微小振動する形状記憶合金ワイヤを用いた触覚センサ
宮戸田顕音
†a)重宗
宏毅
††三輪
貴信
††澤田
秀之
††A Tactile Sensor Using a Shape-memory Alloy Wire During Vibration
Akito MIYATODA
†a), Hiroki SHIGEMUNE
††, Takanobu MIWA
††,
and Hideyuki SAWADA
††あらまし 触覚感覚の計測やセンシングを行うデバイスには様々なものが提案されているが,これらを同時に 行える素子があれば,デバイスの簡略化と小型化が期待できる.我々は,形状記憶合金(SMA)ワイヤに着目し, 単一素子によって触覚の提示とセンシングを同時に行うことができる触覚デバイスを開発した.既に,SMA ワ イヤに微小振動を生じさせ,人体の触覚認知の特性を利用することで様々な触覚感覚を提示できることがわかっ ている.本論文では,形状記憶合金を微小振動させたアクチュエータが,触覚提示デバイスだけでなく,触覚セ ンサとしても利用できることを基礎的な実験結果とともに示す. キーワード 形状記憶合金ワイヤ,触覚センサ,触覚ディスプレイ,微小振動,超弾性現象
1.
ま え が き
人間は言葉や身体,五感を用いてコミュニケーショ ンをおこなっている.遠隔地同士のコミュニケーショ ンや各種機器の操作,障碍者支援ツールとして,様々 なヒューマンインタフェースが開発されてきた.カメ ラや映像ディスプレイといった視覚を利用するものや, イヤホンやマイクといった聴覚を利用するものは,汎 用機器として広く普及している.更に,それらに続く 新たなインタフェースとして,拡張現実技術の発展に 後押しされ,触覚を利用するインタフェースへの関心 が高まっている.その実現には,触覚を提示するディ スプレイと触覚を計測するセンサが必要となる. 触覚ディスプレイの研究では,より現実に近い感覚 を生成することが求められ,これまでに超音波[1]や 静電気[2],モータ[3],電気刺激[4]などを用いた方法 が提案されている.一方,触覚センサの研究では,空 間・時間分解能の向上が求められており,フォトトラ †早稲田大学大学院先進理工学研究科,東京都Graduate School of Advanced Science and Engineering, Waseda University, 3–4–1 Okubo, Shinjuku-ku, Tokyo, 169– 8555 Japan
††早稲田大学理工学術院,東京都
Faculty of Science and Engineering, Waseda University, 3– 4–1 Okubo, Shinjuku-ku, Tokyo, 169–8555 Japan a) E-mail: [email protected] ンジスタ等の光素子[5]や,圧電素子[6]を用いた手法 が提案されている.しかしながら,これらの研究では 繊細な触覚を提示する困難さや,センシング時の消費 電力の大きさなどの様々な課題を個々に抱える.特に, 触覚の提示とセンシングを同時に行える単一の素子や デバイスは実現されておらず,デバイスの小型化に向 けた大きな課題となっている. 我々はこれまでに,形状記憶合金(SMA)ワイヤに 微小振動を起こして触覚感覚を提示する,微小振動ア クチュエータを開発してきた[7].このアクチュエータ は,パルス電流を流すことにより,300Hzまでの広範 囲の周波数で振動し,様々な触覚感覚を提示すること が可能である.また複数のアクチュエータを同時に, あるいは時間差をつけて駆動することで,触覚の高次 知覚であるファントムセンセーションや仮現運動を生 起させて,多様な接触感覚や物体の移動感覚などの提 示を実現している[8], [9]. 更に,35cm長のSMAワイヤを利用し,定電流を 流した状態で,ワイヤに加わる力を計測できるという 報告がある[10].単一のSMAワイヤで触覚の提示と センシングを同時に行うことが可能となれば,触覚イ ンタフェースを簡素かつ小型に実装できる.本論文は, SMAワイヤに微小振動を生成して触覚感覚を提示し ながら,同時にワイヤにかかる力を計測する手法を提 案する.触覚センシングについて,実験により適用可
する.4.では,作製したデバイスの性能を検証するた めの三つの実験について述べ,5.でその結果を示す. 6.では,得られた結果に対する考察を述べ,最後に7. で結論を記す.
2. SMA
ワイヤの特性
SMAには,形状記憶効果と超弾性現象という二つ の特性がある[12]. 図1にSMAの形状記憶効果を示す.SMAは温度に よって,マルテンサイト変態と逆マルテンサイト変態 (逆変態)と呼ばれる結晶の構造変化が起こる.オース テナイト相は高温側での結晶構造であり,金属の形状 が記憶されている.一方,マルテンサイト相は低温側 の結晶構造である.オーステナイト相において変態温 度(Mf)以下になると結晶構造が変化し,マルテン サイト相へと変態する(マルテンサイト変態).マル テンサイト相において外力により負荷を与えると,結 晶がひずんで塑性変形を起こし,形状が変化する.マ ルテンサイト相のSMAを再び変態温度(Af)以上に なるよう加熱すると,逆変態が起きオーステナイト相 に相変態を起こすため,記憶された形状が回復する. 本研究で用いるSMAワイヤは,長さ方向に結晶構 造を形成した糸状SMAであり,相変態に伴って,形 状記憶効果により長さ方向に伸縮する.図2に示すよ うに,温度による相変態によって,長さ方向に最大で 図 1 形状記憶合金の形状記憶効果 一方の超弾性現象は,形状記憶合金の結晶構造が オーステナイト相と応力誘起マルテンサイト相の間で 可逆的に変化する現象である.形状記憶効果が温度変 化に伴う相変態によって起こるのに対し,超弾性現象 はSMAが変態温度(Mf)より高い温度にあるとき, 外力による負荷に起因して起こる現象である.図3に その過程を示す.SMAに外力が加わると,SMAの状 態はオーステナイト相から応力誘起マルテンサイト相 に変化し,除荷すると元のオーステナイト相に戻る. このとき,相状態に応じてSMAの抵抗率が変化する. また,ある種のSMAは,変態の過程でR相と呼ばれ る菱面体晶系の結晶構造を経て,単斜晶系のマルテン サイト相へ変態するが,このR相変態は高い時間応答 性をもつことが知られている.したがって,R相変態 する超弾性現象を利用すれば,SMAワイヤに加わる 外力の大きさの変化を,電気抵抗値の変化として高い 時間分解能で取り出せる.本研究では,このR相変態 に伴う超弾性特性を触覚センシングに利用する. 図 2 SMAワイヤの温度特性 図 3 形状記憶合金の超弾性現象図 4 触覚デバイスの概要と外観
3. SMA
ワイヤを用いた触覚デバイス
SMAワイヤには,トキコーポレーション(株)のバ イオメタルファイバ(BMF75)を用いた.このSMA ワイヤは直径が75µmで,Mf = 72◦Cまで加熱され ると最大5%程度長さ方向に収縮し,Af = 68◦Cまで 下がると元の長さに戻る. 作成した触覚デバイスの概要とその外観写真を図4 に示す.長さ12mmのSMAワイヤの両端を,エポ キシ基板に圧着する.エポキシ基板は横幅が15mm, 縦幅が4mm,厚さが1mmのもので,SMAの両端に 導線をはんだ付けすることで,パルス電流を流す設計 としている.また,SMAワイヤの中央部に金属製の ピンを取り付け,その上部に皮膚で接触することで, 様々な触覚感覚が提示される.ピンの直径は1.2mm で,下端に切られた溝にSMAワイヤを通して圧着し ている. SMAワイヤはパルス電流を流すことにより,ON時 にジュール熱による発熱が起こり,OFF時には自然放 熱により冷却される.このときの温度変化によってマ ルテンサイト変態及び逆変態が起こるので,SMAワ イヤが伸縮を起こしてピンが上下運動を繰り返す.こ れによりSMAワイヤの伸縮を微小振動として取り出 せるので,ピンの上部を皮膚に接触させることで触覚 感覚が提示できる. 触覚センシングでは,皮膚がピンに触れた際の接触 力が,ピンを通じてSMAワイヤに伝わる.超弾性特 性に従って,応力によってSMAワイヤの相変態が誘 起されるので,SMAワイヤの電気的抵抗値が変化す る.これを計測することで,触覚を計測する.4.
実
験
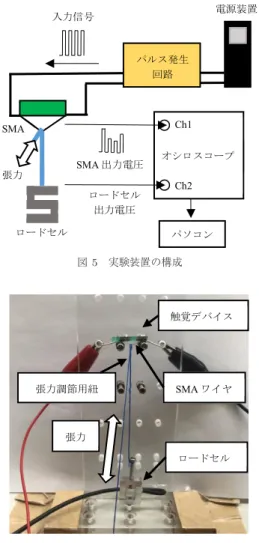
4. 1 実 験 装 置 触覚デバイスの力応答を測定するための実験を行っ た.SMAワイヤにかかる応力を正確に測定するため, 図 5 実験装置の構成 図 6 実 験 装 置 触覚デバイスからピンを取り除いたものを用いて実験 を行った.図5に実験装置の構成を,図6にその外観 写真を示す.図4の触覚デバイスを,透明なアクリル 板の上部に接着している.ロードセルをアクリル板の 土台に固定し,SMAワイヤの中央部と紐でつなぐ.こ の紐を介してSMAワイヤに張力を作用させる設計と なっており,これによりSMAワイヤの抵抗値が変化 する.この際の張力は,ロードセルによって測定する. 図7に,定電流パルスの発生とSMAワイヤ両端 電圧の取得を行う回路図を示す.定電流回路を構成し ており,パルス電流の電流値,周波数,デューティ比 を,電源装置(B&K PRESICION,1550)とファン クションジェネレータ(YOKOGAWA,FG-110)に よって設定する.SMAワイヤの両端電圧とロードセ ルの出力電圧の二つのアナログ信号を,オシロスコーできる.パルスON時のみの電圧値を得るため,一 定しきい値以下の電圧値を除去し,100点の移動平均 フィルタを用いて平滑化した.SMAワイヤの抵抗値
RSMAは,測定したSMAワイヤの両端電圧VSMA,
SMAワイヤに直列に接続された抵抗R0とその両端 電圧VRを用いて次に示す式(1)より計算によって求 めた. Rsma=R0× Vsma VR (1) 4. 2 実 験 方 法 作製した触覚デバイスの張力応答特性を検証するた め,三つの実験を行った.実験条件として,表1に各 図 7 回 路 図 表 1 実 験 条 件 条件下で,紐に4秒間で3回張力を与え,応力に対す るSMAワイヤの抵抗値の時間応答を記録した. 4. 2. 2 実験II 張力–抵抗値特性測定 次に,表1の実験IIの各条件a∼hについて,4秒 間で3回張力を与えることでワイヤに対して負荷と除 荷を行い,張力–抵抗値特性を調べた.この際,SMA ワイヤへの負荷を与えたのちに除荷を行ったため,そ の過程を区別するためのデータ処理を行った.ロード セルの出力電圧–時間のデータから,張力の増加して いる時間,減少している時間をそれぞれ取得し,負荷 過程と除荷過程として区別した. 4. 2. 3 実験III 外力応答特性測定 最後に,表1に示す実験IIIの条件a∼dについて, SMAワイヤの非振動状態でのセンシング特性並びに, 与える張力の入力周期に対するセンシング特性を検証 する実験を行った.紐に張力を与え,触覚センサの非 振動状態及び振動状態での応力–抵抗値特性を検証し, また時間応答特性も調べた.
5.
実 験 結 果
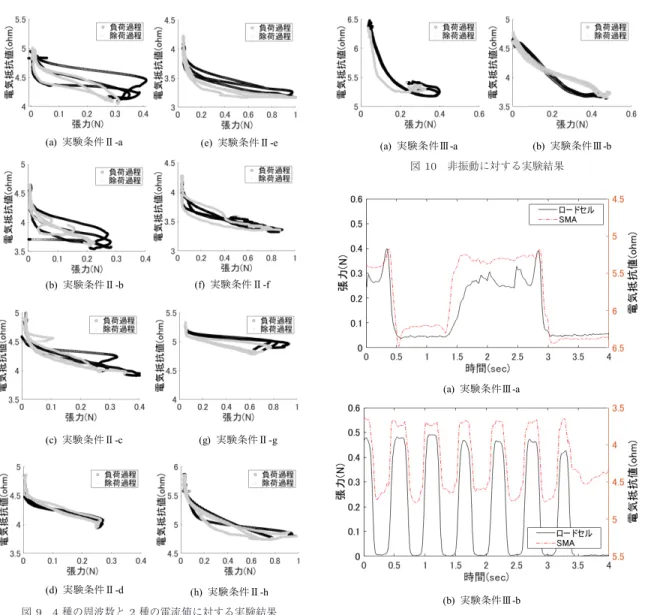
5. 1 実験I 外力による抵抗値変化の時間応答 図8に外力によるSMA抵抗値変化の実験結果を 示す.グラフの横軸に時間,左縦軸に応力,右縦軸に SMAの抵抗値を取り,計測データをプロットしてい る.図8より,3回の張力付加に対応して,抵抗値が 3回変化しており,負荷及び除荷に対するセンシング 図 8 SMAワイヤの外力–抵抗値応答図 9 4種の周波数と 2 種の電流値に対する実験結果 が行われていることを確認できた.また,張力の増加 し始めた時刻と抵抗値変化が始まった時刻も同期して おり,センサの時間応答性が高いことがわかる. 5. 2 実験II 張力–抵抗値特性測定 図9に,張力–抵抗値特性測定実験の結果を示す.グ ラフの横軸に応力,縦軸に抵抗値(0.5Ω/目盛)を取 り,負荷と除荷の過程の変化をプロットした.条件a∼ dの結果が0.4Nほどの力に対して変化があり,条件 e∼hの結果では1.0Nほどの応力に対して変化がある ことから,電流量によって測定に適した応力があるこ とがわかる.また,電流値とその周波数によらず,張 力の増加に伴う抵抗値の降下が確認でき,その範囲は 図 10 非振動に対する実験結果 図 11 非振動時の応力–抵抗値変化の結果 1.5Ω程度であった.次に,条件a,bは負荷及び除荷 過程での抵抗値減少曲線の繰り返し再現性が低かった. 細かく見ると,条件a,bはいずれも張力0.1Nの変 化において,負荷過程で0.4Ω,除荷過程で0.2Ωほど のばらつきがあった.一方,条件c∼hは比較的安定 した繰り返し再現性が得られている.つまり,高い周 波数の方が繰り返し再現性の高い計測が可能であると いえる.また,負荷/除荷過程によって抵抗値変化に ヒステリシスがあることがわかった.条件d,hでは 負荷/除荷過程でのヒステリシスは見られず,高周波 で安定することがわかる.一方で,その他の条件では, 負荷過程において除荷過程よりもおおむね高い抵抗値
図 12 100Hz振動時の応力–抵抗値変化の結果 をとなっており,特に条件e,f,gと電流値の大きな 方が負荷と除荷の過程での抵抗値変化の違いが大きく なる傾向があった. 5. 3 実験III 外力応答特性測定 図10に外力応答特性測定実験の結果を示す.図9 と同様に条件a,bの結果をプロットした.共に,負 荷/除荷過程での大きなヒステリシスはなく,いずれも 再現性が高く,安定して計測できていることがわかる. また,条件a∼dの外力と抵抗値の時間応答特性を, 図8と同様に図11,12に示す.条件dでは,除荷後 も抵抗値が戻り切らず,応答が間に合っていないこと がわかる.
6.
考
察
SMAワイヤアクチュエータは,定電流パルスの周 波数を変えると,提示される触覚感覚が変わる.提案 した触覚センサが,様々な駆動電流の周波数において 応力を計測できることから,多様な触覚感覚を提示し ながら同時に応力計測ができることがわかった. 条件II c,d,g,hでは抵抗値変化が安定している が,これは高い周波数を入力することによって,R相 周波電流ではパルスONの時間が長くなり,その間 に多くの電流が流れる.そのため,よりワイヤの加熱 時間が長くなり,オーステナイト相へ変態後,超弾性 現象が起きてマルテンサイト相が誘起されると考えら れる.SMAワイヤの長さに起因する抵抗値変化の影 響も大きくなり,相変態に起因する抵抗率変化を含む SMAワイヤ全体の抵抗値変化が不安定になったと考 えられる.一方,電流値の違いについては,電流値が 大きくなると電流ON時の温度が高くなるため,逆マ ルテンサイト変態が起きると考えられる.負荷が与え られると超弾性現象が起き,負荷に応じて相変態が起 きる.電流値が小さく,逆マルテンサイト変態が起き にくい場合,変形マルテンサイト相と応力誘起マルテ ンサイト相の間の相変態を繰り返す.結晶状態の変化 が少なく,長さ方向への変位量が小さいため,抵抗値 の変化が安定したと考えられる.超弾性現象における, オーステナイト相と応力誘起マルテンサイト相での負 荷/除荷過程には,ヒステリシスが存在することが知 られている.実験IIの条件a,e,f,gのように,電 流量の大きい方がR相を超えて応力誘起マルテンサイ ト相へ変態する量が多いため,ヒステリシスが顕著に 表出したといえる.周波数や電流値の変化に伴う抵抗 値変化の特性を補正関数として与えることで,提示す る触覚感覚を変化するために電流値を変えても,応力 計測が可能となると考える. 実験IIIより,定電流入力時の非振動状態であって も,短いSMAワイヤ片によって外力を計測できるこ とがわかった.触覚非提示時にも微弱電流を定常的に 流すことで,本デバイスでの接触力のセンシングがで きる.SMAワイヤの非振動時と振動時の基礎的な実 験結果からは,センシングの時間応答特性に違いは見 られなかった.条件III-dより,振動状態において,周 期が短いと除荷しても抵抗値が戻りきらない現象が見 られた.しかしながら,抵抗値変化は観測されたため, 触覚提示の有無にかかわらず同一の検出方法で触覚セ ンシングが可能である.SMAワイヤのセンシングの 周波数応答性については,更に条件を変えながら研究 を進める必要がある.7.
む す び
本論文では,SMAワイヤを用いた触覚提示デバイ スを,触覚センサとして利用することを提案した.単 一素子で触覚の提示とセンシングが同時にできるデバ イスを設計し,張力測定実験を行った.SMAワイヤ アクチュエータは,定電流パルスの周波数を変えるこ とによって提示する触覚感覚を変えられる.外力測定 の実験結果から,定電流パルスの周波数を変化させて も周波数に応じた補正を行うことで,接触力を測定で きることがわかった.今後,様々な物体や素材の表面 を本デバイスでなぞることで触覚感覚のセンシングを おこない,センサの特性を明らかにしていく. また,超弾性現象に見られるヒステリシスがセンサ の出力信号からも得られ,更にR相変態を利用するこ とによって,高い応答性で計測できることがわかった. 抵抗値変化の要因には,ワイヤの長さや温度による変 化,超弾性特性などの相変態による変化がある.これ らが同時に影響を及ぼす状態では,計測が非線形とな り解釈が困難となるが,簡易な接触力測定は可能であ る.抵抗値変化の要因を限定し,モデル化することで, 高精度なセンシング手法の確立を行っていく. 謝辞 本研究はJSPS科研費,新学術領域研究「ソ フトロボット学」JP18H05465及びJP18H05473,並 びに早稲田大学特定課題研究助成費(課題番号: 2018B-177,2018K-253)の助成を受けたものです. 文 献[1] S. Inoue, K. Kobayashi, Y. Furuyama, S. Kumagai, K. Hasegawa, and H. Shinoda, “HORN: Stationary airborne ultrasound 3d haptic image,” Asia Haptics 2014, pp.18–20, Tsukuba, Japan, Nov. 2014.
[2] 山本晃生,石井利樹,飛弾信崇, 口俊郎,“静電気力によ る摩擦力制御とフィルム移動子を用いた薄型皮膚感覚ディ スプレイ,”日本バーチャルリアリティ学会第 7 回大会論 文集,vol.7, pp.157–160, Sept. 2002. [3] ヤェムヴィボル,岡崎龍太,梶本裕之,“DC モータを用 いた振動提示,”日本バーチャルリアリティ学会論文誌, vol.21, no.4, pp.555–564, 2016.
[4] S. Yoshimoto, Y. Kuroda, M. Imura, O. Oshiro, and K. Sato, “Electrically multiplexed tactile inter-face: fusion of smart tactile sensor and display,” 2013 World Haptics Conference (WHC), pp.151–156, Dae-jeon, South Korea, April 2013.
[5] 朴 政用,小森谷清,金子 真,大野武房,谷江和雄,“光
導波板を用いた分布型触覚センサ,”日本ロボット学会誌,
vol.5, no.4, pp.283–290, Aug. 1987.
[6] 竹中 慎,平見健一,高嶋一登,“圧電ポリマーを用いた
薄板型触覚センサの検討,”日本ロボット学会誌,vol.32,
no.10, pp.903–913, Dec. 2014.
[7] K. Fukuyama, N. Takahashi, F. Zhao, and H. Sawada, “Tactile display using the vibration of SMA wires and the evaluation of perceived sensations,” 2009 2nd Conference on Human System Interactions, pp.685–690, Catania, Italy, May 2009.
[8] 水上陽介,内田啓治,澤田秀之,“糸状形状記憶合金の振
動を利用した高次知覚生起による触覚呈示,”情処学論,
vol.48, no.12, pp.3739–3749, Dec. 2007.
[9] 水上陽介,澤田秀之,“形状記憶合金糸を用いた触覚ディ
スプレイと微小振動の発生確率密度制御による触覚感覚 の呈示,”情処学論,vol.49, no.12, pp.3890–3898, Dec. 2008.
[10] D.J.S. Ruth and K. Dhanalakshmi, “Shape memory alloy wire for force sensing,” IEEE Sensors Journal, vol.17, no.4, pp.967–975, Feb. 2017.
[11] 本間敏夫,“形状記憶合金の応用 (全般),”日本金属学会会
報,vol.24, no.1, pp.20–25, Jan. 1985.
[12] S. Miyazaki, Y. Ohmi, K. Otsuka, and Y. Suzuki, “Characteristics of deformation and transformation pseudo elasticity in Ti-Ni alloys,” J. Phys. Collo-quies, vol.43, no.C4, pp.255–260, Jan. 1982.
(2019 年 1 月 11 日受付,8 月 14 日公開) 宮戸田顕音 (学生員) 2018年早稲田大先進理工学部応用物理 学科卒業.現在,早稲田大学大学院修士課 程在学中.ヒューマンインタフェース・触 覚デバイスの研究に従事. 重宗 宏毅 2014年早稲田大学先進理工学部応用物 理学科卒業.2016 年同大学院博士前期課程 修了.2018 年早稲田大学大学院創造理工学 研究科総合機械工学専攻博士後期課程早期 修了.日本学術振興会特別研究員(DC1), 早稲田大学助教を経て,現在,早稲田大学 理工学術院講師(任期付).計測・制御工学,折り紙ロボット, アクチュエータ,静電気工学の研究に従事.工学博士.日本機 械学会,IEEE 各会員.
インタラクション,ヒューマンインタフェースに関する研究に 従事. 澤田 秀之 (正員) 1990年早稲田大学理工学部応用物理学 科卒業 1992 年同大学院博士前期課程修了. 1998年同大学院博士後期課程修了.日本 学術振興会特別研究員,早稲田大学助手, 香川大学准教授,教授を経て,現在,早稲 田大学理工学術院教授.計測制御工学,ロ ボティクス,信号処理,ヒューマンインタフェースの研究に従 事.工学博士.電子情報通信学会,情報処理学会,電気学会, 計測自動制御学会,日本機械学会,IEEE 各会員.