中央大学大学院理工学研究科情報工学専攻 修士論文
駅構内における
群集歩行シミュレーションモデルの研究
A Study of Simulation Model for Pedestrian Movement in a Station Yard
学籍番号 04N8100002L 阿久澤 あずみ Azumi AKUZAWA
指導教員 田口 東 教授
2006年3月
概 要
本研究は,追従・追い越しといった個人単位の人の動き (ミクロな動き) と,障害物回 避・歩行流といった群集としての人の流れ(マクロな動き)を表現する群集歩行シミュレー ションモデルを構築することを目的とする.
コンピュータによる群集歩行シミュレーションは,現実では実測が困難な状態での歩行 流動を視覚的に予測・分析できるため,安全な都市空間や施設の実現に対する有用な方法 のひとつとされている.しかし,既存研究においては,空間を細かく分割することによっ て進行方向が限定されるなど,かなり限定的な条件の下でのモデルとなっている.また,
空間を分割しないモデルであっても,鉄道駅のように経路が複数存在する空間に適用され,
ミクロ・マクロな動きまで表現できるモデルは少ない.
本研究では,ネットワークとポテンシャルモデルを組み合わせることによって,進行方 向を限定することなく,歩行行動の特徴を表現する群集歩行シミュレーションモデルを構 築する.ネットワークによって,鉄道駅のような歩行者の歩行経路が一意でない複雑な形 状の領域にも適用可能となる.出口やホームへの移動手段として,エスカレータあるいは 階段を選ぶといった歩行者の行動を,ロジットモデルに基づいてモデル化する.これによ り,時々刻々と変化する各移動施設の効用に合わせて,歩行者の混雑を回避した歩行経路 選択を表現する.また,駅特有の待ち行動である改札回りの歩行行動をモデル化する.
最後に,本モデルを実在する鉄道駅構内に適用し,実測データを用いた現状の再現,お よび本モデルの評価を行なう.そのうえで,密度と歩行速度の関係について考察する.
キーワード: 群集歩行,ネットワーク,ポテンシャルモデル,流体力学的ポテンシャル,待 ち行動
目 次
第1章 序論 1
1.1 研究背景 . . . . 1
1.2 研究目的 . . . . 2
第2章 群集歩行シミュレーションモデル 4 2.1 歩行者パラメータ . . . . 4
2.1.1 人体円 . . . . 5
2.1.2 自由歩行速度 . . . . 5
2.1.3 目的地 . . . . 6
2.2 歩行者・壁・柱の可視判定 . . . . 6
2.2.1 視野 . . . . 6
2.2.2 歩行者の可視判定. . . . 8
2.2.3 壁の可視判定 . . . . 10
2.2.4 柱の可視判定 . . . . 10
2.3 位置座標の決定 . . . . 11
2.3.1 引力の決定 . . . . 11
2.3.2 反発力の決定 . . . . 15
2.3.3 速度ベクトルの決定 . . . . 17
2.4 追従 . . . . 20
2.4.1 歩行流 . . . . 20
2.4.2 追従ベクトル . . . . 21
2.5 流体力学的ポテンシャル . . . . 23
第3章 駅構内への群集歩行シミュレーションモデルの適用 26 3.1 対象とする鉄道駅 . . . . 26
3.2 駅構内移動ネットワーク . . . . 28
3.3 混雑を考慮したリンクコストの決定 . . . . 29
3.3.1 リンクコスト . . . . 29
3.3.2 移動施設選択確率. . . . 30
3.3.3 エスカレータ・階段への歩行者配分 . . . . 33
3.4 ネットワークによる経路選択の表現 . . . . 34
3.5 群集歩行シミュレーションモデルの拡張 . . . . 35
3.5.1 目的地への引力の決定 . . . . 35
3.5.2 流体力学的ポテンシャル . . . . 36
3.5.3 エスカレータ・階段における速度ベクトルの決定 . . . . 37
3.6 改札 . . . . 38
3.6.1 待ち行動. . . . 38
3.6.2 改札ネットワーク. . . . 39
3.6.3 アルゴリズム . . . . 41
第4章 群集歩行シミュレーションモデルの実装 42 4.1 シミュレーションの設定 . . . . 42
4.2 シミュレーション実験 . . . . 43
4.3 解析 . . . . 44
4.3.1 計算時間. . . . 44
4.3.2 群集歩行の特性量. . . . 47
4.3.3 密度と歩行速度の関係式 . . . . 48
第5章 結論 51 5.1 まとめ . . . . 51
5.2 今後の課題 . . . . 51
謝辞 53
参考文献 54
第 1 章 序論
本研究は,追従・追い越しといった個人単位の人の動き (ミクロな動き) と,障害物回 避・歩行流といった群集としての人の流れ (マクロな動き) を表現するモデルを構築する ことを目的とする.具体的には,ネットワークとポテンシャルモデルを組み合わせ,群集 歩行シミュレーションモデルを構築する.ここで,ネットワークは,ミクロな歩行行動を 表現するために用いるのではなく,歩行者の経路選択,すなわち目的地の設定にのみ用い,
ポテンシャルモデルによって求まる速度ベクトルを用いてミクロな歩行行動を表現する.
1.1 研究背景
安全な都市空間や施設を実現するためには,構造的に十分な強度を有することはもちろ ん,利用者の安全性・利便性・快適性確保のための適切な空間設計と,災害やイベント等 の非日常時の適切なオペレーションが必要となる.特に,鉄道駅,地下街,デパート,大 規模展示場などの都市施設においては,不特定多数の利用者が混在するとともに,地理に 不案内であることも多いため,効果的なオペレーションの重要性は高くなる.このような 問題に対し,コンピュータによる群集歩行シミュレーションは,現実では実測が困難な状 態での歩行流動を視覚的に予測・分析できるため,有用な方法のひとつとされている.具 体的には,群集歩行シミュレーションにより,混雑時における歩行流動予測や,施設の処 理能力評価,歩行空間の計画・設計におけるサービス水準の評価,混雑緩和策の考案など が可能となる.
群集歩行シミュレーションモデルについては,幾つかの既存研究が存在する.主に,空 間に速度などの属性を設定するモデルと,歩行者に速度などの属性を設定するモデルがあ る.以下に,主なシミュレーションモデルを示す.
(1) セルオートマトンモデル
空間をセルと呼ばれる格子状の領域に分割し,次の時間ステップのセルの状態を,
その近傍(回りのセル) の状態によって決定するという単純なルールに従って,各セ ルの状態を変化させシミュレートするモデルである.ルールは単純であるが,多数 のセルを使うことで複雑なパターンを形成することができる.セルオートマトンモ デルの特徴は,単純なルールを用いて,定性的なパターンの分類や全体像を定量的 に把握することができる点である.群集歩行を例にとると,密度,歩行速度といっ た変数の空間的分布の時間的変動を調べることができる.
(2) ネットワークモデル
空間をネットワークとして捉え,ネットワーク上 (線上) を歩行者が移動するとい う,大局的な立場からシミュレートするモデルである.線上を移動する歩行者の交 通量を調べることができる.
(3) 流体モデル
群集の流れを連続した流体のように考え,連続方程式や運動方程式に基づいて解析 するモデルである.群集流動の物理的振る舞いが必ずしも流体と一致するわけでは ないが,大局的・定性的な把握を行なうのに向いている.
(4) ポテンシャルモデル
歩行者と障害物に正の電荷,目的地に負の電荷を与え,クーロンの法則に基づき歩 行者が目的地に向かって進むようシミュレートするモデルである.歩行者と障害物 に正の電荷,目的地に負の電荷を与えるため,歩行者同士,歩行者と障害物の間に は距離に依存する反発力が作用し,歩行者と目的地との間には引力が作用する.時 間ステップ毎に,周囲の状況に応じて各歩行者の速度と位置を決定する.
(5) 磁気モデル
歩行者と障害物に正の磁極,目的地に負の磁極を与え,各種の磁場から任意の歩行 者に働く磁力の緩和によって,歩行者の行動をシミュレートするモデルである[17], [18].運動方程式に基づき,単位時間後の歩行者の速度,移動距離や位置等を決定 する.
(6) その他
非衝突領域と歩行のしやすさ (ポテンシャル) を組み合わせて速度ベクトルを決定 するモデル[26],[16]などがある.
(1)から(3) のモデルは,密度や歩行速度,交通量といった変数の大局的な視点からの 把握に向いている.(4)から(6)のモデルは,局所的なところまで表現できるようにした モデルである.
しかし,既存研究においては,空間を細かく分割することによって進行方向が限定され るなど,かなり限定的な条件の下でのモデルとなっている.また,空間を分割しないモデ ルであっても,鉄道駅のように経路が複数存在する空間に適用され,ミクロ・マクロな動 きまで表現できるモデルは少ない.
(4)のポテンシャルモデルは,時間は離散的に扱うが,目的地への引力と障害物からの 反発力から速度ベクトルを求めるため,進行方向を限定することなく単位時間後の位置を 計算することができる.そこで,本研究では,ネットワークとポテンシャルモデルを組み 合わせることによって,進行方向を限定することなく,歩行行動の特徴を表現する.ネッ トワークを用いることによって,鉄道駅のような複数の経路が存在する領域にも適用可能 となる.
1.2 研究目的
本研究では,ポテンシャルモデルをもとにした安西[3]のモデルを参考に,歩行者を群 集として捉えるのではなく,独立して歩行する1つの動体として捉え,個人単位の人の動 き(ミクロな動き) と,群集としての人の流れ(マクロな動き)を表現するモデルを構築す ることを目的とする.具体的には,ネットワークとポテンシャルモデルを組み合わせ,群 集歩行シミュレーションモデルを構築する.これは,進行方向を限定することなく,歩行 者自身がその場の状況に応じて経路を選択していくという行動を合理的にモデル化したも のである.また,不特定多数の利用者が混在する鉄道駅構内 (改札を含むコンコース階) を対象に,群集歩行シミュレーションを行なう.
まず本研究では,ポテンシャルモデルを参考に,単純な形状を対象とした群集歩行シミュ レーションモデルを構築する (第2 章).続く第3 章では,第2 章の拡張として,鉄道駅 構内にモデルを適用する.駅構内では歩行者の歩行経路が一意でないことを表現するため に,駅構内の歩行経路を表すネットワークを新たに組み込む.続いてネットワークのリン クコストを設定する.出口やホームへの移動手段として,エスカレータあるいは階段を選 ぶという歩行者の行動をロジットモデルに基づいてモデル化し,混雑を考慮した各歩行者 の経路選択を表現する.そして最後に,駅特有の待ち行動である改札回りの歩行行動をモ デル化する.第4章では,実測データを用いた現状の再現,および本モデルの評価を行な う.そのうえで,密度や歩行速度といった群集歩行の特性量間の関係について考察する.
第 2 章 群集歩行シミュレーションモデル
人は,目的地に向かう際,目的地に向かって直進するだけでなく,加速・減速したり,
障害物を回避したり,歩きやすい経路を選択するといった行動をとる.また,一見ばらば らに見える各個人の歩行は,全体として見ると,進行方向別に帯状の流れを形成している ことがわかる.本章では,ポテンシャルモデルを参考に,上記のような歩行行動を表現す る群集歩行シミュレーションモデルを構築する.
以下に本モデルの流れを述べる.まず,歩行者にパラメータを与える (2.1 節).次に,
歩行者の視野を定義し,歩行者に,視野に入る他の歩行者や壁などの障害物を,微小な時 間ステップ毎に認識させる (2.2節).歩行者と壁にプラスの電荷,目的地にマイナスの電 荷を与え,これらの電荷の間に働く引力,反発力を計算し,速度ベクトルを決定する.速 度ベクトルから単位時間後の位置座標を決定し,一連の歩行行動を得る (2.3 節).また,
2.4 節,2.5 節では,群集歩行の特徴を表現するために導入した追従ベクトル,流体力学 的ポテンシャルについて説明し,その効果を考察する.
2.1 歩行者パラメータ
本モデルでは,セルオートマトンモデルのように,領域を細かく分割することによって 歩行者の進行方向を限定しないよう,微小時間毎に各歩行者の速度ベクトルを決定し,そ の速度ベクトルから微小時間後の位置を決定する.速度ベクトルを決定するために,各歩 行者に以下の7種類のパラメータ(以下,歩行者パラメータとする) を与える[26].
• 人体円の半径 R[m]
• パーソナルスペース比 c
• 位置座標 P = (x, y)
• 速度ベクトル V [m/sec] = (u, v)
• 自由歩行速度 Vs[m/sec]
• 最大速度比k
• 目的地 D
位置座標と速度ベクトルは時間とともに変化していく値である.
本節では,各パラメータについて説明する.
2.1.1 人体円
一般に歩行者をモデル化する場合,人の体を真上から見た形として,歩行者を三角形や 円,楕円などで表現する.Fruin[1]は,楕円の長軸・短軸を人体の肩幅と厚みの寸法で表 現した人体楕円を用いている.本研究では,モデルを単純にし,シミュレート時の計算量 を少なくするため,歩行者の体を円 (人体円) で表現する (図 2.1).人体円の半径 R は,
[20]の肩幅の寸法を用いて,R = 0.225mとする.
また,歩行者は,厚着をしたり,物を持ちながら歩行したり,他の歩行者との接触を避 けたり,体を揺らしたりしながら歩行している.人体円のみを用いてシミュレーションを 行なうということは,歩行者同士が完全に触れ合う状態を許すことになる.そこで,本モ デルでは,個人の身体を取り巻く目に見えない境界線で囲まれた空間領域,パーソナル・
スペース (個人空間) を導入する.パーソナル・スペースは,他者が入り込むことによっ て不快感を感じる自分自身の占有空間であり,周囲の状況や自己防衛に対する意識的・無 意識的な知覚に応じて伸縮する[21].パーソナル・スペースを用いることにより,衣類や 荷物,他者との接触回避による空間 (余裕) を持たせた歩行者の動きを表現する.パーソ ナル・スペースの形状は円形とし,人体円の半径に対するパーソナル・スペースの半径の 比c(>1.0)をモデルに導入する.本研究では,[26]を参考に,c= 1.2 とする.
R
2R 2cR
人体円
パーソナル・スペース
図2.1 人体円
2.1.2 自由歩行速度
人は,周囲の障害物等の影響から,一定速度ではなく,加速・減速を繰り返しながら歩 行している.しかし,周囲の障害物等から物理的・心理的影響を受けることがない場合に は,無理に加速・減速することなく,歩行者自身の最も歩きやすい速度で歩行する.この ような歩行を自由歩行という.この自由歩行時の速度を自由歩行速度 Vs と定義する.本 研究では,Vs= 1.33 +σ[m/sec] とする.σ は,平均0,標準偏差0.1の正規分布に従う 乱数である.
また,歩行者が他の歩行者との衝突を回避する際,瞬間的に加速し,自由歩行速度より
速い速度で進むことがある.このとき歩くことのできる最大の歩行速度を最大歩行速度と し,自由歩行速度に対する最大歩行速度の比を最大速度比kとする.本研究では,[26]を 参考に,k= 1.2とする.
2.1.3 目的地
歩行者は,ある場所を目指し歩行する.このとき,ある一点を目指すのではなく,ある 領域を目指していると考えられる.そこで本研究では,目的地を点ではなく線分で表す.
歩行者の歩行経路は,周囲の障害物からの影響がなければ,目的地への最短経路となる と考えられる.本モデルでは,この仮定の下で,歩行者は目的地に最も近い点へ向かう最 短歩行経路を選択するものとする.したがって,図2.2のような線分ST を目的地とする 歩行者A,B,Cは,それぞれ図の矢印の方向へ進む.ただし,目的地の端点S (T)を中 心とする半径cRの円 OS (OT) と線分ST の交点を通る,円OS (OT) の接線lS (lT)に 関して,点S (T) 側に位置する歩行者A (C)は,現在地から円 OS (OT) への接線ベクト ルの方向へ進む.これは,歩行者の現在地 (位置座標) が人体円の中心を表しているため である.点S (T) から現在地までの距離がパーソナル・スペースの半径cR未満であるこ とは,パーソナル・スペース内に壁が入り込んでいることを意味している.さらに,人体 円の半径 R 以下であれば,壁への衝突を意味する.
lS S OS
lT T OT
A
B C
図2.2 目的地と自由歩行
2.2 歩行者・壁・柱の可視判定
2.2.1 視野
人は,前方にいる他の歩行者や壁,柱などの障害物を認知すると,衝突の危険を察知し,
回避行動を行なう.このとき,前方の障害物すべてから影響を受けるわけではなく,ある 空間に入った障害物からのみ影響を受ける.この空間を視野と定める.既存研究において,
この視野に相当する空間として,円や扇形,長方形など,様々な形状が考えられているが,
本研究では,扇形を用いる.また,壁・柱は人間の身長よりも高いため,人は,遠くにあ る壁・柱も認識することができる.しかし,歩行者の場合,他者との重なりなどによって,
壁・柱ほど遠くまで他の歩行者を認識することはできない.このように,歩行者を認識す る範囲と壁・柱を認識する範囲とでは,距離に差があると考えられる.そこで,本研究で は,他の歩行者に対する視野と壁 (柱) に対する視野を個別に定義する.すなわち歩行者 は,歩行者を認識するための視野と,壁(柱) を認識するための視野の2種類の視野をも つことになる.
人間学者Hallは,人間の感覚特性に基づいて,人間間隔距離を公衆距離,社会距離,個 体距離,密接距離の4種類に分類した[1].本研究では,歩行者に対する視野を,公衆距離 の近接相を用いて半径 Rped = 7.5m の扇形,壁に対する視野を,公衆距離の遠方相を用
いて半径 Rwall = 25mの扇形とする.また,歩行時の視野はおよそ左右 60◦ であること
から,扇形の中心角はそれぞれ120◦ とする[1].
しかし,視野の大きさは常に一定ではなく,周囲の状況によって変化すると考えられる.
また,歩行者周辺の密度が高い場所や,改札前やエスカレータ前などの何かに集中する・
注意を払う場所においては,歩行者の速度は減少する.そこで,速度が減少した場合,近 くの障害物にのみ注意を向けるよう,パラメータγ を導入する.扇形の半径が速度 V に 依存するよう,γ を
γ =
1 (||V|| ≥Vsのとき)
||V||
Vs (それ以外のとき) (2.1) とする.γ を用いて,歩行者に対する視野 (扇形) の半径 rped と壁に対する視野 (扇形) の半径 rwall は,それぞれ以下のようになる.
rped=Rped×γ+ 3R×(1−γ) [m], (2.2) rwall =Rwall×γ+ 2.1×(1−γ) [m]. (2.3) つまり,歩行者の速度が速いほど (密度が低いほど) 遠くの障害物まで認識し,歩行者の 速度が遅いほど (密度が高いほど) 近くの障害物のみを認識する.自由歩行時(γ = 1のと
Rped
Rwall
3R 2.1m
60◦
γ = 1 γ = 0
図2.3 視野
き) には,7.5[m]前方の歩行者まで認識することができ (図2.3の紫色実線),停止する必 要があるとき(γ = 0のとき) には,歩行者自身の人体円の半径 (R) に歩行者1人分の人 体円の直径 (2R) を加えた 3R の範囲内の歩行者のみ認識することになる (図 2.3の紫色 点線).同様に壁・柱も,自由歩行時(γ = 1のとき) には,25[m] 前方の壁・柱まで認識 することができ (図2.3の緑色実線),停止する必要があるとき(γ = 0 のとき) には, 社 会距離である2.1[m]前方の壁・柱のみ認識する (図2.3の緑色点線).
上記で定義した視野を用いて,視野に入る歩行者や壁などの障害物を微小な時間ステッ プ毎に各歩行者に認識させる.
2.2.2 歩行者の可視判定
他の歩行者の体が一部でも視野に入る場合,その歩行者は視野に入るものとする(図2.4). 歩行者の現在地 (位置座標) が人体円の中心を表しているため,半径 rped の扇形から R 離れた範囲内に他の歩行者の現在地が含まれれば,その歩行者は認識されることになる.
歩行者同士の重なりによって隠れる歩行者であっても,半径rped の扇形からR 離れた範 囲内に位置していれば認識されるものとする.
´ I I J
l r
´j
視野内の歩行者 視野外の歩行者
図2.4 他の歩行者の認識
歩行者iの位置をI,他の歩行者j の位置をJ,歩行者iの視野を表す左右のベクトル をl,r とする.歩行者j が歩行者 iの視野内にいる場合,歩行者iの進行方向に対しR 後ろの位置I´
I´=I− 2
p3R· V
||V|| (2.4)
から歩行者j へのベクトルj´ は以下を満たす.
´j=λ1l+λ2r, (2.5)
λ1 >0, (2.6)
λ2 >0, (2.7)
||j´|| ≤rped+ 2R. (2.8)
上式を満たす歩行者j を歩行者 iに記憶させる.
ただし,すべての歩行者を対象に可視判定を行なう場合,歩行領域内の歩行者を N と すると,その計算量はO(N2) となり,莫大な計算時間がかかる.そこで,計算時間を削 減するために,以下の方法を行なう.
歩行者の可視判定方法
領域を,一辺7.5[m] (歩行者を認識するための視野である扇形の半径の最大値Rped)の 正方形の領域(以下,セルとする)に分割する.歩行者の属するセルと周囲8セルの,9セ ルに属する歩行者のみを対象に,可視判定を行なう (図2.5).
7.5m
図 2.5 歩行者の可視判定方法
上記の方法によって,すべての歩行者を対象に可視判定を行なう場合よりも,計算時間 を削減することが可能となる.計算時間については,4.3.1節で詳しく述べる.
2.2.3 壁の可視判定
壁が一部でも視野に入る場合,その壁は視野に入るものとする(図2.6).まず,歩行者 の視野には入るが実際には見えない壁を,単純な計算方法により除去する.
歩行者 i の位置を I,I から各壁 j への最短ベクトルを jとする.ベクトルj と壁の 法線ベクトルnとの内積より,歩行者側から見える壁か判定する.
j·n>0, (歩行者側から見えない壁の場合)
j·n≤0. (歩行者側から見える壁の場合) (2.9) 上記の判定条件より,歩行者側から見える壁を対象に,可視判定を行なう.歩行者iの 視野を表す左右のベクトルをl,r とする.壁j が視野内にある場合,壁 j とl,rが交 差する.もしくは,ベクトルj が,
j=λ1l+λ2r, (2.10)
λ1 >0, (2.11)
λ2 >0, (2.12)
||j|| ≤rwall (2.13)
を満たす.上記を満たす壁 jを歩行者に記憶させる.これにより,歩行者側から見て裏側 になるため実際に見えない壁を含まず,視野に入る壁を障害物として記憶させることがで きる.図2.6の例では,緑色で表示した壁が歩行者の視野に入る.
I j
V n
l r
図 2.6 壁の認識
2.2.4 柱の可視判定
本研究では,柱は円柱とする.円柱でないものは,壁として扱う.したがって,柱を真 上から見た形は円となるため,柱の可視判定は,壁と同様の判定ではなく,歩行者と同様 の判定を行なう.ただし,視野の扇形の半径は rwall を用いる.
2.3 位置座標の決定
歩行者と壁にプラスの電荷,目的地にマイナスの電荷を与え,これらの電荷の間に働く 引力 E,反発力F を計算し,速度ベクトルを決定する.求めた速度ベクトルから単位時 間後の位置座標を決定する.
2.3.1 引力の決定
電荷の間に働く引力を E とする.引力 E の決定には,歩行者の現在地 P から目的 地 Dへの位置ベクトル eD を用いる.ここで,位置ベクトルeD を単に目的地までの距 離が最短となるベクトルとすると,経路途中に障害物が存在した場合,位置ベクトルeD
は障害物と衝突するベクトルとなる.そこで,障害物との衝突を回避するベクトルを位置 ベクトル eD とするために,現在地から障害物 (多角形および円) への接線を用いて,位 置ベクトル eD を以下のように決定する.step 1,step 2は壁によって遮られる場合の 位置ベクトル eD の変更方法,step 3,step 4は柱によって遮られる場合の位置ベクト ルeD の変更方法を表している.ここで,歩行者から見た目的地の左端点を l,右端点を r,柱iの半径を Rporli とする.
位置ベクトル eD の決定アルゴリズム
step 0 歩行者は目的地への最短経路を選択すると仮定し (2.1.3節),歩行者の現在地 P から目的地 D への距離が最短となる位置ベクトルを eD とする(図2.7,図2.8の 桃色破線矢印).
step 1 歩行者の視野に入る壁のうち,eD と交差する壁があるならば,step 2を行なう.
そうでなければ,step 3を行なう.
step 2 eD と交差する壁の中で,歩行者の現在地から壁までの距離が最短となる壁を j
とする.壁j を一辺とする n角形のポリゴンの頂点 pi(xi, yi) (i= 1,2,· · ·, n) が,
順序のついた列で与えられたとき,以下の (a)〜(d)を行なう.
(a) m:= 0 とおく.
(b) i:= 1 から1ずつ増やしnになるまで以下の (i)を繰り返す.
(i) 歩行者の現在地から頂点pi へ向けて有向線を延ばしたとき,この有向線の 片側に他の頂点がすべて存在するならば,頂点pi をqm とし,m:=m+ 1 とする.
(c) m = 1 ならば,k:=q0 とする.m >1 ならば,頂点 qi(0≤i < m) のうち,
目的地により近い方向に位置する頂点をkとするために,歩行者の現在地から 頂点 qi へのベクトルと,歩行者の現在地から目的地の端点 l,r へのベクトル のなす角θqil,θqir を用いて, kを
k:={qi|θqil+θqir≤θqjl+θqjr, i6=j,0≤i, j < m} とする.
(d) 歩行者の現在地から,頂点 k を中心とする半径 cR の円への接線ベクトルを eD として更新する (図2.7の桃色実線矢印) .
V l
r
D eD
l
k r θkl
θkr
図2.7 引力の決定(壁との交差判定)
step 3 歩行者の視野に入る柱のうち,eD と交差する柱があるならば,step 4を行なう.
そうでなければ,終了する.
step 4 eD と交差する柱の中で,歩行者の現在地から柱までの距離が最短となる柱を j
とする.柱j に対して以下の (a),(b)を行なう.
(a) 歩行者から見て,歩行者の現在地から,柱jの中心を中心とする半径Rporlj+cR の円への左右の接線ベクトルをTl,Tr,左右の接点をpl,pr とする(図2.8). (b) 線分 plpr によって,目的地の端点 l,r のどちらか一方が見えないならば以下
の(i)を行なう.両方とも見える,もしくは両方とも見えないならば以下の(ii) を行なう.
(i) 目的地の端点lのみ見えるならば eD :=Tl として終了する.目的地の端 点r のみ見えるならば eD :=Tr として終了する.
(ii) 歩行者の現在地から目的地の端点l,r の方向の密度を,それぞれKl,Kr
とする.Kl < Kr ならば eD := Tl として終了する.そうでなければ
eD :=Tr として終了する.
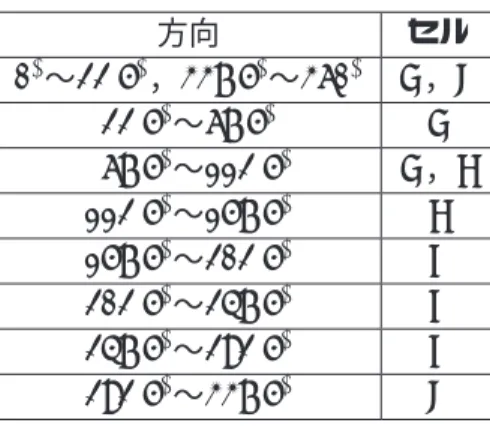
step 4の(ii) は,柱の左右の混雑を考慮した上で進行方向を選択する歩行行動を表現 している.密度Kl,Kr は,2.2.2節の歩行者の可視判定で用いた一辺7.5[m]のセルを使 い,図2.9のように定める.まず,歩行者の属するセルを4つの領域に分割する(図2.9). 各領域を第1象限,第2象限,第3象限,第4象限とみなす.歩行者が第 1象限に位置す る場合は図 2.9の赤色で囲まれた4つのセル,第2象限に位置する場合は緑色で囲まれた 4つのセル,第3象限に位置する場合は黄色で囲まれた4つのセル,第4象限に位置する 場合は青色で囲まれた4つのセルを対象に密度を決定する.歩行者の現在地から目的地の 端点への方向と,密度を求めるために用いるセルとの対応を表2.1,図2.10に示す.歩行 者が第1象限に位置する,図 2.10(b)を例に,密度の決定方法について述べる.歩行者の 現在地 P(x, y) を基準として水平右方向を 0◦ とし,図 2.10(b)のように8方向に分割す
る.表 2.1より,目的地の端点への方向と対応するセルを用いて,密度を求める.ただし,
対応するセルが存在しない場合,歩行者が現在属するセル内の密度を用いる.図2.8を例 にすると,歩行者は4つの領域のうち,第1象限に位置し,端点 l (r) への方向は 22.5◦ から 67.5◦ (292.5◦ から 337.5◦)の範囲にあるため,図の青色 (紫色) のセル内の密度が密 度Kl (Kr) となる.
V l
r
D Tl
Tr l
r Kl
Kr pl
pr
22.5◦ 67.5◦
292.5◦
337.5◦
図2.8 引力の決定(柱との交差判定)
歩行者 7.5m
7.5m
2 1 3 4
図 2.9 密度の決定
表2.1 方向とセルの対応
方向 セル
0◦〜22.5◦,337.5◦〜360◦ A,D 22.5◦〜67.5◦ A 67.5◦〜112.5◦ A,B 112.5◦〜157.5◦ B 157.5◦〜202.5◦ C 202.5◦〜247.5◦ C 247.5◦〜292.5◦ C 292.5◦〜337.5◦ D
292.5◦ 337.5◦ 0◦
22.5◦
67.5◦
112.5◦
157.5◦ 202.5◦
247.5◦
A D
B C
(a)第2象限
0◦ 22.5◦ 67.5◦
112.5◦
157.5◦
202.5◦
247.5◦ 292.5◦
337.5◦
B A
C D
(b)第1象限
157.5◦ 202.5◦ 247.5◦
292.5◦ 337.5◦
0◦
22.5◦
67.5◦ 112.5◦
D C
A B
(c) 第3象限
67.5◦ 112.5◦ 157.5◦
202.5◦
247.5◦
292.5◦
337.5◦ 0◦ 22.5◦
C B
D A
(d)第4象限
図 2.10 方向とセルの対応
上記で求めた位置ベクトルeD と目的地に与える電荷QD を用いて,引力 E は E =QD· eD
||eD|| (2.14)
とする.歩行者が目的地からどれだけ離れた場所に位置していようと,目的地に引き寄せ られる力は変わらないとし,引力E の大きさは,目的地までの距離にかかわらず一定と する.以上の流れをフローチャートにまとめたものを,図2.11に示す.
引力の決定
円O の接線より端点側に位置する Yes No
円O への接線ベクトルの算出 目的地までの最短ベクトルの算出
視野内の壁と交差 No
Yes
交差する壁を回避するベクトルの算出 (位置ベクトルの更新)
視野内の柱と交差 No
Yes
交差する柱を回避する接線ベクトルの算出 (位置ベクトルの更新)
引力の算出 終了
図2.11 フローチャート(引力の決定)
2.3.2 反発力の決定
人は,他の歩行者の現在の速度(ベクトル)から,“自分の方へ向かってきている”,“速 い速度で歩いている ”,“このまま歩くとぶつかる ”といった予測をしていると考えられ る.そこで,反発力の決定に t秒後の歩行者iの位置を用いることによって,他の歩行者 の歩行行動予測を表現する.本研究では,歩行者の現在地から,t秒後の他の歩行者iの 位置への位置ベクトルを fpedi とし,t= 1[sec]とする.また,歩行者の現在地から,視 野内の壁 iへの距離が最短となる位置ベクトルをfwalli,柱 iの中心への位置ベクトルを fporli とする.
各障害物への位置ベクトル fpedi,fwalli,fporli を用いて,他の歩行者,壁,柱からの 反発力は,それぞれ
Fpedi = Qped
||fped
i||2 · fped
i
||fped
i|| ·cosθpedi, (cosθpedi >0) (2.15) Fped=
nXped
i=1
Fpedi, (2.16)
Fwalli = Qwall
||fwalli||2 · fwalli
||fwalli||·1 + cosθwalli
4 , (2.17)
Fwall=
nXwall
i=1
Fwalli, (2.18)
Fporli = Qporl
||fporl
i||2 · fporl
i
||fporl
i||·cosθporli, (cosθporli >0) (2.19) Fporl=
nXporl
i=1
Fporli (2.20)
とする.Qped,Qwall,Qporl は各障害物に与える電荷の大きさ,θped,θwall,θporl は引 力 E と各位置ベクトルとのなす角,nped,nwall,nporl は視野内の各障害物の数である.
式 (2.15),式(2.17),式 (2.19)において余弦を乗ずるのは,障害物に向かって進めば進 むほど反発力を大きく,平行もしくは遠ざかる方向へ進むほど反発力を小さくするためで ある.ただし,壁i と壁j のなす歩行者側の角θi,jが
θi,j ≥180◦ (2.21)
となる壁は,1枚の同じ壁として扱う.歩行者の現在地から壁i,j への距離が最短となる 位置ベクトルfwalli,fwallj を求め,
||fwalli||<||fwallj|| (2.22) となる壁 i を対象に,式(2.17) を計算する.図2.12を例にすると,θ1,2 は180◦ より小 さいため,歩行者は壁1と壁2から反発力を受ける.しかし,θ2,3 は 180◦ 以上であり,
||fwall2||より ||fwall3|| の方が大きいため,歩行者は壁3からは反発力を受けないことに なる.
他の歩行者からの反発力と壁・柱からの反発力を用いて,反発力F は
F =Fped+Fwall+Fporl (2.23)
となる.
E
fwall1 fwall2 fwall3
fporl
1
fped
j
l
r
j
wall1
wall2
wall3 porl1
θwall1 θwall2
θ1,2
θ2,3
図 2.12 反発力の決定
2.3.3 速度ベクトルの決定
単位時間 dt 後の速度 Vnew は,現在の速度V および,2.3.1節,2.3.2節で求めた引 力E,反発力F を用いて
V´ =V + (E−F)·dt, (2.24)
Vnew=Vs· V´ V0
(2.25)
とする.V0 は,自由歩行時のシミュレーションにおいて算出される式(2.24) の||V´|| の 最大値である.これにより,Vnew は0からVs の大きさをもつベクトルとなる.
上式を用いて,単位時間 dt後の位置座標Pnew は,現在の位置座標P を用いて
Pnew=P +Vnew·dt (2.26)
となる.式(2.26) を用いて,シミュレーションを行なう.
シミュレーション1
縦30[m],横30[m] の平面領域において,左および下から歩行者を1人ずつ同時刻に発
生させる.シミュレーションにおける単位時間 dt は 0.05[sec]とする.図 2.13は,歩行 者 A,Bが交差するときの挙動であり,0.1秒毎の歩行軌跡を拡大して図示している.各
歩行者の自由歩行速度はともに1.33[m/sec]とする.平面領域の左側を出発地とする歩行 者Aは,右側の辺を目的地とし,平面領域の下側を出発地とする歩行者Bは,上側の辺 を目的地とする.図 2.13(a)は,他の歩行者から受ける反発力として,歩行者の現在地か ら他の歩行者の現在地への位置ベクトルを用いた結果であり,図2.13(b)は,他の歩行者 から受ける反発力として,歩行者の現在地からt秒後の他の歩行者の位置へのベクトルを 用いた結果である.図 2.13(a)では,歩行者 Aが,歩行者 Bに接近した際進路を急に変 更していることがわかる.これに対し,図 2.13(b)では,予め進路を横に逸らしているた め,急な進路変更をしていない.他の歩行者のt秒後の位置から反発力を受けるとするこ とによって,他の歩行者の歩行行動を予測した上での動きを表現していることがわかる.
歩行者A →
↑歩行者B
(a)他の歩行者の現在地からの反発力
歩行者A→
↑歩行者B
(b)他の歩行者のt秒後の位置からの反発力
図2.13 シミュレーション(交差時の歩行軌跡)
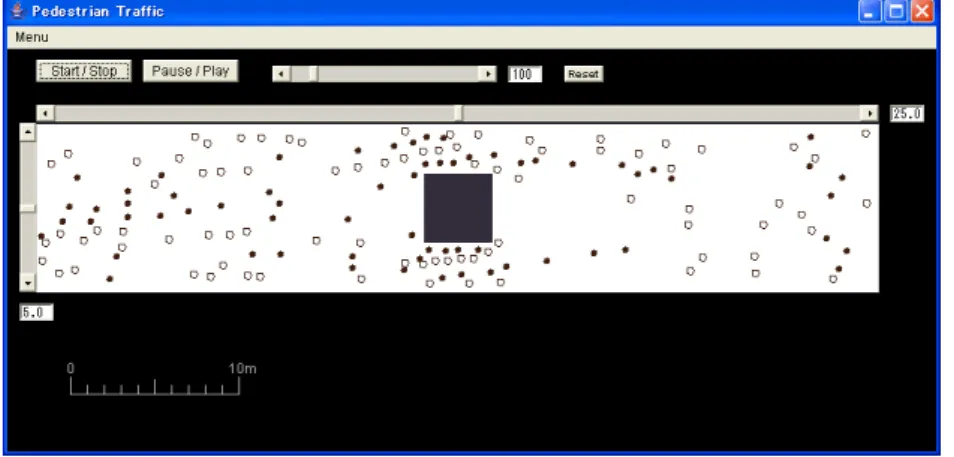
シミュレーション2
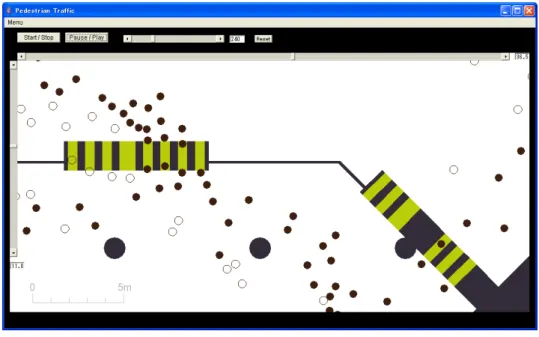
縦 10[m],横 50[m] の平面領域の中心に縦 4[m],横 4[m] の凹形状の障害物が存在す る領域において,到着率 2[人/sec]のポアソン過程に従い,歩行者を左右から発生させる (図2.14).また,縦10[m],横50[m]の平面領域において,到着率4[人/sec]のポアソン 分布に従い,歩行者を左右から発生させたときの歩行行動を図 2.15に示す.シミュレー ションにおける単位時間dt を0.05[sec],自由歩行速度を1.33 +σ[m/sec]とする.σ は,
平均0,標準偏差0.1の正規分布に従う乱数である.平面領域の左側を出発地とする歩行 者(黒い円) は,右側の辺を目的地とし,平面領域の右側を出発地とする歩行者(白い円) は,左側の辺を目的地とする.
図 2.14より,障害物が凹形状であっても,障害物への接線を用いて引力を決定してい
るため,凹部に閉じ込められることなく,移動していることがわかる.しかし,図2.15よ り,群集歩行の特徴の1つである歩行流が再現できていないことがわかる.これは,混雑 した場所においては,人の流れに逆らうことを避け,自分と同じ方向へ進む前方の歩行者 について歩くという追従の概念がモデルに組み込まれていないためと考えられる.そこで 次節では,追従・歩行流を表現するために用いた追従ベクトルについて述べる.
図 2.14 シミュレーション(凹形状の障害物)
図2.15 シミュレーション(対向流)
次に,歩行者が障害物を回避するときの0.5秒毎の歩行軌跡を図2.16に示す.図2.16よ り,経路途中に障害物が存在した場合,障害物回りでの速度が非常に遅くなり,滑らかな 動きを表現できていないことがわかる.2.5節では,滑らかな歩行を表現するために,流 体力学的ポテンシャルを導入する.
→
図2.16 シミュレーション(凹形状の障害物回りの歩行軌跡)
2.4 追従
2.4.1 歩行流
[22],[26]によると,二方向の歩行流(対向流)は次のように変化していく.まず,歩行 者は自分の目指す方向へまっすぐに歩きだす.このとき,歩行速度の速い歩行者が集団を リードする形となり,三角形の流れが双方向にできる(図2.17(a)).両方向の先頭同士が ぶつかると,先頭にいる歩行者は互いに回避し合い,後ろに続く集団はその先頭にいる歩 行者の背後について,矢尻のような隊形をとる(図2.17(b),図2.17(c)).少し進むと流れ は何本かの筋に帯状化していき,互いに行き違い,スムーズに交差する (図2.17(d)).歩 行者数が減少すると,前方の歩行可能領域が広くなるため,各々目的地に従い歩行経路の 範囲が広がっていく(図2.17(e),図2.17(f)).
(a) (b) (c)
(d) (e) (f)
図2.17 歩行流
2.4.2 追従ベクトル
追従を表現するために,追従ベクトルを導入する.追従ベクトルとは,自分の進みたい 方向に近い方向へ進む視野内の歩行者へ向かうベクトルであり,これを引力 E2 とする.
2.3.1 節で求めた引力E をE1 とし,速度ベクトルの計算に用いる引力 E をE1 と E2 の合力として表す.ここで,歩行者iの速度ベクトルと,視野内の他の歩行者j の速度ベ クトルとのなす角θij が,
cosθij >0.95 (2.27)
となる歩行者j を,自分の進みたい方向に近い方向へ進む歩行者とし,
cosθij ≤0 (2.28)
となる歩行者j を対向者とする.
式 (2.27)を満たす歩行者の中から,歩行者 i の自由歩行速度に最も近い速度で進む歩
行者を選び,その歩行者へ向かう位置ベクトルを ef とする.求めた位置ベクトルef と 電荷Qf を用いて,引力E2 は
E2 =Ko·Qf · ef
||ef|| (2.29)
とする.ここで,Ko は単位面積あたりの対向者数であり,
密度Ko = 視野内の対向者数No
視野の面積S (2.30) となる.したがって式(2.29)は,歩行者周辺に対向者が多く,歩行流に逆らうように進ん でいる場合,群集の波を避ける力がより強く働くことを意味している.シミュレーション 実験の結果,引力E1 の決定に用いた電荷QD とQf の比は,歩行流の幅が歩行者1,2 人 分程度となった
QD :Qf = 1 : 0.0633 (2.31)
とする.
i ef
図 2.18 追従ベクトル
シミュレーション3
図2.17のような歩行流が,これまでに作成したモデルで再現できているか確認するため に,シミュレーション2同様,縦10[m],横50[m]の平面領域において,到着率 4[人/sec]
のポアソン分布に従い,歩行者を左右から発生させる (図 2.19).シミュレーションにお ける単位時間を 0.05[sec],自由歩行速度を1.33 +σ[m/sec]とする.σ は,平均0,標準 偏差0.1の正規分布に従う乱数である.出発地および目的地は,シミュレーション2と同 様であり,左から右へ向かう歩行者を黒い円,右から左へ向かう歩行者を白い円で表す.
図 2.19より,対向者を回避しながら追従する歩行者が見られる.大局的には,帯状の 流れが交互に形成され,歩行流が見られる.
図2.19 シミュレーション(歩行流)
2.5 流体力学的ポテンシャル
障害物周辺での動きを滑らかに表現するために,流体力学的ポテンシャルを用いる.流 体力学的ポテンシャルとは,物体回りの空間に感じる近寄りにくさや危険度,あるいは魅 力的引力といった大きさを表すものである(図2.20).具体的には,目的地に向かってポテ ンシャルは低くなり,逆に障害物の回りではポテンシャルは高くなる.このような場にお いて,流体は,ポテンシャルの高いほうから低い方へ,物体を回避しながら滑らかに流れ ていく.(これは,標高の高い場所から低い場所へと水が流れることと同様である.) 障害 物が複数存在する場合には,個々の障害物や目的地によるポテンシャルは合成され,1つ のポテンシャル場が形成される.このポテンシャル場から求まる勾配ベクトルを引力 E3 として引力 E に合成することにより,ポテンシャルの山々を回避した滑らかな歩行行動 を表現する.
高 低
壁
壁
図 2.20 流体力学的ポテンシャル
本研究では,完全流体の支配方程式より求まるラプラス方程式を,境界値問題として差 分法を用いて解く[7],[8].連続式を離散化するため,対象領域を格子幅0.1mの格子に分 割する.打ち切り誤差は10−6 とする.境界条件はNeumann条件(自然境界条件) を用い る.出発地となる辺に流入条件,目的地となる辺に流出条件を与えることにより,出発地 から目的地へ流れるポテンシャル場を求めることができる.ただし,出発地・目的地の組 合せの数だけポテンシャル場が存在するため,経路毎にポテンシャル場を算出する必要が ある.すなわち,シミュレーション2のような平面領域においてシミュレーションを行な う場合,左から右,右から左の2通りのポテンシャル場を予め計算することが必要となる.
ポテンシャル場より求まる勾配ベクトルep を用いて,引力E3 は E3 =Qp· ep
||ep|| (2.32)
とする.シミュレーション実験の結果,引力 E1 の決定に用いた電荷QD とQp の比は,
障害物回りにおいて流体力学的ポテンシャルの効果が見られた
QD :Qp = 1 : 0.0625 (2.33)
とする.引力E1,E2,E3 を用いて,引力E は,
E=E1+E2+E3 (2.34)
となる.
以上の流れをフローチャートにまとめたものを,図 2.21に示す.
前処理 (データ読み込み,ポテンシャル場の算出)
視野に入る歩行者と障害物の判定 引力の計算
反発力の計算 dt後の速度・位置の計算
障害物と交差 Yes
No 速度の更新
目的地に到達 No
Yes 終了
図2.21 フローチャート
シミュレーション4 (凸形状の障害物)
縦 10[m],横 50[m] の平面領域の中心に縦 4[m],横 4[m] の凸形状の障害物が存在す る領域において,到着率 2[人/sec]のポアソン分布に従い,歩行者を左右から発生させる (図2.22).シミュレーションにおける単位時間を0.05[sec],自由歩行速度を1.33+σ[m/sec]
とする.σ は,平均0,標準偏差0.1の正規分布に従う乱数である.出発地および目的地 は,シミュレーション2と同様であり,左から右へ向かう歩行者を黒い円,右から左へ向 かう歩行者を白い円で表す.また,歩行者が障害物を回避するときの0.5秒毎の歩行軌跡 を図2.23に示す.
図 2.16では障害物回りでの滑らかな動作を表現することができなかったが,流体力学 的ポテンシャルを導入することにより,障害物回りでの動作が滑らかになっている.また,
2.4 節で導入した追従ベクトルの効果により,障害物の両側においても歩行流ができるこ とがわかる.
図 2.22 シミュレーション(凸形状の障害物)
→
図2.23 シミュレーション(凸形状の障害物回りの歩行軌跡)
単純な形状の領域における群集歩行は,本章のモデルで表現できる.しかし,鉄道駅の ような,目的地までの経路が複数存在する領域においては,上記のモデルだけでは表現す ることができない.第3 章では,鉄道駅を対象としたシミュレーションモデルの構築につ いて説明する.
第 3 章 駅構内への群集歩行シミュレーション モデルの適用
一本道のような単純な形状の領域においては,第2章で構築したモデルを用いて群集歩 行を表現することができる.しかし,鉄道駅のような複数の経路が存在する場所において は,第2章で構築したモデルだけでは,現実的な群集歩行を表現することができない.そ こで本研究では,群集としてのマクロな動きを表現するために,第2章で構築したモデル とネットワークを組み合わせる.ネットワークは,歩行者がネットワーク上(線上)を移動 するというミクロな歩行行動を表現するために用いるのではなく,歩行者の経路選択にの み用いる.具体的には,混雑を考慮したリンクコストを設け,Dijkstra法より求まる最短 経路を歩行者の歩行経路とする.これは,進行方向を限定することなく,歩行者自身がそ の場の状況に応じて経路を選択していくという行動を合理的にモデル化したものである.
本章では,まず,シミュレーションの対象とするA線B駅のコンコース階を例に,ネッ トワークの作成方法(3.2節),および経路選択方法(3.3節,3.4節)について述べる.この とき,出口やホームへの移動手段として,エスカレータあるいは階段を選ぶという歩行者 の行動を,ロジットモデルに基づいてモデル化し,歩行者の混雑を考慮した経路選択を記 述する.また,3.6節では,駅特有の待ち行動である改札回りの歩行行動をモデル化する.
3.1 対象とする鉄道駅
本研究で対象とするA線B駅は,乗降客の多い大規模なターミナル駅となっている.
A 線B駅構内の平面図を図 3.1に示す.
南口 正面口
図 3.1 A線B駅構内の平面図
A線B駅において,改札口は正面口と南口の2 箇所存在する.本研究では,正面口の みを対象に,群集歩行シミュレーションを行なう(図3.2).本研究で対象とする正面口は,
縦 25.9[m],横65.0[m] の領域である.改札が対象領域を真横に二分するという特徴のあ
る形状をしており,図 3.2の改札の上側(青)が改札外コンコース,下側 (黄)が改札内コ ンコースとなっている.正面口において,コンコース階からホーム階への移動手段,コン コース階から出口または他路線への連絡通路への移動手段は,ともに,エスカレータ・階
券売機 改札1
改札2
図 3.2 正面口(対象領域)の平面図
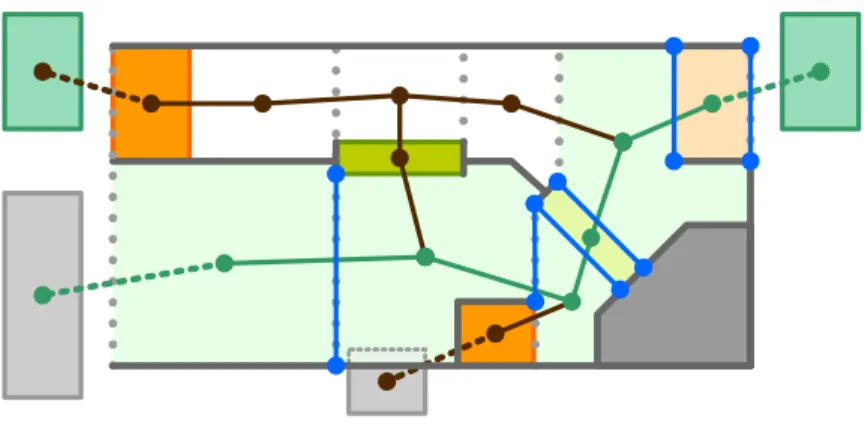
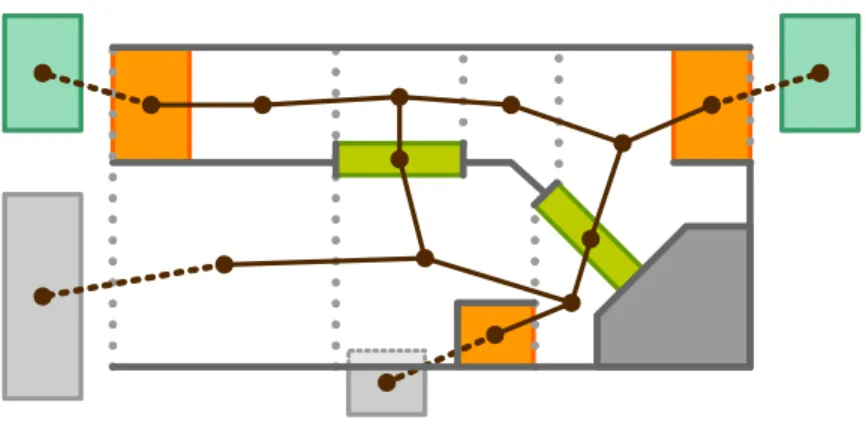
段 (以下,移動施設とする) となっている.また,改札は2 箇所存在し,図 3.2の改札 1 には8台の改札機,改札2には6台の改札機が設置されている.券売機は,図 3.2の右上 の領域 (桃) に10台設置されている.A線B駅構内の実際の寸法をもとに,Javaを用い て対象領域を表示したものを図3.3に示す.各線分,ポリゴンと色の対応を表 3.1に示す.
表 3.1 駅構内の各施設と線分・ポリゴンの色の対応 駅構内の各施設 線分・ポリゴンの色
壁・柱 黒
エスカレータ(入) 桃 エスカレータ(出) 橙
階段 黄
改札 緑
通路 白
図3.3 正面口の平面図(Java)
正面口を対象に,ネットワークの作成を行なう.
3.2 駅構内移動ネットワーク
本研究では,鉄道駅における歩行者は合理的に経路を選択すると仮定し,ネットワーク (以下,駅構内移動ネットワークとする) を用いて群集としてのマクロな動きを表現する.
ただし,歩行者の単独行動に限定し,待合室やトイレ,売店,ロッカーへ行くなどの副次 的行動は対象としない.
ここで,歩行者が,エスカレータを経由する歩行経路と階段を経由する歩行経路のど ちらも選択することができるよう,3.1節で述べた対象領域に,各出入口を表すポリゴン geteway,platformを新たに追加する (図 3.4).このポリゴンを歩行者の最終的な目的地 (以下,最終目的地とする) と設定することにより,出口までの移動手段をエスカレータ・
階段と固定することなく,混雑を考慮した歩行者の経路選択を表現することができる.
gateway1 gateway2
platform1
platform2
図3.4 出入口
駅構内移動ネットワークの作成方法を以下に示す.
1. 次の4点を満たすように,駅構内を面の役割ごとにポリゴンに分割し,属性(階段,
エスカレータ,改札,通路,壁) を持たせる.
(a) 面の属性が異なる領域は,必ず分割する.
(b) 同じ属性を持つ連続した領域を,異なるポリゴンに分割しない.
(c) 歩行経路の分岐点となる領域を分割する.
(d) 歩行流に対し,なるべく直角に分割する.
2. 歩行者の最終目的地となる,対象領域への出入口を表すポリゴンgateway1,gate- way2,platform1,platform2を作成する(図3.4).
3. 通行可能な各ポリゴンにノードを対応させ,隣接するポリゴン間の境界辺が通行可 能であれば各ノード間にリンクをはり,ネットワークを作成する(図3.5).
![表 3.2 パラメータ パラメータ θ 移動施設前までの移動時間 昇降時間 待ち時間 肉体的負荷 θ 1 θ 2 θ 3 θ 4 -0.1011 -0.1750 -0.6500 -1.1000 となる.効用を決定するパラメータ θ は, [19] および [4] を参考に決定する.各パラメータ の値を表 3.2 に示す.移動施設前までの移動時間,昇降時間,待ち時間に対するパラメー タは負である.これは,目的地までの所要時間が小さい経路ほど効用が大きいことを表し ており,この符号は適切であるといえる.また,肉](https://thumb-ap.123doks.com/thumbv2/123deta/7158570.2363343/37.892.202.679.191.297/パラメータパラメータパラメータパラメータに対するパラメー.webp)