JAIST Repository
https://dspace.jaist.ac.jp/
Title 組織内データセキュリティの定理証明による検証に関
する研究
Author(s) 徳田, 拓
Citation
Issue Date 2006‑03
Type Thesis or Dissertation Text version author
URL http://hdl.handle.net/10119/1988 Rights
Description Supervisor:片山 卓也, 情報科学研究科, 修士
修 士 論 文
組織内データセキュリティの定理証明による検証 に関する研究
北陸先端科学技術大学院大学 情報科学研究科情報システム学専攻
徳田 拓
2006
年3
月修 士 論 文
組織内データセキュリティの定理証明による検証 に関する研究
指導教官
片山 卓也 教授
審査委員主査
片山 卓也 教授
審査委員
二木 厚吉 教授
審査委員
小川 瑞史 特任教授
北陸先端科学技術大学院大学 情報科学研究科情報システム学専攻
410086 徳田 拓
提出年月: 2006年
2
月Copyright c°2006 by Taku Tokuda
目 次
第
1
章 序論1
1.1
情報セキュリティ. . . . 1
1.2
セキュリティポリシー. . . . 2
1.3
セキュリティポリシーモデル. . . . 3
1.4
情報セキュリティの基準. . . . 4
1.4.1 ISO15408 . . . . 4
1.5
本研究の背景と目的. . . . 5
1.5.1
背景. . . . 5
1.5.2
目的. . . . 6
1.6
構成. . . . 6
第
2
章 検証手法8 2.1
形式検証. . . . 8
2.1.1
演繹手法. . . . 8
2.1.2
モデル検査手法. . . . 8
2.2
オブジェクト指向モデルにおける形式検証. . . . 8
2.2.1
オブジェクト指向. . . . 9
2.2.2
オブジェクト指向の性質と検証法の選択. . . . 10
2.2.3
コラボレーションベースの検証法. . . . 10
第
3
章 形式検証までの流れ13 3.1
形式化. . . . 13
3.1.1
形式化とは. . . . 13
3.1.2
形式化モデルに対する検証の必要性. . . . 14
3.2 UML
によるモデル化. . . . 14
3.2.1 UML
によるモデル化の必要性. . . . 14
3.2.2
使用するダイアグラム. . . . 14
3.2.3
オブジェクト指向理論を意識したUML
の記述. . . . 15
3.3
オブジェクト指向理論. . . . 15
3.3.1
クラスモデル. . . . 16
3.3.2
ストアとオブジェクトの型. . . . 17
3.3.3
基本演算子. . . . 17
3.3.4
関数,コラボレーションの記述. . . . 18
3.3.5
公理. . . . 20
3.4 ML
形式,HOL形式での記述. . . . 20
3.4.1 ML
形式化とテスト実行. . . . 21
3.5
証明. . . . 22
3.5.1 HOL
形式化. . . . 22
3.5.2
命題の設定. . . . 23
3.5.3
証明作業. . . . 24
第
4
章 仕様書とモデル化27 4.1 FW
サーバ仕様書. . . . 27
4.1.1
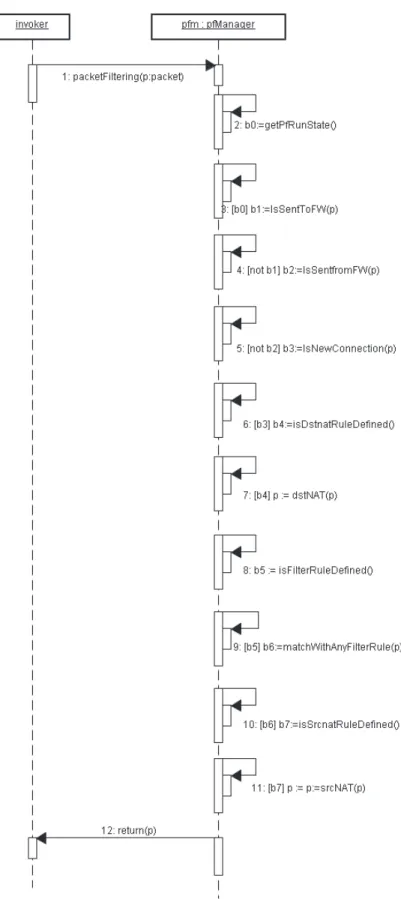
パケットフィルタリングに関するポリシー概要. . . . 27
4.1.2
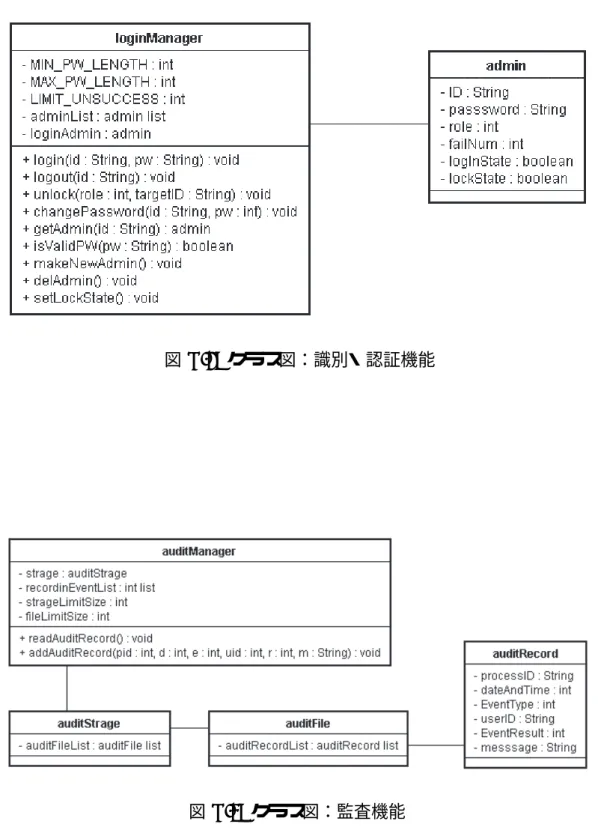
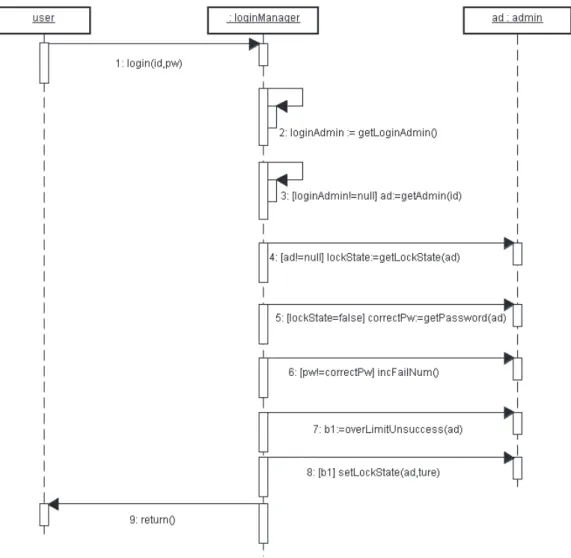
識別と認証に関するポリシー概要. . . . 28
4.1.3
アクセスコントロールに関するポリシー概要. . . . 28
4.1.4
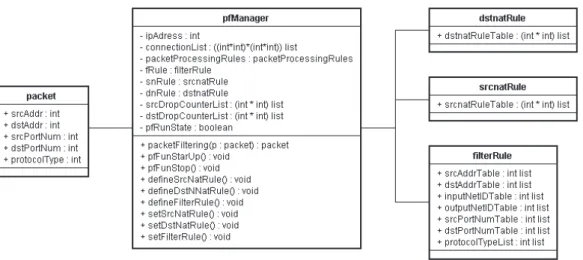
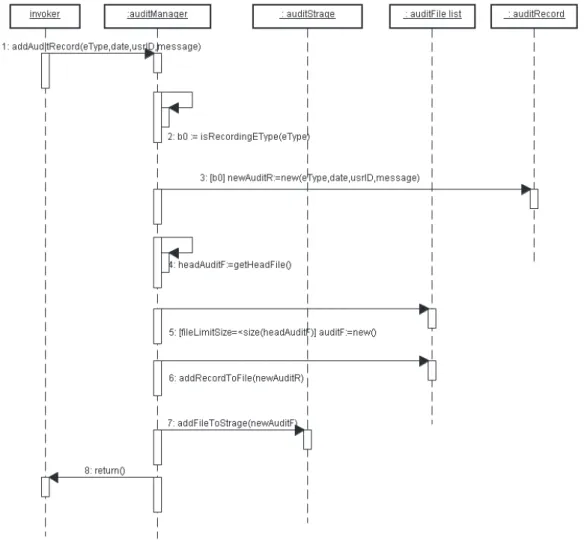
監査に関するポリシー概要. . . . 28
4.2
仕様書の形式化. . . . 29
4.2.1
パケットフィルタリング. . . . 29
4.2.2
識別・認証. . . . 29
4.2.3
監査. . . . 30
4.2.4
アクセスコントロール. . . . 30
4.2.5
時間に関連する機能. . . . 32
4.2.6
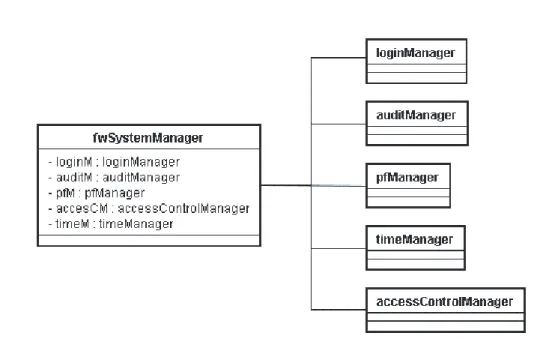
全体の機能. . . . 33
4.3
関数とコラボレーションのML
形式による記述とテスト実行. . . . 33
第
5
章 検証34 5.1
モデルのHOL
形式化. . . . 34
5.2
検証. . . . 35
5.2.1 FW
サーバシステムにおけるコラボレーション. . . . 35
5.2.2
命題の設定. . . . 36
5.3
証明例1
不変表明の証明. . . . 37
5.3.1
帰納段階の証明. . . . 37
5.3.2
初期段階の証明. . . . 39
5.3.3
演繹的性質によるの結論. . . . 39
5.3.4
証明の一般化と他の不変表明. . . . 40
5.4
証明例2
コラボレーション機能の証明. . . . 41
5.4.1
パケットフィルタリングについての仕様書の要求. . . . 41
5.4.2
命題の設定と証明. . . . 41
5.4.3
結論. . . . 43
5.5
証明例3
アクセスコントロールについての証明. . . . 43
5.5.1
アクセスコントロールについての仕様書の要求. . . . 43
5.5.2
アクセスコントロールの実装方法. . . . 44
5.5.3
命題の設定と証明. . . . 44
5.5.4
結論. . . . 45
第
6
章 考察46 6.1
命題の設定について. . . . 46
6.2
証明作業について. . . . 47
第
7
章 まとめ48 7.1
まとめ. . . . 48
7.2
研究の流れ. . . . 48
7.3
今後の課題. . . . 49
付 録
A FW
サーバ仕様書52 A.1
パケットフィルタリングに関するポリシー. . . . 52
A.1.1
概要. . . . 52
A.1.2
ルール. . . . 52
A.2
識別と認証に関するポリシー. . . . 54
A.2.1
概要. . . . 54
A.2.2
ルール. . . . 55
A.3
アクセスコントロールに関するポリシー. . . . 56
A.3.1
概要. . . . 56
A.3.2
ルール. . . . 56
A.4
監査に関するポリシー. . . . 57
A.4.1
概要. . . . 57
A.4.2
ルール. . . . 57
付 録
B FW
サーバシステムUML
図59 B.1
クラス図. . . . 59
B.2
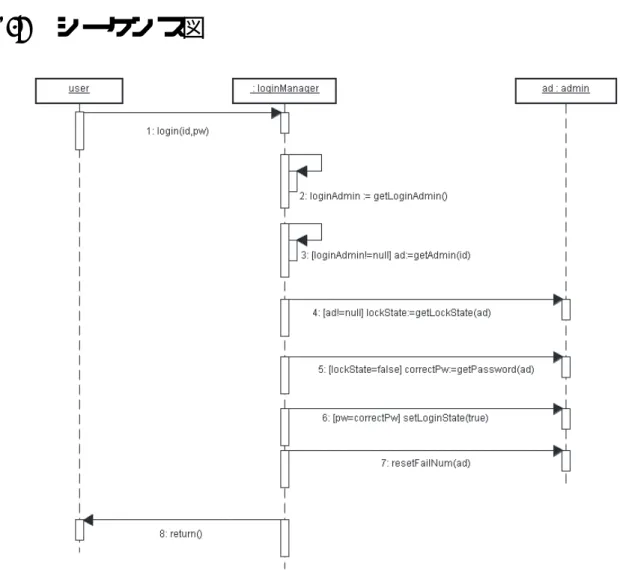
シーケンス図. . . . 62
付 録
C FW
サーバシステムのML
形式、HOL形式による記述67 C.1
クラスモデル. . . . 67
C.2
関数とコラボレーション. . . . 70
付 録
D HOL
による証明例75 D.1 section3.5.3
の証明作業. . . . 75
D.2 section5.3.1
の証明作業. . . . 82
D.2.1
状態に対する述語. . . . 82
D.2.2
帰納段階の証明. . . . 83
D.2.3
初期状態の証明. . . . 84
第 1 章 序論
1.1 情報セキュリティ
情報化社会といわれる現在,柔軟かつ透明であり,安全・安心で高い信頼性を有する
「高信頼性社会」の実現が,経済や社会の基盤として必要不可欠である.
情報セキュリティの目的は,システム内部の操作ミスや敵対的活動などの脅威から,情 報及びシステムを守ることである.情報が水や電気と同じように,経済活動・社会生活の 基盤を支えるインフラストラクチャになった今,企業や生活者が安心して情報を使えるよ うにし,情報の安全を確保することが重要な課題になっている.情報は国家や企業,国民 一人ひとりの財産であるという観点から,その財産を守るために情報を安全に取り扱う ための考え方やルールを設定する必要がある.このような経緯から,情報社会の中で活 動を営むためのルールとして生まれた概念が,情報セキュリティである. それゆえ,情 報セキュリティという言葉に含まれる意味は幅広く,個人情報を中心として企業の機密情 報,個人の著作権など,さまざまな情報に対して生じる取扱責任を指す.具体的には,秘 匿性,完全性および可用性を維持するこという.
秘匿性 秘匿性
(confidentiality)
とは,特定の情報を特定の人間以外に知られないように することである.システム内に格納されたり,通信メッセージに含まれたりした秘 匿すべき情報を,その情報を知ることを許されていない人間による不正な読み出し や,知ることを許された人間による不正な開示からも守らなければならない.完全性 完全性
(integrity)
とは,システムの状態が正しいことを保障することである.情 報やサービスが事前の期待通りの状態であること,誤った更新,不正な更新を受け ていないこと,正しさの保証がない情報を含んでいないことを含む.適用されるシ ステムやコンテキストによって,これらはシステム内の情報が互いにつじつまがあっ ている,システム内の情報が外界の状況を正しく表現している,システム内の情報 やプログラムが不正な改竄を受けていない,システムが権限のないユーザの捜査を 受けていない,システムが誤った入力を受けていない,といった用件に対応する.可用性 可用性とは,使用の権利を持つユーザが,CPU,メモリ,ファイル,装置,情報 などのシステムのリソースやサービスを使用したいときに,実際に使用可能である ことをいう.リソースの喪失,リソースの独占などにより,半永久的,あるいは一 時的にそのリソースが仕様不可能になり,必要に応じた仕様が妨害されないように しなければならない.
1.2 セキュリティポリシー
セキュリティポリシーとは,組織の情報セキュリティ関する基本方針である.セキュリ ティ対策を効率よく,効果的に行うための指針であり,恒久的にセキュリティを維持する ための仕組みを指す.
•
組織のコンピュータやネットワークを不正アクセスなどの脅威から守ること•
利用者・管理者のセキュリティ意識を向上させることなど,ネットワークシステムを含む社内情報システムの運用・利用の指針を,運用管理者 や利用者に伝達,遵守させることを目的としている.また,ネットワークシステムを含む 社内情報システムを円滑に運用するうえでの指針として,「何を」「どのように」「どの程 度」行うのか,セキュリティ対策基準や個別具体的な実施手順などを含む.どの情報を誰 が読み取れるようにするか,どの操作を誰に対して許可するか,どのデータを暗号化する かなど,情報の目的外利用や外部からの侵入,機密漏洩などを防止するための方針を定め たものや,コンピュータウイルス感染によるデータやシステムの破壊や,トラブルによる 情報システムの停止,データの喪失などに対してどう対処していくか,といった項目まで 含める場合もある.
セキュリティポリシーは細かく分類すると以下の
3
つから構成される.•
エグゼクティブ・ポリシー(セキュリティ方針)–
セキュリティ原則に基づく上位のポリシーで,社内規定に準ずる 憲法 のよ うな存在–
組織内のネットワーク/コンピュータシステム,運用実態から独立して規定守 るべきこと(情報漏洩防止やルール厳守など)を記述–
頻繁に更新しない•
ポリシー・スタンダード(セキュリティ運用管理基準または安全対策基準)–
企業リソースからプライオリティの高いリソースを決定–
対策を実施カテゴリごとに分類し,リソースや実態を明記する 法律 のよう な存在組織内のネットワーク/コンピュータシステム,運用実態に則して規定–
上位のポリシーに定められた守るべき情報を実現するための 手段 を記述•
プロシージャ(セキュリティ手順書)–
日々の手順 を記述–
一般社員,管理職,システム管理者,役員など,おのおのに適用される 手順 を規定–
ポリシースタンダードを実践するための具体的な手段セキュリティーポリシーを示すことにより,対外的なイメージや信頼性が向上するといっ たメリットもある.
1.3 セキュリティポリシーモデル
セキュリティポリシーモデルとは,システムが備えるべきセキュリティに関する要件を 明解かつ簡潔に記述したものである
[4].これは,システムのセキュリティを設計する際
に,セキュアなシステムの抽象概念を与えるガイドラインであると同時に,システムのセ キュリティを形式的数理論理的に分析する基点となる.計算機システムのセキュリティは個々の脅威に対する個別の対策の寄せ集めでは達成せ ず,システム全体のセキュリティを統一的に設計した上で構築し,そのセキュリティを評 価すべきである.その際の統一的アプローチの理論的よりどころがセキュリティポリシー モデルである.したがってセキュリティポリシーモデルには,適用システム全体を抽象化 し,セキュリティポリシーを正確に記述でき,システム全体のセキュリティ上の特性の分 析を可能とすることが求められ,さらに構築したシステムがセキュアであることの検証に も利用できることが望ましい.そのためセキュリティポリシーモデルは数理論理学的な記 法で記述することが多く,それによって自然言語による表現に伴う解釈の多様性や暗黙の 了解のような曖昧さを排し,同時にモデルのセキュリティ上の性質の論理的な推論による 証明を可能とする.
セキュリティポリシーモデルの研究の歴史は長い.古くは
1960
年代のタイムシェアリ ングシステムの発展の過程で,米軍の情報管理ポリシーであるマルチレベルセキュリティ のモデル化と,オペレーティングシステム(OS)への実装が進められた.1980 年代には 軍用以外のシステムにおいてもセキュリティポリシーのモデル化が盛んに行われた.会計 システムなどのアプリケーションによるセキュリティポリシーにも目が向けられるように なった.近年は,World Wide Web の普及に象徴されるように,情報処理環境が大きく変化し,
情報セキュリティに対する社会的要求も高度化かつ多様化している.それに伴って,セ キュリティポリシーモデルが表現すべき内容やその記述形態についても多様な要求があ る.そのため,特定のポリシーに特化したモデルだけではなく,多様なポリシーに対応可 能な,表現力の高いモデルの研究が盛んである.大規模分散ミドルウエアなど,設計,構 築にセキュリティポリシーモデルを適用すべきシステムは多い.
セキュリティポリシーモデルはそれぞれ表現能力に特色があり,秘匿性を重視したモデ ル,完全性を重視したモデル,秘匿性と完全性を兼ね備えた複合型モデル,中立型モデル に分類される.代表的なセキュリティポリシーモデルとしては
•
Bell
−LaPadula(Devid Bell&Len Lapadula)
•
Biba Protection(Biba)
•
CMW(John Woodward)
•
Type Enforcement(Earl Boebert&Richard Kain)
•
Role-based Access Control(David Ferraiolo&Richard Kuhn)
•
Chinese Wall(Brewer&Nash)
•
Clark-Wilson(Claerk&Willson)
•
Infomation-Flow
•
BMA
などがある.BMAは英国医学協会が考案した医学倫理の情報流れ制御を定義したモデル だが,これらのセキュリティポリシーモデルのほとんどは,米国国防総省がスポンサーと なって考案を委託したものである.
ただし,近年セキュリティポリシーという言葉の拡大解釈が進んだ結果,セキュリティ ポリシーモデルの定義はあやふやなものとなった.今日では,
ISO15408
の普及に伴い,プ ロテクションプロファイルやセキュリティターゲットなど,新しい用語の追加と再定義が 実施され,システムの保護要件を表す言葉として分類して使われるようになった.1.4 情報セキュリティの基準
セキュリティが要求される情報処理システムの提供者は,消費者からの「本当にセキュ リティは守られているのか?」という問いには答えなければならない.また,システムを 提供者も,システムの開発において同じ質問を自身に問いかけることになる.この問い に答えるための方法を提示したものが情報セキュリティの評価基準である.情報セキュリ ティの評価基準は,各国の国内基準から世界標準まで,多数存在する.
第三者機関による,セキュリティ基準に準じた評価と公的な認証により,IT製品・シ ステムに関する知識が乏しい消費者でも,安心して製品・システムを選択することができ る.また,提供者はセキュリティ設計への不安を取り除き,消費者に対しては,IT製品 のセキュリティ向上に積極的に取り組む企業姿勢を強くアピールでき,製品セキュリティ への信頼と安心を確保できる.
1.4.1 ISO15408
かつては,情報セキュリティの基準に関し各国が独自で基準をもっていたが
(1985
年に アメリカ,1991年にフランス,イギリス,ドイツ,1993年にカナダに制定),1990年か らISO
でそのジャンルの国際標準の作成が進められ,ITセキュリティ評価のコモンクラ イテリア(CC:Common Criteria)
が作られた.CCを元に,1996年6
月に国際標準の情報セキュリティの基準として
ISO15408(ISO/IEC 15408)
が制定された[1].またこれと同時
に,この標準のインポートによる国内標準化が開始され,2000年7
月にはJIS
標準(JISX 5070)として制定さた.両者の規定内容は,同一のものとなっている.
評価・認証の手順
CC
では,多くのコミュニティのニーズに対処することができるIT
セキュリティ基準 のセットを定義している.これらはセキュリティ要件と呼ばれる.また,CCでは,評価 対象のことをTOE(Target of Evaluation)
と呼ぶ.TOEの開発は,まずCC
の用意するセ キュリティ要件を元に,TOEに対するプロテクションプロファイル,セキュリティター ゲットの開発を行う.
プロテクションプロファイル(PP:セキュリティ要件仕様書)とは,
TOE
に対するセキュ リティ要件を記述したものである.具体的なシステムの実装とは依存しない形式で書かれ ており,他の実装で再利用が可能となる.PPは,CCのPP
に対する評価基準に照らし合 わされ,完全で一貫しており,かつ技術的にしっかりしており,TOEに対する要件の記 述として適しているか評価される.そして,PPは合否判定がなされ,合格したPP
は登 録される.
セキュリティターゲット(ST:セキュリティ設計仕様書)とは,評価済みの
PP
を基にし て作成され,TOEの評価に対するセキュリティ要件に加え,設計仕様を記述したもので ある.システムが具体的に備える保護メカニズムとTOE
がどのように結び付けられるか を,ある程度詳細に記述してある.STは,CCのST
に対する評価基準に照らし合わされ,完全で一貫しており,かつ技術的にしっかりしており,TOEに対する要件の記述として 適しているか評価される.そして,STは合否判定がなされ,合格した
ST
は登録される.
以上のステップを踏まえた上で,TOEは,STで記述される内容を具体化し,実装さ れる.
1.5 本研究の背景と目的
1.5.1 背景
現在,情報化社会となり,政府から民間,個人に至るまで情報を扱う様々な活動が盛ん に行われている.そこでは,必ずといっていいほど情報技術が関わるシステムが存在し,
活動を管理・支援している.情報技術が社会生活に及ぼす影響が大きくなり,ますます高 信頼である情報化社会が求められ,それを実現するする様々な技術の研究が行われている.
ソフトウェアの開発では,その問題の多くが分析・設計などの上流工程で作りこまれ,
それが全体の生産性や品質に支配的な影響を及ぼしていることがよく知られている.この ようなエラーを取り除くため,上流工程段階からモデルを形式化し,正しさを確認・検証 しながらシステムの構築を行い,高信頼なソフトウェアの開発を実現しようとする研究が 行われている.
一方,情報セキュリティが重要視される中,IT製品のセキュリティの標準化が行われ てきた.それまでは,ソフトウェアごとにセキュリティ仕様は定めらていた.しかし,こ の状況は開発者は何を実現すればよいか不明瞭であったし,消費者にとっても何が守られ ているか不明瞭であった.この状況に対し,公的機関がセキュリティの標準化を行い,こ れにより,開発者にとっては実装すべきセキュリティ機能が明瞭かさた.また,消費者は 製品の詳細を理解できなくとも,公的機関の標準規格を満たしているということで安心を 得ることができるようになった.現在では,世界標準として
ISO15408
が用いられるよう になった.これから,セキュリティ標準が社会に浸透としていくことは間違いない.この状況の 中,形式検証の対象としセキュリティという概念を扱うことが必要とされる.
1.5.2 目的
システムの開発には,そのシステムが満たすべき機能要求・セキュリティ要求がある.
また,システムの開発過程では,システムの形式モデルを抽象度の高い状態から具体化す ることで実装を行う.この形式モデルは,そのシステムに与えられた機能要求・セキュリ ティ要求を実際に満たしている保証はない.本研究では,高階述語論理
HOL[2]
による定 理証明を用いて,形式モデルが機能要求・セキュリティ要求を満たしているか検証する方 法を提案する.検証により,上流工程の仕様書や形式モデルの機能要求に対する不具合・セキュリティ 要求に対する不具合を発見できる.また,これを取り除くことにより,機能的・セキュリ ティ的に正しいことが論理的に証明された形式化モデルが得られる.
1.6 構成
本研究では,HOLを用いた検証により,形式化されたモデルが,それに対する機能要 求やセキュリティ要求を満たされていることを示す方法と,一連の流れを事例ベースで述 べる.事例として,STに準ずる一般的なファイアーウォール
(FW)
サーバに関する仕様 書を前提とする.まず仕様書に関し,オブジェクト指向での形式化を行い,形式化モデル に対し検証を行う.検証までの流れは以下のようになる.1. FW
サーバシステムのST
に準ずる仕様書を想定する2.
仕様書を元にUML
でモデル化をし,クラス図,コラボレーション図を作る3.
モデル化したものをオブジェクト指向理論を用いてML
でコード化する4. ML
コンパイラを用いて簡単な実行テストし,コード化で起こるようなバグを取り除く
5.
コードをHOL
形式に書き直す6.
仕様書の内容を証明するための,システム上の述語で命題を定義7.
命題の証明第
2
章では,形式化と形式検証について説明する.第3
章では,仕様書のオブジェクト 指向による形式化方法と,UML,ML形式・HOL形式での記述について述べる.第4
章 では,FWサーバのST
を基にした事例について,UMLによるモデル化からHOL
形式に よる記述までについて述べる.第5
章では,4章で得られた形式化モデルに対しおこなっ た検証について述べる.第6
章では考察を行い,第7
章でまとめと今後の課題を述べる.第 2 章 検証手法
2.1 形式検証
高信頼のソフトウェアを開発するために,開発の上流工程において早期に効率よくシス テムの不具合を発見する手段として,形式検証の技術を開発に適用する試みが広がってい る.形式検証はシステムの信頼性向上を目的とする技術であり,計算機支援を前提として 数学的な基礎基づくことを特徴とする. 形式検証は,大きく分けて定理証明による演繹手 法とモデル検査手法がある.
2.1.1 演繹手法
演繹手法では与えられた性質を対象システムが満たすことを論理体系にしたがって証明 する.表現力の高い論理体系を用いると広範なシステムを検証対象にすることができる.
しかし,すべての定理を自動証明することは不可能であることがわかっている.このた め,定理証明支援系の場合,人が証明の途中結果を理解した上で,帰納法などのルールを 選択する必要がでてくる.演繹手法による検証方法では,対象が誤りを含む場合,対象記 述のどこに誤りがあるかを見つけることが難しい.
2.1.2 モデル検査手法
モデル検査技法では対象を有限の状態空間で表現できるシステムに限定する.有限であ ることから状態の網羅的な探索が可能であり,自動検証が可能となっている.モデル検査 技法では,対象が誤りを含む場合,網羅的な探索を行うことから反例を見つけることがで きる.
2.2 オブジェクト指向モデルにおける形式検証
現在,オブジェクト指向によるソフトウェアの開発が主流であり,本研究の検証対象で ある
FW
サーバシステムについても,オブジェクト指向によるモデル化と,オブジェクト 指向に即した検証を行う.ここでは,まずオブジェクト指向は何かということを述べる.次に,本研究で用いる検証法について述べる.
2.2.1 オブジェクト指向
オブジェクト指向はソフトウェアの開発技術の
1
つで,その名前が示すとおり「オブ ジェクト」という単位ですべてをとらえる考え方である.•
システム化対象となるビジネスをオブジェクト間のコミュニケーションとして考える•
システムをオブジェクトの集合ととらえる•
オブジェクトの振る舞いをプログラムで記述するというようにあらゆる事象をオブジェクトとして考えていくのがオブジェクト指向であ る.オブジェクト指向は,大規模・複雑化するソフトウェア開発において開発効率を向上 させる技術として注目されている.
オブジェクト指向によるシステム開発では,
•
オブジェクト群がどのような構造を持っているのか•
オブジェクトの間でどのようなメッセージが交わされるのかなど,さまざまな視点からオブジェクトをとらえる.これらは,図(ダイアグラム)を 使って表される.こうした図のことをモデルという.モデルを用いることで,技術者間で より正確にオブジェクトに関する情報や考えを交換することが可能となる.これは,街を 地図に表すことによって,特定の建物や場所の位置,あるいは標高といった情報が皆で共 有できる情報として扱えるようになる様と似ている.しかし,モデルを正確に読み取るた めには,モデルの描き方のルールを定める必要がある.そうしたモデルの描き方のルール を定めたものを表記法という.
以前は,オブジェクト指向の世界には,OMT法や
Booch
法といったオブジェクト指向 を使ったシステム開発のための方法論が乱立し,それぞれで独自の表記法を作っていた ため,多くのの表記法が存在した.そのような状況では,同じ「クラスの構造を表すモデ ル」を描くための表記法が何通りも存在し,方法論が変わるたびに,別の表記法を用いな ければならなかった.また,異なるエンジニアの間で情報交換をする際も,表記法が違な るためにモデルが理解できず,スムーズな情報交換ができないという問題もあった.そこで乱立する表記法を統一するために作られたのが
UML(Unified Modeling Language)
である.Unified(統一)という言葉の由来はそこから来ている.UMLはオブジェクト指 向によるシステム開発で用いられるさまざまなモデルの表記法を標準化していき,1997 年にOMG(Object Management Group:オブジェクト指向技術の標準化団体)の標準と
なった.以後,オブジェクト指向業界での表記法のデファクトスタンダードとして用いら れるようになった.2.2.2 オブジェクト指向の性質と検証法の選択
オブジェクト指向モデルでは,システムは複数のオブジェクトから構成され,それらの 協調動作により,システム全体としての機能が実現される.これを状態遷移に基づく形式 化により各オブジェクトの状態を状態遷移で表す場合,協調動作を検証するためには複数 のオブジェクトの状態遷移図を合成する必要があり,状態爆発が起こる可能性がある.本 研究の検証対象は,STなどの仕様書で記述される様なシステムであり,このようなシス テムでは,多数のオブジェクトが存在することが予想され,状態遷移に基づいたモデル化 は困難であると場合が多いと考えられる.
これに対し,矢竹ら
[3]
はコラボレーションに基づくオブジェクト指向モデルの検証法 を提案し,オブジェクト指向理論を定理証明システムHOL
上の論理モジュールとして定 義した.オブジェクト指向理論では,システムの状態はひとつのデータ型として表現さ れ,コラボレーションは,その上の関数適用列として表現される.これにより,システム の無限の状態を1
つと扱うことができ,任意数のオブジェクトに対応することが可能とな る.また,コラボレーションベースの検証法では,メソッド呼び出しという,オブジェク ト間の協調動作を直接捉える視点でシステムの振舞いを定義できるため,段階的振舞いに よる近似法のように,合成された状態遷移図から協調動作に代わる状態遷移図を抜き出す オーバーヘッドがなくなる.以上の理由より,複数オブジェクトを扱うことを想定している本研究では,検証手法と して矢竹らが提案したオブジェクト指向理論を用いて,HOL上において定理証明による 検証を用いることにした.
2.2.3 コラボレーションベースの検証法
ここでは,本研究が扱うコラボレーションの定義を確認し,コラボレーションベースの 検証法について説明する.
コラボレーション
コラボレーションとは,システムのまとまった機能を実現する複数オブジェクト間の協 調動作である.システムのまとまった機能とは,オブジェクト間のメソッド呼び出しを複 数個組み合わせて実現される.
本研究が対象とするコラボレーションは,演繹的証明において,システムの評価対象と なる状態から,次の評価対象となる状態までの遷移を実現する関数列である.例えば,対 話型のシステムの場合,ユーザがコマンドを打ち込んでから,次にシステムがコマンドを 受け付けることができる状態になるまでの,システムの一連の動作がコラボレーションに あたる.
䉮䊙䊮䊄 ฃઃน⢻
䉮䊙䊮䊄 ฃઃਇน⢻
䉮䊙䊮䊄 ฃઃਇน⢻
㪸
㪹 㪺
図
2.1:
対話型システムの関数列とコラボレーションの関係図
2.1
はこれをモデル化したものである.a
,b
,c
は状態の遷移を引き起こす個別の関 数とする.ここで,コマンド入力可能状態から,次のコマンド入力可能状態への遷移は,関数列
abc
によってのみ実現される.関数列abcabc
もコマンド入力可能状態から,コマ ンド入力可能状態への遷移ではあるが,途中で評価対象となる状態を通過しているため,演繹証明の帰納段階とするのは不適切である.
システムには複数のコラボレーションが存在し,それらが繰り返し適用されることによ りシステムは状態変化する.
演繹的手法による証明
オブジェクト指向におけるコラボレーションベースの定理証明について説明する.コラ ボレーションとは,システムのまとまった機能を実現するオブジェクト間の協調動作であ る.一般に,システムには複数のコラボレーションが存在し,それらが繰り返し適用され ることによりシステムは状態変化する.すなわち,システムは次の
2
つの組で定義される.System = (S, F )
S
はシステムのとりうる状態の集合であり,初期状態s
0を含む.F
はコラボレーション の有限集合であり,各コラボレーションは状態を変化させる関数f : S → S
である.1コラボレーションの平行性は考慮しない.つまり,それぞれのコラボレーションはアト ミックに適用され,インターリーブすることはない.
前提となる状態に対する
S
上述語P
assumption,結果となる状態に対するS
上述語P
conclusion とすると,P
assumption(s) ⇒ P
conclusion(f (s)) (f ∈ F )
により,コラボレーション前後の状態に対する命題が与えられる.1f はf :int→S→string∗S のように入出力を伴うことがある.ここでは簡単のため,入出力がない 場合の定式化を示す.
特に,Passumption
= P
conclusionの場合,一般にこれを不変表明といい,システム上で常 に成り立つ性質を述べるために使われる.不変表明の証明は,初期状態からの遷移列に関 する帰納法を用いる.•
初期段階P (s
0)
•
帰納段階P (s) ⇒ P (f (s)) (f ∈ F )
初期段階・帰納段階を示すことで,不変表明が常に成り立つことを演繹的に証明できる.
第 3 章 形式検証までの流れ
本章では,自然言語の仕様書から形式化を行い,HOLによる定理証明を行う段階まで について述べる.全体の流れは
1. UML
のクラス図,コラボレーション図による,オブジェクト指向モデルの作成2.
オブジェクト指向理論の論理モジュールを生成3.
オブジェクト指向理論を用いたML
によるモデルのコード化4. ML
形式での実行テスト5. ML
形式による記述をHOL
形式に変換6. HOL
による証明となる.
3.1 形式化
3.1.1 形式化とは
一般にソフトウェア開発の過程では,自然言語で記述されるような仕様書から,形式化 を行う.抽象度の高い形式化された設計記述から設計記述の詳細化・細分化を行い,最終 的にコード化し実装に至る.抽象度の高いモデル化では以下の
2
点に注意しなければなら ない.•
各詳細化のレベルは,上位レベルの完全な具体化であること(すなわち,より高い 抽象度で定義されたすべてのセキュリティ機能,特性,及びふるまいが,下位レベ ルにおいて実証的に提示されていなければならない)•
各詳細化のレベルは,上位レベルの正確な具体化であること(すなわち,上位レベ ルにおいて必要のないセキュリティ機能,特性,及びふるまいが,より低い抽象度 で定義されるべきでない)また,そこから実行テスト,統合テストと繰り返し完成となる.この抽象度の高い過程は 上流過程,コードに近い過程を下流過程と呼ばれる.形式検証とは,実装段階のコードに よるシュミレーションではなく,抽象度の高い段階でのモデルに対し,モデル検査や定理 証明によって検証を行うことである.
3.1.2 形式化モデルに対する検証の必要性
本研究では,ST程度の仕様書が前以って与えられていることを想定している.STは,
実装に依存しない形式である
PP
に実装に依存する情報を追加したものである.ST
は,機 能要求・セキュリティ要求について,自然言語や図表などにより非形式的な形で記述され たものである.開発者は,STや
ST
を更に詳細化した仕様書に基づき,形式モデルを作ることになる.ここで作り出される形式化モデルは,開発者が非形式的な仕様書の内容を満たすように,
創作したものであるが,そのモデルが仕様書の機能要求やセキュリティ要求を満たしてい る保証はない.そのため,作り出されたモデルが機能要求やセキュリティ要求を満たして いるかを検証する必要がでてくる.
3.2 UML によるモデル化
3.2.1 UML によるモデル化の必要性
上位レベルでの設計記述は,開発工程全体で参照されるセキュリティ機能,特性,及び ふるまいを明確に理解しやすく示す必要がある.本研究で用いる,オブジェクト指向理論
による
ML(または HOL)
形式による記述でも,抽象度の高い設計記述は可能である.しかし,ML形式で書かれた設計記述はコードに近い記述であり,開発に携わる者すべてに とり明確にわかり易く記述されたモデルであるとは言い難い.これには,現在最も一般的 に用いられている
UML
による記述が適している.検証は,UMLで示された設計記述を,オブジェクト指向理論による
HOL
形式に忠実 に変換し,検証を行う.これにより,機能要求・セキュリティ要求を満たすUML
モデル が得られることになる.3.2.2 使用するダイアグラム
UML
は9
種類のダイアグラムからなっており,用途に合わせ,それらを組み合わせて 用いる.本研究では,UMLのダイアグラムとしてクラス図とシーケンス図,コラボレー ション図を用いる.クラス図はシステムの静的構造を表すものであり,様々な種類のクラス
(タイプ)
とそれらのクラス間の関係(リレーションシップ)
で構成されている.クラス図はオブジェクト指向分析・設計において最も重要なダイアグラムであり,オブジェクト
指向分析・設計の根幹をなす.シーケンス図・コラボレーション図は,複数のオブジェク トにまたがる協調動作を記述する動的モデルである.シーケンス図は時間に焦点をおき,
コラボレーション図は空間に焦点を置いているが,基本的に表現できることは同じである.
HOL
による検証では,システムのオブジェクト間の協調動作による状態の変化につい ての,演繹的な証明によっておこなう.よって,協調動作するオブジェクトを定義するク ラス図と,演繹的証明に用いるための,状態の変化をもたらすコラボレーションを記述し たシーケンス図(コラボレーション図)を作る必要がある.3.2.3 オブジェクト指向理論を意識した UML の記述
UML
によるモデル化が完成すると,次のステップとして,オブジェクト指向理論を用 いた,ML形式・HOL形式への変換を行う.これを念頭に置き,クラス図の属性値名や 操作名,コラボレーション図のオブジェクト間のメッセージ通信における関数名,引数,返り値,ガード条件などは,ML形式で共通で使う名称・形式が望ましい.
また,1つのコラボレーションは複数の操作のまとまった機能であるが,それを構成す る操作もまた,複数の操作のまとまった機能である場合がある.これらの操作に対して も,その内容についてのコラボレーション図を描いておくことが望ましい.ただし,すべ ての操作を詳細化しコラボレーション図を書くのは,非常に労力がかかるため,内容を記 述する必要のないような自明な操作についての記述は省いてよい.コラボレーション図を 書く段階で,ある程度具体化をしておくと,HOL上での記述への変換がスムーズに行う ことができる.
3.3 オブジェクト指向理論
矢竹ら
[3]
は,オブジェクト間の協調動作による状態の変化についての,演繹的な証明を おこなうためのシステムを実現するための土台として,オブジェクト指向理論をHOL[2]
に定義した.HOLでは,システム状態はストアと呼ばれるデータ型で表現する.ストア は,直感的にはシステムに存在するすべてのデータを保持する環境であり,その上にオブ ジェクトを操作するためのいくつかの基本演算子が定義される.コラボレーション,およ び,証明する命題は,これらの基本演算子と
HOL
の理論ライブラリが提供する関数群を 用いて定義される関数,述語である.検証の流れとしては,まず,ユーザはシステムのクラスモデルを定義する.クラスモデ ルは
UML
のクラス図のように,システムの静的構造を定義するモデルである.具体的に は,クラス名,属性名とその型,継承関係を定義する.クラスモデルは,特定の形式で ファイルに宣言され,理論生成機に入力される.理論生成機とは,矢竹らがHOL
のメタ 言語であるMoscow ML [2]
で実装したツールであり,対象システムのクラスモデルに基づ き,そのシステムの特化した理論をHOL
理論モジュールとして構築する.理論モジュー ルとは,HOLにおけるここの理論の単位であり,型,定数,公理,および定理を格納する
ML
ストラクチャである.構築はDefinitional Extention
に従う.つまり,自然数やリ ストといったHOL
の既存理論を,定義の導入のみにより拡張し,それらに関する定理を 既存の推論規則によって証明する.これはHOL
において健全な理論を構築する基本的な 手法である.ユーザはこの理論に与えられる基本演算子とHOL
が提供する関数郡を用い て,コラボレーション,および不変表明を,システムの初期状態からの遷移列に関する帰 納法により証明する.3.3.1 クラスモデル
クラスモデルは,システムの静的構造を定義する.具体的には,クラス名,属性名とそ の型,継承関係を定義する.定義に先立ち,型の集合
T ype
を導入する.T ypeの要素は,HOL
における,各変数を含まない任意の型である.クラスモデルは,以下の
5
つの組として定義される.CM = (C, A, M
attr, M
inher, T )
• M
attr: C → P ow(A)
• M
inher: C → P ow(C)
• T : C × A → T ype
C,A
はそれぞれ,システムに出現するクラス名の集合,属性名の集合である.Mattr は,クラスと,その属性集合を対応付ける写像である.Minherは,クラスと,その子クラ ス集合を対応付ける写像である.現在のところ,継承関係は,単一継承のみサポートして いる.T は,クラスと属性に対し,その属性の型を対応付けている写像である.C⊂ T
と し,クラス名をそのクラスに属するオブジェクトの型とする.理論生成機に入力される,ファイルには,クラス名と属性名,属性名の型,属性の初期 値を記述する.属性名の型,属性の初期値は
HOL
型とML
型の両方記述しておく.ファ イルを理論生成機に入力すると,HOLの理論モジュールが出力され,理論モジュールを 読み込むことで,クラスモデルに特化したオブジェクト指向理論をHOL
上で使用できる.クラスモデルを定義するファイルのフォーマットは以下のようになる.
class (1)
attr (2) holtype : (3) | (4) mltype : (5) | (6)
• (1):クラス名
• (2):属性名
• (3):属性の HOL
形式の型• (4):属性の HOL
形式の初期値• (5):属性の ML
形式の型• (6):属性の ML
形式の初期値具体例として,
2
次元座標上の位置を表すクラスperson
があるとする.クラスposition
は,属性としてint
型のx
座標を表すx,int
型のy
座標を表すy
を持つ.x,yはそれぞれ 初期値0,1
を持つとする.このときのクラスモデルを定義するファイルの記述は以下の ようになる.class person
attr x holtype : num | 0 mltype : int | 0 attr y holtype : num | 1 mltype : int | 1
ML
形式とHOL
では,型の表記が多少異なる.HOLではint
型は無いため,num型と する.また,ペアの表記も異なり,int型のペアはML
形式ではint * int
,HOL形式で はnum # num
となる.また,bool型の定数はML
形式ではtrue false
となるが,HOL 形式ではT F
となる.3.3.2 ストアとオブジェクトの型
変数,定数の型として,bool,num,string,listなど,HOLの既存理論で提供される ものに加え,オブジェクト指向理論では,ストアやオブジェクトについての型が与えら れる.
ストアは,型
store
として定義される.storeは定数としてstore emp
をもつ.これは,どのクラスのオブジェクトも生成されていない,空のストアを表す.
クラス
c ∈ C (C
はシステムに出現するクラス名の集合)に属するオブジェクトは,型c
をもつ.各c
は,定数としてc null
をもつ.これは,そのクラスのNULL
オブジェクト を表す.NULLオブジェクトはストアには存在しない.3.3.3 基本演算子
オブジェクト指向理論では,6種類の基本演算子がストア上に定義される.
new
演算子 ストアに新たなオブジェクトを生成する関数is
演算子 オブジェクトが特定のクラスのインスタンスであるかを検査する述語ex
演算子 オブジェクトがストアに存在するかを検査する述語cast
演算子 オブジェクトの方変換を行う述語get
演算子 オブジェクトの属性値を取得する関数set
演算子 オブジェクトの属性値を更新する述語これらの演算子は以下のように定義される.
• c new : store → c ∗ store (c ∈ C)
• c is d : c → store → bool (c, d ∈ C, c ¢
∗d)
• c ex : c → store → bool (c ∈ C)
• c cast a : c → store → d (c, d ∈ C, c ¢
+d or d ¢
∗c)
• c get a : c → store → T (c, a) (c ∈ C, a ∈ Mattr(c))
• c set a : c → T (c, a) → store → store (c ∈ C, a ∈ Mattr(c))
ここで,¢,¢+,¢∗は,クラスの継承関係を表す記号である.c
¢ d
は,cがd
の親ク ラスであることを意味する.つまり,d∈ Minher(c)
と等価である.さらに,c¢
+d
は,c
がd
の祖先クラスであることを,c¢
∗d
は,c= d
またはc
がd
の祖先クラスであること を意味する.3.3.4 関数,コラボレーションの記述
関数
関数は,基本演算子を組み合わせて記述する.例として,クラス
person
に関する関数 の定義を示す.クラスperson
は,int型の属性としてx
座標x,y
座標y
持つとする.ま た,クラスperson
は関数person move
を持つとする.move
は,x座標,y座標それぞれ,dx,dy
だけ移動させる.この関数は,属性x,y
に対するget
演算子,set演算子と,ML の整数ライブラリに提供される’+’を用いて,ML形式で以下のように定義される.person_move : person -> int -> int -> store -> store fun person_move p dx dy store =
let
val x = person_get_x p store val y = person_get_y p store
val s0 = person_set_x p (x+dx) store val s1 = person_set_y p (y+dy) s0 in
s1
end;;
また,すでに定義された関数は,他の関数で使用できる.person move を用いて,x座 標を
1
加える関数person incX
は以下のように記述される.person_incX : person -> store -> store
fun person_incX p store = person_move p 1 0 store;;
コラボレーションの記述
コラボレーションは,まとまった機能を実現する複数オブジェクトの協調動作である.
これは,複数の関数や基本演算子からなる,機能単位の関数である.よって,記述に関し ては,基本的に関数の記述と同じである.
コラボレーションの例を挙げるため,もうひとつのクラス
history
を用意する.クラ スhistory
は,位置の履歴を残すためのクラスで,(int*int) list型の属性record
を もつ.また,クラスhistory
は関数addRecord
を持つとする.これは,recordに履歴を 追加する関数であり,以下のように定義できるhistory_addRecord : history -> int -> int -> store -> store fun history_addRecord h x y store =
let
val record = history_get_record h store
val s0 = history_set_record h ((x,y)::record) store in
s0 end;;
ここで,personのを移動させ,移動先の位置履歴を記録するコラボレーション
moveAndAddHistory
を定義すると以下のようになる.moveAndAddHistory : person -> history -> int -> int -> store -> store fun moveAndAddHistory p h dx dy store =
let
val s0 = person_move p dx dy store val x = person_get_x p s0
val y = person_get_y p s0
val s1 = history_addRecord h (x,y) s0 in
s1
end;;
3.3.5 公理
公理は,オブジェクト指向理論で定義した定数や演算子に関する基本的性質を記述した ものである.公理は
36
種類存在する.証明の作業では,必要に応じ公理を用いることで,証明内容の単純化や証明を得ることができる.以下に代表的な公理を
2
つ挙げる.• ∀o s. c ex o s ⇒ (c get a o (c set a o x s) = x)
オブジェクト
o
がストアに存在するならば,その属性a
をx
に変換し,そ の直後に同じ属性を取得したとき,その値はx
である.• ∀o
1o
2s. ¬(o
1= o
2) ⇒ (c get a o
1(c set a o
2x s) = c get a o
1s)
オブジェクト
o
2の属性a
を更新直後,それとは異なるオブジェクトo
1の 同じ属性を取得したとき,その値は,更新前に得られる値と等しい,つま り,異なる2
つのオブジェクトの属性は独立している.これらの公理を用いて証明は行われる.証明の基本的な流れは以下のようになる.
1.
命題を基本演算子に分解しする.2.
それぞれの形に適した公理を用いて,冗長な部分を削除・単純化する.3.
公理を用いて,真理値を得る矢竹らは,証明作業において,これらの公理を必要に応じて適応するタクティック
(証
明戦略)もいくつか提供している.3.4 ML 形式, HOL 形式での記述
HOL
はML
の上に作られた定理証明器である.本研究での演繹的な証明は定理証明シ ステムHOL
を用いて行われる.そのため,HOL
形式によるシステムの記述は必須事項で ある.しかしながら,HOLでは,関数を実行するという概念がない.したがって,UML 図から直接HOL
形式の関数に変換した場合,実行テストができないので,関数の記述段 階で起こりうるバグが取り除きづらいといえる.本研究では,モデルの仕様に対する本質的な機能やセキュリティの不具合に関する証明 を目的としており,HOLの証明段階でこのようなバグが含まれていた場合,不必要な混 乱を引き起こす原因となる.そのため,HOL形式の記述段階では,下流工程で起こりう るようなバグが,取り除かれていることをが望ましい.
以上の理由より本研究では,まず
ML
形式で記述し,テスト実行を行った後HOL
形式 へ変換する.3.4.1 ML 形式化とテスト実行
オブジェクト指向モデルの
ML
形式化を行う.具体的にはオブジェクト指向理論によ り与えられる基本演算子を用いて,システムのコラボレーションを関数として記述する.システムのコラボレーションは,この段階では
UML
のシーケンス図(コラボレーション 図)によって記述されており,それを元にコード化を行う.基本的な記述法については,section 3.3.4
を参照されたい.記述した関数,コラボレーションに対し,実行テストを行う.実行テストは,関数に具 体的な値を入れ,返り値をチェックする.ただし,オブジェクト指向理論による関数の多 くは,オブジェクトの中身の更新を行う関数であり,返り値は更新されたストアとなる場 合が多い.このため,チェック対象となる属性を表示する関数を別途用意しする必要があ る.例として,クラス
person
の属性x,y
を知るためには,以下のような関数が必要と なる.info_person : person -> store -> (int*int) fun info_person p store =
let
val x = person_get_x p store val y = person_get_y p store in
(x,y) end;;
これにより,info personを用いて,person moveについて以下のような実行テストが行 える.前提として,状態
store
でperson
型のp
が,座標(1,1)
にいるとする.- info_person p store;;
- - > val it = (1, 1) : int * int
- val newStore = person_move p 1 2 store;;
- - > val newStore = store : store - info_person p newStore;;
- - > val it = (2, 3) : int * int - info_person p store;;
- - > val it = (1, 1) : int * int
ここでは,まず,初期状態でのストア(store)における,prerson型のオブジェクト
p
の 位置(1, 1)
を表示した.次に,pをx
軸方向に1,y
軸方向に2
動かした(person movep 1 2 store).person move
は,返り値として更新されてストアを返すだけで,思った とおりに機能したかは判定できない.次に,その更新されたストア(newStore)におけ るp
の位置(2, 3)
を表示させた.また,冗長であるが,再び初期状態でのストア(store)における,pの位置
(1, 1)
を 表示させた.これにより,状態を表す変数ストアが,各状態を正しく保存していることが わかる.3.5 証明
システム対し,演繹的方法により証明を行う.システムは,そのとりうる状態の集合
S (s
0∈ S),状態を変化させるコラボレーション f : S → S
の集合F
の組によって定義される.
System = (S, F )
証明は
HOL
で行うため,まずML
形式で記述したものをHOL
形式に変換する.3.5.1 HOL 形式化
ML
で記述した関数をHOL
形式に変換する.ML形式とHOL
形式では,記述の文法が 多少異なる.また,MLが提供する関数群とHOL
が提供する関数群は異なる.共通であ る関数(+,-,etc.)は書き直す必要は無いが,HOLで定義されていない関数は,その関 数に相当するHOL
形式の関数に書き直さなければならない.例えば,
filter fst snd hd ("stringA"^"stringB")
などは,それぞれFILTER FST SND HD (STRCAT "stringA" "stringB")
に書き直す.また,中には
ML
の関数に対応するHOL
の関数が存在しない場合がある.この場合,MLの関数に対応する関数を定義する必要がある.
ML
形式での定義とHOL
形式の定義を比較する.ML形式のperson move
の定義は以 下のように記述された.fun person_move p dx dy store = let
val x = person_get_x p store val y = person_get_y p store
val s0 = person_set_x p (x+dx) store val s1 = person_set_y p (y+dy) s0 in
s1
end;;
HOL
形式では以下のように定義する.val person_move =
Define ‘person_move p dx dy store =
let x = person_get_x p store in let y = person_get_y p store in
let s0 = person_set_x p (x+dx) store in let s1 = person_set_y p (y+dy) s0 in
s1 ‘;;
この定義の結果は以下のように表示される.
Definition has been stored under "person_move_def".
> val person_move =
|- !x y store.person_move p dx dy store = (let x = person_get_x p store in
let y = person_get_y p store in
let s0 = person_set_x p (x+dx) store in let s1 = person_set_y p (y+dy) s0 in
s1):thm
このようにして,ML形式の関数をすべて
HOL
形式に書き直す.3.5.2 命題の設定
具体的な命題の作り方の例を挙げる.
HOL
上のオブジェクト指向理論では,システムの 状態はストアで表現される.ストアに対する述語は,真理値を返す関数として記述できる.例えば,「クラス
person
のオブジェクトが,座標(1,1)
にいる」という述語P personOn 1 1
は以下のように定義される.val P_personOn_1_1=
Define ‘ P_personOn_1_1 p store =
let x = person_get_x p store in let y = person_get_y p store in
((x=1)/\(y=1))‘;;
この述語は,以下のような返り値を返す.
1.
ストアs1
では,pの座標を(1,1)
とするとP personOn 1 1 p s1
は真となる.2.
ストアs2
では,pの座標を(1,1)
以外とすると(例えば(0,1),(1,2)etc.)
P personOn 1 1 p s2
は偽となる.また,証明の前提条件として,「store上に
p
が存在する」という述語P exPerson
を以 下のように定義する.val P_exPerson =
Define‘ P_exPerson p store = person_ex p store‘;;
これらの述語を用いて命題を立てる.命題の例としては,以下のようものがかける.
! p store . (P_personOn_1_1 p store)/\
(P_exPerson p store) ==>
let newStore = person_move p 0 0 store in (P_personOn_1_1 p newStore)
これは,
「任意の
p store
に対し,p
がstore
上に存在し,p
が(1,1)
にいるならば,x
軸方向に0,y
軸方向に0
移動した後のp
の位置は(1,1)
である」という命題である.
3.5.3 証明作業
ここでは,例としてあげた命題を実際に証明してみる.
まず,Goalの設定をする
g ‘! p store . (P_personOn_1_1 p store)/\
(P_exPerson p store) ==>
let newStore = person_move p 0 0 store in (P_personOn_1_1 p newStore) ‘;;
- - > val it =
Proof manager status: 1 proof.
1. Incomplete:
Initial goal:
!p store.
P_personOn_1_1 p store /\ P_exPerson p store ==>
(let newStore = person_move p 0 0 store in P_personOn_1_1 p newStore)
: proofs
これに対し,以下の
Tactics
を順に適用する.Tacticsの適用は,この部分の証明手順と各
Tactics
の意味は,付録D.1
に記述してある.e (REPEAT GEN_TAC);;
e (LET_TAC);;
e (REWRITE_TAC [person_move]);;
e (LET_TAC);;
e (REWRITE_TAC [P_personOn_1_1]);;
e (LET_TAC);;
e (REWRITE_TAC [P_exPerson]);;
e (ROT_SLICE_TAC);;
e (OBJ_SIMP_TAC);;
e (RW_TAC arith_ss []);;
これにより,以下の結果が得られる.
> val it =
Initial goal proved.
|- !p store.
P_personOn_1_1 p store /\ P_exPerson p store ==>
(let newStore = person_move p 0 0 store in P_personOn_1_1 p newStore) : goalstack - -
以上により,Goalは証明された.証明された内容は,適当な名前をつけて,定理として 利用できる.ここでは
lemma sample
と名づけるとする.val lemma_sample = top_thm();;
drop();;
また,ここまでの処理は,
prove
というコマンドを用いて,まとめて以下のように書く こともできる.val lemma_sample = prove
(‘‘! p store . (P_personOn_1_1 p store)/\
(P_exPerson p store) ==>
let newStore = person_move p 0 0 store in (P_personOn_1_1 p newStore) ‘‘,
EVERY
[REPEAT GEN_TAC, LET_TAC,
REWRITE_TAC [person_move], LET_TAC,
REWRITE_TAC [P_personOn_1_1], LET_TAC,
REWRITE_TAC [P_exPerson], ROT_SLICE_TAC,
OBJ_SIMP_TAC,
RW_TAC arith_ss []]);;
このように整理して保存しておき,必要なときに実行し,利用すると便利である.