度の計
測結 果
か ら,
接
触
部
の位 置 座 標
が計算
さ れ る。
その座標 計
測精
度 は一
回の運動
で1mm
以 内である (株 式 会社
三菱
プレ シジョ ン,
出 荷 時 検 査
に よ る)
。ま
た,
リン ク機 構
と接 触 部
との問
に設 置
さ れ た小
型6
軸 力 覚
セ ン サ(
ピー ・
エ ル・
オー
トテ ッ ク株 式 会
社 製,
Micro
5
/50
)
に より
,
接 触 部
とリ
ン ク機 構 問
に発
生す
る力 を計
測 す
る ことが
でき
るも
の であ
る. これ らの計 測
パ ラ メー
タから,今
回は位 置 座 標
の みを評 価 指 標
と し て使 用
し た。座 標
の変 化
は キネ
ステー
ジ
の出力 指 令 値
と共
に,
周 波 数
1
,
000
Hz
で制 御
川コ ン ピュー
タに記 録
した
。
被
験者
は 大 腿骨
内
側 上顆
と外
側 上顆
を結
ぶ線 を水
’
F
前
に 投影
し た線
が キ ネステー
ジのX
座
標(
図IB
) と 並 行
になる位 置で端 坐 位姿 勢
と し た。
課 題 を 開始 す
る時
の膝
関 節
は屈 曲
60c
と し,
可及
的 に安 静
を保
て る姿 勢
とな る よう
に 大 腿の位置
な ど に 配慮
し た。
足 部を裸
足と
し て キ ネス テー
ジの接 触 部
に固定
し た。
装 置
か らの冂標 力呈 示
表1K
−
E
法による練 習 介 入 実 施の スケ ジュー
ル練 習 介 人は
,
5
回を⊥つ の単 位と して6
申.
位反復し た,
その他 に,
検 杏前のウォー
ミング アップ とし てもK
・
E
課 題 を実 施 した.
Table
l
Thc
schcdulc o [Lhe
practice
interventien
.
Af
しerthe
[irst
exarnination (about
of5times
),
匚otal6
beuts
and8
廿mes warm−
up しrials wore executedbefore
the2nd
examination
.
(
⊂):openedeyes
,
●: じ
losed
eyes )
「
.
.
.
一
一一
K
−
Etask
exerClsereproductlon reproduetion
warm
−
up {/xnlninaLiDn.
exerclse一
一
論
day
● ● ● ●day
能 動 的 知 覚に応じて出力 する 運
動
課題 実 施成 績の評価 指 標に関 する 峅究11
y
L
細
、滑
$y
$tem
(A
} *:飆 ¥籀霤蜘 隗 醸erfaee
《飴
o
乏一
r饑t
} {B
) 図1
キネステー
ジの概 略 図被験 者は
,
自らが感 じた目標 晃示 力の強さに応じて運 動 出 力 する ように指示 さ れ た.
Fig
◆
1
Schcrnatic
representation ofthe
KineStage
Subjects
wereinstrucLed
to
produce
muscular output (→ )based
on thcirperception
ofthe
target
force
(O,
は
水 平 面
ヒで多 方 向
から
可能
であ
るが,
本研 究
で は前 方
から後 方 す
なわち 被 験 者
の膝 閼節
を伸 展 運 動
に抗 す
る方
向 (
キネ
ス テー
ジ座 標
で はY
軸
の マイ
ナ ス方 向 〉
に対
し て加 え
たn 被 験者
に対
して は,
装 置
から旱 示 され た目標 力
と ちょう
ど釣
り合いが とれる よう
に筋 出力 す
る と共
に,
関節
が 動 か ない よう
に心
が け る よう指 示
し た。
ま
た,
大 き く足 部 位 置 が 変 位 し た 場 合で も,
その場 か ら 元の位置
へ戻 す
の で は なく
,
変位
し た場
所
で引
き続
き関 節
が動
か ない よ う に 筋 出 力 す る よう
に指 導
し た。
K −E
課 題 は 閉 眼で行い,
その際 に被 験 者 は 耳 栓 を 装 着 し た。
図
2A
に 点線
で示 す
正弦 波
様
の曲 線
は 目 標呈 示 力
の時
系
列 的 変 化 を 示 す。
そ れ に 抗 し て 被験 者
が筋 出 力
し た値
の経 時 的 変 化 を 実 線 で示 し た。
目 標 呈 示 力 と 完 全 に 被 験者
の筋
出 力 が平
衡 状 態 に あ れ ば,点 線
と 実 線 は完
全 に一
致 す
る。
図
2B
は,
位 置
座標
の経 時
的 変化
を表 す
。
開 始
位 置
か ら全くず
れ を 生 じ ない場 合
には,
位 置
座標
が変 化
し ない た め直 線
とな
る。
同 時
に,
図
2C
の微 分 値
は0
のま
ま という
こと にな
る。目標 力
は,
3
種 類
の周 期 (
ユ2
秒
,
15
秒
,
18
秒 )
を 無作 為
に組
み合 わ せ た。
周期
と は,
目標
呈示 力
が オフセ ット
か ら 上昇
して再 度 オ
フ セッ トに戻
る まで の時 間
をいう
。 オフセット
は10N
,
最 大 目標 力
は40N
と し た。
・
圓 の試技
には4
鬮 期
が含
まれ,
2
番 目
以降
の周 期
に おけ
る状 態
を分 析 対 象 区 間
と し た。そ
の中
で,
周 期
18
秒
を分 析 対 象
と し た。
これ ら,
目標
呈示 力
の増減 波
形 および周 期
は,
これ まで の予備 的研 究 結 果
か ら適 切
と考 え
る方 法 を用
い た15)161] ,、また
,
測 定 は
2
試
技
の ウt
一
ミ ングア ッ プの後
に,
評 価
のた めの試 技
とし
て5
試 技 行っ た 〔表
ユ)
。
2
)K
−
E
課 題に よ る検
査 成 績の 指 標目標 呈 示 力
の周 期
は無 作 為
に変 化
さ せ ていた た め,
予 測に基づ いた筋 出力
は行
い にく
い。
し たがっ て,
被
験 者 の 筋 出 力 は,
目 標 呈 示 力に対
して時 間
遅れ を もっ て追従
す
ること に な る と 予 想 し た。
この場 合
,
座標
は周 期 性 を
も
っ てY
軸 方 向
に変
位 す るこ とに なる。
座標
の変 位
に {A
}
{8
}5G
40
竃
3
登婁
2
馨 蕊10
0
ハ
撞 薮)
篇 o 導 の 星 旬5
拿一
5
ら2
1
0
」2
3
α 甑o
o
舮
席
3
麟瞭
霍 励達
ε)
儲 聯 鳶 》冖
傷 蒋 螺 簓」
農
一
瓢 瓢 ◎ 葱 的 O α {c
) ()fe
2C
30
40
5
{}6G
t
}rv}e(sec ) otfset 図2
キ ネステー
ジか ら呈 示 さ れ た 目標 力 と,
そ れに応 じて被 験 著 が 出 力 した 随 意 筋 出 力の曲 線 (A
)/位 置 変 化 を 示 す 曲線 (B
)/位 置llll
線の微 分 値 〔C
)Fig
.
2
A
‘orce curve (一
)of vo !unLary oLltl〕ut andpre
−
sented larget
for
〔:e 〔一
一
・
一
・
一
)from
theKineStage
(AV
Acurve
ofIhe
position
displaccment
{B
戸The
dif
−
feren
’
tial
value ol 吐he
positiorl
(C
)関
す
る 目標 値
は0
であ り,
その 目標
か らの誤 差 租度
や誤
差
のば
らつきを表 現 す
ること
で機 能状 態
を表 す
指
標
とす
る よう
に考 え
た。
接 触 部
の座 標 変 化 を知
る た め に,
ま ず 座標
の経 時 的 変 化
を微 分
し た(
図2C
)
。
その後
,微
分 値 を加 算
し,
単位 時 間 当 り
の位 置 変 化
を算 畠
し た(
式
1
)
。P
・・K
・AE
一
篭
「
馴
…
・ …
各 試技
の単 位 時 間 (
1
秒
間) 当 り
の位 置
変化 絶
対値
をK −
12
理 学療 法学 第36
巻 第 ユ号ing
K
−
E
:PosKeAE
)
という
。
K
−
E
位 置 絶 対 誤 差の計 算 で算 出 し
た位 置変 化 微 分 値
の標 準 偏 差 を
求
め,K−E
位 置
山 線 動 揺 (
fiuctuation
of
positbn
curve
during
K
−
E
:PosKeFL
)
とし た。
K
−
E
位 置
絶 対 誤 差 とK
−
E
位 置 山 線動 揺 は
5
試 技 分
の平 均 値 を個
人 の代
表値
と し た。
ま た,
K
−
E
位 置 絶 対 談 差
の5
試 技
につ い て の標準
偏 差 を算
出し
,
本 研 究
で は こ れ をK −E
位 世 変 動 誤 差(
variableerror
of
p
〔〕sition curveduring
K −
E
:PosKeVE
)
と
呼
ぶ。
3.
既存
の検
査 法1
) 再 現 課 題従 来
か ら行
わ れて き た 運動 感
覚
機 能
お よ び運 動 機 能 評
価 法 と して,
力 お よ び 位 置 再 現 課 題 を実 施
し た。
被 験 者
はee1
〈性 筋 力 測 定 装 置 (
OG
技 研 杜 製
,
MusculatorGT
−
30 )
に端
坐位
と なり
,
足 底
は接 地
しな
い高
さで あっ た。
力 再 現 課 題で は,
等
尺性 膝 関 節 伸 展 力
を小
型ロー
ドセ ル(
共 和 電 業 社 製
,
LUR
−
A
−
IKNSA1
)
で計 測
し た。
再
現す
る膝 関節 伸 展 力
は膝
関節
1
出曲
60
°
の 状態
で40N
と し た。
等
尺性 筋 力
お よ び関節 角 度
は被
験 者の止 面 に置
いた オ シ ロ ス コー
プ
に表 示
さ れ ると
同時
に,A
/D
変換
用PC
カー
ド
(
National
Instruments
社 製,
DAQCard
−
6024E
) か らパ
ー
ソナル コ ンピュー
タに取
り込
んだ(
サンプ リング周
波 数
1
,
000
Hz
)
。な
お,
ロー
ドセ ルか らの信
冨・
は,
PC
カー
ドへ 信 号 入 力 す る前
に10Hz
の 高 周 波 遮 断アナロ グフ ィ ル ター
(
共
和
電業
社
製,LF −
303A )
を通 過
させ た。位
置 再 現 課 題 に おい て は,
予
め被
験者
に膝 関 節 角 度
を計
測す
る た めの電気 角 度 計 (
日本 光 電 社 製
,
ECH6061
)
を装 着
し た、
, さ らに,
K
−
E
課 題
との整 合 性 を 図 り
,
40
N
の重り
を装 置
の後 方
に ワイ ヤの・
端
とつな げ
て2
つ の滑
車
を利 川
して吊
る し,
他 方
をベ ル ト に取 り付 け
,
被 験 者
のド腿 遠 位 端
に装 着 し
た。再 現 す
る膝 関 節 角 度
は屈 山
60
°
とし
た。
滑 車
の位 置 を 調 節 す
るこ と に より
,
膝 関節
屈 曲
60
甲
で重り
を連 結
したワ イ ヤ が下腿 長 軸
に対
し て垂直 と な
る よう
に し た。電 気 角 度 計
の デー
タも
ロー
ドセ ル の デー
タと共
にAID
変換
した
。
再 現 課 題は,
先 行
研究
17−
2ω に準
じて以 下の よう
に行
っ た。
各
試技
は検 者
の口頭 合 図
に より
開始
し,開
始 肢
位
の ド垂 位
か ら 運動 を
開始
し,
オシロ ス コー
プ に標 的
と して表 示 さ れた膝 関 節 伸 展 力 (再 現 力40N
) も し くは関 節 角 度 (
再 現 角 度
60
う
とな
るま
で仲 展 力 を増 加 す
る,
も
しく
は関 節 角 度
へ移 動 す
る,
日
標
と し た状 態
になっ た時 点
で閉
眼 し,
後
で再現 す
るた めに5
秒
間 その状 態 を知 覚 す
る(
図3A
)
,
一
端 脱 力す
る(
5
秒 間〉
,
閉 眼 で
,
先 に 知 覚 し た 伸 展 力 も し く は 関節
角度
を 再 現 す る,
目標 伸 展 力 も し く は 関 節 角 度 に 達 した と被 験 者 が
自覚
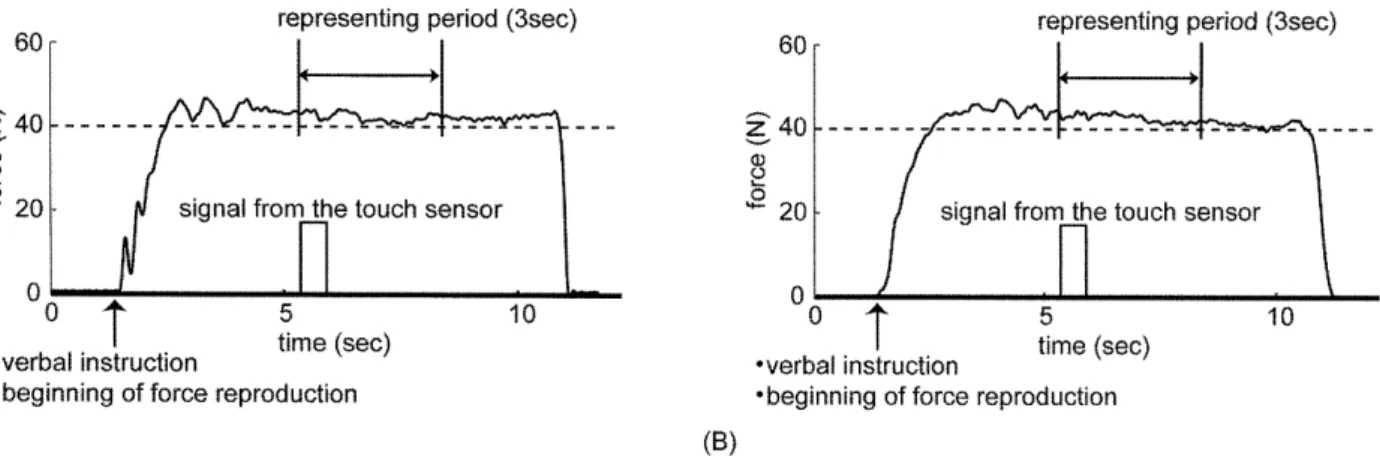
的 に 判 断 した時 点で, タ ッ チ セ ン サに触
れ て合 図 する(
図
3B
)
,
さ ら に
,
伸 展 力 も
しく
は関 節 角 度
につ い て その状 態
を5
秒
闡維 持 す
る,
検 者
の 口頭
に よ る合 図
で6e
24e
薈
葦20 (A
}o
誌
∫
跏 、t
、。n藁
鶴 ・60
10
一
>oluntary outpu ま argetforce
rePieseRtlng
paFlgd
{3sec
}憂 40
薈
惹
2G
〔B )%
↑
漏
働・
verballn$
truction
°
beginlng
oξforce
re 浮roduct [on10 図
3
力再 現 課 題 中に記録さ れたデー
タ被 験 者 は 開 眼で 目標 力レベ ルに筋 出 力 を合 わせ
,
口標力
レベ ルに合っ た ら 閉 眼 す る.
5
秒 間 その 筋 出 力 レベル を 維 持 し,
記 憶 する (A
).
力 再現課題 は検 者のll
頭指示 で 開 始 し.
被 験 者 がH
標 力レ ベ ルに合わせた と判 断 し た時点 で,
タッチセ ン サ に て その こと を知 らせ る (B
).
Fig
.
3
An
cxamplc of aforce
curve recordingduring
force
reproduction rask
This
figure
i1
]ustrateshow
target
force
level
was memo.
rized (
A
}.
Subjects
produced
the
targetforce
with eyesopen ¢
d
;1hcn
,
with cyes cLosed,
they attemptedtQ
memorizethe
force
level
.
The
memorizedforce
level
was reproducedaftcr cxperitncn1
.
er,
s verba ]instructioTl
{B
),
When
subjectsjudged
that
lheforcc
lev
¢l
was rcproduced u 匚the
merno−
rizedtargct
force
,
they
slgnaLed withthe
teuch
sensor,
終 了 す
る,
という順
で行
っ た。
測 定
は両課 題
とも
5
試技
ず
つ と した。2
) 再 現 課 題 成 績
の評 価
力 お
よ び関 節 位 置 冉現 課 題
とも
に,
被 験 者
はタッチ
セ ン サ に よ る合
図 をし て か ら5
秒
間 その状 態
を維 持 す
る が,
その巾
で3
秒
間を 評価 区
間と
し た(
図
3B
)
。標 的
とな
る膝 関 節 仲 展 力 お
よび関 節 角 度
と再 現 し
た膝 関 節 伸 展
力
およ び関節 角 度
との差 分
を絶
対値
化し,
評価 区
間の平
均 値 を算 出
した。
そ し て,
5
試 技 分
の平 均 値 を算 出 し
たも
のを 再 現 力 も
しく
は再 現 位 置 絶 対 誤 差
(
absolute error offorce
curvc
during
reproduction ;
FrcReAE
,
abs
〔}1ute
errorof
positioll
curve
dur1ng
reproduction :PosReAE
>
と し た。
ま た,
5
試 技の冉 現 性の ば らつ き と して,
評 価 区 間3
秒 閲 に お け るL’
J
標値
と再 現値
との差 分
を 平 均 値 化 し
,
5
試技
分の標 準 偏
差 を算
出し た ものを 再 現力 も
しく
は再 現 位 置変 動 誤 差
(
variable error offorce
curve
during
reproduction :FrcReVE
,
variable errQrof
position
curve
during
rcproduction :PosReVE
)と
し
た。さ
らに,
発 揮
し た膝 関 節伸 展 力
お よ び関 節 角
度の能 動 的 知 覚に応じて出 力 する運 動 課 題 実 施 成 績の評価 指 標に 関する研 究
13
の標 準 偏
差 を算
出 し,
5
試技
の平 均 値
を個
人の代 表 値
とし た、
、
これ を冉 現 力
も しく
は冉
現位
置 曲線 動 揺
(f
!uctu−
ation
of
force
curve
during
reprod しlction :FrcReFL
,
fluctuation
of
p
⊂)sitjoncurve
during
reproduction :
P
(,sReFL)
と し た。
4
.
統計 学
的 分析
K
−
E
課
題の練 習
に よ る影 響
を分 析 す
る た め に,
各 計 測
項
目に関
して,
練 習 前 後
の成績
を対
応のあ
るt
検 定
で比 較 し た。
ま た,
K
−
E
課
題 に よ る練 習 介
入 以前
の関 係
を調
べ る た めに,
練 習 前
に実 施
し たK
−
E
課 題
による検 査 成
績
,
お よび.
各再 現 法
の成 績
の関係
につ い て,
ピアソ ン の相 関 係 数 (
r) を 求
め,
直 線
回帰 関 数
の検 定 を行 な
っ た.
t
検 定
,
お よ び 回帰 関 数
の検 定
いず
れも
,
有 意 水 準 を
5
% と し た、
、
結
果
LK −E
課 題 に よ る 練 習の影 響
1
)
K
−
E
法に よ る検
査成 績
K −E
課 題を実 施
し てい る 最 中の生
デー
タ を 図4
に 示 し た。
上の グ ラフ (力のデー
タ 〉 か ら,
練 習介
人 削 (図4
−
A
)
と 比較
し て介
人後
(
図4
−
B
)
に は,
点 線
で示 す 目標
呈
示力
と実 線
で示 す
実
際
の 出力
との誤
差 が,
視
覚
的
に少
な く なっ たこと が確
認で きるu 同 時に,
下のグラ フが表
す 座標
の変動
が介 入 後
に減 少
して い る こ と が確 認 さ
れ る。K−
E
課 題 に よ る検
査 成績
は,
3
つ の変 数
全て に おい て 練 習 前 後で 統計 学
的有
意 差 が あ っ た(
PosKeAE
;t
=
3
.
99
,
p
〈0
.
OOI
,
PosKeVE
;t
=
3
,
9
,
O,
p
<0.
Ol,
PosKeFL
;t
=
3
.
48
,
p
<0
,
001
) (
図
5
)
。
K
−
E
課 題
に よ る検
査で指 標
と し た変
数 全て につ い て,
成 績
が向
上 し て い たv2 )再 現 法
に よる検
査成 績
再 現 法
の検
査 成績
につ いて,
力 再 現 法 実 施 中
の生デー
タ を示 す
(図
6
)
。力 再 現 法
に つ い て,
FrcReAE
とFrcReFL
で は練 習 前 後
の変 化
が統 計 学 的
に有 意
でなか っ た(
FrcReAE
;t
=
1
,
44
,
FrcReFL
;t
=
0
,
87
) (
図
7
,
図
8
)
。 し かし
,
FrcReVE
は練 習 後
に統 計 学
r
「勺有 意
に低
値
を示
し,
成 績
が11
」珪
し て い た(
t
=
3
.
09
,
p
〈0
.
Ol
)
(
mm
>
3
.
0
2
.
0
1
.
0
0
(mm )1
.
5
1
,
0
0,
5
0
(
mm
)0
.
015
tキロ
ー0.
005
0
★
虎
忠
口
before
afterbefore
afterbefore
after〔
A
)(
B
>
(
C
)図
5K
−
E
課 題 練 習 前 後に おけるキ ネス テー
ジ に よ る 検 査 成 績の変 化
PQsKeAE
(A
>,
PosKeVE
(B
),
PosKeFL
(C
).
すべ て の変 数で
,
練 習 後に統 計 学 的 有 意な成 績の向上 が 示 された.
Fig
.
5
Meall
±SD
of absolute error 〔PosKeAE
)(A
),
variab }o orrur 〔PosKeVE
)(B
),
aIld standarddeviat
.
ion
〔PosKeFL
)(C
)calculatedrrom
the
position
data
(luring
K
−
E
taskby
means of
KineStage
口
indi
⊂atesthe
resu ⊥しbefore
repetitiveK
−
E
exer−
cisos,
arld ■indicates
that
after exercises.
The
results suggestcdthat
allparamct
/ersimproved
aftertbe
repc し
itive
K
−
E
exe1℃ise
.
* *:p
<0
.
0
工,
* * *:
p
〈0
,
001
.
50
4e
§
30
暴
・・100
offset
50
40
霧
3
。鬘
・。lG0
o 仟Set
(A
) む ハ レ むむ 蒙 擁 塗
書
薮)
痿
輝
…
の象
0
30
20
30
40
5G
6G
亀融 e (seG >O
(
》O
閉 滑ハ
∈5
鬘
蒻
鼠
一
2
(}.
G
GO
(B
)20
30
4
〔}50
6
◎time
(sec>
図4
K
−
E
課 題 実 施 中にある.
・
例 か ら 記録さ れ たカお よ び位 置 変 化の生デー
ダA
は練 習 介 入 前,
B
は 練 習 介 入 後に行わ れ た検 査 巾に記録さ れ た.
点 線は,
キ ネステー
ジか ら呈 示さ れ た力
で あ り.
実 線は 実際 に被験者が出 力し た力 (.
1
’
.
グ ラフ),
あるい は位 置変 化 (ド グラ フ) を示 す,
Fig
.
4
Specimen
records offorce
andposition
change recordedfrom
a subjectdurillg
K
.
E
taskbefore
{A
)and after{
B
)K
−
Erepetitive
oxercise.
1
)ottedline
indicazes
presen
しcdtarget
fol
・
ceby
thc
KineSrage
and solidli
エleindicates
14
理学 療 法 学 第36
巻 第1
号60
奮40
冨
9
20
〈
A
)
「
e
匡)「esenting
Period
(
3sec
>
o
_
晶
纛
、1
。n
磊
蜘
・
6beg 麟
n
醜g
offorce
reprod じctionIo
60
240
冨
§
+29
repre $enting 欝er め
d
(
3sec
>
$
ignal
from
the
touch
sen
$Of
(
B
)
o
論
。晶
壽
蜘
・
.
beginni
自90f
ferce
reproductionIc
図
6
K
−
E
による 反復 練習前 後に,
あ る一
例 か ら記録さ れ た再 規 課 題 中のカデー
タA
は練習介人前のもので あ り,
B
は 練 習 介 人 後の デー
タである.
Fig
.
6
(
A
)andafter
{B
)K
−
E
repetitive exerciseDQtted
[ine
indicates
target
f
〔}rce and solidline
indlcates
voluntarilyproduced
force
.
Specimen
recerds of voluntary outputforce
during
the
force
reproductiontask
rccordedfrom
a subjectbefore
岡
渇(
−1
.
0
O.
5
0before
after
(
A
)
僻
oo
1
0.
75
0.
50
0.
25
(
B
)
0before
after(
N
)
0.
4
0
.
3
0
.
2
0
.
1
0before
after(
C
)
図7K
−
E
課 題 練 習 前 後で の力 再 現 課 題に よ る検 査 成 績の変 化
FrcReAE
(A
),
FrcReVE
(B
),
FrcReF
丁.
〔C
).
Fr
じReVE
は 統 計 学 的 有 意に練 習 後の成 績が向.
とした.
* 震
:
P
くO
.
O
⊥Fig
.
7
Mean
±SD
of absDlute error {FrcReAE
}(A
),
varjable error {
FrcRc
、厂E
}{B
),
und standarddeviation
〔FrcRcFL
)(C
〕ealculatedfr
〔}rnthe
force
data
during
fdrce
reproductionk
sk口
indicates
the
resullbeEore
rcpaLitivcK
−
E
exer−
cise,
and ■indicates
that
after exercises.
The
result ofFrcReVE
improved
afterthe
repetitiveK
.
E
exer−
cise
.
* * :P
<0
、
OI
.
(
deg
)
4
.
0
3,
0
2
.
0
1.
0
(
A
)
0before
a
貴e
「(
deg
)
3
.
0
2
.
0
1
.
0
0before
after
(
B
)
(
deg
)
0
.
6
0
.
4
0
.
2
0before
after
(
C
)
図8
K
−
E
課 題 練習前 後で の位.
置再 現課題 に よ る検査 成 績 の 変 化.
P
〔〕sReAE 〈A
),
PosReVE
(B
),
PesReFL
(C
).
奈て の変 数に関して,
練 習前 後に
有
意 な変 化は な かっ た.
Fig
.
8
Mean
±SD
(,f
abso ]uie error 〔PosReAE
)〔A
},
variable error (
PosReVE
) (B
},
and standard
deviation
〔P
〔}sReFL >(C
)calculatedfmm
the
joiIlt
a1.
igledata
during
position reproduction
task
」
lndicates
匸he
resultbcferc
repcLi しivc
K
−
E
cxcr−
cises.
and ■indicates
that
after exercises.
There
was Ilo si篝 nificant statisticaldifference
in
th
(冫sethree
parameters.
表
2K
.
E
課 題 に よ る検 査 成 績と冉 現法課 題 に よ る検査 成 績 との相 開 係 数 を 示 し た 赧 関 行 列Table
2
A
correlation 1natrixfor
the
reLationshipbetween
the
parameters
ofthe
K
−
E
task
and
the
parameters
ofthe
reproductiontasks
.
force
reproductionposition
reproductionFrsReAE
FrsReVE
FrsReFL
PosReAE
PosReVE
PosReFL
PosKeAE
−
0
.
186
K
.
E
PosKeVE
−
0
」80
P
〔}sKeFL−
0
.
192
0
.
0590
.
0890
.
042
0
.
430
*0
.
3720
.
428
*
0
.
207
−
0
.
071
0
.
239
0530
* *−
0
.
346
0
.
085
−
〔}.
288
* *0
.
56
]−
0
.
3
ア6
*・
p 〈0
.
05
,
* *;p〈
0
.
01
(
図7B
)
。
位 置 再 現 法 で は3
つ の変 数全
て に 関 し て,
練
習前 後
の 変 化 が 統 計 学 的 に有
意 で な かっ た(
PosReAE
;=
1
.
56
,
PosReVE
;t
=
0
.
52
,
PosReFL
;t
≡−
0
.
78
) (
図
8
)
。2
.
K −
E
法と再 現法
によ る検 査 成 績
の関 係
練
習前
に 実施
し た,
K −E
法
に よ る検 査 成績
と,
再 現 法
に よ る検 査 成 績
との 関係
につ い て,
相
関係 数
を算 出
した(
表
2
)
。 その結 果
,
PQsKeAE
とFrcReFL
との 間で は能 動 的 知 覚に応じ て出 力 する 運動 課題実
施
成績
の評 価指標
に関 する研 究15
)
「N8
(
0
」0
.
6
も
orO
.
49L
O
、
2
● ● ●r
=0.
430
ρく0.
05
・ ● ● ● ●0
0
0
.
2
0
.
4
0
.
6
(
A
)
PosKeAE
(
N
)
0
.
8
」0
.
6
志
〔と0
,
49
]」0
.
2
● ・ ● ● ● ● ●(
mm
)
r=0
.
428
ρく0
.
05
●O
G
O
.
01
0
.
02
(
C
)
PosKeFL
(
mm)
(
deg
)
6
.
0
Y4
.
。醒
の82
.
0
● ● 。3
° ° r=
0
.
530
ρく0
,
01
●(
B
)
0
0
0
.
2
0
.
4
0
.
6
PosKeAE
(
deg
)
6
,
0
04
02
凵 〉 の 匡 もoO 吐 ■’
° ° ●(
mm>
r=
0
.
561
ρく0.
Ol
●0
0
0
.
Ol
O
.
02
(
D
)
PosKeFL
(
mm
)
図9
K
−
E
課 題による検 杏成 績と 内:現 法による検査 成 績の関 係
PosKcAE
とFrcReFL
(A
),
PosKeAE
とPosReVE
(B
),
PosKeFL
とFrcReFL
(C
),
PosKeFT
、
とPosReVE
(D
)との間には,
相 関が あっ た.
Fig
.
9
Relationships
between
results ofK
−
E
task
and resulLs 〔}f
reproduc−
tion
taskPosKeAE
andFrcReFL
(A
)、
PosKeAE
andPosReVE
〔B
),
PosKeFL
andFrcReFL
(C
),
PosKeFL
andPosRcVE
(D
).
There
were significant corrc 且atienshl
those
four
pairs
ofparameters
.
r