平成30年度 修 士 論 文
前橋市中央児童遊園「るなぱあく」
における磁気浮上型水力発電機の実証実験
指導教員 栗田 伸幸 准教授
群馬大学大学院理工学府 理工学専攻
電子情報・数理教育プログラム
茂木 拓夢
1 第1 章 序論 2 1.1 研究背景 2 1.2 研究目的 3 第2 章 実験装置の概要 4 2.1 実験装置の概要 4 2.2 動作原理 9 2.3 制御系の構成 11 2.4 回生回路の構成 12 2.4.1 バッテリチャージャ 12 2.4.2 電圧リミッタ 14 2.4.3 整流回路 15 第3 章 マグネットカップリングの再検討 16 3.1 マグネットカップリングの再検討 16 3.2 マグネットカップリングの再製作 17 第 4 章 「るなぱあく」について 19 4.1 「るなぱあく」の概要 19 4.2 防塵防水対策(磁気軸受のモールド) 24 第5 章 「るなぱあく」での実験 28 5.1 新技術、経済性の検討項目 28 5.2 磁気軸受と玉軸受の発電効率の比較 28 5.3 制御方式による特性の比較 30 5.4 バッテリチャージャの特性試験 31 5.5 制御方式による発電効率の比較 34 第6 章 問題点および課題 40 6.1 今後の取組みについて 40 6.2 まとめ 41 謝辞 42 参考文献 43 発表論文 43
2
第
1 章 序論
1.1 研究背景
近年、火力発電による CO2の排出、原子力発電では使用済み燃料の処理方法 が問題となっている。また地球温暖化、化石燃料の枯渇への懸念からエネルギー の有効利用及び再生可能エネルギーの使用・開発が盛んに行われている。特に 2011 年 3 月 11 日に発生した東日本大震災によって明らかとなった核分裂エネ ルギー利用の難しさも相まって、この流れは更に加速すると考えられる。 主な再生可能エネルギーには、太陽光、風力、水力があげられる。 太陽光発電は日照時間帯のみの発電という制限はあるが、電力変換効率の改 善などにより有効な発電となりつつあるが、いずれにせよ蓄電デバイスの性能 によって有効利用できる電力が決まってくる。 風力発電は、一箇所あたりの発電量が大きい事が特徴としてあげられるが、バ ードストライクや低周波騒音といった人間を含む生態系への影響が無視できず、 更に落雷等による破壊に伴うメンテナンスコストが高いといった課題があり、 洋上風力発電が実用化され始めているものの、未だ解決されてはいない。 水力発電は、流れ込み式の場合、定常的な発電が可能であるという他の自然エ ネルギーには無い大きな特徴を持つ。また貯水池式であれば、電力不足時のみエ ネルギーを取り出せる、いわば自然の一次電池と言える特徴がある。大規模水源 開発率は80%を占めているものの、中小規模開発率は 40%にとどまっており、 潜在的なエネルギー量が大きい。しかしながら流水というエネルギー密度の高 い物体を扱うには頑強な設備と豊富なノウハウが必要である。その為、近年マイ クロ水力発電あるいはピコ水力発電といった、数10W~数 kW 程度の極めて小 規模な水力発電の設置事例が増えている。3
1.2 研究目的
従来の水力発電機には玉軸受が用いられており、玉軸受が機械的な摩擦で消 耗し、メンテナンスをする必要が出てくる。また回転摩擦や磨耗が起こり、メン テンスの回数が多くなるだけではなく回転損失が発生するといったデメリット が生じている。 本研究では、小規模水力発電機の普及の観点からメンテナンス性に着目する。 そこで、磁気浮上技術を用いることで機械的な接触を完全になくし、従来と比較 して玉軸受の消耗がなく、携帯性及び組み立て性に優れた発電機の開発を行っ た。そこで、小規模発電の実証実験として前橋市の用水路を用いて実験を行い、 発電機の特性や回生回路の特性を明らかにしていくことを目的としている。4
第
2 章 実験装置の概要
2.1 実験装置の概要
本研究室が開発した発電システムの機能ブロック図を図2.1 に示す。まず初め に全体の流れを簡単に説明する。 バッテリ電源の出力は 3 種類のスイッチングコンバータを介すことでそれぞ れの電圧が変位センサ、ディジタルコントローラ、PWM アンプに供給される。 変位センサはロータの位置を検出しその情報をディジタルコントローラに出力 する。ディジタルコントローラは入力信号を演算処理し、センサで得た情報をも とに指令電流値をPWM に出力する。PWM アンプは入力信号に従い、目標の位 置にロータを浮上させるだけの電流を磁気軸受のコイルに出力することでロー タは浮上する。 浮上している状態のロータは垂直方向からインペラに水を流すことにより回 転し、その回転力がマグネットカップリングを介して発電機へと伝わる。発電機 が回転することで発電が行われるという仕組みになっている。 このようにして得た電力は、整流回路を使用して直流に整流し、電圧リミッタ を通してバッテリチャージャに入力される。そこで電圧を変換し、バッテリへの 充電を行う。 図2.1.発電システム全体構成5
2.1.1.水車機構部
水力発電機の構成を図2.2 に示す。また水車機構部のパラメータを表 2.1 に示 す。磁気軸受、変位センサ、水車から成るユニットは本研究室が開発した、「三 次元的な磁気回路を有する永久磁石ハイブリッド型磁気軸受」を用いている。ロ ータの径方向 (x,y 軸) 2 軸と傾き (θx,θy) の計 4 自由度を制御するために磁気 軸受をロータの両端に 2 つ設置する。ロータ、ステータ間のエアギャップは 1 mm となっている。ロータの中央にインペラを設置し、インペラの両側に回転軸 の径方向 (x,y 軸) の変位を検出するセンサをそれぞれ 2 つずつ設置している。 また、マグネットカップリングを介することで発電機に動力伝達を行う。 図2.2.水車機構部 表2.1.水車機構部のパラメータ Rotor Φ:100 mm , W:248 mm Rotor mass 0.851 kg PM thickness 4 mm Bearing coil T:3 mm , N:360 Airgap 1 mm6
2.1.2.水車構成
水車の概要図を図2.3 に示す。マイクロ水力発電機として、中小河川や用水路 など小さな高低差を利用した水力発電機ということで水車部分には低落差でも 効率的にエネルギーを伝達することができるクロスフロー水車を用いることと した。上部より流入してきた水はガイドベーンを通ってインペラへと導かれる。 インペラへと入る水は外周を通って外周へと流れ出るためインペラの半径方向 にクロスして2 回作用し、効率よくエネルギーを伝達することができる。 図2.3.インペラの構造Guide vane
Impeller
7
2.1.3.磁気カップリング
本実験装置では磁気軸受によって支持されたロータと発電機との接続方法と して磁気カップリングを採用している。理由としては、水を流す場合、常に負荷 変動にさらされ、特に空気と混ざり合う混相流を形成する場合、より一層大きな 負荷変動を受けると考えられる。磁気軸受の能動制御による支持では制御の遅 れにより負荷変動が振動振幅に影響する。これは、回転軸が受ける衝撃力が小さ くなるメリットがある半面、カップリング部で大きな振動となるので、歯車を用 いるような機械的なカップリングは適さない。ユニバーサルジョイントを使う 事は可能だが、振動による損失増大の観点からやはり適さないと考えられる。そ こで、本研究では振動増大の影響を受けずに動力伝達を行う機構として、磁気カ ップリングを用いる。 磁気カップリングの概要図を図2.4 に示す。水車回転端部に 8 枚のセグメント 型磁石と、発電機底面に円周上に接着された32 枚の角型磁石とで構成されてい る。この構造が選ばれた理由として以下の2 つがある。 ・水車に対して反重力方向への力を発生させる事で、流体力による重力方向 の力を軽減できる。 ・発電機側の固定高さを変更する事で、カップリング部のエアギャップを調 整できるので、厳密な制御力とカップリング吸引力のバランスを考慮する 必要がない。 といった点である。今回は、磁気カップリングによるエアギャップは2mm で設 定されている。 なお,水車と発電機のギア比が1:4 であることから、減速機と同様の構成とな っている。そのため新しいカップリングを製作することで、ギア比を本システム に適した値にすることを考えている。 図2.4.磁気カップリング8
2.1.4.制御部
PC 上の dSPACE でシステムを駆動する場合、変位センサからの信号を ADC (アナログ・ディジタル変換器)で変換し、dSPACE ボードで読み込み、DSP での演算処理を経てDAC(ディジタル・アナログ変換器)での変換を経て、PWM アンプに信号が送られる。本研究室が構築した持ち運び可能なシステムでは、 PC により演算処理を行う dSPACE ボードの代わりの演算処理機としてプログ ラムの書き換え可能なFPGA というハードウェアを用いて動作をさせる。2.1.5.電力変換部
PC の持ち運びを必要としないシステム開発にあたり、自動車用の鉛畜電池 12V によって全システムを駆動出来るシステムとする。鉛蓄電池としたのは、 最終的にこの発電システムによって発電された電力を貯蔵するという目標から 大容量の二次電池である事が望まれた為と、研究室の資産を有効活用する為で ある。12V から水車機構部及び制御部に供給する電圧は、それぞれ FPGA に 5V、 センサに18V、PWM アンプに 48V と 3 種類必要である為、3 種類の DC-DC コ ンバータを搭載している。このように12V 鉛蓄電池によってシステムが起動す ると、発電が開始される。発電機の出力は交流の電力のため、整流ダイオードを 用いて直流に変換する。流水の状態によっては電圧が大きくなってしまうこと が予想されるためバッテリチャージャに入力する前に電圧リミッタで一定以上 の電圧にならないように電圧に制限を設けている。その後、バッテリチャージャ を通して電圧を12V 鉛蓄電池より少し高い電圧に変換し、12V 鉛蓄電池へと電 力を回生する。以上を電力変換部とする。9
2.2 動作原理
本研究室が製作した磁気軸受の軸支持の仕組みを説明する。図2.5 に磁気軸受 けの構成を示す。また3 次元 CAD 設計ソフトウェア SOLID WORKS を用いて 描いた磁気軸受の構成と、永久磁石により発生するバイアス磁束の流れを図2.6 に示す。これをコイルの磁力と永久磁石の吸引力で軸を支持する、ハイブリッド 型磁気ベアリング(Hybrid Magnetic bearing ; HMB)とする。
図2.5(a)はステータリングの突極にコイルを巻いている図であり、(b)は(a)の奥 に(a)を 90°回転させて重ねた図である。(b)をラジアル方向から見た図が(c)であ り、ステータリングの間には永久磁石を挟み込んでいる。 (a) ステータとコイル (b) (a)と(a)を 90°ずらし重ねた図 (c) (b)をラジアル方向から見た図 図2.5.磁気軸受の構成 図2.6 は円筒型のネオジム永久磁石を挟む二枚のステータリング、ステータ 突極、そこに巻かれるコイルによって構成される。ロータ側は外側が積層鋼 板、内側が純鉄で構成されており、真ん中をステンレスのシャフトが通る。磁 路は(b)の赤い矢印のようになる。
10 (a)磁気軸受のモデル (b)バイアス磁束の流れ 図2.6.ハイブリッド型磁気軸受 次にハイブリッド型磁気軸受をアキシャル方向から見た図と、制御の様子を 図2.7 に示す。上で述べたバイアス磁束が流れている状態でロータが右側に変位 したとする。このとき、左側のエアギャップではバイアス磁束と制御磁束が強め 合うように、逆に右側のエアギャップでは弱め合うようにコイルに制御電流を 流し、図の青線のような向きの制御磁束を発生させる。その結果、左向きの吸引 力が発生しロータを制御する。 このように左右方向は手前のステータリングとコイル、上下方向の制御は奥 のステータリングとコイルで制御する。 図2.7.アキシャル方向から見た磁気軸受 Bias flux Control flux Attractive flux
11
2.3 制御系の構成
発電システムの開発にあたって、最終的には屋外での実験が必要となってく る事から、現在はPC を使用している実験環境を、独立したシステムとする必要 があると考える。独立システムの構築方法は様々であるが、dSPACE システム との互換性を考えるとディジタルコントローラが適している。ディジタルコン トローラを構築するには主に2 種類の方法がある。 一つは、DSP や PIC、H8 あるいは SH といったマイクロコントローラを用 いる方法であり、複雑な制御則も高級言語を使う事で比較的容易にプログラミ ングでき、スピーディーな開発が可能な半面、高速なシステム構築の為にはクロ ックの高速化が必要である為に消費電力は大きくなる傾向にある事や、割り込 み処理の並列化によって実現する多軸制御の制御軸数がクロックに制限される といった特徴がある。これとは別に FPGA:Field Programmable Gate Array や CPLD:Complex Programmable Logic Device といったプログラマブル論理デバイスを用いる方 法がある。この方法では、四則演算をハードウェアで実現し、また複数の処理を 同時並列に実行できる事から非常に高速なシステムを比較的低いクロック周波 数で実現する事が可能である。但し、処理内容を組み合わせ回路と順序回路によ って構成する必要がある為、Verilog-HDL や VHDL といったハードウェア記述 言語を用いなければならないといった制約がある。 以上の事を踏まえ、多軸能動制御を特徴とする磁気浮上系を制御対象とし、発 電システムであるから消費電力は抑えながら、現在のdSPACE 環境で使われて いる10kSps 処理能力を持たせるには FPGA が最も適していると判断している terasIC 社の DE0-nano ボードを使用する。このボードはその名の通り、非常 に小さく、学習ボードでありながらインターフェイスは必要最小限にとどめら れており、搭載されているALTERA 社の CycloneⅣ EP4CE22F17C6N は低コ スト、低消費電力である事から本研究に適していると考える。 また、学習ボードを使用する別の理由として、動作に必須の電源、発振器、 FPGA、コンフィギュレーションデバイスが一つの基板上に搭載されている事が あげられる。これらを手作業で製作する場合、その配線は長くなり、配線インダ クタンスの影響等でパルスの正確な伝送が難しくなるばかりでなく、物理的に 隣接する信号のクロストークを受けると考えられる。電源に関しては、素子に合 わせて複数のDC-DC コンバータを必要とする事から、手作業で製作した場合に は大幅なサイズアップが見込まれたので、学習ボードが適していると判断して いる。学習ボードは図2.8 に示す。
12 図2.8.学習ボード
2.4 回生回路の構成
発電機からの出力はバッテリに充電する必要がある。そこで、発電機の電圧を 昇降圧する回路を使用することによりバッテリへの充電を可能にする。その為、 バッテリチャージャを利用し発電機の電圧をバッテリよりも少し高い電圧に変 圧し、バッテリへの充電を行う。その際に発電機の電圧が上昇しバッテリチャー ジャへの電圧の入力が高くなってしまう恐れがあるため保護回路を使用するこ とが望ましい。また、バッテリチャージャへの入力は直流電源での入力が必要で あり発電機の出力は交流電源であるため整流回路を使用し交流の電源を直流の 電源に変換する必要がある。2.4.1 バッテリチャージャ
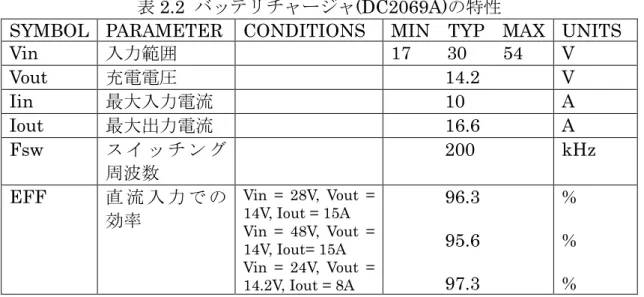
本研究で使用するバッテリチャージャは LT8490(Linear Technology)の素子 を用いた DC2069A というデモボードを使用している。その特性を表 2.2 に示 す。このデモボードは入力電流や入力電圧に制限があるためその値を超えるこ との無いように気を付ける必要がある。発電機の回転数が高いときにバッテリ チャージャの制限電圧を超えてしまう可能性があるため、電圧リミッタを使用 して電圧が上昇したときに制限を行う。13
表2.2 バッテリチャージャ(DC2069A)の特性
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS Vin 入力範囲 17 30 54 V Vout 充電電圧 14.2 V Iin 最大入力電流 10 A Iout 最大出力電流 16.6 A Fsw ス イ ッ チ ン グ 周波数 200 kHz EFF 直 流 入 力 で の 効率 Vin = 28V, Vout = 14V, Iout = 15A Vin = 48V, Vout = 14V, Iout= 15A Vin = 24V, Vout = 14.2V, Iout = 8A 96.3 95.6 97.3 % % % 図2.9 バッテリチャージャ(DC2069A)
14
2.4.2 電圧リミッタ
発電機の回転数が多くなった時に電圧が大きくなってしまうため、保護回路 として電圧リミッタを設けている。 バッテリチャージャの最大入力電圧が54V のため、電圧リミッタを用いて発 電機の電圧の出力を54V 以下に制限する。 電圧リミッタの回路図を図2.10 に示す。また、製作した電圧リミッタを図 2.11 に示す。 電圧リミッタはR2 と R3 の抵抗で分圧した電圧の値が 2.5V 以上になるとア ノードからカソードへと電流が流れ、電圧の制限を行う(式2.1 参照)。 また、この電圧リミッタは電圧が制限電圧以上になると素子が熱を帯びてし まうため素子の破壊を防ぐことを目的にヒートシンクを取り付けることで熱の 放出を助けている。 (E・R3)/(R2+R3) ≧ 2.5𝑉 (2.1) *E 入力電圧 R2,R3 抵抗 図2.10 電圧リミッタ回路図15 図2.11 電圧リミッタ
2.4.3 整流回路
発電機の出力は交流電源でバッテリチャージャは直流電源により起動するた め交流電源を直流電源に整流する必要がある。そこで、ダイオードを用いて発 電機の出力を整流する必要がある。 図2.12 整流回路16
第
3 章 マグネットカップリングの再検討
3.1 マグネットカップリングの再検討
図2.4 に示すように従来のマグネットカップリングは、ギア比 1:4 の比率でカ ップリングを行っていた。ロータ側が1、発電機側が 4 の比率となっており、発 電機側の回転速度が遅くなっている。そこでギア比を1:1 にし、ロータと発電機 の回転速度を同期することで発電量を増やすことが出来ると考え、マグネット カップリングの再検討を行った。製作したマグネットカップリングのイメージ を図3.1 に示す。水車回転端部に 8 枚のセグメント型磁石と,発電機側面にホル ダを取り付けその内側に 8 枚のセグメント型磁石を取り付けることにより構成 されている。また、マグネットカップリングを接続した水力発電機全体の構成を 図3.2 に示す。ロータと発電機を同軸上に配置することによりギア比 1:1 のカッ プリングを実現している。 図3.1.ギア比 1:1 のマグネットカップリング17 図3.2.マグネットカップリング変更後の水力発電機
3.2 マグネットカップリングの再製作
図3.3、図 3.4、図 3.5、図 3.6、図 3.7 に新しいマグネットカップリングの部 品を示す。T 字ホルダは発電機のシャフトを支持し、T 字ホルダ固定台に高さ 調整用台を挟んで固定する。永久磁石ホルダ内面には発電機側永久磁石を接着 し、水車とマグネットカップリングを構成する。 (a)左側 (b)右側 図3.3,T 字ホルダ取り付け用台18 図3.4.T 字ホルダ高さ調整用台 図 3.5.T 字ホルダ 図3.6.永久磁石ホルダ 図 3.7.発電機側永久磁石 以上の部品を用いて組み立てた実際の装置を図3.8 に示す。 図3.8.マグネットカップリング変更後の水力発電機
19
第 4 章 「るなぱあく」について
4.1 「るなぱあく」の概要
前橋市の児童用の小さな遊園地「るなぱあく」内にある用水路から出てくる水 を使用し、本研究で開発された磁気浮上型水力発電機を用いて実験を行うこと となった。 「るなぱあく」とは群馬県前橋市(前橋市大手町3丁目16−3)にある遊園 地で正式名称は前橋市中央児童遊園である。そこで流れている小さな用水路か ら水を引っ張ってきており、その水を使用することで磁気浮上型水力発電機の 発電実験を行う。 図 4.1 群馬県 図 4.2 前橋市20
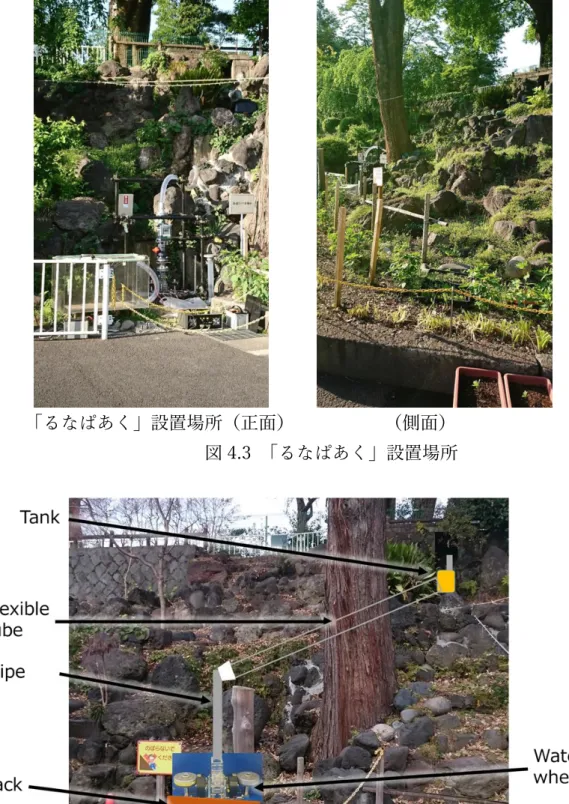
「るなぱあく」設置場所(正面) (側面) 図 4.3 「るなぱあく」設置場所
21 図 4.4 の裏側に用水路が流れており、その用水路にある水門を開くことで図 4.5 のタンクに水を引き入れる。タンクの水の出口にバルブを取り付けており、 そこを閉めることでタンクに水を溜める。タンクにはごみの流入を防止する目 的で上部にフィルターを取り付けている。タンクから径がΦ65 のフレキシブル 管に繋ぎ、そこからフランジを用いてΦ65 の塩ビ管に接続する。Φ65 は水力発 電機に流す流量を 8 L/s 以上にするために簡易的に式 4.1 の計算を行い決定し た。塩ビ管から水力発電機に水を流すことで装置を動かす。塩ビ管は、図 4.6 の パイプが透明なものを常設しておき、実験の際に流量計やバルブなどの取り付 けてある図 4.7 の測定用のバルブに取り換えることで流量などの測定が行える ようにした。 配管から水力発電機に流す流量の計算を行うと 流量は Q = AV で表される。 ベルヌーイの定理から V = √2 × P/ρ タンクの高さを 0.5m として、水が最大まで入っていると考えると P = 0.5×9.8 = 4.9 kPa Q = 0.065/2×0.065/2×π×√2 × 4.9×1000 ≒ 10 L/s (4.1) ※Q:流量 A:断面積 V:流速 P:圧力差 ρ:密度
22
図 4.5 農業用タンク
23
24
4.2 防塵防水対策(磁気軸受のモールド)
外部の施設で実験を行うため雨や落ち葉などの塵が発生することで軸受が故 障するなどといったことが危惧される。本装置は、磁気軸受のコイルがむき出し になっていたためそこを補強する目的で防塵防水対策としてモールド作業を行 った。 外部の業者にモールドの作業を委託したため、図 4.8 のようにモールドすると きの寸法を細かく決定しモールドの型を製作してもらい、そこからモールドの 樹脂を流し込むことでモールド作業を行ってもらった。モールドするに際して コイルには配線が 4 本出ているためそれを 1 つにまとめ上が赤色、下が青色、 左が黒色、右がオレンジ色と配線の色を分けることで上下と左右の配線がどの 色かで判断できるようにした。そして、配線の穴を作り、1 つにまとめることで モールドした際に配線が分かりやすいようにした。 図 4.8 モールド図面25 また、磁気軸受のコイルが本研究室で製作したもので、手作業で製作している ためにコイルの大きさが軸受の本来の図面とサイズが違うということが分かっ た。そこで軸受のそれぞれのコイルの大きさを計測し左右の軸受のモールドの 幅を決定した。 図 4.9 が水力発電機のモールドイメージで右側と左側でコイルの大きさを示 したものが図 4.10 となっている。コイルの大きさよりも少し大きくなるように モールドをしてもらった。 図 4.9 磁気浮上型水力発電機モールドイメージ 左側の軸受を上面から見た場合(内側) 右側の軸受を上面から見た場合(内側)
26 左側の軸受を正面から見た場合(外側) 右側の軸受を正面から見た場合(外側) 図 4.10 軸受のコイルの大きさ 実際にモールドしてもらった物が図 4.11 である。モールドの樹脂は黒色のも のを使用し、磁気軸受の中には永久磁石が内蔵されているため、その永久磁石の 磁力を損なわないように低温でモールドすることのできる樹脂を選択してもら った。
27
28
第
5 章 「るなぱあく」での実験
5.1 新技術、経済性の検討項目
今回検証する水力発電機は磁気浮上技術を使用しているため、軸受を変更し たときの効率の上昇を目標として磁気軸受と玉軸受による効率を比較した。ま た、水力発電機の制御方式の違いによる発電特性、消費電力の比較を行った。5.2 磁気軸受と玉軸受の発電効率の比較
1 ) 実験方法 本研究室の水力発電機には図 5.1 のようにロータよりも径が 1 ㎜大きい補助 軸受が取り付けてある。そこに厚さ 0.5 ㎜のアクリル板を 4 枚はめ込み、磁気軸 受を取り外すことでボールベアリングへの変更を実現している。この玉軸受と 磁気軸受をそれぞれ使用して、「るなぱあく」にて発電実験を行った。 図 5.1 玉軸受29 図 5.2 発電実験回路(70Ω) 発電機を磁気浮上型水力発電機の左右にそれぞれ取り付け、合計 2 つの発電 機を使用する。図 5.2 のように整流回路を使用して 2 つの発電機を直流へと変 換した後、その発電機の出力を並列に接続し、そこから巻線型の抵抗器 70Ωへ と接続する。計測用の塩ビ管のバルブを使用してバルブを閉めた状態から少し ずつ開いていくことで水力発電機に流す流量を変化させ計測を行った。流量は 発電機の回転し始める計測ができる流量から水力発電機の制御ができる 4.4 L/s まで変化させた。電流センサを用いて巻線型の抵抗器に流れている電流を計測 し、テスターを用いて巻線型の抵抗器の電圧を計測した。発電機の電圧が 54 V 以下だったため、電圧リミッタは使用しなかった。磁気軸受を用いた際の制御方 法は、玉軸受に条件が近いと思われる PID 制御で浮上を行った。 2)実験結果と考察 巻線型の抵抗器に流れる電流と電圧をかけ合わせて電力を計算し、玉軸受と 磁気軸受の場合に分けて流量に対する電力のグラフをプロットした。 結果を図 5.3 に示す。グラフから読み取れるように玉軸受を使用したときより も磁気軸受を使用したときの方が 7%程度効率の上昇が見込めることが分かっ た。このことから磁気軸受を使用すると玉軸受と比較して発電効率を上昇させ ることが出来る。
30 図 5.3, 玉軸受と磁気軸受による発電量の比較
5.3 制御方式による特性の比較
パソコンのシミュレーションソフトを使用して磁気浮上型水力発電機で発電 している際の PD 制御、PID 制御、ゼロパワー制御の 3 つの制御方法でロータ の浮上位置の比較を行った。 1)PD 制御 図 5.4~5.6 にそれぞれの制御方式で発電している時の水車ロータの浮上位置 を示す。CH1~CH4 は水力発電機のロータの近くの左右に設置してあるセンサ で得た水車の浮上位置を表している。PD 制御は浮上位置に目標値を設定できな い為、磁気軸受の浮上の中心点からずれて浮上している。 図 5.4 水車の浮上位置(PD 制御) 2)PID 制御 PID 制御では磁気軸受の中心点に目標値を設定できるため、浮上位置が目標 値であるゼロ点に近くなっている。 0 1 2 3 4 5 6 7 0 1 2 3 4 5 P ow er [W ] Flow Rate[L/s] 玉軸受 磁気軸受31 図 5.5 水車の浮上位置(PID 制御) 3)ゼロパワー制御 ゼロパワー制御では磁気軸受と流れる水との力のつりあいの位置に水車の浮 上位置を設定するため軸受の中心点から少しだけずれた位置で安定して浮上し ている。 図 5.6 水車の浮上位置(ZEROPOWER 制御)
5.4 バッテリチャージャの特性試験
1)実験方法 バッテリチャージャの特性を検討するためにシャント抵抗 100Ω を負荷とし て発電機に取り付けた場合と比較して発電実験を行った。測定用の塩ビ管のバ ルブを使用して流量を調節した。流量は、発電機が回転し測定を行える 2.2 L/s~4.4 L/s まで変化させた。シャント抵抗 100Ωの場合は図 5.7 のように発電 機の出力を整流した後、シャント抵抗 100Ωに繋ぎ、抵抗に流れる電流を電流セ ンサで測定した。また、抵抗に流れる電圧をテスターで測定した。実験を行った 時の制御方式は FPGA を用いた PD 制御で実験を行った。32 図 5.7 発電実験回路(100Ω) バッテリチャージャを用いた発電実験回路は図 5.8 のように発電機の出力を 整流した後、バッテリチャージャを通してバッテリに繋ぎバッテリチャージャ の出力を電流センサとテスターで測定した。 流量の調節や制御方法はシャント抵抗 100Ωを負荷とした場合と同様に行っ た。 図 5.8 発電実験回路(バッテリチャージャ)
33 図 5.9 バッテリチャージャとシャント抵抗 100Ωの比較 2)実験結果と考察 バッテリチャージャとシャント抵抗 100Ωの流量に対する発電量を比較した グラフを図 5.9 に示す。バッテリチャージャを用いて発電実験を行った時の方が シャント抵抗を用いて発電した時よりも発電量が大きくなることが分かった。 バッテリチャージャの発電量が抵抗で消費する発電量よりも大きくなった要 因としてバッテリチャージャにある MPPT(Maximum Power Point Tracking) という主にソーラー発電などに見られる最大電力点追従制御という機能がつい ていることで発電効率が良くなったのではないかと考えられる。図 5.10 のよう に MPPT で電圧を一定時間ごとに変化させ、その中で発電機の電流×電圧の最 適な動作点を自動で見つけ出すことにより発電効率をよくすることが出来るの ではないかと考えられる。
34 図 5.10 MPPT の電圧変化
5.5 制御方式による発電効率の比較
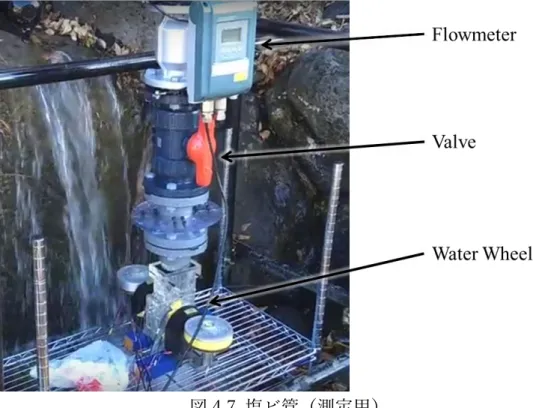
(1)発電効率の検証 1)概 要 「るなぱあく」の発電機設置場所へ水力発電機を設置し、発電性能の確認のた めの流量、発電機回転数、電流・電圧測定を実施した。 2)発電使用水量の確認 (実証方法) 水車に水が流れ込む水路の途中に流量計を取り付けることで流量の測定を行 った。(図 5.11) その結果、流量は最大 5.4 L/s までしか増加せず予定の流量を得ることが出来 なかった。35 図 5.11 流量計の設置 (考察) 水力発電機を取り除き流量の測定を行ったところ、流量は 9.7 L/s まで流れた。 水力発電機自体が管路抵抗となってしまい水力発電機を取り付けた状態で流量 を測定したところ最大流量が 5.4 L/s までしか行かないことが分かった。 3)発電効率の検証 (実証方法) 流入量の測定と同時に発電電圧(V)と電流(I)及び充電電圧(V)と電流 (A)を測定。 測定結果を図 5.12~5.14 に示す。図 5.12~5.14 は、それぞれ流量に対する充 電電力、発電電力、消費電力となっている。消費電力に関して PD 制御よりも ZEROPOWER 制御の方が少なくなっていることが分かる。 図 5.12 充電電力 図 5.13 発電電力
36 図 5.14 消費電力 (考察) 流量が増加した際に発電機と水車ロータを接続しているマグネットカップリ ングが外れてしまう問題が発生したため問題を検証するために発電機の出力を 整流した後、抵抗 10~70Ωを 10Ωずつ変化させて繋げた。そのときマグネット カップリングが外れるまで流量を少しずつ増加させていきそのときの抵抗に流 れる電圧、電流、発電機の回転数を計測した。 図 5.15 流量に対する各測定結果のグラフ
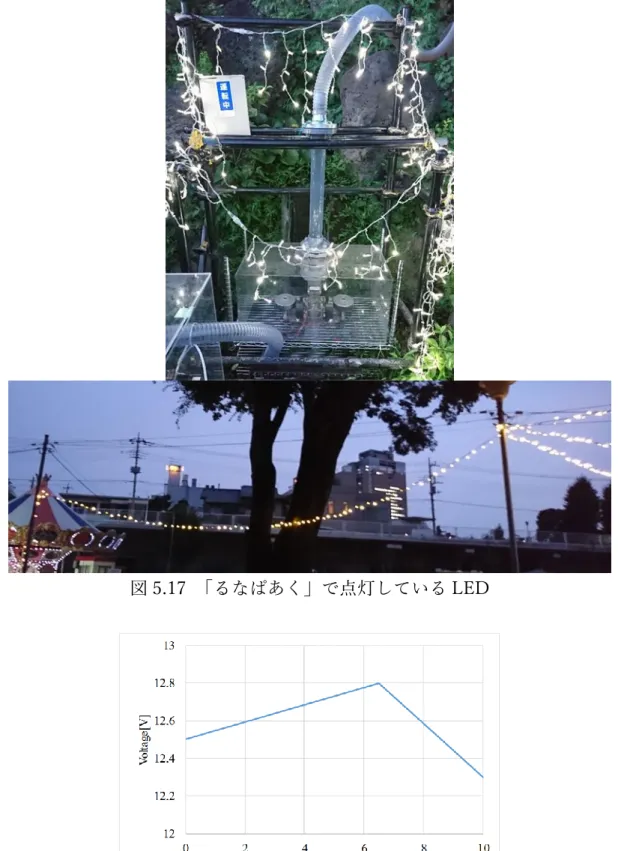
37 図 5.15 の流量に対する電流のグラフから分かるように電流が一定以上に達す るとマグネットカップリングが外れてしまっている。このことから考察される ことは、電流が増加することで発電機を回転させるトルクが増加しマグネット カップリングで発電機に力を伝達するのに上限があり、その力を超えると動力 を伝達できなくなってしまうのではないかと考えられる。 そこで PID 制御で水車の浮上位置を変化させてマグネットカップリングのエ アギャップを変更したときの制御できる流量を測定した。実験は発電機の出力 を 70Ωの抵抗につなぎマグネットカップリングが外れる直前までの流量と電圧 を水車の浮上位置をロータの浮上の中心点を 0 点として-0.2mm~0.4mm の間 で 0.1mm ずつ変化させてそれぞれ測定した。その結果を図 5.16 に示す。 図 5.16 水車の浮上位置を変化させたときの流量の変化 図 5.16 からマグネットカップリングのエアギャップを小さくすると制御でき る流量が増加することが分かる。それにより発電電力も増加することが分かっ た。 4)発電電力の使用方法 発電した電力を利用して LED の点灯を行った。 昼間に発電した電力をバッテリに充電し、夜間に LED を点灯させ電力の消費 を行った。点灯させた LED の様子及び、その時のバッテリの電圧の変化を測定 したのでその結果を図 5.17、5.18 に示す。
38
図 5.17 「るなぱあく」で点灯している LED
図 5.18 バッテリの電圧変化 図 5.17 に LED の点灯の様子を示す。
39 水力発電機で発電した電力をバッテリに充電し、そこからインバータを介し て LED を点灯させている。 「るなぱあく」の夜間営業の時間を利用して 18:00~21:00 の間で LED を点 灯させ続けている。 図 5.18 にバッテリの電圧変化を示す。 充電電流は 0.15A である。グラフから充電の量を 2 倍程度に増加させると LED を 3 時間程度点灯させる電力を補うことができると分かった。
40
第
6 章
問題点および課題
上記の実証試験において以下の技術的問題が挙げられる。 1)発電量が少ない 2)マグネットカップリングの性能の向上 3)消費電力の低減6.1 今後の取組みについて
上記の問題点及び課題を受けその解決策について検討し、今後の取り組みに ついての方針を検討した。 1)発電量が少ない 水力発電機に流し込める流量が制限されてしまうため、今後の実験において 水車に水を流すときの有効落差を大きくすることで水車に流し込める流量を増 加させることが出来る。流量を増加させることにより水力発電機の発電量の増 加を見込むことが可能だと考察できる。 2)マグネットカップリングの性能の向上 現在のマグネットカップリングでは、ロータから発電機へと一定の動力以上 の力を伝わらせることが出来ないため、エアギャップを小さくすることなどし てマグネットカップリングに使用されている永久磁石の磁束を強めることが必 要になってくると考察した。 3)消費電力の低減 水力発電機の浮上力を確保するために電力を使用しており、それが、発電量を 上回っていることが問題にある。その問題を解決するために、マイコンの FPGA のプログラムを書き換え、制御方式を PD 制御からゼロパワー制御へと変更す ることが必要である。41
6.2 まとめ
バッテリから充電するための回生部の製作を行い、充電システムを完成させ た後に、磁気軸受のモールドなどを行い実証実験のできる準備を整えた。 そして「るなぱあく」で実証実験を行い、磁気浮上型水力発電機の発電特性や バッテリチャージャの回路特性などの検証を行った。 そこで、”6.1 今後の取り組みについて”で書いてあるような様々な課題が見つ かったため、その課題を解決していくことに尽力していきたいと考えている。42
謝辞
本研究室は本実証試験で平成27年度からマイクロ水力発電機の設計・開発 と製作を重点に実施し、実験を重ねることで発電効率の向上を計ってきました。 しかし、マイクロ水力発電機の発電量といたしましては、とても小さなもので今 回の実験の評価としては十分な評価が出来たというにはいたらなかったもので あると感じております。 しかし、本研究室が今回提案しましたマイクロ水力発電機は、磁気浮上技術と いうメリットを活かす利用方法により、より大きな効果が発現できる可能性を 持っていると思われます。 今後、再生可能エネルギーを取り巻く社会環境の追い風、それに伴う技術開発 の伸長によりより小さな河川、用水路においてより適したマイクロ水力発電機 が誕生することを期待し、本研究室としてもそのような技術の発展に尽力して いきたい所存でございます。 本研究を進めるにあたり、多大なるご指導を頂いた栗田伸幸准教授,遠坂俊昭 客員教授に心から感謝とお礼を申し上げます。 主査,副査としてご指導頂きました石川赴夫教授,橋本誠司教授に感謝いたし ます。 また、本研究を進めるにあたり様々な協力や激励をいただきました栗田研究 室の大学院生,卒業研究生の皆様に深く感謝いたします。 なお、本事業の実施にあたっては、前橋市環境政策課ならびに「るなぱあく」 管理事務所の多大なるご支援、ご協力により計画を進めてまいりました。この場 をお借りして関係者の皆様に対し謝意を申し上げます。43
参考文献
[1] 篠原悠,ラジアル方向着磁磁石の有無による 2 種類のローレンツ力型磁気 ベアリングの開発,群馬大学大学院工学研究科電気電子工学専攻,2012 [2] 大塩佳祐,三次元的な磁気回路を有する永久磁石ハイブリッド型 磁気軸受の開発,群馬大学大学院工学研究科電気電子工学専攻,2011 [3] 大快健一,磁気浮上技術を利用した小型水力発電システムの開発,群馬 大学大学院工学部電気電子工学科,2013 [4] 舩渡川拓哉,磁気浮上型電力貯蔵フライホイールの浮上回転特性に関する 研究,第3 回電気学会栃木・群馬支所合同研究発表会,2013 [5] 船渡川拓哉,磁気軸受を適用した水力発電機・電力貯蔵システムの開発,群 馬大学大学院工学府電子情報・数理教育プログラム,2014 [6] 株式会社スカイ電子,自転車発電機 SKY-HR125PDF カタログ[7]Nobuyuki Kurita, Takeo Ishikawa, Ken-ichi Daikai and Keisuke Ohshio, “A study on dynamic characteristics and the power generation characteristics of the magnetically levitated hydraulic generator”, Int. J. Advan. Mech. Syst., 5, 3, 193-201 (2013)
[8]Nobuyuki Kurita, Keisuke Ohshio, Takeo Ishikawa, “Design of permanent magnet hybrid magnetic bearing with minimum salient poles”, JSDD, 5, 5, 829-840 (2011) [9]Nobuyuki Kurita, Takeo Ishikawa, Keisuke Ooshio, “A Study on Dynamic Characteristics of a Permanent Magnet Hybrid Magnetic Bearing for a Small-sized Hydrodynamic Generator”, Proc. of ICAMechS2012, 154-159 (2012)
[10]栗田 伸幸, 石川 赴夫, 船渡川 拓哉, “マイクロ水力発電機用磁気軸受の磁 気浮上特性”, 平成 26 年電気学会全国大会, Paper No. 5-074, pp. 129 (2014) [11]中村 拓海, 栗田 伸幸, 石川赴夫, “磁気浮上型水力発電機の発電特性と携帯 性向上に関する研究”, Proc. of MoViC2015, 302-305(2015) [12]中村拓海,栗田伸幸,石川赴夫,磁気浮上型水力発電機に適用する低消費電 力渦電流式変位センサの製作,MAGDA コンファレンス 2016 論文集