1.は じ め に ヘビ型ロボットとは,通常,ヘビのように細長い体幹 を持ち柔軟にその形状を能動的に変形可能な機能体のこ とを指す。 Fig. 1(a) (b)はヘビが枝から枝に移動する際の動作の様 子を示している。図 (a) で,ヘビはまず元の枝に体幹を絡 ませることによりしっかりと枝を掴むという「手」に相 当する機能を果たしている。さらに図 (b) では,頭部側の 体幹を「腕」のように伸ばすことで目的の枝に接近して いる。また Fig. 1(c) はヘビがほふく滑走している様子を 示しているが,このときヘビは体幹全体をくねらせるこ とにより移動のための「足」に相当する機能を果たして いる。このように,一本の紐のように単純な形態のヘビ が,必要に応じてその体幹を巧みに利用することで,物 を掴むときには「手」として,枝渡りのときには「腕」 として,移動するときには「足」として,様々な機能を 示していることがわかる。つまり,ヘビ型ロボットは単 純な形態ながら汎用的な機能を発揮する機械システムに なりうると考えられる。 本稿ではこのような特徴を有するヘビ型ロボットに関 するこれまでの研究動向及び今後の展望について述べる。 2.「足」としてのヘビ型ロボット ヘビ型ロボットの大きな特徴の一つはその移動様式で ある。そこでここでは「足」,つまり移動機械としての ヘビ型ロボットに注目し,移動ロボットの代表的な形態 である車輪型・クローラ型,歩行型と比べながらそれぞ れ特徴を述べる。 2.1 車輪型・クローラ型 車輪型は自動車に代表されるように車輪によって移動 する形態であり,クローラ型は建設機械に代表されるよ
ヘビ型ロボットの研究動向
大 野 英 隆 *
A Survey on Trends of Snake-like Robots
Hidetaka OHNO*
A snake-like robot has a long and slender trunk like a snake, and is the functional object which can change actively about the form flexibly. Such a robot is considered that it may become the mechanical system which demonstrates a function general-purpose with a simple form. This paper describes the old research trend about the snake type robot which has such a feature, and a future view.
Key words: snake-like robot, articulated vehicle
Vol. 38, No. 1, 2004
*機械システム工学科 講師
うに動輪と転輪の間に架けられた履帯(ベルト)により 移動する形態である。車輪型・クローラ型の主な特徴を 以下に示す。 ・平らな路面なら最も効率良く移動できる。 車輪型の場合モータやエンジンが最も力を出す必 要があるのは加速するときだけで,一定速度で走行 しているときには小さな力しか必要としないのが一 般的である。また,クローラ型の場合でも履帯と接 地面との摩擦によるエネルギ損失がある分車輪型よ り効率が劣るが,歩行型やヘビ型に比べると効率が 良いのが一般的である。 ・シンプルなメカニズムで構成できる。 車輪型の場合,基本的に前後進用とステアリング 用との 2 個のアクチュエータ(モータなどの駆動装 置)で構成でき,クローラ型の場合も左右の履帯に 計 2 個のアクチュエータを配置すれば,クローラの 速度差により前後進,超芯地旋回を含むステアリン グが可能となる。 ・実用化・商品化されているものもある。 上記の理由からシステムの信頼性が高く,メンテ ナンスも容易であるため屋内や極限環境下での運用 を中心にすでに幾つも実用化・商品化されている実 績がある。 ・凹凸の激しい路面の移動はあまり得意ではない。 車輪型は基本的に車輪の半径以上の高さのある段 差乗り越えが困難である。また,クローラ型は車輪 型に比べるとはるかに不整地に対する走行性能に優 れているが,クローラ単体による移動性能には限界 がある。 2.2 歩行型 歩行型は最近のヒューマノイドロボットやペット型ロ ボットに代表されるような足で移動する形態である。以 下に歩行型の主な特徴を示す。 ・離散的な接地場所が選択可能。 歩行型の大きな特徴は,足の可動範囲内の任意の 位置に足先を接地することができることである。こ の特徴により,たとえば壊れやすい障害物(工場内 の配管・配線や家屋内の段差など)を乗り越える状 況を考えると,車輪型やクローラ型の場合では障害 物を車輪やクローラで踏みつけることになってしま うが,歩行型では跨ぎ超えることで傷つけることな く移動できる。また,歩行型が全方向移動やその場 旋回を移動環境を傷つけることなく実現できるのも, この特徴によるものである。 ・機構と制御が複雑になりがち。 たとえば 4 足や 6 足の歩行ロボットの場合,一般 的に足先の位置(前後,上下,左右)を決めるため に各足に 3 個のアクチュエータが必要となる。2 足 の場合には通常さらに足先の 3 次元的な姿勢を決定 するため各足に合計 6 個のアクチュエータが必要と なる。このように多くのアクチュエータから構成さ れるシステムであるため,適切な駆動系の設計をし ないと立つことすら困難なロボットになってしまう。 また,歩行型の場合ロボット全体の重心位置が高く なるため,足の運び方を環境に応じて慎重に制御し ないと不安定になり転倒してしまう恐れがありその 衝撃も大きい。 ・移動の効率があまり良くない。 多くの歩行型ロボットは,静止して立ってるだけ でもその姿勢を維持するためにアクチュエータでエ ネルギを消費するので車輪型やクローラ型に比べて 効率は劣ってしまう。 2.3 ヘビ型 ヘビ型はその細長い体幹全体をくねらすことで移動す る形態である。以下にヘビ型の主な特徴を示す。 ・体長に対して小さな体幹断面。 ヘビ型の大きな特徴はその体幹の断面積が体幹全 長に対して非常に小さいことである。この特長によ り溝,穴,管内などの狭隘で曲がりくねった通路を 移動することが出来る。また,凹凸が激しい不整地 でもその体幹を柔軟に変形させ適応することが可能 である (Fig. 2(a))。 ・体長に対して小さな重量。 ヘビ型は体長のわりに自重が小さく体幹全体に自 重を分散できるため,たとえば足裏に自重のすべて が集中してしまう歩行型に比べ,砂漠などの軟弱地 を安定して移動するのに適している (Fig. 2(b))。 ・ユニット化された体幹構成。 ヘビ型は一般的に細長く柔軟な運動を実現するた めに最も多くのアクチュエータを必要とする移動形 態であるが,能動関節としてユニット化された単位 節を直列に連結することで構成できるので体幹の分 離・合体が容易となる。このため節に故障が生じた 場合も簡単に対応することが出来る (Fig. 2(c))。 ・移動の効率はあまり良くない。 車輪型やクローラ型に比べると,はるかに多くの
アクチュエータを移動のために駆動する必要がある ため効率は多少劣ってしまう。 以上,ここでは移動機構の代表的な形態である車輪 型・クローラ型,歩行型,ヘビ型のそれぞれについて特 徴を述べたが,各移動形態の採用は明確に区別されるも のではなく,実際は目的に応じて,それぞれの特徴を巧 く融合させた高い移動性能を有する機構が多く研究開発 されている。 3.開 発 事 例 ここでは,これまで世界中で開発されてきた多種多様 なヘビ型ロボットの中から代表的なモデルについて紹介 する。 3.1 ACM-III Fig. 3に示すロボットは,1972 年に東京工業大学の広 瀬らにより世界で初めてヘビの滑走原理を人工物で実現 されたヘビ型ロボット ACM-III(Active Cord Mechanism III, 索状能動体三号機)」である1)–3) 。ACM-III の研究はそ れまで定量的な考察がほとんどされていなかった「ヘビ はなぜ足が無いのに移動できるのか?」という疑問から 始まった。研究室では Fig. 4 に示すように本物のヘビを 用いて筋肉の作用や接地の様子などについて調査が行わ れ,その結果,ヘビの体には「体幹の接線方向には滑り やすいが,法線方向には滑りにくい」という特性がある ことを発見し,スキーやスケートと同じような仕組みで 移動していることがわかった。 そこで ACM-III では,Fig. 5 に示す受動車輪(キャス ター)を体幹の側面に配置することで同様の摩擦特性を 実現し,この機構により体幹をくねらすことでヘビと同 じほふく滑走を実現した。また体幹のくねらせ方につい ても,生理学的に最も自然な体幹曲線である「サーペノ イド曲線」を導出しており,この曲線を用いて体幹形状 を制御している。さらに ACM-III の側面に接触センサを 配置し障害物の把持・運搬,迷路内移動が当時すでに実 現されている。
Fig. 2. Advantages of snake-like robots.
Fig. 3. ACM-III (Active Cord Mechanism III).
Fig. 4. Experimental investigation of regular creep-ing motion in snakes.
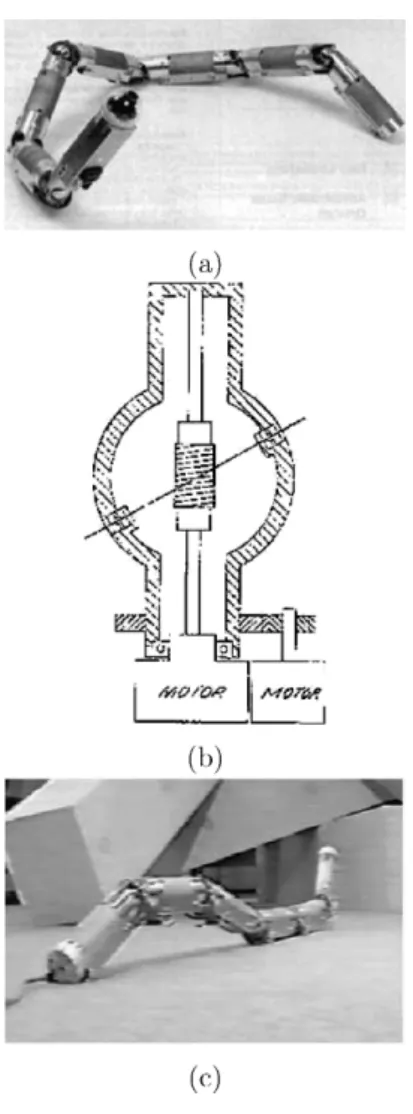
ACM-IIIは 1995 年 に 改 良 さ れ Fig. 6 に 示 す ACM-R1 (完全自立型索状能動体)として現在もヘビ型ロボット の研究に利用されている。ACM-R1 は ACM-III の開発当 時には困難であった電源,制御装置の搭載を実現し,無 線による遠隔操縦で推進速度,方向,くねりの大きさを 制御可能となり配線を引き回す制限を受けることなくそ の移動性能を発揮できるようになった。さらに出力/重 量比が向上した DC モータを採用することで当時の 2 倍 以上の移動速度を出せるようになっている。 3.2 OBLIX Fig. 7は 1981 年に東工大で開発された 3 次元運動可能 なヘビ型ロボット OBLIX である1),3)。ヘビ型ロボットは 立体的にあらゆる方向に変形できることが望ましいが, 当時のアクチュエータは重力に逆らって体幹を変形させ るには出力/重量比,出力/体積比が小さかったため, これを実現するためにはなんらかの工夫が必要であった。 そこで OBLIX では斜旋回機構と呼ぶ機構を導入した。 斜旋回機構とは Fig. 8(c)に示すように体幹軸に対して 傾斜した軸周りに旋回する節と Fig. 8(a) のように同軸旋 回節を交互に連結したものである。立体運動を実現する には同軸旋回節と垂直旋回節を交互に連結するのがシン プルで望ましいが,当時の貧弱なアクチュエータで垂直 旋回節を実現するとたとえば Fig. 8(b) のように外形状が かさばり軽量化も困難になり,関節に大きな負担がか かってしまう。そこで垂直旋回軸に代わり斜旋回軸を用 Fig. 7. OBLIX.
Fig. 8. Mechanism of OBLIX. Fig. 9. Snakey.
いると旋回軸とほぼ同様のサイズで構成でき関節への負 担も軽減できるメリットが得られる。
OBLIXではこの斜旋回機構により 3 次元運動を行い, 能動車輪と組み合わせることで谷渡りを実現している。
3.3 Snakey
Fig. 9(a)は 1992 年米カリフォルニア工科大学の Burdick
らにより開発されたヘビ型ロボット Snakey である6) 。 Snakeyの体幹は直動アクチュエータを多数組み合わせた 細長いトラス構造となっており,体幹側面に Fig. 9(b) に 示すラチェット車輪を配置し各節を伸縮屈曲させること で Fig. 9(c) に示す尺取虫に似た移動を実現している。こ のほかにも Snakey は腕や足としてのヘビ型ロボットの運 動学や運動計画に関する研究に用いられた。 それまでのヘビ型ロボットの研究は日本国内のわずか な研究室だけで行われていたが,このころから海外でも ヘビ型ロボットの持つ特徴に関心が持たれ始めてきた。 3.4 Orochi
Fig. 10(a)は 1996 年に NEC の高梨らによって開発され
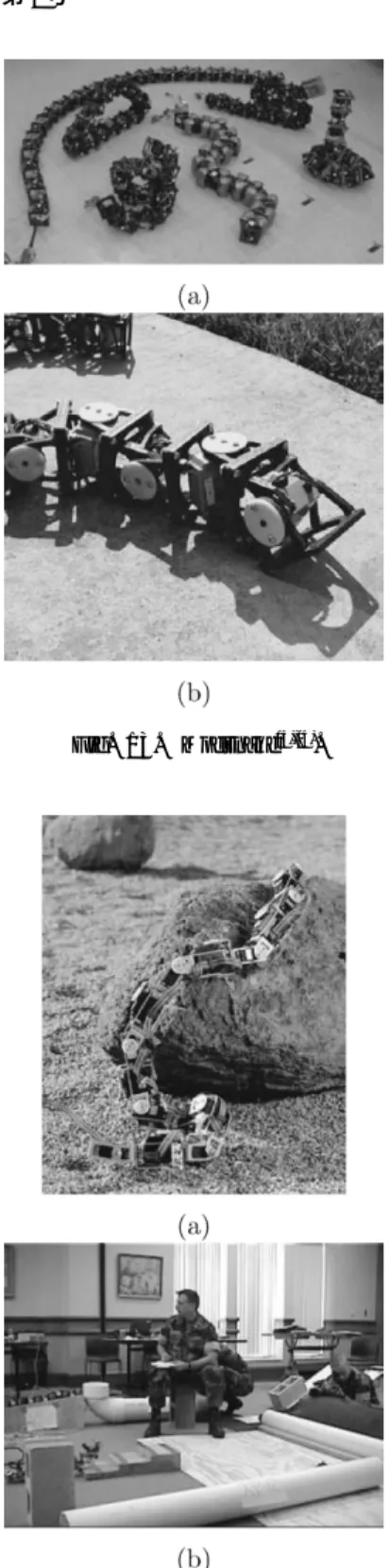
たヘビ型ロボット Orochi である7)。このロボットの特徴 は Fig. 10(b) に示す能動ユニバーサルジョイント8) を新た に開発し大きな可動範囲を実現している点である Orochi は Fig. 10(c) に示すような狭い倒壊家屋内を尺取虫のよう に移動し,先端の小型カメラを用いて生存者を探しだす レスキュー装置として開発された。 3.5 GMD Snake Fig. 11(a)は 1996 年にドイツ国立情報処理研究所 (GMD) の Paap らによって開発されたヘビ型ロボット GMD Snake である9),10) 。GMD Snake はヘビの運動をできるかぎり模 擬することを目的に開発された。このロボットの特徴は 体幹を構成する単位節がワイヤ駆動されている点である。 Fig. 11(b)に示すように,単位節の両端面にはワイヤ用 プーリを駆動するモータが 2 個ずつ配置してあり合計 4 本のワイヤの送り出し量を調節することにより単位節の 立体的な変形を制御している。 3.6 S5
Fig. 12(a)は 1999 年に米国の Miller により開発されたヘ
ビ型ロボット S5 である11),12) 。Miller は専門がコンピュー タグラフィックスの研究者であるが,個人の趣味でロ ボットによる本物のヘビにそっくりの運動を追求してお り,1992 年には 1 号機として S111)を製作している。この ロボットは Fig. 12(b) に示すように,単位節底部の受動車 輪で接地し,搭載したラジコン用サーボモータ 2 個によ り体幹をくねらせて推進力を生成している。各節に充電 池を,頭部に制御装置を搭載することで遠隔操縦されて いる。 このころから出力/重量比の高い小型モータを組み込 んだ比較的安価なラジコン用サーボモータが利用できる ようになり,ヘビ型ロボットをはじめとする多自由度ロ ボットの機構に採用され始めた。 3.7 Modsnake Fig. 13(a)は 1994 からこれまでに米国カーネギーメロン 大 学 (CMU) の ロ ボ テ ィ ク ス 研 究 所 (RI) が 米 航 空 宇 宙 局 (NASA) や米国防総省国防高等研究事業局 (DARPA) と の共同研究で開発してきたヘビ型ロボット Modsnake ファミリーである13)–15) 。Modsnake は基本構造として上 下と左右の屈曲動作にそれぞれ出力/重量比が高いラジ コン用サーボモータを 1 個用いている節(Fig. 13(b) に示 す)を直列に連結した体幹をもち立体的な運動が可能と なっている。NASA ではヘビ型ロボットの特徴に注目し Fig. 13(a)に示すような惑星での探査活動や人工衛星や シャトルのメンテナンスへの応用を検討し開発を進めて Fig. 12. S59),10). Fig. 13. Modsnake14),15).
いた。さらに CMU と NASA の研究成果を受け,DARPA では市街地戦における偵察・監視活動へのヘビ型ロボッ トの応用を検討しており現在も研究が行われている。こ れまでにも,管内移動や垂直溝内移動,クローラ型移動 を実現している。 3.8 Slim Slime Fig. 15(a)は 2000 年に東工大の広瀬らによって開発され たヘビ型ロボット Slim Slime である3),18)。Slim Slime は体 幹を構成する単位節が圧縮空気で駆動される。Fig. 15(b) に示すように単位節は 2 枚の円板間に 120 等配された柔 軟なベローズが配置されており,このベローズ内部の空 気量を調節することで単位節の姿勢を制御できている。 また各ベローズに小型電磁弁を組み込むことで多くの配 管を引き回すことなくスリムな体幹形状を実現できてい る。空気圧駆動の大きなメリットに空気が持つ圧縮性に よるバネ効果がある。これにより配管内の移動などで体 幹を突っ張る際には,モータの場合関節に加わる負荷を 制御する必要があるのに対して,空圧駆動では特に制御 しなくても柔らかく適度にグリップすることが可能とな る。Slim Slime ではほふく滑走,尺取虫移動,管内移動, ピボットターン,捻転運動などを実現している。 3.9 ACM R3 Fig. 16は 2001 年に東工大の広瀬らによって開発された ヘビ型ロボット ACM-R3 である3),19)。ACM-R3 は屈曲動作 に出力/重量比が高いラジコン用サーボモータ 1 個を用 いている節 (Fig. 16(b)) を屈曲軸が直交するように直列接 続した体幹をもち,立体的な運動が可能となっている。 また,体幹にバッテリ及び制御装置を内蔵しており無線 による遠隔操縦が可能となっている。さらに ACM-R3 で は体幹周囲を大型の受動車輪で覆っているため,あらゆ る姿勢で車輪が接地できるため,従来のほふく滑走に加 え,環境に応じた様々な移動様式を実現できているのが 大きな特徴である。 4.期待される分野 2.節で述べた特徴を有するヘビ型ロボットの応用が期 待される主な分野を以下に示す。 ・レスキュー活動 ヘビ型ロボットならば人間の手が届かないような Fig 15. Slim Slime3),18).
倒壊家屋内部でもその細長い体幹を利用してアプ ローチでき,残された生存者の救助を支援すること ができると考えられる。また人間にとって足場の悪 い状況でも,自重を体幹全体に分散して移動するこ とで二次災害を引き起こす危険性も低くできること が期待できる。現在文部科学省では「大都市大震災 軽減化特別プロジェクト」を扱っており,その中で ヘビ型ロボットの応用が検討されている20)。 ・人道的国際貢献 アフガニスタンには 1000 万個の地雷が埋められ ており,これを全部取り除くためには,現在の技術 で数百年の歳月を必要とするといわれている。現在 の除去作業は人間の手作業によるものが主で極めて 危険であり,除去のペースがあげられないのも人間 の緊張状態が長時間継続できないためである。この ような作業を少しでも機械に任せることが出来れば その作業環境は大きく改善できるものと考えられ る。とくにヘビ型ロボットならば草刈の必要な草む らや大型機械の入れない森林でも容易にアプローチ でき,自重を体幹全体で分散することで起爆させる ことなく探知・除去作業でき,たとえ破壊されても 分離・合体が容易なのですぐに修理できることが期 待できる。日本のアフガニスタン復興支援策の 1 つ として,現在科学技術振興事業団で研究領域「人 道的観点からの対人地雷の探知・除去活動を支援 するセンシング技術,アクセス・制御技術の研究開 発」が進められており,この中でもヘビ型ロボット の応用が検討されている22)。 ・メンテナンス 電力やガス,水道をはじめ我々の日常生活を高い 水準で安定して維持するためにはインフラ設備の日 頃のメンテナンスが重要になってくる。しかし高度 に集積化された施設や工場では配管,配線が縦横無 尽に張り巡らされており人間が容易に近づくことの 出来ない状況が少なくない。またガスや水道の配管 の場合,多くが建物内部や地下に埋設されているた め腐食や亀裂の診断は大掛かりなものになる。この ような状況でもヘビ型ロボットならば配管内部にア プローチでき内部の状況を容易に把握することがで きると考えられる。 ・医療 たとえばヒトの大腸は複雑に屈曲し非常に柔らか くデリケートなものである。このような腸内を肛門 から内視鏡を挿入して目的の部位に接近するために は医師に高度な技術が要求され,しかも患者には腹 部に不快な圧迫感を与えてしまう。これは用いられ ている内視鏡が先端部分しか自由に屈曲しないため である。ここで細長く体幹全体を柔軟に変形できる ヘビ型ロボットが利用できれば目的の部位まで患者 に負担を与えることなく挿入することができると考 えられる。 3.節で紹介したように現在ヘビ型ロボットはようやく 多様な移動様式を実現するための移動プラットフォーム が出来つつある段階である。今後,上記のような屋外環 境や人間が近づけない環境での運用を実現するためには, カメラ,マイク,照明などといった各種センサによる多 機能化や,環境に応じた移動様式アルゴリズムや経路計 画アルゴリズムの開発が不可欠である。さらに,極限環 境下でも故障無く運用できるようにするためにハード ウェアに対する信頼性を向上させていくことが必要であ る。 5.おわりに 本稿ではヘビ型ロボットの研究動向として,ヘビ型ロ ボットの特徴を他の移動形態と比較し,これまで開発さ れてきた代表的な事例を紹介し,このようなロボットの 応用が期待される分野について述べた。紙面では各ロ ボットの実際の動きの様子を伝えられないのが残念であ るが,参考文献にあげてある URL の中にはロボットの動 画を公開したり,今回紹介しきれなかった世界のヘビ型 ロボットを集めたリンク集をもつものがあるので興味の ある読者は利用して欲しい。 参 考 文 献 1) 広瀬茂男:“生物機械工学”,工業調査会,1987.
2) Shigeo Hirose: “Biologically Inspired Robots”,Oxford university press,1987.
3) http://www-robot.mes.titech.ac.jp
4) 米田 完,坪内孝司,大隈 久:“はじめてのロ
ボット創造設計”, 講談社サイエンティフィク, 2001.
5) http://www-robot.mes.titec h.ac .jp/staff/yoneda/ yonedaJ.html
6) http://robotics.caltech.edu/
7) NEC Corporation: “Orochi 12DOF Snake Like Robot”, Melville, NY, 1996.
8) H. Ikeda, N. Takanashi: “Joint Assembly Movable Like a Human Arm”, US Patent 4683406, July 28, 1987. As-signee: NEC Corporation.
9) K. L. Paap, M. Dehlwisch, B. Klaassen: “GMDSnake: A Semi-Autonomous Snake-like Robot”, 3rd International Symposium on Distributed Autonomous Robot Systems (DARS 96), October, 29-31, 1996, RIKEN, Saitama, Japan. 10) http://borneo.ais.fraunhofer.de/RS/snake/
11) http://www.snakerobots.com/
12) Gavin Miller: “Snake Robots for Demining?”, The Fifth International Symposium on Technology and the Mine Problem, Monterey, CA, April 22-25, 2002.
13) K. Dowling: “Limbless Locomotion: Learning to Crawl with a Snake Robot”, dissertation, Carnegie Mellon Uni-versity, 1997. 14) http://voronoi.sbp.ri.cmu.edu/projects/modsnake/ modsnake.html 15) http://www2.parc.com/spl/projects/modrobots/polybot/ 16) http://www.nasa.gov 17) http://www.darpa.mil
18) Hidetaka Ohno, Shigeo Hirose: “Design of Slim Slime Robot and its Gait of Locomotion”, Proc. of IROS 01, 2001.
19) Makoto Mori, Shigeo Hirose: “Three-dimensional serpen-tine motion and lateral rolling by Active Cord Mecha-nism ACM-R3”, Proc. of IROS 02, 2002.
20) http://www.rescuesystem.org/
21) http://www.rescuesystem.org/ddt/H14-report/web/ frontpage.html