ピッチ運動する車両模型の動的空力特性に及ぼす 地面移動・ホイール回転の影響
6
0
0
全文
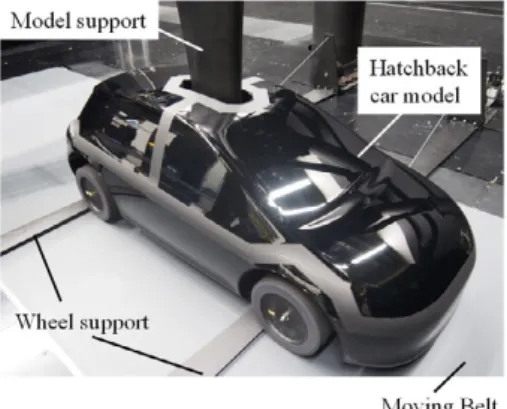
(2) ピッチ運動する車両模型の動的空力特性に及ぼす地面移動・ホイール回転の影響. 2.2. 計測条件. 3.CFD 解析. 図 2 に示す姿勢を基準に,模型のピッチ角θを式(1)のとおり. 3.1. 計算方法 図 3 に CFD 解析モデルの概要を示す.. 正弦波状に変化させ,そのときの空気力を測定する.. Fig. 2 Coordinate system and dimensions of the car model 𝜃𝜃�𝑡𝑡� � � ��� 2𝜋𝜋𝜋𝜋𝜋𝜋. (1). Fig. 3 Overview of the computational domain. ここで,各記号の定義は下記のとおりである. Θ. : 加振振幅 [deg]. f. : 加振周波数 [Hz]. t. : 時刻 [s]. 計算対象は,測定対象と同じ 28%ハッチバック車模型であるが, ホイール支持棒,模型支持棒,支持棒を通すための模型上部の 穴を省略し,ホイール形状を簡略化してある. 入口流路面積とモデル前方投影面積の比として算出したブロッ ケージ比は約 1.3%であった.入口は一定流速(30 m/s),出口は. 地面移動とホイール回転がない場合(以下,fix)と,地面移動・. 圧力一定(0 Pa)とし,fix では床面およびホイール表面に滑りなし. ホイール回転がある場合(以下,rot)のそれぞれについて,風速. 条件を課し,rot では床面に主流速,ホイール表面に回転(53.4. 30 m/s,加振振幅 2 deg, 加振周波数 1,2,3,4 Hz の条件で測定. rps)に相当する速度条件を設定した.. を行った.. 計算には STAR CCM+ Ver.10.02.012 を使用し,LES による非. 各条件について,通風状態での測定と併せ,無風状態での測. 定常計算を行った.SGS モデルには WALE モデルを使用し,時. 定値を行い,通風状態での測定値から差し引くことで,加振時に. 間刻みを 5.0×10-4 秒とした.計算格子(図 4)には非構造格子の. 発生する模型質量の慣性力を取り除く.また,振幅 -2 deg から 2. ポリヘドラル格子を使用し,壁面にはプリズムレイヤーを 4mm 間. deg まで 0.5 deg 刻みでピッチ角を静的に変化させた測定を行い,. に4層配置した(格子間隔が最小となる模型背面部において).ボ. 静的空気力を算出する.. デー部と床面・タイヤ部を別領域としたオーバーセット格子系を使. 動ひずみ測定器のローパスフィルタカットオフ周波数を 300 Hz. 用し,ボデー領域のみをピッチ加振させた.格子数は全体で約. (2 次バターワース型),サンプリング周波数を 1000 Hz に設定し,. 480 万であった.. 各ケース 20 秒ずつ測定を行った.以下では,測定データから動 的空気力を算出する手順を示す. 2.3. 解析方法 測定データに,加振周波数の 2.5 倍をカットオフ周波数とする デジタルローパスフィルタ(7 次バターワース型)を適用し,最初と 最後の加振周期を除いた位相平均を算出する.通風状態での位 相平均値より,無風状態での位相平均値を差し引くことで,模型 質量により発生する慣性力を取り除き,動的空気力を算出する. このとき,無風状態での測定値には,模型の質量による慣性力と. Fig. 4 Overview of the computational grid. ともに,付加質量(模型まわりの空気の質量)による慣性力も含ま れる.このため,求めた空気力は付加質量による慣性力が取り除. 3.2. 計算条件. かれたものとなる.. 計算は加振振幅 2 deg,加振周波数 2,4 Hz の条件について実. これと併せて,静止状態での測定データの,全時刻にわたる平. 施した.非定常計算を 12 周期分おこない,最後の 10 周期分の結. 均値を,静的空気力として計算する.. 果を解析に使用した.計算結果より位相平均を算出する際には, 加振周波数の 2.5 倍をカットオフ周波数とするデジタルローパスフ ィルタ(7 次バターワース型)を適用した.. 自動車技術会論文集 Vol.52,No.4,July 2021.. 809.
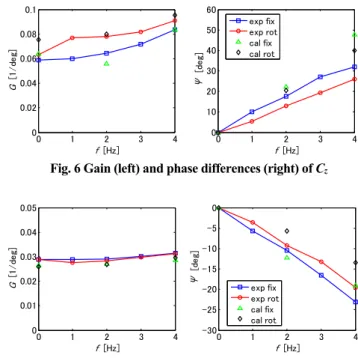
(3) ピッチ運動する車両模型の動的空力特性に及ぼす地面移動・ホイール回転の影響. また,これらと併せて, -2 deg, 0 deg,2 deg の条件について. (2) 周波数応答. 静止状態での計算を行った.加振計算と同様のモデルを用いて 2. 基準姿勢からのピッチ角の変化と空力係数の変化の関係が線. 秒間の非定常計算を行い,最後の 1 秒間の平均値を計算するこ. 形であると仮定し,その特性をゲイン G と位相差Ψにより表すこと. とで,静的空気力を求めた.. で,fix と rot の差を明らかにする. ゲインと位相差の算出手順を以下に示す. ①. 4.結 果 と 考 察. 空力係数変化の位相平均波形を最小二乗法により三 角関数(周波数は加振周波数と同じ)で近似する. 4.1.地面移動・ホイール回転の影響 ②. 以上の手順に従い算出した空気力から,式(2),(3)に示す空. 近似した三角関数の振幅とピッチ角変化の振幅との比 をゲインとして算出する. 力係数を求め,その値の変化から,動的空力特性の変化を調査 ③. する.本研究では六分力のうち,ピッチ運動と関係性の高い,揚. 近似した三角関数とピッチ角変化との位相のずれを位 相差として算出する. 力係数とピッチングモーメント係数について解析を行った.. 図 6 に Cz,図 7 に Cmy のゲインと位相差の周波数特性を fix と 𝐶𝐶� � 𝐶𝐶�� �. 𝐹𝐹�. 1 � 𝜌𝜌𝜌𝜌 𝐴𝐴 2. (2). 1 � 𝜌𝜌𝜌𝜌 𝐴𝐴𝐴𝐴 2. (3). rot で比較して示す.なお,測定結果(図中 exp)と併せ,計算結果 (図中 cal)も記載した. 測定結果より,ピッチ角変化に対して Cz は位相進み,Cmy は位. 𝑀𝑀�. 相遅れとなり,周波数が高くなるほど,どちらも位相差が大きくなる ことがわかる.また,Cz のゲインは周波数が高いほど大きくなり, Cmy のゲインはほぼ一定値となる. さらに,fix と rot の差についてみると,rot では,Cz において,ゲ. ここで,各記号の定義は以下の通りである. Cz. : 揚力係数[-]. インが大きく,位相進みが小さくなり,Cmy においては,ゲインは変 化せず位相遅れが小さくなる.. Cmy. : ピッチングモーメント係数[-]. Fz. : 揚力[N]. My. : ピッチングモーメント[Nm]. の周波数特性とその fix と rot での差について定性的に再現でき. ρ. : 空気密度[kg/m3]. ているといえる. よって次節では,更なる詳細解明のため,計算. U. : 主流流速[m/s]. 結果(加振周波数 4 Hz)を対象に非定常空気力モデルの考え方. L. : 模型全長[m]. を適用することで,姿勢角,角速度,角加速度との関係を調査す 2]. : 前方投影面積[m. る.. 加振周波数 4 Hz における空力係数 Cz,Cmy の測定結果(点+ G [1/deg]. 実線)を,静的空気力の測定結果(点)と併せ,図 5 に示す.ここ で,Cz は時計回り,Cmy は反時計回りのリサージュ図形になってい る.この結果より,fix と rot でリサージュ図形の傾き(ゲイン)と膨ら. 0.1. 60. 0.08. 50. 0.06 0.04 0.02. み(位相差)が変化していることが確認される.これらの変化は, fix と rot で動的空力特性が変化していることを表しており,以下で. 0 0. 30 20 10. 1. 2. 3. 0 0. 4. 1. 2. 3. 4. f [Hz]. Fig. 6 Gain (left) and phase differences (right) of Cz. 0 -0.02. 0.2. -0.04. fix static rot static fix rot. 0.05. 0. 0.04. -5. Cmy. Cz 0. G [1/deg]. -0.06. 0.1. -0.08 -0.1 -0.12. -0.1. -1. 0. θ [deg]. 1. 2. -0.16 -2. 0.03 0.02 0.01. -0.14 -0.2 -2. 40. exp fix exp rot cal fix cal rot. f [Hz]. は,その詳細を周波数応答から明らかにする. 0.3. Ψ [deg]. (1)姿勢角に対する変化. Ψ [deg]. A. 一方,計算結果をみると,定量値は異なるが,ゲイン,位相差. -1. 0. 1. 0 0. 2. Fig. 5 Lissajous curves of the transient aerodynamic loads and. -15 -20 -25. 1. 2. f [Hz]. θ [deg]. -10. 3. 4. -30 0. exp fix exp rot cal fix cal rot 1. 2. 3. f [Hz]. Fig. 7 Gain (left) and phase differences (right) of Cmy. static loads for fix and rot cases at forcing frequency of 4Hz. 自動車技術会論文集 Vol.52,No.4,July 2021.. 810. 4.
(4) ピッチ運動する車両模型の動的空力特性に及ぼす地面移動・ホイール回転の影響. 4.2.影響の内訳 上記手順により Cz,Cmy について求めた各項の振幅の値を fix. (1)非定常空気力モデルによる分離評価 河上ら. と rot で比較して図 8 に示す(加振周波数 4 Hz).. (4)は,変位項,速度項,加速度項を足し合わせた非定. 常空気力モデルにより,Ahmed 模型の縦方向運動時の動的空気 力変化をよく表現できることを示している.本節ではハッチバック. 0.2. 車模型についてもこの考え方を適用できるものと仮定し,CFD 解. 0.15. 析の結果を対象に,fix と rot で各項を比較することで,移動地面・. 0.1. タイヤ回転の影響の内訳を調査する.各項のゲイン・位相差の算. 0.05. 出方法は佐藤ら (5)の方法に従った.以下にその手順を示す.. 0. 変位項,角速度項,角加速度項の比例係数を C1,C2,C3 として,. C1*. C2* fix. 空力係数の変化 ΔC を各項の足し合わせにより式(4)で表す.. C3*. rot. (a)Cz. ∆𝐶𝐶�𝑡𝑡� � 𝐶𝐶� 𝜃𝜃�𝑡𝑡� � 𝐶𝐶�. �. 𝑑𝑑𝑑𝑑�𝑡𝑡� 𝑑𝑑 𝜃𝜃�𝑡𝑡� � 𝐶𝐶� 𝑑𝑑𝑑𝑑 𝑑𝑑𝑡𝑡 �. 0.06. (4). 0.04 0.02. 式(1)を式(4)に代入すると,式(5)になる.. 0. ∆𝐶𝐶�𝑡𝑡� � 𝐶𝐶�∗ 𝑠𝑠𝑠𝑠𝑠𝑠�2𝜋𝜋𝜋𝜋𝜋𝜋� � 𝐶𝐶�∗ 𝑐𝑐𝑐𝑐𝑐𝑐�2𝜋𝜋𝜋𝜋𝜋𝜋� � 𝐶𝐶�∗ 𝑠𝑠𝑠𝑠𝑠𝑠�2𝜋𝜋𝜋𝜋𝜋𝜋�. -0.02. (5). C1*. C3*. -0.04 fix. ここで,C1*,C2*,C3*は各項の振幅を表し式(6)のとおりである. 𝐶𝐶�∗ � 𝐶𝐶� 𝛩𝛩, 𝐶𝐶�∗ � 𝐶𝐶� 𝛩𝛩�2𝜋𝜋𝜋𝜋�, 𝐶𝐶�∗ � 𝐶𝐶� 𝛩𝛩�2𝜋𝜋𝜋𝜋��. C2*. rot. (b)Cmy. Fig. 8 Comparison of coefficients of each term in. (6). unsteady aerodynamic load model as in eq. (5). 式(5)において,各三角関数を合成することで式(7)になる.こ この結果より,Cz については,rot で C1*が大きくなり,C3*が小さ. のときゲインと位相は各項の振幅により式(8),式(9)のとおり表さ れる.. くなることから,式(8),式(9)より,ゲインが大きくなり,位相進みが (7). ∆𝐶𝐶�𝑡𝑡� � 𝐺𝐺𝛩𝛩 𝑠𝑠𝑠𝑠𝑠𝑠�2𝜋𝜋𝜋𝜋𝑡𝑡 � 𝑠𝑠� 𝐺𝐺 �. 小さくなったことがわかる.同様に Cmy については,rot で C2*の絶 対値が減少し,C3*の絶対値が増加することから,ゲインが変化せ ず,位相遅れが小さくなったと理解できる.このため以下では,動. ��𝐶𝐶�∗ � 𝐶𝐶�∗ �� � 𝐶𝐶�∗ �. 的空力特性に特有な現象といえる,Cmy の C2*の変化に着目し,そ. (8). の詳細を考察する.. 𝛩𝛩. (2)影響の大きい領域. 𝐶𝐶�∗ 𝑠𝑠 � ��𝑐𝑐𝑡𝑡�𝑠𝑠 ∗ 𝐶𝐶� � 𝐶𝐶�∗. (9). はじめに,上記変化への寄与度の大きい領域を明らかにする. 模型表面を 9 つの領域に分け,各領域の Cmy の C2*を比較する. 図 9 に領域の分け方と各領域の名称を示す.模型全体の C2*を. 各項の比例係数のうち,C1 を式(10)のとおり静的な姿勢変化. 算出したのと同様に,領域ごとの Cmy の C2*を求め,その結果を fix. 時の空力係数の勾配として求める.また,式(8),式(9)より C2,C3. と rot で比較して図 10 に示す.. はそれぞれ式(11),式(12)のとおり表され,これに 4.2 節で求め. この結果より,rot では多くの領域において Cmy の C2*の絶対値. たゲインと位相差を代入することでその値を求める. 𝑑𝑑𝑑𝑑 𝐶𝐶� � � � 𝑑𝑑𝑑𝑑 ��� 𝐺𝐺 𝑠𝑠𝑠𝑠𝑠𝑠 𝑠𝑠 𝐶𝐶� � 2𝜋𝜋𝜋𝜋. 𝐶𝐶� �. 𝐶𝐶� � 𝐺𝐺 𝑐𝑐𝑐𝑐𝑠𝑠 𝑠𝑠 �2𝜋𝜋𝜋𝜋��. が小さくなり,特に btm2(床下中央),rwh(リヤホイールハウス)に おいてその変化が大きいことがわかる.ところで,模型全体の Cmy. (10). の C2*は rot でその絶対値が小さくなっている.また,模型全体の Cmy の C2*は,各領域の Cmy の C2*の足し合わせになる.このため, btm2,rwh における Cmy の C2*の絶対値の減少が,模型全体での. (11). 値の減少に最も寄与しているといえる.よって以下では,btm2, rwh について,圧力分布と流れ場の観点から,変化の詳細を明ら. (12). かにする.. 自動車技術会論文集 Vol.52,No.4,July 2021.. 811.
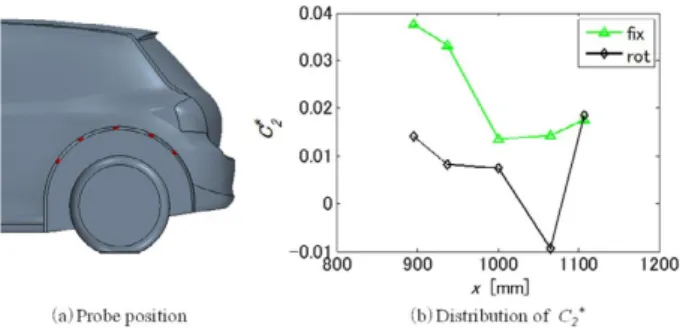
(5) ピッチ運動する車両模型の動的空力特性に及ぼす地面移動・ホイール回転の影響. への寄与は,回転中心の前後でその符号が変わり,回転中心か らの距離と値が同じであれば相殺されるため,モーメントアームの 長い切り上げ部直後の極大値の影響で btm2 における Cmy の C2* は負の値になる. fix と rot の違いについてみると,rot では回転中心より上流側で 値が一様に大きくなり,切り上げ部直後の極大値は小さくなってい ることから,rot における Cmy の C2*が fix よりも絶対値が小さくなっ. Fig. 9 Domains for detail investigations. たことがわかる. ・. 0.004. C2 *. -0.002. = 440 mm)における床下の位相平. 均速度分布を,ピッチ角速度が最大となる位相 0 deg(頭上げ),. 0.002 0.000. 流れ場. C2*の差が最大となる位置(x. back btm1 btm2 btm3 btms fwh rwh side top. 最小となる位相 180 deg(頭下げ),静的な場合について,fix と rot で比較して図 12 に示す.. fix rot. -0.004. この結果より,fix,rot 共に頭上げ時には流れが減速され,頭下 げ時には流れが加速されることがわかる.この流速変化に伴い床. -0.006. 下圧力が変化し,頭上げ時には高圧,頭下げ時には低圧となる.. -0.008. Area. Fig. 10. C2*. このとき,ピッチ角速度と床下圧力の変化は符号が一致しており,. of Cmy at each domain. ピッチ角の変位,加速度がゼロであることから,式(5)より,btm2 に おける圧力係数変化の C2*は正の値になる. そのうえで,rot では地面移動の効果により,fix よりも流速変化. (3) 床下中央の変化詳細. が大きくなっており,これが回転中心より前方における圧力係数. ・. 変化の C2*が大きくなった原因と推測される.. 圧力分布. btm2 における変化の詳細を明らかにするため,図 11(a)に赤 丸で示したプローブ位置における圧力係数変化について,空力 係数変化より C2*を求めたのと同様の手順により C2*を求め,その 結果を fix と rot で比較して図 11(b)に示す.. Fig. 11 C2* of the pressure coefficient fluctuation at btm2 Fig. 12 Phase-averaged velocity distributions under btm2. この結果より,btm2 における圧力係数変化の C2*は全域で正の 値をとり,回転中心付近で最大になり,床下切り上げ部直後に極 大値(図中矢印)を持つことがわかる.各位置の圧力変化の Cmy. 自動車技術会論文集 Vol.52,No.4,July 2021.. 812.
(6) ピッチ運動する車両模型の動的空力特性に及ぼす地面移動・ホイール回転の影響. fix では,頭上げ時にホイールハウス内側で上に向かう流れ場. (4) リヤホイールハウスの変化詳細 ・. 圧力分布. が形成され,頭下げ時には外側からの流入が増加するとともに,. rwh における変化の詳細を明らかにするため,図 13(a)に赤丸. ホイールハウス内側の流れが弱くなっている.. fix. 一方,rot についてみると,ホイール回転の影響により fix と流れ. と rot で比較して図 13(b)に示す.fix では,rwh 全域において圧. 場が異なり,頭上げ時には fix で見られた上に向かう流れが発生. 力係数変化の C2*が正の値になるため,rwh における Cmy の C2*. せず,頭下げ時には外側からの流入がホイールハウス入口付近. が負の値になる.一方 rot では,fix よりも圧力係数変化の C2*が全. に衝突している.このとき,頭下げ時には流入がホイールハウスに. C2*の絶対. 衝突することで高圧になり,ピッチ角速度と圧力係数変化の符号. で示したプローブ位置における圧力係数変化の. C2*の分布を. 域で小さく,負の値になる箇所もみられるため,Cmy の. が逆になるため,C2*が負の値になる.. 値が小さく,ゼロに近い値になる.. 5.ま と め 動的空気力に,地面移動とホイール回転が及ぼす影響を調査 するため,ハッチバック車模型のピッチ運動を対象に,風洞実験 と CFD 解析を実施した.得られた知見を以下にまとめる. 1.. 地面移動とホイール回転は,ピッチ角変化時の動的空 気力について,揚力のゲインを大きくし,位相を進め, ピッチングモーメントの位相を遅らせる効果がある.. 2.. 比例した空気力の変化によって生じており,その変化. Fig. 13 C2* of the pressure coefficient fluctuation at rwh ・. このうちピッチングモーメントの変化は,おもに角速度に は,床下中央とリヤホイールハウスで顕著に表れる.. 3.. 流れ場. 床下中央においては,地面移動により床下流れの加減 速が促進されることで,リヤホイールハウスにおいては,. この変化の原因となる流れ場を明らかにするため,rot の C2*が. ホイール回転でホイールハウスに衝突する流れが発生. 負の値になり,顕著な違いがみられる位置(x = 1065 mm)におけ. することで,これらの変化が発生したと推測された.. る位相平均速度ベクトル分布を,ピッチ角速度が最大となる位相 0 deg(頭上げ),最小となる位相 180 deg(頭下げ)について,fix. 参 考 文 献. と rot で比較して図 14 に示す.. (1) P. Aschwanden, J. Müller and U. Knörnschild : Experimental Study on the Influence of Model Motion on the Aerodynamic Performance of a Race Car : SAE Technical Paper, 2006-01-0803 (2006) (2) 例えば,A. Waschle : The Influence of Rotating Wheels on Vehicle. Aerodynamics. -. Numerical. and. Experimental. Investigations : SAE Technical Paper, 2007-01-0107 (2007) (3) 畔柳 洋, 村田 收, 河上 充佳, 中川 雅樹, 加藤 由博, 吉 田 一徳 : 6 自由度高応答模型加振装置を備えた 1/4 スケール 自動車用風洞 : 自動車技術会学術講演会前刷集, 107-12, pp.13-16 (2012) (4) 河上 充佳, 佐藤 範和, P. Aschwanden, 加藤 由博, 中川 雅樹, 小野 英一 : 動的空力解析に基づく簡易車両模型の非定 常空気力モデル : 日本機械学会論文集(C 編), 76 巻, 768 号, pp.2006-2015 (2010) (5) 佐藤 範和, 河上 充佳, 加藤 由博, 稲垣 昌英, 堀之内 成 明 : ALE 手法を用いた運動する車両周りの非圧縮性 LES 解析. Fig. 14 Phase-averaged velocity vector fields. 第 4 報 ピッチ運動する簡易車両模型の非定常空力解析 : 日本. in the rear wheelhouse from dynamic and. 機械学会論文集(B 編), 77 巻, 773 号, pp.43-55 (2011). static calculations. 自動車技術会論文集 Vol.52,No.4,July 2021.. 813.
(7)
図


+3

関連したドキュメント
バルーントラップを設置したギャップの周りの樹冠下の地上高約1mの位置に設置した(以
Subsequently, the cross-sectional area (CSA) was measured. [Results] CSAs of both type I and II fibers were significantly higher in the ST group than in the HS
c加振振動数を変化させた実験 地震動の振動数の変化が,ろ過水濁度上昇に与え る影響を明らかにするため,入力加速度 150gal,継 続時間
どにより異なる値をとると思われる.ところで,かっ
ベクトル計算と解析幾何 移動,移動の加法 移動と実数との乗法 ベクトル空間の概念 平面における基底と座標系
自動運転ユニット リーダー:菅沼 直樹 准教授 市 街 地での自動 運 転が可 能な,高度な運転知能を持 つ自動 運 転自動 車を開 発
Eskandani, “Stability of a mixed additive and cubic functional equation in quasi- Banach spaces,” Journal of Mathematical Analysis and Applications, vol.. Eshaghi Gordji, “Stability
Finally, in Figure 19, the lower bound is compared with the curves of constant basin area, already shown in Figure 13, and the scatter of buckling loads obtained
