平成
18 年度
修士論文
一脚ロボットによる跳躍及び走行の研究
A Study on the Running and Jumping by a One-leg Robot
指導教員 井上 喜雄 教授
副指導教員 芝田 京子 講師
高知工科大学大学院工学研究科
基盤工学専攻博士課程
(前期)
−目次−
第 1 章 緒言 ...3 1.1 本研究の背景 ...3 1.2 これまでの研究 ...4 1.3 本研究の目的 ...4 第 2 章 人間の走行について...5 2.1 走行と歩行の違い...5 2.2 人間の走行速度について ...6 第 3 章 一脚ロボットによる跳躍実験 ...7 3.1 CAD モデルによる跳躍シミュレーション ...7 3.1.1 シミュレーション環境 ...7 3.1.2 CAD モデル ...7 3.1.3 シミュレーション設定...9 3.1.4 シミュレーション条件...10 3.1.5 跳躍シミュレーション結果... 11 3.1.6 考察 ...12 3.2 一脚ロボットによる跳躍実験 ...12 3.2.1 一脚ロボットについて ...12 3.2.2 跳躍実験 1 ...13 3.2.3 実験1結果及び考察 ...14 3.2.4 跳躍実験 2 ...15 3.2.5 実験 2 結果及び考察 ...15 3.2.6 一脚ロボットとシミュレーションの比較 ...16 3.2.7 結果及び考察 ...16 第 4 章 走行解析モデルによるシミュレーション...18 4.1 衝突による速度損失の評価法 ...18 4.2 解析手法および解析モデル 1...20 4.3 関節型足による衝突シミュレーション(足首自由) ...22 4.3.1 条件 ...22 4.3.2 結果及び考察...22 4.4 関節型足による走行シミュレーション...25 4.4.1 条件 ...25 4.4.2 結果及び考察...25 4.5 関節型足による衝突シミュレーション(足首固定) ...27 4.5.1 条件 ...27 4.5.2 結果及び考察...27 4.6 曲面型足による衝突シミュレーション...30 4.6.1 解析モデル 2...30 4.6.2 条件 ...31 4.6.3 結果及び考察...314.7 曲面型足による走行シミュレーション...34 4.7.1 条件 ...34 4.7.2 結果及び考察...34 4.8 バネによる初速を有した走行シミュレーション ...35 4.8.1 条件 ...36 4.8.2 結果及び考察...36 第 5 章 結言 ...38 謝辞...39 参考文献...40 付録 A...41 A-1 部品選定 ...41 モータの選定...41 モータの計算...41 A-2 一脚ロボットの設計 ...44 軸の強度計算...44 CAD によるモデリング及び図面作成 ...46 A-3 一脚ロボットの製作 ...48 組み立て...48 付録 B ...49 付録 C...50
第 1 章 緒言
1.1 本研究の背景
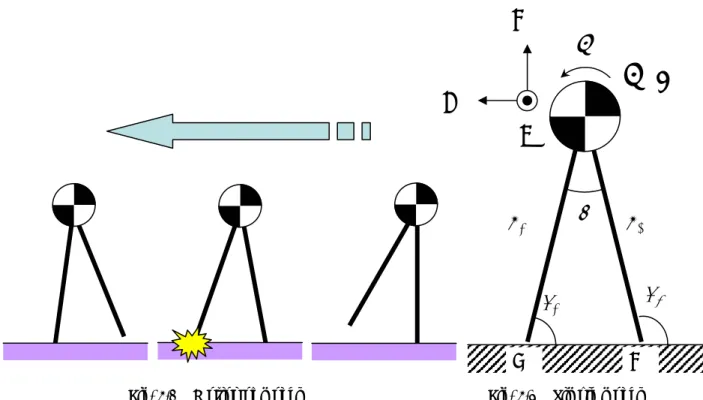
近年,ロボットに関する研究が盛んになり,特にその運動性についてはこれまで様々な機関で 研究が行われ,走行や跳躍が可能なロボットもいくつか発表されている.走行や跳躍ロボットの 古くは 1980 年代半ばから研究が始まり,米国で Raibert ら1)によって一脚ロボットや二脚ロボッ トによって開発が進められてきた.Raibert らのロボットは走行や跳躍だけでなく宙返りなどのア クロバティックな動きまで実現されているが,そのほとんどはホッピング遊具のように脚内部に 大きなスプリングを組込み,走行や跳躍を比較的容易に実現できる非人間型の走行専用のロボッ トになっていた.つまり跳躍に特化した制御法とロボット機構であった. 一方,1996 年に人間型ロボット P22)が発表されて以来,日本をはじめとする全世界でヒューマ ノイドロボットの研究が活発となり,人間と同じ環境下で活動するために数多くの研究がされ, その移動速度と踏破性が課題のひとつとなっている. そして現在,ヒューマノイドロボットの走行が実現され,その中でも2003 年 12 月に小型ヒュ ーマノイドロボットであるQRIO3)はヒューマノイドロボットとして世界初の走行を実現し,その 後,中型ヒューマノイドロボットの ASIMO4)が2004 年 12 月に 3[km/h]での走行を実現,さらに 2005 年 12 月に走行速度が 6[km/h]の走行を実現したのは記憶に新しい.なお,走行とは脚移動ロ ボットにおいては移動時に地面と非接触状態があることと定義されているものが多い.ヒューマ ノイドロボットでいえば両脚が地面から離れた状態で移動することである.また一般的に矢状平 面における地面に対して水平方向の並進速度を走行速度と定義されている. 前述したように走行事例はいくつかあるが,それらは両脚が同時に地面から浮いている状態が 僅かに存在するだけで,歩幅が小さい,つまり人間の走行のように両脚が地面から離れている間 に大きな歩幅で進むというダイナミックな動きは実現されていない.これは図 1.1 に示すように 足首関節をあまり動かさず,走行に活用してないためだと考えられる.前進するためのエネルギ 源として足首関節が大きな役割を持つという研究 5)からも足首関節の重要性がわかる.そして人 間は前述したヒューマノイドロボットよりも遥かに速く走ることができるため,更なる走行速度 の向上が求められる.1.2 これまでの研究
歩幅が大きい高速な走行を実現させるためには,ロボットの質量を跳躍させる必要があり,そ のためには,駆動源に十分余裕があることが望ましい.しかし ASIMO のような三次元の二脚ロ ボットは複雑でロボットの質量が重いため,本研究グループでは走行のなかの跳躍に着目し,構 造が単純で質量が軽い一脚ロボットによる跳躍について検討を行うこととした.研究計画として, まず二次元で静止状態から一脚ロボットにて足首の制御のみでも跳躍が可能か検討を行い,次に 一脚に補助装置をつけて着地も考慮した跳躍を検討し,二次元,三次元の二脚ロボットの走行へ 発展させていくことを考えた.そして図1.2 に示すように簡略化した片足(一脚ロボット)による前 方への跳躍の研究を行い 6),この研究から跳躍が斜方投射の運動として考えられること,つまり 足が地面から離れるまでに如何に加速して,速度を持たせるかが重要ということを明らかにした. また足指関節を設けることにより高い位置での爪先立ちが可能となり,足底を曲面にすることに よって,さらにこの効果が大きくなり,前方への跳躍には有用であることが得られた.Fig.1.2 Motion of jumping 1 (left) and jumping 2 (right)
1.3 本研究の目的
本研究では前方への跳躍の研究を基に,一脚ロボットを製作して跳躍させることを目的とする. また走行が跳躍と着地の繰り返しという事に着目し,着地から跳躍をする間に走行速度を向上さ せる要素があると考え,剛体マルチボディダイナミクスを用いた数値シミュレーションにおいて, 一脚ロボットに支持脚を追加し,走行時の着地から跳躍までの挙動を解析して,走行速度の向上 の指針を得ることを目的とする.なお,一般にヒューマノイドロボットの制御には ZMP(Zero Moment Point)を指標とした安定な制御が用いられているが,本研究ではあえてバランスを崩すこ とで重力による落下を利用し,走行方向へ加速し跳躍をさせることで走行速度の向上を目指す.第 2 章 人間の走行について
この章では歩行と走行の違いや速度について述べる.2.1 走行と歩行の違い
走行と歩行の違いについて説明する前に,走行と歩行がどういう動作なのかについて述べる. 歩行と走行は周期的に同じような動作を繰り返す移動動作である.図 2.1 に歩行および走行の半 周期の動作を示す.半周期とは片足が地面から接地した時点からもう一方の足が地面に接地する ことであり,一周期は,片足が地面に接地した時点から,再び同じ足が接地するまでのことを意 味する.左右の脚は逆位相の運動をするので,一周期で左右合わせて二歩前進することになる. 図 2.2 に走行の一周期を示す.一般的に一歩を進む距離をストライド,単位時間内の歩数をピッ チと呼ばれている. 歩行とは,身体は常に片脚ないしは両脚が地面に接している状態(接地期)の移動動作である. 走行は,片脚で身体を支えている状態(接地期)と,両脚が宙に浮いている状態(空中期)の移 動動作で,一般的に接地期において地面に接地している脚は支持脚,そのとき進行方向に振り出 される脚は遊脚と呼ばれる. 陸上競技の一種目である競歩は歩行速度を競う競技であり,その定義において走行と歩行は明 確に区別されている. 1. 常にどちらかの足が地面に着いていること.(loss of contact にならない) 2. 前脚が接地から垂直の位置まで,まっすぐで膝が曲がらないこと.(bent knee にならない) 上記の二点を満たすことで競歩は歩行とみなされる.逆にこの二点を満たさない移動動作は走行 と定義される.Fig. 2.1 Walking (left) and running (right) (half cycle)7)
2.2 人間の走行速度について
人間の成人において,移動速度が 2.0∼2.5[m/s](7.2∼9.0[km/h])を超えると歩行から走行へと 切り替わるとされており,これはエネルギ消費効率の観点からも裏付けられている 9).走行の最 高速度に関しては,陸上競技の短距離走においてカール・ルイス選手は 1991 年の世界陸上選手 権・東京大会で,100 メートル走で当時の世界記録となる 9 秒 86 というタイムを出している.こ のときの最高速度は 12.05[m/s](43.38[km/h]) にも達しているが,これは瞬間的な値であり,この 速度を維持することは難しく,図 2.3 からもわかるように人間の速度の限界といえる.また,周 期的な走行という観点では,2007 年 2 月の段階で,2003 年のベルリンマラソン(男子)にてポ ール・テルガト選手が世界最高記録の 2 時間 04 分 54 秒というタイムを出している.このとき の平均速度は約 5.63[m/s](20.27[km/h])になる.よって,人間の走行速度の範囲はおよそ 2.0∼ 12[m/s] であり,周期走行の平均速度は,走行距離やエネルギ消費を無視すると 6.0[m/s]くらいが 目安となると考えられる. 以上より走行速度を向上させるにあたって2 つの方向性があることがわかる. ・短距離走のような「瞬発的な走行」における走行速度(最高速度)の追求 ・長距離走のような「定速な周期走行」における走行速度の追求 本研究では「定速な周期走行」における走行速度,つまり平均速度の向上を目指す.第 3 章 一脚ロボットによる跳躍実験
これまでの研究ではシミュレーションにて一脚ロボットの簡易モデルの跳躍には成功している. この章ではそのシミュレーションの結果を基に,詳細(CAD)モデルの跳躍シミュレーションと 製作した一脚ロボットの跳躍実験について比較を行う. (一脚ロボットの設計・製作については付録 A を参照)3.1 CAD モデルによる跳躍シミュレーション
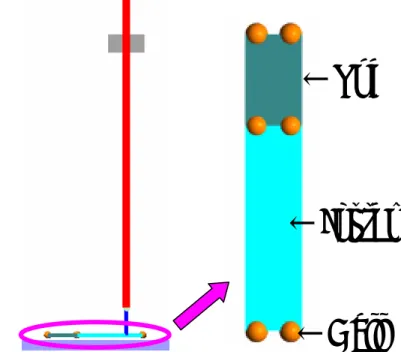
製作時に作成した一脚ロボットのモデルが跳躍可能かシミュレーションを行った. 3.1.1 シミュレーション環境 シミュレーションの環境として,MSC.visualNastran 4D 2003(以下,vN4D)と MATLAB6.5 の Simulink5.0 を使用した.vN4D は,剛体マルチボディシステムの動力学を用いた解析と Nastran の構造解析の一部を合わせたシミュレーションソフトである.Simulink は制御シミュレーション が行えるソフトで,vN4D のモデルのブロックも用意されており,図 3.1 に示すように Simulink 内で制御則を作り,vN4D で作ったモデルをブロックとして挿入して制御することができる.さ らにS-Function のブロックを用いることにより C 言語で入力と出力の関係をプログラミングする ことができる.これによって制御と剛体マルチボディシステムの動力学を用いたシミュレーショ ンが可能である.Fig. 3.1 Simulink model 3.1.2 CAD モデル Pro/ENGINEER で一脚ロボットのモデル作成し,外寸法,質量はそれぞれ図 3.2 と表 3.1 に示 す.モデルの各質量はアルミニウムの密度をPro/E で入力し,Pro/E から vN4D にモデルを出力す ることにより,vN4D でもその質量のままシミュレーションが行える. 3 リンク機構で Y 軸方向 回りに回転し,足首関節と膝関節にはトルクを発生させるものがあるとした.なお,跳躍に関連 の少ないねじれやY 方向である左右方向は考えないものとして二次元でシミュレーションを行っ た. なお,各関節における正と負は図 3.3 に示すようにし,直立姿勢における各関節を 0[deg]と 定義した.各関節の駆動範囲は下記のように定めた. 足首関節:駆動範囲 -90∼90[deg] 膝関節:駆動範囲 -180∼180[deg]
Fig. 3.2 CAD model
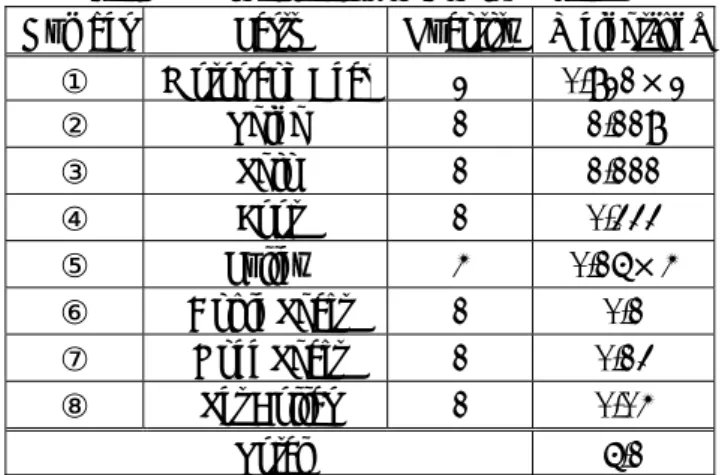
Table 3.1 Specification of CAD Model
Number Parts Quantity Weight[kg] ① Motor and Gear 2 0.811×2
② Thigh 1 1.02 ③ Shin 1 1.063 ④ Foot 1 0.207 ⑤ Pulley 4 0.138×4 ⑥ Ankle Shaft 1 0.103 ⑦ Knee Shaft 1 0.1329 ⑧ Set Collar 1 0.037 TOTAL 4.74
Fig. 3.3 Joint of plus and minus
0.36[m]
0.39[m]
0.08[m]
0.05[m]
0.185 [m]
Knee Joint
Ankle Joint
X
Z
Y
X
Z
Y
①
①
②
③
④
⑤
⑤
⑦
⑧
⑥
+ −
+ −
3.1.3 シミュレーション設定
vN4D の各シミュレーションパラメータを以下に示す.
Fig. 3.4 Gravity Fig. 3.5 Permitted value
図3.4 のように重力加速度は 9.81[m/s2]としてシミュレーションを行った.
許容値は図3.5 のように設定した.
Fig. 3.6 Integration time
積分時間は精度などを考慮して,固定ステップで0.0001[s]と定めた.積分法は Kutta-Merson 法
を用いて行った.(図3.6)簡単に Euler 法と Kutta-Merson 法について述べる.
・Euler 法:単純かつ最も短時間で行えるが,その分精度は低くなる積分法である. ・Kutta-Merson 法:正確な解を早く求めることができる積分法である.
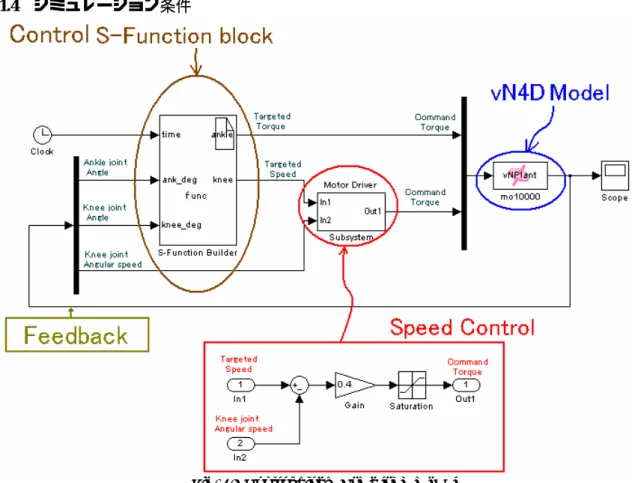
3.1.4 シミュレーション条件
Fig. 3.7 Control block (Simulink model)
図3.7 に示すように vN4D モデルから足首関節と膝関節の角度,膝関節の角速度を出力させて, フィードバックし,vN4D モデルへの入力として足首関節にトルク制御,膝関節に速度制御を行 った.モデルに入力可能な最大トルクは実験装置を考慮して15[Nm]とした. シミュレーションは開始から 0.02[s]まで直立姿勢を保ち,それから膝と足首関節を徐々に傾斜さ せ,膝関節と足首関節の角度を基にある一定の角度 γ に達すると足首関節に最大トルク 15[Nm] を与えるものとした.つまりは足首関節を中心に直立姿勢の傾斜前と傾斜後のCAD モデル上端の 成す角度である.角度 γ は順運動学 11)により 2 リンク機構の場合,次の式で求められる.図 3.8 に一脚モデルにおける角度γ を示す.膝関節の速度は試行錯誤により跳躍可能な範囲で決定した. (3-1) (3-2) (3-3)
Fig. 3.8 Definition of Gamma
)
sin(
sin
1 2 1 2 1γ
+
γ
+
γ
=
L
L
a
)
cos(
cos
1 2 1 2 1γ
+
γ
+
γ
=
L
L
b
)
(
tan
1b
a
−=
γ
b a L2 L1 γ2 γ1γ
3.1.5 跳躍シミュレーション結果
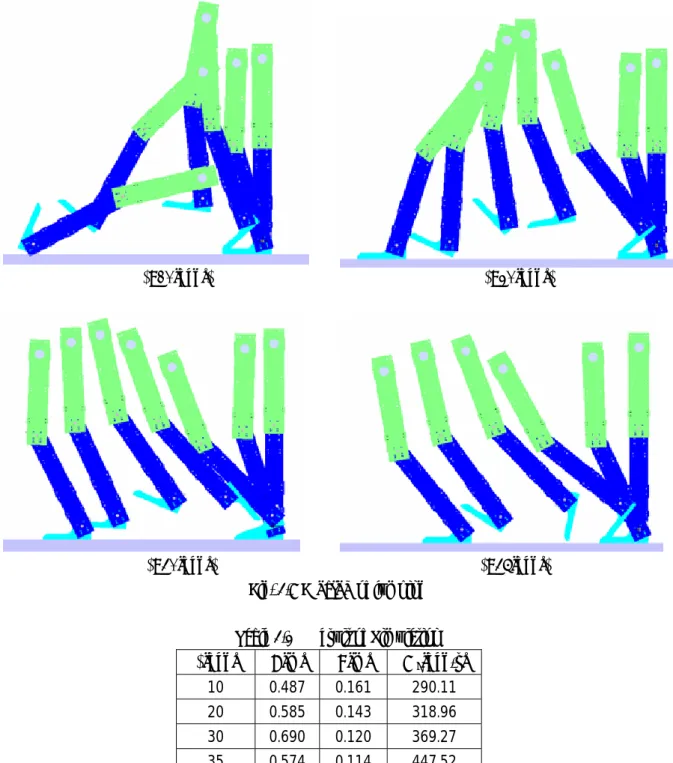
θの値が10,20,30,35[deg]の場合においてシミュレーションを行った.以下に跳躍結果を示す.
(γ=10[deg]) (γ=20[deg])
(γ=30[deg]) (γ=35[deg]) Fig. 3.9 Motion of jumping
Table 3.2 Result of Simulation
γ[deg] X[m] Z[m] Wz[deg/s] 10 0.487 0.161 290.11 20 0.585 0.143 318.96 30 0.690 0.120 369.27 35 0.574 0.114 447.52 図3.9 は γ を 10∼35[deg]の間で変化させた場合の跳躍動作である.表 3.2 はそれぞれの X 方向 とZ 方向の移動距離と跳躍させる(15[Nm]を入力している)時の足首関節の角速度 Wzである.γ=10 と20[deg]は γ の値が小さすぎたためか跳躍後に Thigh の部分が前に移動できず着地の際に後ろに 倒れて着地に失敗してしまった.なお,この場合のX の値は Z が 0 になった時の値,つまり着地 位置である.γ が 30 と 35[deg]の場合については跳躍も着地も成功した.
3.1.6 考察 着地に失敗している場合もあるが,いずれも跳躍には成功していることから,このモデルで跳 躍可能と考えられる.ただγ が大きいほうが角速度 Wzの値が大きくなる.これはγ が小さいほど 踵が浮き上がりにくい,つまり,モデルを上昇させにくいため角速度が小さくなると考えられる. なお,Y 方向の拘束を解除するといずれの場合にも Z 軸回りに回転してしまった.これはモデ ルが左右対称ではなく重心がモデルの中心からずれているからだと考えられる.
3.2 一脚ロボットによる跳躍実験
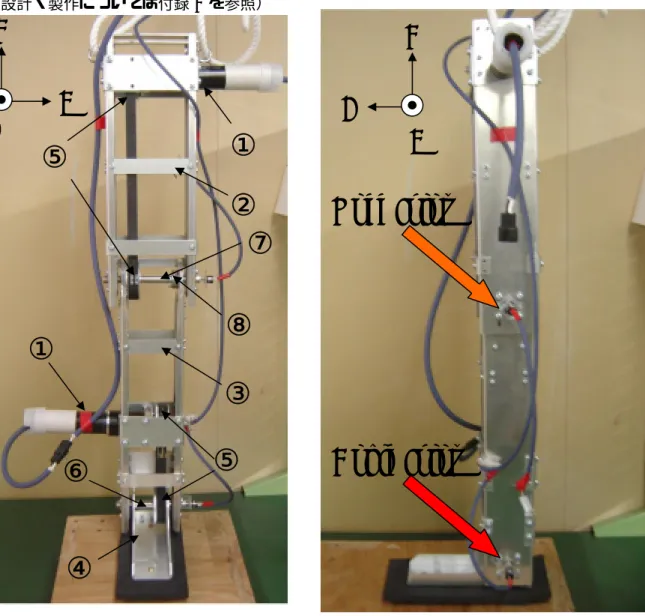
シミュレーション結果からロボットの設計に用いた角速度は300[deg/s]とγ が10[deg]の場合よ りも大きく,20[deg]の場合より小さいと考えられる.そこでγを14[deg]として跳躍実験を行った. 3.2.1 一脚ロボットについて (設計・製作については付録A を参照)Fig. 3.10 One-leg Robot
Knee Joint
Ankle Joint
①
①
②
③
④
⑤
⑤
⑦
⑧
⑥
X
Z
Y
X
Z
Y
Table 3.3 Specification of One-leg Robot
Number Parts Quantity Weight[kg] ① Motor and Gear 2 0.821×2
② Thigh 1 1.118 ③ Shin 1 1.111 ④ Foot 1 0.333 ⑤ Pulley 4 0.15×4 ⑥ Ankle Shaft 1 0.1 ⑦ Knee Shaft 1 0.13 ⑧ Set Collar 1 0.04 Total 5.1 製作を行った一脚ロボットを図3.10 に,各関節角度の正と負は図 3.11 に,外寸法,質量はそれ ぞれ表 3.3 に示す.質量はネジとナットなどにより全体で 5.1[kg]である.また衝撃対策に足底に 緩衝材を追加している.モータは公称電圧の18[V]で動作させる.電源は±40[V]で±15A[V]出力可
能な高砂製作所のBWS40-15 を使用し,制御用 PC は CPU:Pentium4 2.8[GHz],Memory:512MB AD,
DA,PIO ボード実装済みのものを用いる.制御用 OS は RedHat9 をベースとした RTLinux(カーネ
ルバージョン 2.4)でリアルタイム制御を行う.各関節の角度はポテンショメータを用いて AD ボ ードにて読み込む.なお,今回は制御器及びバッテリは積載しないで跳躍実験を行った. 3.2.2 跳躍実験 1 実験機の配線概要を図3.12 に示す.シミュレーションと同じくトルク制御を行うには電流セン サがあるモータドライバが必要であるが,今回は定電圧による跳躍実験を行った.RTLinux によ るリアルタイム制御によってポテンショメータから足首関節の角度を計測し,その角度に応じて 制御用PC から DA ボードを用いて出力電圧を電源装置に与える.電源装置は最大 18[V]をモータ に供給できるように設定し,±10[A]の電流制限も設けている.また膝関節は図 3.11 のように -25[deg]に曲げて固定して跳躍を行った.
Fig. 3.12 Control System
PC
RTLinux
AD
DA
PowerSupply
LED
M
P
PIO
+ −
Fig. 3.11 Joint of plus and minus
+ −
-30 -25 -20 -15 -10 -5 0 5 10 15 20 25 30 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 Time[s] A n gl e [d e g] 18[V] 3.2.3 実験1結果及び考察 以下に実験結果を示す.
Fig.3.13 Motion of jumping(18[V])
Fig.3.14 Ankle joint angle(18[V])
④
③
②
①
図3.13 は跳躍動作の連続写真で,図 3.14 は足首関節の角度である.足首関節の角度に注目する と実験開始時に膝を前に出すように足首を曲げており,そのまま曲げ続けて倒れこみγ が 14[deg] に達すると足首を伸ばして跳躍した.赤色の点線で挟まれたところが跳躍するために変化した角 度であるが,その角速度は242[deg/s]と設計で用いた 300[deg/s]まで達してはいなかった.なお, 跳躍高さは約0.06[m],跳躍距離は約 0.15[m]であった.これは足首のトルクがシミュレーション で用いた15[Nm]に達していないか,もしくは角速度が遅いためだと考えられる.角速度が遅い理 由としては各駆動部の摩擦や効率,または減速比が大きすぎたと考えられる. トルクが足りない場合,電流を増加させれば良い.角速度においても同様である.電圧を増加さ せれば電流が増えると考えられるため,30[V]にて跳躍実験を行った. 3.2.4 跳躍実験 2 条件は跳躍実験1と同じだが供給できる最大電圧を30[V]に変更して実験を行った. 3.2.5 実験 2 結果及び考察 以下に実験結果を示す.
Fig.3.15 Motion of jumping(30[V])
図3.15 は跳躍動作の連続写真で,図 3.16 は足首関節の角度である.実験 1 と同様に関節角度が 変化していることがわかる.緑色の点線で挟まれたところが跳躍するために変化した角度である が,その角速度は 333[deg/s]と設計で用いた 300[deg/s]まで達している.跳躍高さは約 0.10[m], 跳躍距離は約 0.4[m]であった.なお足部分のみに注目して撮影した連続写真を付録 B に示す. 30[V]の場合でも跳躍は成功したが着地時に一脚ロボットにひねりが生じている.これは着地場所 が台の端になってしまい不安定な場所に着地したからだと考えられる.またロボットの安全のた めにあるロープが着地時に大きく引っ張られている.これにより着地動作が制限されロボットが Z 軸回りに回転し,ひねりが生じたと考えられる.
④
③
②
①
⑧
⑦
⑥
⑤
-30 -25 -20 -15 -10 -5 0 5 10 15 20 25 30 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 Time[s] A n gl e [de g] 30[V]
Fig.3.16 Ankle joint angle(30[V]) 3.2.6 一脚ロボットとシミュレーションの比較
実験に使用した一脚ロボットと同様に膝関節を固定し,γが14[deg]のときの跳躍シミュレーシ
ョンを行い,跳躍高さや距離,角速度を比較する. 3.2.7 結果及び考察
-50 -40 -30 -20 -10 0 10 20 30 40 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 Time[s] A n gl e[de g] Simulation 30[V] 18[V]
Fig. 3.18 Ankle joint angle (γ=14[deg])
図3.17 にシミュレーションによる跳躍動作を示す.図 3.18 は実験とシミュレーションの足首関 節の角度変化である.初期姿勢から前傾して足首を曲げることで角度が増加し,角度γに到達後 足首を伸ばすため減少し,足が地面から離れ跳躍した.跳躍までの角度変化を比較すると,実験 機はシミュレーションとほぼ同等の動きが再現されていることがわかる.また図3.18 の赤点線枠 で囲った部分から,18[V]よりも 30[V]のほうがシミュレーションに近いことがわかる.シミュレ ーションにおいて跳躍高さは最大 0.13[m]で跳躍距離は 0.55[m]となった.この跳躍高さや距離に 関して実験と違いがある理由は,実験機には着地による衝撃を緩和するために緩衝材を追加して おり,これにより地面との摩擦力や反発力がシミュレーションとは異なるためと考えられる.し かし,跳躍までの足首関節の変化をみると実験機がシミュレーションと同等な動作をしているこ とから,シミュレーションの妥当性が検証できたといえる.
第 4 章 走行解析モデルによるシミュレーション
この章では走行の半周期の動作である着地から跳躍(着地)までの挙動を解析し,走行速度向 上の指針について検討を行った.
4.1 衝突による速度損失の評価法
Fig. 4.1 Motion of model Fig. 4.2 Simple model
歩行や走行という動作は片脚が交互接地し,移動する.このとき図4.1 のように接地の際には, 地面との衝突が起こり,エネルギや速度の損失が起こる.ここでは衝突による速度損失を評価す るための方法を示す.解析モデルを簡略化し,図 4.1 のようなコンパス型のモデルと考える.図 4.1 において衝突後の点 B では,塑性衝突であり,浮き上がりや滑りは発生しないという条件で, 衝突前後の速度変化を求める.なお,簡略化のため,重心部の質量と慣性モーメント以外の質量 は無視する.衝突時のX 方向,Z 方向における運動方程式を導出し,その期間で積分すると,そ れぞれの方向の衝突前後の運動量の変化と力積の関係を表す式が得られる.なおZ 方向ついて, 重力は衝突という短時間ではFzに比べて十分小さいとして無視する.
∫
=
−
M
x
F
dt
x
M
&
2&
1 x (4-1)∫
=
−
M
z
F
dt
z
M
&
2&
1 z (4-2) 重心の回転角度をθとし,回転方向の重心まわりのモーメントのつりあいを考えて,衝突前後の 回転速度をθ
&
1,
θ
&
2とすると∫
∫
−
−
=
−
J
L
F
dt
L
F
dt
J
θ
&
2θ
&
1 2cos
α
2 z 2sin
α
2 x (4-3)Z
X
α
2α
1L
2L
1θ
M,J
A
B
Y
β
式(4-1)と式(4-2)を式(4-3)に代入すると 2 2 1 2 2 2 1 2 1 2
θ
(
)
cos
α
(
)
sin
α
θ
J
M
z
M
z
L
M
x
M
x
L
J
&
−
&
=
−
&
−
&
−
&
−
&
(4-4)2
θ
とx
2, z
2は点B のまわりを回転するという条件によりx
&
2=
θ
&
2L
2sin
α
2,
z
&
2=
θ
&
2L
2cos
α
2 となり,式(4-4)に代入すると 1 2 2 1 2 2 1 2 2 2)
cos
sin
(
J
+
ML
θ
&
=
M
z
&
L
α
+
M
x
&
L
α
+
J
θ
&
(4-5)また
θ
1とx
1, z
1は点A のまわりを回転するという条件からx
&
1=
θ
&
1L
1sin
α
1,
z
&
1=
θ
&
1L
1cos
α
1となり, 式(4-5)に代入すると 1 1 2 2 1 1 2 2 1 2 22
)
(
cos
cos
sin
sin
)
(
J
+
ML
θ
&
=
ML
L
α
α
+
ML
L
α
α
+
J
θ
&
(4-6) 式(4-6)を変形すると 2 2 1 2 2 1 1 2cos(
)
ML
J
J
L
ML
+
+
−
=
α
α
θ
θ
&
&
(4-7)また
θ
&
1,
θ
&
2をx &
&
1, x
2に戻すと2 2 1 2 2 1 2 2 1 1 2 2 1 2 2 1 1 2
)
cos(
)
sin
sin
(
)
cos(
ML
J
J
L
ML
L
L
ML
J
J
L
ML
x
x
+
+
−
=
+
+
−
=
α
α
α
α
α
α
&
&
(4-8) 式(4-7)は衝突前と衝突後の重心の回転速度の比であり,式(4-8)は重心の X 方向の速度比である. なおL
2sinα
2とL
1sin
α
1はどちらも地面から重心までの高さと等しく,同じ値になるため約分で きる.この比が 1 に近いほど衝突による速度変化が少ない,つまりは損失が少ないといえる.なお速度比が1 になる条件は,β=0[deg]または,重心と点 A,点 B が三角形を成す限りα2=90[deg]
である.つまり,歩幅が小さいほど,あるいは,衝突後の足先と重心の成す角α2が90[deg]に近い
程,X方向の速度損失が少ないと考えられる.上述の検討は,回転速度およびX方向の速度変化
に注目した場合だが,上下方向の運動エネルギも考慮した全運動エネルギの損失がないのは,
J1 J3 J4
Mass
Thigh
Shin
Instep
Toe
Ball
Leg
Boot
φ1 φ2 φ3 J2X
Z
Y
4.2 解析手法および解析モデル 1
直交座標系(X,Y,Z)の空間において X−Y 平面を地面とし,モデルの前進を X 方向の正に,モ デルの上方を Z 方向の正とし,負に重力加速度を作用させる.この空間に図 4.3 に示すようなモ デルを作り,X−Z 平面の二次元問題として解析を行う.シミュレーションは,MSC.visualNastran 4D 2003 を使用した.なお,地面とモデルは貫通しないという条件で,地面とモデルの衝突時に 発生する力は摩擦係数と反発係数にて定義されている. 解析モデル 1 は一脚ロボット(跳躍脚)に支持脚を追加することで着地から跳躍するまでの挙動 と定常的な走行にみられる走行方向の運動エネルギの影響を考慮できるモデルとした.具体的に は跳躍脚と支持脚を股関節(J1)で接続し,人間の走行時の跳躍高さから跳躍脚を落下させることに より,支持脚の地面との接触部分を中心に回転させ,進行方向の速度と落下する速度を持たせて 跳躍脚を着地させる.着地後に足首関節(J3)にトルクを与え跳躍させ,跳躍後の進行方向の速度を 走行時の最高速度として検討する.跳躍脚を振り下ろすため,着地した際に,地面との衝突によ る水平(進行)方向の速度の損失があり,これを如何に抑えて跳躍するかが走行速度向上につながる と考えられる. モデルの大きさを表4.1 に示す.各リンクは均一の部材で質量を持つとし,股関節(J1),膝関節 (J2),足首関節(J3),足指関節(J4)と定める.J4以外にはトルクを発生させることができるとし,各 最大トルクはJ1で4[Nm],J 2とJ3は15 [Nm]とした.各関節の駆動範囲は下記のように定めた. ・足指関節(J4):0∼30[deg] ・足首関節(J3):-90∼90[deg] ・膝関節(J2): -180∼180[deg] ・股関節(J1): -180∼180[deg] なお,各関節における正と負は図4.4 に示すようにし,直立姿勢における各関節を 0[deg]と定 義して,地面との接触は6 個の球による点接触とした.(図 4.5) 足指関節については特に制御 せずに,回転のバネ・ダンパにより動作するものとし,係数は下記のように定めた. ・ばね定数:K=0.001[Nm/deg](回転復元力=-Kr r:回転角度[deg]) ・減衰定数:C=0[Nms/deg] (回転減衰力=-Cω ω:角速度[deg/s])(Side view) (Birds-eye view) Fig. 4.3 Mathematical model1
L
Supporting Leg Jumping LegX
Z
Y
J1 J3 J4 φ1 φ2 φ3 J2
+
-
+
-+
-+
-Fig. 4.4 Joint of plus and minus Fig. 4.5 Standing posture and feet bottom
Table 4.1 Specification of mathematical model
Fig. 4.6 Mathematical model1 (footless)
Parts Shape Size(x y z)[m] Weight[kg]
Mass RS 0.10 0.10 0.05 4 Thigh RS 0.01 0.05 0.40 1.5 Shin RS 0.01 0.05 0.40 1.5 Instep RS 0.18 0.05 0.01 0.7 Toe RS 0.08 0.05 0.01 0.3 Ball S R0.01 0.01×6 Leg RS 0.02 0.85 0.01 0.2×2 Boot C R0.01 H0.01 0.2×2
Coefficient of friction 0.4 Coefficient of restitution 0.1 R: radius H: height RS: rectangular solid S: sphere C: cylinder
←
Toe
←
Instep
X
Z
Y
4.3 関節型足による衝突シミュレーション(足首自由)
4.2 節の評価法を用いて跳躍脚が着地して衝突による速度損失について検討を行う. 4.3.1 条件 図 4.1 において,L1=L=0.72[m]とし,股関節(J1)の角度φ1=60[deg],膝関節(J2)の角度φ2=-50[deg] とすると地面から足首関節(J3)までの高さは 0.125[m]となる.この状態から J3 の角度φ3を 10~70[deg]の間で変化させて跳躍脚を振り下ろした場合に衝突前と後の速度を求める.なお,L2 は足首から踵までの長さがあるためφ3によって変化する.また今回はJ1のトルクを0[Nm],J2は 固定,J3は振り下ろし時には固定して着地直前に0[Nm]になるようにシミュレーションを行った. 一般に踵着地は着地時の衝撃を低減する効果を持つが,一歩の間に回転中心を徐々に前進させる という効果も持つとされている.衝撃を低減する効果を検証するためにToe,Instep,Ball(足部) を削除し図4.6 に示すようなモデルによる検討も行った. 4.3.2 結果及び考察 図4.7 から図 4.9 に各条件のシミュレーション結果の挙動の一部を示す.シミュレーションは跳 躍脚が重力によって振り下ろされ踵から着地し,足指関節,爪先の順に接地した.図4.10 は Mass のX 方向の速度変化を表しており,着地した際に急激に速度が減少したことがわかる.同じく足 指関節が接地したことも,二度目の速度減少から確認できる.そして,表4.2 に示すようにφ3が大 きくなると点A と点 B の長さ stride が長くなり,それに伴ってα2の値が90[deg]から小さく,つま りは速度損失が多くなることがわかる.なお,X 方向の速度比 Vx2/Vx1と全運動エネルギ比KE2/KE1 が1 に近いほど衝突前後の変化が少ないため,損失が少ないといえる.φ3=10[deg]は足指関節のほ うから着地したためα2が一番小さくなり速度損失が多くなったと考えられる.またφ3=20[deg]にお いても足指関節から着地し,その後,踵が接地したが,φ3=60[deg]と比べるとα2が小さいにもかか わらず,Vx2/Vx1が1に近い.これはKE2/KE1からもわかるようにエネルギ損失がφ3=20[deg]の方が 少ないためだと考えられる. エネルギ損失で比較を行うと,今回の条件では 30[deg]の場合が一番少ない.続いて 20[deg], 40[deg]の順であるが,X 方向の速度損失は 40[deg]のほうが少なく,その理由が,90[deg]にα2の値 が近いほど速度損失は少ないため,ということがわかる.(φ3=20[deg]) (φ3=30[deg]) (φ3=40[deg])
(φ3=50[deg]) (φ3=60[deg]) (φ3=70[deg])
Fig. 4.9 Result of simulation 1 Table 4.2 Ratio of the velocity and angle α2
表4.2 の一番下の行(緑色)は Toe,Instep,Ball(足部)を削除したモデルであるが,α2とstride
に注目するとφ3=40[deg]の時の値に似ており,その時の X 方向の速度比 Vx2/Vx1と全運動エネルギ
比KE2/KE1を比較するとφ3=40[deg]の方が 1 に近いため損失が少ないと評価できる.足部がないこ
とでエネルギに関しては倍近くの損失があるということがわかる.よって足部があり,踵から着 地することで着地時の衝撃を低減しているといえる.
φ
3L
2 [m] stride [m]α
2[deg]
Vx
2/Vx
1KE
2/KE
110 0.771 0.360
66.986 0.521 0.237
20 0.755 0.331
85.792 0.847 0.789
30 0.729 0.187
81.271 0.961 0.889
40 0.737 0.214
78.087 0.918 0.771
50 0.745 0.237
75.518 0.861 0.614
60 0.751 0.256
73.390 0.791 0.486
70 0.757 0.272
71.657 0.705 0.389
0.725
0.228
78.133
0.795
0.360
-0.2 0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Time[s] V e lo ci ty [m /s ] 10[deg] 20[deg] 30 [deg] 40[deg] 50[deg] 60[deg] 70[deg]
Fig.4.10 Velocity of X direction
図 4.10 において 50∼70[deg]は速度の変化が大きいことがわかる.70[deg]を例として①∼⑥の 各状態について説明する. ①踵が着地し,速度損失がおきる.また支持脚が浮く. ②損失後,いったん踵が浮き,また踵が接地する. ③踵を地面と擦る状態なので速度が減少. ④浮いていた支持脚が接地する.これで,またBoot を中心に前方に傾斜するため速度が増加.こ の間踵は浮いている. ⑤踵が再び接地.足首関節中心の回転になり,支持脚が浮く. ⑥足首関節を中心とした回転でMass 部分が足首より前に移動すると速度は増加する.
①
↓
↑
②
↑
③
↑
④
↑
⑤
↑
⑥
4.4 関節型足による走行シミュレーション
衝突シミュレーション1の結果を基に走行可能かシミュレーションを行った. 4.4.1 条件 4.3.2 節よりφ3が20[deg],30[deg],40[deg]の場合において速度損失が少ないことから,これらの 場合おいて,跳躍脚の着地後にJ3に15[Nm]のトルクを与えて走行可能か検討を行う.J1に1[Nm] のトルクを与えて支持脚の位置も制御した.なお,着地するまでは4.3.1 節と同じ条件である. 4.4.2 結果及び考察(φ3=20[deg]) (φ3=30[deg]) (φ3=40[deg])
Fig. 4.11 Motion of running 1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 Time[s] Vel o ci ty[m/s] 20[deg] 30[deg] 40[deg] Fig. 4.12 Velocity of X direction
図4.11 に走行シミュレーションの挙動の一部を示す.着地までの挙動は図 4.9 と同じであるこ とがわかる.図4.12 に示すように Mass の X 方向速度は着地後,跳躍脚で支持している間に減少 し,しばらくしてから増加する.これはJ3が着地後に回転中心となっているが,トルクが0[Nm] のため加速が行われず,脚の振り下ろしの慣性力のみで回転したためである.そしてMass の位置 が J3より前に移動すると今度は落下となり速度は増加した.この時に J3に15[Nm]を与えて跳躍 させて走行を検討したが,最高速度は1.75[m/s]までしか達しなかった.なお,平均走行速度は約 0.9[m/s]で跳躍距離は約 0.48[m]であった.走行速度の目安としてマクニール・アレクサンダーが 提案した「フルード数」というものがある.フルード数F は式(4-9)で定義され,ロボットの大き さによらず走行速度を評価できる.
重力定数
脚長
平均速度
×
=
F
(4-9) 人間の場合,F=1 未満では歩行と走行の両方が可能だが,F=1 以上では歩くことはできず走行と なる.その意味でF=1 を超えるかが走行ロボットの性能の目安となるとされている.今回の条件 では脚長が0.72[m]で平均速度は 0.9[m/s]から F=0.34 であることから F=1 以上にするには平均速度 が2.66[m/s]以上を達成する必要がある. 跳躍によって足が地面から離れる直前の速度を表4.3 に示す.φ3=30[deg]は着地による損失が一 番少ないので水平方向の速度Vx が一番大きいことがわかる.しかし,垂直方向の速度 Vz は負に なっていることから跳躍するための床反力が得られてない,つまりMass 部分が前に移動しすぎて 足が滑って落下していると考えられる.一方φ3=40[deg]のほうは Vz が正なため跳躍距離が大きく なり,支持脚着地時のMass の位置である Lx が一番大きいことがわかる.しかし平均走行速度と しては最高速度に達する(跳躍)までに時間がかかりすぎているためφ3=30[deg]のほうが速いとい うことになる.Table 4.3 Mass of velocity and distance
φ
3[deg] Vx[m/s] Vz[m/s]
Jx[m]
Jz[m]
Lx[m] Lz[m]
20 1.64 -0.439 0.834 0.742 0.895 0.716
30 1.74 -0.0469
0.832 0.76 0.974 0.708
40 1.67 0.0219 0.836 0.761 0.979 0.720
4.5 関節型足による衝突シミュレーション(足首固定)
4.4.2 節の結果から走行速度向上のためには着地から跳躍までの動作を短い時間で行う必要が あると考えられる.着地から跳躍までの挙動に注目すると,着地後に減速し,足首関節を中心に Mass 部分が回転していることがわかる.このとき足首関節が 0[Nm]なために,着地前までに得 た速度がうまく活用されてないと考えられる.人間の歩行における足首関節の仕事は蹴り出し時 を除いては制動モーメント(曲がることを妨げようとすること)であることから,足首を伸ばす方向 へトルクを与える必要がある.しかし着地時に足首を伸ばす側にトルクを与え過ぎると進行方向 と逆向きの力である制動力が大きく作用し,速度が減少することが予想され,それについての研 究12)も行われている.またこの制動力もトルクの与え方で変化するため,今回は足首関節を固定 することで制動力を一定とした場合の衝突による速度変化について検討を行う. 4.5.1 条件 図4.3 において,4.3.1 節と同じ条件で,この状態から J3の角度φ3を10~70[deg]の間で変化さ せて跳躍脚を振り下ろした場合に衝突前と後の速度を求める.なお,L2は足首から踵までの長さ があるためφ3によって変化する.また今回はJ1のトルクを0[Nm],J2は固定,J3は振り下ろし時 から固定したままシミュレーションを行った. 4.5.2 結果及び考察(φ3=20[deg]) (φ3=30[deg]) (φ3=40[deg])
(φ3=50[deg]) (φ3=60[deg]) (φ3=70[deg])
-0.2 0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Time[s] V e lo ci ty [m /s ] 10[deg] 20[deg] 30[deg] 40[deg] 50[deg] 60[deg] 70[deg]
Fig. 4.14 Velocity of X direction Table 4.4 Ratio of the velocity and angle α2
φ
3L
2 [m] stride [m]α
2[deg] Vx2
/Vx
1KE
2/KE
110
0.7710.36 66.99
0.52 0.24
20
0.7220.161 84.45 0.94 0.51
30
0.7300.192 80.70 0.89 0.46
40
0.7380.218 77.67 0.83 0.47
50
0.7450.239 75.35 0.77 0.45
60
0.7510.256 73.39 0.67 0.40
70
0.7580.272 71.68 0.63 0.37
図4.13 に各条件のシミュレーションの挙動の一部を示す.なおφ3=10[deg]の場合は図 4.7 と同じ 結果になったため省略する.これは 4.3 節での足首関節の固定を解除する条件が踵から着地する 場合のみにしたから,つまり踵から着地をしなければ足首関節は固定され続けるということであ る.4.3 節と同様にシミュレーションは跳躍脚が重力によって振り下ろされ踵から着地し,足指関 節,爪先の順に接地した.図4.14 は Mass の X 方向の速度変化を表しており,着地した際に急激 に速度が減少したことがわかる.同じく足指関節が接地したことも,二度目の速度減少から確認 できる.表4.2 と表 4.4 を比較すると足首が固定されている場合の大部分がエネルギ,速度損失において 共に大きい.しかし,図4.10 と図 4.14 を比較するとφ3=30[deg]の場合に足首関節を固定したほう が短時間で速い速度を持っている.(図の赤丸参照) これは足首を中心に速く回転したことを表し ており,一般に接地期における回転中心は図4.15 のように移動し,踵から着地が行われ踵を中心 とした回転運動が行われる7).次に足底の接地と共に足首回りに回転運動となり,ZMP が爪先ま で移行すると爪先まわりの回転となる. φ3=30[deg]の場合は図 4.16 に示すように Mass 部分と回転 中心(支点)の位置が順番に移り変わった.そして足指関節があることで回転支点がはやく前方 へ移り変わることができるということがわかる.この結果から着地後,跳躍脚で支持している間 に前方へ速く回転することで衝突による速度損失を回復し,跳躍させることにより走行速度を向 上させることができるのではないかと考えられる.
Fig. 4.15 Alteration of rotation center 7)
4.6 曲面型足による衝突シミュレーション
図4.16 のような挙動は足指関節により支点が2段階で変化するからであり,足底形状によって 着地後の挙動が変わると考えられる.そこで足底を曲面にすることにより支点が変化する回数を 増やし,さらに足首中心にころがりやすくすることで,走行速度を向上させることができるか検 討を行った. 4.6.1 解析モデル 2(Side view) (Birds-eye view) Fig. 4.17 Mathematical model 2
Fig. 4.18 Foot 解析モデル1 の関節型から足底形状を曲面にした曲面型に交換した解析モデル 2 を図 4.17 に示 す.曲面型足の質量は1[kg]で Toe と Instep 部分を合わせた重さとした.また関節型となるべく同 じ条件で比較するために図4.18 のように Ball も用いた. Support Leg Jumping Leg
X
Z
Y
X
Z
Y
J1 J3Mass
Thigh
Shin
Foot
Ball
Leg
Boot
φ1 φ2 φ3 J20.26[m]
0.01[m]
L
0.05[m]
R
4.6.2 条件 図4.17 において,Foot 以外は 4.5.1 節と同じ条件でシミュレーションを行う.なお J3の角度 φ3をこれまでの結果より 20~40[deg]の間が重要であると考え,角度φ3を変化させて跳躍脚を振り 下ろした場合に衝突前後の速度を求める.また J1のトルクを 0[Nm],J2は固定,J3は振り下ろ し時から固定である.そして,図4.18 の半径Rを0.4~10[m]の間で変化させて検討を行った. 4.6.3 結果及び考察
(R=0.4[m],φ3=20[deg]) (R=0.6[m],φ3=20[deg]) (R=0.8[m],φ3=20[deg]) (R=1[m],φ3=20[deg])
(R=0.4[m],φ3=30[deg]) (R=0.6[m],φ3=30[deg]) (R=0.8[m],φ3=30[deg]) (R=1[m],φ3=30[deg])
(R=0.4[m],φ3=40[deg]) (R=0.6[m],φ3=40[deg]) (R=0.8[m],φ3=40[deg]) (R=1[m],φ3=40[deg])
Fig. 4.20 Velocity of X direction Table 4.5 Ratio of the velocity and angle α2
R[m]
φ
3[deg] L2 [m] stride [m]
α
2[deg]
Vx
2/Vx
1KE
2/KE
10.4 20 −
−
− 0.69 0.26
0.4 30 0.730 0.191 80.78 0.87 0.41
0.4 40 0.738 0.217 77.76 0.82 0.38
0.6 20 −
−
− 0.78 0.31
0.6 30 0.730 0.192 80.62 0.88 0.43
0.6 40 0.738 0.216 77.84 0.81 0.36
0.8 20 −
−
−
0.78 0.31
0.8 30 0.730 0.192 80.70 0.88 0.43
0.8 40 0.738 0.216 77.84 0.80 0.36
1 20 −
−
−
0.81 0.31
1 30 0.730
0.189 81.03
0.93 0.79
1 40 0.737
0.214 78.09
0.86 0.62
-0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time[s] V e lo ci ty [m /s ] r0.4_20[deg] r0.4_30[deg] r0.4_40[deg] r0.6_20[deg] r0.6_30[deg] r0.6_40[deg] r0.8_20[deg] r0.8_30[deg] r0.8_40[deg] r1_20[deg] r1_30[deg] r1_40[deg]-0.2 -0.1 0 0.1 0.2 0.3 0.4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time[s] Ve lo c it y[ m / s] r0.4_40[deg] r0.6_40[deg] r0.8_40[deg] r1_40[deg]
Fig. 4.21 Velocity of Z direction (φ3=40[deg])
半径R が 2~10[m]の結果については付録 C に記す.図 4.20 より R は異なるが足首関節の角度φ3 が同じ角度の時にそれぞれ似たような傾向の速度変化をすることがわかる. φ3が40[deg]のときに 速度が速い傾向がある理由は着地時に他の条件よりFoot が傾いているため,Foot の上下する量が 多く,高い位置からころがり始めるからだと考えられる.なお,この場合には常に足首が固定さ れている必要がある.そして R=1[m]で φ3=40[deg]のときが他の φ3=40[deg]のときに比べて速度増 加が多い.これはR が他の場合に比べて大きいこと,つまりは踵で着地した場合に曲率が大きい より小さい方が Foot と地面の離れている部分の高さが高いため落下時間が長く,Mass 部分を加 速しやすいためと考えられる.図 4.21 は φ3=40[deg]のときの Z 方向の速度変化を示しており,Z 方向の急激な変化があることがわかる.これはFoot と地面の衝突を表しており,0.5[s]以降は Foot のころがりによって何度も衝突が起こり,階段のような不連続な変化をする.そして矢印は各場 合のころがりにおける一回目の衝突をした場所を表している.これにより,R が大きいほうがこ ろがりにおける衝突が遅く,またその間にMass は加速され,速度が増加すると考えられる.なお, 階段のような不連続な変化が生じる理由は曲面が vN4D 上では多角形として扱われているためで あると考えられる. 表4.5 よりφ3が30[deg]の場合がすべての R において,着地による損失が少ないということがわ かる.なお,φ3=20[deg]のときの L2,stride,α2 が「−」となっているものは踵から着地せずに足 首関節の下や,Foot の中央付近で着地したため,衝突(着地)点の位置がはっきりわからなかっ たからである.しかしながら,速度比とエネルギ比の値から衝突(着地)点が踵で着地する場合 よりも前の方にあるということが4.1 節よりわかる.
4.7 曲面型足による走行シミュレーション
衝突シミュレーション3 の結果を基に走行可能かシミュレーションを行った. 4.7.1 条件 4.6 節の結果よりRが0.4~1[m]でφ3が30[deg]と 40[deg]の場合において,跳躍脚の着地後にJ3 に 15[Nm]のトルクを与えて走行可能か検討を行う.J1にはトルクを与えず,支持脚は自由に振 れるようにした.なお,着地するまでは4.6 節と同じ条件であるが,Foot が 8[deg]以上傾いた時 に足首関節を0[Nm]とした. 4.7.2 結果及び考察(R=0.4[m],φ3=30[deg]) (R=0.6[m],φ3=30[deg]) (R=1[m],φ3=30[deg])
Fig. 4.22 Motion of running2
Fig. 4.23 Velocity of X direction
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Time[s] V e lo ci ty [m/s ] r0.4_30[deg] r0.4_40[deg] r0.6_30[deg] r0.6_40[deg] r0.8_30[deg] r0.8_40[deg] r1_30[deg] r1_40[deg]
図4.22 に走行シミュレーションの挙動の一部を示す.着地までの挙動は 4.6.3 節と同じである ことがわかる.図4.23 に示すように Mass の X 方向速度は着地後,跳躍脚で支持している間に減 少して,その後,回転支点が移動することで増加する.赤丸の部分で急激な変化が生じているの は15[Nm]のトルクが足首関節に与えられたからである.結果として最高速度は 1.75[m/s]で,平均 走行速度は約 0.9[m/s],跳躍距離は約 0.48[m]となった.最高速度に関しては関節型と同様な結果 になったが着地後から跳躍までの移動速度を比較すると関節型が 0.99[m/s]なのに対して,曲面 型は1.2[m/s]であった.このことからころがり効果が走行速度の向上に有用だといえる. 足首関節に15[m]のトルクが与えられた後の挙動について注目するとRが0.4[m]の場合は水平 方向の速度増加が他の場合に比べてあまり見られない.これは曲率が大きく,ころがりが速いた め上下動が大きく,水平方向へ加速しにくいことが考えられる.一方Rが1[m]の場合には曲率が 小さく,ころがりが遅いため跳躍するまでに時間がかかる.また付録 C よりR が2[m]以上の場 合にはころがり方にほとんど違いがないことがわかる.これは曲率が小さ過ぎて曲面にしてもこ ろがりの効果がないということがいえる.このことから,R には適度な値があると考えられ,今 回の条件において,Rが0.6[m]の場合が適しているといえる.
4.8 バネによる初速を有した走行シミュレーション
4.4 節や 4.7 節の結果から支持脚で着地後,跳躍脚で着地した場合よりも速度が増加している. これは人間でいう定常走行の状態ではなく,走り始めからの加速走行の状態であると考えられる. つまり着地によって損失するエネルギよりも跳躍によって回復するエネルギの方が大きいという ことである.これにより跳躍脚の着地後より支持脚での着地後のほうが,速度が増加している. そこで跳躍脚での着地時に更に水平方向の速度がある場合にどのような走行(跳躍)になるか,検討 を行った.(Side view) (Birds-eye view) Fig. 4.24 Mathematical model 3
X
Z
Y
X
Z
Y
Spring4.8.1 条件 モデルは着地時の挙動がわかりやすいように関節型の足の解析モデル 1 を使用し,また 4.4 節 の場合よりも跳躍脚での着地時に速度を持たせるために,図4.24 のようなバネ付きのモデルとし た.バネはある長さになると拘束が解除されて,モデルに影響を与えないようにし,バネ定数 K を 大 き く す る こ と に よ り , 着 地 す る ま で の 速 度 が 増 加 す る よ う に し た . バ ネ 定 数 K は 1000~4000[N/m]の範囲で変化させた.なお,バネ定数により着地時までの時間が変化するため, 股関節は自由ではなく固定で,また着地時の水平方向の速度損失をなるべく少なくするために股 関節(J1)の角度φ1=50[deg],膝関節(J2)の角度φ2=-60[deg],足首関節の角度(J3) φ3=40[deg]とした.足
首関節は固定し,着地直前に自由にする.その後,走行(跳躍)時に Mass の初期高さ 0.72[m]をな
るべく維持するように足首関節に15[Nm]のトルクを与え,シミュレーションを行った.
4.8.2 結果及び考察
(K=1000[N/m]) (K=2000[N/m]) (K=4000[N/m]) Fig. 4.25 Motion of running 3
0 0.5 1 1.5 2 2.5 3 3.5 4 0 0.1 0.2 0.3 0.4 0.5 0.6 Time[s] Vel o ci ty[m/s] K=1000 K=1500 K=2000 K=2500 K=3000 K=3500 K=4000
図 4.25 にシミュレーションの挙動の一部を示す.踵から着地し足首を伸ばして跳躍している のがわかる.図4.26 は Mass の X(水平)方向速度である.赤丸で囲んだ部分で着地をしている が,速度の減少があまり見られない.これは着地時にα2が90[deg]に近くなるような条件にしたか らである. バネ定数K が増加することで着地直前までのエネルギ(以下:初期エネルギとする)が大きく なり,着地直前の速度も増加するが,K=2500[N/m]あたりで跳躍時に初期高さ 0.72[m]を維持しつ つ,着地直前の速度まで到達することが困難になった.これはMass が速く移動することにより, 足首のトルクによってX(水平)方向へ加速が十分に行われず,Z(垂直)方向のみの加速となり, 結果として跳躍時に水平方向の速度が減少したと考えられる.つまり,初期エネルギが着地によ り消散し,流入させたエネルギによって初期エネルギまで回復させようとしたが,トルクが足り ずに回復できなかったということである.またバネ定数が増加することにより足首関節のストロ ークが短くなることや足首を伸ばすタイミングや速度が遅くなり,水平方向への加速が十分に行 えないことが考えられる. バネ定数K を変化させない場合で,トルクを与えるタイミングについても検討を行ったが,与 えるタイミングを早くすれば早くするほど垂直方向への速度が増加し,遅ければ遅いほど水平方 向への速度が増加することがわかった.しかし,いくら水平方向への速度が増加するとはいえ, 跳躍後のMass 位置が初期高さを下回ることは,モデルが落下しているということを示しており, 跳躍とはいえない.Mass の位置や足の接地状態により,足首のトルクによって発生させる地面と の反力が決まるが,この反力が初期高さを保つほどまで,十分にMass に作用しなかったためだと 推測される.簡単にいえば足首にトルクを与えるタイミングが遅く,モデルが滑り,前方へ転倒 したといえる. よって,流入エネルギにより運動エネルギを回復させることができる状態には範囲があると考 えられ,これによりエネルギの収支による定常走行の速度の推定が可能ではないかと考えられる. しかし,実際の走行に発展させるためにはまだまだ検討する項目があり今後の課題といえる.
第 5 章 結言
実験装置を製作し,跳躍実験を行い,シミュレーションと比較した結果及び一脚ロボットに支 持脚を追加し,シミュレーションで走行について検討した結果から,以下のような結論を得た. 1) 一脚ロボットの跳躍実験からシミュレーションと同じような制御で跳躍可能で,跳躍高さに関 しても摩擦などを考慮すると妥当ではないかと考えられる.またシミュレーションの妥当性も検 証できた. 2)跳躍実験の今回の条件では少なくとも跳躍高さ 0.1[m],跳躍距離 0.3[m]を達成した. 3)衝突前後の速度比が 1 に近いほど,衝突による速度損失は少なくなり,衝突後の足先と重心の 成す角α2を90deg に近づければ X 方向の損失は抑えられる.ただし,Z 方向を含む全運動エネル ギに関してはβが0[deg]の方が損失は少ない. 4)今回の条件では最高速度は 1.75[m/s],平均速度は 0.9[m/s]と遅いため人間の高速の定常的な走行 は表現できてない.しかし,支持脚を追加することにより一脚ロボットの跳躍を走行へ実現する ことができた. 5)足底の曲面によるころがり効果が走行速度の向上に有用である.その場合,曲率が大きいほう が次の点までの高さが高いので速くころがるが,大きすぎると水平方向への加速が行われないた め適度な曲率にする必要がある. 6)エネルギ収支から定常的な走行速度を推定する可能性が得られた. 今後の課題としては 4.8 節の結果からエネルギの消散と流入による走行速度の推定,実験機にお ける着地時の強度問題,一脚と支持脚から二脚への発展が挙げられる.謝辞
本研究を進めるにあたり,終始懇切なる御指導賜りました指導教員である高知工科大学井上喜 雄教授に謹んで深甚の感謝の意を表すと共に厚く御礼申し上げます.また,副指導教員である高 知工科大学芝田京子講師には,日頃より暖かい激励と御厚情,研究に対する貴重なご意見などを 賜りまして厚く御礼申し上げます. 本研究の推進にあたり,一脚ロボットのフレーム製作を快く引き受けていただいき,貴重なご 意見を賜りました,ヤマト商工有限会社 中西一郎氏,ならびに製作所の皆様には深く感謝の意 を表します. 高知工科大学知能機械力学研究室メンバである中浜昌文氏ならびに今西望氏には,共同研究者 として一脚ロボット製作ならびに,実験装置設計について等の技術的なアドバイス,貴重なご意 見を頂きました.また,私と同じく修士二年の谷岡一氏,道明敬史氏,松下準氏,眞鍋直樹氏, 迎和幸氏には公私共にお世話になりました.東北大学量子エネルギー工学専攻の佐竹正哲氏なら びに北海道大学機械宇宙工学専攻の中村篤人氏には走行の研究に関する資料を提供していただき, 他分野からの研究に対するご意見,ご協力等を賜わりました.ここに深く感謝を申し上げます. そして,研究をご支援下さった皆さんに多大なご協力を賜りました.この場を借りて厚く御礼 申し上げます. 最後に,心身ともに支えてくれた家族と友人ならびに理解を示してくれた親族に心より感謝を 申し上げます.ありがとうございました.参考文献
1) MIT,「MIT Leg Laboratory」 参照日付:2007/02/08 (http://www.ai.mit.edu/projects/leglab/robots/robots.html) 2) HONDA,「P2」 参照日付:2007/02/08 (http://www.honda.co.jp/ASIMO/technology/history/index.html) 3) SONY,「QRIO」 参照日付:2007/02/08 (http://www.sony.co.jp/SonyInfo/QRIO/top_nf.html) 4) HONDA,「ASIMO」 参照日付:2007/02/08 (http://www.honda.co.jp/ASIMO/)
5) Tom F.Novacheck:“The biomechanics of running”,Gait and Posture 7,pp.77‐95,1998 6) 森 崇,中浜昌文,井上喜雄,芝田京子:“一脚ロボットの跳躍現象に関する研究”, 日本AEM学会誌,Vol.14,No.1,pp.39-44,2006
7) 社団法人 日本機械学会編:“生物型システムのダイナミックスと制御”,養賢堂 8) 小林寛道,山下文治:“走る科学”,大修館出版
9) T.A.McMahon:“Mechanics of Locomotion”,
International Journal of Robotics Research,Vol.3,No.2,pp.4-28,1984 10) 金子公宥:“スポーツ・バイオメカニクス入門”,杏林書院 11) 小川廣一,加藤了三:“初めて学ぶ基礎ロボット工学”,東京電機大学出版局, pp.122-134,1998 12) 井指雅彦,和田充雄,井上純一助,石村康生:“人の走行速度向上のためのバイオ メカニカルシミュレーション”, 北海道大学大学院,平成
16
年度修士研究論文
付録 A
A-1 部品選定
これまでの研究のシミュレーション結果から一脚ロボットの主な仕様として以下のように定めた. ・3 リンク機構(足底形状の変更や足指関節付加などが行える形状) ・足首関節と膝関節には最大トルク15[Nm]を発生できるモータと減速機を使用 ・総重量は9[kg]以内(脚部:5[kg] 質量部:4[kg]を想定) ・全高0.8[m] また以下のような設計方針で部品の選定を行った. ・軽量で高トルクのモータを使用(減速機も含む) ・モータのみで高トルクなモータは重量が重くなる. ・関節直駆動は減速機にかかる負荷が大きい ・一般的に手に入る部品で製作 ・必要トルクを得るための必要電流を発生させる電源 モータの選定 モータは発生トルクが大きければ大きいほど重量が重くなる.市販されているモータと減速機で 仕様を満たすものでなるべく軽量なモータを選定し,maxon 社のモータを採用した. 採用したmaxon 社のモータと減速機を以下に記す.・maxon DC motor RE 36 ∅36 mm, グラファイトブラシ, 70 Watt 公称電圧 18[V]
・maxon gear プラネタリギアヘッド GP 42 C ∅42 mm, 3−15 Nm(セラミックバージョン) モータの計算 ●足首関節の場合 減速比を 81 とし マクソンギアヘッド選定方法より ・モータ回転数の計算 モータ回転数=使用する減速比×使用する回転数 4050 [rpm]=81×50[rpm] ・モータトルクの計算 モータトルク=使用するトルク÷減速比÷効率[%] 257.20 [mNm]=15000[mNm]÷81÷0.72 マクソンモータ選定方法より ・回転数の確認 最大許容回転数8200[rpm] モータの回転数 4050 [rpm] ・トルクの確認 最大連続トルク81[mNm] モータトルク 257.20 [mNm] ・選んだモータの平均的な回転数/トルク勾配∆n/∆M [rpm/mNm]を求める ∆n/∆M=無負荷回転数/停動トルク=9.054[rpm/mNm] (RE36 18[V]の回転数/トルク勾配は 9.23[rpm/mNm])
![図 3.4 のように重力加速度は 9.81[m/s 2 ]としてシミュレーションを行った.](https://thumb-ap.123doks.com/thumbv2/123deta/5671474.510251/10.892.227.633.578.817/図3ように重力加速度は981ms2としてシミュレーションを行っ.webp)
![図 3.13 は跳躍動作の連続写真で,図 3.14 は足首関節の角度である.足首関節の角度に注目する と実験開始時に膝を前に出すように足首を曲げており,そのまま曲げ続けて倒れこみ γ が 14[deg] に達すると足首を伸ばして跳躍した.赤色の点線で挟まれたところが跳躍するために変化した角 度であるが,その角速度は 242[deg/s]と設計で用いた 300[deg/s]まで達してはいなかった.なお, 跳躍高さは約 0.06[m],跳躍距離は約 0.15[m]であった.これは足首のトルクがシミュレーション](https://thumb-ap.123doks.com/thumbv2/123deta/5671474.510251/16.892.116.763.468.908/おり曲げ続け達するところあるなかっなおトルクシミュレーション.webp)
![Fig. 3.17 Motion of jumping (γ=14[deg])](https://thumb-ap.123doks.com/thumbv2/123deta/5671474.510251/17.892.129.776.167.553/fig-motion-of-jumping-γ-deg.webp)
![図 3.17 にシミュレーションによる跳躍動作を示す.図 3.18 は実験とシミュレーションの足首関 節の角度変化である.初期姿勢から前傾して足首を曲げることで角度が増加し,角度γに到達後 足首を伸ばすため減少し,足が地面から離れ跳躍した.跳躍までの角度変化を比較すると,実験 機はシミュレーションとほぼ同等の動きが再現されていることがわかる.また図 3.18 の赤点線枠 で囲った部分から,18[V]よりも 30[V]のほうがシミュレーションに近いことがわかる.シミュレ ーションにおいて跳躍高さは最大 0.1](https://thumb-ap.123doks.com/thumbv2/123deta/5671474.510251/18.892.133.777.176.548/シミュレーションシミュレーションシミュレーション.webp)