見通し内通信を支援する相対位置情報を利用した名 前解決ミドルウェアの提案と実装評価
野田, 厚志
https://doi.org/10.15017/1441263
出版情報:Kyushu University, 2013, 博士(工学), 課程博士 バージョン:
権利関係:Fulltext available.
利用した名前解決ミドルウェアの提案と実装評価
平成 26 年 1 月
野田 厚志
目 次
第1章 はじめに 4
1.1 背景 . . . . 4
1.2 目的 . . . . 7
1.3 構成 . . . . 11
第2章 関連研究 12 2.1 通信識別子交換技術 . . . . 12
2.2 位置測定方式 . . . . 14
2.3 位置情報による端末同定手法 . . . . 18
2.4 認証方式 . . . . 24
第3章 見通し内における一時的な通信 28 3.1 概要 . . . . 28
3.2 通信相手の特定 . . . . 29
第4章 相対位置情報を利用した名前解決ミドルウェア 32 4.1 概要 . . . . 32
4.2 アプリケーションインタフェース . . . . 34
4.3 システム構成 . . . . 36
4.4 WiPSの概要とLSACにおける問題点 . . . . 39
4.4.1 WiPSの概要 . . . . 39
4.4.2 位置推定アルゴリズム . . . . 43
4.4.3 LSAC環境における課題 . . . . 46
4.5 相対位置情報の修正 . . . . 47
4.6 負荷分散手法 . . . . 50
4.6.1 位置推定端末の交代 . . . . 50
4.6.2 位置推定計算の負荷軽減 . . . . 53
第5章 LSACネットワークにおける端末相互認証手法 56 5.1 提案手法の概要 . . . . 56
5.2 表形式確認方式 . . . . 57
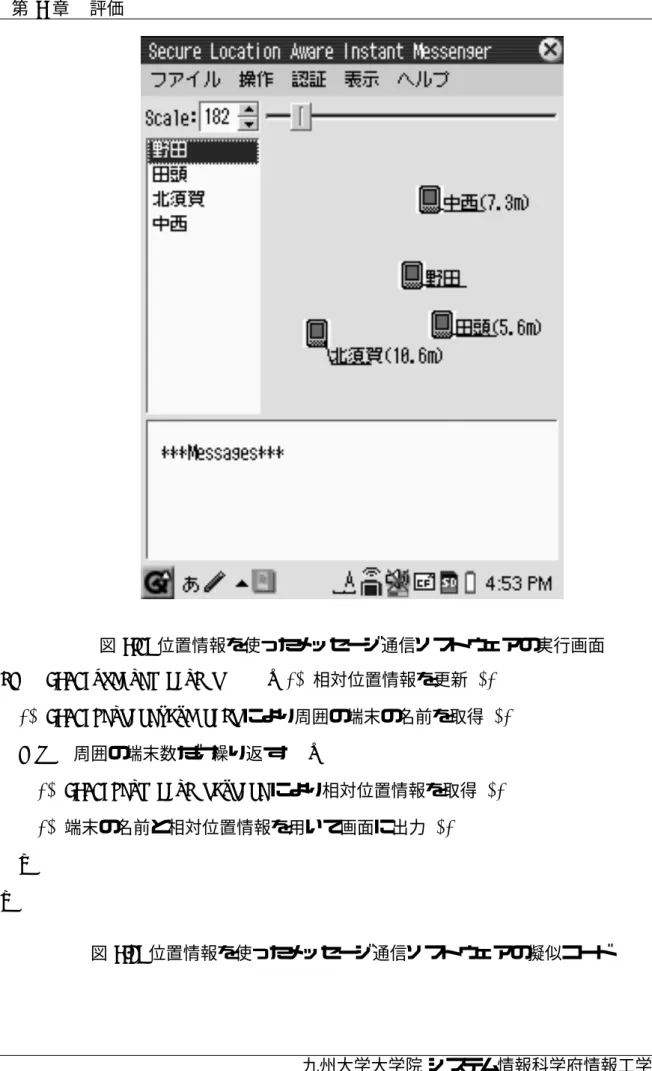
第6章 評価 60 6.1 位置情報を使ったメッセージ通信ソフトウェア. . . . 60
6.2 性能評価 . . . . 62
6.2.1 必要な計算資源 . . . . 62
6.2.2 相対位置計算に必要な時間 . . . . 63
6.2.3 端末間距離のノイズ軽減 . . . . 66
6.3 位置推定における負荷分散手法の評価 . . . . 68
6.3.1 シミュレーション環境 . . . . 68
6.3.2 計算量 . . . . 69
6.3.3 精度 . . . . 70
6.4 LSACネットワークにおける端末相互認証手法の評価 . . . . 72
6.4.1 提案手法の実装 . . . . 73
6.4.2 実験環境 . . . . 74
6.4.3 実験結果 . . . . 75
6.4.4 表形式に関する考察 . . . . 79
6.4.5 定性的評価 . . . . 80
第7章 おわりに 83 7.1 成果 . . . . 83 7.2 今後の課題 . . . . 84
謝辞 85
参考文献 86
本論文に関する著者の発表論文 92
図 目 次
1.1 近隣端末との通信環境例 . . . . 8
1.2 名前のリストを使った通信対象の選択イメージ. . . . 9
1.3 位置情報を使った通信対象の選択イメージ . . . . 10
2.1 距離による位置推定 . . . . 14
2.2 角度による位置推定 . . . . 15
2.3 距離と角度を組み合わせた位置推定 . . . . 15
2.4 GPS衛星による3辺測量 . . . . 19
2.5 電波強度データベースによる測位 . . . . 20
2.6 電波の伝播モデルを利用した3辺測量による測位 . . . . 21
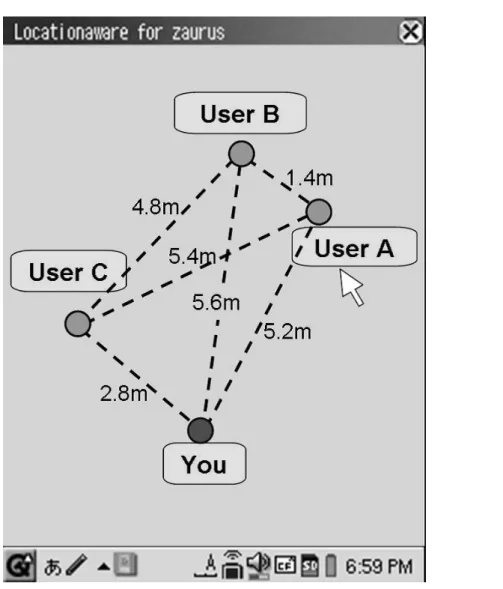
3.1 相対位置を用いた端末特定の画面例 . . . . 30
3.2 位置情報を使ったLSAC . . . . 31
4.1 本ミドルウェアが実現する仕組み . . . . 34
4.2 端末の通信識別子,名前,相対位置の変換 . . . . 35
4.3 ミドルウェアを構成するサブシステム . . . . 37
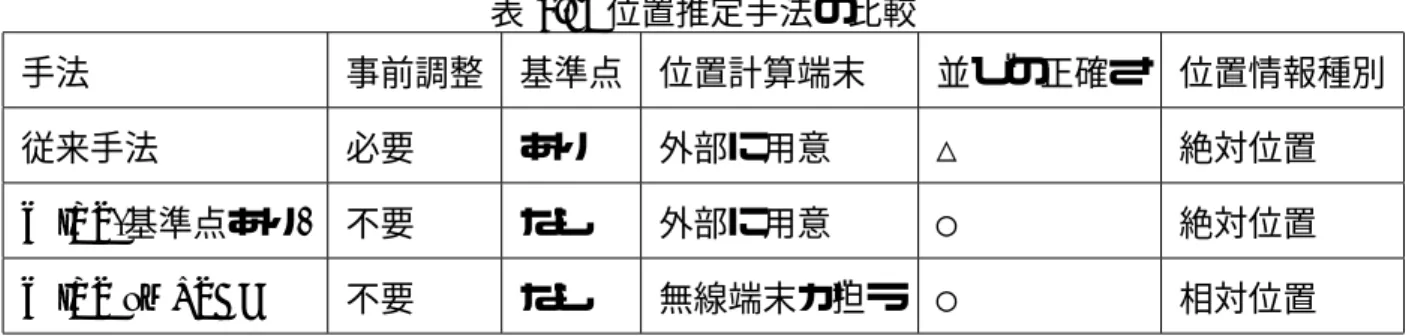
4.4 位置推定手法の比較 . . . . 40
4.5 サーバ・クライアント方式 . . . . 42
4.6 WiPSの構成 . . . . 42
4.7 ばねモデルと位置修正係数α . . . . 44
4.8 相対位置,絶対位置とユーザの向き . . . . 48
4.9 位置推定端末の動的割当 . . . . 51
4.10 ノードの移動による距離の変化 . . . . 54
5.1 表形式確認方式によるサマリ確認の流れ . . . . 58
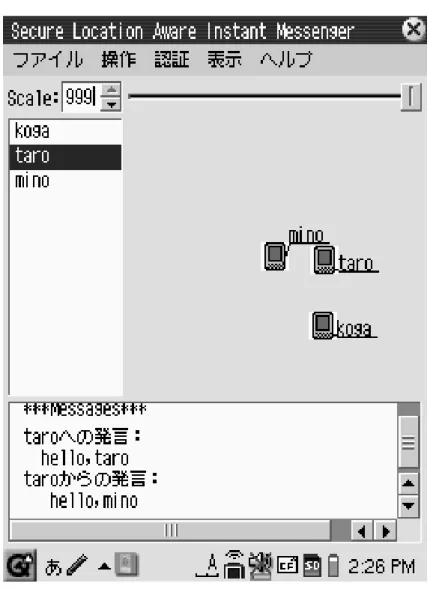
6.1 位置情報を使ったメッセージ通信ソフトウェアの実行画面 . . . . 61
6.2 位置情報を使ったメッセージ通信ソフトウェアの擬似コード . . . . 61
6.3 位置計算処理時間 . . . . 64
6.4 2回目以降の計算時間の初回に対する割合 . . . . 65
6.5 測定距離における外乱の影響の軽減 . . . . 67
6.6 移動ノードの割合に対する計算量の変化 . . . . 69
6.7 繰返し計算による位置推定精度の向上 . . . . 70
6.8 移動端末の割合に対する位置推定精度の変化 . . . . 71
6.9 メッセンジャーアプリケーションLAIMのスクリーンショット . . . . 72
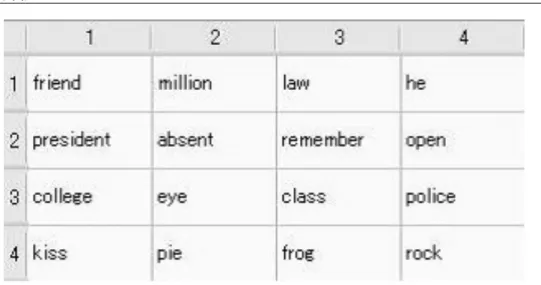
6.10 単語によるサマリ確認表のイメージ . . . . 74
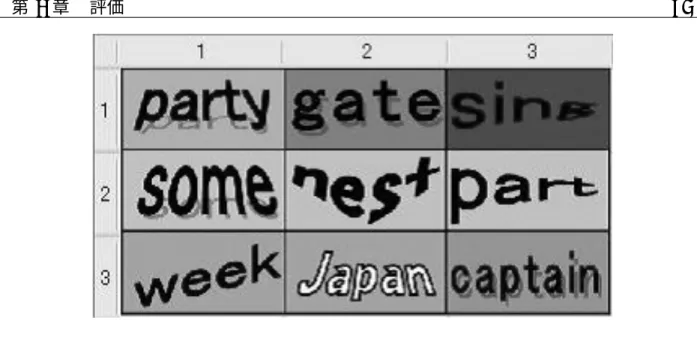
6.11 フォントや色を使ったサマリ確認表のイメージ. . . . 75
6.12 口頭による確認に要した時間 . . . . 76
6.13 目視による確認に要した時間 . . . . 77
6.14 フォントと色の比較 . . . . 78
表 目 次
2.1 バイオメトリックワードリストの一部 . . . . 27
4.1 位置推定手法の比較 . . . . 41
6.1 位置計算サーバに必要な計算資源 . . . . 63
6.2 位置計算サーバの通信量 . . . . 63
6.3 携帯端末での位置計算処理時間 [ms]. . . . 65
本論文では,ユーザの見通し内における一時的な通信をLSAC(Line of Sight Ad-hoc Communication)と呼び,LSACにおいて相対位置情報を利用して通 信相手の特定を支援する名前解決ミドルウェアを提案するとともに,その実装,
評価を行なう.
近年,あらゆる機器や装置が通信デバイスを装備し,それらがネットワークで 有機的に結合されるユビキタス計算環境が現実のものになりつつある.特に,無 線通信デバイスによる接続は,その利便性の高さから,ユビキタス計算環境の核 となるデバイスとして,様々な分野からの研究開発が進められている.対面して いる利用者の端末間での通信においても,近距離無線通信は今後,より盛んに利 用されるようになると考える.たとえば,営業担当者が企業を訪問した際に電子 的な資料を無線通信で手渡したり,喫茶店で友人同士がデジカメの画像をやり取 りしたりする状況である.このような状況において,現時点ではUSBメモリな どの物理媒体や,電子メールなどのバックボーンとなるインターネット通信を利 用したファイル交換が盛んであるが,端末間での無線通信機能を利用した直接の ファイル交換が行われることは比較的少ない.この要因として近距離無線通信に おける通信相手の指定,特定の煩わしさが挙げられる.通信相手を指定するため には,ネットワーク上における通信相手の識別子(IPやMACアドレス)を知り,
それを端末に直接入力するか,もしくはブロードキャスト通信等を利用して近く にある端末の識別子一覧を取得し,その中から指定するという煩雑な手順が必要 である.本研究では端末の配置情報(すなわち端末との相対的な位置情報)を用 いてこれを解決する.端末の画面上に周辺端末の位置関係を表示することで,利 用者は位置情報から通信対象を容易に特定することができる.本研究では,ユー ザの視界内に存在する端末間で,一時的にネットワークを形成し,即座に情報交
換を実現するLSAC(Line of Sight Ad-hoc Communication)を構築し,LSACを 支援する技術について提案,評価を行なう.無線通信機能をより直感的かつ信頼 して利用できるようにすることで,利用者同士が対面している状況を活用した近 距離無線通信が今後より活用されていくことが推測される.
本研究の目的は,LSAC環境における通信相手の特定を支援することである.
この目的を達成するために,本研究では名前解決ミドルウェアを提案する.この ミドルウェアは,従来の名前を用いることに加えて,周辺端末との相対位置を補助 的に提示し,LSAC環境における通信相手の特定を効果的に支援するものである.
提案ミドルウェアは,次の特徴を有する.(1) 提案ミドルウェアの機能を,アプ リケーションが柔軟に利用できるように,シンプルなAPI(Application Program Interface)を提供する.(2)LSAC環境では専用サーバをあらかじめ配置することが できない.従って,提案ミドルウェアはこのような専用サーバが存在しない環境で も動作が可能である.また,PDA程度の処理能力でも動作が可能である.(3)キャ リブレーションを必要とせずに,周囲の端末の相対位置を取得可能であるWiPS
(Wireless LAN indoor Positioning System)をベースにした測位手法を採用して いる.提案ミドルウェアのプロトタイプシステムを構築し,応用プログラムの作 成と基礎的な評価を行った.評価の結果から,PDA程度の処理能力で十分に提案 ミドルウェアを稼働できることを確認した.さらに位置推定において移動した端 末の位置のみを計算しなおすことで,負荷の軽減を実現した.その結果,移動端 末の割合が50%前後の場合に最大となる50%程度の精度低下が見られた.また,
移動端末の割合に比例した計算負荷を軽減できることを提示した.これらのこと から,提案した負荷軽減手法では位置推定精度をある程度犠牲にはするが,計算 負荷の軽減を可能とすることを示した.また,LSAC環境における安全な通信の ための暗号化について,公開鍵の認証の必要性について述べた.しかしながら,
本研究で対象としている環境においては,認証局が存在するネットワークに接続 していない場合も想定するため,公開鍵基盤を利用した公開鍵認証を利用できる
とは限らない.この問題点を解決するために,利用者同士が近距離で対面してい ることを利用し,相互に公開鍵の認証を行なうことのできる手法として,「表形式 確認方式」を提案した.この方式は,認証局を用いずに相互に端末を認証し,互 いに認証した端末間で暗号化を行ったファイル共有を実現し,主に中間者攻撃と 誤った端末への送信を防ぐ効果を持つ.端末の相互認証には公開鍵暗号を用いる が,互いに対面する利用者間の信頼関係をよりどころとして,利用者が互いの端 末の公開鍵を確認しあうことで,相互認証を実現する.認証手順の中に人間の確 認作業を含める man-in-the-loop アプローチによって,利用者自身が認証の有無 を明らかに認識することができる.評価実験の結果,提案方式は従来方式よりも 確認に要する時間が短いことがわかった.位置情報を利用する既存のアプリケー ションに機能を追加する形で,提案方式の実装を行った結果,英単語表を用いて サマリの一致性を確認することにより,公開鍵の認証を行い,暗号化通信を開始 ができることが確認できた.これらの評価により,提案ミドルウェアの実現可能 性と有用性を示した.
第
1章 はじめに
本章では,本研究の背景と目的,および本論文の章構成について述べる.
1.1 背景
近年,通信機器,とりわけ携帯端末やモバイル通信環境の発展により,あらゆる機器や装置 が通信デバイスを装備し,それらがネットワークで有機的に結合されるユビキタスコンピュー ティング環境が現実のものになりつつある.それに伴い,ユーザは日常の多くのわずらわし さから解放されてきた.例えば,携帯電話の普及する以前,1980年代ごろには人々は待ち合 わせをするのに正確な日時と正確な場所をあらかじめ打ち合わせておく必要があった.携帯 電話の普及した現代ではおおまかな場所を決めておいて,あとは待ち合わせの時間にどこに いるか連絡を取りあうだけでよい.また,知らない場所へ行く際にも,以前は地図を読み解 き自身で進むべき方向を決めるか,道を知っている人を見つけて道順を聞くというわずらわ しさがあった.現在ではモバイル端末でのナビゲーションシステムも普及しており,ユーザ の現在位置は端末が自動的に取得を行ない,ユーザは目的地を指定するだけで端末が道順を 教えてくれる.ユビキタスコンピューティング社会のさらなる発展に向けて,無線通信デバ イスが,その利便性の高さから中核をなすデバイスとして,様々な分野からの研究開発が進 められている.
ユビキタスは「偏在する」と訳され,米ゼロックスパロアルト研究所の故Mark Weiserが,
1991年に提唱したコンセプトである[1].Weiser のコンセプトはユーザから認識されないほ どにコンピュータが環境に溶け込んでしまうことあったが,多くの場合「いつでも・どこで も」コンピュータを利用できる環境を指してユビキタスという言葉が使われることが多い[2]
「いつでも・どこでも」コンピュータの利用が可能な環境では,コンピュータの利用形態 がこれまでとは大きく変化する.すなわち,これまではコンピュータが設置されている場所 は主にオフィスや家庭の机上であり,そこで利用することだけを想定してサービスやアプリ ケーションを作成すればよかったのに対して,コンピュータを利用している場所や環境の多様 性が増加し,サーピスやアプリケーションで配慮すべき事項が増加する.つまりより良い使 いやすいアプリケーションを作成するためには,利用者の状況に応じてサービス内容やサー ビス提供方法を適応的に変化させる仕組みを導入していかねばならない.利用者の状況はコ ンテキストあるいはプレゼンスと呼ばれ,具体的な例として,利用者が所持している端末の 機能や,周囲の利用できる機器,ネットワーク回線の大域幅といった機器に関する状況をは じめ,利用者の前後のスケジュールや,体調,心理状態,周囲のうるささなどといった様々 な要素が考えられる.それらの状況をアプリケーションが適切に読み取ることで,その状況 に適したサービスをユーザに提供することが可能となる.また,携帯電話がそうであったよ うに,当初は利用者のほとんどがビジネスマンであるという状況から,時代の変化に伴って 小学生からお年寄りまでがサービスの対象となるユーザとなることが想定され,その意味で も利用者へのサービスの適応が必要となる.
コンテキストの中でも特に重要であると考えているのが位置情報である.例えばある人が 会議室にいるとわかれば,その人は現在会議中であることが推測できる.また,旅行でなれ ない土地を移動する場合では,ユーザの現在位置を把握することで,その位置情報に応じた 周辺施設の情報や,目的地までの経路をユーザに示すなどすることができる.このように,
ユーザの位置情報が重要であるばかりでなく,ユーザから見た周辺施設,周辺機器の位置情 報も重要であると考える.
様々なサービスに応じて,利用される位置情報の精度,表現形式も様々である.例えば,
GPS(Global Positioning System)が提供する緯度,経度,高度で示される地理座標や,東 京都,板橋区といった行政が定めた住所区分,さらには204号室などといった建物内の構造 に関する区分,また,ユーザの目の前20cmといった相対的な位置も考えられる.
位置を測定し,ユーザやさまざまなサービスから利用可能とする技術が数多く研究・開発 されているが,広く普及している技術はGPS(Global Positioning System)などごく限られ たものしかない.GPSは地図等のGIS(地理情報システム)と組み合わせることで,航空,
船舶,陸運をはじめ,消費者向けではカーナビゲーション,携帯電話での個人のナビゲーショ ンなど多彩に利用されている.GPSも実際には単独で用いられることは比較的少なく,多く の場合はジャイロや加速度計,コンパス,道路情報などと組み合わせて用いることで,安定 した動作や制度の維持を行なっている.
GPSは人工衛星を用いた位置測定技術であるため,屋内では利用することが出来ない.屋 内での利用を想定した測位システムが数多く研究されている.多くは専用設備を必要するな ど設置・運用コストが高い傾向にあり,位置測定システムそのものの普及を目指していると いうよりは,位置情報を利用した新たなアプリケーションを研究・開発するためのプラット フォームとして構築されているものが多い.そのため,本研究が対象とする環境よりも限ら れた場所でしか利用可能でない測位システムであると考える.
近距離無線通信機能は今後,対面している利用者の端末間での通信に盛んに利用されるよ うになると考える.たとえば,営業担当者が企業を訪問した際に電子的な資料を無線通信で 手渡したり,喫茶店で友人同士がデジカメの画像をやり取りしたりする状況である.このよ うな状況において,現時点ではUSBメモリなどの物理媒体や,電子メールなどのバックボー ンとなるインターネット通信を利用したファイル交換が盛んであるが,無線通信機能を利用 したファイル交換が行われることは比較的少ない.無線通信機能をより直感的かつ信頼して 利用できるようにすることで,その一部は利用者同士が対面している状況を活用した近距離 無線通信に置き換わっていくことが推測される.
無線通信に対する信頼の低さのひとつとして,盗聴などの攻撃に対する安全性への不安が あげられる.事実,安易に構成された無線ネットワークは盗聴が比較的容易であり,共有す
るファイルなどが不用意に漏洩する危険性を伴う.また誤った相手への送信などの事故によ る漏洩も心配の一因である.現在でも一定の知識と労力を伴えば安全なネットワークを構築 することができるが,情報工学や計算機科学の専門家であってさえ,労力を払うより,より 確実で慣れ親しんだ物理媒体やインターネット通信を好む傾向にあり,非専門家はその多く が利用しない状況にある.
本論文で想定するLSAC(Line of Sight Ad-hoc Communication)とは,利用者の携 帯端末と目前の第三者の端末とで構成される無線ネットワーク上での通信である.第三者の 端末としては,目の前にいる人物の端末や,インターネットキオスクなどに設置されたプリ ンタなどの公共機器を想定している.PANとは異なり,ネットワーク内の端末の一部は,利 用者自身の所有ではなく,利用者の周囲の見える範囲にある端末である.複数人で構成する 点を除いてPANに近い近距離端末間の通信を想定している.この無線ネットワークは,無 線LANでいえばアドホックモードでのpeer-to-peer通信で構成されるネットワークであり,
アクセスポイント等のインフラやインターネット接続性は必ずしも必要とせず,その代わり 通信相手の端末(もしくは端末利用者)が見える範囲にいることを前提とするネットワーク である.無線ネットワークの構成に依存するものではないが,盛んに研究されているマルチ ホップの無線アドホックネットワークよりむしろ,シングルホップの無線ネットワークを想 定している.
1.2 目的
本研究では,無線通信デバイスのなかでもBluetoothや無線LAN のアドホックモードな どのインフラを必要としない近距離無線デバイスに着目している.また,このような近距離 無線通信デバイスを用いて,ユーザの視界内に存在する端末と,一時的にネットワークを形 成し,即座に情報交換を実現するLSAC(Line of Sight Ad-hoc Communication)を 構築し,LSACを支援するネットワーク技術について研究している.
従来のネットワーク技術では,LSAC環境が考慮されておらず,非常に煩わしい手順や複
エアコン エアコンエアコン エアコン 扇風機扇風機扇風機
扇風機
照明 照明 照明 照明
通信端末 通信端末 通信端末
((((ユーザ通信端末ユーザユーザユーザA)A)A)A)
自分 自分自分 自分のののの 通信端末 通信端末 通信端末 通信端末
図 1.1: 近隣端末との通信環境例
便性を左右する重要な要素技術であるために,従来のネットワーク上の仕組みをそのまま流 用することは適当でない.LSACは,見えている端末との通信を実現することが目的である.
すなわち,見えることが通信のトリガーとなるために,その端末の物理的な配置をユーザの 目で確認できることがLSACの前提となっている.このことから,端末の配置情報(すなわ ち端末との相対的な位置情報)が通信相手の特定を,より直感的に補助する重要な鍵となる と考えられる.図1.1に近隣端末との通信環境例を示す.ユビキタスコンピューティング環 境では,いつでも・どこでも様々な機器と通信可能なことが想定される.このような環境下 で通信対象を選択する場合,従来の方式では,通信対象のネットワーク上でのIDを自分の通 信端末に直接入力するか,赤外線やNFC(Near field communication)[3]でIDをやりとりす るか,または通信可能端末の一覧から自分の通信したい相手のネットワーク上でのIDを探 す必要がある(図1.2).これに対して,本研究が目指しているのは図1.3に示す位置情報を 利用した通信対象の選択である.すなわち,通信対象がその位置情報とともに端末上に表示 されることで,実際に目に見えている対象を端末上で直感的に選択することが出来る.他に
図 1.2: 名前のリストを使った通信対象の選択イメージ
も,会議や講義,講演会などにおいて,参加者の位置が把握できれば,質問者の端末に直接 参考資料や自分の連絡先を伝えるのに役立つほか,お祭りや展示会などのイベント,普段の 買い物や観光において,一緒に行動する家族や友人の位置をを把握できれば,はぐれること を心配せずに自由に行動することが出来る.
本研究の目的は,LSAC環境における通信相手の特定を支援することである.この目的を 達成するために,本研究では名前解決ミドルウェアを提案する.このミドルウェアは,従来 の名前を用いることに加えて,周辺端末との相対位置を補助的に提示し,LSAC環境におけ る通信相手の特定を効果的に支援するものである.提案ミドルウェアは,次の特徴を有する.
(1) 提案ミドルウェアの機能を,アプリケーションが柔軟に利用できるように,シンプルな
自分 自分 自分 自分
エアコン エアコン エアコン
照明 エアコン
照明 照明照明
扇風機 扇風機 扇風機 扇風機
ユーザ ユーザ ユーザ ユーザAAAA
チャット ファイル送信 自分 自分 自分 自分
エアコン エアコン エアコン
照明 エアコン
照明 照明照明
扇風機 扇風機 扇風機 扇風機
ユーザ ユーザ ユーザ ユーザAAAA
チャット ファイル送信
図 1.3: 位置情報を使った通信対象の選択イメージ
API(Application Program Interface)を提供する.(2)LSAC環境では専用サーバをあらかじ め配置することができない.従って,提案ミドルウェアはこのような専用サーバが存在しな い環境でも動作が可能である.また,PDA程度の処理能力でも動作が可能である.(3) キャ リブレーションを必要とせずに,周囲の端末の相対位置を取得可能であるWiPS(Wireless LAN indoor Positioning System)[4]をベースにした測位手法を採用している.また,提案ミ ドルウェアのプロトタイプシステムを構築し,応用プログラムの作成と基礎的な評価を行っ た.評価の結果から,PDA程度の処理能力で十分に提案ミドルウェアを稼働できることを示 した.
また,本研究で想定するローカルな近距離無線通信の課題として,端末の認証問題が挙げ
られる[5].ローカルな近距離無線通信では,必ずしも信用の置ける認証局を利用できるとは 限らない[6].この解決策として,LSACネットワーク上で端末を相互に認証する手法の提案 と開発について述べる.本手法は認証局を用いずに相互に端末を認証し,互いに認証した端 末間で暗号化を行ったファイル共有を実現し,主に中間者攻撃と誤った端末への送信を防ぐ 効果を持つ.端末の相互認証には公開鍵暗号を用いるが,互いに対面する利用者間の信頼関 係をよりどころとして,利用者が互いの端末の公開鍵を確認しあうことで,相互認証を実現 する.認証手順の中に人間の確認作業を含めるman-in-the-loopアプローチによって,利用者 自身が認証の有無を明らかに認識することができるため,誤った端末への送信が防がれる.
1.3 構成
本論文の構成は以下の通りである.第2章では,本研究の鍵となる位置推定に用いられる 基本的な位置測定方式について述べ,これまで行われてきた通信端末の位置を同定する研究,
開発について紹介する.また,基本的な認証方式についても述べる.第3章では本研究の想 定環境であるLSACについて述べ,第4章で提案ミドルウェアの設計と各構成要素の詳細に ついて述べる.第5章では,認証局を用いずに相互に端末を認証する手法について提案する.
第6章で位置計算処理にかかる時間のシミュレーション結果や無線LANを利用した応用例を 示し,提案ミドルウェアの実現性,有用性について評価するほか,提案した認証手法につい ての実装と,実験的な評価について記述する.また提案手法の各種攻撃に対する耐性につい て考察する.最後に第7章で本研究をまとめる.
第
2章 関連研究
本章では,2.1節において,直接入力する以外の方法で,通信相手を同定する関連技術につ いて述べる.また,本研究で鍵となる位置推定に関して,2.2節にて,位置推定に用いられる 基本的な位置測定方式について説明し,2.3節にて,位置情報を用いて通信端末を同定する関 連技術について紹介する.2.4節で認証方式について関連研究を示す.
2.1 通信識別子交換技術
ユーザが端末に直接入力する以外の方法で通信識別子の取得,交換を行なう関連技術につ いて述べる.ここでは通信識別子としてIPやMACアドレスの他,メールアドレスや,Skype やインスタントメッセンジャーなどのアプリケーションのアカウント名やID等,メッセージ やファイルの送信先を指定できるものを広義に含むものとする.
古典的な手段として,通信ケーブルやUSBメモリなどの物理的な媒体を経由しての通信識 別子の受け渡しが挙げられる.これには端末とは別にケーブルやUSBメモリを持ち歩く必要 がある他,通信を行なうにあたって機器への接続が必要であり,その煩雑さから通信識別子 の交換には一般的には用いられない.
本来の通信とは別の近距離無線通信手段を利用して識別子の交換を行なう手法が存在する.
赤外線通信や,NFC(Near field communication)である.どちらも専用のデバイスを必要と
し,互いの端末(の受光部)を接近させる必要がある.また,基本的に一対一の片方向通信 を想定しており,複数の利用者間で互いに情報を交換することには不向きである.
端末に搭載されたカメラを利用して画像情報から通信識別子を読み取る方法もある.これ には,画像から文字列を読み取る光学文字認識(OCR: optical character recognition)はその 不確かさからあまり用いられず,デンソーウェーブのQRコード[7]に代表される二次元バー コードが用いられるのが一般的である.カメラは最近の日本の携帯電話には一般的に搭載さ れており,その利用範囲は広い.しかし,読み取るためにはカメラの距離や角度を調整する 必要があり,また赤外線やNFC同様,複数の利用者間で互いに情報を交換するには煩雑さが 伴う.画像認識を用いたAR(augmented reality)技術により,カメラの画像情報を元に読 み取った特徴情報から対象端末の識別を自動的に行なうことも考えられるが,その識別精度 は限られており,メールアドレスやアカウント名のように数十バイトの情報に相当する量の 端末を識別するには,二次元バーコードと同等の複雑さの画像的特長を正確に判別する必要 があり,現状の技術では難しい.
スマートフォンアプリとして普及しているBump[8]は互いの端末をぶつけることで振動し た時間,GPSから取得した位置情報等を元に端末のマッチングを行ない,情報を交換する仕 組みである.Bumpはバックボーンのネットワークに接続されていることを前提としている ため,LSAC環境では用いることができない.また,近くにある別の端末とマッチングして しまうセキュリティ上の問題もある.
ネットワークに接続されている端末の一覧を取得し,その中から通信対象を選択する方式 も存在する.具体的なサービスとしては,WindowsのマイネットワークやLINEのふるふる 検索機能[9]が挙げられる.これらの手法では,端末の表示名もしくは識別子の取得は自動的 に行なわれるため利便性が高い.しかし,通信相手のネットワーク上での名前を知り,それ を端末の一覧から探し出すという手間が必要となる.
r1
位置推定対象
基準1 基準2
r2
図 2.1: 距離による位置推定
2.2 位置測定方式
近年,無線端末の位置測定に関する研究が盛んに行われている.位置を推定するのに用い られる技術は大きく以下に分類できる.すなわち,1)三辺測量,2)三角測量,3)距離と角 度を組み合わせた位置測定,4)近傍判定,5)機械学習によるものである.
三辺測量,三角測量,距離と角度を組み合わせた位置測定手法は古くから地図作成のため の測量技術として用いられてきた手法である.地図作成における測量では,測量対象の位置 の時間的変化はほとんど考慮されない代わりに位置の測定に精確さが求められる.また,こ れらの手法における位置測定の精度は,距離や角度の測定の精度に大きく依存する.一方,
本研究で対象とする無線通信環境では,端末位置の測定に測量ほどの精度は求められない代 わりに,端末の位置は移動により頻繁に変化するため,即時性が求められる.
三辺測量は基準となる2点と,位置を求めたい第3点との距離を測定することで第3点の 位置を決定する(図2.1).基準となる2点から第3点までの距離を用いて基準となる2点を それぞれ中心とする円を描き,その交点として第3点の位置を求める.無線端末の位置推定
θ2 θ1
位置推定対象
基準1 基準2
図 2.2: 角度による位置推定
θ1
基準1
位置推定対象 r1
図 2.3: 距離と角度を組み合わせた位置推定
の場合,基準点と端末との距離を測定する方式として受信信号強度(RSS; Received Signal Strength)を用いる方式と,電波の到達時間の差(TDOA; Time Differecnce of Arrival)を 用いる方式がある.無線システムに関する標準化や勧告を行っているITU-R P.525-2[10]にお いて勧告されている自由空間での電波の伝搬損失モデルは式(2.1)で与えられる.
Lbf = 20 log(4πd
λ ) (2.1)
ただし,式内の記号はそれぞれ以下を表す.
Lbf : 自由空間における伝搬損失(dB) d : 送信機と受信機間の距離
λ : 波長
また,式(2.1)内の波長λを周波数に置き換えると式(2.2)のようになる.
Lbf = 32.4 + 20 logf+ 20 logd (2.2) ただし,式内の記号はそれぞれ以下を表す.
f : 周波数(MHz) d : 距離(km)
ITU-R P.1238-1[11]で勧告されている屋内での伝搬損失モデルは式(2.3)で与えられる.
Ltotal = 20 log10(f) +Nlog10(d) +Lf(n)−28 (2.3) ただし,式内の記号はそれぞれ以下を表す.
N : 距離による減衰率 f : 周波数(MHz)
d : 送信機と受信機間の距離(m) Lf : 壁による減衰関数(dB)
n : 送信機と受信機の間にある壁の枚数
受信信号強度による距離測定は実際の生活環境においては,反射やマルチパスの影響を受 けやすくTDOAによる距離測定よりも精度が低い.このため,2.3節で述べる受信信号強度 を用いた位置推定技術の多くは事前の較正作業(キャリブレーション)を必要とする.一方,
TDOAを用いた距離測定は精度が高いものの,精確な時間の同期をとるための専用の設備が 必要であり,コストがかかる.
三角測量は基準となる2点と,位置を求めたい第3点との角度を計測することで第3点の 位置を決定する(図2.2).基準となる2点と第3点との角度を用いて基準となる2点からそ れぞれ半直線を引き,その交点として第3点の位置を求める.無線端末における角度の計測 としては,アンテナの指向性を利用したものが挙げられる.
距離と角度を組み合わせた位置測定手法では,基準となる点と,位置を求めたい点との距 離と角度を計測することで対象の点の位置を決定する(図2.3).距離を用いて基準となる点 を中心とする円を描き,また角度を用いて基準点からの半直線を引き,その交点として位置 測定対象の位置を決定する.
近傍判定は,測位対象がある特定の場所の近くに存在するか否かを判定する方式である.
例えば,基準点に赤外線機器や無線LANのアクセスポイントを設置し,測位対象となる端 末との通信が可能であるか否かをもってその近接性の判定とする.この方式では通信可能エ リアが他の基準点と一部重なる基準点を複数設置することで,測位対象が存在しているエリ アをより詳細に限定することが可能である.この方式は測位対象の存在するおおまかなエリ アを特定する手法であり,測位対象の精確な位置を特定することには不向きである.しかし ながら,端末の詳細な位置情報は必要とせず,そのおおまかなエリアが特定できればよいと いう需要も数多く存在する.例を挙げると,いくつかの機器をユーザが近くにいるときにだ け電源を入れるようにしたい,今現在お店の近くにいる人にだけ広告を打ちたいなどの需要 である.このようなサービスにおいては近傍判定は有用であると言える.
機械学習に基づく位置測定方式は,基準点と測位対象との精確な位置や角度の測定が困難 な場合に用いられる手法である.無線LANの受信信号強度を用いる位置推定がこれに該当
する.この方式では,あらかじめ様々な位置で複数のアクセスポイントとの受信信号強度を 測定する較正作業を行い,学習データとして記録しておく.実際の位置測定を行なう際には,
測位対象端末と複数のアクセスポイントとの受信信号強度情報を学習データと照合し,類似 度の高い位置を推定位置とする.この方式は反射やマルチパスなどの環境要因による測定誤 差の影響を受けにくい.
2.3 位置情報による端末同定手法
GPS(Global Positioning System)[12]は,航空機や船舶の位置特定やカーナビゲーション 等で使用されている測位システムであり,既存の端末測位システムの中では最も一般生活へ の普及が進んでいる.この測位システムは地球上を周回する24基のGPS用人工衛星のうち の4つを使用して,地上にある端末の測位を行なう.それぞれの人工衛星は一定周期で測位の ための電波を送信しており,その電波には自身の位置の3次元座標情報と電波を送信した時 刻を乗せている.測位端末はその電波を受信し,衛星の位置座標と電波が送信されてから受 信されるまでの時間から求めた距離から3辺測量により端末の位置を特定する.(図2.4参照) GPSでは,測位端末単独での測位で約10mの測位誤差が生じる.またDifferential GPSな ど,座標のわかっている基準点を利用した手法や,高速スタティック測位のように複数のア ンテナを使用した測位手法があり,さらに精度を高めることは可能である.測位範囲は,衛 星からの電波が受信できる範囲であり,理論上は地球上のあらゆる場所で測位が可能である.
しかし,山や壁等の障害物により衛星からの電波が遮蔽されてしまうため,ビルの多い街中 など,上空への見通しが悪い場所では測位ができない場合がある.また屋内での測位は,天 井があるため不可能である.
GPS以外の測位システムでは,センサーネットワークを利用したものが提案されている.
文献[13]では,アドホックセンサーネットワークを利用した測位手法を提案している.端末の 存在を感知したセンサーと,基準点となるセンサー間で通信するのに必要なホップ数を数え,
そのホップ数を距離に換算し,三辺測量により端末の位置を推定している.またActiveBat[14]
やDOLPHIN[15]は超音波を利用した測位手法である.その他では赤外線センサーを使った端
GPS receiver
S1:( X1, Y1, Z1, t1)
S2:( X2, Y2, Z2, t2) S3:( X3, Y3, Z3, t3)
S4:( X4, Y4, Z4, t4)
Dist( S1, R1 ) = ⊿t1x c
R1
Dist( S1, S2 )
= ||S
2–S
1||
Si:GPS用人工衛星 Ri:GPS信号受信端末
⊿ti: 電波の滞空時間 c:光速
Dist( S2, R1 ) = ⊿t2x c
図 2.4: GPS衛星による3辺測量
末位置特定システム[16]が実装されている.
センサーネットワーク,赤外線,超音波を利用する測位システムでは,理想的な環境であ れば数m〜数cmの誤差で測位が可能であるが,測位専用の機器が必要であったり,センサー を大量に設置したりしなければならないなど,導入の際のコストがかかる.また赤外線は壁 や障害物などを透過せず,超音波も反射が起こるため,基準点と測位端末との間に見通しが なければならないなどの特徴があり,測位環境の影響が大きい.
そのほか,携帯電話の普及やサービスの多様化,無線LAN機器の普及などから,携帯電話 網やIEEE 802.11に準拠した無線LAN,BlueToothなど,本来は無線通信サービスのために 使用しているインフラを利用した測位手法が盛んに検討,商用化されている.
無線LANを利用した測位システムでは,市販のアクセスポイントやそのほかのIEEE 802.11 準拠のフレームを送信することのできるデバイスを基準点として用い,ラップトップコンピュー タやPDA等の無線LANクライアント機能を搭載した機器を測位端末として,それらの位置 を特定することを目的としている.基本的には,位置が既知である基準点と測位端末間で電
波の送受信を行い,その際の電波強度情報や電波の到達時刻差,電波を受信できた基準点の 情報などから,測位端末の位置を2次元,3次元の座標情報や,場所名で位置を提示する.
無線LANを利用した端末測位手法や精度向上手法に関して,これまでに数多くの試みが なされている.その中で測位手法に関しては,無線LANの通信電波の受信電波強度を利用 した端末測位が多く検討されている.
WLAN client
AP1
AP3 AP2
AP4 R1
RSSI1 = -30
RSSI3 = -50 RSSI2 = -40
RSSI4 = -45
受信電波強度 データベース
位置推定結果 受信電波強度情報
{ ( 座標),,,,( 電波強度) }
{ ( Xi ,Yi , Zi ), ( RSSIi ) }
図 2.5: 電波強度データベースによる測位
受信電波強度を利用した位置の推定手法に関して,RADAR[17]では,受信電波強度データ ベースと測位端末が測定した受信電波強度情報とを比較して,位置の推定を行っている(図 2.5参照).この手法では,あらかじめ測位範囲内の各地点で,電波を観測できる基準点とそ の強度を記録したデータベースを作成しておく.そして測位を行なう際は,基準点からの電 波の強度を測定し,その結果と受信電波強度データベースの受信電波強度データを比較する ことで端末の位置を推定する手法である.
さらに,電波の自由伝播モデルや,経験的に得られた関数を使用し受信電波強度情報を距
WLAN client
AP1:( X1, Y1, Z1)
AP3:( X3, Y3, Z3) AP2:( X2, Y2, Z2)
AP4:( X4, Y4, Z4)
RSSI1 = -30
Dist( AP1, R1) = 11.6 (m)
RSSIi:受信電波強度( Receive Signal Strength Information ) Ri:無線LAN端末
APi:基準点(アクセスポイント)
距離とRSSIの変換式(例):d( rssi )= ( 0.125 / 4π)・10( 31.0 –rssi) / 20.0 (m) RSSI2 = -40
Dist( AP1, R1) = 35.2 (m) Dist( AP1, AP 2 )
= ||AP2–AP1||
R1
図 2.6: 電波の伝播モデルを利用した3辺測量による測位
離に換算し,3辺測量により端末位置を特定する手法が存在する(図2.6参照).CMU-TMI[18]
では,経験的に得られた関数を使って受信電波強度を距離に換算し,3辺測量にて測位を行っ ている.その際,電波強度が強い上位3つの基準点を選択することで,障害物による減衰や マルチパスの影響を受けた電波強度情報を排除し,高信頼の測位を行っている.WiPS[4]で は,測位端末と基準点との間の電波強度だけではなく,測位端末間でも相互に電波強度を測 定し測位に利用するという方式で,特徴として測位対象が密集しているほど測位精度が向上 する点と,基準点の密度が疎であっても測位精度の低下が少ない点が挙げられる.
センサーネットワーク上のセンサーまたはそれらが持つ情報をGoogleMap,GoogleEarth,
Virtual Earthなどのマップ上に配置し,センサーネットワークのためのグラフィカルなユーザ
インタフェースを実現する研究が行われている[19, 20].Geo-Coding[21]では,このようなユー ザインタフェースを介してセンサーネットワーク上の各センサーとの双方向の情報交換を可 能にし,ネットワークの運用コストおよび管理コストを削減している.しかしながら,事前
に組織化されたネットワークが前提となっており(すなわち,各センサーの位置を手動で設 定する必要がある),加えてサーバ計算機が必要であることから,本研究とは異なる環境を 対象としている.
端末の位置が既知でないような環境で,自律的に端末の位置を測定するシステムも存在す る.位置情報を測位するシステムでは,端末にIDを割り当てた受信機を装備し,その受信機 の位置を測定することで,IDと位置情報から端末を同定することができる.このようなシス テムとしては,主に超音波を用いたもの,無線を用いたもの,およびそれらを複合して利用 するもの[22]に分類できる.超音波を使ったシステムとして,Active Bat[23]やDOLPHIN[24]
が挙げられる.これらのシステムは,特定の環境下において端末の位置を正確に測定するこ とに主眼を置いている.特定の環境とは,あらかじめネットワークに接続された超音波受信 機を天井に複数配置した環境である.これらを利用して,IDを持つ超音波発信機を備えた端 末の位置を測定する.測位精度は3cm〜20cm と高精度であるが,専用の設備の導入にコス トがかかる.
一方無線を用いたシステムとして,RADAR[25]とBradio[26] などが挙げられる.RADAR は,無線LANの受信信号強度情報を用いた測位システムであり,端末の存在するエリア(部 屋)を特定することを目的としている.複数の無線基地局およびデータベースを利用して測 位対象となる無線端末の位置を推定する.このシステムでは,あらかじめ測位範囲内の各エ リアで基地局の受信信号強度を測定しておき,データベースを作成しておく.実際に無線端 末の位置を測定する際には,対象端末と基地局間の受信信号強度を観測し,データベースの 情報と照らし合わせて,端末の存在するエリアを推定する.あらかじめデータベースを作成 する必要があることから,その場で構成されるネットワーク上での利用には適さない.
また,アドホックネットワークにおいて端末位置を測位する研究がなされている.文献 [27, 28]では,SOM(Self-Organizing Maps)と呼ばれる手法をアドホックネットワークに適 用し,端末が協調して位置を求める手法を提案している.固定アクセスポイントを仮定してい る点,およびマルチホップを考慮している点で,本研究とは異なる環境を対象としている.ま た,ANMP[29]は,アドホックネットワークの管理プロトコルとして,IPネットワーク上で幅

![表 6.1: 位置計算サーバに必要な計算資源 端末数 メモリ使用量 [KB] 5 3700 10 3704 20 3716 40 3764 表 6.2: 位置計算サーバの通信量 端末数 通信量 [KB/s] 5 2 10 8 20 34 40 135 布する位置情報は,端末数× 76[B] である.端末数が 10 台,各端末が 1 秒間に 1 回のリクエス トを送ってくる場合,位置計算サーバ,セッションマネージャ間の通信量は,(10 + 10 × 76) × 10 = 7700[B/s] である.よって端末](https://thumb-ap.123doks.com/thumbv2/123deta/9920249.1920568/71.892.292.580.145.613/位置計算サーバメモリサーバリクエスサーバセッションマネージャ.webp)
![表 6.3: 携帯端末での位置計算処理時間 [ms] 端末数 ノート PC初回 ノート PC2回目 PDA初回 PDA2 回目 5 0.43 0.35 104 90 10 2.5 1.8 523 361 20 15 9 2088 1278 40 98 53 - -405060708090100 0 5 10 15 20 25 30 35 40 ノード数計算時間の割合[%] 図 6.4: 2 回目以降の計算時間の初回に対する割合 も十分に測位サービスを提供できると考える.端末数がさらに多い場合や,高いリアル](https://thumb-ap.123doks.com/thumbv2/123deta/9920249.1920568/73.892.249.644.152.376/ノートノートノードに対するサービスできる考えるさらにリアル.webp)