九州大学学術情報リポジトリ
Kyushu University Institutional Repository
強磁性薄膜パターンにおけるスピン波の動特性とデ バイス応用に関する研究
牙, 暁瑞
https://doi.org/10.15017/4060192
出版情報:Kyushu University, 2019, 博士(工学), 課程博士 バージョン:
権利関係:
強磁性薄膜パターンにおける スピン波の動特性とデバイス応用
に関する研究
牙 暁瑞
目次
第一章 序論………..……….………..………1
1-1 はじめに………..………..………1
1-2 スピン波のデバイス応用…..……….……...……2
1-3 磁性層間交換結合による磁気特性の機能統合……….……3
1-4 磁化渦の構造と物性………...……4
1-5 研究目的と論文構成……..……….…5
第二章 磁性細線における定在スピン波特性とデバイス応用………….……....……7
2-1 序言………...……7
2-2 シミュレーションモデル……….……….………...……7
2-3 スピン波発生・検出部の形状最適化……..……….………...……15
2-4 スピン波デバイス特性のダンピング定数依存性……..………...……19
2-5 微細化によるスピン波励起特性の向上……….……….……26
2-6 結言………...……28
参考文献……….………...……29
第三章 磁気異方性の変調による省電力スピン波励起…………...…………....……30
3-1 序言……….……….…...……30
3-2 シミュレーションモデル………...……31
3-3 垂直磁気異方性の変調によるパラメトリックスピン波励起…....…32
3-4 パラメトリック励起と線形励起の比較…...………….………..…38
3-5 励起特性の素子構造依存性と演算機能への応用….……….…42
3-6 結言………….………..…………..…47
参考文献………...……49
第四章 交換結合膜における定在スピン波の動特性………....……51
4-1 序言……….……...……51
4-2 交換結合膜におけるスピン波の動特性と層構造による制御...…….51
4-2-1 面内磁気異方性を有する交換結合膜………51
4-2-2 垂直磁気異方性を有する交換結合膜………59
4-3 複合磁気異方性細線におけるスピンツイストとスピン波励起....…64
4-4 反強磁性交換結合による共鳴特性の制御...………70
4-5 結言………..…………..…78
参考文献……….……….………...……80
第五章 磁化渦構造のスピン動特性………..……..……….…...……83
5-1 序言………..….…...……83
5-2 シミュレーションモデル………..……...…...……83
5-3 円偏波交流磁界による磁化渦運動の共鳴励起………...…….…84
5-4 2層導体を用いた磁化渦の共鳴励起と渦極性制御…….….……..……89
5-5 磁化渦を情報担体とする記憶素子の機能動作解析………...……93
5-6 結言………..…………..………..…97
参考文献……….…….……….……98
第六章 結論………...………....…100
謝辞
~ 1 ~ 第 1 章 序論
1.1はじめに
情報処理デバイスや情報記録デバイスにおいては,動作の高速化,小型化,省エ ネルギー化が必須である.しかしながら,CMOS(Complementary Metal Oxide Semiconductor)等に代表される半導体集積回路においては,素子サイズの微細化に 伴う動作消費電力の増大が深刻化しており,物理限界にさしかかりつつあるとされ ている.このような状況の中,「スピン波」と呼ばれる磁性体中を伝播する波動を 利用した新規デバイスの研究が活発化しつつある.スピン波の周波数は,マイクロ 波帯域(数GHz~数十GHz)であり,波長はサブm~数m 程度と極めて短いため,
その波動性,特に位相情報をチップ形状のデバイス上で,論理演算や信号処理に利 用することが可能である.また,スピン波の伝播には,荷電粒子の移動を伴わない ため,エネルギーの損失が小さいという利点があり,極限的な低消費電力化が期待 される.しかしながら,実用レベルの動作性能を実現するためには,微細領域にお けるスピン波動特性に関する詳細な理解に加え,スピン波を高いエネルギー効率で 励起するための材料系の探索や,スピン波の特性を種々の機能に結びつけるための 具体的なデバイス化構想が必要である.
本研究で用いるマイクロマグネティクスにもとづく計算機シミュレーションは,
実験では観測が困難な微細領域や磁性体内部のスピン波動特性を詳細に解析する ことが可能であり,スピン波利用により期待できる新機能の探求,および,材料磁 気特性やデバイス構造に関する多くのパラメータ空間からの最適解の抽出に有力 な研究手法である.
~ 2 ~
1.2スピン波のデバイス応用
スピン波のデバイス応用を図るうえで基本的な動作となるスピン波の励起,制御 および電気的検出に関する概略図を図1.1(a) に示す.スピン波の励起は,ストリッ プラインやコプレーナ構造の導体線にマイクロ波電流を印加し,その作る交流磁界 によって磁性体中のスピンの歳差運動を共鳴的に誘起することによって行なわれ る.スピン波の波長やスピン波共鳴周波数は,スピン波励起用導体線の形状によっ て決まるので,その適正な設計はスピン波デバイスの動作性能の向上に重要である.
励起されたスピン波の振幅,位相などの特性は,磁性体中をスピン波が伝播する過 程で変化するが,その変化量は誘導法などにより電気的に検出される.伝播過程で のスピン波の位相変化や振幅変化は,マイクロ波域での位相シフターやバンドパス フィルター等に応用することができる.また,スピン波の伝播過程で外部から磁界 を印加することにより,スピン波を制御することができる.
図1.1(b) に本研究で提案する3端子構造のスピン波デバイスの概念図を示す.
本デバイスは位相比較器や論理演算素子として使うことが可能である.両側の2つ の導体線によって励起されたスピン波は中央部の検出部へ向かって伝播する.検出 部では,2 つのスピン波の干渉により合成スピン波が形成されるが,その様態は2 つのスピン波の位相差に依存する.合成スピン波の様態差は,誘導法などによって 検出部で電気信号に変換することが可能である.すなわち,入力用導体線に印加す るマイクロ波電流の位相を論理入力とした論理演算機能や 2 入力間の位相比較機 能などへの応用が期待できる.さらに,複数のスピン波媒体を集積することにより,
磁界の空間並列性を活用した多ビットの並列演算や,演算結果のアナログ信号とし ての出力等も可能である.
上記のようなデバイス応用における省電力性や集積性の向上を追求するうえで,
局所的かつエネルギー効率に優れたスピン波励起が重要であり,従来用いられてい
~ 3 ~
る電流磁界に代わるスピン波励起法の開発が渇望されている.本研究では,局所的 な電圧印加等によって誘起される磁気異方性の変調を利用したスピン波励起の可 能性を示す.
1.3 磁性層間交換結合による磁気特性の機能統合
スピン波の共鳴周波数と共鳴時の歳差振幅は,スピン波デバイスの機能動作性能 に係わる重要な特性であり,スピン波の伝播経路として用いる磁性体の飽和磁化や 磁気異方性に大きく依存する.これまでにスピン波に関する多くの研究報告がある イットリウム鉄ガーネット(Yttrium Ion Ganrnet (YIG)) はフェリ磁性体であるため 飽和磁化が小さく,Fe-Ni 合金(パーマロイ)は磁気異方性が小さいため,共鳴周波 数の高周波化に限界があるのが現状である.また,YIGは酸化物であるため微細加 工が困難であり,パーマロイは磁気異方性が小さいため微細パターン端部において 磁化が不安定化するという欠点を有している.一方,Co-Cr-Ta 合金,FePt 合金,
Co/Pt 多層膜などの強磁性金属は,高飽和磁化かつ高磁気異方性を有するが,その
大きな磁気異方性は歳差運動を抑制する効果にも繋がるため,実用レベルの歳差振
図1.1(a) 電流磁界によるスピン波の励起,制御および電磁誘導による検出
(b) スピン波の干渉を利用したデバイスの概略図
~ 4 ~
幅を励起するためには大きな磁界が必要となる.また,磁気異方性の大きな磁性体 は,一般に,スピン波の減衰に係わるダンピング定数と呼ばれる物理定数が大きい ため,このことも歳差振幅を抑制する要因となっている.すなわち,磁気異方性の 大きさは,機能動作の高周波化と歳差振幅の増大に関しては,相反要求となってい る.このような,材料磁気特性に関するジレンマを解決するため,本研究では,異 なる磁性層の交換結合を利用した新しいスピン波媒体の創出を提案する.
1.4 磁化渦の構造と物性
スピン波の伝播は電子輸送の場合のようなジュール損失を伴わないが,励起され た磁気ネルギーは格子系へ散逸するため伝播に伴ってスピン波は減衰する.これに 対し,微細加工技術などによって得られる円形,正方形などの磁性薄膜パターン中 には,図1.2に示すような磁化渦構造が安定に存在することが多くの研究によって 確認されている.このような,磁化渦は外部からの磁界印加によって移動運動を行 うが,自己組織的な構造であるためスピン波のような伝播による減衰は起きず,そ の形状を維持した状態で孤立定在波(ソリトン)のように運動すること,また,スピ ンのジャイロ的な特性に起因して,運動方向と直交方向に力が作用すること等も実 験により報告されている.
磁 性 体 の デ バ イ ス 応 用 と し て 代 表 的 な も の は , ハ ー ド デ ィ ク(Hard Disk Drive(HDD)) や磁性体ランダムアクセスメモリ(Magnetic Random Acess Memory
(MRAM)) 等の情報記憶デバイスである.これらの記憶デバイスでは,ある方向に
対して磁化が平行か反平行であるかを2進情報としている.本研究では,磁化渦の 動特性が渦中心部の磁化方向(渦極性)により顕著に異なることに着目し,渦極性 を2進情報とする新しい磁性体記憶方式を提案する.磁化渦は内部で磁束が閉じた 構造(閉磁路)であるため,記憶ビット間の磁気的相互作用が小さく,本研究で示す
~ 5 ~
ように数 10 nm 程度の微細パターン中にも安定に存在することから,記憶ビット
の高集積化にも適している.
1.5 研究目的と論文構成
本研究は,マイクロマグネティクスシミュレーションにより,未だ充分な理解が 得られていない微細領域におけるスピンの動特性を解明するとともに,それを位相 比較機能,論理演算機能,記憶機能等に活用するための具体的なデバイス構造を提 案し,特性向上に向けた材料および形状に関する設計指針を確立することを目的と している.研究成果に関する各章の構成は以下のとおりである.
第2章では,スピン波デバイスにおける機能動作の基本となるスピン波の励起,
伝播,検出の詳細を解析した結果について述べている.これに基づき,強磁性細線 と入出力用導体線から構成される3端子構造のスピン波デバイスを提案し,基本動 作の検証結果と動作性能の向上に向けた材料磁気特性およびデバイス構造の設計 指針を示している.
図1.2 磁性薄膜パターン中に形成される磁化渦の磁化ベクトル分布
~ 6 ~
第3 章では,電圧により誘起される磁気異方性変調効果を利用した省電力性 と集積性に優れたスピン波励起法を提案し,スピン波の位相を情報とする論理演 算機能への応用について述べている.
第4章では,スピン波応用デバイスにおいて相反性能となる動作高周波化とス ピン歳差振幅の増大とをともに達成する方法として,異なる磁性薄膜を積層し,
交換結合により各層の磁気特性を統合する新しいスピン波媒体を提案し,その有 用性について述べている.また,磁化容易軸方向の異なる磁性層を積層すること により,スピン波の伝播損失低減に有効なスピン配列構造が人為的に創出できる ことを示している.
第5章では,矩形磁性薄膜パターン中に安定に存在する磁化渦構造を情報担体 とする新しい情報記憶方式を提案し,書き込み動作と読み出し動作に関するシミ ュレーション結果を通して得られたデバイス構造の設計指針について述べてい る.
~ 7 ~
第 2 章 磁性細線における定在スピン波特性とデバイス応用
2.1 序言
金属強磁性材料は高飽和磁化特性を有するため伝送線との電磁誘導結合が強く,
高周波デバイス応用に適した材料である. Fe 薄膜の強磁性共鳴 (FMR) 周波数は 外部からのバイアス磁界によって変化させることができるため,電気的な帯域調節 が可能なマイクロ波帯域阻止フィルタ等に応用されてきた1,2.近年,強磁性薄膜に おけるスピンの集団的歳差運動であるスピン波に関する研究が,基礎物理とその応 用の観点から活発化している 3.スピン波は,微細加工技術により形成された微細 な磁性細線を伝播路とすることができるため,その導波路をチップ上に集積するこ とが可能である4.5.最近の高度なリソグラフィ技術により,スピン波の波長程度の 大きさの磁気ナノ構造の作製が可能となり,スピンダイナミクスに関する様々な形 状効果や,それに由来する実用的な機能が見出されている6,7.スピン波のデバイス 応用に際しても,低消費電力性の追及は,極めて重要な技術課題の一つである.微 細磁性パターン等のようにスピンの歳差運動が有限領域に限定されたとき誘起さ れる定存スピン波共鳴 (Standing Spin Wave: SSW) は,最も電力効率の高い励起モ ードであり,量子性が付与された特徴的なスピン波動特性が発現する 8,9,10,11.本章 では,定在スピン波共鳴の制御と,その位相比較器への応用の可能性について行っ たマイクロマグネティックシミュレーションについて述べる.
2.2 シミュレーションモデル
本シミュレーションでは,解析対象とする強磁性細線を立方体形状または直方体形 状の空間格子に要素分割し,各空間格子(以下,セルと称す)に対して,異方性エネ
~ 8 ~
ルギー,静磁エネルギー,交換エネルギー,ゼーマンエネルギーの4つの磁気的エ ネルギーを考慮対象としている.以下に各エネルギーの定式化について述べる.
結晶構造等を反映し,磁化の方向によって強磁性体の内部エネルギーが異なる性 質を磁気異方性と呼び,内部エネルギーが最小となる方向を磁化容易方向という.
本シミュレーションでは,特定の軸に沿った2方向が容易方向となる一軸磁気異方 性を仮定しており,異方性エネルギーは次式のように表される.
𝐸𝑎𝑛𝑖(𝐫𝑖) = 𝐾𝑢sin2𝜃𝑖, 𝑖 = 1, 2, ⋯ , 𝑁 (2.1) ここでKuは一軸磁気異方性定数, は容易方向と磁化方向とのなす角度である.
また,添え字のiは,各セルに付した番号である.シミュレーションでは,直交座 標系を用いた各方向成分を計算に用いている.(2.1)式は,磁化容易方向および磁化 方向の単位ベクトルki,miを用いて次式のように表すことができる.
𝐸𝑎𝑛𝑖(𝐫𝑖) = 𝐾𝑢|𝐤𝑖× 𝐦𝑖|2
= 𝐾𝑢(1 − (𝐤𝑖∙ 𝐦𝑖)2), 𝑖 = 1, 2, ⋯ , 𝑁 (2.2) 磁気モーメントは他の磁気モーメントの位置に静磁界(反磁界)を生じるため,
2つの磁気モーメントの間には,それらの相互作用により静磁エネルギーが生じる.
このような磁気モーメント間の静磁エネルギーは,磁気モーメント間距離の3乗に 反比例して減少するが,相互作用に係わる磁気モーメント数は遠距離になるほど増 加するため,一般に磁気特性への影響は無視できない.各セルの静磁エネルギーは 次式により定式化される.
𝐸𝑚𝑎𝑔(𝐫𝑖) = −𝐌𝑖∙ (∑ 𝐷𝑖𝑗𝐌𝑗
𝑗≠𝑖
+1
2𝐷𝑖𝑖𝐌𝑖) , 𝑗 = 1, 2, ⋯ , 𝑁 (2.3)
𝐷𝑖𝑗= 1
𝑣𝑖∫ 𝑑𝐫𝑖3
𝑣𝑖
∫ 𝑑𝐫𝑗2(𝐫𝑖− 𝐫𝑗)𝐧𝑗
|𝐫𝑖− 𝐫𝑗|3
𝑠𝑗
(2.4) 2.3式の第1項は,異なるセル間の相互作用エネルギーを表している.第2項は,
各セル内の反磁界エネルギーを表している.マイクロマグネティクスシミュレーシ
~ 9 ~
ョンでは,セル内の磁化は一様であると仮定しているため,磁化が不連続となる隣 接セル間に生じる表面磁荷(magnetic surface charge)を用いて各セルからの静磁界を 計算している.この静磁界とセル内の磁化との相互作用エネルギーを各セルについ て体積積分し,その総和を計算することによって,磁性細線全体の静磁エネルギー が算出される .2.4式のrjはそこからの静磁界を計算しようとするセル(ソースセ ル)の表面を表す位置ベクトル,njはセル表面の法線方向を示す単位ベクトルであ る.また,riは静磁エネルギーを計算するセル(評価セル)の位置ベクトルである.
Dijはソースセルと評価セルとの配置によって決まるテンソルである.静磁エネル ギーの計算には,計算領域内に存在する全てのセル同士の相互作用の計算が必要と なる.このため,その計算量はセル数の二乗に比例して増加し,マイクロマグネテ ィクスシミュレーションにおいて最も計算時間を要する部分である.本シミュレー ションでは,静磁エネルギー計算における磁化mjとテンソルDijの畳み込み積分の 部分に,高速フーリエ変換(Fast Fourier Transform (FFT))を用いることで計算の高速 化を図っている.
強磁性体内部においては,隣接する磁気モーメントを平行に配列させようとする 交換相互作用が存在することで自発磁化が発生する.このような磁気モーメント間 の相互作用を隣接セル間の相互作用として扱い,交換エネルギーを次式のように定 式化している.
𝐸𝑒𝑥(𝐫𝑖) = − 𝐴
𝑀𝑠2𝑎2𝐌𝑖∙ ∑ 𝐌𝑗
𝑛.𝑛.
, 𝑖 1, 2, ⋯ , 𝑁 (2.5)
ここでAは交換相互作用の大きさを表す交換スティフネス定数,aは隣接セル間 の間隔である.静磁気相互作用が長距離にわたり影響を及ぼす相互作用であり,全 セル間の相互作用を計算しているのに対し,交換相互作用は近距離の磁気モーメン ト間の相互作用であることから,交換相互作用の範囲は最隣接セルのみと仮定して いる.
~ 10 ~
ゼーマンエネルギーは外部磁界と磁化との相互作用エネルギーであり,次式によ り表される.外部磁界としては,電磁石や導体コイルから発生する磁界等が相当す る.
𝐸𝑎𝑝𝑝(𝐫𝑖) = −𝐇𝑖∙ 𝐌𝑖, 𝑖 = 1, 2, ⋯ , 𝑁 (2.6) ここでHiは各評価セルに印加される外部磁界(ベクトル)である.
各セルにおける磁気的エネルギーは前述の 4 つのエネルギーの総和として次式 のように表される.
𝐸𝑡𝑜𝑡(𝐫𝑖) = 𝐸𝑎𝑛𝑖(𝐫𝑖) + 𝐸𝑚𝑎𝑔(𝐫𝑖) + 𝐸𝑒𝑥(𝐫𝑖) + 𝐸𝑎𝑝𝑝(𝐫𝑖) (2.7) 上記の磁気的エネルギー(Etot)を各セルの磁化 Miで偏微分することにより,実効 磁界Hi・effを算出することができる.
𝐇𝑖∙𝑒𝑓𝑓= −𝜕𝐸𝑡𝑜𝑡(𝐫𝑖)
𝜕𝐌𝑖
= −𝜕𝐸𝑡𝑜𝑡(𝐫𝑖)
𝜕𝑀𝑖𝑥 𝐞𝑥−𝜕𝐸𝑡𝑜𝑡(𝐫𝑖)
𝜕𝑀𝑖𝑦 𝐞𝑦−𝜕𝐸𝑡𝑜𝑡(𝐫𝑖)
𝜕𝑀𝑖𝑧 𝐞𝑧 (2.8)
ex,ey,ezはx,y,z,軸方向の単位ベクトルである.上式の偏微分から,各実効 磁界が次式のように導出される.
𝐇𝑖∙𝑒𝑓𝑓= 2𝐾𝑢
𝑀𝑠 (𝐤𝑖∙ 𝐦𝑖)𝐤𝑖+ 𝑀𝑠∑ 𝐷𝑖𝑗∙
𝑁
𝑗=1
𝐦𝑗+ 2𝐴
𝑀𝑠𝑎2∑ 𝐦𝑗
𝑛.𝑛.
+ 𝐇𝑖 (2.9)
上式右辺の第1項,第2項,第3項は各々,磁気異方性エネルギー,静磁エネル ギー,交換エネルギーに起因する実効磁界であり,以降,異方性実効磁界,静磁界,
交換実効磁界と称す.第4項は外部磁界である.
各セルにおける磁化の時間変化は(2.10)式に示すLandau-Lifshitz-Gilbert方程式に より記述される.磁化に実効磁界が作用すると図2.1に示すような歳差運動が生じ る.歳差運動状態の考察には,磁化ベクトルの方向 M,磁化ベクトルの運動方向
dM/dt,MとdM/dtとの外積方向を,各々,径r,偏角φ,極角θに取った移動極座
~ 11 ~
標系での実効磁界解析が有用である.次式に示すように,LLG方程式は,歳差運動 の周波数が実効磁界のθ方向成分から計算され,歳差運動振幅は,実効磁界のφ成 分が作るトルクとダンピングトルクとのバランスによって定まることを表わして いる.強磁性共鳴や,本論文が対象とするスピン波共鳴なども,このような実効磁 界の成分解析により定量的な解析が可能である.
𝑑𝐌𝑖
𝑑𝑡 = −𝛾𝐌𝒊× 𝐇𝑖∙𝑒𝑓𝑓+ 𝛼
𝑀𝑠𝐌𝒊×𝑑𝐌𝑖
𝑑𝑡 , i = 1, 2, ⋯ , N θ方向: 𝑑𝒎
𝑑𝑡 = −𝛾𝒎 × 𝐇𝑒𝑓𝑓 `` = −𝛾𝒎 × (𝐇𝑒𝑓𝑓・(d𝒎 × 𝒎))(d𝒎 × 𝒎) φ方向: 𝒎 ×𝑑𝒎
𝑑𝑡 = −𝛾𝒎 × 𝐇𝑒𝑓𝑓` = −𝛾𝒎 × ((𝐇𝑒𝑓𝑓・d𝒎)d𝒎) (2.10)
(2.10)式では,磁化Miをその大きさ(絶対値)で規格化している.ここで, はジ
ャイロ磁気定数と呼ばれ,磁気モーメントの成因によって決まるg因子を用いて次 式のように表される.
𝛾 = 8.79 × 106g [Hz Oe⁄ ] (2.11)
以下の各章を含め,本研究ではg因子の値を2.0とし, の値を1.76×107 rad/Oe/s としている.また, はダンピング定数と呼ばれる磁気特性定数で,多くの金属強
図2.1 磁気プリセッションの各成分
~ 12 ~
磁性材料では0.005~0.3程度の値をとる.(2.10)式において,第一項は実効磁界が磁 気モーメントに及ぼすトルクを表し(トルク項),第二項は,磁化の運動に伴うエ ネルギーの散逸を表すダンピング項である.(2.10)式は,磁化及び実効磁界の直交 座標成分を用いて次式のように表される.
𝑑𝑀𝑖𝑥
𝑑𝑡 = −𝛾(𝑀𝑖𝑦𝐻𝑖∙𝑒𝑓𝑓𝑧 − 𝑀𝑖𝑧𝐻𝑖∙𝑒𝑓𝑓𝑦 ) + 𝛼
𝑀𝑠(𝑀𝑖𝑦𝑑𝑀𝑖𝑧
𝑑𝑡 − 𝑀𝑖𝑧𝑑𝑀𝑖𝑦
𝑑𝑡 ) (2.12) 𝑑𝑀𝑖𝑦
𝑑𝑡 = −𝛾(𝑀𝑖𝑧𝐻𝑖∙𝑒𝑓𝑓𝑥 − 𝑀𝑖𝑥𝐻𝑖∙𝑒𝑓𝑓𝑧 ) + 𝛼
𝑀𝑠(𝑀𝑖𝑧𝑑𝑀𝑖𝑥
𝑑𝑡 − 𝑀𝑖𝑥𝑑𝑀𝑖𝑧
𝑑𝑡 ) (2.13) 𝑑𝑀𝑖𝑧
𝑑𝑡 = −𝛾(𝑀𝑖𝑥𝐻𝑖∙𝑒𝑓𝑓𝑦 − 𝑀𝑖𝑦𝐻𝑖∙𝑒𝑓𝑓𝑥 ) + 𝛼
𝑀𝑠(𝑀𝑖𝑥𝑑𝑀𝑖𝑦
𝑑𝑡 − 𝑀𝑖𝑦𝑑𝑀𝑖𝑥
𝑑𝑡 ) (2.14)
LLG 方程式は 2 階の非線形偏微分方程式であるため一般には解析的に解くこと が出来ず,多くの場合,計算機を用いた数値計算が必要となる.(2.10)式を解く際 には,磁化Miの1階時間微分と,交換等価磁界 Hexの2階空間微分とを差分近似 する.本研究ではこれらの数値解法として,以下に示す4次のルンゲ・クッタ・ギ ル(Runge-Kutta-Gill)法を用いた.
𝑦𝑛+1= 𝑦𝑛+𝑘1 6 +1
3(1 − 1
√2) 𝑘2+1
3(1 + 1
√2) 𝑘3+𝑘4
6 + O(ℎ5) (2.15)
ただし
𝑘1 = ℎ𝑓(𝑥𝑛, 𝑦𝑛)
𝑘2= ℎ𝑓 (𝑥𝑛+ℎ
2, 𝑦𝑛+𝑘1
2) 𝑘3= ℎ𝑓 (𝑥𝑛+ℎ
2, 𝑦𝑛+ (−1 2+ 1
√2) 𝑘1+ (1 2− 1
√2) 𝑘2) 𝑘4 = ℎ𝑓 (𝑥𝑛+ ℎ, 𝑦𝑛+ (− 1
√2) 𝑘2+ (1 + 1
√2) 𝑘3) (2.16) 上式は,既知のynから,関数の勾配f(xn,yn)を用いることにより計算刻みhに対す る近似解yn+1を与える式である.各計算刻みに対して, 4回の勾配計算が必要とな
~ 13 ~
るため計算負荷は大きくなるが,4次までのテイラー展開法と等価であり,打切り 誤差は計算刻みh に対し5次のオーダーとなるため計算精度は高くなる.
本章でシミュレーション対象とした 3 端子構造のスピン波デバイスの基本構造 を図2.2 に示す.スピン波は,両端のスピン波励用導体線(線幅: WG) (以下, 発生器 と称す)によって励起され,磁性細線内部を伝搬し,磁性細線の中央部で干渉して 定在スピン波が形成される.磁性細線中央部の電磁誘導検出器(以下,検出器と称 す)は,定在スピン波からの漏れ磁界を出力電圧として検出する.本シミュレーシ ョンでは,検出器(幅: WD)内で面積積分した漏れ磁束を時間微分することにより検 出電圧を算出した.スピン波の励起過程,及び伝搬過程について,磁化の運動を記
述する Landau-Lifshitz-Gilbert 方程式を有限差分法により数値的に解くことでシミ
ュレーションを行った.マイクロマグネティクスに基づく数値計算では,スピン波 内でのスピンの空間的な方向変化を精密に扱う必要がある.このため,スピン波の 伝播媒体とする磁性細線を,細線の幅方向(短軸方向)に沿って,スピン波の波長よ り充分に微細な10nm程度の計算格子に分割した.本シミュレーションにおける代
図2.2 設計した位相比較器の概略図.磁性細線(短軸長Lx、長軸長Ly), スピン波発
生器(導体線幅:WG), 誘導検出器(検出領域幅:WD).
~ 14 ~
表的なスピン波媒体形状である50 m幅細線の場合,4096個の計算格子に分割し ている.時間ステップは計算精度と計算時間を考慮し10-15 sとした.細線幅方向端 部の磁気モーメントに対しては,自由端境界条件を用いた.前記の計算格子間隔
(12.2 nm)と時間ステップ(10-15 s) は,公開されているマイクロマグネティクス標準
問題の数値解を参考にして最適化した.磁気細線の形状は各節において記している.
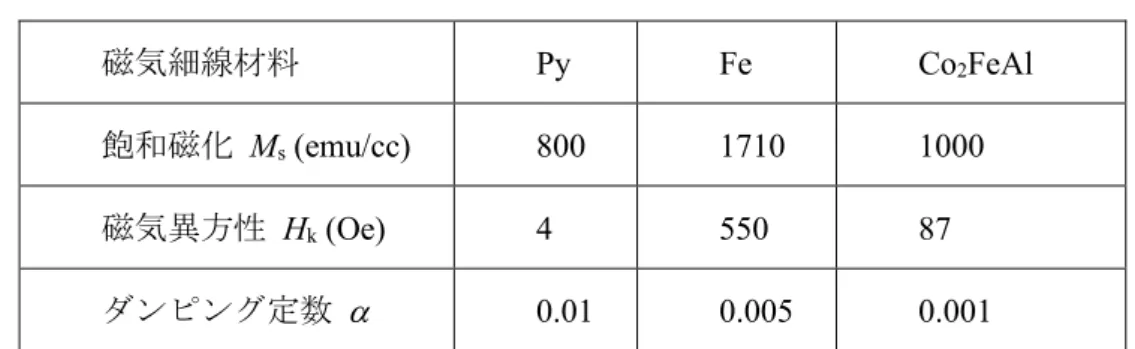
表 2.1 磁気特性
磁気細線材料 Py Fe Co2FeAl 飽和磁化 Ms (emu/cc) 800 1710 1000 磁気異方性 Hk (Oe) 4 550 87 ダンピング定数 0.01 0.005 0.001
本章においては磁性薄膜材料として以下の3種類の磁性薄膜材料を想定した.す なわち,1) 低磁気損失材料であるホイスラー合金 Co2FeAl (CFA)薄膜, 2) 立方磁 気異方性を有するエピタキシャルFe,3) 弱い一軸磁気異方性を有するNi-Fe 合金 薄膜である.各材料の磁気定数として,表 2.1 に示す各値を仮定した.以下では,
各磁気特性パラメータをp_CFA, p_Fe, p_Pyと記す.
図2.3に,スピン波の励起,伝播,干渉過程のシミュレーション結果の一例を示 す.発生器に印加するマイクロ波電流が作る磁界により,発生器直下に局所的なス ピン歳差運動が誘起される.この歳差運動は,発生器の直線部と垂直な2方向へ磁 性薄膜中を波動として伝播する.この内,磁性細線の端部へ向かって伝播したスピ ン波は,端部で反射する.端部がスピン波に対して反射端として作用するため,時 間経過と供に2つのスピン波の干渉が生じ,端部を節とする定在スピン波が形成さ れる.定常状態に達した時のスピン波の歳差運動振幅は,電流磁界の強度とその周
~ 15 ~
波数(以下,励起周波数と称す)に依存し,磁性材料の磁気特性や,スピン波の波長 で決まる特定の励起周波数においてスピン波共鳴が生じ振幅が極大となる.
2.3 スピン波発生・検出部の形状最適化
図2.4 は磁気特性パラメータ p_CFA について,導体線幅の異なる種々の発生器 に対する出力電圧の励起周波数依存性を比較している.同図に示すように,発生器 の中心位置は固定し,線幅(短軸長)のみを変化させている.磁性細線幅が発生器幅 に比べて充分に長い場合には,スピン波の波長が発生器幅によって規定されるため,
スピン波共鳴周波数は発生器幅に依存することが知られている.しかしながら,本 シミュレーションの結果から,定在スピン波においては,スピン波長,および,ス ピン波共鳴周波数が発生器幅に依存せずほぼ一定となることが分かった. 一方,
図2.3. 導体電流磁界による定在スピン波の形成過程
~ 16 ~
図2.4に示されるように,出力電圧は発生器幅に依存して顕著に変化している.図 2.5 は,励起電流を一定値(1 mA)としたときの出力電圧を発生器幅の二乗に対して プロットしたグラフである.発生器幅WGが1 mから4 mの範囲では,WG2の縮 小に伴い,出力電圧が線形的に増大することが分かる.
図2.4. 誘導出力電圧の励起周波数依存性に対するスピン波発生器幅の影響
図2.5 出力電圧の発生器幅依存性
~ 17 ~
スピン波の発生及び検出効率は,磁性細線,発生器,検出器の形状に依存するた め,これらに関する総合的な最適化が重要である.図2.6は,形状の異なる6種類 の 3 端子素子の各設計(Type I ~Type VI)について,印加電流強度を一定にした場 合の出力電圧を比較している.Type I~Type IIIでは,磁性細線の幅を50 mに固定 し,発生器と検出器の形状を変えている.Type Iは直線状の1本の導体線を用いた マイクロストリップライン構造の発生器,Type IIはヘアピン形状の発生器,Type III は中央の信号線の両側にグランド線を配したコプレーナ構造の発生器で,両側のグ ランド線には信号線に流れる電流の1/2の電流が流れる.次節で示すように,端部 を有する磁性細線中に誘起される定在スピン波では,その半波長の整数倍が磁性細 線幅にほぼ等しくなる.このため,各検出器は,定在スピン波からの漏れ磁界変化 を効率的に誘導起電力に変換すべく,各図に示すように,定在スピン波の節部上方 に導体線の間隙部が位置する蛇行形状としている.Type I~Type III の素子におい て,歳差運動振幅が最大となるのは,磁性細線幅の 1/10 がスピン波の半波長にほ ぼ等しくなる 10次モードの定在スピン波であった.発生器と検出器は同層構成と しているため,誘導起電力に寄与するスピン波の節数(以下,有効節数と称す)は
図2.6 異なる形状の発生器及び検出器に対する出力電圧の比較
~ 18 ~
Type I, Type II, Type IIIについては各々,7, 5, 3となる.Type IIに比べType IIIの出 力が著しく低下しているのは,有効節数の減少によるものである.一方,Type Iと
Type IIとの比較では,有効節数がより小さいType IIの出力電圧の方がType Iより
も大きくなっている.これは,Type IIでは往路と複路の電流が供に励起に寄与する ため,より大きな歳差運動が生じるためである.
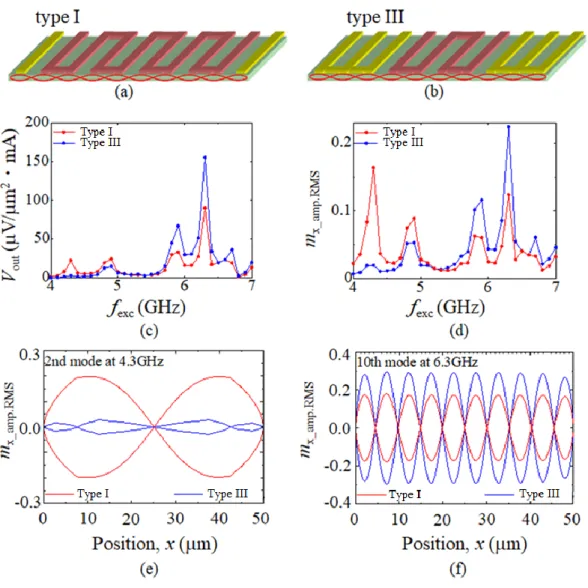
図 2.7 ストリップライン構造(TypeI)及びコプレーナ構造(TypeⅢ)発生器に対する スピン波励起特性の比較
~ 19 ~
図2.7ではType IとType III のスピン波発生器について,スピン波励起特性の詳
細を比較している.図2.7(c), (d)は,両者について,磁性細線全体で平均した歳差運 動振幅と出力電圧の励起周波数依存性を示している.歳差運動振幅,及び出力電圧 が最大となる周波数は両者でほぼ一致しているが,周波数スペクトルは異なってい る.特に,最低次モードの定在スピン波が励起される4.3GHzにおいては,Type III 発生器での歳差振幅がType I発生器に比べて著しく小さい.これは,Type III発生 器における両サイドの2本の導体線が作る磁界の面内成分が,中央の導体線と逆向 きになることに起因している.このため,同図(e)に示すようにType I発生器では基 底状態である2次モードが励起されるのに対し,Type III発生器では基底状態より 高次のモードが励起されてしまうため歳差振幅が低下している.これに対し,励起
周波数6.3 GHzで励起される10次モード(同図(f))の場合は,同図(c) ,(d)に示され
るように,歳差振幅,出力電圧,供にType III発生器の方が大きくなっている.こ
れはType III発生器で作られる磁界の面内成分分布が,10次モードスピン波の波長
と適合しているためである.
2.4 スピン波デバイス特性のダンピング定数依存性
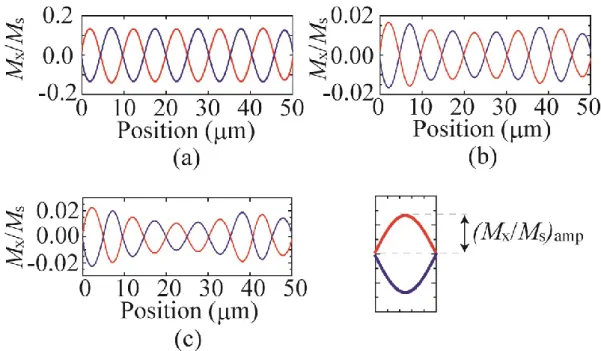
2.1節で述べた3種類の磁気特性 (p_CFA, p_Fe, p_Py)について,同一の磁性 細線形状及び発生器・検出器形状で励起を行った場合の定在スピン波の磁化状態を 図2.8に比較している.同図は,磁化のx方向成分Mxを飽和磁化Msで規格化した
値Mx / Ms(歳差振幅)をスピン波の伝播方向(発生器導体線と直行方向)に沿って示し
たもので,定在スピン波の波形を表している.本シミュレーションでは,図2.1に 示す各形状パラメータの値として以下の値を用いている: 磁性細線幅Lx = 50 m,
磁性細線長Ly = 1000 m, 磁性層厚d = 60 nm, 発生器幅WG = 3.6 m, 検出領域 幅WD = 4.0 m, 磁性細線端部-発生器端部間距離S = 5.5 m.WGとWDについて
~ 20 ~
は,出力電圧が最大となるように最適化している.発生器1と発生器2に印加する 電流強度は1 mAとし,両者の位相差は,出力電力が最大となる に設定している.
各発生器に正弦波状のマイクロ波電流を印加することにより,その作る磁界によっ て図2.1に示したようにスピン波の励起,磁性細線に沿った伝播,干渉が生じ,定 常状態では図2.2のような定在スピン波が形成される.
図2.8に示されるように,比較した3つの磁気特性のうち,p_CFAにおいてスピ ン波振幅が最大であり,他の磁気特性に対して1桁程度大きな値となっている.50
m幅の磁性細線に対する2つの検出器の占有幅は14 %と局所的であるが,p_CFA では,磁性細線の全幅にわたってほぼ等しい振幅のスピン波が励起されている.こ れは,p_CFAのダンピング定数( = 0.001)が,p_Fe( = 0.005), p_Py( = 0.01)に比 べ小さく,伝播過程でのスピン波の減衰が小さいためである.最もダンピング定数 が大きいp_Pyでは,検出器直下のスピン波振幅は,発生器直下の60 %に減衰して いる.
図2.8 磁気特性の異なる3種の磁性細線における定在スピン波の波形 (a) p_CFA, (b) p_Fe, (c) p_Py
~ 21 ~
図. 2.9 は,磁性細線内でのスピン波振幅のx成分 (Mx / Ms)amp および出力電圧 (Vout)の励起周波数依存性を示している.複数のピークに対応する周波数は,高次 定在波の共鳴周波数に対応しており,その次数nは,スピン波波数k,磁性細線幅 Lxによりn = kLx/ のように表される.スピン波波形のシミュレーション結果か ら,各ピークは2次から16次までの定在スピン波共鳴に対応することが確認され た.スピン波振幅が最大となるのは,2 次 (p_CFA), 4 次(p_FA, p_Py)であるの に対して,出力電圧が最大となるのは,いずれの磁気特性においても10次となっ ている.これは,高次モードになるほどスピン波共鳴周波数が高く,漏れ磁界の時 間微分が増大するためである.P_CFAの最大出力電圧は82 V/m2·mAであり,他
図 2.9 異なる磁気特性の磁性細線に対するスピン波励起特性の比較.
歳差振幅の励起周波数依存性: (a) p_CFA, (b) p_Fe, (c) p_Py 出力電圧の励起周波数依存性: (d) p_CFA, (e) p_Fe, (f) p_Py
~ 22 ~
の磁気特性に比べ3倍以上大きな値となっている.また,出力電圧の周波数スペク トルも急峻であり,動作の周波数選択性にも優れている.これらの結果から,スピ ン波媒体の開発に際しては,ダンピング定数の低減が重要であることが示唆される.
2入力間の位相差によるスピン波様態の違いを誘導法によって電気信号に変換す ることにより,位相比較器への応用が可能である.スピン波の位相比較機能への応
図2.10 (a) 種々のダンピング定数に対する出力電圧の位相差依存性
(b) 位相差変化に対する出力電圧の線形応答範囲
(c) 位相差を変化させたときの定在スピン波波形の違い
~ 23 ~
用に関して,2 つの発生器に印加するマイクロ波電流の位相差()と出力電圧との 関係,および各位相差に対するスピン波の波形を図. 2.10に示す.本シミュレーシ ョンでは,p_CFAの磁気特性を基に,ダンピング定数を変化させて,位相比較器と しての性能を比較している. = °の場合,磁性細線端部と中央部がスピン波の 腹となるような定在波が形成されているが ,の増加と供に波形が変化し,
=°では,端部と中央部が節となるような定在波に変化する様子が示されて
いる(図2.10(c)).図2.10(a) に示されるように,ダンピング定数の値が小さいほど,
位相差から出力電圧への変換効率が大幅に改善される.すなわち, = 0.001におけ る誘導出力電圧の値 (Vout = 0.62 mV / m2) は, = 0.01における誘導出力電圧の値 (Vout = 0.07 mV /m2) の8.9倍程度である.出力電圧のに対する変化は, = 60°
~ 120°の範囲ではほぼ線型である(図2.10(b)).非線形領域においても,外部回路 やソフウェアによって補正を行うことにより,線形性を改善できるものと考えられ る.位相比較動作の感度等について精密な評価を行うためには,スピン波に及ぼす 熱擾乱の影響を等価的なランダム磁界として取り入れた確率的シミュレーション が必要とされる.しかしながら,本研究で想定している金属強磁性材料のキュリー 温度は,通常のデバイス動作温度よりも十分に高いことから本シミュレーションで は熱擾乱の影響は考慮していない.
図 2.11(a)は,種々のダンピング定数について,出力電圧Voutとスピン波振幅 (Mx
/ Ms)amp の励起周波数fexc依存性を表している.図から,ダンピング定数の減少に伴 い出力電圧とスピン波振幅は共に増大するが,両者ともそのスペクトル形状はダン ピング定数に依存せずほぼ同じであり,各モードのスピン波共鳴周波数にもダンピ ング定数依存性がないことが分かる.
位相比較機能の動作応答時間を評価するため,発生器1と発生器2に印加するマ イクロ波電流の位相差を0°から180°へステップ的に変化させた時の出力電圧
~ 24 ~
の時間変化を図. 2.12に示している. = 0°での出力電圧は小さく, = 180°に 変化の後,出力電圧は細かく振動しながら増大し,一定値に緩和している.細かな 振動は,スピン波が定在波として定常状態に達するまでの過渡的な状態に対応して いる.出力電圧の時間変化に対する指数関数フィッティングから評価される過渡応
図 2.11 (a) ダンピング定数の異なる磁性細線におけるスピン波励起スペク
トルの比較, (b) スピン波励起特性のダンピング定数依存性
~ 25 ~
答の緩和時間は, = 0.001の場合5.4 ns, = 0.004では1.7 nsである.この結果 は,低ダンピング定数の磁性体を用いた場合でも ns オーダーの応答時間を実現で きることを示しているが,ダンピング定数が小さいほど,緩和時間が長くなってい ることから,過渡応答速度とスピン波励起の低電力性能とは,相反性能となること が示唆される.
図2.13にスピン波の伝搬距離とダンピング定数の関係を示す.磁性細線幅を500
mとし,細線中央部に導体線幅3.6 mの発振器を配置している.磁性細線中央に
図2.12 (a) 位相差のステップ変化に対する出力電圧の時間変化
(b) 遷移時間とダンピング定数の関係
~ 26 ~
励起されたスピン波は端部に向かって伝播する.ダンピング項によって表される磁 気的エネルギーの散逸によって,伝搬距離の増大とともに,スピン波の歳差振幅が 指数関数的に減少している.ダンピング定数が大きいほど,歳差振幅の減衰が顕著 となり,スピン波の伝搬距離が短くなることが分かる.
2.5 微細化によるスピン波励起特性の向上
定在スピン波共鳴特性に対する 細線幅 Lx の微細化の効果を図 2.14 に示してい る.本シミュレーションでは,Lx = 50 mを基準値として,40 %および20 %に微細 化した場合の効果について検討した.他のサイズと励起電流の振幅はこれまでと同 じ値を用いた.同図に示すように,誘導出力電圧の値は Lxの短縮化に従い増加し ている.さらに,各モードの共鳴周波数も,微細化によって上昇することが分かる.
微細化以外に電力効率を改善する方法としては励起源幅WGを増加させる方法が挙 げられる.これは誘導出力電圧Voutが導体線幅WGの2乗に比例するためである.
導体線幅WGを変化させても,共鳴周波数には影響が出ない.
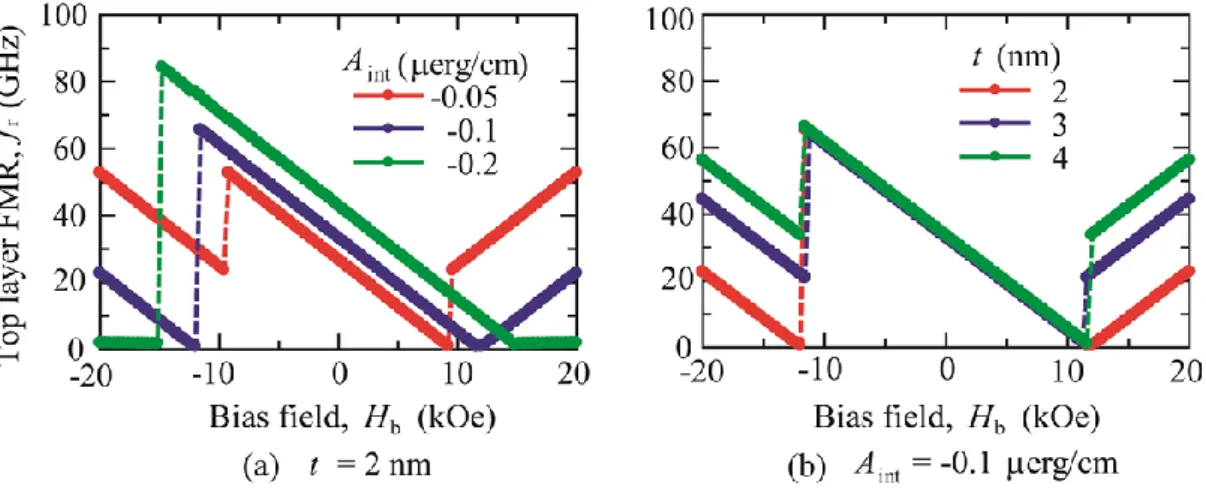
定在スピン波共振周波数の外部バイアス磁界依存性について,シミュレーション 結果と次式で表される理論値との比較を図 2.15 に示す.両者が比較的よく一致
図2.13 スピン波伝搬距離とダンピング定数の関係.
~ 27 ~
していることから,有限長媒体におけるスピン波定在波の分散関係は,無限長媒体 スピン波と大差がないことが分かる.
𝑓𝑟𝑒𝑠= 𝛾
2𝜋[(𝐻𝑘+ 𝐻𝑏)(𝐻𝑘+ 𝐻𝑏+ 4𝜋𝑀𝑠) + 4(𝜋𝑀𝑠)2(1 − 𝑒−2𝑘𝑑)]1/2 (2.17)
図2.14 磁性細線の微細化によるスピン波励起特性の変化
(a) 細線幅 Lx = 20 m, (b) Lx = 10 m
100 150 200 250 300 350 400 0 2
4 6 8
H bias (Oe)
Fre que nc y (G H z)
10th mode 8th mode 4th mode 2nd mode Theory Value
Simulation Value
図2.15 スピン波共鳴周波数の外部磁界依存性.
~ 28 ~
2.6 結言
本章では強磁性細線と入出力用導体線から構成されるスピン波応用デバイスの 基本構造を提案し,スピン波の位相を情報とし,その干渉状態を誘導法により電気 信号に変換することで,論理演算機能や位相比較機能への応用が可能であることを 示した.スピン波の伝播媒体とする強磁性細線について,Fe,FeNi 合金(パーマロ イ),Co2FeAlハーフメタルの3種の磁性材料を想定した磁気特性を用いて動作特性 の比較を行い,CoFeAl 等のダンピング定数の小さな材料を用いることが,出力電 圧の増大に特に有効であることを示した.一方,ステップ的な位相変化に対する応 答時間は,ダンピング定数が小さくなるほど長くなる傾向にあるが,ダンピング定
数0.001程度の磁性材料においても数ナノ秒の高速応答が可能であることを示した.
また,出力用導体線を蛇行形状とすることにより,磁性細線との誘導結合が強まり 出力が増大できることを示した.
~ 29 ~
参考文献
1 C. S. Tsai, J. Su and C. C. Lee, IEEE Trans. Magn., 35, 3178 (1999).
2 N. Cramer, D. Lucic, R. E. Camley and Z. Celinski, J.Appl. Phys., 87, 6911 (20000).
3 V. V. Kruglyyak, S. O. Demokritov and D. Grundler, J. Phys.. D., 43, 264001 (2010).
4 M. Covington, T. M. Crawford, and G. J. Parker, Phys. Rev. Lett.,88, 237202 (2002).
5 K. Sekiguchi, K. Yamada, S. M. Seo, K. J. Lee, D. Chiba, K. Kobayashi, and T. Ono, Appl. Phys. Lett., 097, 022508 (2010).
6 V. E. Demidov, M. P. Kostylev, K. Rott, J. Munchenberger, G. Reiss and Demokritov, Appl. Phys. Lett., 99, 082507 (2011).
7 C. Clausen, K. Vogt, H. Schafer, B. Obry, G. Worf, P. Pirro, B. Veven and B. Hillebrands, Appl. Phys. Lett., 99, 262505 (2011).
8 C. Mathieu, J. Jorzick, A. Frank, S. O. Demokritov, A. N. Slavin and B. Hillebrands, Phys. Rev. Lett., 81, 3968 (1998).
9 Z. K. Wang, M. H. Kuok, S. C. Ng, D. L. Lockwood, M. G. Cottam, K. Nielsch, R. B.
Wehrspohn and U. Gosele, Phys. Rev. Lett., 89, 027201 (2002).
10 A. Barman, V. V. Kruglyak, R. J. Hicken, J. M. Rowe, A. Kundrotaite, J. Scott and M.
Rahma, Phys. Rev. B., 69, 174426, (2004).
11 Y. S. Gui, N. Mecking and C. M. Hu, Phys. Rev. Lett., 98, 217603 (2007).
~ 30 ~
第 3 章 磁気異方性の変調による省電力スピン波励起
3.1 序言
スピン波の微弱な電力による励起や操作は,スピン波応用デバイスの実用化に際 して重要な課題である.近年,この課題への取り組みに応用可能な物性として,パ ラメトリックポンピング(Parametric Pumping: PP)1と電圧制御磁気異方性Voltage- Controlled Magnetic Anisotropy: VCMA)2の研究が精力的に推進されている. PPは スピンダイナミクスの非線形性に起因したスピン波の励起機構であり,周波数選択 性に優れた短波長 SW の励起が,強磁性酸化物であるイットリウム鉄ガーネット
(Yttrium Iron Garnet: YIG)や3-5,強磁性金属薄膜で実験的に確認されている6-12. 電圧により強磁性体の磁気異方性を人為的に変化させるVCMAは,低電力での磁 化方向変化が可能であることから,MRAM (Magnetic Random Acess Memory)におけ る情報書き込みへの応用も期待されている.通常,局所領域への磁界印加は,導体 線への通電により行われるが,VCMA では磁化方向を変化させるのに電流を伴わ ないためジュール損失を生じないことが大きな特長である13-15.
スピン波デバイスの集積性及び高速性を追及するためには,動作周波数を定める スピン波共鳴周波数の増大と情報を担うスピン波の波長短縮が重要となる.大きな 垂直磁気異方性を有する磁性薄膜においては,スピン波共鳴周波数の増大とスピン 波波長の短縮を供に実現でき16,また,膜面内方向に等方的なスピン波伝播特性を 呈するためスピン波デバイスの材料として有望である 17,18.しかしながら,反面,
その大きな磁気異方性がスピンの歳差運動を抑制するため,垂直磁気異方性膜にお けるスピン波の長距離伝播は重大な課題になっている.本章では,垂直磁気異方性 を有するサブm長の磁性細線において,VCMAにおけるスピン波励起の局所性と,
~ 31 ~
PP の非線形的な励起特性が相乗的に活用されることを示すと供に,論理演算機能 への応用可能性とその設計指針を明らかにする.
3.2 シミュレーションモデル
図 3.1 は,VCMA によるパラメトリック SW励起の基本動作特性を解析するた めのデバイス構造の概略図を示している.本構造は,垂直磁気異方性により磁化が 膜面と垂直方向を向いた磁性細線(以下,垂直磁化細線と称す)と,その上部に絶縁 層を介して配した導体線(発生器)から構成される.導体線への電圧印加により直 下の垂直磁気異方性(PMA)が局所的に変調される.本章では,CoFeB / MgO多層 膜などの界面に由来する垂直磁気異方性を有する垂直磁化細線を想定し,以下のよ うな構造および磁気特性を仮定した.膜厚t = 0.8 nm,飽和磁化Ms = 1600 emu/cc,
交換スティフネス定数A = 1.0 erg/cm,垂直磁気異方性磁界Hk⊥ = 20 kOe,ジャイ ロ磁気定数 = 1.76x107 rad/s・Oe,ダンピング定数 = 0.01. PMAの電圧誘起変調 は,垂直磁化細線の導体線直下部分のHkを正弦波状に時間変化(振幅 Hk)させるこ とによって模擬した.実験値として報告されている垂直磁気異方性エネルギーの変
調量が数10 J/ m2であることから,本章でのシミュレーションでは最大500 Oeの
Hk を仮定した(32.5 J/m2の変調量に相当).PMA 変調によって励起されるス
図3.1 電圧誘起スピン波励起のシミュレーションモデル
~ 32 ~
ピン歳差運動のシミュレーションは,第2章と同様,Landau-Lifshitz-Gilbert方程式 を数値的に積分することによって行っているが,本章のシミュレーションでは,パ ラメトリックポンピング(PP)における磁気モーメントの初動を起こすため,揺動散 逸定理に基づくランダム磁界を導入している.解析対象とするスピン波の波長が,
垂直磁化細線の短軸長及び膜厚に比べて小さく,磁化の主要な方向変化は細線の長 軸方向に沿って生じることを考慮し,磁化方向は磁性細線の膜厚方向と短軸方向に は一様と仮定した.この仮定のもと,細線を長軸方向に1 nmの計算格子に離散化 し,セル間の静磁気相互作用は,表面磁荷モデルにより計算した.
3.3 垂直磁気異方性の変調によるパラメトリックスピン波励起
図 3.2(a)は,長軸長Lx = 400 nm,短軸長Ly = 100 nmの垂直磁化細線を,Hk =
500 Oe の変調強度で励起したときの,細線中央部における歳差運動振幅の細線長
軸(短軸)方向成分mx (my)および励起周波数(fexc)依存性を示している.図に示される 図3.2 電圧励起スピン波の共鳴特性 (Lx = 400 nm)
(a) 歳差振幅(最大値)の励起周波数依存性
(b) 歳差運動における面内磁化成分の軌跡
(c) 異方性実効磁界と磁化成分の時間変化
~ 33 ~
ように,fexc が 4.24 GHz以上になると,歳差振幅が急激に増大し,fexc = 4.26 GHz で最大値をとった後,それ以上の励起周波数では周波数の増加に伴い歳差振幅は比 較的緩やかに減少している.fexcが4.40 GHz以上になると歳差運動が生じなくなる.
図3.2(b)は,歳差振幅が最大となるfexc = 4.21 GHzにおける歳差運動の軌跡を示し
ている.形状磁気異方性により,歳差運動軌跡は垂直磁化細線の長軸方向(x 方向) を長軸とする楕円形状となっている.図3.2(c)は,異方性実効磁界(Hk) ,及び細線 中央部磁化の x,z 方向成分の時間変化を表している.異方性実効磁界は,垂直磁 化細線の垂直磁気異方性磁界(Hk⊥)に電圧による変調分を重畳した値を表している.
同図のHkとmxの時間変化に示されるように,歳差運動の1周期は,励起源となっ ている Hkの時間変化の 1/2 の周期となっており,パラメトリック励起現象が生じ ていることが分かる.また,Hk とmzの時間変化が同一周期であることから,磁化 の膜厚方向成分の振動が垂直磁気異方性の変調に同期して増幅され,膜面内の歳差 運動を誘発していることが示唆される.Hk が最大及び最小となるとき,磁化は膜 面内を向いており,Hk が平均値をとるときに磁化の膜厚方向成分は最大となって いる.
パラメトリック励起の発現機構について詳細な解析を行うため,共鳴周波数で励 起したときの歳差運動に係わる静磁界 Hst,異方性実効磁界 Hk,交換実効磁界 Hex
及びそれらの総和Hallの各時間変化を図3.3,3.4に示している.図3.3は第2章で 定義した移動極座標表示におけるθ方向成分,図 3.4 はφ方向成分を示している.
第2 章で述べたように,歳差周波数は実効磁界のθ方向成分により決まり,また,
歳差振幅は実効磁界のφ成分によって決まる.
図3.3に示されるように,異方性実効磁界の変化と同期して,静磁界と交換実効 磁界の変化が生じている.静磁界と異方性実効磁界の大きさは時間平均して約5000 Oe であるが,逆向きで打ち消しあっている.実効磁界のθ方向成分の総和は時間
~ 34 ~
平均して 250 Oe であり,これが歳差運動に寄与している.図3.4 に示される実効
磁界のφ方向成分において,正の符号はダンピング項と同方向,すなわち歳差振幅 を増大する方向に作用していることを,また,負の符号は歳差振幅を減少させる方 向に作用していることを表している.従って,磁気的エネルギーの散逸に抗して歳
図3.3 パラメトリック励状態における各実効磁界の時間変化 (θ成分).
(a) 異方性実効磁界HK-, (b) 交換実効磁界Hex-, (c) 静磁界Hst-, (d) 実効磁界(総和) Hall-
図3.4 パラメトリック励起状態における各実効磁界の時間変化 ( 成分).
(a) 異方性実効磁界HK-, (b) 交換実効磁界Hex-, (c) 静磁界Hst-, (d) 実効磁界(総和) Hall-
~ 35 ~
差運動の維持に直接的に寄与しているのは,唯一正符号となっている静磁界である ことが分かる.この静磁界は,磁化の膜面垂直方向成分によって膜表面に生じる磁 荷に起因するものである.
上記のように,垂直磁化細線において垂直磁気異方性の変調によってスピン波を パラメトリック励起するためには,細線形状に起因した形状磁気異方性によって歳 差運動軌跡が楕円形状となり,磁化の膜面垂直方向成分が時間変化することが要件 となっている.スピン波デバイスの高集積化に際しては,磁性細線の微細化が必須 となるため,微細な磁性細線においてもパラメトリック発振に繋がる形状磁気異方 性効果が生じることを検証することが必要である.図 3.5は,長軸長Lx = 100 nm,
短軸長Ly = 20 nmの垂直磁化細線に対し,図3.1のような発生器(幅WG= 10 nm)を
想定し,強度(Hk) 500 Oeの垂直磁気異方性変調を与えた場合のシミュレーション 結果を示している.図3.2(a)に示したLx = 400 nm,短軸長Ly = 100 nmの場合と同
図3.5 電圧励起スピン波の共鳴特性 (Lx = 100 nm, Hb = 0 Oe ) (a) 歳差振幅(最大値)の励起周波数依存性
(b) スピン波の波形
(c) 細線短軸方向磁化成分のフーリエ変換
~ 36 ~
様,非対称な周波数スペクトルを有する共鳴励起が生じており,共鳴周波数(5.44
GHz) 以下では歳差振幅が急激に減少するが,共鳴周波数以上の領域での歳差振幅
の減少は比較的緩やかである(図3.5(a)).図3.5(c)は共鳴励起状態における磁化の細 線短軸方向成分 myについて,その時間変化を離散フーリエ変換し,歳差運動を周 波数領域で表したものである.同図における最大振幅に対応する周波数が2.72 GHz であることから,歳差周波数が励起周波数の1/2となっており,本形状の細線にお いてもパラメトリック励起が生じていることが分かる.図3.5(b)は共鳴励起状態に おける,細線長軸方向に沿った myの変化を示している.磁性細線の中心部で振幅 が最大となり,両端で最小となる1次モードの定在スピン波が生じている様子が示 されている.端部においても磁化は歳差運動を行っており完全に閉じた定在波には なっていないが,これは,この励起周波数でのスピン波の波長が細線の長軸長より も大きいためと考えられる. 図 3.6 は垂直磁気異方性磁界及び各磁化成分の時 間 変 化 波 形 を , 磁 化 ベ ク ト ル の 軌 跡 と 対 応 さ せ て 表 し て い る . 同 図 に お い
図 3.6 垂直磁気異方性の変調により励起された楕円歳差運動状態における磁化の 時間変化と磁化ベクトルの軌跡
~ 37 ~
ても,歳差運動に対応する磁化の面内成分 myが励起源である垂直磁気異方性の時 間変化の 1/2の周波数である様子がみてとれる.垂直磁気異方性磁界が最小となる 図中の時刻Aで,磁化の膜厚方向成分mzは最大となり,垂直磁気異方性磁界が最 小となる時刻Bでmzは最大となっている.すなわち,垂直磁気異方性磁界の変化 に対して,磁化は逆向きに応答しており,みかけ上負の磁化率を呈している.すな わち,磁化は垂直磁気異方性磁界の時間変化に対して1/2周期()の位相遅れを生じ ており,励起磁界の時間変化に対して1/4周期(/2)の位相遅れを生じる通常の強磁 性共鳴励起の動特性とは異なっていることが分かった.細線形状に由来し,磁性細 線の長軸方向が形状磁気異方性の容易方向となるため,歳差運動軌跡は同図に示さ れるようにその長軸が磁性細線の長軸方向となる.このため,垂直磁気異方性磁界 の時間変化に対する,磁化面内成分の応答は一意に決まり,垂直磁気異方性が最小
図3.7 異なる励起周波数に対する磁化成分の時間変化比較 (パラメトリック励起)