宇宙開発への情報技術の貢献:2.小惑星探査機「はやぶさ2」 -深宇宙のための自律化技術-
5
0
0
全文
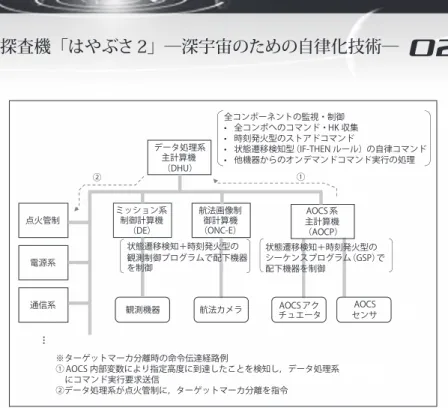
(2) 小惑星探査機「はやぶさ 2」─深宇宙のための自律化技術─. 自動化自律化機能 はやぶさ 2 の,自動化自律化にかかわ. ②. るブロック図を図 -2 に示す. はやぶさ 2 に実装されている自動化自. を活用した自律化,について解説する.. 通信系. 意している.このコマンドにより,たとえば,. AOCS アク チュエータ. 256 (MAX). ンク/ダウンリンクで使用するアンテナを. MC000 MC001 MC002 ・ ・ ・ MC254 MC255. TC00 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. TC01 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. TC02 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. MC : Macro TC : Telecommand. 図 -3 DHU SMC(Short Macro Command)機能. LMC (Long Macro Command ). 128 TC Packets (MAX). SMC は,ある「やりたいこと」を実現する 32 (MAX). あるが,コマンドによっては,実行後に待ち 時間が必要なものがある.たとえば,CPU. MC256 MC257 MC258 ・ ・ ・ MC286 MC287. TC00 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. TC01 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. TC02 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. ・・・ ・・・ ・・・ ・ ・ ・ ・・・ ・・・. を ON してからコマンド受信できるようにな. Command interval is 1×n sec.. るまでの待ち時間などである.そのような場. (When n=0, time interval is 100ms and no. 時間で指定し,一連のシーケンスを実行する. TC19 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. 32bytes (MAX). (The other CMDs are inhibited in this time. ). レーションは気にせず, 「やりたいこと」に. TC18 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. ・・・ ・・・ ・・・ ・ ・ ・ ・・・ ・・・. 100ms interval. 選択する.運用者は,細かいコンフィギュ. 合にも対応できるよう,コマンド間隔を相対. AOCS センサ. 20 TC Packets (MAX). ら複数の RF スイッチを切り替え,アップリ. ずに実行するよう)パッケージ化したもので. 状態遷移検知+時刻発火型の シーケンスプログラム(GSP)で 配下機器を制御. 図 -2 自動化自律化関連ブロック図. DHU(Data Handling Unit)内に SMC を用. 一連のコマンドを, (基本的には時間を空け. AOCS 系 主計算機 (AOCP). 航法カメラ. 観測機器. このための機能として,はやぶさ 2 では,. 対応する SMC を実行すれば良い(図 -3) .. 航法画像制 御計算機 (ONC-E). ※ターゲットマーカ分離時の命令伝達経路例 ① AOCS 内部変数により指定高度に到達したことを検知し,データ処理系 にコマンド実行要求送信 ②データ処理系が点火管制に,ターゲットマーカ分離を指令. SMC (Short Macro Command). RF(Radio Frequency,電波)を OFF してか. ①. …. ♦♦DHU 自動化(運用の省力化). 1 コマンドで実行できると便利である.. 全コンポーネントの監視・制御 • 全コンポへのコマンド・HK 収集 • 時刻発火型のストアドコマンド • 状態遷移検知型(IF-THEN ルール)の自律コマンド • 他機器からのオンデマンドコマンド実行の処理. 状態遷移検知+時刻発火型の 観測制御プログラムで配下機器 を制御. 電源系. の土台となる自動化,次に②自動化機能. 複数の機器に対する複数のコマンドを,. ミッション系 制御計算機 (DE). 点火管制. 律化機能について,まずは①自律化運用. データ処理系 主計算機 (DHU). 02. TC126 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. TC127 TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. 32bytes (MAX). (n=0~255; integer) other CMDs can interrupt.). 図 -4 DHU LMC(Long Macro Command)機能. ものとして LMC がある.LMC により,はや ぶさ 2 は,1 コマンドで「一連の運用シーケンス」を. 多くの機器で実装している Watch Dog Timer 機能を,. 実行できる.LMC は複数(最大 32)の同時動作が可. 探査機としても持ちたいときがある(たとえば,10 日. 能である(図 -4) .. 間地上からのコマンドを受信しない場合,受信機を. ST (System Timer). 切り替える等).このような用途のために用意してい. 探査機運用では,周期的に何かを実行したいとき. るのが ST である.. がある(たとえば,10 分に 1 回撮像したい等).また,. ST は時限タイマであり,コマンドでタイマリセット. 情報処理 Vol.56 No.7 July 2015. 661.
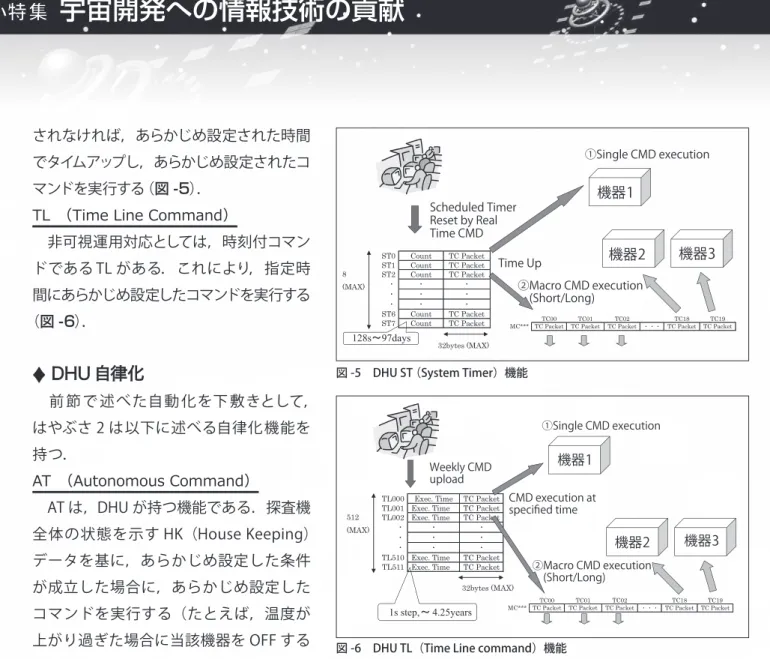
(3) 小特 集. 宇宙開発への情報技術の貢献. されなければ,あらかじめ設定された時間 ①Single CMD execution. でタイムアップし,あらかじめ設定されたコ マンドを実行する(図 -5) . TL (Time Line Command) 非可視運用対応としては,時刻付コマン ドである TL がある.これにより,指定時 間にあらかじめ設定したコマンドを実行する (図 -6) .. ♦♦DHU 自律化. 機器1. Scheduled Timer Reset by Real Time CMD 8 (MAX). ST0 ST1 ST2 ・ ・ ・ ST6 ST7. Count Count Count ・ ・ ・ Count Count. 128s~97days. TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. 機器2. Time Up. 機器3. ②Macro CMD execution (Short/Long) TC00 MC*** TC Packet. TC01 TC Packet. TC02 TC Packet. ・・・. TC18 TC Packet. TC19 TC Packet. 32bytes (MAX). 図 -5 DHU ST(System Timer)機能. 前 節 で 述 べた自動 化を下 敷きとして, はやぶさ 2 は以下に述べる自律化機能を. ①Single CMD execution. 持つ. AT (Autonomous Command) AT は,DHU が持つ機能である.探査機 全体の状態を示す HK(House Keeping). 512 (MAX). データを基に,あらかじめ設定した条件 が成立した場合に,あらかじめ設定した. TL000 TL001 TL002 ・ ・ ・ TL510 TL511. Exec. Time Exec. Time Exec. Time ・ ・ ・ Exec. Time Exec. Time. TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. CMD execution at specified time. 機器2. 32bytes (MAX). コマンドを実行する(たとえば,温度が 上がり過ぎた場合に当該機器を OFF する. 機器1. Weekly CMD upload. 1s step, ~ 4.25years. 機器3. ②Macro CMD execution (Short/Long). TC00 MC*** TC Packet. TC01 TC Packet. TC02 TC Packet. ・・・. TC18 TC Packet. TC19 TC Packet. 図 -6 DHU TL(Time Line command)機能. 等) .これにより,長い伝搬遅延時間や非 可視時間帯のため,リアルタイムで状況が把握でき. 姿 勢 制 御, 軌 道 制 御, 各 種 FDIR(Failure Detec-. ない場合でも,探査機に自分で判断させ,危険を回. tion, Isolation and Reconfiguration)の機能を持つ. 避できる(図 -7).. が,アプリオリで設定されている上記機能に加えて,. REQ (User Request Command). 軌道上でプログラミング可能な GSP(Guidance Se-. AT は集中制御であったが,はやぶさ 2 は分散制. quence Program)機能を持つ.ここでは,本 GSP. 御の仕掛け REQ も持つ.REQ 機能により,DHU-. 機能について解説する.. PIM(Peripheral Interface Module)バスに接続さ. GSP で は, 条 件 判 定 テ ー ブ ル CBT(Condition. れた任意の機器からのトリガで,あらかじめ DHU. Branch Table)を 8 ページ持っており,運用フェー. 内に登録したコマンド(主にトリガ源以外の機器に. ズごとに,その中の 1 ページを使用する.それぞれ. 対するコマンド)を実行できる(図 -8) .. のページにおいて," 状態 " を最大 256 個定義でき. ♦♦AOCS 自動化自律化(GSP). ド(タイマ操作,DE(Sensor Digital Electronics). 前項で述べた REQ は機器間協調制御の仕掛けで. 観測プログラム実行,ACFS へのコマンド(REQ 発. あるが,これが活きるためには,DHU 以外の機器. 行含む))や,状態遷移条件が紐づけされている.. での自動化自律化が必要である.まずは,AOCS. GSP を起動すると,探査機のイベントに対応して,. (Attitude & Orbit Control System)の自動化自律化. CBT で定義された状態遷移が実行され,必要なコマ. 機能について述べる.AOCS の主計算機の搭載ソフ ト(ACFS : Attitude Control Flight Software)にて,. 662. る.各 " 状態 " には,その状態で実行すべきコマン. 情報処理 Vol.56 No.7 July 2015. ンドが順次実行される..
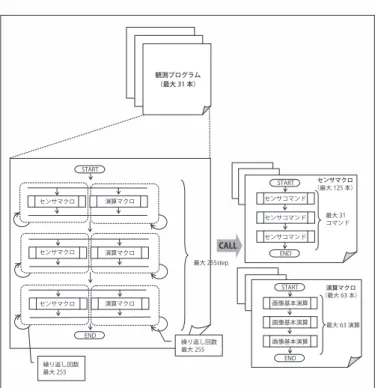
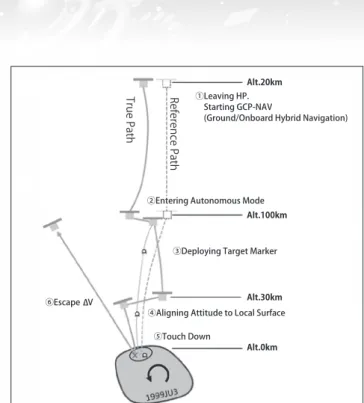
(4) 小惑星探査機「はやぶさ 2」─深宇宙のための自律化技術─. 02. ♦♦DE 自動化自律化(観測プログラム) TC00 MC*** TC Packet. 次に,DE の自動化自律化機能(観測 観 プ ロ は DE 配 下 に あ る 4 つ の セ ン サ(ONC : Optical Navigation Came r a , T I R : T h e r m a l I n f r a r e d I m a g e r,. 32 (MAX). Comparison cycle is 8s.. NIRS3 : Near Infrared Spectrometer, コマンド送出,テレメトリデータ受信, の記録をプログラムするためのものであ. Check HK Check HK Check HK ・ ・ ・ Check HK Check HK. ・・・. TC18 TC Packet. TC19 TC Packet. TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. (1)Single CMD execution. 32bytes (MAX). Value Comparison Previous HK Constant Number > Cur.HK Prev.HK+B Cur.HK > Const. = Cur.HK Prev.HK Cur.HK = Const. < Prev.HK-B Cur.HK < Const. Cur.HK ≠ Prev.HK Cur.HK ≠ Const. Cur.HK |Cur.HK-Prev.HK| > Bias. 図 -7 DHU AT(Autonomous command)機能. る(はやぶさ 2 で新たに導入).1 step. 機器2. 機器1. ごとに,センサ制御を行うための「セン サマクロコマンド」と,DE が画像処理. Request. をするための「演算マクロコマンド」が. Trigger. 指 定 で き る. こ の 2 つ は 1step 内 で 同. 32 (MAX). 時に動作し,両者とも終了した時点で次 の step に進む.センサマクロコマンド 側には実行時間間隔も指定でき,これに より,相対時刻指定の一連のシーケンス. Condition Condition Condition ・ ・ ・ Condition Condition. Type: Bit Comparison Compared to: Previous HK Constant Number Cur.HK=1 & Prev.HK=0 Condition: Cur.HK=1 & Const.=0 Cur.HK=0 & Prev.HK=0 Cur.HK=0 & Const.=0 Cur.HK = Prev.HK = Const. Cur.HK Cur.HK=1 & Prev.HK=1 Cur.HK=1 & Const.=1 Cur.HK=0 & Prev.HK=1 Cur.HK=0 & Const.=1 Cur.HK ≠ Prev.HK Cur.HK ≠ Const.. D C A M3 : D e p l o y a b l e C a m e r a) への 各種画像処理,DR(Data Recorder)へ. AT00 AT01 AT02 ・ ・ ・ AT30 AT31. TC02 TC Packet. (2)Macro CMD execution (Short/Long). HK collection. プ ロ グ ラ ム: 観 プ ロ ) に つ い て 述 べ る.. TC01 TC Packet. 機器3 機器4. ①Single CMD execution REQ00 REQ01 REQ02 ・ ・ ・ REQ30 REQ31. TC Packet TC Packet TC Packet ・ ・ ・ TC Packet TC Packet. ②Macro CMD execution (Short/Long) TC00 MC*** TC Packet. TC01 TC Packet. TC02 TC Packet. ・・・. TC18 TC Packet. TC19 TC Packet. 32bytes (MAX). 図 -8 DHU REQ(User Request Command)機能. を実行することができる(図 -9).. 自動化自律化運用の実際. 観測プログラム (最大 31 本). これまでに述べた自動化自律化機能は,それ ぞれが単独でも動作するが,個々の自動化自律化 機能の Enable/Disable を介して相互に影響し合 い,全体として高度で複雑な機能を実現していく.. START START センサマクロ. 自動化自律化の,はやぶさ 2 としての活用例を以 下に示す.. センサコマンド. センサマクロ. 徴点を人間の目で判断して誘導する方法(GCPNAV:Ground Control Points Navigation)をと. 最大 31 コマンド. センサコマンド END. 最大 255step. START 画像基本演算. 演算マクロ. センサマクロ. 画像基本演算. ら小惑星に向かって降下していく.このとき, 水平方向については,ONC 画像に基づき,特. CALL. 演算マクロ. 図 -10 は,タッチダウンシーケンスである. ①では,高度 20km の HP(Home Position)か. センサマクロ (最大 125 本). センサコマンド. 演算マクロ. END. 繰り返し回数 最大 255. 繰り返し回数 最大 255. 演算マクロ (最大 63 本). 最大 63 演算. 画像基本演算 END. 図 -9 DE 観測プログラム機能. るが,垂直方向は ACFS による自動制御である. ②以降は 6 自由度とも自動制御となり,③で TM. ⑤でタッチダウン(TD).TD 検知後は自動で離脱. (Target Marker)を分離,④で小惑星表面にならい, (⑥)する.このシーケンスを実現するのに,メイ. 情報処理 Vol.56 No.7 July 2015. 663.
(5) 小特 集. 宇宙開発への情報技術の貢献. Alt.20km. Reference Path. True Path. ①Leaving HP. Starting GCP-NAV (Ground/Onboard Hybrid Navigation). 今後の予定 はやぶさ 2 は,2015 年 12 月に地球 swing-by し, 2018 年 6 月~ 7 月ごろに小惑星 1999JU3 とランデ ブ.そこで,本稿で述べた自由度の高い自動化自律. ②Entering Autonomous Mode Alt.100km. 化機能を駆使して,タッチダウン等の複雑なミッシ ョンを実施.その後は,2019 年 11 月~ 12 月ごろ. ③Deploying Target Marker. V. ⑥Escape V. Alt.30km ④Aligning Attitude to Local Surface ⑤Touch Down. Alt.0km. 図 -10 自動化自律化を活用したタッチダウン. に小惑星を出発,2020 年 11 月~ 12 月ごろに地球 に帰還する予定である. 参考文献 1)Tsuda, Y., Yoshikawa, M., Abe, M., Minamino, H. and Nakazawa, S. : System Design of The Hayabusa 2 – Asteroid Sample Return Mission To 1999 JU3, ActaAstronautica, Vol.90, pp.356–362 (2013). 2)Riedel, J. E., et al.: Navigation for the New Millennium: A u t o n o m o u s N a v i g a t i o n f o r D E E P S P A C E 1, E S A S P, No.SP-403, pp.303–320 (1997). (2015 年 4 月 17 日受付). ンのシーケンスは AOCP(Attitude & Orbit Control Processor)の ACFS と GSP,各種安全処置は DHU の AT,AOCP から他機器へのコマンドは DHU の REQ 経由, 各種観測は DE 観測プログラムを使用する.. 大島 武 ■ [email protected] 1990 年東京大学工学系大学院電子工学専攻修士課程修了.同年 NEC 入社.衛星搭載用ディジタル機器開発を経て,1996 年小惑星探査機は やぶさシステムマネージャ,2007 年金星探査機あかつきプロジェクト マネージャ,2010 年小惑星探査機はやぶさ 2 プロジェクトマネージャ, 2015 年ジオスペース探査衛星 ERG プロジェクトマネージャ. 津田雄一 ■ [email protected] 2003 年東京大学大学院工学系研究科航空宇宙工学専攻博士課程修 了.博士(工学).同年宇宙航空研究開発機構助教.2014 年同准教授. 2007 〜 08 年ミシガン大学およびコロラド大学客員研究員,軌道工 学・誘導制御,宇宙機システムの研究開発教育に従事.現在,小惑 星探査機はやぶさ 2 プロジェクトマネージャ.. 664. 情報処理 Vol.56 No.7 July 2015.
(6)
図
関連したドキュメント
ductile fracture stage から brittle fracture stage へ移行する点(Point 1)と brittle fracture stage から final degradation stage に移行する点(Point 2)を決定する
本稿では , これらを , それぞれ Frobenius 的大域的実化テータフロベニオ イド (Frobenius-like global realified theta Frobenioid), Frobenius 的大域的実化
特に, “宇宙際 Teichm¨ uller 理論において遠 アーベル幾何学がどのような形で用いられるか ”, “ ある Diophantus 幾何学的帰結を得る
【対策 2】経営層への監視・支援強化 期待要件 4:社内外の失敗・課題からの学び 【対策 3】深層防護提案力の強化 期待要件
はじめに 中小造船所では、少子高齢化や熟練技術者・技能者の退職の影響等により、人材不足が
©2021 Happy Elements K.K/スタライプロジェクト)において、ユークス独自の技術により担当楽曲およびMCのCG制
第4 回モニ タリン グ技 術等の 船 舶建造工 程へ の適用 に関す る調査 研究 委員 会開催( レー ザ溶接 技術の 船舶建 造工 程への 適
はじめに
