多重解像度補間メッシュに基づく経路探索手法
6
0
0
全文
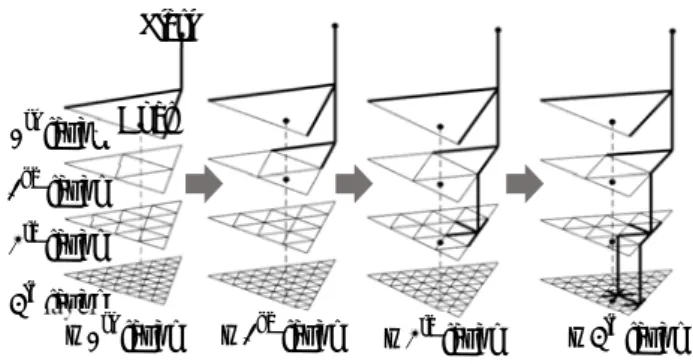
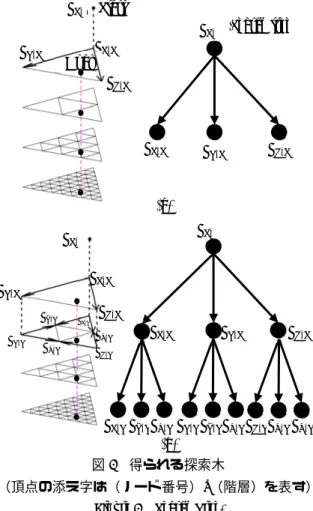
(2) Vol.2017-AL-163 No.6 2017/5/12. 情報処理学会研究報告 IPSJ SIG Technical Report. Add new edges. Add new nodes. Start Goal. st. 1 layer nd. 2 layer. 図2. th. 4 layer st ~ 1 layer 図1 Figure 1. nd. ~ 4 layer. ~ 3 layer. メッシュの高解像度化. Figure 2. th. rd. ~ 2 layer. (c). (b). (a). rd. 3 layer. Addition of Nodes and Edges.. 上記の操作を行ったら,次に生成された各 3 頂点 ∈. を 結 ぶ 辺. 提案アルゴリズムによる探索. ,. Route Search with the Proposed Method.. また実際のネットワークは必ずしもメッシュ構造して いるわけではないため,本研究では与えられたグラフから. ∪. ,. ,. としてグラフ. 2(c)).辺の重みは. ,. ,. ,. を に加える. (図. と同様に. /2とする.以上の操作によって 1 つの三角形. メッシュを生成する手法も併せて提案する.なおメッシュ. を含むグラフから 4 つの三角形を含むグラフが生成される.. 生成には湊らの「Graphillion」[5]を用いた.. 生成された各三角形に対して同様の操作を繰り返し行うこ. 数値実験において提案アルゴリズムが大規模グラフに. とによって含まれる三角形の個数は 4 倍に増加し,解像度. おいても安定した計算速度で動作することを示す.また首. も高くなる.図 3 は異なる解像度のメッシュを縦方向に並. 都圏の鉄道ネットワークからメッシュを生成し,提案アル. べたものである.一番上から順に第 1 層,第 2 層,第3層,. ゴリズムによって高速に探索できることを示す.. 第4層である.各階層間は自己相似関係を有する.. 2. 本研究でのメッシュ 多重解像度補間メッシュは道川ら[4]によって提案され ており,3D モーフィングを実現する補間メッシュを多重解 像度表現したものである.1 つの三角形の面を 4 つの三角. Low-resolution st. ). nd. ). rd. ). th. ). 1 layer (. Self-similar. 形の面に分割することでより高解像度の立体メッシュが得 られる.本研究ではこの部分を用い,図 2 のように頂点お. 2 layer (. よび辺の追加によって 1 つの三角形を含むグラフから 4 つ の三角形を含むグラフを生成する.この操作を繰り返すこ とによって得られるグラフはより高解像度になる.ここで. 3 layer (. は低解像度のグラフから順に第 1 層,第 2 層と呼んでいく. 以下ではメッシュを無向グラフとして頂点,辺の追加操作 を記述する. 1層のグラフを生成す. ここでは第 層のグラフから第. る手順を示す.ここで示す手順は第 層の各三角形に対して なされる.まず図 2(a)のような第 層の三角形のグラフ ,. を与える.辺 の重みは. 重みは共通の値. て着目する.辺 の端点を. ,. ∖. ( ,. ,. ∈. ,. ∈ ,. Figure 3. Relation between Resolution and Layer.. 3. 提案アルゴリズム 提案するアルゴリズムは与えられた三角形のメッシュ. につい. 上における 2 点間の経路上の重みが最小となる経路を探索. )と. するものである.即ち,取り扱う問題は最下位層のグラフ における最短経路の探索問題である.提案アルゴリズムの. を 除 去 (. 探索は多重解像度化されたメッシュにおいて低解像度層か. ∪. らトップダウンに実行される.各階層では「隣接ノードへ. に追加する. 最大 1 回移動するという」ルールに基づき探索を行う.図. ,. を. としてグラフ. 4 は一連の探索手順を示した例である.図の例では始点を. (図 2(b)).. 辺の重みは. High-resolution 図 3 解像度と階層の関係. )する.さらに次の式(1),(2)を満. および辺 ∪. の各辺. よ り 辺. お き , 辺 集 合 たす頂点. 1層のグラフは. とする.生成する第. とする.ここでグラフ. ,. と表記し,各辺の. 4 layer (. ,. (1). 第 0 層目に置いている.一方終点は各層の同位置に置いて. ,. (2). いる.図 4 (a)でまず第 1 層目の探索を行っている.隣接ノ. /2とする.各辺に対して. ードへ最大 1 回移動可能というルールが設けてあるので 0 回移動のノード. ⓒ 2017 Information Processing Society of Japan. _. と 1 回移動のノード. _. ,. _. までの経. 2.
(3) Vol.2017-AL-163 No.6 2017/5/12. 情報処理学会研究報告 IPSJ SIG Technical Report 路が得られる.得られた経路は探索木(Search Tree)として. Step.1 頂点 を葉とする木を探索木 とする.. 保存する.続いて第 2 層目の探索である(図 4 (b)).第 1 層. Step.2 木 の葉に格納されている各頂点 に対して,. とする. 上で. 目までの探索で得られた経路から,引き続き探索を行う.. 隣接する頂点へ移動し,得られた経路を探索木 に保. 探索木で言うと各葉より続けて探索を進めるということで. 存する.また移動せずその場にとどまる経路も含め. ある.図からわかるように,探索する階層が 1 増えるごと. る.得られた各経路の上限値(. に探索木の深さも 1 増える.. をそれぞれ計算する.. ),下限値(. Step.3 得られた各経路について. _ _. Step.4 残った各経路中の. Search tree. 最大値. _. Goal. となった経路を. 探索木 より削除する.. Start. _. ). について最大のものを発見し,. よりも. が大きい経路は探索木よ. り削除する. _. Step.5. なら. が最小の経路 を 1 つ出力して終了,. なら. 1として Step.2 へ移動する.. 入力パラメータのうち最下位層のグラフ _. _. _. と始点 ,終点. は「最短経路問題」として与えられるものであり,その 他のパラメータは提案アルゴリズムにおいて必要なもので あることに注意していただきたい.. (a). Step.3 及び Step.4 では 2 つの条件による枝刈りが実行さ. _. _. れる.以下では分枝限定法を用いるうえで必要となる上限 値及び下限値についてさらに説明をする.. _. 3.1 上限値と下限値. _ _. ここでの上限値. _. _. _. _. _. _. _. は「ルールの下で探索終了層. 探索したときの取りうる最長距離」と定義する.. _. まで は計. 算時点における探索した移動量 と現在の階層より下での. _. ′との和. 探索で取り得る最大移動量. ′で得られる.. ′の計算方法はあらかじめアルゴリズムによって得 _. _. _. _. _. _. _. _. _. (b) 図4. る.しかしすべての経路を列挙しようとするとその数は階 層が進むにつれ指数関数的に増加する.ここでは各階層の. 得られる探索木. (頂点の添え字は(ノード番号)_(階層)を表す) Figure 4. られるすべての経路を列挙するというのが 1 つの方法であ. が. これに従って探索を進めたときの探索経路数は指数関. 1階層の辺の重み. 辺の重みが等しく,第 階層と第. Search Tree.. /. 計算する.各階層での探索は最大 1 回隣接ノードへ移動す. 数的に増大し,探索時間に影響を与える.そこで本研究で. るというルールがあるので,. は探索経路数を削減することを考える.ここでは分枝限定. 項数. 法を用いることで最適解が得られる“見込みがない”探索. 階層を表す.. は初項. 2. りと呼ぶ.枝刈りはある階層を探索したらその時点で探索 中の経路について評価し,実行される.そして残った経路 は引き続き次の階層で探索が行われる.つまり上で述べた. 2. “見込みがない”とはそれ以上探索を続けても最適解が得. 1 2 1 1 2 1 1 2 2 1. (3). られないという意味である.枝刈りする経路の条件はここ. これにより第 層探索終了時の上限値. では 2 つ存在する.二つの条件によって終点まで到達不可. 算される.. 能な経路と,最適解になり得ない経路が枝刈りされる.ア. 2. ルゴリズムの全体的な流れは以下のとおりである. ラフ. ,. ,探索終了層. ,⋯,. ,グ. /2 ,公比1/2,. なる等比級数の和として表される. は現在の. 途中の経路を発見し,以降の探索を中止する.これを枝刈. (入力)始点 ,終点 ,探索開始層. ,. 1/2の関係にあることを用いて数式的に. 一方下限値. 1 2. は次のように計. 1 2. (4). は終点に到達するまでに少なくとも必要. な距離と定義する.. はユークリッド距離を用いて算出. (出力)最短経路. する.そこで各階層のグラフが 2 次元ユークリッド空間上. (手順). に定義されているとする.第 層探索終了時の下限値. ⓒ 2017 Information Processing Society of Japan. は. 3.
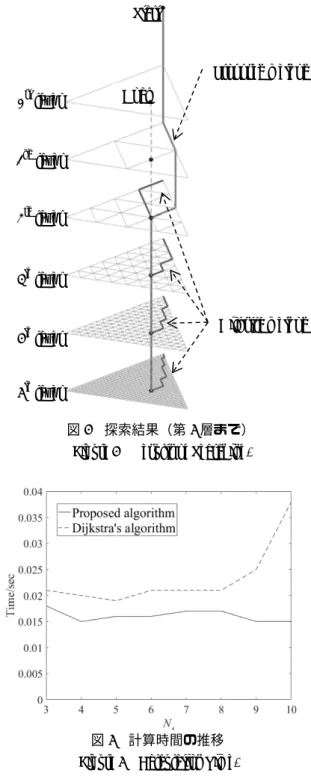
(4) Vol.2017-AL-163 No.6 2017/5/12. 情報処理学会研究報告 IPSJ SIG Technical Report 探索した距離 と探索し終えた地点 から終点 までのユー ,. クリッド距離. を用いて. 図 5 に探索結果を示す.階層間にまたがった経路が提案ア ルゴリズムによって探索された経路,各階層の経路が. ,. (5). Dijkstra 法による経路である.提案アルゴリズムと Dijkstra. と計算する.. 法による最短距離は同じ値であった.2 つのアルゴリズム. 3.2 枝刈り条件. について,計算時間の推移を図 6 に示す.どの. に対して. も提案アルゴリズムの計算時間の方が速い.3. 8の. 上限値及び下限値は各階層で探索を終えたときにそれ ぞれの経路に対して計算する.そしてそれらの値に基づい. 範囲では計算時間の差はおおよそ一定であり,約 0.005 秒. て枝刈りをするが,その条件としては上で述べたように 2. である.しかし. つ存在する.. 9では約 0.01 秒,. 1 つめの枝刈り条件は各経路の上限値. 10では約 0.02 秒の差が生じている.. 提案アルゴリズムは. が上昇しても安定した計算時間で. の場合である.上限値及び下限値の定. 実行されている.図 7 は各階層のグラフにおけるノード数. となった場合はそれ以上探索を行っても. を示す.図 7 からわかるように階層 が 7 を過ぎてから急. について 義より. と下限値. が 8 を超えると,その差は増加する.. そもそも終点に到達不可能である. Start. 1 つめの条件によって枝刈りをしたあと,さらに残った 経路を 2 つめの条件によって枝刈りする.2 つめの枝刈り 条件は残った経路の各. のうちの最大値. よりも. が大きい場合である.この条件によって最小値を取り 得ない経路が枝刈りされる.ただし枝刈り後に残った経路. Proposed method Goal. st. 1 layer. が探索を続けて終点に到達できる保証や最適解を取りうる 保証はないことに注意していただきたい.例えば辺が切れ ている場合がもしあれば終点に到達不可能なことがあるだ. nd. 2 layer. ろう. rd. 3 layer. 4. 提案手法の計算速度性能 提案したアルゴリズムの性能について特に計算速度の 観点から検証をする.比較として Dijkstra 法でもメッシュ. th. 4 layer. 上での探索を行い計算時間の比較を行う.実行環境を表 1 に示す. 表1 Table 1. Experiment Enviroment.. プロセッサ. Intel(R) Core(TM) i7-4900 3.60GHz. メモリ. 8GB. OS. Windows 7 Professional SP1. th. 6 layer 図5. 探索結果(第 6 層まで). Figure 5. Matlab R2016A. プログラム. Dijkstra method. th. 5 layer. 実験環境. Results of Searching.. 環境 Dijkstra 法. Matlab コマンド ”shortestpath”. 実験では第 3 層から第 10 層の同一 2 点間で最短経路を 探索した.そして階層と提案アルゴリズムの計算時間の関 係について調査した.一方比較となる Dijkstra 法でも各階 層で同一地点間の探索を行い,階層と計算時間の関係につ いて調査した.実験の条件を表 2 に示す. 表2 Table 2. 実験条件. Experiment Condition.. 探索開始層. 1. 探索終了層. 3∼10. グラフの詳細. 各階層における辺の重みは均一,階層 間の重みの関係は 8(ただし. /. 2,. は第 層の辺の重み). ⓒ 2017 Information Processing Society of Japan. 図6 Figure 6. 計算時間の推移 Calculation Time.. 4.
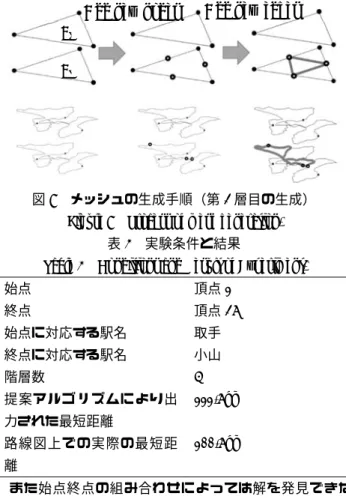
(5) Vol.2017-AL-163 No.6 2017/5/12. 情報処理学会研究報告 IPSJ SIG Technical Report. 図 8 は首都圏の鉄道ネットワークaよりメッシュを生成 する手順を示したものである.上段が生成したメッシュで あり,第 1 層目まで生成した状態,即ち Step.1 が終わった 状態である.生成アルゴリズムではメッシュの各辺上に頂 点を追加し,さらにその頂点間を結ぶ経路を列挙,選択し てメッシュの辺としている.この操作を各三角形に対して 繰り返すことでさらに深い階層を生成していく. 首都圏の鉄道ネットワークより生成したメッシュ上で 最短経路を探索した.表 3 のように始点と終点を指定した. 図 9 は提案アルゴリズムによる探索結果である.計算時間 図7 Figure 7. は 0.018 秒であり,経路長は 111.6km であった.比較とし 各階層の頂点数. Number of each layer’s nodes.. て生成元の鉄道ネットワーク上で同点間の最短経路を Dijkstra 法で探索した.結果は計算時間が 0.028 秒,経路長. 激に頂点数が増加している.このことよりグラフの規模が. は 100.6km となった.厳密解との誤差は約 10%に収めなが. 大きいほど提案アルゴリズムは有効であることがわかる. ら,計算時間は約 35%削減された.図 10 及び図に提案手. 5. 実ネットワークからのメッシュ生成. 法 と Dijkstra 法 に よ っ て 出 力 さ れ た 最 短 経 路 を 示 す .. ここまでで三角形メッシュ上における最短経路探索手 法を提案した.もちろんすべてのネットワークがメッシュ 構造を有しているわけではない.そこで本研究では与えら. Dijkstra 法によって出力された経路はメッシュ上に存在し なかった.生成するメッシュによって得られる最適解が決 まってくるようである.. れた重み付きグラフよりメッシュを生成する手法を併せて. Add new edges. Add new nodes. 提案する.ここでの生成手法は与えられたグラフからメッ シュを構成する辺及び頂点を選択するものである.ここで は探索問題として鉄道ネットワークにおける最短経路問題 を用意し,メッシュ生成したうえで探索アルゴリズムを適 用する. 以下にメッシュの生成手順を示す. (入力)生成元のグラフ ,生成する階層数 (出力)各階層のグラフ. ,. ,・・・, 図8. (手順) Step.1 グラフ 中の最長閉路を 1 つ取り出す.閉路中の 3 頂点をグラフ の頂点,それらを結ぶ各経路を の 辺とする. 1とする.また閉路長の 1/3 を とす る. Step.2 1, とする.グラフ 中の三角形 閉路注をすべて取り出す. Step.3 ある 1 つの三角形閉路に対して三角形の各辺に対応 する生成元グラフ 中の経路から,頂点を選択して 三角形の辺上に追加する.選択基準は分断されてで きる 2 辺の重みができるだけ等しくなることである. Step.4 Step.3 によってできた各 3 頂点間を結ぶ経路を生成 元グラフ から列挙,選択してグラフ の辺とする. 選択基準は経路長が /2 に最も近いものである. Step.5 Step.2 で取り出したすべての三角形に対して Step.3, 4 の操作を行ったら Step.6 へ,そうでなければ Step.3 へ移動する. Step.6 なら生成終了, なら Step.2 へ移動する. 注:グラフ中の 3 辺によって構成される閉路を指す.. メッシュの生成手順(第 2 層目の生成) Figure 8. Process of mesh generation.. 表3 Table 3. 実験条件と結果. Conditions and Result of Experiment.. 始点. 頂点 1. 終点. 頂点 26. 始点に対応する駅名. 取手. 終点に対応する駅名. 小山. 階層数. 4. 提案アルゴリズムにより出. 111.6km. 力された最短距離 路線図上での実際の最短距. 100.6km. 離 また始点終点の組み合わせによっては解を発見できな い場合も存在した.主な原因として上限値,下限値が正し く推定できていないということが挙げられる.今回は各辺. なお Step.4 の経路の列挙には湊らの「Graphillion」[5]を用. の重みが一定と仮定して計算を行ったが,実際には重み一. いた.. 定ではない.メッシュ生成手順 Step.4 の基準距離と実際に. a 駅データ.jp(https://www.ekidata.jp/)より取得した.. ⓒ 2017 Information Processing Society of Japan. 5.
(6) Vol.2017-AL-163 No.6 2017/5/12. 情報処理学会研究報告 IPSJ SIG Technical Report 生成されたメッシュの重みとの誤差は表 4 のようになった. 特に下位層側でばらつきや誤差が目立つ.これらを踏まえ, 上限値,下限値の計算方法やメッシュの生成方法を改善す る必要がある.また別の原因として,そもそもトップダウ ン探索のみでは終点に到達できない始点終点の組み合わせ があるということも挙げられる.終点に到達できないとわ かったときにボトムアップ探索もできるようなアルゴリズ ムを考える必要がある. 表4. メッシュの重み誤差. Table 4 階層. 基準距離 /2. Errors of weights. 標準偏差. 平均値. 最大誤差. 図 11. Δ. 1. 339.1. 339.1. 0.7810. 0.9000. 2. 169.6. 170.4. 2.876. 7.950. 3. 87.78. 91.02. 22.50. 74.03. 4. 42.39. 47.84. 20.55. 119.4. Figure 11. Dijkstra 法による最短経路. A Shortest Path with the Dijkstra Method. 6. まとめと今後 多重解像度補間メッシュ上での最短経路探索アルゴリ ズムを提案した.提案手法では探索,分枝限定法による枝 刈りという手順を階層ごとに行い,最短経路を探索した. 実験結果より提案探索アルゴリズムは大規模な問題であっ. Start. ても計算時間が指数関数的に増大しないことを確認した. Goal. また与えられたグラフより多重解像度補間メッシュを生成 する手法を提案した.多重解像度補間メッシュの生成につ いては経路探索をする上で問題があり,生成手法の改善が 必要である. 現段階ではまだどのようなメッシュ構造ならどの程度 の精度をもって最短経路を出力できるのかといった点が十 分に考察できていない.今後としてはこの点について解明 し,そのうえでメッシュ生成アルゴリズムの改善が必要で ある.またボトムアップ探索を含めたアルゴリズムについ. The source network 図9. ても考えている.これによってトップダウン探索だけでは 得られない経路も得られると期待できる.. 提案アルゴリズムによる最短経路(太線). Figure 9. A Shortest Path with the Proposed Method.. 参考文献 [1]. [2]. [3]. [4]. [5]. 図 10. 提案アルゴリズムによる最短経路(太線,. 丹羽 寿男,吉田 雄二,福村 晃夫:“道路網の階層的表 現にもとづく経路探索アルゴリズムと地図情報システムへの 応用”,情報処理学会論文誌,Vol.31,No.5,1990. Jiang Gangwu, Wang Jing, Chen Bo: “The Shortest Path Algorithm Based on Hierarchical Road Network”, 2006 6th International Conference on ITS Telecommunications Proceedings, 2006. Q. Song and X. Wang: "Efficient Routing on Large Road Networks Using Hierarchical Communities," IEEE Transactions on Intelligent Transportation Systems, vol. 12, no. 1, pp. 132-140, March 2011. 道川隆士,金井崇,藤田 将洋,千代倉 弘明.多重解像度補 間メッシュ.グラフィクスと CAD / Visual Computing 合同 シンポジウム,論文集.pp.139-144,2001. Takeru Inoue, Hiroaki Iwashita, Jun Kawahara, and Shin-ichi Minato: "Graphillion: Software Library Designed for Very Large Sets of Labeled Graphs," International Journal on Software Tools for Technology Transfer, Springe. 真上から見た状態) Figure 10. A Shortest Path with the Proposed Method (Top View).. ⓒ 2017 Information Processing Society of Japan. 6.
(7)
図
+2

関連したドキュメント
Robertson-Seymour の結果により,左図のように disjoint
の dual としてトーラスに埋め込まれた Heawood グラフは.
極大な をすべて に替えることで C-Tutte
〔問4〕通勤経路が二以上ある場合
TCPA Time to Closest Point of Approach の略称.
限られた空間の中に日本人の自然観を凝縮したこの庭では、池を回遊する園路の随所で自然 の造形美に出会
最愛の隣人・中国と、相互理解を深める友愛のこころ
その対策として、図 4.5.3‑1 に示すように、整流器出力と減流回路との間に Zener Diode として、Zener Voltage 100V
