- 1 - 目次 1 第 1 章 序論 3 1.1 背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3 1.2 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5 第 2 章 自動車振動解析 6 2.1 走行試験に当たっての事前検討・・・・・・・・・・・・・・・・・・・・・・ 6 2.2 自動車振動計測・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7 2.2.1 自動車走行試験(普通自動車)・・・・・・・・・・・・・・・・・・・・・ 7 2.2.2 車種による実走行試験比較(軽自動車) ・・・・・・・・・・・・・・・・ 10 2.2.3 加振源による実走行試験・・・・・・・・・・・・・・・・・・・・・・ 11 2.2.4 速度比較及び、乗車人数による比較試験・・・・・・・・・・・・・・・ 12 2.3 実走行試験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13 2.3.1 振動計測データ・・・・・・・・・・・・・・・・・・・・・・・・・・ 13 2.3.2 計測方向、走行路による比較・・・・・・・・・・・・・・・・・・・・ 18 2.3.3 設置場所による比較・・・・・・・・・・・・・・・・・・・・・・・・ 19 2.3.4 車種による比較・・・・・・・・・・・・・・・・・・・・・・・・・・ 20 2.3.5 加振源・非加振源による比較・・・・・・・・・・・・・・・・・・・・ 21 2.3.6 速度比較と、乗車人数比較・・・・・・・・・・・・・・・・・・・・・ 22 2.4 走行試験まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 24 第 3 章 圧電デバイス特性評価実験 25 3.1 バイモルフ圧電素子の仕様・・・・・・・・・・・・・・・・・・・・・・・・ 25 3.2 はじき実験に対する四つ圧電デバイスの特性実験・・・・・・・・・・・・・ 27 3.2.1 実験概要・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 27 3.2.2 圧電デバイスの無負荷実験・・・・・・・・・・・・・・・・・・・・・ 29 3.2.3 圧電デバイスの負荷実験・・・・・・・・・・・・・・・・・・・・・・ 34 3.2.4 圧電デバイスの負荷整合・・・・・・・・・・・・・・・・・・・・・・ 38 第 4 章 圧電デバイスのエネルギーハーベスティング効率実験 46 4.1 効率測定理論式の導出・・・・・・・・・・・・・・・・・・・・・・・・・ 46 4.2 効率測定実験概要・・・・・・・・・・・・・・・・・・・・・・・・・・・ 50 4.3 圧電デバイス無負荷効率実験・・・・・・・・・・・・・・・・・・・・・・ 52 4.4 圧電デバイス負荷効率実験・・・・・・・・・・・・・・・・・・・・・・・ 54 4.5 負荷整合を考慮した圧電デバイス効率実験・・・・・・・・・・・・・・・・ 56
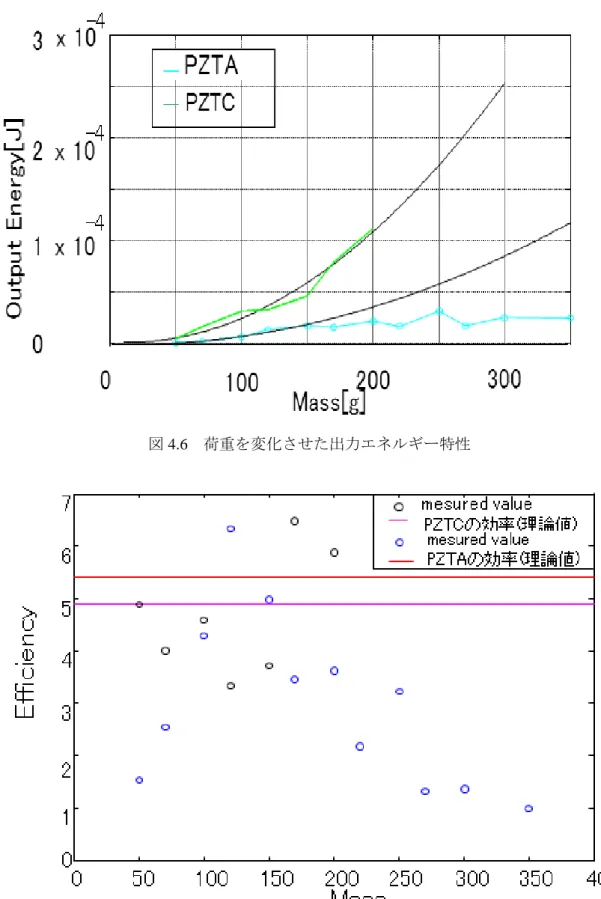
- 2 - 4.6 荷重依存性検証効率実験・・・・・・・・・・・・・・・・・・・・・・・ 57 4.7 ひずみゲージによる最適形状の解析・・・・・・・・・・・・・・・・・・ 60 第 5 章 多モード振動発電デバイスの評価実験 73 5.1 多モード振動発電デバイス概要・・・・・・・・・・・・・・・・・・・・・・ 73 5.2 多モード振動発電デバイスのシステム同定・・・・・・・・・・・・・・・・・ 75 5.3 荷重依存性検討効率実験・・・・・・・・・・・・・・・・・・・・・・・・・ 78 第 6 章 まとめ 81 参考文献 83 発表論文 85
- 3 -
第 1 章 序論
1.1 背景
20世紀後半より、化石燃料の排出する温室効果ガスにより地球温暖化問題が顕在化して きている。この地球温暖化防止策として、使用エネルギーの削減技術やエネルギーハーベ スティングに基づく新しいエネルギー利用技術が注目され、低炭素化社会、スマート社会 の実現が望まれている[1]。また、最近では電子機器の低消費電力化に伴い、汎用的な振動発 電技術が開発されつつあり[2],[3]、今後、構造物や医療におけるヘルスモニタリングやワイヤ レスセンサネットワーク、スマートビルディングなどへの導入が期待されている。 また、2011 年 3 月 11 日の東日本大震災での福島第一原子力発電所の事故以降、発電技術 のあり方や、電力使用法などを見直す考え方が広まって来ており、環境にやさしく、且つ 安全な発電方法が望まれている。その中で、注目されているのがエネルギーハーベスティ ング技術という、使用されていない、もしくは捨てられているエネルギーを回収して、電 気エネルギーに変換する技術である。その中で太陽光発電、風力発電は実用化が進んでい るが、振動発電[4],[5]に関しては 、少ない発電量、効率的発電周波数の狭さに起因して実用 化が進んでおらず、社会実験などによる試験的な試みとして一部利用されてきている程度 である。特に振動源を多く有する自動車分野では、その実用化例は極めて少ない。 一方、自動車分野では低排出ガス化・高燃費化が責務となりつつある。自動車分野は、 振動エネルギーが豊富であり、CO2の排出が多く低炭素化効果が大きく、振動発電導入によ る効果が大きい。近年では、LED やモータ、ワイヤレス通信機器などにも低消費電力機器 が導入されてきているが、振動発電デバイスの実用化例は皆無である。そこで、振動発電 低消費電力デバイスに対するセルフパワード技術、すなわちバッテリーによる電源供給で はなく、ハーネス不要で分散した発電・供給技術の要求も強く、振動発電デバイスによる エネルギー回生技術が望まれる。 現在、対象分野となる運輸部門の CO2 排出量は 2009 年において約 2.3 億 t である。本 課題で開発する振動発電システムを自動車に搭載し、車両振動エネルギーを電気エネルギ ーとして回生することで、燃料消費量を 3%低減できれば年間約 7 百万 t の CO2 低減が可 能となる。これにより、日本の年間温室効果ガス排出量削減目標(CO2 換算)の 9%低減が達 成できる。また、セルフパワード技術による配線の不要化、同デバイスによる振動低減効 果なども考慮すると、それ以上の効果が得られると期待できる。 このように、エネルギーハーベスティング技術として、ひとつの電力源となり得るデバ イスの開発の要求は強く、導入対象とする自動車分野でも、無駄に消費されているエネル- 4 -
ギーを、付加価値として導入できることは、大きなメリットとなり得る。しかし、出力電 力の小ささが、問題となることから、構造や振動の解析による改善が実用化の鍵となる[6]
- 5 -
1.2 目的
本研究では、自動車振動を回生するデバイスの開発を目的とする。自動車は多くの振動 を発生しているが、ゴムやショックアブソーバーなどで振動を吸収してしまい、熱エネル ギーとして無駄に消費されている。この振動のエネルギーを回生することで、散逸される エネルギーを活用できる形として取り出す。ここでは、自動車に汎用的にあと付けで導入 できる構造を目的とするため、発電素子としてはピエゾ(Piezoelectric element)式の素子を用 いる。PZT 圧電デバイスを用いるメリットとして、構造がシンプル(素子+起歪体)であるこ と、振動方向に対し三軸方向で検出可能(起歪体形状により)、質量が軽量であることが挙げ られる。 PZT 圧電デバイスを用いた振動発電において課題となるのは、①発電エネルギーが少な い、エネルギー効率が低い、②効率的に発電するための振動周波数が限定されている、③ 耐久性に劣るという点が挙げられる。それらを解決していくことが、本研究の重要な部分 である。①の問題として、現状の発電デバイスの出力は 5 m W 程度であり、エネルギー回 生を行うためには太陽電池に匹敵する出力レベルと連続的な発電性能が必要となる。②の 問題として、出力でレベルの向上と連続性を両立させるためには、広い周波数帯域で大き さや方向の異なる振動を制御して、発電阻止に伝えることができる振動伝達構造が必要で ある。③の問題として、PZT は脆性材料のため壊れやすい。これらの問題を解決するため に、振動源となる自動車の振動から、よりエネルギーを回収しやすい構造を PZT 圧電デバ イスだけではなく、形状をより工夫して最適な形状を設計した上、負荷整合を考慮し、効 率良く振動エネルギーを回生できるデバイスを考案して評価していくことが必要となる。 そこで、本論文では、自動車振動の解析結果より、自動車振動に特化した振動発電デバ イスの構造を考案し、形状が異なる PZT 圧電デバイスの発電特性を解析し、負荷整合を考 慮したエネルギー効率が最も良い PZTA 圧電デバイスを対象として、提案された多モードデ バイスに貼り付け、システム同定による振動発電デバイスの発電特性を評価することを目 的とする。 本論文の構成は以下のようになる。 2 章で自動車振動の振動実験及びその振動解析結果を述べ、3 章で四つ形状が相異なる圧 電デバイスの発電特性評価実験を行い、発電特性が最も良い PZTA 圧電デバイスを調べる。 4 章では PZTA 圧電デバイスを貼り付けた多モード発電デバイスの発電評価実験を行う。 以上から、最適な圧電デバイス形状と負荷整合を考慮したエネルギー効率を検討し、5 章 で本論文のまとめを述べる。- 6 -
第 2 章 自動車振動解析
今回の実験では、自動車の振動を計測し、共振周波数の解析を行なった。本章では、振 動回生に有効な振動特性を解析する[7] 。2.1 走行試験にあたっての事前検討
今回、自動車の実走行試験を行うにあたって、自動車振動の大きい場所や、出現する周 波数の事前解析を行い、デバイスの設置場所、ターゲット周波数を決めた。自動車の振動 の大きい箇所として、自動車の前端、前方、エンジン、バネ下が挙げられる。自動車の前 端は、常にボディ曲げ共振振動の腹になるという理由で推奨設置場所として考えている。 次に、車の前方は、加振源であるエンジンやラジエータ、モータなどが近いことや、サ スペンション振動・エンジンマウント振動ともにフロントの寄与度がほぼそのまま出力さ れるため、設置理由として挙げられる。エンジンは、2 重防振のマウントを利用し、振動の ボディ伝達を減少させているという理由である。最後にバネ下は、今後バネ上がアクティ ブマウント、アクティブマスダンパなどの振動改善により、振動が減少方向となるという 理由からデバイスの設置として考えられる。 一方、自動車の振動の弱い箇所は、サスペンション上やホイールベース中心がある。 サスペンション上は、ボディ曲げ共振を加振しないように、節に設定されており、ホイー ルベース中心はホイールベース共振のバウンス共振が出なくなるため、自動車の中でも振 動が出にくいと場所となっている 次に、デバイスのターゲット周波数帯域としては、10~20 [Hz]がある。これは、車の固 有周波数が 10~20 [Hz]であることと、これに同調した共振(エンジン共振、サスペンション 共振など)があるホイールベース共振の 2 次振動の自動車の感度が高い、などといた理由 から推奨ターゲット周波数と考えている。また、高域側として 12~30 [Hz]がある。この周 波数帯域は、ホイールベースにより異なるが、ボディ曲げ共振がでるため、ターゲット周 波数と成り得る[8]。 これらの点を考慮したうえで、自動車実走行試験を行う。- 7 -
2.2 自動車振動計測
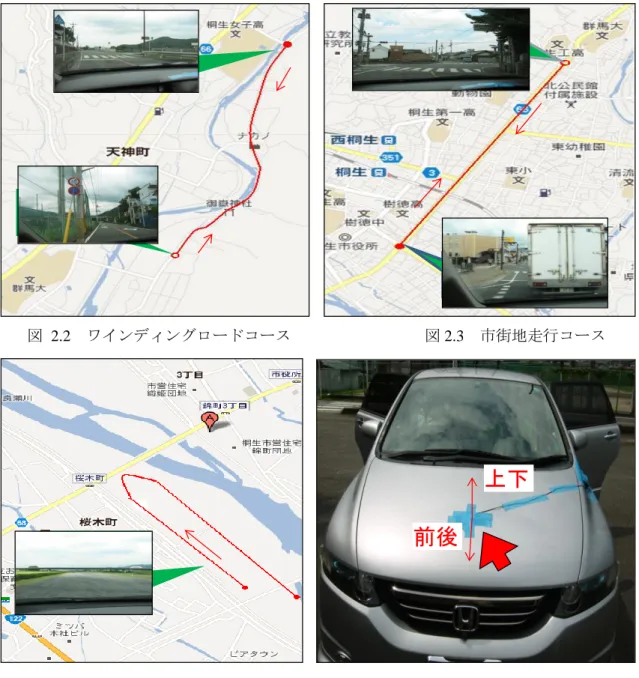
本実験では、自動車に特化した微小振動発電デバイス開発におけ、自動車振動解析を行 った。実験方法は、加速度センサを自動車の各部分に張り付け、加速度センサからの出力 データを取得し、解析を行う。計測方法としては、計測時間 100s、サンプリング時間 1ms とし加速度センサからの出力信号を取得した。各種詳細条件を、表 1 に示す。 表 1 自動車実走行試験に対する試験条件 計測器 オシロスコープ(帯域 200 [MHz]) 計測時間 100 [s] サンプリング時間 1 [ms] センサ 加速度センサ(3 軸) 計測信号 加速度[G/V] 計測方向 鉛直、水平方向 センサ帯域 DC ~100[Hz] データ数 100k[point] 計測回数 各ルートで 2 回 2.2.1 自動車走行試験(普通自動車) 走行実験は計測車を、普通自動車である Honda ODESSEY とし実験を行った。実際の走行 車の写真は図 2.1 に示す。走行ルートとしては、ワインディングロード、市街地走行、未 舗装路の 3 か所のデータを取得した。各走行路の概要は図 2.2 ~図 2.4 に示す。坂が多く、 アップダウンが多い道をワインディングロードとし、舗装されていない砂利道を未舗装路 とした。段差などのないフラットな道で、自動車のストップアンドゴーのデータも取得で きるよう信号もある道を市街地とし、計測を行った。加速度センサの設置場所としては、 ダッシュボード、トランク、ボンネットの 3 か所に設置した。一例として、ボンネットに 加速度センサを張り付けた写真を図 2.5 に示す。計測方向が前後と上下の振動となるよう にセンサ方向を設置している。- 8 - 図 2.1 計測車 Honda ODESSEY 表 2 普通自動車計測条件 計測条件 車種 Honda ODESSEY 走行路 ワインディングロード 市街地走行 未舗装路 センサ設置箇所 ダッシュボード トランク ボンネット
- 9 -
図 2.2 ワインディングロードコース 図 2.3 市街地走行コース
図 2.4 未舗装路コース 図 2.5 ボンネット設置箇所
上下
前後
- 10 - 2.2.2 車種による実走行試験比較(軽自動車) 車種による振動の比較を行うため、普通自動車の計測に続き、軽自動車での走行実験を 行った。計測車種は軽自動車である、Mitsubishi eK-sport を用いた。実際の自動車を図 2.6 に 示す。走行ルートは、ワインディングロード、市街地走行、未舗装路の 3 か所としデータ を取得した。加速度センサの設置場所は、ボンネット中央、ドアミラー、フロントフェン ダー、ボンネット裏に設置した。 風の影響を調べるため、ボンネット裏での測定を行った。ドアミラーは、片持ち梁とい う構造や、風の影響も受けるため、振動が大きいと予測し測定箇所とした。フロントフェ ンダーは、ボンネット中央の弾性率の違いを比較するため計測箇所とした。 設置箇所の一例として、加速度センサをボンネット上に張り付けた写真を図 2.7 に示す 以上の計測条件を、表 3 に示す。 図 2.6 軽自動車 Mitsubishi eK-SPORTS 図 2.7 ボンネット中央の設置の様子 表 3 軽自動車計測条件 計測条件 車種 Mitsubishi eK-SPORTS 走行路 ワインディングロード 市街地走行 未舗装路 センサ設置箇所 ボンネット中央 ドアミラー フロントフェンダー ボンネット裏
上下
前後
- 11 - 2.2.3 加振源による実走行試験 振動減として大きな振動が生じていると予測したため、エンジンに加速度センサを設置 し計測を行った。計測車は Honda ODYSSEY を用い、走行路は、ワインディングロード、 市街地走行、未舗装路の 3 か所とした。走行路は、2.2.1 節と同じコースとした。設置場所 はエンジンに加速度センサを設置し、計測を行った。エンジンの部分温度を調べ、加速度 センサの限界温度に達しないエンジンを覆っている樹脂でできたカバーの上に加速度セン サを設置した。エンジンに加速度センサを設置した写真を図 2.8 に示す。 図 2.8 エンジン設置箇所 表 4 エンジン設置走行計測条件 計測条件 車種 Honda ODESSEY 走行路 ワインディングロード 市街地走行 未舗装路 センサ設置箇所 エンジン
上下
前後
- 12 - 2.2.4 速度比較及び、乗車人数比較による実走行試験条件 計測車両は Honda ODYSSEY とし、乗車人数を 5 人と 2 人、走行速度を 15-30km/h と 20-40km/h と変化させた条件で計測を行なった。設置箇所は、エンジンとトランク内の二箇 所とし、計測信号は加速度信号、計測時間を 100 [s]としている。加速度センサを設置した 箇所を、図 2.9 に示す。 図 2.9 設置箇所(左)エンジン (右)トランク内 表 5 普通自動車計測条件 計測条件 車種 Honda ODESSEY 走行路 ワインディングロード 市街地走行 未舗装路 センサ設置箇所 エンジン トランク 上下 上下 前後
- 13 -
2.3 実走行試験結果
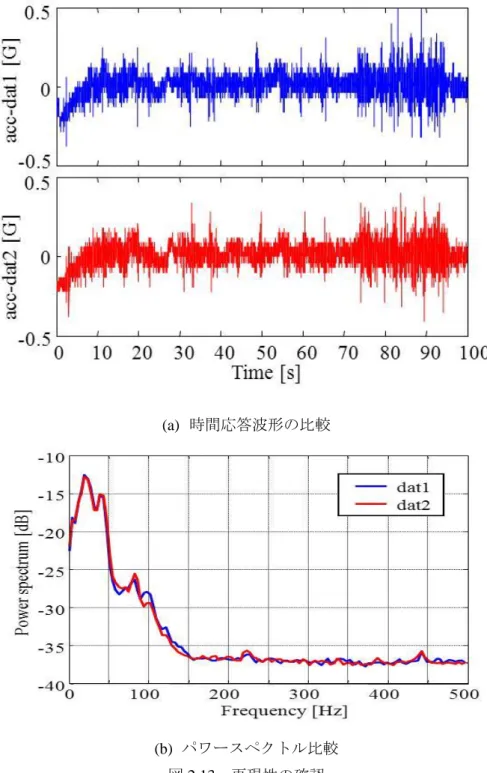
本章では、前章の振動計測実験の計測結果を述べると共に、各計測箇所や、走行路の計 測データを比較し、振動が大きく生じる条件を特定し、デバイスの開発において有効とな るような、自動車特有の振動特性を特定することを目的とする。 2.3.1 振動計測データ 本節では、普通自動車における、走行路とセンサの設置箇所の計測信号比較を行う。図 2.10 に、走行路をワインディングロードとし、各設置場所をダッシュボード、トランク、 ボンネットの時間応答波形を示す。鉛直方向には重力分(-1V)のオフセットを生じる。水平 方向、鉛直方向とも同じ場所で振動の影響を確認できる。設置箇所により、振動の大きさ に差があり、ボンネットの振動が最も大きいことがわかる。図 2.11 に市街地と未舗装路の ボンネットでの時間応答波形を示す。市街地では、信号などによる加減速時に水平方向で 20~30[s]間のような影響がみられ、未舗装路では、水平・鉛直方向共に振動が大きく検出 されていることが確認できる。次に、図 2.12 で各設置箇所における、パワースペクトル密 度を示す。各上図が上下方向の振動で、下図が水平方向のスペクトルとなっており、走行 路、設置箇所、計測方向により、振動特性に違いがあることが確認できる。 ここで、計測の再現性を確認するために、同一条件で二回測定したデータの比較を行う。 走行路をワインディングロード、設置場所をダッシュボード、計測方向を水平方向とした ときのデータの時間応答波形とパワースペクトルを図 2.13 に示す。図より、二つの計測デ ータは一致しており、同一箇所計測での振動特性(時間応答/周波数応答ともに)の再現性が 高いことがわかる。また、上下方向と水平方向の相関についての図を図 2.14 に示す。比較 データは走行路 ワインディングロード、計測場所 ダッシュボード上での鉛直方向と水 平方向の相関解析の結果である。同一実験では、特定の周波数で鉛直と前後の振動相関が 見られることが確認できる[9]。- 14 - (a) ダッシュボード上(往路) (b) トランク (c) ボンネット 図 2.10 走行路をワインディングロードとしたときの各設置場所の時間応答波形 (a) 市街地 (b) 未舗装路 図 2.11 各走行場所の時間応答波形
- 15 -
(a) ダッシュボード上 (b) トランク
(b) ボンネット
- 16 -
(a) 時間応答波形の比較
(b) パワースペクトル比較 図 2.13 再現性の確認
- 17 - 図 2.14 相関解析
- 18 - 2.3.2 計測軸方向、走行路による比較 計測軸方向での比較 図 2.15 に軽自動車のボンネット上での計測データとなる、鉛直方向と水平方向の加速度 に対する各走行路におけるパワースペクトルを示す。図より、ほぼ全域にわたって鉛直方 向のスペクトルが大きい。また、振動モードが複数現れるが、その周波数は水平方向と鉛 直方向で変化しないことも確認できる。よって、計測方向による違いは、周波数に関係な く、スペクトルの大きさのみに関わる。 走行路による比較 図 2.15 の線の色の違いは、各走行路を示している。水平方向、鉛直方向いずれも振動周 波数は大きく変化はないが、スペクトルの大きさが変化することが確認できる。よって、 走行路の違いは、スペクトルの大きさに影響すると考えられる。 図 2.15 軽自動車ボンネットでのパワースペクトル(上)鉛直 (下)水平
- 19 - 2.3.3 設置場所による比較 図 2.16 にフロントフェンダーとドアミラー上で計測したデータを示す。計測車両は軽自 動車、計測軸方向は鉛直方向である。この画像の比較より、計測場所により振動周波数が 変化することが分かる。また、ドアミラー上は 2 次モード(43Hz 近傍)の振幅が大きく、設 置箇所により、共振の大きさも変化すると考えられる。 よって、設置箇所の変化では、周波数特性に影響があると考えられる。 図 2.16 計測場所による振動スペクトルの比較(上)フロントフェンダー (下) ドアミラー
- 20 - 2.3.4 車種による比較 ミニバン(オデッセイ)と軽自動車でのスペクトルを図 2.17 に示す。実験条件は、いずれ もボンネット、水平方向での結果である。図の比較から、振動周波数が車種によって異な る。ミニバンの振動周波数が 12[Hz]、31[Hz]、50[Hz]、軽自動車の振動周波数が 15[Hz]、62[Hz]、 109[Hz]と、振動周波数が高域側に現れることが確認できる。これは、軽自動車では重量が 軽量であることが原因であると考えられる。 図 2.17 計測車両による比較(上)ミニバン (下)軽自動車
- 21 - 2.3.5 加振源、非加振源による比較 加振源であるエンジンと、加振源から離れたドアミラーとのスペクトルの図を 2.18 に示 す。図の比較より、エンジンの方が大きな波形が確認できる。特に、鉛直方向での波形は、 ドアミラーに比べて、非常に大きい。よって、加振源付近は、推奨設置箇所として考えら れる。 図 2.18 エンジンとドアミラーのパワースペクトル
- 22 - 2.3.6 速度比較と乗車人数比較 ここではデバイス設置後に変化する条件のデータ比較を目的とし、速度の変化と、乗車 人数の変化による比較を行う。 速度による比較 設置箇所をエンジン、走行路をワインディングロードして、走行速度を変更した走行 データのスペクトルを図 2.19 に示す。速度が変化しても、周波数に大きな変化が無いこと が確認でき、速度の増加に伴い、スペクトルが増大している。よって、速度変化により周 波数特性は変化せず、スペクトルの大きさのみに関与することが確認できた。 図 2.19 エンジンでの速度変化による比較(上)鉛直 (下)水平
0
50
100
150
200
250
300
-30
-10
0
20
Frequency [Hz]
P
o
w
er
S
p
ec
tr
u
m
[
d
B
]
-20
40km/h
20km/h
10
0
50
100
150
200
250
300
Frequency [Hz]
-30
-10
0
20
P
o
w
er
S
p
ec
tr
u
m
[
d
B
]
-20
10
40km/h
20km/h
- 23 - 乗車人数による比較 設置箇所をエンジン、走行路をワインディングロードして、乗車人数を変更した走行デ ータのスペクトルを図 2.20 に示す。乗車人数が変化しても、スペクトルの大きさや、周波 数に大きな変化が無いことが確認できる。よって、乗車人数の変化は、生じる振動への影 響は少ないことが確認できる。 図 2.20 エンジンでの乗車人数による比較(上)鉛直 (下)水平
0
50
100
150
200
250
300
-30
-20
-10
0
10
20
Frequency [Hz]
P o w er S p ec tr u m [ d B ]5人
2人
0
50
100
150
200
250
300
-30
-20
-10
0
10
20
Frequency [Hz]
P
o
w
er
S
p
ec
tr
u
m
[
d
B
]
5人
2人
- 24 -
2.4 走行試験まとめ
比較結果より、振動のスペクトルは走行路や走行速度など、設置後に変動する条件によ り変化する。そして、振動の周波数はセンサの設置箇所や、車種など取り付けの段階で決 まる条件で定まることが分かる。よって、以上の実験結果より、スペクトルの大きい箇所 に設置し、その設置箇所と車種に合わせた、振動発電構造が適していると考えられる。- 25 -
第 3 章 発電特性試験概要
3.1 バイモルフ圧電素子の仕様
PZT(チタン酸ジルコン酸鉛)とは、圧電セラミックスの一種である。圧電素子というのは 別名ピエゾ素子とも呼ばれ、振動や圧力が加わると、歪みを生じて電圧に変換し(圧電効 果)、あるいは逆に、電圧がかかると、伸縮しながら歪みを生ずる(逆電圧効果)。実例と して発電床、無電池ワイヤレス通信設備などがある[10] 。 巨大な誘電率および圧電性、強誘電性をもち、原料が比較的安価なため大量生産する ことができ、比較的分極を引き起こしやすいために好感度、電気結合係数が大きく、使用 した PZT 圧電デバイスはすべてバイモルフという型であるが、電界に対し変位が大きいと いう長所を持っている。一方で、耐久性に欠け、発電エネルギーが小さいという短所が存 在する。耐久性という点に関しては PZT 圧電デバイスプレートの間にアルミ板を入れるな どして改善されている。圧電性が大きいためにアクチュエータやセンサ、圧電素子として 使われることが多い。圧電素子に関していくつかの型がありそれぞれに特徴を有している。 圧電材料のプレートが一枚のユニモルフ、プレートが二枚のバイモルフ、プレートが多数 重ねられている積層型などの型がある。 図 3.1 で示した使用した PZT 圧電デバイスはすべてバイモルフ型となっており、PZTA と PZTB 圧電デバイスは市販されているものである。PZTC、PZTD 圧電デバイスに関しては共 同研究先の提案構造として用いた PZT 圧電デバイスになり、特注製作されている[11]。先に、 述べたように、PZTA、PZTC、 PZTD 圧電デバイスに関しては PZT 圧電デバイスプレート がアルミ板をはさむ構造をとっている。対して、PZTB 圧電デバイスのみアルミ板などの金 属材料によって強化されていない構造であり、いずれもパラレル接続となっている。また PZTA 圧電デバイスは非常に剛性の高い材質でできておる。一方 PZTD 圧電デバイスは細長 い形状をしており、柔性に富んでいる。PZTC 圧電デバイスは台形形状をしており、応力解 析を用いて先端の応力に対し曲率が一定となるように設計されたものである。それら PZT 圧電デバイスの細かい仕様に関しては表 6 に載せている通りである。以下に圧電セラミッ クスの基本的性質を述べる[12]。- 26 - 図 3.1 実験で使用した PZT 表 6 PZT の仕様 種類 特性値 PZTA PZTB PZTC PZTD PZT 有効面 積[mm2] 250 299 263 114 メーカー 日本セラ テック 日本セラテ ック タムラ製作 所 厚さ[mm] 0.6 0.55 0.8 縦[mm] 13.4 10 4.0 横[mm] 28 40 33.0
PZTA
PZTB
PZTC
PZTD
- 27 -
3.2 はじき実験に対する四つ圧電デバイスの特性実験
3.2.1 実験概要 本節では、振動発電用の圧電デバイスとし、4 種類の特徴的な PZT 圧電デバイス(PZT A,B,C,D)を選定した。この発電性能に関する評価を行い、デバイスに最適な PZT 圧電デバ イスを選定する。実験構成について以下に説明する。PZT 圧電デバイスを図 3.2 のようにク ランプして固定し、その先端の変位量としてレーザー変位計を用いて変位量を測定した。 それぞれの PZT 圧電デバイスに灰色のシムが付いている理由は、同じ素子を使って実験す る時にクランプするのだが、クランプする時に同じ素子を使っていてものに毎回違う場所 をクランプしてしまっては特性が異なるため、同じ場所を毎回クランプできるようにする ためにシムをつけている。こうすることによって同じ素子を使った時に、より厳密性を持 って比較することが出来る。フラップ棒は梁のような物で、XY ステージに固定されており 0.1mm という単位で動かすことができる。PZT の初期位置からステップ加振として、XY ス テージを用いて、0.1、0.2、0.3、0.4mm などの任意の入力として PZT を押し込むことで加 える。その結果 PZT 圧電デバイスは圧電素子であるため、フラップ棒を引きぬいてやるこ とにより電圧出力が発生する。 電圧出力と同時に変位入力を解析することで PZT の振る舞いを解析した。PZT の電圧出 力に関してはオシロスコープ又は DSP を用いて解析した。それらの試験を PZT に負荷抵抗 をつけた場合と負荷抵抗を付けない場合で検証した。実験で解析した計測量に関しては下 に示したとおりである。クランプに関してはシグマ光機製でレーザー変位計は SUNX 製で 分解能は3.5μm となっている。 実験で評価した導出量は以下に示す。(1)
(2)
(3)
(4)
(5)
(6)
ここで、v(t)は出力電圧、T は時間、𝑃𝑚𝑎𝑥はパワーの最大値、𝑉𝑚𝑎𝑥は電圧の最大値、E はエ ネルギー、P(t)は出力パワー、A は面積である。導出量
1. 最大値:最大電圧 [v]
2. 積分値:
3. 実効値:
3
,
2
,
1
,
)
(
0
tv
t
dt
t
3 , 2 , 1 , ) ( 1 0 2
v t dt t T t 3 , ) ( ] J [ 0
P t dt t E t/A
]
J/mm
[
2E
D
R
v
P
max[
W
]
max2/
4. 最大電力:
5. エネルギー:
6. 単位エネルギー:
- 28 - 図 3.2 実験構成写真 以上に示した導出量が実験で評価したものである。それぞれの式に関して簡単に説明す ると、まず初めに(1)最大値は先程も述べたように PZT 圧電デバイスに変位入力としてステ ップ加振を加えると電圧出力が発生し、電圧出力の最大値を取った値になる。(2)式積分値 は電圧出力の絶対値を取り、任意の時間までの積分をした値である。(3)式次に実効値は電 圧出力の 2 乗したものを時間積分し、サンプリング時間で割った値の平方根をとったもの になる。(4)式については(1)で求めた電圧最大値の 2 乗をし、その値を負荷抵抗値 R で割っ たものになる。(5)式出力エネルギーは V(t)2 /R で求めた電力波形の時間積分したものになっ ている。(6)式単位エネルギーに関しては、出力エネルギーの値を先ほど表で示したそれぞ れの PZT 圧電デバイス面積で割ったものとなる。
変位計
PZT
フラップ棒
クランプ
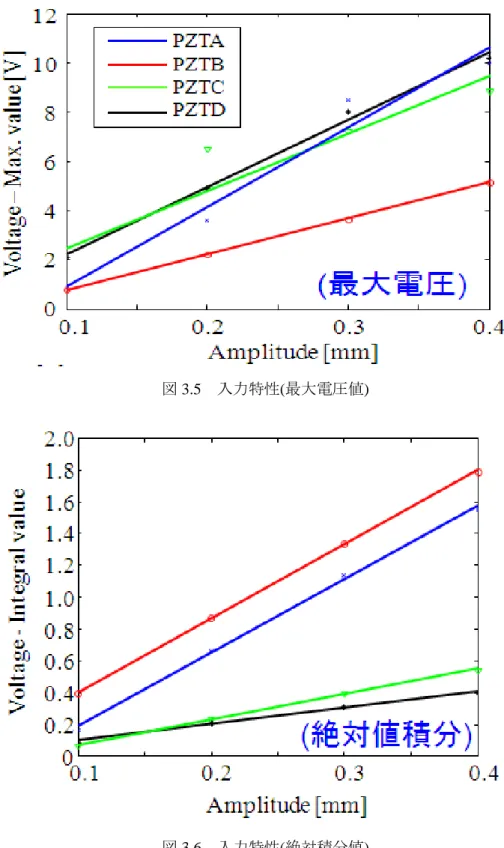
- 29 - 3.2.2 圧電デバイスの無負荷実験 まず初めに無負荷試験を行った。試験の概要は先ほど示したとおりである。図 3.3 と表 7,8,9 はそれぞれ 4 種類の PZT 圧電デバイスに対し、負荷抵抗を付けずに 0.3mm のステップ 加振を加えた場合の波形とそれぞれの数値を示したものである。横軸が時間軸、縦軸が電 圧を示した図になっている。0 秒程度までフラップ棒により初期変位を与えておき、0.05 秒 程度でフラップ棒を引きぬくことによって PZT 圧電デバイスが振動しながら定常値に戻っ ていく様子を示した波形である。 それぞれの PZT 圧電デバイスの出力電圧の特性が出ており、同じ入力変位を与えた時 PZTA 圧電デバイスが最も電圧が大きくなっていることがわかる。他には波形を見ていると PZTB 圧電デバイスの波形において最大電圧値は低いもののなかなか減衰せず、他のものに 比べ長い間電圧が出力されていることが図から読み取れる。加えて、他の波形などもよく 観察するとそれぞれの波形にメカニカルな細かい振動が含まれていることがわかる。この 図では PZTB 圧電デバイスにおいて非常に顕著に出ていると考えられる。 次にそれぞれの表に関して、図 3.3 から見てもわかる通り電圧の最大値は PZTA が大きい ことがわかる。また絶対値積分値に関してはそれぞれ評価する秒数に依存する結果となっ ていることが表よりわかる。1 秒まででは PZTA 圧電デバイスの波形の積分値が大きいとい う結果になっている。これは PZT の波形が最初に電圧の最大値を持つことによるためであ り、その中でも PZTA の電圧値は 4 種類の中では一番大きいために、1 秒までという制限で は PZTA が大きいという結果になることが考えられる。2 秒まで、3 秒までという制限にお いては図 3.3 より PZTB の波形は減衰が少なくほぼ一定と見える様な出力を出している。そ のために、制限時間を増やしていくと他の波形に比べて時間がたっても減衰が少なく一定 出力を出す PZTB 圧電デバイスが最大値となることが考えられる。 最後に実効値に関しては 1 秒、2 秒、3 秒という全ての時間制限において PZTA 圧電デバ イスの値が大きいことがわかる。そもそも実効値とは交流電圧を抵抗負荷に加えた場合と、 ある直流電圧を加えた場合とで交流電圧の 1 周期における平均電力が等しくなるときに、 この交流電圧は先の直流電圧と同じ値の実効値をもつと定義されるものなので仕事の量、 つまり電圧の 2 乗(電力 V(t)2/R)として扱われる。そのために定義に立ち返ってみた時に PZTA 圧電デバイスが一番を大きいのではないかという結果が図 3.3 より考えられる。 補足として、最大電力は先ほどの式(4)を見れば理解できるが、今回の実験では負荷抵抗を 付けない場合の無負荷試験を行ったために、最大電力値を求めるための R が決まらなかっ たため導出に至ってはいない。同様に出力エネルギーも負荷抵抗値が決まらなかったため に導出には至っていない。単位エネルギーに関しては電力値が決まっていないので導出し ていない結果となる。 表 7,8,9 は 4 種類の PZT 圧電デバイスそれぞれに対する評価になっている。
- 30 - 表 7 最大電圧 種類 値 PZTA PZTB PZTC PZTD Vmax [V] 8.06 3.02 6.81 5.85 表 8 絶対値積分 種類 値 PZTA PZTB PZTC PZTD 0~1s 1.40 1.11 0.507 0.226 0~2s 1.43 1.51 0.524 0.233 0~3s 1.44 1.63 0.538 0.240
Time [s]
0
0.1
0.2
0.3
0.4
0.5
-1
0
1
2
3
4
5
6
7
8
9
PZTA
PZTB
PZTC
PZTD
V
o
ltag
e [
V]
図 3.3 無負荷試験電圧波形- 31 - 表 9 実効値 種類 値 PZTA PZTB PZTC PZTD 0~1s 2.17 1.23 1.42 0.76 0~2s 1.53 0.916 1.00 0.54 0~3s 1.25 0.751 0.818 0.44 本実験は先ほど説明した実験概要の写真と同じ実験構成をとり、先ほどの場合は 0.3mm のステップ加振をフラップ棒を用いることで入力したが、本実験においては 0.1、0.2、0.3、 0.4mm と入力量を変化させながらステップ加振を入力した場合の特性を検証する実験であ る。対象としては PZT 圧電デバイス 4 種全てを対象として行った。 図 3.5 と図 3.6、図 3.7 はそれぞれ PZT 圧電デバイスによる出力の最大電圧値、絶対積分 値、実効値を示している。実効値は線形性を有しており、変位である入力量に比例すると いうことが図よりわかる。 図 3.4 実験概要
32
図 3.5 入力特性(最大電圧値)
33
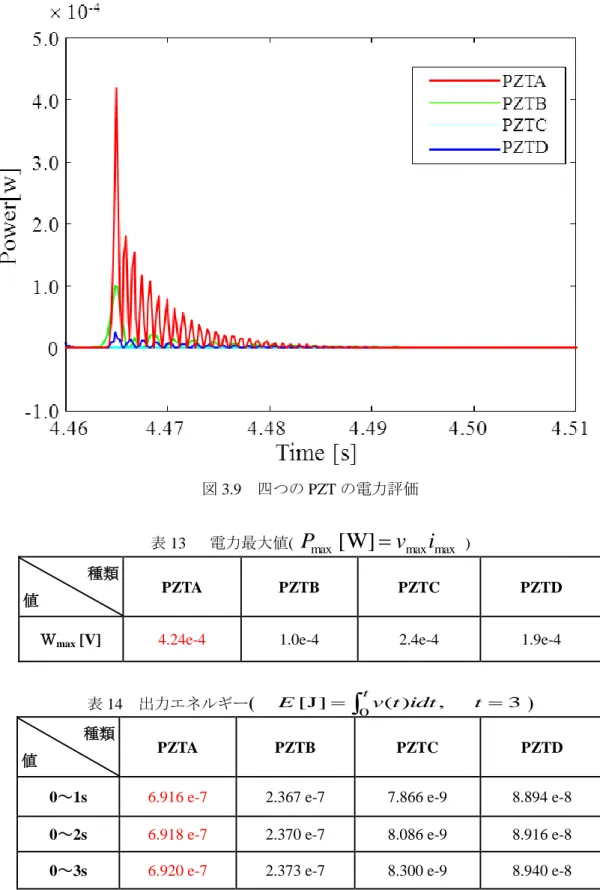
34 3.2.3 圧電デバイスの負荷実験 本実験では先程の無負荷試験との比較として PZT 圧電デバイスに負荷抵抗をつなぎ、 0.3mm のステップ加振を入力した負荷試験を行う。実験構成は同様である。実験結果を以 下に示す。 実験波形は負荷抵抗として1kΩ を負荷したものであるが、今回の図 3.8 の波形を見ると無 負荷の場合と同様に PZTA 圧電デバイスの出力電圧が最も大きいことがわかる。一番顕著と いえるのが負荷抵抗をつなぐことによって、無負荷の場合と比べて波形が変化するという ことである。無負荷の場合の波形ではオフセットを持つような波形であった。一方で、1kΩ を負荷した場合の波形は非常に振動的で細かいメカニカルな振動に加え、低周波による振 動成分が加わってきていることが図 3.8 よりわかる。PZTA 圧電デバイスに関しては包絡し ていく過渡状態に大きな変化は見られないが、無負荷試験では一番減衰が小さかった PZTB 圧電デバイスには無負荷試験と比べ、減衰が少々大きくなっている様子が見られる。 最大電圧値に関してはすべて1kΩ を負荷し、結果として 1 桁小さくなっている事がわか る。先ほど異なり PZTA 圧電デバイスがどの時間制限の範囲に関しても最も大きいことがわ かる。実効値に関しても同様で PZTA 圧電デバイスがどの条件に対しても大きいことがわか る。これらの事柄から PZT 圧電デバイスの電圧は負荷抵抗に依存することがわかる。その ため電源、電圧源とはならないことがわかります。 図 3.8 と表 10,11,12 より電圧最大値、電圧の絶対値積分、電圧の実効値共に PZTA 圧電デ バイスが最も良い。図 3.8 を用い、図 3.13 に示すように四つデバイスの電力評価を示した。 示した図により、表 13,14,15 に算出されたように電力最大値、エネルギー、単位面積エネ ルギー共に PZTA 圧電デバイスが最もよい結果となった。表 16 より PZTA、PZTB、PZTC、 PZTD 圧電デバイスすべてにおいて共振周波数を確認することが出来た。共振周波数は電圧 波形より振動周期より解析的に求めたものである。四つデバイスの無負荷の場合と負荷の 場合の共振周波数はほぼ変わらない。
35 図 3.8 4 つの PZT 圧電デバイスの負荷試験結果 表 10 最大電圧 種類 値 PZTA PZTB PZTC PZTD Vmax [V] 0.65 0.32 0.044 0.15 表 11 絶対値積分 種類 値 PZTA PZTB PZTC PZTD 0~1s 0.0036 0.0031 8.7 e-4 0.0022 0~2s 0.0040 0.0036 0.0012 0.0026 0~3s 0.0044 0.0040 0.0016 0.0030 表 12 実効値 種類 値 PZTA PZTB PZTC PZTD 0~1s 0.026 0.015 0.0028 0.0094 0~2s 0.019 0.011 0.0020 0.0067 0~3s 0.015 0.009 0.0017 0.0055
36
図 3.9 四つの PZT の電力評価
表 13 電力最大値( ) 種類
値 PZTA PZTB PZTC PZTD
Wmax [V] 4.24e-4 1.0e-4 2.4e-4 1.9e-4
表 14 出力エネルギー
(
)
種類
値 PZTA PZTB PZTC PZTD
0~1s 6.916 e-7 2.367 e-7 7.866 e-9 8.894 e-8
0~2s 6.918 e-7 2.370 e-7 8.086 e-9 8.916 e-8
0~3s 6.920 e-7 2.373 e-7 8.300 e-9 8.940 e-8 max max max
[
W
]
v
i
P
3 , ) ( ] J [ 0
v t idt t E t- 37 -
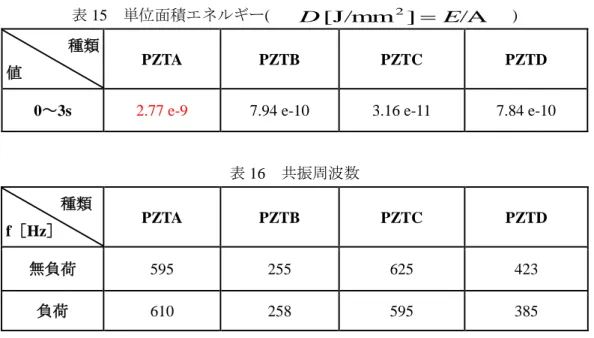
表 15 単位面積エネルギー( )
種類
値 PZTA PZTB PZTC PZTD
0~3s 2.77 e-9 7.94 e-10 3.16 e-11 7.84 e-10 表 16 共振周波数 種類 f[Hz] PZTA PZTB PZTC PZTD 無負荷 595 255 625 423 負荷 610 258 595 385 /A ] J/mm [ 2 E D
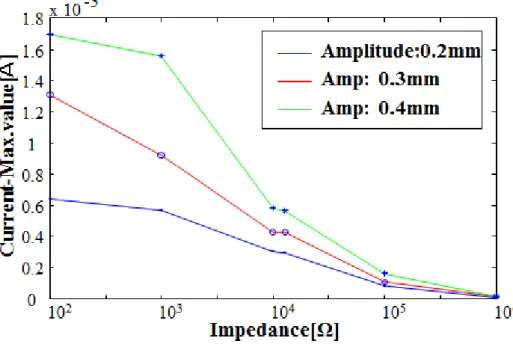
- 38 - 3.2.4 圧電デバイスの負荷整合 先ほどの負荷試験結果から電圧波形は負荷抵抗に依存することが確認できたため負荷抵 抗の値を変化させながら電力、エネルギーなどがどのように変化するのかという特性変化 を検証する。実験構成としては今までの構成と同様である。 まず、PZTA 圧電デバイスを対象として負荷特性を調べ、負荷整合実験を行っていく。圧 電デバイスに 0.2mm のステップ入力信号を入力して負荷が 100 Ω から 3M Ω までという実 験を行った。負荷電圧特性を図 3.10 のように示した。図から、抵抗を大きくするに従って 電圧が若干上昇することが分かる。しかし、抵抗を無限大に近づけると電圧が無負荷時の 電圧に接近していく。無負荷時の共振周波数とほぼ一致していることとともに、負荷が変 化しても共振周波数が変わらないが、減衰率が異なることが分かる。負荷パワー特性を図 3.11 に示した。図から分かるように12.8KΩ でパワーが最大となることを確認した。従って、 12.8 KΩ というパーワ負荷整合が見つけられた。 図 3.12 と図 3.13 と図 3.14 に示したのは入力ステップ振幅 0.2mm、0.3mm、0.4mm に対す る負荷電流特性、負荷パーワ特性、負荷エネルギー特性である。図 3.12 から、加えた振幅 を大きくすると電流値が上昇し、抵抗値を大きくすると電流値は単調減少であることが分 かる。図 3.13 より、パワー負荷整合値が 12.8KΩ であり、エネルギー負荷整合値と等しいは ずだが、図 3.14 から、エネルギー負荷整合値が 100 KΩ となっている。それに、入力ステッ プ振幅が 0.4mm より大きくすれば、簡単に 5 m W を上回ることができることが分かる。 そこで、電力最大となる負荷抵抗値とエネルギー最大となる負荷抵抗が異なる原因を解 析していく。実際圧電デバイスが共振している際に内部をコンデンサというモードと考え られているため、コンデンサのインピーダンスは共振周波数に依存する。図 3.15 から分か るように抵抗100KΩ の電圧出力のパワースペクトルに 39Hz と 586Hz という二つの共振点 が現れた。39Hz と 586Hz に対応するバンドパス(フィルタ)を適用した時間応答波形を図 3.16 に示している。BP フィルタの時間応答波形により、39Hz では振動時間が非常に長いが、 586Hz で振動時間が非常に短いことが分かった。下記(1)式より、ωが大きい方(586Hz)が Z が小さくなり、電力が大きくなることが分かる。(1)式より、ωが小さい方(39Hz)が Z が大きくなり、(2)式より、電力がそれほど大きくないのだが、減衰しにくいため、(3)式よ り電力波形の面積が大きくなる。従って、39Hz でエネルギーが最大となる。
- 39 - 図 3.10 PZTA 圧電デバイスの負荷-電圧特性(振幅 0.2mm)
V
o
lta
ge [V]
2.19
2.20
2.21
2.22
2.23
2.24
2.25
-2
0
2
4
6
8
10
12
Time [s]
図 3.11 PZTA 圧電デバイスの負荷-
パーワ
特性(振幅 0.2mm)2.19
0
2.19
4
2.19
8
2.20
2
2.20
6
2.21
0
-2
0
2
4
6
8
1
0
1
2
x 10
-4Time
[s]
Pow
er[
W]
100
1K
10K
12.8K
100K
1M
3M
- 40 -
図 3.12 PZTA 圧電デバイスの負荷-電流特性
- 41 - 図 3.14 PZTA 圧電デバイスの抵抗変化に対するエネルギー特性 インピーダンス:
Z =
1 jωC(1)
電力:
P(t) =
V(t) 2 Z(2)
エネルギー:W=∫ 𝑃(𝑡)𝑑𝑡
∞ 0(3)
図 3.15 電圧出力のパワースペクトル(抵抗負荷 100kW)- 42 -
図 3.16 BP フィルタを適用した時間応答波形 上記のパワー負荷整合値が抵抗を細かく刻み、12.8 KΩ でパワー最大となることが分かっ たが、エネルギー負荷整合値がおよそ100 KΩ であることは実験から得られ、詳しい値を出 せるように、これから実験結果による理論値の導出と実験検証を行う。 (1) 最大パワーPmaxの得られた負荷抵抗 実験値より ZP =12.8 KΩ 586 Hz (パワー最大) (2) PZTA 圧電デバイスの等価容量 CPZTの導出 PZT PZT
C
C
Hz
586
2
1
1
k
8
.
12
:V(t)のスペクトル密度より f=586Hz21
.
2
nF
k
8
.
12
Hz
586
2
1
PZTC
(3) エネルギー最大となる負荷抵抗 ZWの導出 fmax = 39 Hz V(t)のスペクトルより振幅最大となる周波数
193
k
nF
1
.
21
Hz
39
2
1
2
1
max
PZT WC
f
Z
(理論値) 上記に導いた等価容量とエネルギー最大となる抵抗値が正しいかどうか実験を行って 検証する必要があると考えられる。抵抗値を100 KΩ、200 KΩ、300 KΩ と細かく刻み、 実験を行って取った電力評価を図 3.17 に示している。図に基づいて、それぞれに対応す- 43 - る消費されたエネルギーが 1.7 10-6 [J]、3.4 10-6 [J]、3.3 10-6 [J]であると算出された。 数値から 200 kΩ でエネルギーが最大となることが分かる。上記の理論値 193 kΩ と一致す ることを確認したことで、導いた等価容量(21.2nF)とエネルギー最大となる抵抗値(193 kΩ)が正しいという結論が得られた。まとめとしては、図 3.18 に示しているように、12.8kΩ でパワーが最大となるとともに、200 kΩ でエネルギーが最大となることを確認した[13] 。
図 3.17 抵抗を細かく刻み電力評価(0.2mm) 図 3.18 インピーダンス抵抗に対する電力評価(0.3mm)
- 44 - 上記に PZTA 圧電デバイスに関する特性及びエネルギーが最大となる抵抗を確認した。 PZTA に関して、図に書かれている 3 本の線は上から 0.2,0.3,0.4mm のステップ加振を入力し た場合の値となっている。同じ解析方法で PZTB,PZTC,PZTD 圧電デバイスにおける 4 本の線は 0.5mm のステップ加振を加えた結果を示している。それぞれ図 3.19、図 3.20、図 3.21 のようになる。エネルギーピークが現れる区域をピンクの覆う部分に示している。ピ ンクの覆う区域の抵抗値を細かく刻み、調べた四つ圧電デバイスのエネルギー負荷整合値 は表 21 に示している。表より、圧電デバイスの材料と形状が異なるに従って、エネルギー の負荷整合値が異なることが分かる。 図 3.19 PZTB 圧電デバイスの抵抗変化に対するエネルギー特性 図 3.20 PZTC 圧電デバイスの抵抗変化に対するエネルギー特性
- 45 - 図 3.21 PZTD 圧電デバイスの抵抗変化に対するエネルギー特性 表 17 エネルギー負荷整合値 種類 導出量 PZTA PZTB PZTC PZTD 負荷整合値 200kΩ 2.6kΩ 5.0kΩ 165kΩ
- 46 -
第 4 章 圧電デバイスのエネルギーハーベステ
ィング効率実験
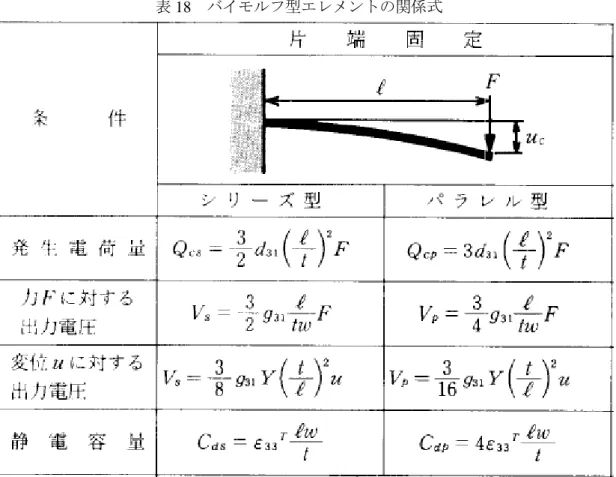
4.1 効率測定理論式の導出 実験構成を図 4.1 に示す。PZT 圧電デバイスに任意の負荷抵抗をつなぎ、クランプする。 PZT 圧電デバイスの先端に上から変位計レーザー(Laser)をあて、重りを糸で吊るす。本実験 では重りとして分銅を用いている。第 3 章の実験とは異なり、ラップ棒ではなく、重りを 用いて初期変位を与え、初期変位から分銅によって PZT 圧電デバイスに加えられている入 力エネルギーを計算している。分銅を糸で吊りさげた状態から糸を切ることによって、PZT 圧電デバイスに荷重を掛けた状態から開放することで PZT 圧電デバイスを振動させ、電圧 出力を発生させている。電圧出力から上述と同様に出力エネルギーを計算し、出力エネル ギーと入力エネルギーのエネルギー比より効率[%]を計算している。図 4.1 に示す実験構成 略図に基づき、入出エネルギー及び回生効率における理論式の導出は下記のように導かれ た[14]。表 18 よりパラレル型の変位量に対する電圧式が下記の(3)式のようになる。 図 4.1 実験構成略図 入力エネルギーは𝑊
𝑖=
1 2𝑘𝑥
2=
1 2𝑘(
𝑚𝑔 𝑘)
2=
𝑔2 2𝑘𝑚
2= 𝑄𝑚
2 (Q が定数) (1) となる。 出力エネルギーは- 47 -
𝑥
0= −𝑥𝑒
−ℎ𝜔𝑡cos(𝜔𝑡) = −
𝑚𝑔𝑘𝑒
−ℎ𝜔𝑡cos (𝜔𝑡)
(振幅減衰) (2) となる。𝑣(𝑡) =
3𝑔31𝑌𝑎2 16𝑙2𝑥
0(3) であるため[15] 、 (2)式を(3)式に代入し、整理すると次のように示す。
𝑊
𝑜= ∫
0𝑡𝑣(𝑡)𝑅2𝑑𝑡
= ∫
(−3𝑔31𝑌𝑎216𝑙2 × 𝑚𝑔 𝑘 𝑒−ℎ𝜔𝑡𝑐𝑜𝑠(𝜔𝑡))2 𝑅 𝑡 0dt
(4)= (−
3𝑚𝑔𝑔31𝑌𝑎2 16𝑘𝑙2)
2 1𝑅∫ (𝑒
−ℎ𝜔𝑡𝑐𝑜𝑠(𝜔𝑡))
2 𝑡 0𝑑𝑡
(5)(−
3𝑚𝑔𝑔31𝑌𝑎2 16𝑘𝑙2)
2 1𝑅を A とすると、𝑊
𝑜= A∫ (𝑒
𝑡 −ℎ𝜔𝑡𝑐𝑜𝑠(𝜔𝑡))
2𝑑𝑡
0(6) と表示される。 部分積分方法で整理すると、
𝑢 = (𝑐𝑜𝑠(𝜔𝑡))
2𝑣
′= 𝑒
−ℎ𝜔𝑡𝑑𝑡
𝑢
′= −2cos (𝜔𝑡)sin (𝜔𝑡)𝜔𝑑𝑡 𝑣 = −
ℎ𝜔1𝑒
−ℎ𝜔𝑡 となり、下の式に代入し、∫ (𝑒
𝑡 −ℎ𝜔𝑡𝑐𝑜𝑠(𝜔𝑡))
2𝑑𝑡
0= [−
(𝑐𝑜𝑠(𝜔𝑡)) 2 ℎ𝜔𝑒
−ℎ𝜔𝑡]
0 𝑡− ∫
0𝑡ℎ1𝑒
−ℎ𝜔𝑡𝑠𝑖𝑛 (2𝜔𝑡)𝑑𝑡
と表示できる。 部分積分方法で整理すると、次のように示す。𝑢 = sin (2𝜔𝑡) 𝑣
′= 𝑒
−ℎ𝜔𝑡𝑑𝑡
𝑢
′= cos (2𝜔𝑡)2𝜔𝑑𝑡 𝑣 = −
ℎ𝜔1𝑒
−ℎ𝜔𝑡= −
(cos(𝜔𝑡))ℎ𝜔 2𝑒
−ℎ𝜔𝑡+
1 ℎ𝜔−
1 ℎ[[−
1 ℎ𝜔𝑒
−ℎ𝜔𝑡sin (2𝜔𝑡)]
0 𝑡− ∫ −
𝑡 1ℎ𝑒
−ℎ𝜔𝑡2
0cos (2𝜔𝑡)d𝑡]
=
1 − (cos(𝜔𝑡))
2𝑒
−ℎ𝜔𝑡ℎ𝜔
+
1
ℎ
2𝜔
𝑒
−ℎ𝜔𝑡sin(2𝜔𝑡) −
1
ℎ
2∫ 𝑒
−ℎ𝜔𝑡 𝑡 02(2cos (𝜔𝑡)
2− 1)𝑑𝑡
=
ℎ−𝑒−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))ℎ2𝜔 2−sin(2𝜔𝑡))−
ℎ12∫ 𝑒
0𝑡 −ℎ𝜔𝑡4 cos(𝜔𝑡)
2𝑑𝑡 +
1ℎ2
∫ 2𝑒
−ℎ𝜔𝑡 𝑡- 48 -
=
ℎ−𝑒−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))ℎ2𝜔 2−sin(2𝜔𝑡))−
ℎ42∫ 𝑒
0𝑡 −ℎ𝜔𝑡cos(𝜔𝑡)
2𝑑𝑡 +
2 ℎ2[−
1 ℎ𝜔𝑒
−ℎ𝜔𝑡]
0 𝑡ℎ
2+ 4
ℎ
2∫ 𝑒
−ℎ𝜔𝑡 𝑡 0cos(𝜔𝑡)
2𝑑𝑡 =
ℎ
2− ℎ𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡)) − 2𝑒
−ℎ𝜔𝑡+ 2
ℎ
3𝜔
ℎ
2+ 4
ℎ
2∫ 𝑒
−ℎ𝜔𝑡 𝑡 0cos(𝜔𝑡)
2𝑑𝑡 =
ℎ
2− ℎ𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡)) − 2𝑒
−ℎ𝜔𝑡+ 2
ℎ
3𝜔
∫ 𝑒
𝑡 −ℎ𝜔𝑡 0cos(𝜔𝑡)
2𝑑𝑡 =
ℎ
2− ℎ𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡)) − 2𝑒
−ℎ𝜔𝑡+ 2
ℎ𝜔
×
1
ℎ
2+ 4
=
ℎ
2− ℎ𝑒
−ℎ𝜔𝑡(ℎ(cos(𝜔𝑡))
2− sin(2𝜔𝑡)) − 2𝑒
−ℎ𝜔𝑡+ 2
ℎ𝜔(ℎ
2+ 4)
=
𝑒
−ℎ𝜔𝑡(ℎ sin(2𝜔𝑡) − ℎ
2(cos(𝜔𝑡))
2− 2) + ℎ
2+ 2
ℎ𝜔(ℎ
2+ 4)
上記の式と A を(6 式に代入すると、
𝑊
𝑜=
𝑅1(−
3𝑚𝑔𝑔31𝑌𝑎2 16𝑘𝑙2)
2 𝑒 −ℎ𝜔𝑡(ℎ sin(2𝜔𝑡)−ℎ2(cos(𝜔𝑡))2−2)+ℎ2+2 ℎ𝜔(ℎ2+4)(7)
=
1𝑅(−
3𝑔𝑔31𝑌𝑎2 16𝑘𝑙2)
2 𝑒 −ℎ𝜔𝑡(ℎ sin(2𝜔𝑡)−ℎ2(cos(𝜔𝑡))2−2)+ℎ2+2 ℎ𝜔(ℎ2+4)𝑚
2= 𝐾𝑚
2(K が定数) と導かれる。エネルギー回生効率は
μ =
𝑊𝑜 𝑊𝑖=
𝐾𝑚2 𝑄𝑚2= 𝑆
(S が定数) (8) となる。 ここで、𝑊𝑖:入力エネルギー、𝑊𝑜:出力エネルギー、k:板バネ係数、𝑥𝑜:変位量、h:減衰係 数、ω:周波数、Y:アドミッタンス、m:質量、𝑔31:電圧出力係数- 49 -
- 50 - 4.2 効率測定実験概要 Laser は、前節の実験と同様の SUNX 製のものを用いているが、分解能が荒いため、途中 からキーエンス(Keyence)製の Laser を使用している。データの解析に関しては第 2 章と同様 のオシロスコープ、dSPACE の他に Keyence 製のデータロガーも適宜用いた。 実験で評価した導出量は以下に示すとおりである。(9)式入力エネルギーはPZTプレート をばね近似して計算することによってW=12kx2となる。フックの法則F = kxを用いること によってW=12Fx=12mgxと求めることが出来る。(10)式電力の最大値については電力波形 の最大値を 2 乗し、負荷抵抗値 R で割った値を用いる。 P=VI と I = V/R より P = V 2/Rとして求めることが出来る。(11)式出力エネルギーに関 しては前述で述べたとおりである。(12)式効率に関しても上記の実験構成で説明したように 入力エネルギーと出力エネルギーの比を用いて導出している。以上が評価した導出量とな る[16]。 図 4.2 実験構成写真
- 51 - (9) (10) (11) (12)
R
v
P
max[
W
]
max2/
0 02
1
2
1
]
J
[
Fdx
Fx
mgx
W
i
v dt R Wo [J] 1 2 100 ] % [ i o W W
- 52 - 4.3 圧電デバイス無負荷効率実験 無負荷試験の結果を以下に示す。図 4.3 の上の波形は横軸が時間、縦軸が変位量を表し、 時間に対する変位を示した波形、全てに対して分銅の重さは 50g を使用している。下の波 形が時間に対する電圧出力を示した波形になっている。同じく横軸が時間を表しており、 縦軸が電圧出力を示している。図 4.3 の下の波形も上の波形と同様に全ての各種 PZT 圧電 デバイスに対して 50g の分銅を用いて荷重をかけている。 それぞれの実験の結果を考察すると、変位波形に関して 0 秒からデータの記録を始め、2 秒後半までは PZT 圧電デバイスの先端に重りを糸で垂らしている。そこから、3 秒程度で 糸を切ることによって第一の定常状態から過渡状態へと移行していることがわかる。過渡 状態ではメカニカルな微小振動をしながら第 2 の定常状態へ移行している。図から、オー バーシュート無く定常状態へと移行している。 電圧波形に関しては 5 秒程度まで定常状態が続き、その後 PZT 圧電デバイスに重りを吊 り下げた糸を切ることによって PZT 圧電デバイスが荷重から開放され、振動することによ って電圧が発生する。電圧は発生した後に定常値に収束していく。電圧の大きさは荷重に よる変位量に依存し、PZT 圧電デバイスの剛性に影響されている結果となっている。PZTB 圧電デバイスの電圧波形は第 2 章と同様で、減衰が小さく、電圧が長く出力されているこ とが確認できる。 図 4.3 と表 19 より、同じおもりの重さ 50g を用いているにもかかわらず PZTA 圧電デバ イスは 0.1mm 程度しか変化せず、対して PZTD 圧電デバイスに関しては同じ重りにもかか わらず 1mm 程度の変位をしている。これは PZTA 圧電デバイスが剛性な材料でできており、 対して PZTD 圧電デバイスは柔性な材料によって作られているのではないかと予想される。 同じ力を加えているにもかかわらずこれだけの変位の差が出ていることにより、先ほどの 実験では変位量を一定となるようにとっていたが、加えられていた力はそれぞれの素子に よって異なり PZTA 圧電デバイスに加えられていた力は大きく PZTD 圧電デバイスに加えら れていた力は小さかったのではないかと推測できる。 補足であるが、入力エネルギーとして J(ジュール)を用いたのは、今回実験のテーマとし て振動発電用デバイスで用いる PZT 圧電デバイス各種の基礎特性についての実験であるた めに J を用いている。実際に振動発電用デバイスが制作できた場合は、発電量などの議論が 必要であるために W(ワット)を用いて表現することになると考えている。
- 53 - 図 4.3 無負荷試験の変位波形(上)と電圧波形(下) 表 19 無負荷試験結果 導出量 種類 変位[mm] 電圧最大値[V] 入力エネルギー [J] PZTA 0.14 6.83 3.3 e-005 PZTB 0.6 9.8 1.46 e -004 PZTC 0.47 22.0 1.15 e-004 PZTD 0.98 32.4 2.4 e-004
- 54 - 4.4 圧電デバイス負荷効率実験 本実験は先ほど説明した無負荷試験とほぼ同様の実験方法である。4 種の PZT 全てを対 象とし実験を行った。荷重の重さは同様に 50g を使用している。異なる点は、抵抗を負荷 としている点である。負荷抵抗としては各種 PZT によらず 10kΩ で一定にしている。実際 に得られた波形と表を図 4.4 に示す。 負荷変位波形を図 4.4(上)に示した。荷重をかけた定常状態から PZT 先端に吊るしてい る重りの糸を切ることによって過渡状態に移行している。過渡状態からオーバーシュート なく定常状態に移行していくことが図よりわかる。PZTD に関しては変位量が大きくなって いるために少し振動成分が出てきていることが確認できる。PZTC の初期の定常状態での振 動は PZT を先端に固定した際に発生した糸のねじれによって重りが振動してしまったため ではないかと考えている。無負荷試験の場合と比較してほぼどの PZT も変位量に関しては 負荷、無負荷で違いはないことが確認できる。 負荷試験による電圧波形を下の図 4.4(下)に示した。定常状態である電圧出力 0 の定常 値から PZT 先端の重りをつけている糸を切ることによって過渡状態に移行していることが わかる。電圧出力が発生し、振動的に減衰しながらもう一度定常状態に変化していること が確認できる。第 3 章で述べたとおり、無負荷試験と負荷試験では負荷抵抗を接続するこ とによって出力電圧が小さくなる傾向にあることがわかっているが、今回の重りを用いた エネルギー効率試験に関しても同様の結果が得られた。 表 20 で用いた導出量に関しては前述のとおりであるため割愛する。ただし、表に示した E の文字はエネルギーの略記であり、表の横幅の関係により略記した。最大電力値は電圧の 2 乗によって求められるために、電力波形の最大値をとっている PZTB が最も大きな結果と なっている。表に示した入力エネルギーの大小関係に関しては変位量の大きさによって決 まっていることが図と表からわかる。出力エネルギーの関係も、図 4.4(下)より電圧出力 波形が大きな順に大きい値をとっていることが確認できる。定抵抗を負荷した場合の効率 の結果としては PZTB が最高の値をとっていることがわかる。このことは出力エネルギーに おいて最高の値をとり、入力エネルギーに関して 4 種の中で比較して中間の値をとってい ることからも妥当性がありそうな結果となっている。
- 55 - 図 4.4 負荷試験の変位波形(上)と電圧波形(下) 表 20 負荷試験結果 導出量 種類 変位[mm] 最大電力[W] 入力 E [J] 出力 E[J] 効率[%]
PZTA 0.2 9.4 e-004 4.9 e-005 1.5 e-006 3.0
PZTB 0.7 1.4 e-003 1.8 e-004 9.1 e-006 4.8
PZTC 0.5 9.0 e-003 1.2 e-004 3.7 e-006 3.1