「マルチメディア通信と分散処理ワークショップJ 平成20年12月
イベントの移動性を考慮した
W S A N s
の性能評価
楊 涛
t
池田誠
t
パロリレオナルド什
f福岡工業大学大学院工学研究科知白鴎貴報システム工学専攻
tt
福岡工業大学情報工学部情総重信工学科 あらまし大規模の Wirel錨 Sensor Networks (WSNs) の省エネルギー化とイベントをリアルタイムで処理するた めに Wirel倒 Sensor and Actor Networks (WSANs) が提案された. W S A N s は従来の W S N s にアクタノードを配置させる新たなネットワークの形
.1m
である. 従来,観測領域内で行っているイベントは固定とされてきた. しかし,実 際にはイベントは動く可能性が高い. たとえば,生態環境で生物を観測する場合,生物はランダムに移動する. この 場合" W S A N s はどう作動して全体のパフォーマンスを調査する必要がある. 本稿では,イベントの移動性を考慮し, W S A N s のデータの伝送成功率 (Goodput) とルーティング効率 (Rρuting E血ciency:R E ) を評価指標として利用 する. シミュレーション結果から, A O D V を用いてイベントが移動する場合に Goodput の変化は少なb哨t,R Eは大きく上がることが分かった.
Performance Evaluation of a
Wireless Sensor
創ld
Actor Network Considering Event Movement
Yang T A O t
,
Makoto IKEDA t,
and Leon町d BAROLLI ttt Graduate School of Engineering
,
Fukuoka Institute of Technology (FIT)E-m a叫ail臼1:
{怜
bdω0拘0ω3,
bd070∞
01}陣
@bene.fi邸批tι.a飢c.j f什t Department of Infiおo r m抽a“色io
∞
n and Communication Engineering,
F I T E-mail: [email protected]Abstract Wirel鍋 鶴 田or組.dactor networks伺 且d倒1with different events in r伺 l-time. 百 e energy-sa:由g包 a very importa.nもproblem for larglωωle wirel邸 鶴 田or制 or1阻むworks. In wireless 民 国or and actor networks
,
the鶴 田ing阻.dacting are perゐrmed by sensor但ld actor nod笛 . In the previous work,
w e ∞ 凶dered th品 theevent node is stationary in the 0'凶ervation field. However
,
in many appliω,tions the event node m a y move. For位 制.ple
,
in組 側1句y environment the anim山 can move r組 dOlnly. In this work,
w e want to inv,鍋ig叫e h o wthe sensor actor network performs泊 the c邸e when the event node m o v田 . W e
∞
Impare the血nula北ion r倒 d旬for two c邸 回 : when the event node is mobile and stationary. 百le simulation r'凶ults have shown that the routing
e1ficiency for the c邸e of mobile evenもnode抱bet旬:r than the station町y event node using A O D V prot
∞
01. Also, 七h e gl∞
dput for色he mobile event node ωs e do偲 noもd 組 ge t∞
mucb,
∞
mpared with the stationary event c雌 .1
はじめに
近年のネットワーク技術や無線通信技術の発展, センサデバイスの小型化および高性自町七により,セ ンサデバイス自体に無線通信機能をもたせたセン サノードから構成するネットワークが登場してい る. 環境監視のようなシステムを構成する Wirel倒 Sensor Networks ( W S N s ) では,対象とするエリア 内の環境を継続的にセンシングし,センシングした データを管理ノードヘ定期的に送信する. また,無 線通信と M E M S 技術の発展によりデバイスサイズ は小型化されエネルギー消費量は急激に減少してい る. これにより,様々な場所で W S N s が利用されて いる. しかし,小規撲で利用する場合には問題は少 ないが,規旗カ拡大するとシンクノードまでの距離 が大きくなる. その問題を解決するために Wirel, 鴎 Sensor and Actor Networks ( W S A N s ) が提案され た. W S N s における多数のセンサにアクタノード を追加するネヅトワークを W S A N s と呼ぶ. アクタ ノードは,シンクと似ており計算能力が高く,エネ ルギーも高い. アクタノードを追加することにより, そのネットワークの応用範囲やデータ処理能力を高 めることが可能となり,ピルのコントロールシステ ム,核攻撃検測,ホームオートシステムや環境観測 システムなどに適用することができる 1,2, 3, 4) • 従来, W S A N s に適用される環境でイベントを 固定と考えている. 本稿では,環境モデルとして 単一のイベントをランダムに移動可能と想定する. 例として,図 1 に示すように始点と終点を指定し て,ランダムに移動する. シミュレーションモデル格 的
。
、
、
o
/ ' F ¥ 0 ¥ O、‘・' - 、、
)
¥
》
そ"
0 ¥ o 0t
、 , ¥ 弘 , ;。
o
0,
,
"。
EVI聞t 凶生j-
唱都
政問m 以助n 図 1 イベントの移動パターンは無線伝搬モデルT
wo-
ray groundを用いて, M o・bile Ad-hoc Network ( M A N E T ) プロトコルのA d hoc On-Demand Distance ( A O D V ) と Dy-namic Source
R o
uting (DSR) を利用し, W S A N sのRρuting Efficiency (RE) とGoodpu色に関する 評価を行うためのシミュレーションシステムを実装 した. 同じ伝搬モデル,イベントをランダムに移動 する場合,異なったルーティングプロトコルを利用 してW S A N sのR E とGoodputの変化を調べる. 本稿の構成は以下のとおりである. 2 章では W S A N sの関連研究について述べ, 3章ではW S A N s の仕組みを述べる.
4
章ではイベントの輔額制御に ついて詳述し, 5 章ではシミュレーション環境につ いて説明し, 6章では,評価するパラメータについ て説明する.7
章ではシミュレーション結果と考察 を行い,最後にまとめと今後の課題を述べる.2
関連研究
文献5) ではW S N sのパフォーマンスについてト レードオフ手法で評価を行った. しかし,従来研究 ではW S N sはイベントの移動性を考慮しなかった. 我々の従来初院では A O D VとD S Rを利用しW S N s のGoodp凶とR E
について評価を行った6,7) 広 範囲のモデルの場合,ネットワークのエネルギー消 費を減少させるためにW S A N sが利用されている. 文献めではW S A N sのネットワークトポロジ,伝 搬モデル,プロトコルなどからR E
の影響について 評価している. しかし,イベントの移動性を考慮し ていない. そこで,本稿ではイベントをランダムに 移動させるシミュレーションシステムを実装した. 評価指標としてW S A N sのGoodput とR Eについ て評価する. • ‘ • ‘ h -- -E-scr田mrzωrf副dム:町
図2 W S A N sの仕組み 図3 イベント信頼性を考慮する機構3 W S A N s の仕組み
W S A N sは図2のように,イベントが発生する範 囲にセンサとアクタノードを配置させる. センサ ノードはイベントをセンシングする. アクタはセン サがセンシングしたデータを処理する. シンクノー ドはイベント発生地戚とは遠く離れているが,セン サとアクタど通信が可能なため,ネットワーク全体 をコントロールすることが可能である. センサから センシングした情報は近いアクタを選択し1
育報を伝 える. これにより,一般的なW S N sと比減し,アク タノードを有するW S A N sは遅延を短縮し,エネル ギー消費の削減が可能である. つまり,ネットワー クの生存時間を延ばすことができる. また, W S A N s の特徴として,アクタノードは高いデータ処理能力 とエネルギーを持ち,ネットワークの通信能力が高 い. そのため,センサノードとアクタノードの距離 が,センサノードとシンクまでの距離よりも近いた め,イベントが発生時の郷里時聞が短縮できる. ア クタの配置する数はイベントによって動的に変更し 配置することができる. さらに,ノード密度が低い 部分ではアクタノードをスリープモードにすること でエネルギーの節約や,アクタ間通信を利用するこ とでトラフィックの削減をすることが可能となる.4
イベントの輯験制御
本稿では,広域モデル9) を利用して,シンクま でに転送されるパケット数を制御する. センサノードはセンシングしたデータをアクタまたはシンクま で転送する. しかし,アクタとシンクノードから近 い場所でイベントが発生した場合,センサノードは イベントを感知するとその情報を送るがイベントが アクタ,シンクに近い場合は大量のパケットが発生 し輯鞍が起こる. そのため,輯験によるパケット棄 却を減らすために,データ転送手法に信頼性が要求 される. この信頼性を提供するための機構について, 図3 に具体例を示す. 大量なデータが発生してシン クとアクタノードでオーバーフローが発生した場合, コントロール関数
/0
で郷里が起こなわれ,センサ ノードにデータ伝送速度を下げる要求を送る.5
シミュレーション環境
5.1 M A N E T
プロトコル D S R は完全オンデマンド型の経路制御プロトコ ルであり,MANET
の研究としては初期段階に提案 された始点制御ルーティングプロトコルである. 動 作メカニズムとして,フラッディングを用いる経路 発見プロセスと経路維持プロセスから構成されてお り,全てのデータパケットのヘッダに送信元から通 信相手までの経路情報を保持して,経路制御を行う. この経路情報は各中継端末がキャッシュすることで, 経路発見時間の短縮や経路切断時の回復などに用い て効率化を計る. D S R の最適化に関する機能もいく つか提案されている. たとえば,ネットワークイン タフェースカードをプロミスキャスモードにするこ とで,自分宛以外の通信パケヅトを監視し,より多 くのキャッシュ情報を取得して経路制御の最適化を 行う. 一般的に D S R の実装にはO S のカーネル部分 の変更が必要となることがあり笑装が複雑である. A O D V は,通信要求の発生毎に宛先の探索を行 う. また,特徴として各ノードはネットワークの全 体像を知らず、宛先ノードと次ホップの情報のみで ルーティングを行う距離ベクトル型のルーティング プロトコルである. このように通信開始時に宛先を フラッディングで探索するため,頻繁に通信が発生 する環境では謡駿が発生しやすく経路表を更新する のにオーバーヘッドになる恐れがある. しかし,距 離ベクトル型のプロトコルは動作がシンプルなため 改良を施すことでセンサネットワークなどの近距離 無線技術に適用することが可能だと考える10,11)5.2
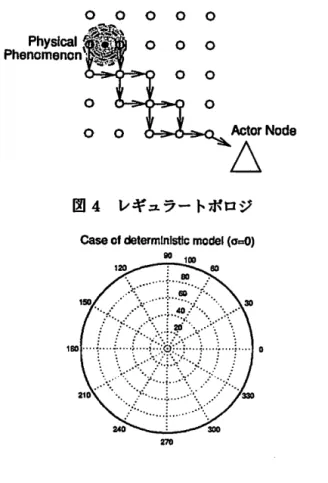
トポロジの設定 図4 にシミュレーションモデルのレギュラートポ ロジを示す12) 義する (L は正方形の底辺の長さ ,x はノード数を Physi伺l Phenomenono
0 0 0 0 図4 レギュラートポロジ 図 5 T wo-ray gr・ound 伝鍛モデル 示す) . シミュレーション・パラメータとして,観 測範囲を 800X 800[m2],ノード数を 12,64, 100, 256で評価を行った. 本稿では,イペントの移動環境を模擬するため, イベントの発生位置は始点から終点に向かつてラ ンダムに移動する. 移動体として車を想定し,移動 速度は等速ではなくランダムである. 各シミュレー ションのイベント開始点と終点を回定し途中の移動 パターンはランダムである. シミュレーション時間 は 30 秒と設定した. ネットワークシミュレータと して, ns・213) を利用し,ルーティングプロトコル はM A N E T のA O D V とD S R を用いる. 5.3 無線伝搬モデル 本稿では,無線伝鍛モデルとして T wo-ray ground を利用する. 図 5 にTwo-ray ground 無線伝搬モデ ルの特徴となる伝送距離を示す. このモデルは伝送 距離が中心から放射状に円を描くため,伝送距離は 等しく障害物が少ない環境に適応力が高い. T w cト ray ground の受信電力( 九〉の計算式を式 (1) に 示す14)九(d)
=
乃ー β(dU3) • (1) ー((4π
が
L ¥
r=
101oe: f。¥
'.--:"='
G t Gr入,2J
G r, Gtは宛先ノーに送信元ノードのアンテナの 利得である. 入は波長 L はアンテナの挿入損失であ る.β は無線伝搬PathL o 閣である. オムニアンテ ナの場合 Gr=
Gt=
1である. 信号の減衰は距離 の二乗に比例する. そして, Two-ray groundは 送信元ノードから宛先ノードまで,信号地面反射が 存在する場合に適用する. そのため,受信電力もア ンテナの高さと PathL088
に影響する 15). hr, ht は宛先と送信元のアンテナの高さである.β によっ て九は減少しやすい.β とん,ht
およびG r,G tの 関係は式 (2) を示している.一(
(4πd)4L ¥
β = 1010gI
内i
o ¥ GtGrhthr入2J
6
評価パラメータ
(2) イベントが移動するとシンクまでの経路が動的に 変わる. そこで,センサからシンクまでパケットを 伝送の安定性を調査するため, Goodput をパラメー タとして評価した. Goodp凶はシンクノードにすべ てのノードから送られたパケットの到着率である. 式 (3) に Goodput の計算式を示す. (r) G∞
d仰t ( T ) = ( 3 )Nsent(r) また,我々はプロトコルのルーティング効率をパラ メータとして評価した. R Eの計算式を式 (4) に 示す.R E
( 7 ) = ( 4 ) N rωting(r) 時間をはし,N rout切(r)
はルーティングプロト コルを利用して送信したパケット数,Nsent(r)は全 センサノードが送ったパケット数を表している. 単 位時間内でルーティングプロトコルを利用して送っ たパケット数が多い場合,R E
が寓くなる.R E
は 経路制御部だけではなく周囲の環境などに大きな影 響を受ける. そこで,本稿ではトポロジ,プロトコ ル,無線伝搬モデルから W S A N s にどのような影響 があるかを調査するとともに, トポロジ,プロトコ ルおよび伝搬モデルのトレードオフ関係を調べる.7 シミュレーション結果と評価
図6 (a) にA O D V を用いて,イベントが動いてな い場合の W S A N s のR Eの平均値を示している. 横 軸は伝送レートを示す. ノード数が多くなると,R E 値は低くなった. これは,ノード数が多くなったた め,経路構築に時間がかかったためである. 次にイ ベントが動いた場合の結果を図 6 (b) に示す'.R E
値はイベントが固定している場合と比較するとイベ ントが動く場合のほうが高くなることが分かった. .図 7 (a) はイベントを固定した場合の Goodput の 平均値で,図 7 (b) はイベントが動く場合の Good-p凶の平均値である. シミュレーシヨャン結果から,イ ベントが動き,ノード数が増加した場合に. . Good-plltが下がることが分かった. そしてイベントを 固定した場合は Goodp叫が安定した. 次に, D S R を用いた場合のイベントが動く場合と 固定する場合のR Eの結果を図 8 (a) , (b) に示す. 結果として,R Eはイベントを固定する場合のほう が安定している. イベントが動く場合は図 9 (b) に 示すように? 伝送レートが低く,ノード数が増える とR Eがかなり不安定になっている. しかし,伝送 レートが 10PI溜を超えると R Eは安定した. つまり, R Eはイベントを固定した場合よりランダムにした ほうが高くなることが分かった. D S R を用いた場合 のイベントが動く場合と固定する場合の Goodput の結果を図 9 (a) , (b) にそれぞれ示す' . Goodput はイベントが動く場合よりイベントを固定する場合 のほうが安定して高くなっている. イベントが動く 場合はノード数が増えると, Goodput はかなり下 がっていることが分かった. 総括として, A O D V は全てのノードの経路表を 更新するために大量のルーティングパケットを必 要とするため R Eの値が低くなったと考えられる. Goodputについては D S R より A O D V のほうが高 くなった. パケヅトの転送は,経路表に従って行う のではなく,パケットの発信元があらかじめ全体の 経路を指定する方式を用いている. そのため,通信 が開始するまでに時間がかかり,パケット棄却も発 生した.8
まとめと今後の課題
本稿では W S A N s のイベントの移動性について ネヅトワークの Goodput とR E
の二つのパラメー タを利用して定量的に評価を行った. 結果として, イベントが移動する場合に D S R より A O D V を利 用した場合のほうが W S A N s の Goodput が安定し た結果となった. また,ノード数が増加した場合に もGoodpllt は高くなることが分かった. さらに,イ ベントを固定する場合よりイベントが動く場合のほ うがR E
の値のほうが高くなることが分かつたが,, ,
, 向。凶咽E 1 I I d 開cy(AODY,T間 R ayGrout叫
lrr
Routlng E恥lency(AODV.TwoRay G剛nd,Mob!le) d 10' 10'同
1 0 2 ,tI 自 a tO419LFT ・ 1品渇} 1" 1(1 lr1τ
品掲}
lr1 1fT (a)固定イベント (b) 移動イベント 図6 A O D Vを用いた場合のR E
の結果 u CUI 0.7 u CUI 1',)Q.5“
Q.4 Cl,I 0.3 o.z 0.2 0.1 0.1 otah 「. 11 rJttc.,
OtoLh T IrIτ
品抱}
(a) 固定イベント (b)移動イベント 図7 A O D Vを用いた場合のGoodputの絡果 A O D Vを用いた場合のほうがR E
は安定した. こ参考文献
れにより, D S Rではトラフィックが多く発生した場 1) S. Giordano 創ld C. Rosenberg, ''Topi偲 in A d・
合でもW S A N sに適用できることが分かった b∞ 阻d Sensor Networks" , IEEE Communication M a g錨 凪e,Vol. 44, No. 4, pp. 97-97, 2
∞
6.今後の課題として, D S Rを用いた場合のトラフイヅ
2) J. N. Al・Karaki and A. E. Kamal
,
"Rρuting 11叫 ーク数が少ない場合に
R E
が不安定になる問題と,イ niqu回 in W 註d邸 Sensor Networks: A Survey",ペントが動く場合にG o o d p叫が下がる問題を解決す IEEE Wire胸 C om m叫 叫ion,Vol.ll, No. 6, pp.
るために,イベントの移動性に対応したアクタノー 6-28, Dec但 ber 2
∞
4.ドの移動手法について提案していく. また,イペン 3) I. F. Akyildiz組 d 1. H. Kasimoglu, "Wire1e錨 Se
n-,
r and A cぬr Networks: Researc h αla1leng
錨
",
トの移動性を考慮したW S A N sのエネルギー消費問 A d H
∞
Networks (Elseviぽ), V ol. 2, No. 4, pp.題,新たなアクタノードの配置,イベントによって 351・367,2
∞
4.のアクタノード数およびモバイルアクタについて研 4) O. Younis 釦.d S. Flぬm y," H回,0 : A Hybrid,
究を進めていく Energy-efficient,Distributed αust剖ng Appro叫
謝辞
本研究は日本学術振興会と財団法人国際コミュニ ケーション基金からの研究費による成果である. こ
こに記して謝意を表す.
for Ad-h
∞
Sensor Networks",
IEEE Tr組組.ctions on Mobile白 mputing,VoL 3, No. 4, pp. 366-379,2
∞
4.5) S.宝il山 n d
,
N. B. Abu-Ghazaleh,
8 J ld W . Heinzel-m a n,
“Infrastructure 骨adω,ffs for SelUlSOr Ne・も1rJ frJ 1r1 frl trl T
ぷ
s) 1t1 1o' 1r1 τ訴事}
10* trJ (a) 固定イベント ( b ) 移動イベント 図8 D S Rを用いた場合のR E
の結果 o.a 回 0.1 1r1 Tん}
f
.T
lc1 (a) 固定イベント (b)移動イベント 図9 D S Rを用いた場合のGoodputの結果 work",
pr∞.
of A C M W S N A 2∞
2 (USA),
pp. 4 9-58,
September 2∞
2. 6) T. yi釦g,G. D e M a r∞
l , M. Ik凶a卸ld L. Barolli,“
:PerゐrmanωEvaluation of a Wirel舗 Sensor Networkund釘 Di1JerentRadio PropagationMod-elSヘ
Proc. ofFIT-2006 (F¥加oka., Japan),
pp. 12与130
,
September 2∞
6.7) T. yi釦 g
,
L. Barolli,
M . Ikeda,A. Durresi and F.X hafa, " PerformanωEvaluation of Rβactive and Pr,併以ive Protocolsお,r Ad-Hoc Sensor N e加IOrks
Using Di1Jerent Radio Models
ヘ
Jolirnal of Inter-∞
m 倒 ion Networks (JOIN) , Vol. 8, No. 4, pp.387.・405
,
D民 釦lber 2∞
7.8) T. yi叫, M . T h 叫and L. Ba.rolli,“'Perform阻 僧 Evaluation of Rρuting Efliciency of Sensor and A d hocNet明治.rks using Di1Jerent R訓五.0Models"
,
Pr
,
∞
.
of D I C O M0-2∞
8 (Sapporo, Ja:戸Jl), pp. 102・107,
July 2∞
8.9) O. B. Ala.n and 1. F. A kyildiz,“Even抗 争S泊k
R eliableτra.nsport in Wirel偲sSensor Networks"
,
IEEE/ A C M ' f r 組邸もions on Networking
,
V oI. 13,
No. 5
,
pp.1∞
3-
1016,
2∞
5.10) C-K. Toh,構造計画研究所訳『アドホックモバイル ワイヤレスネットワークJ,共立出版,2
∞
3. 11) C. Perkins,
Edi伽.“A d H∞
N e同 rks",
Addi蜘 ・Wesley
,
2∞
1.12) C . α>oper
,
"A Note on the Conn倒 ivity of2戸regt血r Digraphs"
,
R岨 d o m Structur留 Algcトd凶1mS,Vol. 4, pp. 46仏472,1993.
13) 1.降2
,
Network Simulator 2,
h'悦p://wwv.isi.edu!nsn阻 /n8/.
14) A. Salhieh and L. Schwieb叫 “P ower-・aware M eト
ric for Wirel倒 Network"
,
Inteロlational Journal ofComputers and Appli叫 ions,Vol. 26, No. 2, pp.
119・125
,
2∞
4.15)
L.α
由t組 側 ,T . H . αa臨 :n,G.H . 幽 印 刷G. Behrm組 n,
" T he Optimized Link State R outing Prot∞
01,
EVl叫uationτ'hrough E却erInlents 血ld Sim叫ation",
Pr,
∞
.
of IEEE Symposium on Wire・le謂 Personal Mobile Com m u凶.cations